Изобретение относится к ракетной технике и может быть использовано при изготовлении ракетных установок с жидкостным ракетным двигателем.
В ракетной технике известны и нашли широкое распространение мощные жидкостные ракетные двигатели для применения в ракетоносителях разнообразного назначения.
Известен жидкостный ракетный двигатель (ЖРД) с условным обозначением РД-253 конструкции НПО Энергомаш (Энциклопедия "Космонавтика", гл. ред. В.П. Глушко, М., 1985, стр. 330-331). Этот ЖРД имеет камеру, газогенератор, турбонасосный агрегат, агрегаты автоматики, магистральные трубопроводы, гидравлически связывающие между собой агрегаты двигателя, газовый трубопровод, соединяющий турбину турбонасосного агрегата с камерой, узлы крепления ЖРД к ракетоносителю, обеспечивающие возможность поворота (качания) его в вертикальной плоскости.
Недостаток этого технического решения заключается в том, что конструкция известного ЖРД может обеспечивать его поворот (качание) для изменения направления вектора тяги только в одной плоскости. Следует также отметить значительные габариты входящих в известную конструкцию сильфонных компенсаторов, что приводит к повышенному осевому габариту двигателя.
Этот недостаток известного устройства присутствует и в конструкции двухкамерного ЖРД, который также обладает значительным осевым габаритом. Указанные недостатки препятствуют изготовлению ракетоносителя с уменьшенными массой и габаритами.
Известен также ЖРД F-1 конструкции фирмы США Рокетдайн (ЦИАМ, "Иностранные авиационные и ракетные двигатели", 1971, стр. 436-439.) Этот ЖРД имеет камеру сгорания, газогенератор, турбонасосный агрегат, агрегаты автоматики, внутренние магистральные трубопроводы двигателя, узел карданного подвеса двигателя.
Применительно к двухкамерной конструкции двигателя известный ЖРД требует создания специальной рамы. Для него в ряде случаев также сложно обеспечить уменьшенные осевые габариты двигателя и, следовательно, оптимизировать ракетоноситель по габаритам и массе.
Наиболее близким для предложенного жидкостного ракетного двигателя является ЖРД под условным обозначением РД-219 конструкции НПО Энергомаш (Энциклопедия "Космонавтика", гл. ред. В.П. Глушко, М., 1985, с. 330). Известный жидкостный ракетный двигатель включает две камеры, закрепленные на раме, прикрепленный к раме турбонасосный агрегат, имеющий турбину, насосы окислителя и горючего, трубопроводы подвода окислителя и горючего в газогенератор и камеры двигателя.
Ограничение известного технического решения состоит в том, что камеры двигателя выполнены жестко закрепленными на раме. Они не могут поворачиваться, изменяя направление вектора тяги, и в ряде случаев требуют применения специальных рулевых камер на ракетоносителе. Кроме того, этот двигатель не имеет трубопровода между турбиной и камерами и выполнен с выхлопом за борт газогенераторного газа, что не может обеспечить повышенной удельной тяги ракетного двигателя, характерной для схемы с дожиганием газогенераторного газа. Если этот двигатель выполнить с "качающимися" камерами и по схеме с дожиганием, то возрастут осевой и диаметральный габариты конструкции.
В основу настоящего изобретения положена задача создания конструкции ЖРД, которая обеспечивает уменьшение осевого габарита двигателя, а также осевого габарита и массы ракетоносителя. Другой задачей является улучшение использования пространства двигательного отсека ракеты заполняющими его частями и агрегатами ЖРД и упрощение процесса сборки двигателя.
Необходимость уплотнения компоновки становится особенно актуальной в случаях, при которых необходимо модернизировать старые ракетоносители за счет установки на них более совершенных современных ракетных двигателей.
Сущность изобретения заключается в том, что в известном жидкостном ракетном двигателе, включающем две камеры, закрепленные на раме, прикрепленный к раме турбонасосный агрегат, имеющий турбину, насосы окислителя и горючего, трубопроводы подачи окислителя и горючего в газогенератор и камеры двигателя, рама выполнена разборной и содержит по меньшей мере две секции, указанная рама снабжена опорами для восприятия усилий от двигателя и пятами для крепления рамы к корпусу ракеты, причем пяты и опоры расположены в плоскостях, перпендикулярных продольной оси двигателя, при этом плоскость расположения пят находится между плоскостью расположения опор и корпусом ракеты, а каждый из трубопроводов подачи горючего к камерам содержит два сильфонных компенсатора.
Кроме того, компенсаторы выполнены с возможностью компенсации угловых перемещений трубопроводов подачи горючего к камерам во взаимно перпендикулярных плоскостях, параллельных оси жидкостного ракетного двигателя.
Кроме того, секции рамы выполнены из стержней, соединенных сваркой, и скреплены между собой через плоское стержневое сочленение.
Кроме того, плоское стержневое сочленение имеет форму крестовины, а в качестве стержней используют трубчатые стержни.
Возможен также вариант реализации изобретения, в котором дополнительно введен раздвоенный изогнутый трубопровод, единый концевой участок которого соединен с выходом турбины, а два колена соединены с соответствующими камерами через сильфонные компенсаторы, каждый из которых снабжен карданным механизмом, являющимся узлом качания камеры.
Кроме того, раздвоенный изогнутый трубопровод прикреплен к раме посредством узлов крепления, установленных на его коленах.
Кроме того, узел крепления включает две цапфы, вставленные в подшипниковые узлы опор для восприятия усилий от двигателя. Жидкостный ракетный двигатель по п. 1, 5, 7, отличающийся тем, что опора для восприятия усилий от двигателя выполнена на раме в виде траверсы.
Кроме того, подшипниковый узел выполнен в виде сферического подшипника скольжения.
Как следует из вышеизложенного, ЖРД содержит две камеры, газогенератор, турбонасосный агрегат, магистральные трубопроводы двигателя, сообщающие между собой соответствующие агрегаты двигателя. ЖРД имеет раму, содержащую пяты и опоры, расположенные в разных перпендикулярных оси двигателя плоскостях и составленную не менее чем из двух сварных стержневых секций, скрепленных между собой через плоское стержневое сочленение. Во внутренних магистральных трубопроводах ЖРД, подводящих к камерам двигателя, установлены сильфонные компенсаторы или гибкие рукава, подвижными концами соединенные непосредственно с камерами или состыкованными с ними трубопроводами. Под подвижными концами здесь понимаются те концы компенсаторов или гибких рукавов, которые перемещаются вместе с камерами при их качании относительно корпуса ракеты.
Рама имеет пяты и опоры, расположенные в разных перпендикулярных оси двигателя плоскостях. Рама выполнена в виде рамы сжатия за счет размещения плоскости пят между плоскостью опор и корпусом ракеты. Важным обстоятельством является то, что рама выполнена разборной, например, за счет скрепления секций рамы и плоского стержневого сочленения с помощью резьбовых соединений.
Вследствие такой конструкции в процессе сборки двигателя части рамы могут временно отстыковываться или крепиться на раме после установки на двигатель некоторых других соответствующих агрегатов и деталей, что упрощает процесс сборки двигателя.
В варианте реализации изобретения для ЖРД, выполненного по схеме с дожиганием генераторного газа, между турбиной турбонасосного агрегата и камерами расположен сообщающие их внутренние полости раздвоенный трубопровод. Раздвоенные выходные концы трубопровода - его колена соединены каждый со своим сильфонным компенсатором, снабженным карданным шарниром и закрепленным на раме, а на входном конце едином раздвоенного трубопровода герметично закреплен турбонасосный агрегат.
Такая конструкция обеспечивает возможность снижения массы рамы и благоприятно сказывается на оптимизации массы и осевого габарита двигателя.
ЖРД, в соответствии с настоящим изобретением, кроме раздвоенного трубопровода имеет другие соединяемые с камерой трубопроводы, каждый из которых содержит по два последовательно расположенных в магистрали сильфонных компенсатора. Каждый из таких сильфонных компенсаторов выполнен компенсирующим перемещение концов трубопровода в своей плоскости. Эти плоскости для каждого трубопровода взаимно перпендикулярны между собой и простираются вдоль оси ЖРД. Такое конструктивное исполнение соединенных с камерами трубопроводов дает возможность обеспечить поворот (качание) практически только одних камер относительно ракетоносителя, сохраняя неподвижное положение турбонасосного агрегата, газогенератора, рамы и других агрегатов и частей ЖРД. Это позволяет снизить "качающиеся" инерционные массы двигателя, т.е. снизить массу и мощность рулевых машин и массу двигателя в целом.
В одном из вариантов реализации изобретения плоское стержневое сочленение рамы может быть выполнено в виде крестовины из трубчатых металлических сваренных между собой стержней. Это дает возможность обеспечить пониженную высоту рамы, т. е. обеспечить снижение массы и габаритов конструкции хвостового отсека ракеты в целом для требуемых конструктивных особенностей двигателя.
Далее изобретение описывается на примере его конкретного осуществления со ссылками на чертежи.
На фиг. 1 представлен общий вид ЖРД;
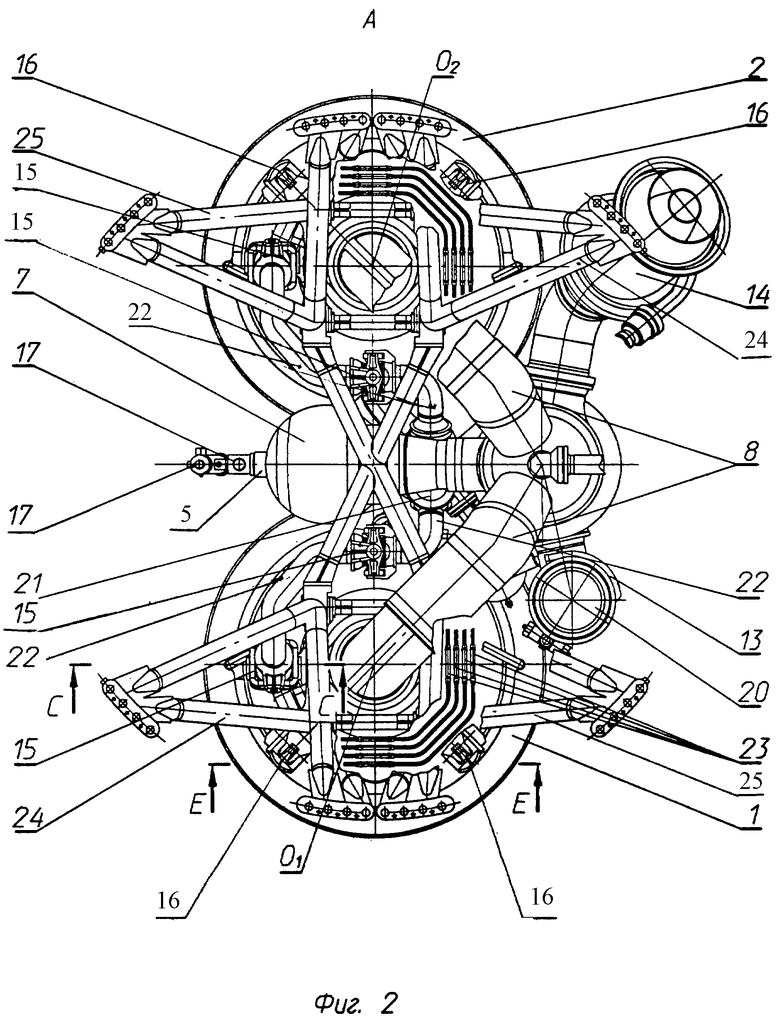
на фиг. 2 - вид A на фиг. 1, развернутый на 90o против часовой стрелки;
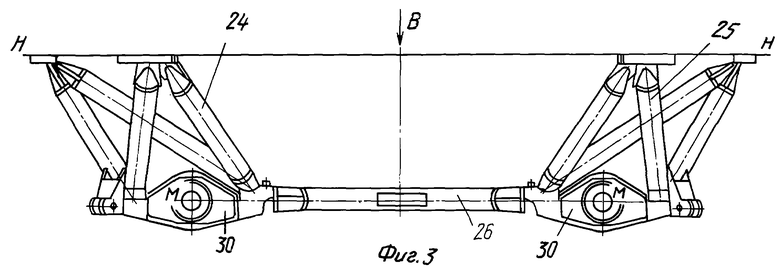
на фиг. 3 - рама ЖРД;
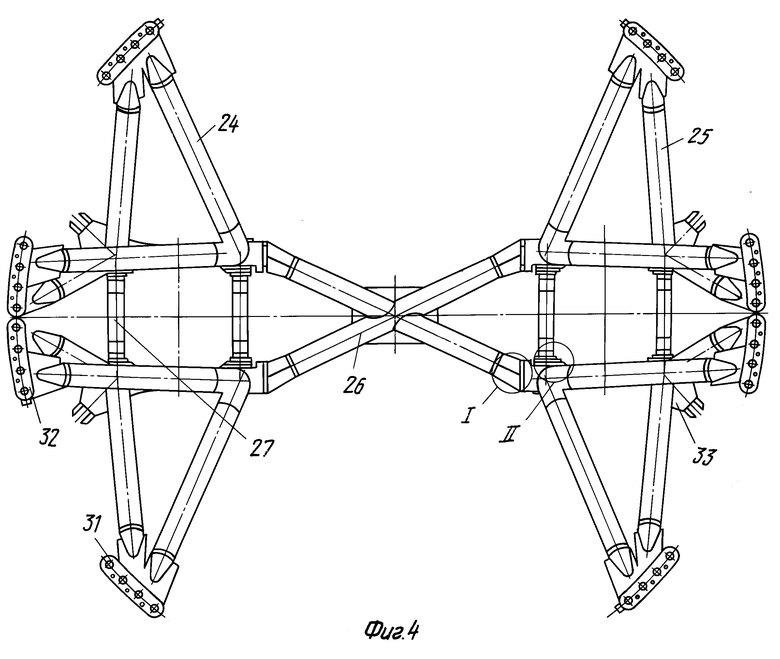
на фиг. 4 - вид B (см. фиг. 3) на раму ЖРД;
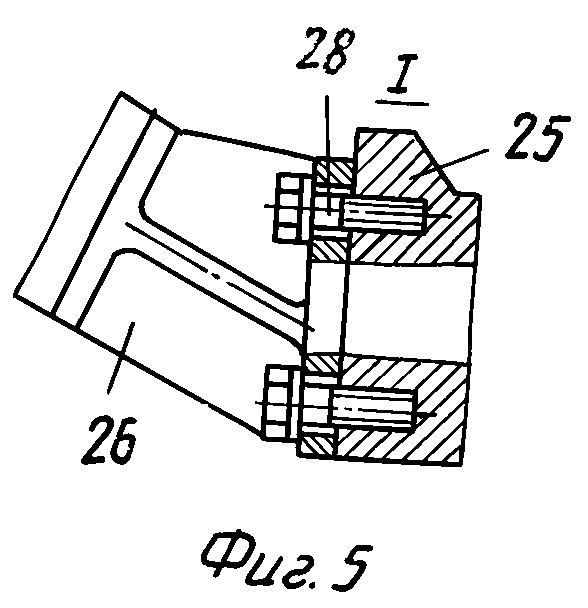
на фиг. 5 - место I (см. фиг. 4) разъемного соединения секции рамы с крестовиной;
на фиг. 6 - место II (см. фиг. 4) разъемного соединения секции рамы с проставкой;
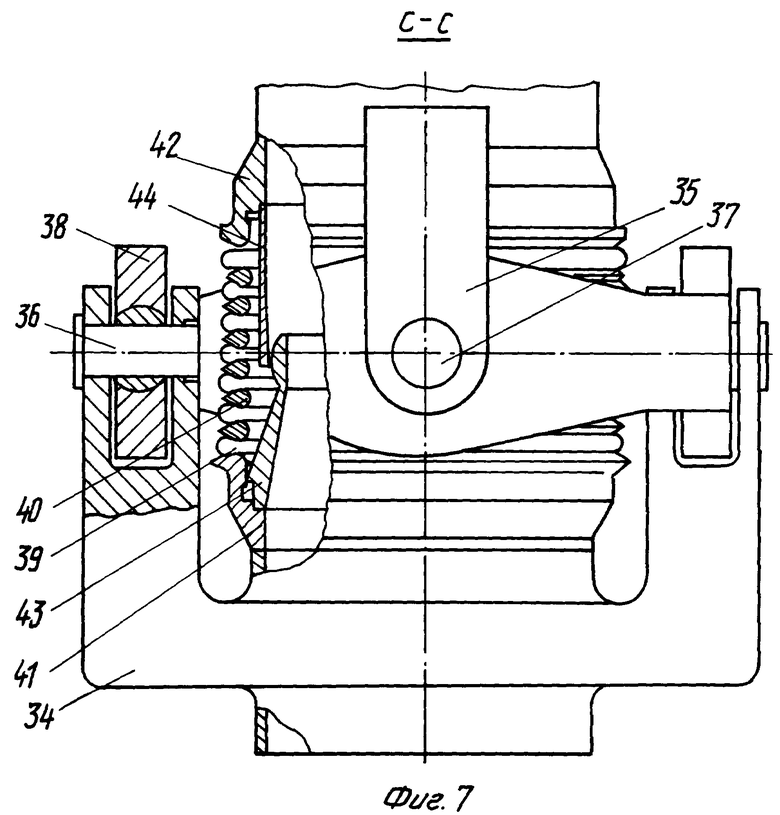
на фиг. 7 - сильфонный компенсатор с разрезом по сечению C-C на фиг. 2;
на фиг. 8 - гибкий металлический рукав трубопроводов газа высокого давления (для управления и продувки) с разрезом по сечению Е-Е на фиг. 2;
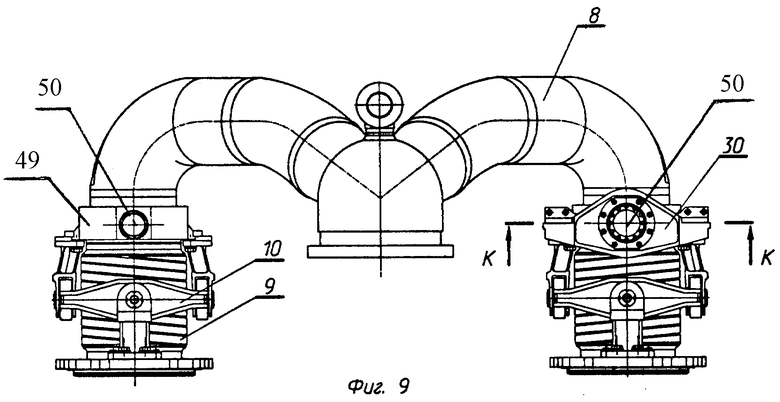
на фиг. 9 - раздвоенный изогнутый трубопровод высокотемпературного окислительного газа с шарнирным креплением на раме и с карданным сильфонным компенсатором;
на фиг. 10 - сечение К-К на фиг. 9 шарнирного крепления трубопровода на раме.
Предложенный ЖРД представлен на фиг. 1 и 2, где 1 - первая камера ЖРД; 2 - вторая камера ЖРД. Камеры 1 и 2 конструктивно выполнены одинаковыми, 3 - турбонасосный агрегат, содержащий насос горючего 4, насос окислителя 5 и турбину 6. Вход турбины 6 гидравлически сообщается с газогенератором 7 (фиг. 2), а выход турбины 6 соединен с камерами 1 и 2 посредством раздвоенного изогнутого трубопровода 8 высокотемпературного окислительного газа (фиг. 1, 2). На выходах из этого трубопровода 8 установлены сильфонные компенсаторы 9 (фиг. 1) по одному для каждой камеры 1, 2 со своими карданными механизмами 10. Центр карданного механизма 10 для камеры 1 расположен в точке O1, а центр карданного механизма для камеры 2 находится в точке O2 (фиг. 1 и 2).
Двигатель имеет основной трубопровод 11 подвода горючего (фиг. 1), соединенный одним концом с бустерным насосным агрегатом горючего 13 (фиг. 2), а другим со входом насоса горючего 4, и трубопровод 12 подвода окислителя (фиг. 1), соединенный одним концом с бустерным насосным агрегатом окислителя 14 (фиг. 1), а другим со входом насоса окислителя 5.
Выход насоса горючего 4 через управляемый дроссель горючего 21 и трубопроводы 22, в каждом из которых установлено по два сильфонных компенсатора 15, подключен к пускоотсечным клапанам горючего 19, установленным соответственно на камерах 1, 2. Причем сильфонные компенсаторы 15 расположены в плоскости качания камер 1, 2, а их оси ортогональны друг другу и расположены вдоль осей качания камер.
Каждая из камер 1 и 2 имеет по два рулевых гидропривода 16 (фиг. 1, 2), шток каждого из которых шарнирно связан с соответствующими камерами 1 или 2. Гидроприводы 16 обеспечивают угловой поворот камер 1 и 2 вокруг осей, проходящих через центры карданов 10, O1 и О2 соответственно каждого в своей плоскости. Плоскости, в которых может осуществляться поворот камер 1 и 2 от гидроприводов 16, взаимно перпендикулярны. Максимальное отклонение оси камеры 1 или 2 от номинального положения может составлять до 8o. Так как двигатель предназначен для несамовоспламеняющихся компонентов топлива, то он имеет две ампулы 17 пускового горючего.
Двигатель снабжен агрегатами автоматики: отсечным клапаном 18 окислителя, установленным на входе в газогенератор 7, а также двумя отсечными клапанами 19 горючего, установленными на камерах 1 и 2 (фиг. 1).
Кроме того, устройство (фиг. 2) имеет разделительный клапан 20 горючего, установленный в трубопроводе 11 подвода горючего к насосу горючего 13.
Для продувки двигателя и управления клапанами двигатель содержит трубопроводы с гибкими металлическими рукавами 23 (фиг. 2).
Двигатель содержит также агрегаты автоматики. Во многих случаях целесообразно наличие регуляторов расхода. Схема управления двигателем может быть различной и зависит, в частности, от используемых компонентов топлива и технических требований, предъявляемых к двигателю.
Нижние основания сильфонных компенсаторов 9 (фиг. 1) закреплены на камерах 1 и 2, а верхние основания закреплены на раздвоенном трубопроводе, который шарнирно закреплен на раме.
Рама предназначена для неподвижного крепления двигателя к корпусу ракеты и передачи силы тяги на корпус ракеты. Рама состоит из двух зеркально симметричных секций 24 и 25, каждая из которых состоит из двух зеркально симметричных частей - четвертей рамы.
Рама имеет крестовину 26 и четыре проставки 27. Четверти рамы выполнены сварными. В каждой секции 24 и 25 четверти рамы разъемно скреплены через проставки 27 и крестовину 26. Крестовина 26 разъемно скрепляет между собой и сами секции 24 и 25. Разъемные соединения в раме между секциями рамы и крестовиной 26 показаны на фиг. 5.
Скрепление частей обеспечивается с помощью шайб и болтов 28. Скрепление четвертей рамы в секции 24 и 25 через проставки осуществляется с помощью гаек, шайб и болтов 29, как показано на фиг. 6.
Разъемная конструкция рамы обеспечивает возможность установки на двигателе отдельных ее элементов после монтажа, в том числе с частично собранной рамой, других сборочных единиц и элементов ЖРД, в частности расположенных во внутреннем пространстве рамы, недоступном для некоторых сборочных операций при полностью собранной раме.
Плоскость пят 31 и 32 проходит через стыкуемую с корпусом ракеты плоскость, обозначенную на фиг. 1 и фиг. 3 как Н-Н. Место крепления раздвоенного трубопровода 8 определяется отверстиями в траверсах 30 рамы (фиг. 3). Положение этих отверстий определяет положение плоскости опор, которая условно характеризуется плоскостью, проходящей через центры этих отверстий и параллельной плоскости пят 31 и 32. Эта плоскость на фиг. 1 и фиг. 3 обозначена, как М-М. Плоскость пят лежит над плоскостью опор, и рама является рамой сжатия.
Рама имеет также четыре кронштейна 33 (фиг. 4), на которых крепятся рулевые приводы 16 (фиг. 2).
Для ужесточения конструкции рамы вместо крестовины 26 может быть использован сваренный из труб прямоугольный четырехугольник, например, с диагональю.
На магистралях 22 подвода горючего к камерам стоят по два сильфонных компенсатора 15 (фиг. 2). Эти компенсаторы аналогичны по конструкции сильфонным компенсаторам 9 (фиг. 1) подвода окислительного газа к камерам 1 и 2.
Разрез сильфонного компенсатора горючего 15 со своим карданным механизмом представлен на фиг. 7 (сечение C-C на фиг. 2), где 34 и 35 - вилки карданного механизма, 36 и 37 - оси карданного механизма, 38 - карданная рама, 39 - сильфон, 40 - бронирующие кольца, вставленные в выемки гофров сильфона 39, 41 и 42 - основания, герметично сваренные с концами сильфона 39; 43 и 44 - спрямляющие поток патрубки, закрепленные в основаниях 41 и 42 соответственно.
На магистралях управления агрегатами автоматики с клапанами 18, 19 (фиг. 1), а также на магистралях продувок полости камер 1, 2 газогенератора 7 установлены гибкие металлические рукава 23 (фиг. 2), показанные на фиг. 8. Каждый такой гибкий рукав 23 состоит из сильфонной трубки 45, упрочняющей обмотки 46, выполненной из проволоки, металлической оплетки 47 и двух опорных втулок 48. На каждой магистрали установлено по два таких шланга. Управляющий и продувочный газ может поступать из баллонов высокого давления, установленных на двигателе или на ракете и не показанных на представленных в настоящей заявке чертежах.
Узел крепления изогнутого трубопровода на раме изображен на фиг. 9, 10. На фиг. 9 изображен изогнутый трубопровод 8, причем левое колено изогнутого трубопровода показано для удобства восприятия без траверсы. Каждый конец раздвоенного изогнутого трубопровода 8 высокотемпературного окислительного газа выполнен с силовым кольцом 49 (фиг. 10) и снабжен цапфой 50. На цапфах 50 посажены сферические подшипники скольжения, каждый из которых имеет внутреннее кольцо 51, выполненное эксцентричным, и наружное 52. Цапфа 52 посажена в подшипник через втулку 53, которая также имеет эксцентриситет.
Такое крепление изогнутого трубопровода в цапфах позволяет компенсировать несоосности соединяемых конструкций.
Работает предложенный жидкостный ракетный двигатель, выполненный в соответствии с настоящим изобретением, следующим образом. В исходном и транспортировочном положении турбонасосный агрегат 3 и газогенератор 7 подвешены на закрепленном на секциях рамы 24, 25 изогнутом раздвоенном трубопроводе 8. Турбина 6 герметично закреплена на входной части этого трубопровода 8. Каждая из камер 1 и 2 закреплена на своем сильфонном компенсаторе 9 и карданном механизме 10. Входы сильфонных компенсаторов 9 герметично скреплены с выходными концами трубопровода 8, которые установлены в осевых шарнирах в траверсах 30 рамы (24, 25). Таким образом, вес камер 1 и 2 передается на раму (24, 25).
По программе запуска пусковое горючее из ампул 17 подается в газогенератор 7 и камеры 1 и 2, туда же подается также окислитель, жидкий кислород, обеспечивая запуск двигателя и подачу в камеры 1 и 2 и газогенератор 7 горючего керосин. В результате выходит на номинальные обороты и режим работы турбонасосный агрегат 3 и весь ЖРД.
Тяга от камер 1 и 2 суммируется с весом двигателя и силой от давления на трубопроводе 8, передается на траверсы 30 секций - рамы 24 и рамы 25. Эти усилия через раму и ее пяты 31 и 32 передаются на ракету. Для предотвращения на работающем ЖРД чрезмерной деформации рамы секции 24 и 25 скреплены между собой через плоское стержневое сочленение, выполненное из сваренных труб в виде крестовины 26. Эта крестовина 26 (фиг. 3, 4) делает конструкцию рамы более жесткой. Благодаря тому, что турбонасосный агрегат подвешен на раздвоенном трубопроводе, удается раму сделать более легкой, а значит снизить массу ЖРД и ракеты в целом.
При необходимости отклонения камер 1 и 2 (фиг. 1, 2) от номинального углового положения срабатывают рулевые приводы 16. Камера 1 и/или 2 отклоняется, поворачиваясь вокруг центра O1 и/или О2 своего сильфонного компенсатора 9 с карданом 10. При этом трубопроводы подвода горючего 22 к камерам 1 и/или 2 соответственно изменяют свое положение в пространстве за счет компенсации угловых перемещений карданными сильфонными компенсаторами 15. При этом в соответствии с изменением положения своих трубопроводов меняют свое положение гибкие металлические рукава 23 в двух взаимно перпендикулярных плоскостях.
Тяга двигателя воспринимается опорами, роль которых выполняют имеющиеся на раме траверсы 30 (фиг. 9, 10) через цапфы 50 и кольца сферических подшипников 51 и 52.
На работающем двигателе по раздвоенному изогнутому трубопроводу 8 перемещается высокотемпературный окислительный газ под высоким давлением. В результате трубопровод 8 деформируется. Наличие шарнира, состоящего из цапфы 50, колец 51 и 52 подшипников скольжения, закрепленного на траверсах 30 рамы, и герметичное скрепление силового кольца 49 трубопровода 8 с сильфоном компенсатора 9 обеспечивает возможность углового поворота в цапфах 50 выходных концов раздвоенного трубопровода 8 и исключает его поворот совместно с траверсой 30.
Это дает возможность существенно снизить напряжение в трубопроводе 8, который является в прочностном отношении наиболее напряженным местом двигателя, а также дает возможность снизить массу трубопровода 8.
При останове двигателя, давление компонентов в магистральных трубопроводах сбрасывается в результате останова турбонасосного агрегата 3 и затухания процессов в камерах 1 и 2 и газогенераторе 7.
Наиболее успешно заявленный жидкостный ракетный двигатель может быть применен в ракетной технике.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖИДКОСТНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2014 |
|
RU2563596C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ ТУРБОГАЗА | 1999 |
|
RU2158839C2 |
| УЗЕЛ КАЧАНИЯ КАМЕРЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ | 1999 |
|
RU2159352C2 |
| УЗЕЛ КАЧАНИЯ КАМЕРЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ (ЖРД) | 1998 |
|
RU2160376C2 |
| Многокамерный жидкостный ракетный двигатель с дожиганием генераторного газа | 2017 |
|
RU2674828C1 |
| ГАЗОВОД ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ | 2005 |
|
RU2339831C2 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| Двигательная установка с жидкостными ракетными двигателями | 2023 |
|
RU2826196C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ ПО СХЕМЕ С ДОЖИГАНИЕМ ГЕНЕРАТОРНОГО ГАЗА | 2012 |
|
RU2520771C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ (ЖРД) НА КРИОГЕННОМ ТОПЛИВЕ С ЗАМКНУТЫМ КОНТУРОМ ПРИВОДА ТУРБИНЫ ТУРБОНАСОСНОГО АГРЕГАТА (ВАРИАНТЫ) | 1999 |
|
RU2155273C1 |



Жидкостный ракетный двигатель включает две камеры, закрепленные на раме, прикрепленный к раме турбонасосный агрегат, имеющий турбину, насосы окислителя и горючего, трубопроводы подачи окислителя и горючего в газогенератор и камеры двигателя. Рама выполнена разборной и содержит по меньшей мере две зеркально симметричные секции. Указанная рама снабжена опорами для восприятия усилий от двигателя и пятами для крепления рамы к корпусу ракеты. Пяты и опоры расположены в плоскостях, перпендикулярных продольной оси двигателя. Плоскость расположения пят находится между плоскостью расположения опор и корпусом ракеты. Двигатель содержит раздвоенный изогнутый трубопровод подачи высокотемпературного окислительного газа, единый концевой участок которого соединен с выходом турбины. Два других его колена соединены с соответствующими камерами через сильфонные компенсаторы, являющиеся узлами качания камер. Указанные колена, кроме того, прикреплены к двум указанным секциям. Каждый из трубопроводов подачи горючего к камерам содержит два сильфонных компенсатора. Изобретение позволяет улучшить использование пространства двигательного отсека ракеты, упростить процесс сборки двигателя. Изобретение также позволяет уменьшить осевой габарит двигателя и осевой габарит и массу ракетоносителя. 8 з.п.ф-лы, 10 ил.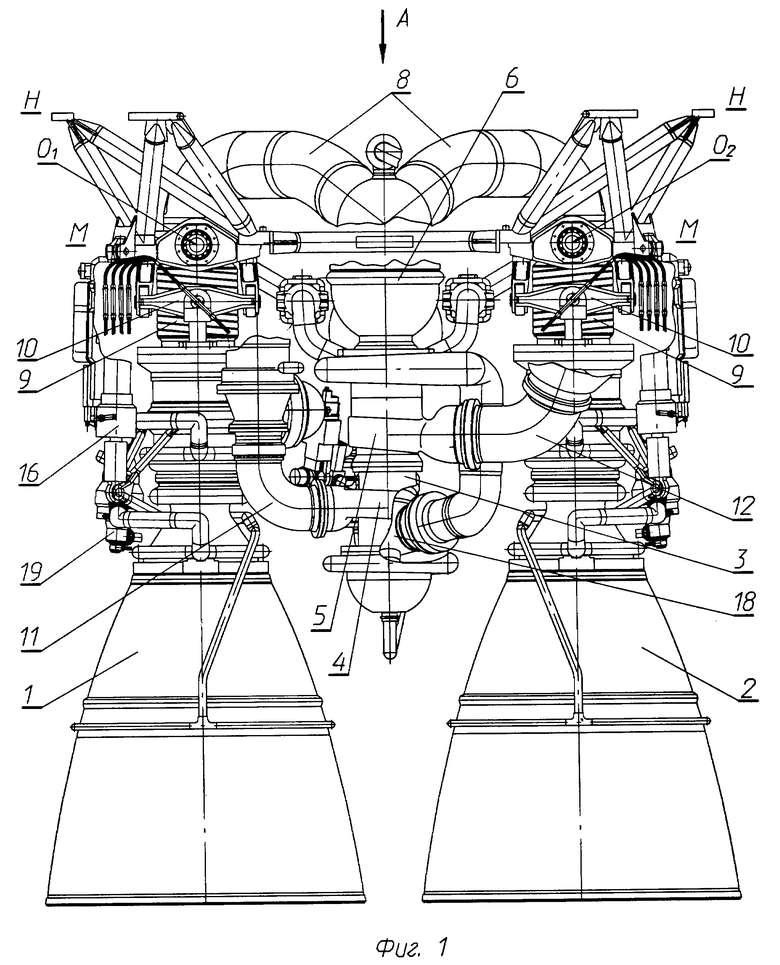
| Космонавтика | |||
| Энциклопедия | |||
| Гл | |||
| ред | |||
| В.П.ГЛУШКО | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Катодная трубка Брауна | 1922 |
|
SU330A1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1986 |
|
RU2083859C1 |
| ДВИГАТЕЛЬ ДЛЯ РАКЕТНОЙ СИЛОВОЙ УСТАНОВКИ ЖИДКОГО ТОПЛИВА (ВАРИАНТЫ) | 1996 |
|
RU2119081C1 |
| FR 2073451 A, 01.10.1974 | |||
| US 3146589 A, 01.09.1964 | |||
| US 3127740 A, 07.04.1964 | |||
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА ПРИЗАБОЙНУЮ ЗОНУ ПЛАСТА | 1996 |
|
RU2113628C1 |

