Изобретение относится к ракетной технике, в которой создание жидкостных ракетных двигателей с минимально возможными массой, продольными и радиальными габаритами, является всегда актуальным, особенно для жидкостных ракетных двигателей верхних ступеней ракет-носителей, а более конкретно к устройству двухкамерного жидкостного ракетного двигателя с управляемым вектором тяги с дожиганием генераторного газа
Известны однокамерные жидкостные ракетные двигатели с дожиганием генераторного газа с управляемым вектора тяги за счет качания камеры в шарнирном узле, расположенном в верхней части двигателя над смесительной головкой камеры, содержащие турбонасосный агрегат, газогенератор, магистраль изменяемого направления подвода генераторного газа с избытком одного из компонентов к смесительной головке камеры, расположенную выходной частью вдоль продольной оси камеры, и магистраль подвода недостающего в генераторном газе компонента, например горючего, к камерам (см. патент РФ по МПК F02K 9/66 №2409754 за 2009 г.)
В таком жидкостном ракетном двигателе размещение узла качания над смесительной головкой камеры требует значительных радиальных габаритов двигательного отсека из-за значительной амплитуды перемещения среза сопла при качании камеры. Наиболее значительные амплитуды перемещения среза сопла получаются в жидкостных ракетных двигателях верхних ступеней ракет-носителей с длинными соплами высоких степеней расширения. Кроме того, в однокамерном жидкостном ракетном двигателе для управления по крену необходимо использовать отдельные сопла крена, что сопряжено с потерей экономичности двигателя, например, из-за необходимости использования низкотемпературного генераторного газа после турбины турбонасосного агрегата.
Известны двухкамерные жидкостные ракетные двигатели с дожиганием генераторного газа с управляемым вектором тяги за счет качания каждой камеры в карданных подвесах, расположенных в верхней части двигателя над смесительными головками камер, содержащие общий для двух камер турбонасосный агрегат, газогенератор, гибкие магистрали в виде сильфонов подвода генераторного газа с избытком одного из компонентов к смесительным головкам камер и магистрали подвода недостающего в генераторном газе компонента, например горючего, к камерам для их охлаждения (см. двигатель РД-180).
В этом двухкамерном жидкостном ракетном двигателе кроме управления вектором тяги по тангажу и рысканию возможно управление по крену без дополнительных сопел крена. Кроме того, такой двухкамерный двигатель, обладающий преимуществами перед однокамерным, предназначен для двигательной установки первой ступени ракеты-носителя и позволяет создавать на его основе четырехкамерные двигательные установки из таких двух двигателей с заменой карданного подвеса каждой камеры на подвес с использованием траверс и качанием камер только в одной плоскости. Важным преимуществом двухкамерного двигателя, предназначенного для комплектации форсированной по тяге четырехкамерной "спарки" двух двухкамерных двигателей, является упрощение стендовой наземной отработки на существующей стендовой базе, предназначенной для наземной отработки двигателей меньших тяг, например половину тяги форсируемого двигателя.
Недостатком же двигательных установок верхних ступеней ракет-носителей с размещением узла качания над смесительными головками камер и заданными углами качания камер в карданном подвесе является то, что это приводит к необходимости увеличивать радиальные габариты отсека размещения двигателей из-за значительных размеров выходных сечений сопел и их "размаха" при качании. Форсирование по тяге с одновременным увеличением давлений в камерах сгорания всегда ограничивается охлаждением камер. При форсировании по тяге таких двигателей с ограничением давления продуктов сгорания в камерах в заданных радиальных габаритах двигательного отсека существует ограничение по уровню форсирования и по достижимым степеням расширения сопел (по экономичности) или по углам качания камер, что не всегда приемлемо.
Известен также двухкамерный жидкостный ракетный двигатель с управляемым вектором тяги с дожиганием генераторного газа, содержащий две камеры с возможностью качания каждой в своей плоскости стабилизации в цапфах и траверсах относительно оси качания, проходящей через плоскость минимального сечения сопла камеры, перпендикулярной продольной оси двигателя, и расположенный вдоль продольной оси двигателя общий для двух камер турбонасосный агрегат с турбиной и патрубком отвода генераторного газа, соединенный выходом с помощью последовательных на каждую камеру криволинейного жесткого патрубка, газоводов, а в районе минимального сечения сопла - гибкого трубопровода, перпендикулярного оси качания, с полостью смесительной головки, и установленные на трубопроводах генераторного газа, теплообменники для нагрева газа наддува баков (см. патент РФ по МПК F02k 9/97, патент РФ №2524483 от 27.07.2014 - прототип).
В известном двухкамерном жидкостном ракетном двигателе с дожиганием гибкий трубопровод для подачи генераторного газа от турбины турбонасосного агрегата к смесительным головкам камер расположен в районе минимального сечения камер, что значительно уменьшает требуемый размах сопел камер при качании и улучшает размещение форсируемого двигателя в существующих радиальных габаритах двигательного отсека. В известном двухкамерном жидкостном ракетном двигателе трубопровод подвода генераторного газа к смесительным головкам подсоединен к гибкому трубопроводу в его верхней, ориентированной к смесительной головке, части, в то время как трубопровод подвода генераторного газа от турбины турбонасосного агрегата к гибкому трубопроводу подсоединен к нему в его нижней, ориентированной к соплу, части. При вертикальном расположении турбонасосного агрегата, обеспечивающем минимальные радиальные габариты в отсеке, и верхнем расположении турбины приходится удлинять этот трубопровод для уменьшения кривизны двух поворотов трубопровода (увеличения радиусов изгиба трубопровода) для уменьшения потерь давления генераторного газа и удлинять прямолинейный участок для размещения на нем теплообменников для нагрева газа наддува баков, что требует значительных радиальных габаритов. Применение высокотемпературного наддува баков гелием, предварительно нагретым в теплообменниках двигателя, снижает общую массу газа наддува и массу двигателя в целом за счет уменьшения емкостей хранения газа наддува. Еще более жесткие условия накладываются на радиальные габариты отсека размещения жидкостного ракетного двигателя при выполнении сопла камеры из многих выдвижных коаксиальных секций. Сопло в этом случае состоит из первой неподвижной скрепленной с камерой сгорания части сопла, следующей за минимальным сечением сопла, и из второй, следующей по потоку газа, части, содержащей одну или несколько выдвижных тонкостенных охлаждаемых за счет радиационного излучения обечаек сопла, которые в исходном положении находятся в сложенном состоянии, а в выдвинутом положении обеспечивают высокую степень расширения продуктов сгорания в сопле и получение высокого удельного импульса тяги двигателя при малой массе сопла. Из-за расположения выдвижных секций многосекционного сопла по периферии двигателя только центральная часть отсека может быть использована для размещения других агрегатов, составляющих пневмогидравлическую схему двигателя. Это требует размещения агрегатов в минимально достижимых радиальных габаритах, что не всегда может быть обеспечено даже при уплотненном размещении агрегатов при компоновке. Выбор материала сдвигаемой части сопла для обеспечения радиационного охлаждения стыкуемой с охлаждаемой частью сопла в настоящее время ограничен даже при наличии современных жаростойких и жаропрочных сплавов и композиционных материалов, что не позволяет по требованиям обеспечения работоспособности приблизить стык охлаждаемой радиационным излучением части сопла вплотную к минимальному сечению сопла, однако, для минимизации осевых размеров двигателя расположение стыков охлаждаемого и неохлаждаемого участков сопла необходимо выполнять как можно ближе к минимальному сечению сопла камеры. При этом радиальные габариты двигателя и отсека ракеты-носителя остаются неприемлемо большими при применении сопел с выдвижными насадками, что приводит к увеличению не только массы двигателя, но и массы ракеты-носителя.
Указанное техническое решение не обеспечивает минимальные радиальные габариты двигателя, которые накладывают ограничения на выбор минимального отсека и на обеспечение применения двигателя в стесненных условиях модернизируемых ракет-носителей при их форсировании в прежних размерах, что очень важно для удешевления форсирования при использовании уже существующих агрегатов, не требующих полного цикла отработки.
Целью предлагаемого изобретения является устранение вышеуказанных недостатков и уменьшение радиальных габаритов жидкостного ракетного двигателя, уплотнение компоновки двигателя в радиальном направлении и за счет этого уменьшение массы двигателя.
Приведенные выше недостатки исключены в предлагаемом изобретении.
Указанная выше цель изобретения достигается тем, что в двухкамерном жидкостном ракетном двигателе с управляемым вектором тяги, содержащем две камеры с возможностью качания каждой в своей плоскости стабилизации в цапфах и траверсах относительно оси качания, проходящей через плоскость минимального сечения сопла камеры, перпендикулярной продольной оси двигателя, и расположенный вдоль продольной оси двигателя общий для двух камер турбонасосный агрегат с турбиной и патрубком отвода генераторного газа, соединенный выходом с помощью последовательных на каждую камеру криволинейного жесткого патрубка, газоводов, а в районе минимального сечения сопла - гибкого трубопровода, перпендикулярного оси качания, с полостью смесительной головки, и установленные на трубопроводах генераторного газа теплообменники для нагрева газа наддува баков, гибкий трубопровод ориентирован и установлен входом генераторного газа по направлению к смесительной головке камеры, а выходной частью, соединенной газоводом со смесительной головкой, в обратном от смесительной головки камеры направлении, причем теплообменники установлены на газоводах на участках от гибкого трубопровода до смесительной головки камеры.
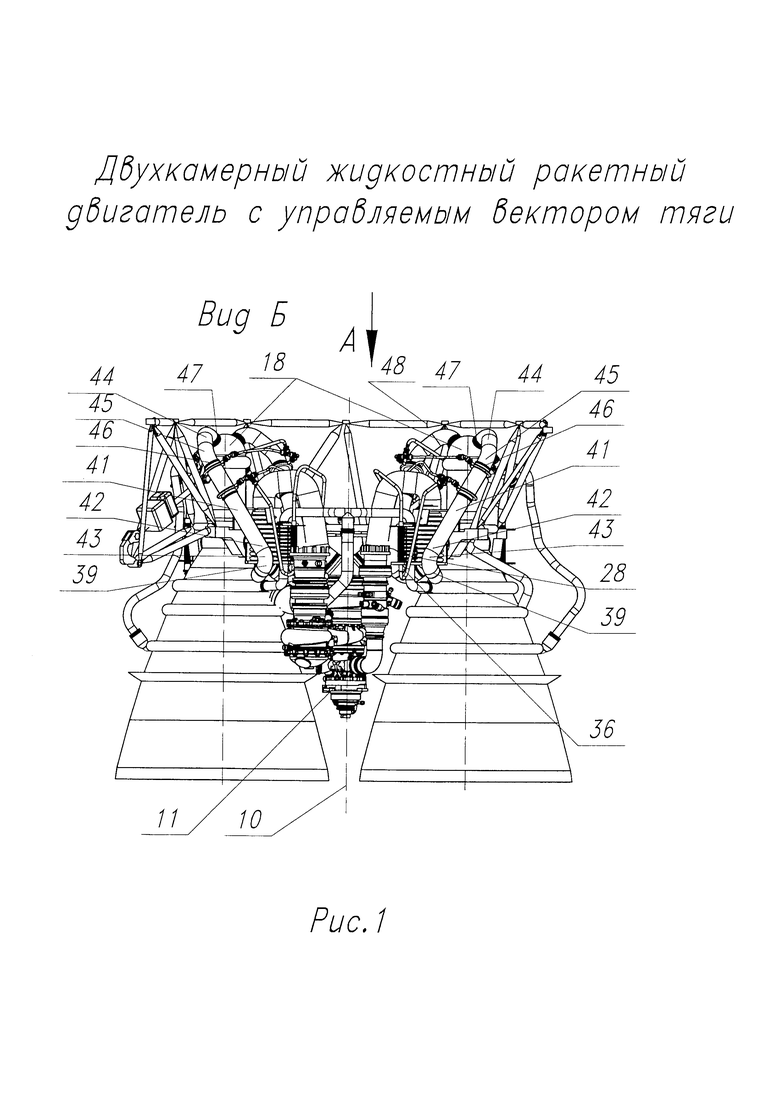
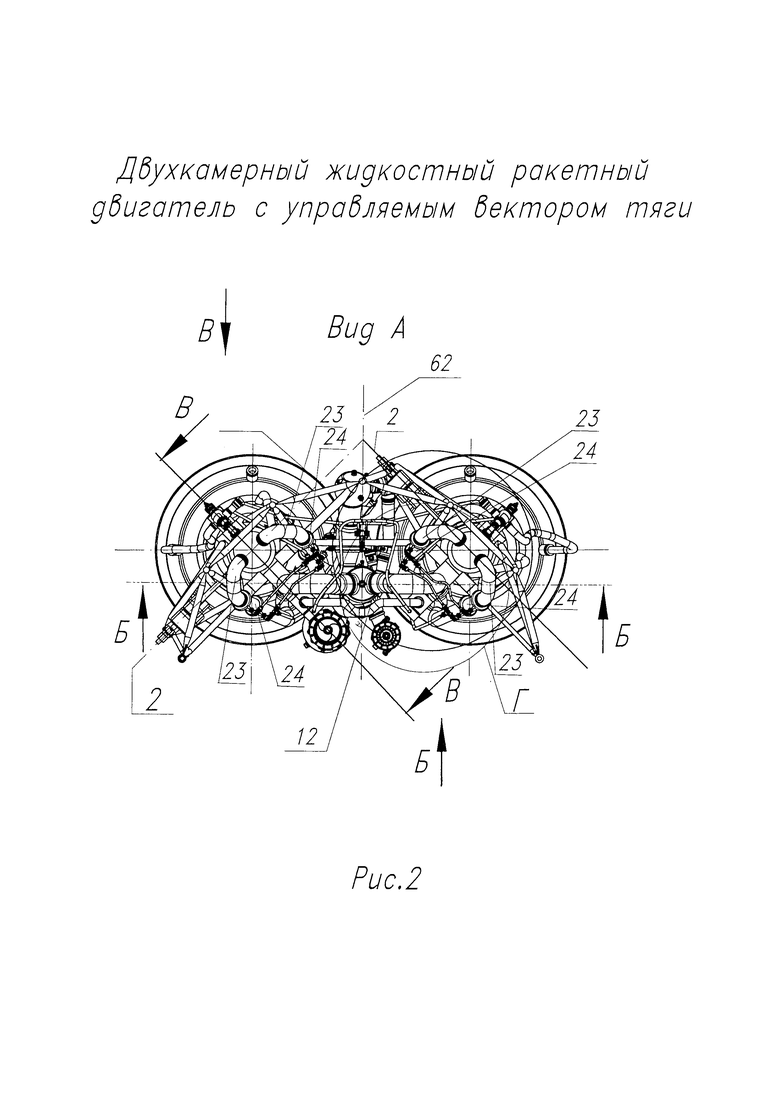
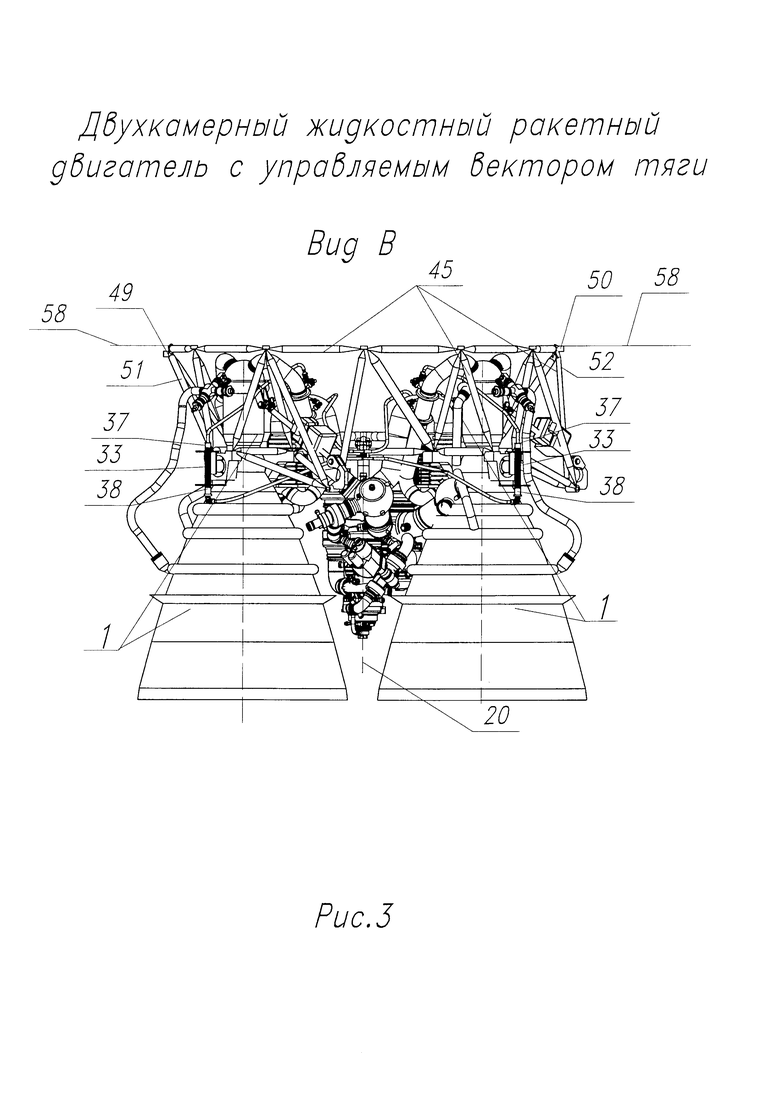
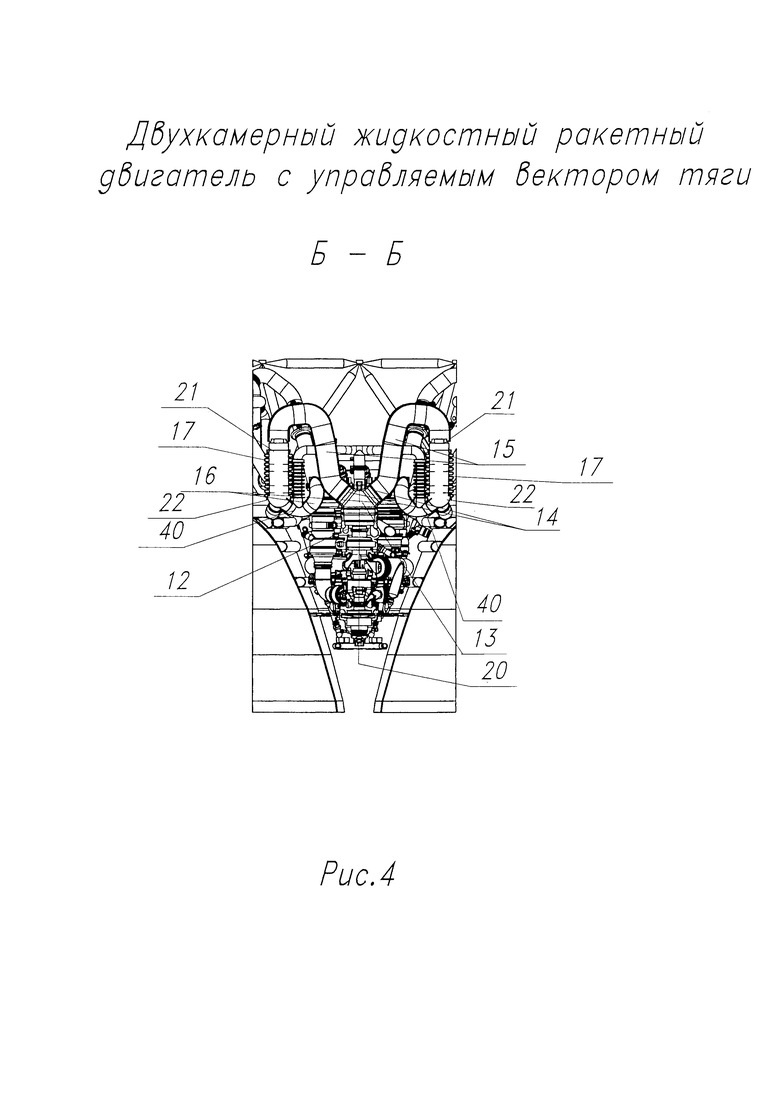
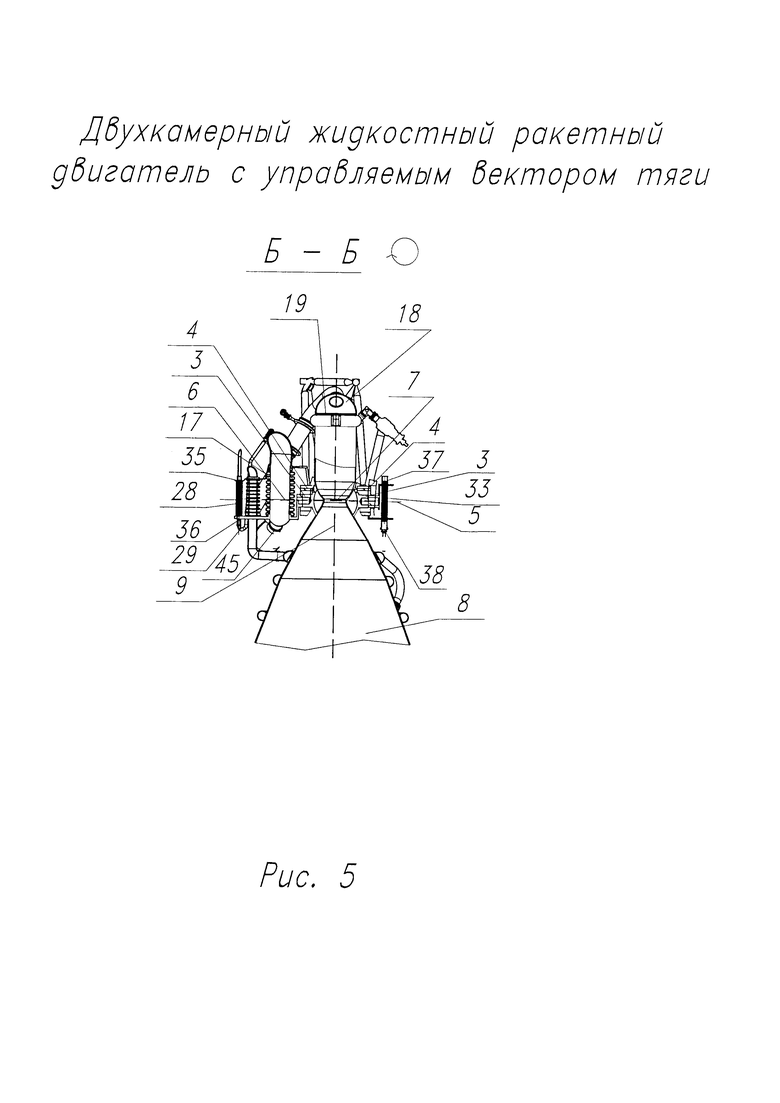
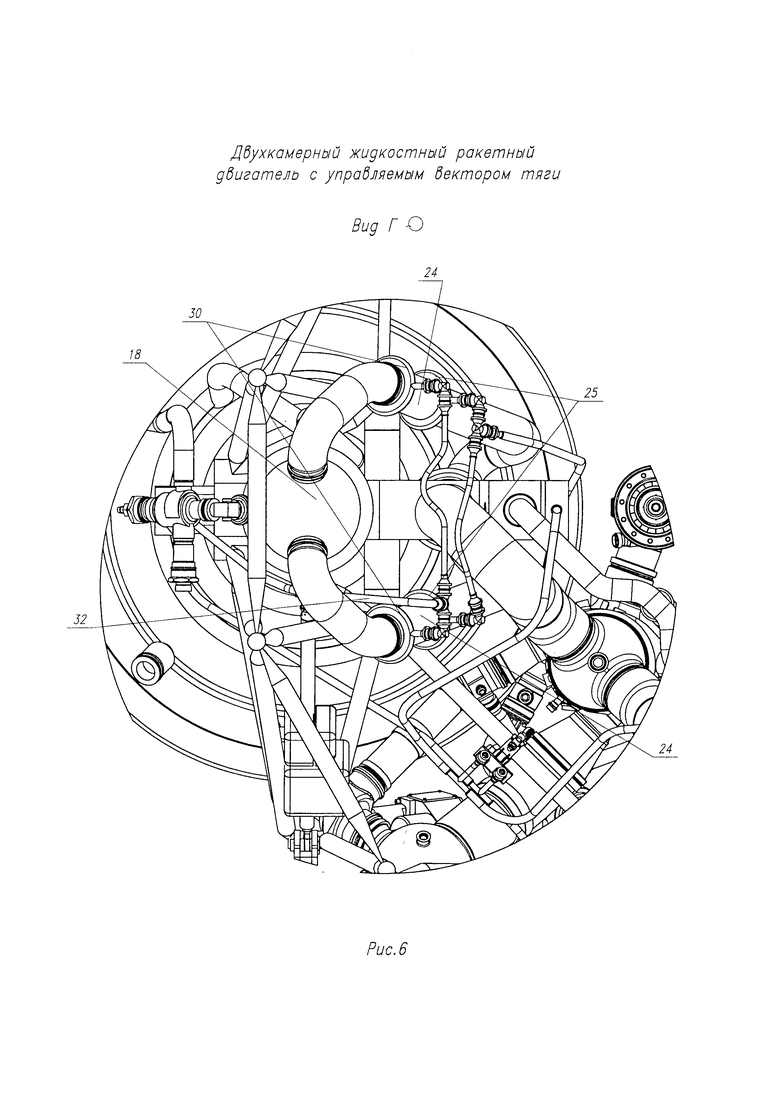
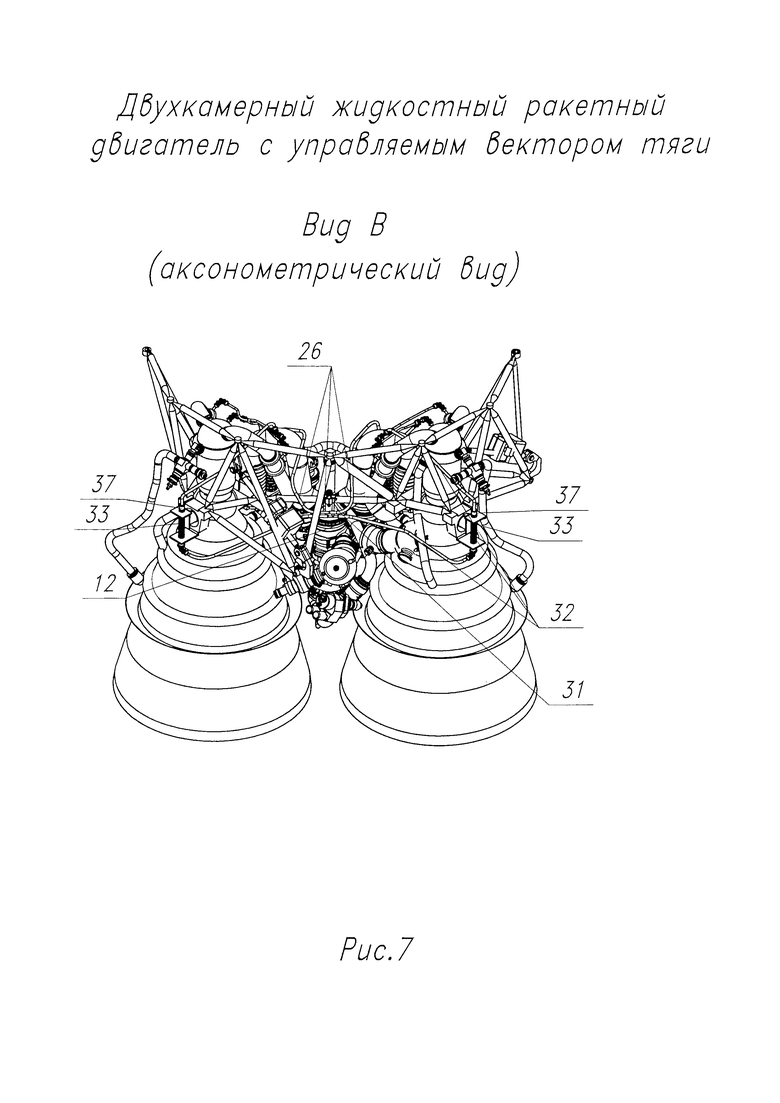
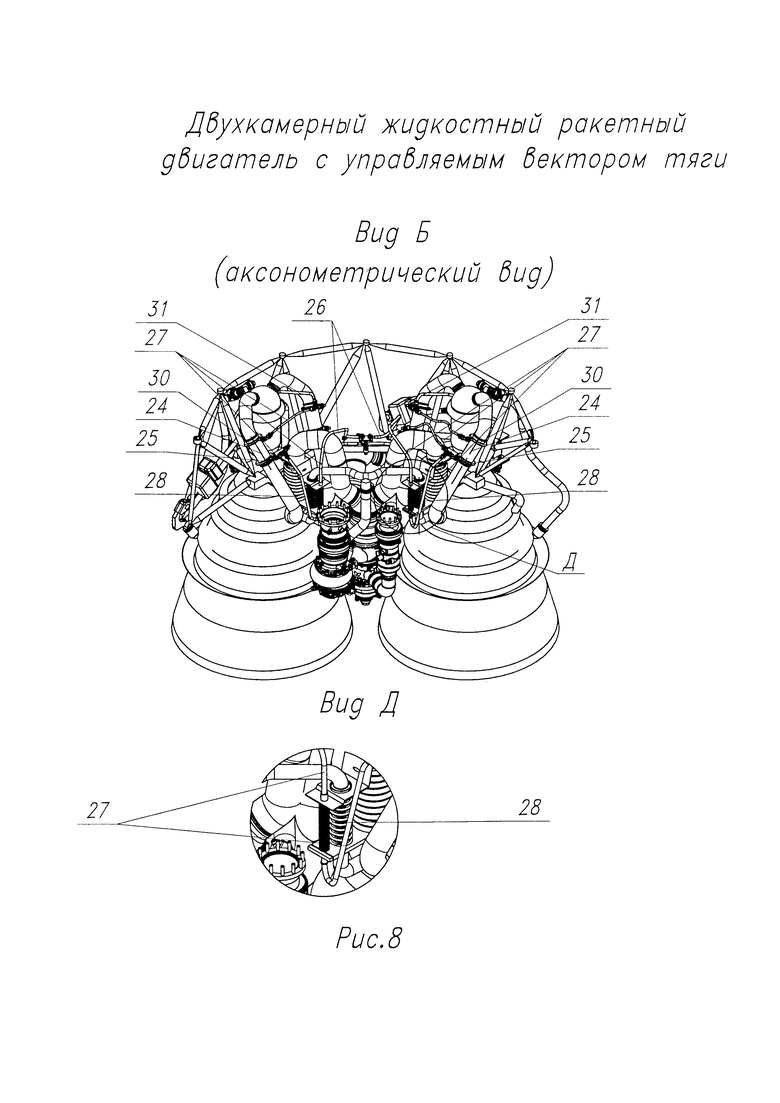
Предлагаемое изобретение представлено на рис. 1-11, где показаны следующие агрегаты:
1 Камера;
2 Плоскость качания камеры;
3 Цапфа;
4 Траверса;
5 Ось качания;
6 Плоскость минимального сечения сопла;
7 Минимальное сечение сопла;
8 Сопло камеры;
9 Ось симметрии камеры;
10 Продольная ось симметрии двигателя;
11 Турбонасосный агрегат;
12 Турбина турбонасосного агрегата;
13 Патрубок отвода генераторного газа от турбины;
14 Выход патрубка отвода генераторного газа;
15 Криволинейный жесткий патрубок;
16 Газовод;
17 Гибкий трубопровод;
18 Полостью подачи генераторного газа смесительной головки камеры;
19 Смесительная головка;
20 Продольная ось симметрии турбонасосного агрегата;
21 Вход гибкого трубопровода;
22 Выход гибкого трубопровода;
23 Криволинейный трубопровод;
24 Теплообменник;
25 Коллектор входа газа наддува теплообменника;
26 Магистраль подвода газа наддува;
27 Трубопровод;
28 Сильфон;
29 Продольная ось симметрии сильфона;
30 Коллектор выхода газа надува;
31 Магистраль отвода газа наддува;
32 Трубопровод;
33 Сильфон;
34 Продольная ось симметрии сильфона;
35 Вход сильфона;
36 Выход сильфона;
37 Вход сильфона;
38 Выход сильфона;
39 Первый криволинейный патрубок газовода;
40 Вход криволинейного патрубка газовода;
41 Прямолинейный патрубок газовода;
42 Вход прямолинейного патрубка;
43 Выход криволинейного патрубка газовода;
44 Второй криволинейный патрубок газовода;
45 Вход криволинейного патрубка газовода;
46 Выход прямолинейного патрубка газовода;
47 Выход второго криволинейного патрубка газовода;
48 Рама;
49 Втулка;
50 Втулка;
51 Стержень рамы;
52 Стержень рамы;
53 Заторцовка;
54 Заторцовка;
55 Выборка материала;
56 Выборка материала;
57 Высота втулки;
58 Привалочная плоскость двигателя;
59 Высота втулки;
60 Болт;
61 Шпангоут ракеты-носителя;
62 Плоскость симметрии.
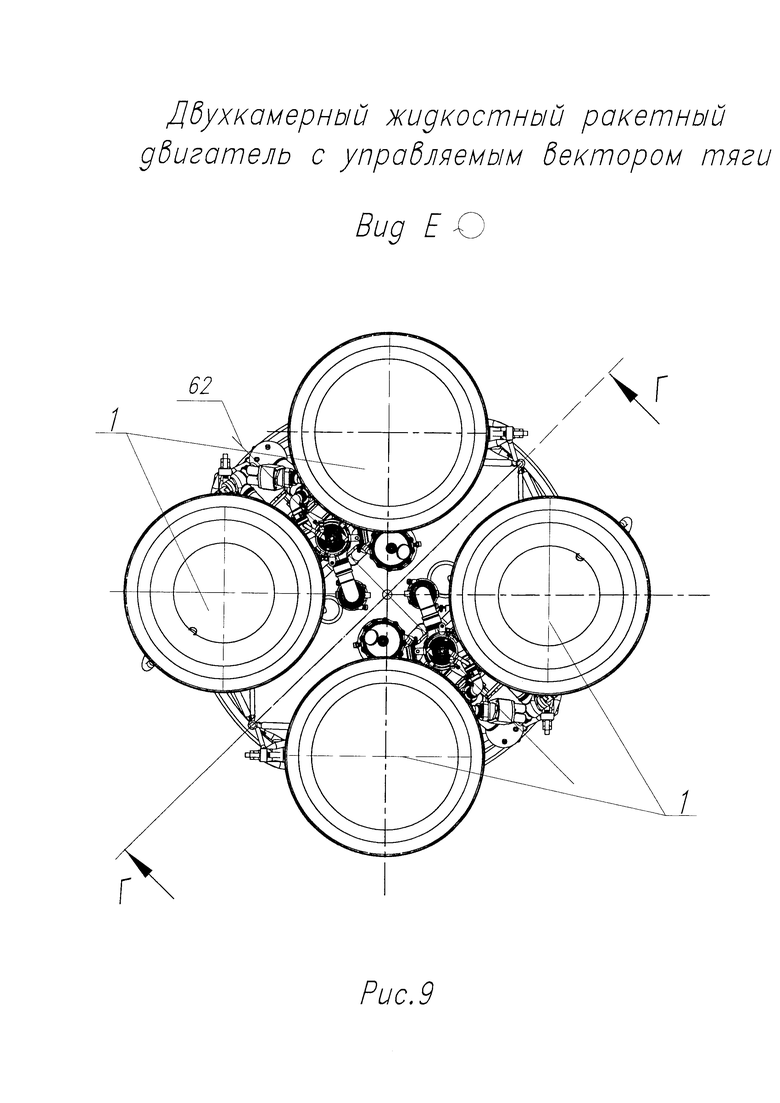
Двухкамерный жидкостный ракетный двигатель с управляемым вектором тяги с дожиганием генераторного газа содержит две камеры 1 с возможностью качания каждой в своей плоскости качания 2, цапфах 3 и траверсах 4 относительно осей качания 5, проходящих через плоскость 6 минимального сечения 7 сопла 8 камеры 1, перпендикулярной продольной оси симметрии 9 камеры 1. Расположенный вдоль продольной оси симметрии двигателя 10 общий для двух камер 1 турбонасосный агрегат 11 выполнен с турбиной 12 и патрубком отвода генераторного газа 13, соединенным выходом 14 с помощью последовательных на каждую камеру 1 криволинейного жесткого патрубка 15, газоводов 16, а в районе минимального сечения 7 сопла 8 гибкого трубопровода 17, перпендикулярного оси качания 5, с полостью подачи 18 генераторного газа смесительной головки 19. Турбонасосный агрегат 11 установлен своей продольной осью симметрии 20 вдоль продольной оси симметрии двигателя 10 и ориентирован турбиной 12 и патрубком отвода генераторного газа 13 в обратную от сопел 8 камер 1 сторону. Гибкий трубопровод 17 ориентирован и установлен входом 21 генераторного газа по направлению к смесительной головке 19 камеры 1, а выходом 22 по направлению к соплу 8 камеры 1. Патрубок отвода генераторного газа от турбины 13 соединен криволинейным трубопроводом 23 с входом 21 гибкого трубопровода 17 и выполнен минимальной длины за счет ориентации входа 21 в ту же сторону, что и патрубок отвода генераторного газа 13 турбины 12, так как в данном случае нет необходимости выполнение его зигзагообразной формы. В связи с этим сближение камер 1 и турбонасосного агрегата 11 в радиальном направлении при компоновке возможно на минимальные расстояния, ограничиваемые только размахом сопла 8 камеры 1 при его качании для управления вектором тяги двигателя. Расположение криволинейных жестких патрубков 15, газоводов 16 камер 1 не связано с ограничением радиальных габаритов двигателя, так как их выполнение возможно в аксиальном направлении, то есть в перпендикулярном от радиального направлении, что и приведено на рис. 2 и 3. На трубопроводах (газоводах) 16 генераторного газа установлены теплообменники 24 для нагрева газа наддува баков. Коллекторы входа газа наддува 25 теплообменников 24 соединены с магистралью подвода газа наддува 26 двигателя с помощью трубопроводов 27, содержащих сильфоны 28, перпендикулярные своими продольными осями 29 плоскости качания 2 камеры 1 и совпадающие поперечными осями с осью качания 5 камеры 1. Коллекторы выхода газа наддува 30 теплообменников 24 соединены с магистралью отвода газа наддува 31 двигателя с помощью трубопроводов 32, содержащих сильфоны 33, перпендикулярные своими продольными осями 34 плоскости качания 2 камеры 1 и совпадающие поперечными осями с осью качания 5 камеры 1. Входы 35 сильфонов 28 прикреплены неподвижно к траверсам 4, а выходы 36 сильфонов 28 прикреплены неподвижно к цапфам 3 камеры 1. Входы 37 сильфонов 33 прикреплены неподвижно к цапфам 3 камеры 1, а выходы 38 сильфонов 33 прикреплены неподвижно к траверсам 4, тем самым обеспечивая изгиб сильфонов 28 и 33 при качании камеры 1. Гибкий трубопровод 17 закреплен входом 21 генераторного газа за неподвижную траверсу 4 и ориентирован входом 21 по направлению к смесительной головке 19 камеры 1, а выходом 22 генераторного газа закреплен за цапфы 3 камеры 1 и выходом 22 ориентирован в обратном от смесительной головки 19 камеры 1 направлении. К выходу 22 гибкого трубопровода 17 прикреплены газоводы 16, представляющие собой первые криволинейные патрубки 39, примыкающие непосредственно своими входами 40 к выходу гибкого трубопровода 22. Прямолинейные патрубки 41 входами 42 соединены с выходами 43 первых криволинейных патрубков 39. На прямолинейных патрубках 41 установлены теплообменники 24. Вторые криволинейные патрубки 46 соединены своими входами 45 с выходами 46 прямолинейных патрубков 41. Выходы 47 вторых криволинейных патрубков 44 соединены со смесительной головкой 19 камеры 1. За счет парного симметричного выполнения газоводов 16 удается сократить радиальные габариты в каком-то одном радиальном направлении от оси симметрии 9 камеры 1, обеспечив установку двух теплообменников 24 на каждой камере 1. Турбонасосный агрегат 11 установлен неподвижно вдоль оси симметрии двигателя 10 и связан с траверсами 4 и общей рамой 48, предназначенной для передачи силы тяги от камер 1 через траверсы 4 на шпангоут 61 ракеты-носителя. Плоскость симметрии 62 между камерами 1 двухкамерного двигателя является геометрическим местом расположения продольной оси симметрии 20 турбонасосного агрегата 11 при его перемещении в процессе компоновки с целью достижения минимальных потерь давления в криволинейных жестких патрубках 15 и минимальной их массы за счет возможности выполнения криволинейных жестких патрубков 15 только с однократным изгибом за счет ориентации в одну сторону (в сторону смесительной головки 19 камеры) как патрубка отвода генераторного газа 13 от турбины 12 турбонасосного агрегата 11, так и входа 21 гибкого трубопровода 17.
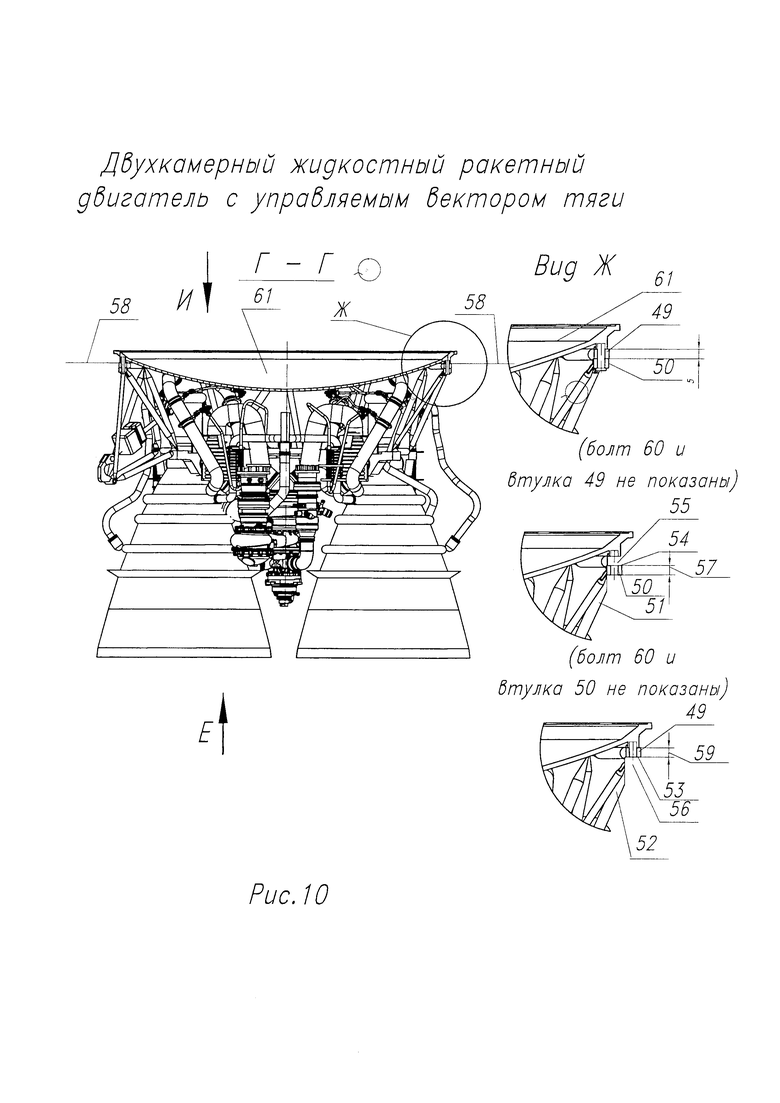
Для обеспечения унификации рамы 48, предназначенной для каждого из стыкуемых двух одинаковых двухкамерных жидкостных ракетных двигателей, входящих в четырехкамерную двигательную установку, крайние втулки 49 и 50 опорных узлов стержней 51 и 52 рамы 48 выполнены одинаковой высоты полыми с заторцовками 53 и 54 и выборками 55 и 56 металла вдоль продольной оси симметрии двигателя: у втулки 49, расположенной с одной стороны рамы 48 каждого двухкамерного двигателя, заторцовка 53 выполнена на половину высоты 57 втулки 50 в сторону привалочной плоскости 58; у крайней втулки 50, расположенной с другой стороны рамы 50, заторцовка 54 выполнена на половину высоты 59 втулки 49 начиная от верхней части втулки в сторону сопла 8 камеры 1. Две однотипные рамы 48 двухкамерных жидкостных ракетных двигателей, собираемые в одну общую раму связки четырехкамерных двигателей, собраны таким образом, что часть втулки 49 соосно смонтирована с втулкой 50, занимая место в последней, освобожденное заторцовкой 54, а часть втулки 50 соосно смонтирована с втулкой 49, занимая место в последней, освобожденное заторцовкой 53. Соосные втулки 49 и 50 рам 48 каждого из двух двухкамерных жидкостных ракетных двигателей скреплены болтами 60 друг с другом и с шпангоутом 61 ракеты-носителя.
При таком расположении в двухкамерном жидкостном ракетном двигателе с управляемым вектором тяги входов 21 и выходов 22 гибких трубопроводов 17 подвода генераторного газа 17 по отношению к смесительной головке 19 камеры 1, а именно: входом 21 - к смесительной головке 19, выходом 22 - в обратную от смесительной головки 19 сторону, и при расположении выхода турбонасосного агрегата 11 и входов 21 гибких трубопроводов 17 криволинейных жестких патрубков 15 и патрубка отвода генераторного газа 13 в одну сторону (в сторону смесительной головки) обеспечиваются минимальные радиальные размеры жидкостного ракетного двигателя.
Двухкамерный жидкостный ракетный двигатель с управляемым вектором тяги работает следующим образом.
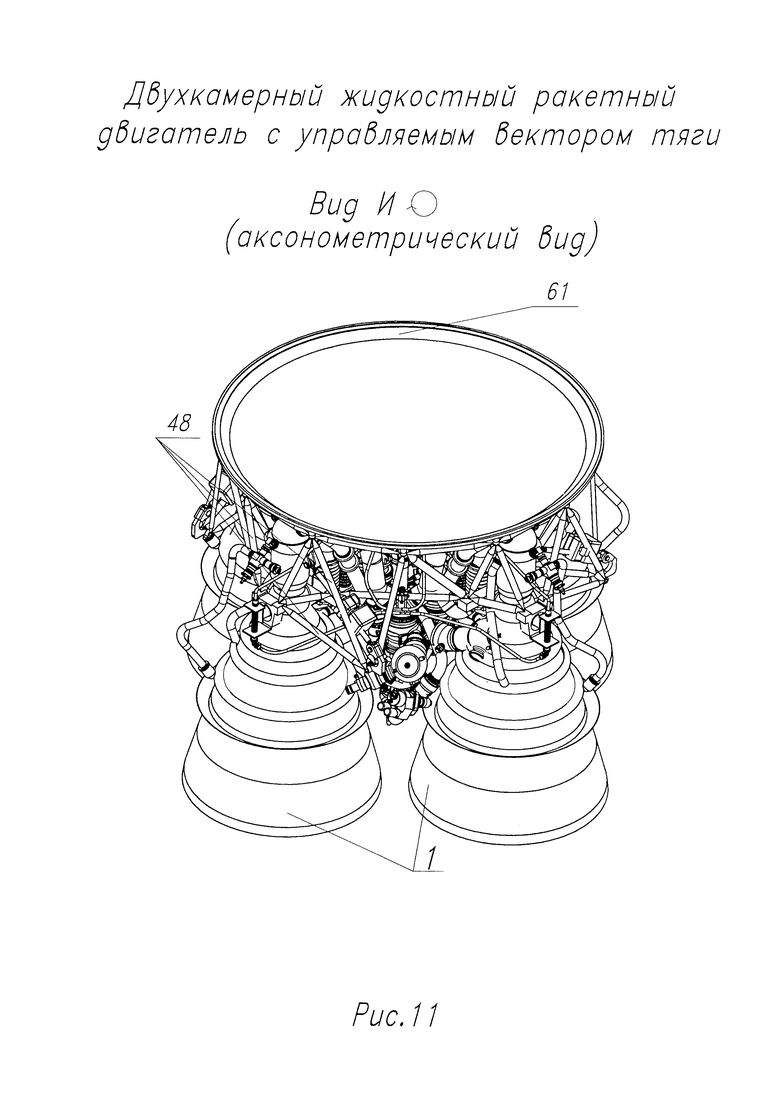
При запуске и работе на режиме генераторный газ после турбины 12 турбонасосного агрегата 11 поступает в патрубок отвода генераторного газа 13, далее от выхода патрубка отвода генераторного газа 14 поступает в криволинейный трубопровод 23, совершая в нем только один поворот до поступления в гибкий трубопровод 17. Далее генераторный газ поступает на вход 21 гибкого трубопровода 17 со стороны, ориентированной в сторону смесительной головки 19 камеры 1, и далее через гибкий трубопровод 17 на его выход 22, где разветвляется на два параллельных потока, поступая через газоводы 16 в полость смесительной головки 19 камеры. При поступлении высокотемпературного генераторного газа через прямолинейный патрубок газовода 41 происходит теплоотдача от генераторного газа к газу, предназначенному для наддува топливных баков, в теплообменнике 24. Далее генераторный газ поступает через второй криволинейный патрубок газовода 44 в полость смесительной головки 19 камеры 1. Сила тяги камеры 1 передается через цапфы 3 на траверсы 4 и далее на раму 48, а от нее на шпангоут ракеты-носителя 61. При качании камеры в плоскости 2 происходит управление вектором тяги. За счет минимальных радиальных габаритов размещения камер 1 в двухкамерном двигателе качание камер 1 возможно на увеличенные углы, обеспечивая заданную маневренность и управляемость ракеты-носителя. Но более эффективным сказывается использование запаса по радиальным габаритам для увеличения тяги двух камер в пределах радиальных размеров располагаемого двигательного отсека с использованием турбонасосного агрегата 11, предназначенного для работы четырех камер четырехкамерного двигателя, а также для увеличения диаметра среза сопла 8, обеспечив увеличение степени расширения сопла 8 и повышение экономичности двигателя с последующей комплектацией четырехкамерной двигательной установки этими двухкамерными двигателями. В четырехкамерном двигателе, укомплектованном двумя двухкамерными двигателями (рис. 9-11), качание в процессе работы четырех камер 1, каждой в своей плоскости качания 2, обеспечивает управление вектором тяги по тангажу, рысканию и крену.
Такой двухкамерный жидкостный ракетный двигатель с управляемым вектором тяги позволяет с использованием траверс и качанием камер только в одной плоскости качания 2 создавать на его основе четырехкамерные двигательные установки, позволив при этом обеспечить управление вектором тяги по крену, тангажу и рысканию с обеспечением минимальных радиальных габаритов, что является существенным при форсировании двухкамерного жидкостного ракетного двигателя в прежних габаритах двигательного отсека.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ | 2022 |
|
RU2784462C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2707015C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ ГЕНЕРАТОРНОГО ГАЗА | 2012 |
|
RU2490508C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2709243C1 |
| ГАЗОВЫЙ ТРАКТ ЖРД | 2015 |
|
RU2579296C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2020 |
|
RU2739660C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2725345C1 |
| ЖИДКОСТНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2014 |
|
RU2563596C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2024 |
|
RU2836284C1 |
| ГАЗОВОД ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ | 2005 |
|
RU2339831C2 |
Изобретение относится к ракетной технике. В двухкамерном жидкостном ракетном двигателе с управляемым вектором тяги, содержащем две камеры с возможностью качания каждой в своей плоскости стабилизации в цапфах и траверсах относительно оси качания, проходящей через плоскость минимального сечения сопла камеры, перпендикулярной продольной оси двигателя, и расположенный вдоль продольной оси двигателя общий для двух камер турбонасосный агрегат с турбиной и патрубком отвода генераторного газа, соединенный выходом с помощью последовательных на каждую камеру криволинейного жесткого патрубка, газоводов, а в районе минимального сечения сопла - гибкого трубопровода, перпендикулярного оси качания, с полостью смесительной головки, и установленные на трубопроводах генераторного газа теплообменники для нагрева газа наддува баков, гибкий трубопровод ориентирован и установлен входом генераторного газа по направлению к смесительной головке камеры, а выходной частью, соединенной газоводом со смесительной головкой, в обратном от смесительной головки камеры направлении, причем теплообменники установлены на газоводах на участках от гибкого трубопровода до смесительной головки камеры. Изобретение обеспечивает уменьшение радиальных габаритов жидкостного ракетного двигателя, уплотнение компоновки двигателя в радиальном направлении и за счет этого уменьшение массы двигателя. 11 ил.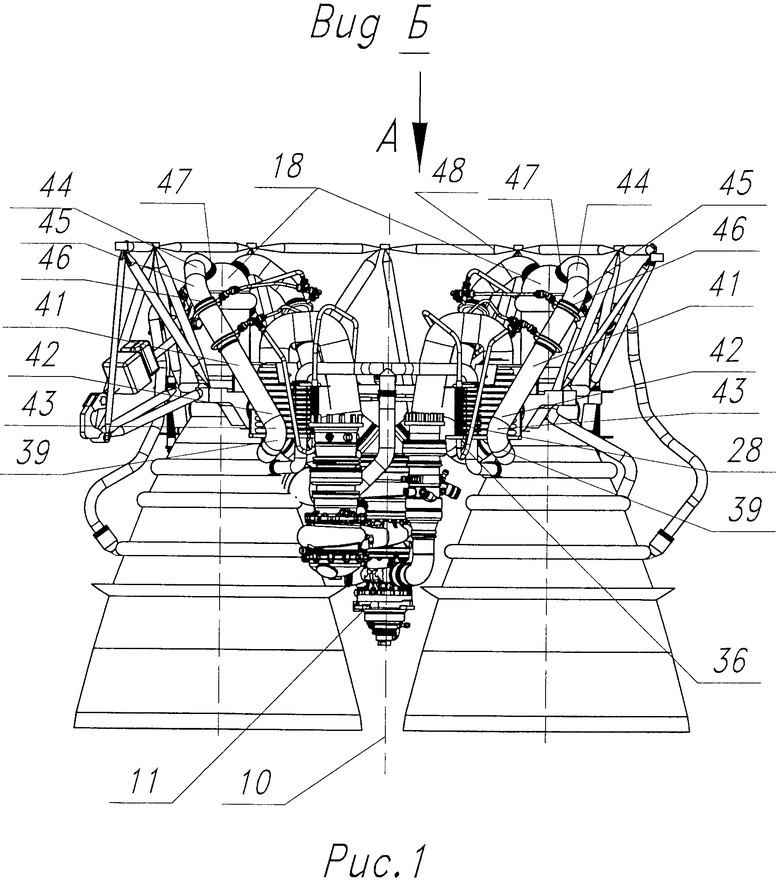
Двухкамерный жидкостный ракетный двигатель с управляемым вектором тяги, содержащий две камеры с возможностью качания каждой в своей плоскости стабилизации в цапфах и траверсах относительно оси качания, проходящей через плоскость минимального сечения сопла камеры, перпендикулярной продольной оси двигателя, и расположенный вдоль продольной оси двигателя общий для двух камер турбонасосный агрегат с турбиной и патрубком отвода генераторного газа, соединенный выходом с помощью последовательных на каждую камеру криволинейного жесткого патрубка, газоводов, а в районе минимального сечения сопла - гибкого трубопровода, перпендикулярного оси качания, с полостью смесительной головки, и установленные на трубопроводах генераторного газа теплообменники для нагрева газа наддува баков, отличающийся тем, что гибкий трубопровод ориентирован и установлен входом генераторного газа по направлению к смесительной головке камеры, а выходной частью, соединенной газоводом со смесительной головкой, в обратном от смесительной головки камеры направлении, причем теплообменники установлены на газоводах на участках от гибкого трубопровода до смесительной головки камеры.
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2158838C2 |
| Способ лечения травм спинного мозга | 1982 |
|
SU1326277A1 |
| US 6170258 B2, 09.01.2001. | |||

