Изобретение относится к ракетной технике, в которой создание жидкостных ракетных двигателей с минимальными начальными продольными и радиальными габаритами, с минимально возможной массой является всегда актуальным, особенно для верхних ступеней ракет-носителей с высотными жидкостными ракетными двигателями с соплами большой степени расширения, а более конкретно к устройству жидкостного ракетного двигателя с выдвижным соплом.
Известны жидкостные ракетные двигатели с выдвижным соплом, содержащие камеру с соплом из двух частей, одна из которых смонтирована неподвижно с камерой сгорания, а вторая выполнена с возможностью перемещения вдоль оси сопла (см. патент США №4383407 от 17.05.1983 г. Thikol Corporation, автор Frank S. Ihman, МКИ F02K 1/09).
На указанном жидкостном ракетном двигателе изменение степени расширения сопла осуществляется выдвижением подвижной части сопла с помощью механизма выдвижения, закрепленного на неподвижной части сопла и выполненного в виде привода, соединенного с винтовыми штангами, взаимодействующими с ответными частями, установленными на подвижной части сопла. Такое выдвижное сопло имеет постоянную скорость выдвижения подвижной части сопла. Для достижения переменной скорости выдвижения необходимо регулировать работу привода во времени, что не всегда выполнимо. Кроме того, винтовые пары требуют обеспечения синхронизации вращения при выдвижении подвижной части сопла, а следовательно, дополнительных кинематических связей между ними или наличия нескольких автономных приводов, что увеличивает массу жидкостного ракетного двигателя.
Известен также жидкостный ракетный двигатель с выдвижным соплом, содержащий камеру с соплом из двух частей, одна из которых, смонтированная неподвижно с камерой сгорания, снабжена механизмом выдвижения в виде привода, исполнительного механизма и узлов направления и фиксации в конечном положении, а вторая выполнена с возможностью перемещения вдоль оси сопла с возможностью кинематического взаимодействия с узлами направления и фиксации (патент РФ №2180405 от 26.05.2000 г. МКИ F02K 9/97 - прототип).
Известный жидкостный ракетный двигатель с выдвижным соплом обеспечивает изменение степени расширения сопла с повышенной скоростью выдвижения подвижной части сопла за счет жесткой кинематической связи подвижной части сопла с неподвижной, которую обеспечивает пантограф. Однако в таком жидкостном ракетном двигателе необходимо предусматривать устройства принудительного торможения выдвижной части сопла на конечном этапе выдвижения для уменьшения ударного воздействия выдвижной части сопла на неподвижную часть сопла, узлы фиксации и направления. Применение гасителей ударного воздействия, гидравлических или иных амортизаторов не всегда возможно.
Целью предлагаемого изобретения является устранение вышеуказанных недостатков и уменьшение радиальных габаритов, массы и снижение динамических нагрузок на сопло при выдвижении на конечном участке выдвижения.
Приведенные выше недостатки исключены в предлагаемом изобретении.
Указанная выше цель изобретения достигается тем, что в известном жидкостном ракетном двигателе исполнительный механизм выполнен в виде двух соосных с неподвижным соплом и между собой одной неподвижной и другой, выполненной с возможностью вращения относительно неподвижной, обечаек с расположенными между обечайками подшипниками и узлом ограничения взаимного осевого перемещения вдоль продольной оси сопла, а на второй обечайке, связанной кинематически с приводом вращательного перемещения через кинематический узел, и на наружной части смонтированной с возможностью перемещения части сопла равномерно по окружности расположены цапфы с установленными на их концах сферическими подшипниками, соединенными шатунами.
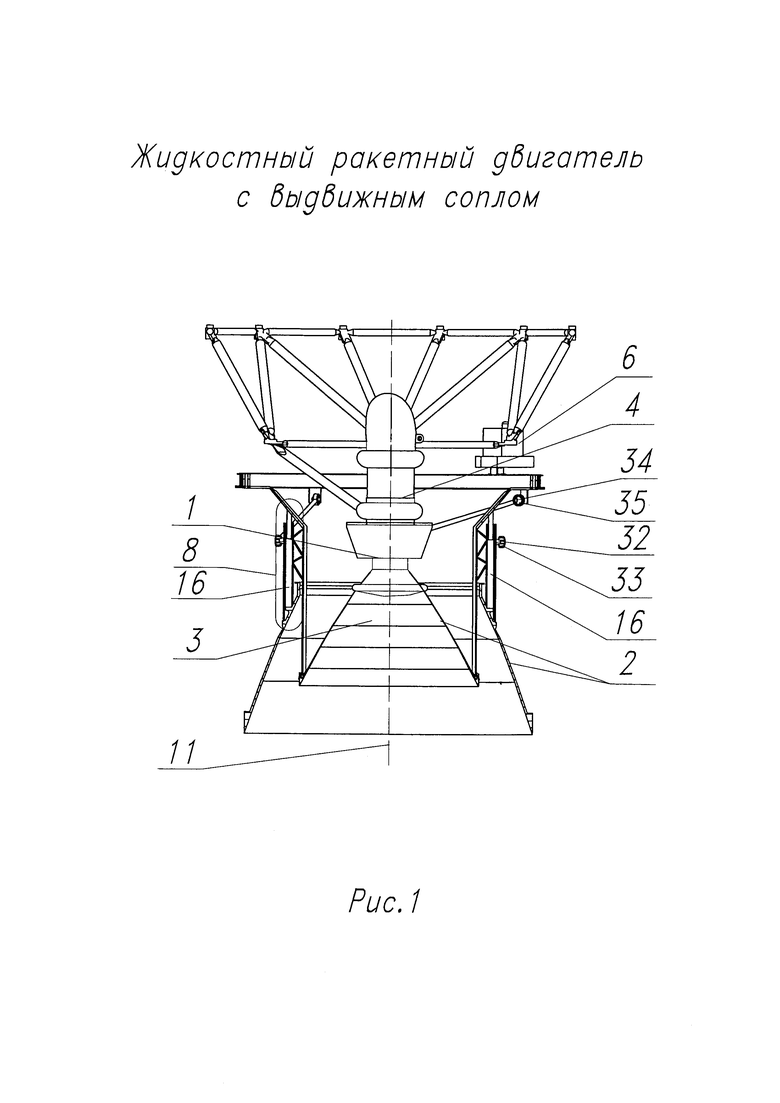
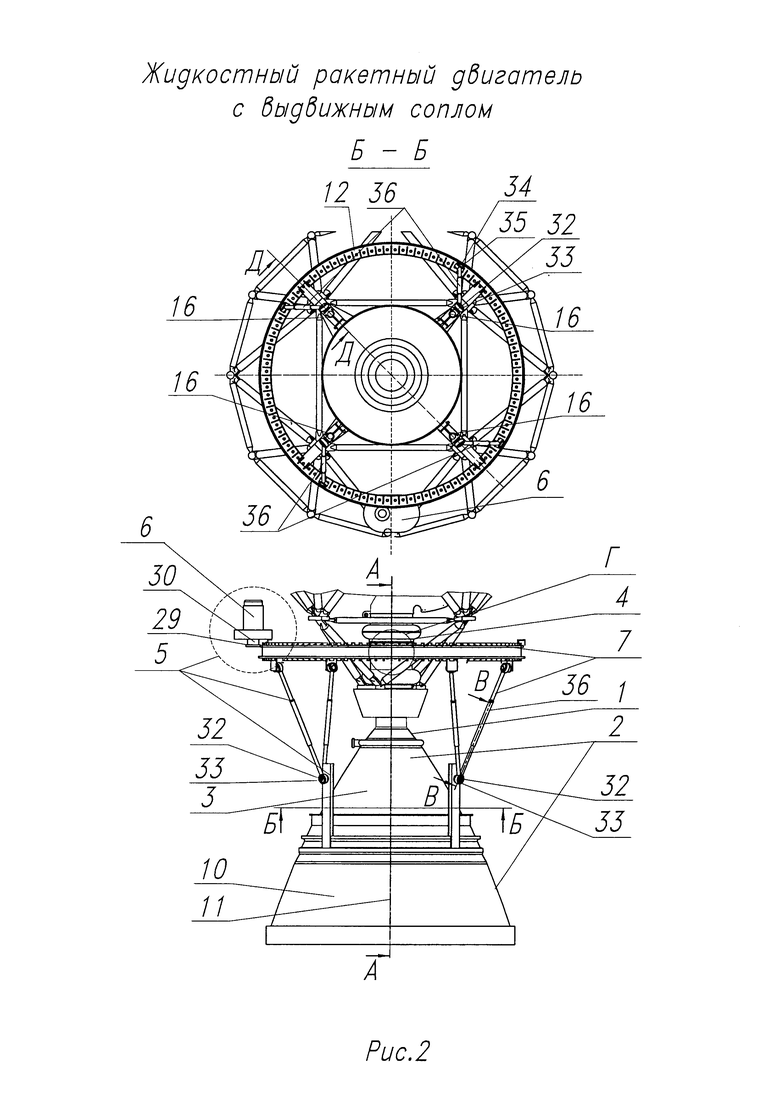
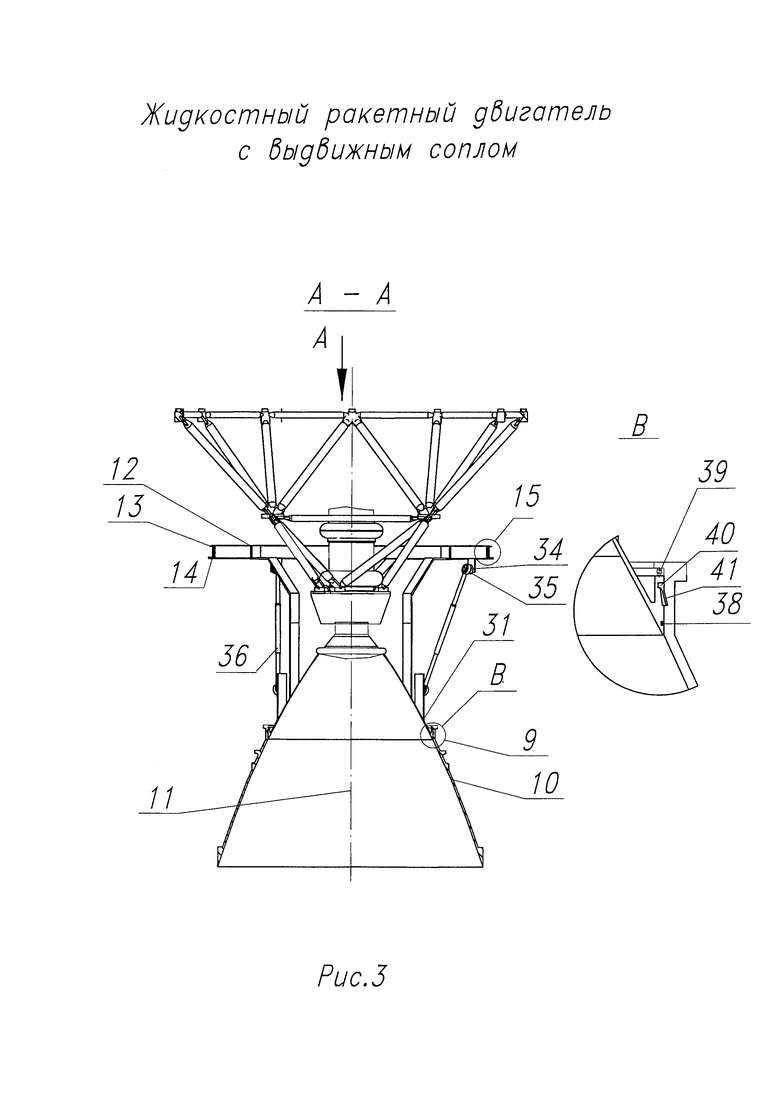
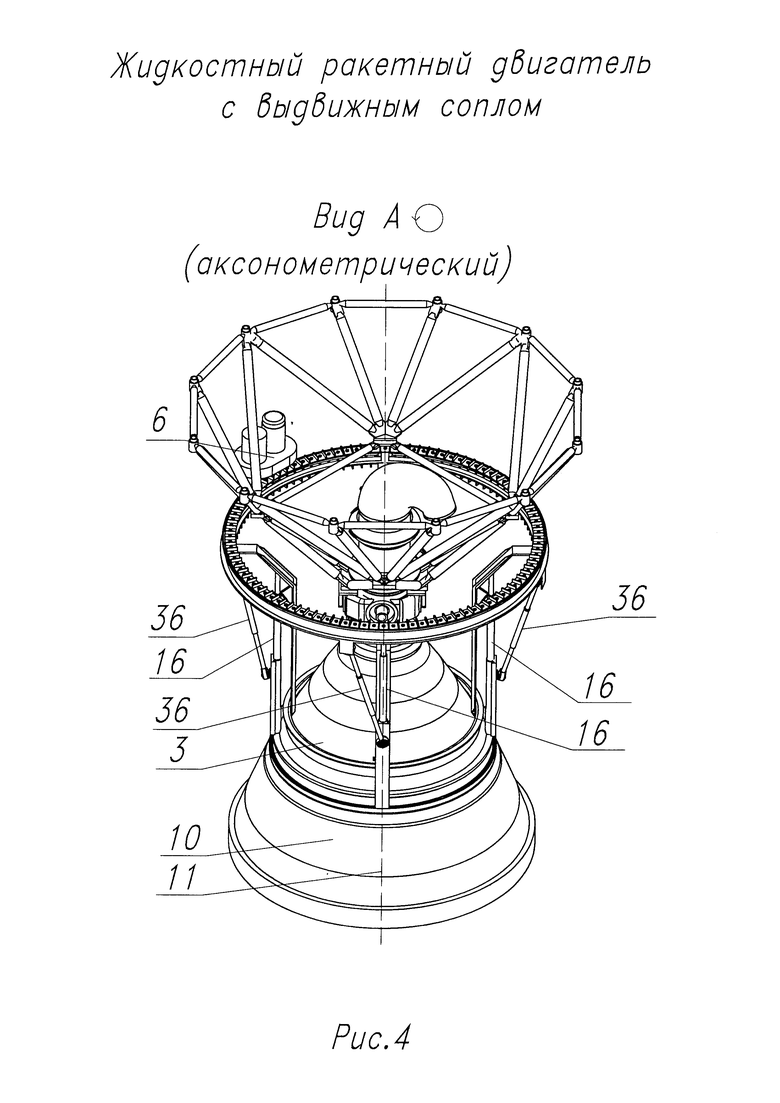
Предлагаемое изобретение представлено на рис. 1-5, где показаны следующие агрегаты:
1 Камера
2 Сопло
3 Неподвижная часть сопла
4 Камера сгорания
5 Механизм выдвижения сопла
6 Привод
7 Исполнительный механизм
8 Узел направления перемещения
9 Узел фиксации
10 Выдвижная часть сопла
11 Продольная ось симметрии сопла
12 Неподвижная обечайка
13 Подвижная обечайка
14 Подшипник
15 Узел ограничения осевого перемещения подвижной обечайки
16 Направляющая штанга
17 Радиальный бурт
18 Радиальный бурт
19 Винт
20 Винт
21 Торец неподвижной обечайки
22 Торец неподвижной обечайки
23 Ребро
24 Ребро
25 Проем
26 Проем
27 Внешняя часть подвижной обечайки
28 Элемент кинематического узла подвижной обечайки
29 Элемент кинематического узла привода
30 Вал привода
31 Внешняя часть выдвижной части сопла
32 Цапфа
33 Сферический подшипник
34 Цапфа
35 Сферический подшипник
36 Шатун
37 Поперечное сечение шатуна (профиль)
38 Уплотнение
39 Датчик контроля выдвинутого положения выдвижной части сопла
40 Фиксатор
41 Кольцевая канавка
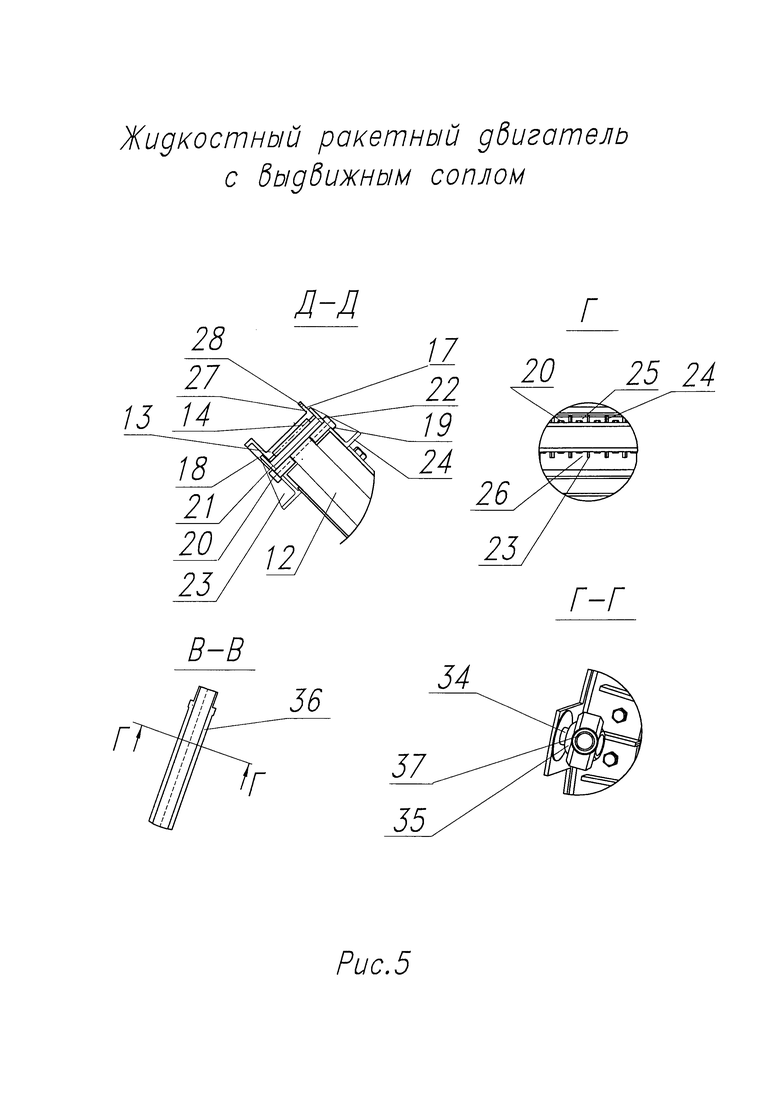
Жидкостный ракетный двигатель с выдвижным соплом содержит камеру 1 с соплом 2 из двух частей. Одна неподвижная часть сопла 3 смонтирована неподвижно с камерой сгорания 4 и снабжена механизмом выдвижения 5 в виде привода 6, исполнительного механизма 7, узлом направления 8 и узлом фиксации 9. Узел фиксации 9 обеспечивает неразъемное соединение выдвижной части сопла 10 с неподвижной частью сопла 3 при выдвинутом положении выдвижной части сопла 10. Выдвижная часть сопла 10 выполнена с возможностью перемещения вдоль продольной оси симметрии сопла 11 и с возможностью кинематического взаимодействия с узлом направления перемещения 8 и узлом фиксации 9. Исполнительный механизм 7 выполнен в виде двух соосных с неподвижной частью сопла 3 и между собой одной неподвижной обечайки 12 и подвижной обечайки 13, выполненной с возможностью вращения относительно неподвижной обечайки 12. Между обечайками 12 и 13 расположены подшипники 14. На неподвижной обечайке 12 установлен узел ограничения осевого перемещения подвижной обечайки 15 относительно неподвижной обечайки 12 вдоль продольной оси 11 сопла 3, позволяя подвижной обечайке 13 совершать только вращательное движение в отличие от осевого перемещения подвижной части сопла 3 по направляющим штангам 16 узла направления перемещения 8. Узел ограничения осевого перемещения подвижной обечайки 15 выполнен в виде радиальных буртов 17 и 18, снабженных винтами 19 и 20, скрепленных с торцами 21 и 22 неподвижной обечайки 12. Для уменьшения массы на радиальных буртах 17 и 18, взаимодействующих с подвижной обечайкой 13, выполнены выборки материала с образованием ребер 23 и 24 и проемов 25 и 26, равномерно расположенных по торцам обечайки 12, в которых размещены винты 19 и 20. На внешней части подвижной обечайки 27 выполнены элементы кинематического узла 28 (например, профили зубчатого зацепления), соединенные с ответными элементами 29 (ответными профилями зубчатого зацепления) вала 30 привода 6 вращательного перемещения подвижной обечайки 13. На внешней части 31 выдвижной части сопла 10 равномерно по окружности ее поперечного сечения расположены цапфы 32 (например, радиальные). На цапфах 32 установлены сферические подшипники 33. На внешней части 34 подвижной обечайки 13 также равномерно по окружности поперечного сечения подвижной 13 обечайки установлены цапфы 34 с установленными на их концах сферическими подшипниками 35. Цапфы 32 с установленными на них сферическими подшипниками 33 соединены шатунами 36 с цапфами 34, с установленными на их концах сферическими подшипниками 35. Шатуны 36 выполнены с профилями поперечных сечений 37 (например, трубчатыми), что снижает их массу. На неподвижной части сопла 3 в месте сопряжения с выдвижной частью сопла 10 установлено уплотнение 38, датчик контроля выдвинутого положения выдвижной части сопла 39 и фиксатор 40 в виде разрезного кольца. На выдвижной части сопла 10 выполнена кольцевая канавка 41, взаимодействующая при выдвинутом положении выдвижной части сопла 10 с фиксатором 40 и образующая неразъемное соединение неподвижной части сопла 3 и выдвижной части сопла 10.
При таком выполнении жидкостного ракетного двигателя с выдвижным соплом, когда исполнительный механизм выполнен в виде подвижной обечайки 13, связанной с приводом 6, передающей усилие вращения привода 6 на шатуны 36, связанные с выдвижной частью сопла 10, и размещении подвижной обечайки 13 на периферии двигателя, где с точки зрения уменьшения массы двигателя по ряду причин нецелесообразно размещать агрегаты двигателя, предназначенные для работы в соответствии с его пневмогидравлической схемой, и на меньшем диаметре, чем диаметр среза выдвижной части сопла 10, снижаются радиальные габариты жидкостного ракетного двигателя. Предварительная компоновка однокамерного жидкостного ракетного двигателя с выдвижным соплом, предназначенного для верхней ступени ракеты-носителя "Ангара-5" вместо четырехкамерного двигателя РД-0124А без увеличения как осевых, так и радиальных размеров отсека размещения двигателя, показала целесообразность применения такого двигателя со снижением массы. На конечном участке выдвижения за счет кинематики движения шатунов 36 их части, сопрягаемые через цапфы 34 и сферические подшипники 35 с выдвижной частью сопла 10, перемещаются с переменной падающей скоростью, в то время как подвижная обечайка 13 вращается от привода 6 с постоянной скоростью вращения. Ускорение осевого перемещения выдвижной части сопла 10 вдоль продольной оси 11 сопла 2 на конечном участке выдвижения также снижается, за счет чего ударное инерционное воздействие на неподвижную часть сопла 3 не превышает допустимого значения. В этом случае узел стыка неподвижной части сопла 3, его сопрягаемую с выдвижным соплом часть, расположенные в нем узлы фиксации выдвижной части сопла 9, уплотнения 38 можно выполнять с меньшими толщинами и массой.
Жидкостный ракетный двигатель с выдвижным соплом работает следующим образом. При работе в земных условиях или нахождении жидкостного ракетного двигателя с выдвижным соплом в отсеке верхней, например, второй ступени ракеты-носителя выдвижная часть сопла 10 находится в исходном положении (рис. 1).При подъеме ракеты-носителя с работающим двигателем или при необходимости работы в составе верхней ступени ракеты-носителя после отделения предыдущей ступени привод 6 начинает работу, вращая подвижную обечайку 13 посредством вала 30 и элементов кинематического узла 28 и 29, передавая через шатуны 36 усилие на выдвижную часть сопла 10. Узел направления перемещения 8 с помощью направляющих штанг 16 препятствует вращению выдвижной части сопла 10, позволяя перемещаться выдвижной части сопла 10 только вдоль продольной оси симметрии 11 сопла 2. Сферические подшипники 33 и 35 в цапфах 32 и 34 и в шатунах 36 позволяют преобразовать вращательное движение подвижной обечайки 13 в поступательное движение выдвижной части сопла 10 и обеспечивают самоустановку шатунов 36 по мере выдвижения. В конечном положении выдвижения выдвижная часть сопла 10 фиксируется с помощью узла фиксации выдвижной части сопла 9. При движении выдвижной части сопла 10 фиксатор 40 утапливается в кольцевую канавку 41, препятствуя возвратному поступлению выдвижной части сопла 10. Разъем между участками сопел герметизируется с помощью уплотнения 38. В конечном положении выдвижной части сопла 10 шатуны 36 занимают положение под острым углом (определяется с применением известных методов проектирования) относительно плоскости, проходящей через продольную ось симметрии 11 сопла 2, не достигая положения "мертвой" точки, что потребовало бы больших усилий привода 6 для установки сопла в узле фиксации 9 выдвижной части сопла 10 и сопряжения с уплотнением 38. Датчик контроля выдвинутого положения выдвижной части сопла 39, взаимодействуя с выдвижной частью сопла 10, позволяет регистрировать положение сопла 2 на новом режиме работы двигателя и дать команду о переходе жидкостного ракетного двигателя на новый алгоритм управления двигателем. Далее жидкостный ракетный двигатель работает с соплом 2 увеличенной степени расширения, обеспечивая повышенную экономичность двигателя с удлиненным соплом 2.
Предварительные проработки для вновь разрабатываемого двигателя показали эффективность предлагаемого технического решения для уменьшения радиальных габаритов и массы двигателя. Предварительная компоновка однокамерного жидкостного ракетного двигателя с выдвижным соплом, предназначенного для верхней ступени ракеты-носителя "Ангара А5" вместо четырехкамерного двигателя РД-0124А без увеличения как осевых, так и радиальных размеров отсека размещения двигателя, показала целесообразность применения такого двигателя со снижением радиальных габаритов и массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ВЫДВИЖНЫМ СОПЛОМ | 2016 |
|
RU2612691C1 |
| СПОСОБ РАБОТЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ФОРСАЖЕМ | 2023 |
|
RU2813564C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2021 |
|
RU2755363C1 |
| СПОСОБ КОМПЛЕКТАЦИИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2708014C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2158838C2 |
| ДВУХКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2016 |
|
RU2626618C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2009 |
|
RU2413862C1 |
| Сопло ракетного двигателя | 2016 |
|
RU2620480C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРИЯТИЯ ТЯГИ И ПРОТОКА ДВУХ КОМПОНЕНТОВ ТОПЛИВА | 2013 |
|
RU2555065C2 |
Изобретение относится к ракетной технике, а более конкретно к устройству жидкостного ракетного двигателя с выдвижным соплом. В жидкостном ракетном двигателе исполнительный механизм выполнен в виде двух соосных, с неподвижным соплом и между собой одной неподвижной и другой, выполненной с возможностью вращения относительно неподвижной, обечаек, с расположенными между обечайками подшипниками и узлом ограничения взаимного осевого перемещения вдоль продольной оси сопла, а на второй обечайке, связанной кинематически с приводом вращательного перемещения через кинематический узел, и на наружной части смонтированной с возможностью перемещения части сопла равномерно по окружности расположены цапфы с установленными на их концах сферическими подшипниками, соединенными шатунами. Изобретение обеспечивает снижение динамических нагрузок на сопло при выдвижении на конечном участке, а также уменьшение радиальных габаритов и массы. 5 ил.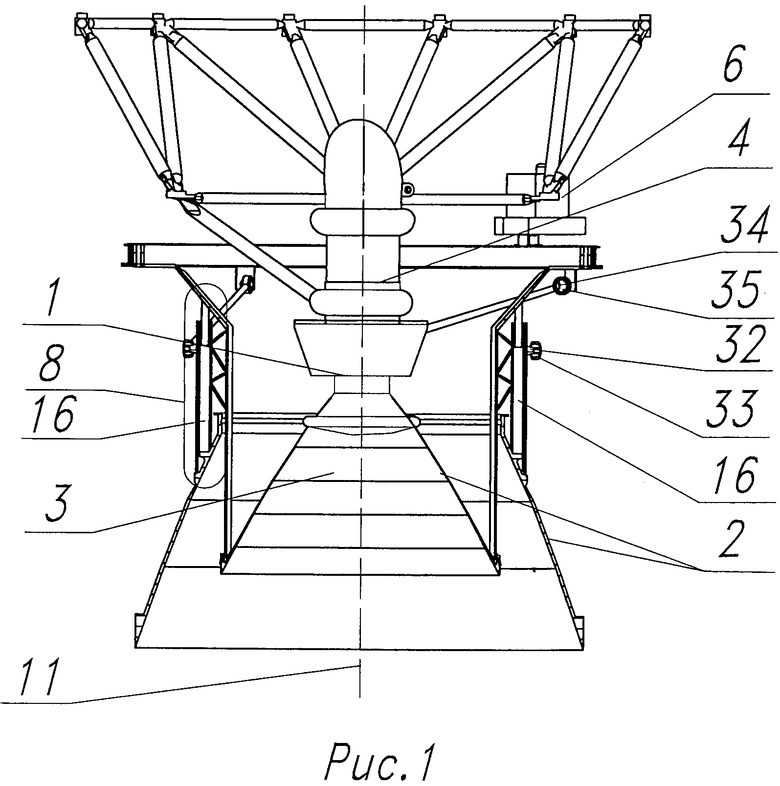
Жидкостный ракетный двигатель с выдвижным соплом, содержащий камеру с соплом из двух частей, одна из которых, смонтированная неподвижно с камерой сгорания, снабжена механизмом выдвижения в виде привода, исполнительного механизма и узлов направления и фиксации в конечном положении, а вторая выполнена с возможностью перемещения вдоль оси сопла с возможностью кинематического взаимодействия с узлами направления и фиксации, отличающийся тем, что исполнительный механизм выполнен в виде двух соосных с неподвижным соплом и между собой одной неподвижной и другой, выполненной с возможностью вращения относительно неподвижной, обечаек с расположенными между обечайками подшипниками и узлом ограничения взаимного осевого перемещения вдоль продольной оси сопла, а на второй обечайке, связанной кинематически с приводом вращательного перемещения через кинематический узел, и на наружной части смонтированной с возможностью перемещения части сопла равномерно по окружности расположены цапфы с установленным на их концах сферическими подшипниками, соединенными шатунами.
| РАЗДВИЖНОЕ СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ | 2000 |
|
RU2180405C2 |
| РАКЕТНЫЙ ДВИГАТЕЛЬ С РАЗДВИЖНЫМ ДИФФУЗОРОМ | 2010 |
|
RU2531009C2 |
| СОПЛО С ВЫСОТНОЙ КОМПЕНСАЦИЕЙ | 2003 |
|
RU2273752C2 |
| РАЗДВИЖНОЕ СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ | 2001 |
|
RU2213239C2 |
| DE 3427169 A1, 30.01.1986 | |||
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГРАФИКА РАБОТЫ СОТРУДНИКОВ УЧРЕЖДЕНИЯ | 2010 |
|
RU2434273C1 |
| US 4676436 A1, 30.06.1987. | |||

