Область техники изобретения
Настоящее изобретение относится в целом к предварительной коррекции цифрового аудио и более конкретно - к схеме контроллера предварительной коррекции цифрового аудио, который формирует несколько сигналов для системы формирования звука, с целью модификации динамической характеристики скорректированной системы, измеряемой в нескольких измерительных положениях в интересующей области пространства в среде прослушивания.
Предшествующий уровень техники
Система для формирования либо воспроизведения звука, включая усилители, кабели, громкоговорители и акустику помещений, всегда воздействует на спектральные, переходные и пространственные свойства воспроизводимого звука, часто нежелательным образом. В частности, акустическая реверберация помещения, где размещено оборудование, имеет значительное и часто вредное воздействие на воспринимаемое качество аудиосистемы. Эффект реверберации часто описывается по-разному, в зависимости от того, какая частотная область рассматривается. При низких частотах реверберация часто описывается в терминах резонансов, стоячих волн либо так называемых собственных режимов помещения, которые воздействуют на воспроизводимый звук с помощью внедрения высоких пиков и глубоких провалов на определенных частотах в нижнем пределе спектра. При более высоких частотах реверберация в общем рассматривается как отражения, поступающие в уши слушателя спустя некоторое время после прямого звука из самого громкоговорителя.
Воспроизведение звука с очень высоким качеством может в целом быть достигнуто с использованием подходящих наборов высококачественных кабелей, усилителей и громкоговорителей, и с модификацией акустических свойств помещения, используя, например, акустические рассеиватели, резонаторы Гельмгольца и материалы с акустическим поглощением. Тем не менее, подобное пассивное средство для улучшения качества звука является громоздким, дорогим и даже иногда недопустимым.
Другие способы для улучшения качества систем воспроизведения звука включают в себя активные решения на основе цифровой фильтрации, часто упоминаемой как предварительная коррекция, выравнивание либо дереверберация.
Фильтр R предварительной коррекции на фиг. 1 затем помещается между источником исходного аудиосигнала и аудиооборудованием. Динамические свойства системы формирования звука могут быть измерены и смоделированы с помощью записи ответа системы на известные тестовые сигналы в одном либо нескольких положениях в помещении. Фильтр R затем вычисляется и реализуется с возможностью коррекции измеренных свойств систем, обозначенных с помощью H на фиг. 1. В частности, желательно, чтобы фазочастотная и амплитудная характеристики компенсированной системы были близкими к заранее определенному идеальному ответу, обозначенному символом D на фиг. 1, во всех измерительных положениях. Другими словами, необходимо, чтобы воспроизведение y(t) скорректированного звука соответствовало идеальному yref(t) в некоторой степени точности. Предварительное искажение, сформированное предварительным корректором R, предназначено для нейтрализации помех из-за системы H из условия, чтобы результирующее воспроизведение звука имело звуковую характеристику D. Для того чтобы получить предварительный корректор, который является надежным и практически полезным, важно понимать, что модель H не может быть совершенным описанием реальной системы, и записи ответов системы могут содержать помехи из-за, например, фонового шума. Подобное измерение и ошибки моделирования могут, например, быть представлены с помощью добавления шумового сигнала, e(t) на фиг. 1 в систему, получая измеряемый выход ym(t) системы. Как будет описано в последующем, ошибки моделирования и неопределенности системы могут быть также включены в модель H, которая затем является частично параметризованной с помощью случайных переменных с определенными распределениями вероятностей.
Таким образом, по меньшей мере, в теории, вплоть до физических границ системы, возможно получать улучшенное качество воспроизведения звука без высоких затрат на использование исключительно аудиооборудования высокого класса. Задачей схемы может являться, например, подавление акустических резонансов и эффектов дифракции, вызванных несовершенством создания корпусов громкоговорителей. Другим вариантом применения может быть минимизация воздействия режимов помещения (то есть низкочастотные резонансные пики и провалы) в различных местах помещения для прослушивания. Еще одной задачей может быть получение приятного тонального баланса и подробно воспринимаемого стереоизображения.
До сих пор созданные способы для цифровой предварительной коррекции аудиосистем, которые существуют на коммерческом рынке и в научной литературе, являются главным образом одноканальными способами, см., например, (17). Одноканальная предварительная коррекция относится к принципу, когда входной сигнал в громкоговорителе обрабатывается единственным фильтром. Когда используется одноканальная предварительная коррекция для звуковой системы, содержащей более одного канала громкоговорителей, например система с домашним кинотеатром 5.1, у которой имеется пять широкодиапазонных каналов и сабвуфер, это означает, что фильтры для разных каналов громкоговорителя определяются отдельно и независимо друг от друга. Степень, в которой каждый громкоговоритель с коррекцией действительно получает свою определенную идеальную целевую характеристику во всех измерительных положениях, зависит главным образом от следующих двух факторов:
1. Если импульсная характеристика громкоговорителя и помещение не являются полностью характеристикой минимальной фазы, тогда корректирующий фильтр должен быть фильтром так называемого типа со смешанной фазой, для того, чтобы скорректировать компоненты помех, которые не являются минимальной фазой. Поскольку почти все импульсные характеристики громкоговорителей для помещений содержат компоненты с неминимальной фазой (23), то фильтр минимальной фазы будет недостаточным для коррекции системы, так чтобы полностью достичь целевой характеристики. Поскольку схема фильтров со смешанной фазой для аудиоиспользования является значительно менее эффективной, чем схема фильтров с минимальной фазой, большинство существующих продуктов для цифровой предварительной коррекции используют фильтры, которые ограниченно являются типом фильтров с минимальной фазой.
2. Если импульсная характеристика громкоговорителя изменяется между различными измерительными положениями, что является обычным делом в помещении, тогда единственный фильтр не сможет полностью корректировать ответ громкоговорителя во всех измерительных положениях из-за конфликтных требований в различных положениях. В промежуточном смысле характеристика скорректированной системы может быть ближе к целевой, но из-за пространственной изменчивости системы всегда будут остаточные ошибки в каждом измерительном положении. Более того, если используется корректор смешанной фазы, тогда могут происходить ошибки в виде так называемых "предварительных вызовов" до тех пор, пока не будет спроектирован корректор с большой осторожностью (5). Ошибки предварительных вызовов известны как воспринимаемые гораздо более неприятными, чем ошибки последующих вызовов. В (5, 6) показано, как спроектировать корректор смешанной фазы, который смягчает проблему ошибок предварительных вызовов, корректируя только неминимально-фазовые помехи, которые являются общими для всех измерительных положений.
Таким образом, способ коррекции единственного канала имеет потенциальное ограничение в том, что он может корректировать импульсные и частотные характеристики в промежуточном смысле, когда рассматриваются многочисленные измерительные положения. В акустической среде, где исходная характеристика громкоговорителя сильно изменяется между измерительными положениями, эта изменчивость останется также в характеристиках скорректированного громкоговорителя, хотя скорректированная производительность системы в среднем будет ближе к целевым характеристикам. Более того, проектирование корректора в отношении только одного измерительного положения не является реалистичным вариантом, так как хорошо известно, что схемы с единственной точкой дают фильтры, которые являются исключительно ненадежными и ухудшают производительность системы во всех других положениях в помещении (13, 14).
Можно сделать вывод о том, что способы предварительной коррекции единственного канала являются наиболее эффективными для коррекции ухудшений, которые являются систематическими в интересующей пространственной области, то есть компоненты искажения, которые являются общими либо, по меньшей мере, почти общими для всех измерительных положений. Типично подобные систематические ухудшения вызваны самим громкоговорителем либо отражающими поверхностями, очень близкими к громкоговорителю, либо акустикой помещений при низких частотах, где длина волны является большой, сравнимой с интересующей областью. Если система воспроизведения звука, включающая свою акустическую среду, такова, что ее изменяющиеся пространственные помехи превосходят общие пространственные помехи, тогда улучшение качества звука, предлагаемое способами с единственным каналом, к сожалению, достаточно небольшое.
Принимая во внимание вышеизложенное, можно задать вопрос о том, возможно ли достичь стратегии предварительной коррекции с более высокой производительностью, например, используя громкоговорители и структуры фильтров гораздо более гибким способом, чем тот, который предлагается принятыми способами с единственным каналом. В исследовательской литературе, относящейся к акустике, определены несколько иные стратегии, которые не ограничиваются традиционной фильтрацией с единственным каналом (2, 7, 9, 10, 11, 12, 18, 21, 22, 24, 25, 29, 33, 34). Таким образом, известные способы могут быть сгруппированы в следующие категории.
1. Способы в первой категории основаны на физическом понимании акустики помещений и частично, акустической связи между громкоговорителями и режимами низкочастотных резонансов помещения. Хорошо известно, что тщательно выбранное физическое размещение громкоговорителей и использование нескольких сабвуферов является полезным для снижения воздействия режимов помещения (34).
2. Другим принципом является способ источника-стока (7, 8, 33), где режимы помещений ослабляются расположением множества сабвуферов симметрично в помещении, после чего корректировки задержек, усилений и фазовые корректировки используются для различных каналов сабвуферов. Согласно этому способу сабвуферы на передней стене помещения действуют как источники звука, тогда как сабвуферы с корректировками задержек, усилений и фаз на задней стене действуют как стоки, то есть поглотители звука, которые подавляют низкочастотные отражения от задней стены. Тем не менее, способ ограничен для работы только на самой нижней части спектра (ниже 150 Гц), и тип корректировок, выполненных над сигналами сабвуферов, является очень примитивным.
3. Третьим важным способом является модальное выравнивание (16, 21), в котором модальные резонансы и их время затухания выравниваются с помощью цифровых предварительных фильтров. Этот способ включает в себя явную идентификацию средних частот и времени затухания режимов единственного помещения и ограничен работой на очень низких частотах (типично только ниже 200 Гц), где допускается, что резонансы помещения являются четкими и хорошо разделенными по оси частот. Ссылка (16) рассматривает два возможных подхода, тип I, который является одноканальным выравнивателем, и тип II, который использует два либо более каналов для подавления режимов помещения. В (16) признано, что схема фильтра для модального выравнивания типа II не является эффективной, когда используется более чем два канала, и не представлено явное решение для многоканальной схемы. В совокупности подход является неудовлетворительным, так как он основывается на допущениях, которые в целом невыполнимы в типичном помещении, например, что все режимы, подлежащие выравниванию, хорошо разделены и оцениваются с высокой точностью.
4. Четвертая категория способов основана на схеме многоканального фильтра для различных задач. Одной задачей является активное управление шумом, где звук от одного либо нескольких громкоговорителей используется для подавления нежелательных акустических помех, см., например, (11). Второй задачей является получение точного воспроизведения определенных значений звукового давления в небольшом числе пространственных положений, типично положений в районе ушей слушателей. Этот подход часто упоминается как подавление переходного затухания, виртуальная визуализация акустических колебаний либо трансакустическое стерео (2, 22, 24, 25). Недостатком этого подхода является то, что его производительность является исключительно чувствительной к небольшим передвижениям слушателя и конкретно ненадежным к обычным реверберирующим помещениям. Третья общая задача относится к "голофоническим" акустическим методам исполнения, например синтез волнового поля (WFS) и амбиофонии высокого порядка (HOA) (10, 28, 30), которая нацелена на воспроизведение произвольных звуковых полей в больших областях в двух либо трех размерностях, используя большой набор громкоговорителей из 50 либо более громкоговорителей. Множество схем многоканальных фильтров предложено для улучшения производительности WFS, HOA и связанных методов, см., например, (9, 12, 18, 29). Четвертая задача касается минимизации деструктивной фазы взаимодействия в области переходной частоты между сабвуфером и сопутствующими громкоговорителями в звуковых системах, использующих так называемое управление низкочастотными сигналами (3). Эти упомянутые схемы многоканальных фильтров не подходят в качестве решений проблемы общей предварительной коррекции громкоговорителей. Во-первых, они значительно отличаются по своим задачам в сравнении со способами предварительной коррекции единственного канала. Во-вторых, предложенные вычислительные способы выдают фильтры с неудовлетворительными свойствами. Например, большинство способов проектирует фильтры в частотной области без связи с режимом широкополосного фильтра, например причинная связь, максимально допустимая задержка в системе и уровень и длительность ошибок предварительных вызовов.
Никакой из способов создания схем с многоканальными фильтрами в предшествующем уровне техники не является полезным для цели надежного широкодиапазонного громкоговорителя/коррекции в помещении существующего громкоговорителя, установленного для стерео либо многоканального воспроизведения звука.
Сущность изобретения
Общей задачей является предоставление стратегии расширенной предварительной коррекции для улучшения воспроизведения стерео либо многоканального аудиоматериала в двух либо более громкоговорителях.
Конкретной задачей является предоставление способа для определения контроллера предварительной коррекции аудио для ассоциированной системы формирования звука.
Другой конкретной задачей является предоставление системы для определения контроллера предварительной коррекции аудио для ассоциированной системы формирования звука.
Еще одной конкретной задачей является предоставление компьютерного программного продукта для определения контроллера предварительной коррекции аудио для ассоциированной системы формирования звука.
Также конкретной задачей является предоставление улучшенного контроллера предварительной коррекции аудио, а также аудиосистемы, содержащей подобный контроллер предварительной коррекции аудио и цифровой аудиосигнал, сформированный таким контроллером предварительной коррекции аудио.
Эти и другие цели выполнены изобретением, как задано прилагаемой формулой изобретения.
Основной идеей является определение контроллера предварительной коррекции аудио для ассоциированной системы формирования звука, содержащей в совокупности более двух громкоговорителей N≥2, каждый из которых имеет вход. Контроллер предварительной коррекции аудио имеет множество входов L≥1 для L входного сигнала(ов) и N выходов для N выходных сигналов контроллера, по одному на каждый громкоговоритель системы формирования звука, и контроллер предварительной коррекции аудио в целом имеет множество регулируемых параметров фильтра. Уместно оценить для, по меньшей мере, одного из подмножества N входов громкоговорителя импульсную характеристику для каждой из множества M≥2 измерительных положений, распределенных в интересующей области среды прослушивания на основе измерений звука в M измерительных положениях. Также важно определить для каждого из L входных сигналов один выбранный громкоговоритель из N громкоговорителей в качестве главного громкоговорителя и выбранное подмножество S, включающее в себя, по меньшей мере, один из N громкоговорителей в качестве поддерживающего громкоговорителя(ей), где главный громкоговоритель не является частью этого подмножества. Ключевой точкой является определение для каждого главного громкоговорителя целевой импульсной характеристики в каждом из M измерительных положений с целевой импульсной характеристикой, обладающей задержкой в распространении звука, где задержка в распространении звука определяется на основе расстояния от главного громкоговорителя до соответствующего измерительного положения. Тогда замысел состоит в том, чтобы определить для каждого из L входных сигналов на основе выбранного главного громкоговорителя и выбранного поддерживающего громкоговорителя(ей), параметров фильтра контроллера предварительной коррекции аудио так, чтобы критериальная функция оптимизировалась при ограничении стабильности динамических свойств контроллера предварительной коррекции аудио. Критериальная функция включает в себя взвешенное суммирование мощностей разниц между скорректированными оцениваемыми импульсными характеристиками и целевыми импульсными характеристиками по М измерительным положениям.
Различные аспекты изобретения включают в себя способ, систему и компьютерную программу для определения контроллера предварительной коррекции аудио, такой определяемый контроллер предварительной коррекции, аудиосистему, включающую в себя, например, контроллер предварительной коррекции аудио, а также цифровой аудиосигнал, сформированный подобным контроллером предварительной коррекции аудио.
Настоящее изобретение предлагает следующие преимущества:
- схема улучшенной конструкции для контроллера предварительной коррекции аудио.
- Улучшенное воспроизведение стерео либо многоканального аудиоматериала по сравнению с двумя либо более громкоговорителями.
- Лучшая производительность в помещениях либо средах прослушивания, где импульсные характеристики громкоговорителей изменяются с пространственным положением.
- Более высокая гибкость, где улучшения производительности не ограничены для низких частот.
- Управление аспектами, например, причинной связью и дефектами предварительного вызова.
Другие преимущества и признаки, предлагаемые настоящим изобретением, будут приняты во внимание при прочтении последующего описания вариантов осуществления изобретения.
Краткое описание чертежей
Изобретение вместе с дополнительными объектами и их преимуществами может быть понято по ссылкам на последующее описание, воспринимаемое вместе с прилагаемыми чертежами, на которых:
фиг. 1 описывает одноканальный корректор R, у которого имеется сигнал w(t) в качестве входного сигнала. Корректор порождает управляющий сигнал u(t), который действует в качестве входа в стабильную линейную динамическую SIMO-модель (единственный вход и многочисленные выходы) H акустической системы. Модель H имеет один вход и М выходов, где М выходов представляют собой М измерительных положений. Акустические сигналы в М измерительных положениях представлены вектором-столбцом y(t). Желательные свойства динамической системы заданы стабильной SIMO-моделью D, у которой имеется один вход и М выходов. Когда сигнал w(t) используется в качестве входа в D, результирующий выход является вектором yref(t) желательного сигнала с М элементами. М-мерный вектор ym(t) сигнала представляет собой измерение y(t) и вектор e(t) сигнала, который также имеет размерность М, представляет собой возможные помехи измерений.
Фиг. 2 описывает многоканальный корректор R, у которого имеется сигнал w(t) в качестве входного сигнала. Корректор порождает многоканальный управляющий сигнал u(t), с N элементами, который действует в качестве входа в стабильную линейную динамическую MIMO-модель (многочисленные входы и многочисленные выходы) H акустической системы. Модель H имеет N входов и M выходов, где N входов представляет собой входы в N громкоговорителей и M выходов представляет собой M измерительных положений. Акустические сигналы в М измерительных положениях представлены вектором-столбцом y(t). Желательные свойства динамической системы заданы стабильной SIMO-моделью D, у которой имеется один вход и М выходов. Когда сигнал w(t) используется в качестве входа в D, результирующий выход является вектором yref(t) желательного сигнала с М элементами. М-мерный вектор ym(t) сигнала представляет собой измерение y(t) и вектор e(t) сигнала, который также имеет размерность М, представляет собой возможные помехи измерений.
Фиг. 3 является схематическим представлением, иллюстрирующим пример аудиосистемы, включающей в себя систему формирования звука и контроллер предварительной коррекции аудио.
Фиг. 4 является схематической блок-схемой примера системы, основанной на компьютере, подходящей для реализации изобретения.
Фиг. 5 является схематичной блок-схемой алгоритма, иллюстрирующей способ для определения контроллера предварительной коррекции аудио согласно примерному варианту осуществления.
Фиг. 6 представляет собой частотные характеристики громкоговорителя в помещении, измеряемые в 64 положениях (серые линии) и их среднее среднеквадратическое (RMS) значение (черная линия).
Фиг. 7 является частотной характеристикой того же громкоговорителя, как и на фиг. 6, после использования одноканального фильтра с предварительной коррекцией для его входа. Чертеж показывает частотные характеристики, измеряемые в 64 положениях (серые линии) и их среднее среднеквадратическое значение (черная линия).
Фиг. 8 показывает результат многоканальной предварительной коррекции, где громкоговоритель фиг. 6 использовался в качестве главного громкоговорителя, и дополнительные 15 громкоговорителей использовались в качестве поддерживающих громкоговорителей. Чертеж показывает частотные характеристики, измеряемые в 64 положениях (серые линии) и их среднее среднеквадратическое значение (черная линия).
Фиг. 9 показывает каскадную диаграмму либо кумулятивное затухание спектра того же самого громкоговорителя, как и на фиг. 6, когда не используется никакой предварительной коррекции. Каскад, показанный на чертеже, является средним кумулятивным затуханием спектра импульсной характеристики громкоговорителя в 64 положениях.
Фиг. 10 показывает каскадную диаграмму либо кумулятивное затухание спектра того же самого громкоговорителя, как и на фиг. 7, где используется одноканальный фильтр предварительной коррекции. Каскад, показанный на чертеже, является средним кумулятивным затуханием спектра скорректированной импульсной характеристики громкоговорителя в 64 положениях.
Фиг. 11 показывает каскадную диаграмму либо кумулятивное затухание спектра того же самого громкоговорителя, как и на фиг. 8, где стратегия многоканальной предварительной коррекции используется для коррекции главного громкоговорителя, используя 15 дополнительных поддерживающих громкоговорителей. Каскад, показанный на чертеже, является средним кумулятивным затуханием спектра скорректированной импульсной характеристики громкоговорителя в 64 положениях.
Подробное описание
По всем чертежам одни и те же условные обозначения используются для аналогичных либо соответствующих элементов.
Предложенная технология основана на утверждении, что математические модели динамических систем и оптимизация цифровых фильтров предварительной коррекции на основе моделей предоставляют мощные средства для проектирования фильтров, которые улучшают производительность различных типов аудиооборудования с помощью модификации входных сигналов в оборудование. Кроме того, следует отметить, что соответствующие модели могут быть получены с помощью измерений во множестве измерительных положений, распределенных в интересующей области в среде прослушивания.
Как упомянуто, основным замыслом является определение контроллера предварительной коррекции аудио для ассоциированной системы формирования звука. Как проиллюстрировано в примере на фиг. 3, система формирования звука содержит совокупность из N≥2 громкоговорителей, у каждого из которых есть вход громкоговорителя. Контроллер предварительной коррекции аудио имеет множество L≥1 входов для L входных сигналов и N выходов для N выходных сигналов контроллера, один на каждый громкоговоритель системы формирования звука. Следует понимать, что выходные сигналы контроллера направлены в громкоговорители, то есть во входной путь громкоговорителей. Выходные сигналы контроллера могут быть переданы во входы громкоговорителей через дополнительную схему (обозначенную с помощью пунктирной линии), например, цифро-аналоговых преобразователей, усилителей и дополнительных фильтров. Дополнительная схема также может включать в себя беспроводную линию связи.
В целом, контроллер предварительной коррекции аудио имеет множество регулируемых параметров фильтра, которые необходимо определить в схеме проекта фильтра. Контроллер предварительной коррекции аудио при проектировании должен формировать таким образом N выходных сигналов контроллера в системе формирования звука с целью модификации динамической характеристики скорректированной системы, как измерено во множестве M≥2 измерительных положений, распределенных в интересующей области в среде прослушивания.
Фиг. 5 является схематичной блок-схемой алгоритма, иллюстрирующей способ для определения контроллера предварительной коррекции аудио согласно примерному варианту осуществления. Этап SI включает в себя оценку для, по меньшей мере, одного из множества N входов громкоговорителя, импульсную характеристику для каждой из множества M≥2 измерительных положений, распределенных в интересующей области в среде прослушивания на основе измерений звука в M измерительных положениях. Этап S2 включает в себя определение для каждого из L входных сигналов один выбранный громкоговоритель из N громкоговорителей в качестве главного громкоговорителя и выбранное подмножество S, включающее в себя, по меньшей мере, один из N громкоговорителей в качестве поддерживающего громкоговорителя(ей), где главный громкоговоритель не является частью этого подмножества. Этап S3 включает в себя определение для каждого главного громкоговорителя целевой импульсной характеристики в каждом из M измерительных положений с целевой импульсной характеристикой, обладающей задержкой в распространении звука, где задержка в распространении звука определяется на основе расстояния от главного громкоговорителя до соответствующего измерительного положения. Этап S4 включает в себя определение для каждого из L входных сигналов на основе выбранного главного громкоговорителя и выбранного поддерживающего громкоговорителя(ей), параметров фильтра контроллера предварительной коррекции аудио так, чтобы критериальная функция оптимизировалась при ограничении стабильности динамических свойств контроллера предварительной коррекции аудио. Критериальная функция включает в себя взвешенное суммирование мощностей разниц между скорректированными оцениваемыми импульсными характеристиками и целевыми импульсными характеристиками по М измерительным положениям.
Иными словами, контроллер предварительной коррекции аудио выполнен с возможностью управления акустической характеристикой P главных громкоговорителей, где P≤L и P≤N, с помощью комбинированного использования P главных громкоговорителей и для каждого главного громкоговорителя дополнительное число поддерживающих громкоговорителей 1≤S≤N-1 из N громкоговорителей.
Если существует два либо более входных сигналов, то есть L≥2, то способ также может в себя включать дополнительный этап S5 объединения всех параметров фильтра, заданных для L входных сигналов, в объединенное множество параметров фильтра для контроллера предварительной коррекции аудио. Контроллер предварительной коррекции аудио с объединенным набором параметров фильтра выполнен с возможностью работы по L входным сигналам для формирования N выходных сигналов контроллера для громкоговорителей для получения целевых импульсных характеристик.
В качестве примера для контроллера предварительной коррекции аудио желательно иметь возможность создания нулевого сигнала на выходе в некоторые из N громкоговорителей для некоторого набора регулируемых параметров фильтра.
Предпочтительно, чтобы целевые импульсные характеристики являлись ненулевыми и включали в себя регулируемые параметры, которые могут быть модифицированы в допустимых пределах. Например, регулируемые параметры целевых импульсных характеристик, а также регулируемые параметры контроллера предварительной коррекции аудио могут регулироваться совместно с целью оптимизации критериальной функции.
В конкретном примерном варианте осуществления этап определения параметров фильтра контроллера предварительной коррекции аудио основан на ЛКГ-оптимизации (линейно-квадратичная гауссовская, LQG) параметров постоянного, линейного и зависимого контроллера с многопеременной прямой связью в указанной целевой динамической системе, и на динамической модели системы формирования звука. Как упомянуто, выходные сигналы контроллера могут быть переданы на входы громкоговорителя через дополнительную схему. Например, каждый из N выходных сигналов контроллера контроллера предварительной коррекции аудио могут быть поданы в соответствующий громкоговоритель через всечастотный фильтр, включающий в себя компонент корректировки фазы и компонент задержки, что приводит к N отфильтрованным выходным сигналам контроллера.
Дополнительно критериальная функция включает в себя элементы выбраковки, при этом элементы выбраковки таковы, что контроллер предварительной коррекции аудио, полученный оптимизацией критериальной функции, порождает уровни сигнала ограниченной величины по выбранному подмножеству выводов контроллера предварительной коррекции, получая ограниченные уровни сигнала по выбранным входам громкоговорителя для N громкоговорителей для заданных частотных диапазонов.
Элементы выбраковки могут быть по-разному выбраны множество раз, и этап определения параметров фильтров контроллера предварительной коррекции аудио повторяется для каждого выбора элементов выбраковки, что приводит ко множеству образцов контроллера предварительной коррекции аудио, каждый из которых порождает уровни сигнала с конкретными ограниченными значениями для S поддерживающих громкоговорителей для заданных частотных диапазонов.
В еще одном дополнительном варианте осуществления критериальная функция содержит представление возможных ошибок в оцениваемых импульсных характеристиках. Это представление ошибок спроектировано как набор моделей, который описывает допускаемый диапазон ошибок. В этом конкретном варианте осуществления критериальная функция также содержит операцию объединения, которая может быть суммированием, взвешенным суммированием либо статистическим ожиданием по упомянутому набору моделей.
В конкретном примере этап определения параметров фильтра контроллера предварительной коррекции аудио также основан на регулировании параметров фильтра контроллера предварительной коррекции аудио для достижения частотной характеристики целевого значения подобной системы формирования звука, включающей в себя контроллер предварительной коррекции аудио в, по меньшей мере, подмножестве M измерительных положений.
В качестве примера этап регулирования параметров фильтра контроллера предварительной коррекции аудио основан на оценке частотных характеристик величин в, по меньшей мере, подмножестве М измерительных положений и, следовательно, на определении модели с минимальной фазой системы формирования звука, включая контроллер предварительной коррекции аудио.
Предпочтительно, чтобы этап оценки для каждого одного из, по меньшей мере, подмножества N входов громкоговорителей импульсной характеристики в каждом из множества М измерительных положений был основан на модели, описывающей динамическую характеристику системы формирования звука в М измерительных положениях.
Как понятно специалисту, контроллер предварительной коррекции аудио может быть создан с помощью реализации параметров фильтра в структуре аудиофильтра. Структура аудиофильтра затем типично реализуется вместе с системой формирования звука, чтобы дать возможность сформировать целевую импульсную характеристику в М измерительных положениях в среде прослушивания.
Предложенная технология может использоваться во многих аудиоприложениях. Например, система формирования звука может быть автомобильной аудиосистемой либо мобильной студийной аудиосистемой, и среда прослушивания может быть частью автомобиля либо мобильной студии. Другие примеры системы формирования звука включают в себя аудиосистему домашнего кинотеатра, аудиосистему концертного зала, домашнюю аудиосистему либо профессиональную аудиосистему, где соответствующая среда прослушивания является частью домашнего кинотеатра, концертного зала, дома, студии, аудитории либо любых других помещений.
Теперь будет более подробно описана предложенная технология со ссылкой на различные неограничивающие, примерные варианты осуществления.
Управление звуковым полем с помощью линейной динамической предварительной коррекции
Линейные фильтры, динамические системы либо модели, которые могут иметь многочисленные входы и/или многочисленные выходы, представлены с помощью матриц переходных функций в последующем и обозначены с помощью каллиграфических букв полужирным шрифтом, например, H(q-1) либо просто H. Отдельным случаем матрицы переходных функций является матрица, которая включает в себя только FIR-фильтры в качестве элементов. Такие матрицы упоминаются как полиномиальные матрицы и обозначаются с помощью полужирных курсивных прописных букв, например, B(q-1) либо просто B. В данном документе q-1 обозначает оператор обратного сдвига, который при произведении действия над сигналом s(t) приводит к s(t-1), то есть q-1s(t)=s(t-1). Аналогично qs(t)=s(t+1). При оценке полиномиальной либо рациональной матрицы в частотной области сложная переменная z либо еjw меняется на q. Зависимая матрица FIR-фильтров (полиномиальная матрица) B(q-1) производит операции только над входными сигналами, которые являются текущими либо прошедшими в отношении индекса времени t. Таким образом, она будет иметь матрицы элементов, которые являются полиномиальными только в операторе q-1 обратного сдвига. Аналогично полиномиальная матрица B(q, q-1) производит действия как над последующими, так и над прошедшими сигналами, тогда как B(q) производит действия только над последующими сигналами. Верхний индекс ()T, например, ВT(q-1) либо BT означает транспозицию, и, когда используется для векторной, рациональной либо полиномиальной матрицы, это означает, что транспонированный вектор-строка становится вектором-столбцом, и j-ая строка рациональной либо полиномиальной матрицы становится j-тым столбцом той же самой матрицы. Аналогично значок () означает преобразование комплексно сопряженного элемента. Это означает, что векторная, рациональная либо полиномиальная матрица будет транспонирована, как объяснено выше, и их элементы будут комплексно сопряжены. Например, рациональная матрица F(q-1), которая является преобразованной с комплексным сопряжением, обозначена F(q). Матрица тождественного преобразования является постоянной матрицей с единицами по диагонали. Она обозначается I или IN, если размерность является N×N. Другая постоянная матрица, например 0N, обозначает нулевую матрицу размерностью N×N. Кроме того, diag((F1 … FN)T) обозначает диагональную матрицу с F1 … FN по диагонали, тогда как trP обозначает след матрицы Р, которая является суммой диагональных элементов Р.
Система формирования либо воспроизведения звука, которую необходимо модифицировать, будет представлена как фиг. 2 с помощью линейной, не зависящей от времени и стабильной динамической модели H, которая описывает связь в дискретные моменты времени между набором из N входных сигналов u(t) для набора из M моделируемых выходных сигналов y(t):
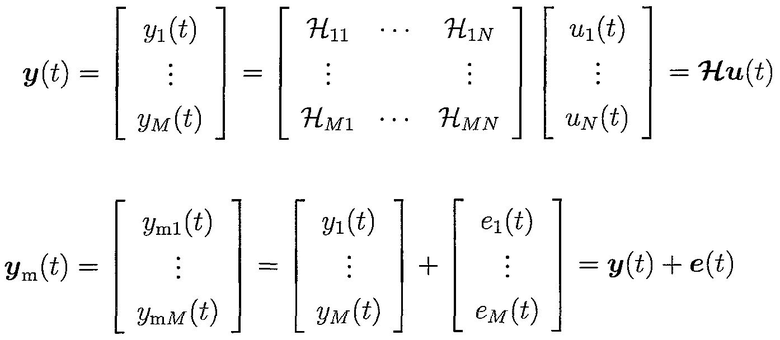
где t является целым значением, которое представляет собой индекс дискретного времени (предполагается единица выборки времени, где, например, t+1 означает одну выборку времени, отстоящую от момента времени t), и сигнал y(t) является М-размерным вектором-столбцом, представляющим собой смоделированное звуковое давление во временных рядах в М измерительных положениях. Оператор H представляет собой модель акустической динамической характеристики в виде передачи матрицы переходных функций. Это матрица размерности M×N, элементы которой являются линейными динамическими операторами либо переходами, например, представленными в качестве FIR-фильтров либо IIR-фильтров (фильтр с импульсной характеристикой бесконечной длительности). Эти фильтры определяют характеристику y(t) для N-мерного входного вектора u(t), зависящего от времени. Если модель H размерностью M×N содержит IIR-фильтры в качестве элементов, тогда ее можно описать с помощью так называемой правой MFD-формы (описание дроби в матрице)

где B(q-1) и A(q-1) являются полиномиальными матрицами размерностей M×N и, соответственно, N×N (15). Правая MFD-форма, которая существенно используется в последующем описании, включает в себя матрицу FIR-фильтров в качестве отдельного случая с помощью задания матрицы делителя для матрицы тождественного преобразования, то есть A=I.
Матрица H переходных функций представляет собой эффект целого либо части системы формирования звука либо системы воспроизведения звука, включая в себя любые предварительно существующие цифровые корректоры, цифро-аналоговые преобразователи, аналоговые усилители, громкоговорители, кабели и акустическую характеристику помещения. Другими словами, матрица H переходных функций представляет собой динамическую характеристику релевантных частей системы формирования звука. Входной сигнал u(t) для системы, который является вектором-столбцом размерности N, может представлять собой входные сигналы для N отдельных цепей усилитель-громкоговоритель системы формирования звука. Сигнал ym(t) (со значком m, обозначающим "измерение") является М-мерным вектором-столбцом, представляющим собой действительные (измеренные) звуковые временные ряды в М измерительных положениях и e(t) представляет собой фоновый шум, немоделируемые отражения в помещении, эффекты некорректной структуры модели, нелинейное искажение и другие варианты немоделируемого воздействия. Каждый М-мерный столбец из H представляет тогда М переходных функций между одним из N входов громкоговорителя и M измерительных положений.
Модель H может также включать в себя неопределенности аддитивной либо мультипликативной модели, в данном документе представленной в помощью рациональной матрицы ΔH. Если, например, неопределенности модели ΔH параметризованы с помощью полиномиальных матриц с помощью случайных коэффициентов, тогда соответствующей моделью может быть

где H(q-1) является номинальной моделью и ΔH(q-1), которые являются частично параметризованными с помощью случайных переменных, составляет модель неопределенности. Выписывая частные матрицы для H(q-1) и ΔH(q-1), декомпозиция (3) из H(q-1) расширяется до
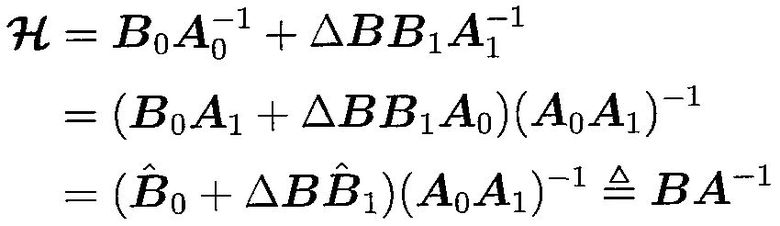
где 

Общей задачей управления звуковым полем является модификация динамики системы формирования звука, представленной с помощью (1) в связи с опорной динамикой. С этой целью представлена опорная матрица D (либо в этом случае вектор-столбец) динамических систем:
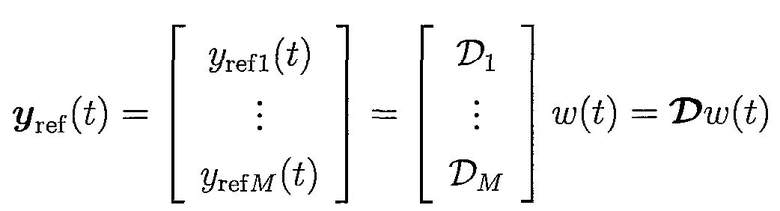
где w(t) является сигналом, представляющим собой живой либо записанный источник звука либо даже искусственно сформированный цифровой аудиосигнал, включающий в себя тестовые сигналы, используемые для разработки фильтра. Сигнал w(t) может, например, представлять собой цифровой записанный звук либо аналоговый источник, по которому выполнена выборка и оцифровывается. В (5) матрица является стабильным вектором-столбцом переходной функции размерностью M×1, предполагается, что она известна. Эта линейная, дискретная во времени динамическая система задана разработчиком. Она представляет собой опорную динамику (желаемая целевая динамика) вектора у (t) в (1). В скорректированной системе сигнал w(t) представляет собой один из общего числа L входных сигналов источника. Его желаемый эффект в М измерительных положениях представлен с помощью элементов D1, …, DM в D в (5). Система D может включать в себя набор настраиваемых параметров. Альтернативно, на нее косвенно может воздействовать подобный набор через его задание.
Предполагается, что контроллер предварительной коррекции аудио должен быть реализован в качестве многопеременного динамического дискретного во времени фильтра предварительной коррекции, как правило обозначенного с помощью R, который формирует вектор u(t) входного сигнала для аудиосистемы (1) воспроизведения звука на основе линейной динамической обработки сигнала w(t):
Этот контроллер предварительной коррекции аудио включает в себя набор настраиваемых параметров. Эти параметры должны позволить достаточную гибкость для модификации динамических свойств входа-выхода контроллера, например, позволяя некоторым элементам из R либо всем из R являться нулем для соответствующих настроек параметров. Оптимизация R, тем не менее, должна быть ограничена настройками параметров, которые делают R стабильной динамической системой ввода-вывода.
Целью нашего проекта будет создание стабильной матрицы R переходных функций размерностью N×1, которая спроектирована для формирования вектора u(t) входного сигнала для аудиосистемы (1) воспроизведения звука, из условия, чтобы вывод (t) ее скорректированной модели достаточно хорошо аппроксимировал опорный вектор yref(t), согласно заданному критерию. Эта цель была бы достигнута, если

Соответствующая ошибка аппроксимации, основанной на модели, в М измерительных положениях представлена с помощью

Действительный измеренный вектор ошибки представлен с помощью фиг. 2 и (1) yref(t)-ym(t)=ε(t)-e(t). Аппроксимация (7) никогда не сможет быть точной на практике с ограниченным числом N громкоговорителей, большим числом M измерительных положений и сложными широкодиапазонными акустическими динамическими моделями в H. Достижимое качество аппроксимации зависит от природы созданной проблемы. Для фиксированной заданной акустической среды качество аппроксимации может быть в целом улучшено, если число каналов N громкоговорителей будет увеличено. Оно может быть улучшено с помощью увеличения числа M измерительных положений в пределах подразумеваемой области прослушивания, так как это задает более плотную и более точную выборку звукового поля в качестве функции пространства. Увеличение области прослушивания либо добавление областей для фиксированного N, как правило, приводит к большим ошибкам аппроксимации.
Схема для вычисления соответствующей аппроксимации для настоящей проблемы очерчена ниже.
Важным аспектом для рассмотрения при разработке предварительного корректора является связь между первоначальной задержкой распространения системы, которая должна быть скорректирована, и первоначальной задержкой распространения желаемой целевой динамики. Первоначальной задержкой распространения динамической системы является время, которое занимает у сигнала для распространения от входа в выход системы. Другими словами, первоначальная задержка распространения задана с помощью момента времени первого ненулевого коэффициента импульсной характеристики системы. Система H, которая имеет первоначальную задержку распространения d выборок, может, следовательно, быть записана как 

Рассмотрим пример системы на фиг. 2 и предположим, что H имеет первоначальную задержку d1 распространения, и D имеет первоначальную задержку d0 распространения. Если d1>d0, тогда зависимый корректор R, который использует только текущие и прошлые значения w(t) и от которого нельзя ожидать нормальной работы, так как в момент t опорный сигнал yref(t) будет зависеть от значений w сигнала w(t-d0-k) для k≥0, тогда как вывод y(t) скорректированной системы будет зависеть только от w(t-d1-k) для k≥0, то есть опорный сигнал зависит от более новых данных, чем те, которые созданы на выходе системы. Корректор нацелен на управление y(t) опорным сигналом yref(t), но из-за разницы во времени задержки между H и D действие управляющего сигнала u(t) на выходе H всегда поступит в, по меньшей мере, выборки d1-d0 позже, чем необходимо. Для того чтобы корректор R нормально работал в подобном случае, он должен был бы быть независимым, то есть он должен был бы уметь прогнозировать, по меньшей мере, будущие значения d1-d0 сигнала w(t). Если связь между первоначальными задержками является противоположной, то есть если d1<d0, тогда корректор работает значительно лучше из-за значения D и w(t), у корректора есть возможность прогнозировать будущие значения опорного сигнала. Корректор может, следовательно, начать действовать заранее по динамике H по выборкам d0-d1 таким образом, что выход y(t) управляется гораздо эффективнее в отношении опорного сигнала yref(t).
Таким образом, как правило, возможно улучшить производительность предварительного корректора, гарантировав, что первоначальная задержка целевой динамики D является достаточно большой по сравнению с первоначальной задержкой системы H. Например, этого можно достичь с помощью сложения общей объемной задержки 


Для целей воспроизведения аудио, тем не менее, может быть проблематичным разрешить большую объемную задержку 
Тем не менее, хорошо известно, что большая целевая объемная задержка (также называемая задержка моделирования либо сглаживание с отставанием) может значительно улучшать производительность, когда система, которую необходимо скорректировать, содержит искажение неминимальной фазы. Более того, для одноканального случая существует способ для корректировки искажения неминимальной фазы и который не порождает предварительные вызовы (4, 5, 6). Рассматриваемый способ использует большую целевую объемную задержку 


Вышеописанный способ для одноканальной корректировки без предварительных вызовов может использоваться также в разработке многоканальных корректоров, в качестве этапа "создания предварительных условий", на котором отдельные каналы системы корректируются в отношении искажения фазы до разработки многоканального корректора. Расширяя этот подход, разрабатывается одноканальный фазовый корректор 

где 

Дополнительные значения d1, …, dN задержек выше могут использоваться для тонкой настройки связи между первоначальной задержкой распространения целевой системы D и первоначальными задержками распространения N каналов громкоговорителей (то есть первоначальные задержки распространения столбцов H).
Акустическое моделирование
Импульсные характеристики акустики помещений каждого из N громкоговорителей оцениваются из измерений в М положениях, которые распределены по пространственной области подразумеваемых положений слушателя. Рекомендуется, чтобы число измерительных положений М было больше, чем число громкоговорителей N. Динамические акустические характеристики могут затем оцениваться с помощью передачи тестовых сигналов от громкоговорителей, одного громкоговорителя в момент времени и записи результирующих акустических сигналов во всех М измерительных положениях. Тестовые сигналы, например белый либо цветной шум либо искривленные синусоиды, могут использоваться для этой цели. Модели линейных динамических характеристик от одного громкоговорителя в М выходов могут затем оцениваться в виде FIR либо IRR-фильтра с одним входом и M выходами. Различные методики идентификации системы, например способ наименьших квадратов либо методики на основе преобразования Фурье, могут использоваться для этой цели. Процедура измерения повторяется для всех громкоговорителей, в конечном счете приводя к модели U, которая представлена с помощью матрицы M×N динамических моделей. MIMO-модель (модель со многими входами и многими выходами) может быть альтернативно представлена с помощью описания в пространстве состояний.
Примером математически удобной, хотя и очень обобщенной MIMO-модели для представления системы воспроизведения звука является пример с помощью правой MFD с диагональным знаменателем,
которая является типом MFD, который будет использоваться в дальнейшем. Гораздо более обобщенную модель можно получить, если матрице A(q-1) допускается быть полностью полиномиальной матрицей, и, в принципе, нет ничего, что запрещает использование подобной структуры. Тем не менее, мы будем придерживаться структуры (11) в последующем, так как она допускает более очевидный вывод математического выражения оптимального контроллера. Следует заметить, что H, как задано в (11), может включать в себя параметризацию, которая описывает ошибки модели и неопределенности, как задано для примера с помощью (4).
Выбор главного и поддерживающих громкоговорителей
Для заданной системы воспроизведения звука контроллер предварительной коррекции должен быть разработан с целью улучшения акустического воспроизведения L сигналов источника с помощью, по меньшей мере, одного физического громкоговорителя. Для того чтобы улучшить акустическое воспроизведение, в данном документе подразумевается, что импульсная характеристика физического громкоговорителя, как измерено во множестве точек, изменяется с помощью корректора таким образом, что его отклонение от заданной идеальной целевой характеристики минимизируется.
Для того чтобы получить корректор, который является более общим, чем существующие одноканальные корректоры, настоящая схема выполнена при настолько небольших ограничениях, насколько возможно, рассматривая структуры фильтров и то, как используются громкоговорители. Единственными ограничениями, накладываемыми на корректор, является линейность, зависимость и стабильность. Ограничение одноканальных корректоров, то есть ограничение, что каждый из L сигналов источника может быть обработан только с помощью одного фильтра и распределен в только один вход громкоговорителя, в данном документе смягчено. Корректору, ассоциированному с каждым одним из L сигналов источника, таким образом допускается состоять из более чем одного фильтра, что приводит к, по меньшей мере, одному, но, возможно, к нескольким обрабатываемым версиям сигнала источника, который необходимо распределить в, по меньшей мере, один, но, возможно, несколько громкоговорителей.
Предположим в данном документе, что L сигналов источника представлены с помощью некоторой конкретной мысленной схемы размещения подразумеваемых физических громкоговорителей. Предполагается, что эта схема размещения состоит из не более L громкоговорителей, и каждый из L сигналов источника предназначен для подачи в максимум один вход громкоговорителя. Например, созданный формат аудио источника, например двухканальное стерео (L=2), предназначен для воспроизведения через пару громкоговорителей, расположенных симметрично в передней части от слушателя, где первый канал источника подается в левый громкоговоритель и второй канал источника подается в правый громкоговоритель. Другим форматом источника является объемное звучание 5.1, которое состоит из шести аудиоканалов (L=6), которые предназначены для воспроизведения способом один к одному (то есть без какого-либо поперечного смешения каналов) через пять громкоговорителей и сабвуфер. В случае, когда сигналы источника являются результатом некоторого алгоритма смешения верхних частот (например, алгоритм, который порождает шестиканальный материал с 5.1 объемным звучанием из двухканального стерео записи), мы будем ассоциировать L со множеством каналов в смешанном по верхним частотам материале (то есть в примере смешения по верхним частотам объемного стереозвучания с 5.1), мы будем использовать скорее L=6, чем L=2. В случае смешивания по нижним частотам, когда два либо более из L сигналов источника подаются в тот же самый вход громкоговорителя, мы получим ситуацию подразумеваемой схемы расположения громкоговорителей с менее чем L громкоговорителями.
Как упомянуто выше, в данном документе мы хотели бы создать корректор, которому разрешено использовать громкоговорители системы более свободно. Целью схемы корректора является, тем не менее, сделать характеристики воспроизведения исходной подразумеваемой схемы расположения громкоговорителей настолько эффективными, насколько возможно. Для выполнения этой задачи для каждого одного из L входных сигналов источника будем проводить различия между тем, какой громкоговоритель принадлежит этому конкретному сигналу источника в исходной подразумеваемой схеме расположения громкоговорителей (этот громкоговоритель в дальнейшем называется главным громкоговорителем рассматриваемого сигнала источника), и тем, какие дополнительные громкоговорители (в дальнейшем называемые поддерживающими громкоговорителями) используются корректором для улучшения характеристик главного громкоговорителя.
Предположим, что у нас имеется L входных сигналов источника и система из всего N громкоговорителей. Тогда для каждого из L входных сигналов источника должен быть один ассоциированный главный громкоговоритель. Среди оставшихся N-1 громкоговорителей затем выбираем набор из S поддерживающих громкоговорителей, где 1≤S≤N-1, которые будут использоваться корректором для улучшения характеристик главного громкоговорителя.
Напомним, что если звуковая система представлена моделью матриц переходных функций, как, например, в (1), тогда каждый столбец в H представляет собой акустическую характеристику одного громкоговорителя в М измерительных положениях. Таким образом, один из столбцов H содержит характеристики главного громкоговорителя, и оставшиеся столбцы содержат характеристики S поддерживающих громкоговорителей. Следовательно, в конкретной схеме корректора для одного из L входных источников акустическая модель H содержит 1+S столбцов, и результирующий корректор имеет один вход и 1+S выходов, где 1+S может быть меньше, чем N, в зависимости от того, сколько поддерживающих громкоговорителей было выбрано для этого конкретного входа источника. Также следует отметить, что необходимо использовать тот же самый набор из громкоговорителей повторно, когда корректоры разработаны для оставшихся L-1 входов источника. Число S поддерживающих громкоговорителей, используемых корректором, следовательно, не может быть тем же самым для всех L входов источника.
Определение целевого звукового поля
Целью предварительной коррекции громкоговорителей не является формирование произвольного звукового поля в помещении, но улучшение акустической характеристики в существующем физическом громкоговорителе. Целевое звуковое поле, которое необходимо определить для одного конкретного (из L) входных сигналов источника, следовательно, в значительной степени определяется характеристиками главного громкоговорителя, ассоциированного с этим входным сигналом источника. Последующий пример является иллюстрацией того, как целевое звуковое поле может быть задано для конкретного главного громкоговорителя.
Предположим, что рассматриваемая звуковая система измеряется в М измерительных положениях и представлена с помощью матрицы H переходных функций как в (1). Более того, предположим, что j-й столбец H представляет собой импульсные характеристики рассматриваемого главного громкоговорителя. Тогда целевое звуковое поле может быть задано в виде вектора-столбца M×1 переходных функций D, как в (5). Типично целевое звуковое поле должно быть задано в качестве идеального варианта измеренных импульсных характеристик главного громкоговорителя. Примером того, как подобный идеальный набор импульсных характеристик может быть разработан для использования единичных импульсов с задержкой в качестве элементов в D, то есть чтобы позволить i-му элементу Di из D быть заданным в качестве 
Целевая характеристика в (12) является идеальным вариантом импульсной характеристики главного громкоговорителя в том смысле, что он представляет собой звуковую волну, распространение которой через пространство (то есть по М измерительным положениям) аналогично распространению через главный громкоговоритель, но во временной области форма целевой звуковой волны похожа на импульс и не содержит эха помещения. Задержки Δ1, …, Δм могут быть определены с помощью обнаружения временной задержки, соответствующей первому коэффициенту существенной амплитуды в каждой из импульсных характеристик в j-м столбце H. Дополнительная общая объемная задержка d0 является дополнительной, но должна предпочтительно быть включена, если используется корректор диагональной фазы с задержкой d0, как предложено в (9), (10).
Если существует более одного входного сигнала источника, то есть если L>1, тогда целевое звуковое поле задано для каждого из L источников сигнала, которые воспроизводятся звуковой системой.
Если по какой-либо причине задержки Δ1, …, Δм распространения не могут быть обнаружены должным образом, являются неопределенными либо их сложно определить каким-либо образом, тогда управляемая в некоторой степени вариация может быть представлена в целевой характеристике D. Например, задержки Δ1, …, Δм могут быть регулируемыми в течение заранее определенных границ. Подобная гибкость целевой матрицы может помочь получить лучшую аппроксимацию для выбранной цели, лучшие значения критерия и лучшее воспринимаемое качество звука. Этот тип гибкости может использоваться итерационно при настройке параметров целевой характеристики D и параметров фильтра предварительной коррекции.
Определение критерия оптимизации
Для получения аналитических методик для разработки фильтров предварительной коррекции удобно ввести линейный критерий, который должен быть оптимизирован в отношении настраиваемых параметров. Пример подходящего критерия состоит из суммы либо взвешенной суммы мощностей разницы между целевым сигналом yref(t) и скорректированным сигналом y(t) во всех М измерительных точках. Эта разница впоследствии называется ошибкой аппроксимации либо просто ошибкой и взвешенной ошибкой соответственно, которые представлены

См. уравнения (1), (5) и (8) выше. Взвешенная ошибка z1(t) определяется полиномиальной матрицей V размерности M×M, которая может быть полной матрицей, диагональной матрицей либо просто постоянной матрицей в зависимости то того, какие частотные диапазоны ошибки должны быть выделены. Если V=I, то есть матрица тождественного преобразования, которая является диагональной с единицами по диагонали, тогда к ошибке не применяется никакого взвешивания. Дополнительно взвешенные мощности N выходных сигналов предварительного аудиокорректора, u(t), см. (6), могут быть добавлены к критерию. Взвешенные выходные сигналы предварительного корректора будут в дальнейшем называться элементами выбраковки и представлены с помощью

где W является полиномиальной матрицей размерности N×N. Полиномиальная матрица W может быть полной матрицей, она может быть диагональной матрицей с FIR-фильтрами по диагонали, либо они может быть всего лишь матрицей тождественного преобразования в зависимости от того, как и какие частотные диапазоны сигналов предварительного корректора будут отбракованы. Если не требуется взвешивания отбраковки, тогда WE будет всего лишь матрицей тождественного преобразования.
Если, например, V(q-1) и W(q-1) являются диагональными с диагональными элементами, обозначенными с помощью Vi(q-1) и Wj(q-1), (i=1, …, M; j=1, …, N) соответственно, тогда с помощью элементов z1(t) и z2(t) взвешивания, обозначенных выше, примером адекватного критерия будет
В данном документе статистическое ожидание Е взято в отношении сигнала w(t), тогда как статистическое ожидание 

В качестве примера рассмотрим (15) с V(q-1) и W(q-1), которые являются диагональными с FIR-фильтрами по диагонали. Если все диагональные элементы V(q-1) являются фильтрами нижних частот, это означает, что мы отдаем приоритет высокой точности (малая ошибка) при низких частотах. Аналогичным образом, если элементы W(q-1) являются фильтрами верхних частот, тогда вывод аудиофильтра с предварительной коррекцией высокочастотной составляющей будет отбракован (то есть иметь больший вклад в значение критерия) по сравнению с низкочастотной составляющей. Следовательно, аудиофильтр предварительной коррекции, который стремится минимизировать критерий, прикладывает усилия на нижних частотах. Выбирая различные фильтры для различных ошибочных сигналов и сигналов с предварительной коррекцией, разработчик может балансировать между различными выводами громкоговорителя по отношению друг к другу. В отдельном случае, когда все FIR-фильтры являются одним целым, взвешивание не осуществляется. Взвешивание полиномиальных матриц V(q-1) и W(q-1) таким образом предлагает значительную гибкость в схеме для получения настолько малой ошибки, насколько это возможно в интересующих частотных диапазонах, тогда как в тот же самый момент времени осторожно используют мощность сигнала предварительной коррекции.
Очевидно, что если V(q-1) является диагональной, тогда первая правая сумма критерия (15) представляет собой взвешенное суммирование по М измерительным положениям мощностей разниц между скорректированными оцененными импульсными характеристиками, представленными элементами HR, и целевыми импульсными характеристиками, представленными элементами D, где взвешивание осуществляется с помощью полиномиальной матрицы V(q-1) и с помощью спектральных свойств сигнала w(t). Равное взвешивание всех компонентов вектора e(t) ошибки могло бы быть получено, если используется единичная матрица V(q-1)=I и если сигнал w(t) является белым шумом.
Оптимальная схема контроллера
Критерий (15), который составляет квадратичную 2-норму либо другие виды критериев на основе, например, других показателей, может быть оптимизирован несколькими способами в отношении настраиваемых параметров предварительного корректора R. Также возможно наложить структурные ограничения на предварительный корректор, например требование, чтобы его элементы являлись фильтрами FIR определенных заданных очередностей, и затем осуществлять оптимизацию настраиваемых параметров при этих ограничениях. Подобная оптимизация может осуществляться с помощью адаптивной методики либо с помощью использования способов разработки FIR-фильтров Винера. Тем не менее, так как все структурные ограничения приводят к ограниченному пространству решений, достижимые характеристики будут худшими в сравнении с формулировками задачи без подобных ограничений. Отсюда оптимизация должна предпочтительно осуществляться без структурных ограничений предварительного корректора, исключая зависимость предварительного корректора и стабильность скорректированной системы. С проблемой оптимизации, изложенной выше, проблема становится проблемой ЛКГ-схемы (линейно-квадратичная гауссовская, LQG) для многопеременного корректора R с прямой связью.
Линейно-квадратичная теория предусматривает оптимальные линейные контроллеры либо предварительные корректоры для линейных системы и квадратичных критериев, см., например, (1, 19, 20, 31). Если допускается, что включаемые сигналы являются гауссовскими, тогда предварительный LQG-корректор, полученный с помощью оптимизации критерия (15), может быть показан как оптимальный не только среди всех линейных контроллеров, но также среди всех нелинейных контроллеров, см., например, (1). Отсюда оптимизация критерия (15) в отношении настраиваемых параметров R, при ограничении зависимости R и стабильности скорректированной системы HR, является довольно общей. С допущением стабильности H и D стабильность скорректированной системы либо оператор переноса ошибки, D-HR, таким образом, эквивалентен стабильности контроллера R.
Теперь представим LQG-оптимальный предварительный корректор для проблемы, заданной уравнениями (1)-(14) и критерием (15). Решение указано в операторе переноса либо в виде переходной функции, используя полиномиальные матрицы. Методики для извлечения подобных решений представлены, например, в (31). Альтернативно решение может быть извлечено с помощью методик пространства состояний и решения уравнений Риккати, см., например, (1, 20).
Уравнения схемы полиномиальной матрицы для оптимизации предварительных корректоров
Позволим описать систему с помощью модели (1) с помощью H, параметризованной как в (3) и в (4). Если не используется моделирование неопределенности, тогда установим ΔВ=0 и получим H=B0A0 -1=BA-1. Более того, допустим, что целевое звуковое поле в М измерительных положениях будет представлено с помощью D=D/E, то есть
где E(q-1) либо равно единице либо является скалярным полиномом минимальной фазы.
Если необходимы максимально достижимые характеристики корректора при ограничении, что необходимо избегать искусственных признаков предварительных вызовов, тогда коррекция отдельной фазы и синхронизация временной задержки включенных громкоговорителей предпочтительно осуществляется до оптимизации предварительного корректора. Такие корректировки фазы могут быть разработаны согласно принципам, описанным в (5), (6). Для того чтобы достичь максимальных характеристик во время ограничения решения, не нужно включать какие-либо искусственные признаки предварительного вызова, всечастотный фильтр 
где, по меньшей мере, один из полиномов 
Представим полиномиальную матрицу 
В данном документе diag(•) обозначает диагональную матрицу с элементами вектора по диагонали, (•)T обозначает транспонирование того же самого вектора, тогда как 

Как объясняется выше, d0 в (18) является заданной первоначальной задержкой системы с корректированной фазой, тогда как dj, j=1, …, N являются отдельными задержками, которые могут использоваться для настройки отдельных отклонений в расстояниях среди различных громкоговорителей. Так как


где 


При заданной выше системе 


где полиномиальная матрица N|N β(q-1) является однозначно определяемым постоянным правым спектральным коэффициентом (Подобный правый спектральный коэффициент существует при нежестких условиях для текущей проблемы. См. раздел 3.3. (31). Спектральный коэффициент является однозначным для ортогональной матрицы.), заданным с помощью

и полиномиальная матрица Q(q-1), вместе с полиномиальной матрицей L*(q), обе размерностью N|1 составляет однозначное решение для двустороннего уравнения Диофанта

с характерными (меньшие степени могут иметь место в отдельных случаях) степенями
Оптимальность и уникальность корректора, производимого выше, может быть доказана использованием методик, представленных в (27, 31). Решение, представленное выше, может быть легко расширено, чтобы принять во внимание w(t), которое описано с помощью динамической модели, то есть
где v{t) является единичной дисперсией нулевого среднего значения последовательности с белым шумом. Если в качестве примера 
Схема фильтра, представленная выше, может также использоваться для разработки набора фильтров 


Для того чтобы получить сигнал предварительного корректора 


Следует отметить, что если не осуществляется никакой коррекции отдельной фазы в каждом из N громкоговорителей, тогда 



В практической схеме контроллера третий член в правой части уравнения (21) легко получается с помощью оценки, см. (26, 27, 32),

Теперь напомним, что случайные коэффициенты конкретных полиномиальных элементов ΔВ заданы в качестве среднего нулевого значения, единичных дисперсий последовательностей белого шума, подразумевая, что 



и, таким образом, выражением для 

Важной идеей в данном документе является то, что из-за диагональной структуры взвешенных значений ошибки
Последующая обработка спектра сбалансированной амплитуды
Когда звуковая система является воспроизводящей музыку, главным образом является предпочтительным, чтобы спектр амплитуды переходных функций системы являлся гладким и хорошо сбалансированным, по меньшей мере, средним по области прослушивания. Если скорректированная система совершенным образом получает желаемую целевую характеристику D во всех положениях, тогда средняя амплитудная характеристика скорректированной системы будет равна целевой характеристике. Тем не менее, так как нельзя ожидать, чтобы необходимый контроллер R полностью достигал целевой характеристики D во всех частотах, например, из-за очень сложной реверберации помещения, которую нельзя полностью скорректировать, всегда будут существовать остаточные ошибки аппроксимации в скорректированной системе. Эти ошибки аппроксимации могут иметь различную амплитуду в различных частотах, и они могут влиять на качество воспроизводимого звука. Несовершенство амплитудной характеристики в целом нежелательно, и матрица контроллера должна предпочтительно настраиваться так, чтобы общая целевая амплитудная характеристика достигалась в среднем во всех областях прослушивания.
Конечный этап схемы, следовательно, добавляется после минимизации критерия с целью настройки характеристики контроллера так, чтобы в среднем целевая амплитудная характеристика была достаточно хорошо аппроксимирована в среднем по всем измерительным положениям. С этой целью амплитудные характеристики общей системы (то есть система, включающая в себя контроллер R) могут оцениваться в различных положениях прослушивания, на основе моделей схемы либо на основе новых измерений. Фильтр с минимальной фазой может быть затем спроектирован так, чтобы в среднем (в смысле среднеквадратичного отклонения, RMS) целевая амплитудная характеристика достигалась во всех областях прослушивания. В качестве примера может использоваться переменное частичное октавное сглаживание на основе изменений пространственной характеристики для того, чтобы компенсировать в большей степени в конкретной частотной области. Результатом является один скалярный фильтр эквалайзера, который настраивает все элементы R с помощью одинаковой величины.
Иллюстративный пример
Примером работы предложенной схемы предварительного корректора и его отличие от традиционной одноканальной схемы показано на фиг. 6-11:
- Фиг. 6 и фиг. 9 показывают частотные характеристики и среднее кумулятивное спектральное затухание ("каскадная диаграмма"), соответственно, громкоговоритель АТС SCM16 студийного монитора, измеряемого в 64 положениях в помещении.
- Фиг. 7 и фиг. 10 показывают частотные характеристики и, соответственно, среднюю каскадную диаграмму того же громкоговорителя после того, как использовался одноканальный предварительный корректор для входа в громкоговоритель.
- Фиг. 8 и фиг. 11 показывают частотные характеристики и среднюю каскадную диаграмму, когда использовался новый способ с многоканальной схемой. Целью схемы корректора являлось в данном документе то же самое, что и для одноканальной схемы фиг. 7 и фиг. 10, то есть единственный громкоговоритель предыдущих фигур использовался в качестве главного громкоговорителя, и целью являлось создание характеристики этого главного громкоговорителя настолько идеальной, насколько возможно. Для того чтобы лучше достичь этой цели, использовалось дополнительно 15 громкоговорителей в качестве поддерживающих громкоговорителей. Поддерживающие громкоговорители окружали область прослушивания, где производились измерения, и они располагались на различной высоте и на различном расстоянии от области прослушивания.
Реализация фильтра
Результирующий фильтр R (20) может быть реализован любыми способами, в виде пространства состояний в виде переходной функции. Необходимые фильтры в целом являются фильтрами очень высокого порядка, в частности, если используется полная скорость выборки звукового диапазона и также, если в модели принята во внимание динамика акустики помещения, на которой основана схема. Для того чтобы достичь вычислительно реализуемой схемы, интересны способы для ограничения вычислительной сложности предварительного корректора. Выделим в данном документе один способ для этой цели, которая основана на снижении порядка контроллера элементов матрицы R контроллера, в частности, любых переходных функций, которые имеют импульсные характеристики с очень длинными, но сглаженными хвостовыми частями. Способ работает следующим образом.
Релевантные скалярные элементы R1, …, RN импульсной характеристики предварительного корректора R сперва представлены как очень длинные FIR-фильтры, как упомянуто выше. Затем для каждой импульсной характеристики Rj для каждого предварительного корректора выполнить следующее:
1. Определить задержку t1>1, после которой импульсная характеристика приблизительно экспоненциально затухает и имеет сглаженную форму, и вторая задержка t2>t1, после которой коэффициенты импульсной характеристики являются пренебрежимо малыми.
2. Использовать понижение модели либо методику системной идентификации для настройки рекурсивного IIR-фильтра низкого порядка для аппроксимации хвостовой части FIR-фильтра для интервала (t1, t2) задержки.
3. Реализовать аппроксимированный скалярный фильтр предварительного корректора в качестве параллельного соединения 

Целью этой процедуры является получение вариантов реализации, в которых сумма множества параметров в FIR-фильтре M(q-1) и IIR-фильтре N(q-l) намного ниже, чем исходное число коэффициентов импульсной характеристики. Могут использоваться совершенно различные способы для аппроксимации хвостовой части импульсной характеристики, например настройка авторегрессионных моделей для ковариационной последовательности на основе уравнений Юла-Уолкера. Для того чтобы получить низкую количественную чувствительность к окружающим ошибкам коэффициентов, когда реализуют итоговые IIR-фильтры с конечной арифметической точностью, желательно, чтобы их реализовали в качестве параллельных соединений либо последовательности соединений фильтров меньшего порядка. В качестве примера могут использоваться фильтры первого порядка либо элементы IIR-фильтра второго порядка (так называемые биквадратичные фильтры).
Аспекты реализации
Типично методика проектирования выполняется в компьютерной системе для создания параметров фильтра для фильтра предварительной коррекции. Вычисленные параметры фильтра затем обычно загружаются в цифровой фильтр, например, реализованный с помощью системы цифровой обработки сигнала либо аналогичной компьютерной системе, которая выполняет фактическое фильтрование.
Хотя изобретение может быть реализовано в программном обеспечении, аппаратном обеспечении, встроенном программном обеспечении либо в любом его сочетании, схема разработки фильтра, предложенного изобретением, предпочтительно реализована в качестве программного обеспечения в виде программных модулей, функций либо эквивалента. Программное обеспечение может быть записано на любом типе компьютерного языка, например, C, C++ либо даже специализированных языках для цифровых сигнальных процессоров (DSP). На практике релевантные этапы, функции и действия изобретения сопоставляются с компьютерной программой, которые при исполнении компьютерной системой выполняют вычисления, ассоциированные со схемой фильтра предварительной коррекции. В случае системы на базе ПК компьютерная программа, используемая для схемы либо определения аудиофильтра предварительной коррекции, обычно кодируется на машиночитаемом носителе, например, универсальном цифровом диске (DVD), компакт-диске (CD) либо аналогичной структуре для распространения пользователю/разработчику фильтра, которые затем могут загрузить программу в его/ее компьютерную систему для последующего исполнения. Программное обеспечение может быть даже загружено из удаленного сервера через Интернет.
Таким образом, предоставлена система и соответствующий компьютерный программный продукт для определения контроллера предварительной коррекции аудио для ассоциированной звуковой системы, содержащей в общем N≥2 громкоговорителей, у каждого громкоговорителя имеется вход громкоговорителя, где контроллер предварительной коррекции аудио имеет множество из L≥1 входов для L входных сигналов и N выходов для N выходных сигналов контроллера, один для каждого громкоговорителя системы формирования звука. Принимая во внимание, что контроллер предварительной коррекции аудио имеет множество настраиваемых параметров фильтра, которые необходимо определить. Система в основном содержит средство для оценки для каждого одного из, по меньшей мере, подмножества N входов громкоговорителей, импульсная характеристика в каждом из множества M≥2 измерительных положений, распределенная в интересующей области в среде прослушивания, была основана на измерениях звука в М измерительных положениях. Система также содержит средство для определения для каждого из L входных сигналов, один громкоговоритель, выбранный из N громкоговорителей в качестве главного громкоговорителя, и выбранное подмножество S, включающее в себя, по меньшей мере, один из N громкоговорителей в качестве поддерживающих громкоговорителей, где главный громкоговоритель не является частью подмножества. Система дополнительно содержит средство для определения для каждого из главных громкоговорителей целевой импульсной характеристики в каждом из М измерительных положений с целевой импульсной характеристикой, которая имеет задержку в распространении звука, где задержка в распространении звука определяется на основе расстояния от главного громкоговорителя к соответствующим измерительным положениям. Система также содержит средство для определения для каждого из L входных сигналов на основе выбранного главного громкоговорителя и выбранного поддерживающего громкоговорителя(ей) параметров фильтра контроллера предварительной коррекции аудио так, чтобы критериальная функция оптимизировалась при ограничении стабильности динамики контроллера предварительной коррекции аудио. Критериальная функция определена как включающая в себя взвешенное суммирование разниц мощностей между скорректированными оцененными импульсными характеристиками и целевыми импульсными характеристиками по М измерительным положениям.
Для случая, где L≥2, система может также включать в себя средство для объединения всех параметров фильтра, определенных для L входных сигналов контроллера, в объединенный набор параметров фильтра для контроллера предварительной коррекции аудио. Контроллер предварительной коррекции аудио с объединенным набором параметров фильтра затем конфигурируется для работы по L входным сигналам для формирования N выходных сигналов контроллера в громкоговорителях для получения желаемых целевых импульсных характеристик.
В конкретном примере средство для определения параметров фильтра контроллера предварительной коррекции аудио выполнено с возможностью работы на основе ЛКГ-оптимизации (линейно-квадратичная гауссовская, LQG) параметров постоянного, линейного, зависимого контроллера с многопеременной прямой связью на основе указанной целевой динамической системы и динамической модели системы формирования звука.
Компьютерный программный продукт содержит соответствующее программное средство и выполнен с возможностью определения контроллера предварительной коррекции аудио во время выполнения в компьютерной системе.
Фиг. 4 является схематичной блок-схемой, иллюстрирующей примерную компьютерную систему, подходящую для реализации алгоритма разработки фильтра согласно изобретению. Система 100 разработки фильтра может быть реализована в виде любой традиционной компьютерной системы, включая персональные компьютеры (PC), универсальные вычислительные машины, многопроцессорные системы, сетевые персональные компьютеры, цифровые сигнальные процессоры (DSP) и тому подобное. В любом случае система 100 в основном содержит центральный процессор (CPU) либо ядро 10 цифрового сигнального процессора (DSP), системную память 20 и системную шину 30, которая взаимодействует с различными системными компонентами. Системная память 20 типично включает в себя постоянное запоминающее устройство 22 (ROM) и оперативное запоминающее устройство 24 (RAM). Кроме того, система 100 обычно содержит одно либо более периферийных запоминающих устройств 40, управляемых накопителями, например накопители на жестких дисках, магнитные диски, оптические диски, гибкие диски, цифровые видеодиски либо карты памяти, предоставляющие энергонезависимую память для данных и программной информации. Каждое периферийное запоминающее устройство 40 обычно ассоциируется с флэш-накопителем для управления запоминающим устройством, а также интерфейс накопителя (не проиллюстрирован) для соединения запоминающего устройства 40 с системной шиной 30. Программа разработки фильтра, реализующая алгоритм разработки согласно изобретению, возможно, вместе с другими релевантными программными модулями может сохраняться в периферийном запоминающем устройстве 40 и может быть загружена в RAM 24 системной памяти 20 для выполнения CPU 10. При заданных релевантных входных данных, например измерениях, входные спецификации и, возможно, представление модели и другие дополнительные конфигурации, программа разработки фильтра вычисляет параметры фильтра для контроллера предварительной коррекции аудио/фильтра.
Определенные параметры фильтра затем обычно передаются из RAM 24 в системной памяти 20 через интерфейс 70 ввода-вывода системы 100 в контроллер 200 предварительной коррекции аудио. Предпочтительно, чтобы контроллер 200 предварительной коррекции аудио был основан на цифровом сигнальном процессоре (DSP) либо аналогичном центральном процессоре 202 (CPU) и одном либо более модулях 204 запоминающего устройства для сохранения параметров фильтра и необходимых выборок задерживаемого сигнала. Запоминающее устройство 204 обычно также включает в себя программу фильтрования, которая при выполнении процессором 202 осуществляет фактическое фильтрование на основе параметров фильтра.
Вместо передачи вычисленных параметров фильтра непосредственно в контроллер 200 предварительной коррекции аудио через систему 70 ввода/вывода параметры фильтра могут быть сохранены на периферийной карте памяти либо диске 40 запоминающего устройства для дальнейшей передачи в контроллер предварительной коррекции аудио, который может быть либо не быть удаленно расположенным от системы 100 проектирования фильтра. Вычисленные параметры фильтра могут быть также загружены из удаленного места, например, через Интернет и в дальнейшем предпочтительно в зашифрованном виде.
Для того чтобы разрешить измерения звука, порождаемого рассматриваемым звуковым оборудованием, любой традиционный блок(и) микрофона либо аналогичное записывающее оборудование может быть соединено с компьютерной системой 100, типично через аналогово-цифровой преобразователь (A/D). На основе измерений (традиционных) тестовых аудиосигналов, выполненных блоком микрофона, система 100 может развивать модель аудиосистемы, используя прикладную программу, загружаемую в системную память 20. Измерения могут также использоваться для оценки характеристик комбинированной системы фильтра предварительной коррекции и звукового оборудования. Если разработчик не удовлетворен целевой схемой, он может начать новую оптимизацию фильтра предварительной коррекции на основе модифицированного набора параметров схемы.
Кроме того, у системы 100 типично есть пользовательский интерфейс 50, чтобы сделать возможным взаимодействие пользователя с разработчиком фильтра. Возможно несколько различных сценариев взаимодействия с пользователем.
Например, разработчик фильтра может решить, что он/она желает использовать определенный, специализированный набор параметров схемы при вычислении параметров фильтра контроллера 200 предварительной коррекции аудио. Разработчик фильтра затем определяет релевантные параметры схемы через пользовательский интерфейс 50.
Для разработчика фильтра также возможно для выбора между набором различных предварительно сконфигурированных параметров, которые могут быть спроектированы для различных аудиосистем, сред прослушивания и/или для цели внедрения специальных характеристик в результирующий звук. В таком случае предварительно конфигурируемые варианты обычно сохраняются в периферийном запоминающем устройстве 40 и загружаются в системную память во время исполнения программы со схемой фильтра.
Разработчик фильтра может также задавать опорную систему, используя пользовательский интерфейс 50. Вместо определения системной модели на основе измерений микрофона для первого разработчика также возможно выбрать модель аудиосистемы из набора различных предварительно конфигурируемых системных моделей. Предпочтительно, чтобы выбор был основан на конкретном звуковом оборудовании, с которым используется результирующий фильтр предварительной коррекции. Другим вариантом является разработка набора фильтров для выбранного подходящего набора взвешенных матриц, чтобы иметь возможность изменять степень поддержки, предоставляемую выбранным набором поддерживающих громкоговорителей.
Предпочтительно, чтобы аудиофильтр был реализован вместе с системой формирования звука так, чтобы позволить воспроизведение звука, на который воздействует фильтр.
В альтернативном варианте осуществления схема фильтра осуществляется более либо менее автономно без либо лишь с незначительным участием пользователя. Теперь будет описан пример подобной конструкции. Примерная система содержит организующую программу, программное обеспечение для идентификации системы и программное обеспечение схемы фильтра. Предпочтительно, чтобы организующая программа сначала формировала тестовые сигналы и измеряла результирующие акустические характеристики аудиосистемы. На основе тестовых сигналов и полученных измерений программное обеспечение для идентификации системы определяет модель аудиосистемы. Организующая программа затем собирает и/или формирует необходимые параметры схемы и направляет эти параметры схемы в первую программу схемы фильтра, которая вычисляет параметры аудиофильтра предварительной коррекции. Организующая программа может затем, в качестве варианта, оценить характеристики результирующей схемы по измеряемому сигналу и, если необходимо, дать команду программе схемы фильтра определить новый набор параметров фильтра на основе модифицированного набора параметров схемы. Процедура может повторяться до тех пор, пока не будет получен удовлетворительный результат. Затем загружается/реализуется целевой набор параметров фильтра в контроллер предварительной коррекции аудио.
Также возможно адаптивно корректировать параметры фильтра предварительной коррекции вместо использования фиксированного набора параметров фильтра. Во время использования фильтра в аудиосистеме звуковые условия могут измениться. Например, положение громкоговорителей и/или объектов, например мебель в среде прослушивания, может измениться, что в свою очередь может повлиять на акустику помещений, и/или некоторое оборудование в аудиосистеме может быть заменено на некоторое другое оборудование, что приводит к различным характеристикам общей аудиосистемы. В подобном случае продолжительные либо периодические измерения звука из аудиосистемы в одном либо нескольких положениях в среде прослушивания может осуществляться с помощью одного либо более блоков микрофона, возможно, соединенного беспроводным способом либо аналогичной аппаратурой звукозаписи. Записанные звуковые данные могут затем подаваться, возможно, беспроводным способом в систему со схемой фильтра, которая вычисляет новую модель аудиосистемы и настраивает параметры фильтра так, чтобы они были лучше адаптированы для новых аудиоусловий.
Естественно, что изобретение не ограничено компоновкой фиг. 4. В качестве альтернативного варианта как фильтр предварительной коррекции, так и фактическая реализация фильтра могут быть реализованы в одной и той же компьютерной системе 100 либо 200. В целом это означает, что программа схемы фильтра и программа фильтрования реализованы и исполняются в том же самом DSP либо микропроцессорной системой.
Контроллер предварительной коррекции аудио может быть реализован в качестве отдельного оборудования в цифровом сигнальном процессоре либо компьютере, у которого имеется аналоговый либо цифровой интерфейс для последовательных усилителей, как упомянуто выше. Альтернативно он может быть интегрирован в конструкцию цифрового предусилителя, автомобильную аудиосистему, аудиосистему домашнего кинотеатра, аудиосистему концертного зала, компьютерную звуковую карту, компактную стереосистему, домашнюю аудиосистему, компьютерную игровую консоль, телевизор, стыковочный узел для MP3-проигрывателя, звуковую панель либо любое другое устройство либо систему, нацеленную на создание звука. Также возможно реализовать фильтр предварительной коррекции более ориентированным на аппаратное обеспечение способом, с помощью структур настраиваемого вычислительного аппаратного обеспечения, например, программируемых пользователем вентильных матриц (FPGA) либо специализированных интегральных схем (ASIC).
В конкретном примере контроллер предварительной коррекции аудио реализован в качестве линейного стабильного зависимого контроллера с прямой связью.
Следует понимать, что предварительная коррекция может быть осуществлена отдельно от распространения звукового сигнала в фактическое место воспроизведения. Сигнал предварительной коррекции, сформированный фильтром предварительной коррекции, не обязательно должен распространяться мгновенно и через прямое подключение к системе формирования звука, но может записываться на отдельный носитель для последующего распространения в системе формирования звука. Сигнал корректировки может тогда представлять, например, записанную музыку на компакт-диске либо универсальном цифровом диске, которая настраивается для конкретного оборудования аппаратуры и среды прослушивания. Он также может быть предварительно скорректированным звуковым файлом, сохраненным на Интернет-сервере, чтобы дать возможность для последующей загрузки файла для удаленного места по Интернету.
Вышеописанные варианты осуществления следует рассматривать как несколько иллюстративных примеров настоящего изобретения. Специалисты в данной области техники должны понимать, что различные модификации, комбинации и изменения могут быть выполнены в вариантах осуществления без отступления от области применения настоящего изобретения. В частности, решения по различным частям в различных вариантах осуществления могут быть объединены в другие конфигурации, если технически возможно. Объем настоящего изобретения, тем не менее, задается прилагаемой формулой изобретения.
Библиографический список
(1) В.D.O. Anderson and J.B. Moore. Optimal Control, Linear Quadratic Methods. Prentice- Hall, Englewood Cliffs, NJ, 1990 (Д.О. Андерсон и Дж. Б. Мур. Оптимальное управление, линейно-квадратические способы. Прентис Холл, Энглвуд Клифс, Нью-Джерси, 1990 г.).
(2) J. Bauck and D.H. Cooper. Generalized transaural stereo and applications. Journal of the Audio Engineering Society, 44(9):683-705, September 1996. (Дж. Бок и Д.Х. Купер. Обобщенное трансакустическое стерео и приложения. Журнал Общества инженеров по звуковой технике, 44(9): 683-705, сентябрь 1996 г.).
(3) S. Bharitkar and C. Kyriakakis. Phase equalization for multi-channel loudspeaker-room responses. US Patent US 7720237 (С. Бариткар и К. Кириакакис. Фазовое выравнивание для характеристик помещения с многоканальными громкоговорителями. Патент США 7720237).
(4) L.-J. Brännmark. Robust audio precompensation with probabilistic modeling of transfer function variability. In IEEE Workshop on Applications of Signal Processing to Audio and Acoustics, WASPAA'09, Proceedings, pages 193-196, New Paltz, NY, October 2009 (Л.-Дж. Бренмарк. Надежная предварительная аудиокоррекция с вероятностным моделированием вариации переходной функции. В рабочей группе IEEE (инженеры по электротехнике и электронике) по приложениям сигнальной обработки для аудио и акустики, материалы конференции WASPAA'09, страницы 193-196, Нью-Палц, Нью-Йорк, октябрь 2009 г.).
(5) L.-J. Brännmark and A. Ahlén. Spatially robust audio compensation based on SIMO feedforward control. IEEE Transactions on Signal Processing, 57(5), May 2009 (Л.-Дж. Бренмарк и А. Аллен. Надежная аудиокоррекция в пространстве на основе SIMO-управления (один вход со многими выходами) с прямой связью. Протоколы IEEE по обработке сигналов, 57(5), май 2009 г.).
(6) L.-J. Brannmark, M. Stemad, and A. Ahlén. Spatially robust audio precompensation. European Patent EP 2104374 (Л.-Дж. Бренмарк, М. Стемад и А. Аллен. Надежная предварительная аудиокоррекция в пространстве. Европейский патент EP 2104374).
(7) A. Celestinos and S. Birkeda1 Nielsen. Time based room correction system for low frequencies using multiple loudspeakers. Presented at the AES 32nd International Conference: DSP for Loudspeakers, September 2007 (А. Селестинос и С. Биркедал Нильсен. Система коррекции помещений на основе времени для низких частот с использованием многочисленных громкоговорителей. Представлено на 32-ой международной конференции AES (Общество инженеров по звуковой технике): DSP для громкоговорителей, сентябрь 2007 г.).
(8) A. Celestinos and S. Birkedal Nielsen. Controlled acoustic bass system (CABS) A method to achieve uniform sound field distribution at low frequencies in rectangular rooms. J. Audio Eng. Soc, 56(11):915-931, 2008 (А. Селестинос и С. Биркедал Нильсен. Управляемая акустическая басс-система (CABS). Способ для достижения единообразного распространения звукового поля при низких частотах в прямоугольных помещениях. Журнал Общества инженеров по звуковой технике, 56(11):915-931, 2008 г.).
(9) E. Corteel. Equalization in an extended area using multichannel equalization and wave field synthesis. Journal of the Audio Engineering Society, 54(12):1140-1161, December 2006.(Е. Кортил. Выравнивание в расширенной области, используя синтез многоканального выравнивания и звуковой волны. Журнал Общества инженеров по звуковой технике, 54(12):1140-1161, декабрь 2006 г.).
(10) J. Daniel, R. Nicol, and S. Moreau. Further investigations of high order ambisonics and wavefield synthesis for holophonic sound imaging (Дж. Даниель, Р. Николь и С. Моро. Дополнительные исследования амбиофонии высокого порядка и синтеза звуковых волн для голофонического акустического изображения. Представлено на 114-ой конференции, Амстердам, препринт 5788). Общество инженеров по звуковой технике, март 2003 г.
(11) S.J. Elliott, I.M. Stothers, and P.A. Nelson. A multiple error LMS algorithm and its application to the active control of sound and vibration (С.Дж. Эллиот, И. М. Стотерс и П.А. Нельсон. LMS-алгоритм с многочисленными ошибками и его применение для активного управления звуком и вибрацией). Протоколы IEEE по акустике, обработке речи и сигналов, 35(10):1423-1434, октябрь 1987 г.).
(12) F. M. Fazi, P. A. Nelson, J. E. N. Christensen, and J. Seo. Surround system based on three dimensional sound field reconstruction. Presented at AES 125th Convention, San Francisco. Preprint 7555. Audio Engineering Society, October 2008 (Ф.М. Фаци, П.А. Нельсон, Дж.Е.Н. Кристенсен и Дж. Сео. Система объемного звучания на основе воспроизведения трехмерного звукового поля. Представлено на 125-ой конференции AES (общество инженеров по звуковой технике), Сан-Франциско. Препринт 7555. Общество инженеров по звуковой технике, октябрь 2008 г.).
(13) L.D. Fielder. Analysis of traditional and reverberation-reducing methods of room equal¬ization. Journal of the Audio Engineering Society, 51(l/2):3-26, January/February 2004 (Л.Д. Филдер. Анализ традиционных и снижающих реверберацию способов акустического выравнивания помещения. Журнал общества инженеров по звуковой технике, 51(l/2):3-26, январь/февраль 2004 г.).
(14) P. Hatziantoniou and J. Mouijopoulos. Errors in real-time room acoustics dereverberation. Journal of the Audio Engineering Society, 52(9):883-899, September 2004 (П. Хатциантонио и Дж. Моиджопоулос. Ошибки дереверберации акустики помещений в реальном времени. Журнал общества инженеров по звуковой технике, 52(9):883-899, сентябрь 2004 г.).
(15) T. Kailath. Linear Systems. Prentice-Hall, Englewood Cliffs, NJ, 1980 (Т. Кайлат. Линейные системы. Прентис Хол, Энглвуд Клифс, Нью-Джерси, 1980 г.).
(16) M. Karjalainen, A. Makivirta, P. Antsalo, and V. Valimaki. Method for designing a modal equalizer for a low frequency sound reproduction. US Patent US 7742607 (М. Карьялайнен, А. Макивирта, П. Антсало и В. Валимаки. Способ для проектирования модального выравнивателя для воспроизведения звука низких частот. Патент США 7742607).
(17) M. Karjalainen, T. Paatero, J. Mouijopoulos, and P. Hatziantoniou. About room response equalization and dereverberation. In IEEE Workshop on Applications of Signal Processing to Audio and Acoustics, WASPAA '05, Proceedings, pages 183-186, New Paltz, NY, October 2005 (М. Карьялайнен, Т. Паатеро, Дж. Моиджопоулос и П. Хатциантонио. О выравнивании характеристики помещения и дереверберации. В рабочей группе IEEE по приложениям сигнальной обработки для звука и акустики, WASPAA '05, материалы конференции WASPAA '05, страницы 183-186, Нью-Палц, Нью-Йорк, октябрь 2005 г.).
(18) M. Kolundžija, C. Faller, and M. Vetterli. Reproducing sound fields using MIMO acoustic channel inversion (М. Колунджия, С. Фоллер и М. Веттерли. Воспроизведение звуковых полей с использованием MIMO-инверсии акустических каналов. Журнал общества инженеров по звуковой технике, 59(10):721-734, октябрь 2011 г.).
(19) V. Kucera. Analysis and Design of Discrete Linear Control Systems. Academia, Prague, 1991 (В. Кусера. Анализ и схема дискретных линейных систем управления. Академия, Прага, 1991 г.).
(20) H. Kwakemaak and R. Sivan. Linear Optimal Control Systems. Wiley, New York, 1972 (Х. Квакемаак и Р. Сиван. Линейно-оптимальные системы управления. Вили, Нью-Йорк, 1972 г.).
(21) A. Makivirta, P. Antsalo, M. Karjalainen, and V. Valimaki. Modal equalization of loudspeaker-room responses at low frequencies. J. Audio Eng. Soc, 51(5):324-343, 2003 (А. Макивирта, П. Антсало, М. Карьялайнен и В. Валимаки. Модальное выравнивание характеристик помещения с громкоговорителями при низких частотах. Журнал общества инженеров по звуковой технике, 51(5):324-343, 2003 г.).
(22) M. Miyoshi and Y. Kaneda. Inverse filtering of room acoustics. IEEE Transactions on Acoustics, Speech and Signal Processing, 36(2):145-152, February 1988 (М. Мийоши и Й. Канеда. Обратное фильтрование акустики помещения. Протоколы IEEE по акустике, обработке речи и сигнала, 36(2):145-152, февраль 1988 г.).
(23) S.T. Neely and J.B. Allen. Invertibility of a room impulse response. The Journal of the Acoustical Society of America, 66(1):165-169, July 1979 (С.Т. Нили и Дж.Б. Аллен. Обратимость импульсной характеристики помещения. Журнал общества инженеров по звуковой технике, 66(1):165-169, июль 1979 г.).
(24) P.A. Nelson, O. Kirkeby, and T. Takeuchi. Sound fields for the production of virtual acoustic images. Journal of Sound and Vibration, 204(2):386-396, July 1997 (П.А. Нельсон, О. Кикеби и Т. Такеучи. Звуковые поля для создания виртуальных акустических изображений. Журнал по звуку и вибрациям, 204(2) :386-396, июль 1997г.).
(25) P.A. Nelson, F. Orduna-Bustamante, D. Engler, and H. Hamada. Experiments on a system for the synthesis of virtual acoustic sources. Journal of the Audio Engineering Society, 44(11):990-1007, November 1996 (П.А. Нельсон, Ф. Ордуна-Бустаманте, Д. Энглер и Х. Хамада. Эксперименты в системе по синтезу виртуальных акустических источников. Журнал общества инженеров по звуковой технике, 44(11):990-1007, ноябрь 1996 г.).
(26) K. Öhrn. Design of Multivariable Cautious Discrete-Time Wiener Filters: A Probabilistic Approach. PhD thesis, Uppsala University, Sweden, 1996 (К. Орн. Схема продуманных дискретных по времени фильтров Винера со многими переменными: вероятностный подход. Докторская диссертация, университет Уппсалы, Швеция, 1996 г.).
(27) К. Öhrn, A. Ahlen, and M. Stemad. A probabilistic approach to multivariable robust fil¬tering and open-loop control. IEEE Transactions on Automatic Control, 40(3):405-418, March 1995 (К. Орн, А. Аллен и М. Стемад. Вероятностный подход к многопеременному надежному фильтрованию и управлению в разомкнутом контуре. Протоколы IEEE по автоматическому управлению, 40(3):405-418, март 1995 г.).
(28) M.A. Poletti. Three-dimensional surround sound systems based on spherical harmonics. Journal of the Audio Engineering Society, 53(11):1004-1025, November 2005 (М.А. Полетти. Трехмерные системы объемного звучания на основе сферической гармоники. Журнал общества инженеров по звуковой технике, 53(11):1004-1025, ноябрь 2005 г.).
(29) S. Spors, H. Buchner, R. Rabenstein, and W. Herbordt. Active listening room compensation for massive multichannel sound reproduction systems using wave-domain adaptive filtering. The Journal of the Acoustical Society of America, 122(l):354-369, July 2007 (С. Спорс, Х. Бачнер, Р. Рабенстейн и У. Херборд. Активная коррекция помещения для прослушивания для масштабных многоканальных систем воспроизведения звука с использованием адаптивной фильтрации волновой области. Журнал американского акустического общества, 122(l):354-369, июль 2007 г.).
(30) S. Spors, R. Rabenstein, and J. Ahrens. The theory of wave field synthesis revisited. Presented at AES 124th Convention, Amsterdam. Preprint 7358. Audio Engineering Society, May 2008 (С. Спорс, Р. Рабенстейн и Дж. Аренс. Пересмотренная теория синтеза волнового поля. Представлена на 124-ой конференции общества инженеров по звуковой технике, Амстердам. Препринт 7358. Общество инженеров по звуковой технике, май 2008 г.).
(31) M. Stemad and A. Ahlén. LQ controller design and self-tuning control. In K. Hunt, editor, Polynomial Methods in Optimal Control and Filtering, pages 56-92. Peter Peregrinus, London, UK, 1993 (М. Стемад и А. Аллен. Схема LQ-контроллера и управление самостоятельной настройкой. В издании "Полиномиальные способы в оптимальном управлении и фильтровании" под ред. К. Ханта, стр. 56-92. Петер Перегринус, Лондон, Великобритания, 1993 г.).
(32) M. Sternad and A. Ahlén. Robust filtering and feedforward control based on probabilistic descriptions of model errors. Automatica, 29(3):661-679,1993 (М. Стернад и А. Аллен. Надежное фильтрование и управление прямой связью на основе вероятностных описаний ошибок модели. Автоматика, 29(3):661-679, 1993 г.).
(33) I. Vanderkooy. Multi-source room equalization: Reducing room resonances. Presented at AES 123rd Convention, New York. Preprint 7262. Audio Engineering Society, October 2007 (И. Вандеркуй. Выравнивание помещения со многими источниками: Снижение резонансов помещения. Представлено на 123-й конференции Общества инженеров по звуковой технике, Нью-Йорк. Препринт 7262. Общество инженеров по звуковой технике, октябрь 2007 г.).
(34) T. Welti and A. Devantier. Low-frequency optimization using multiple subwoofers. J. Audio Eng. Soc, 54(5):347-364, 2006 (Т. Велти и А. Девантье. Оптимизация низких частот с использованием многочисленных сабвуферов. Журнал Общества инженеров по звуковой технике, 54(5):347-364, 2006 г.).
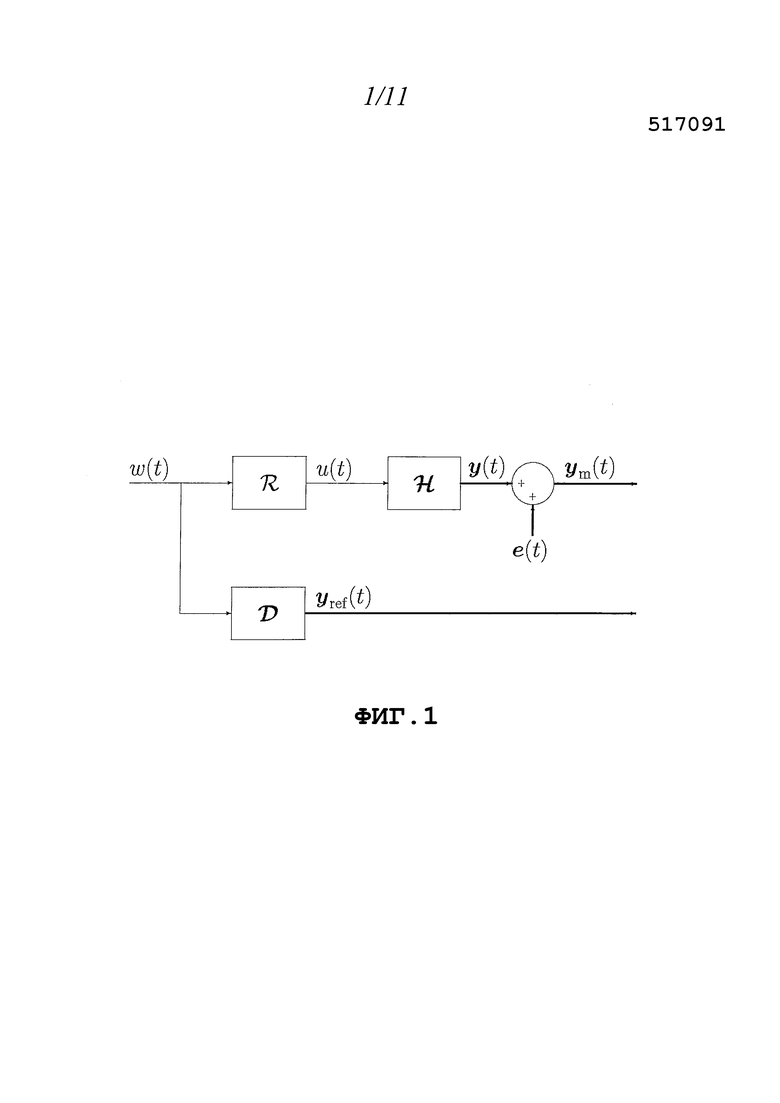
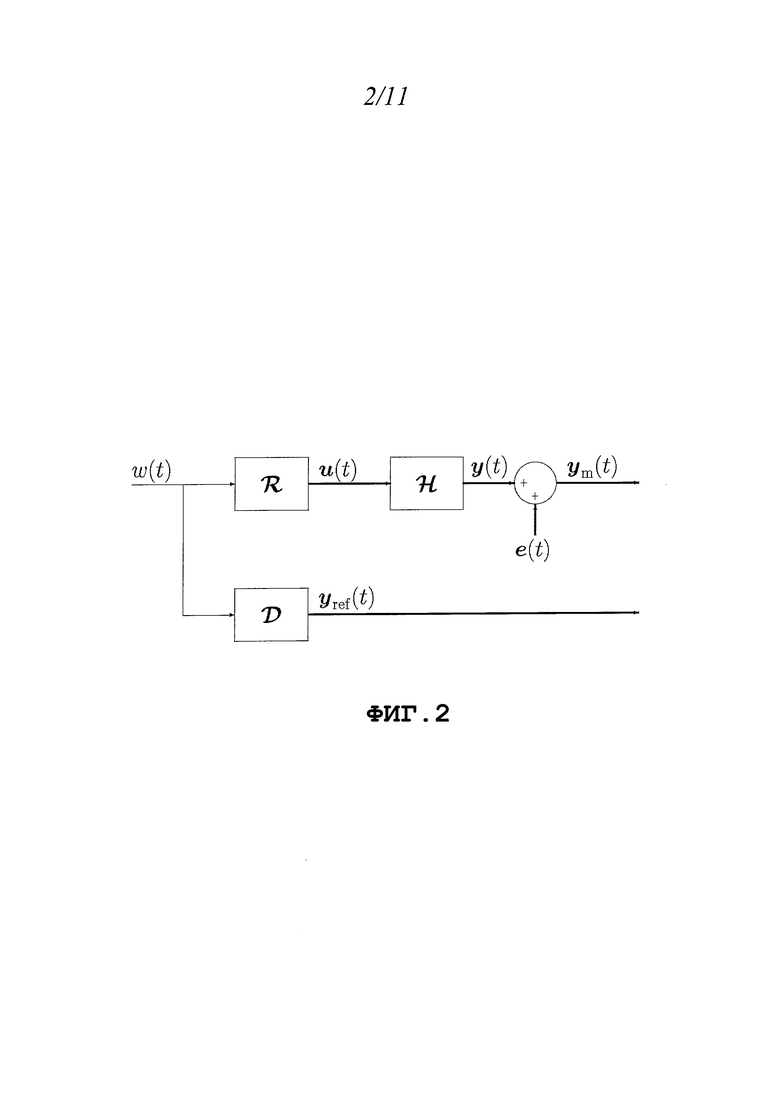
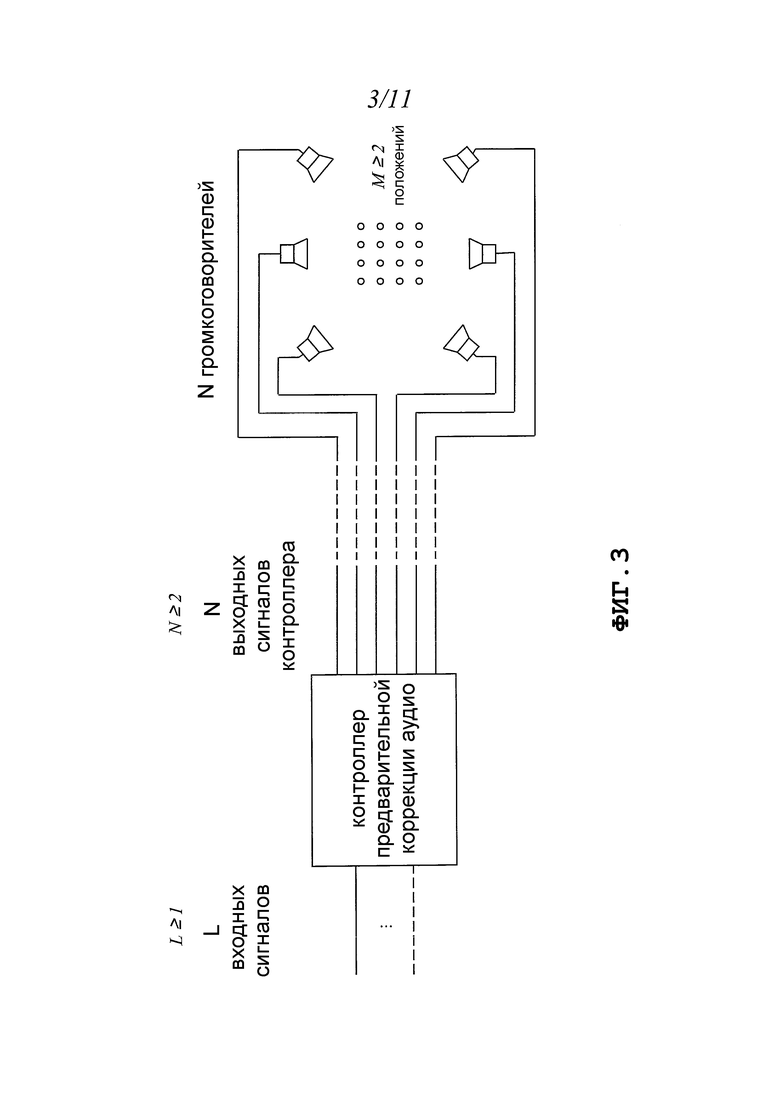
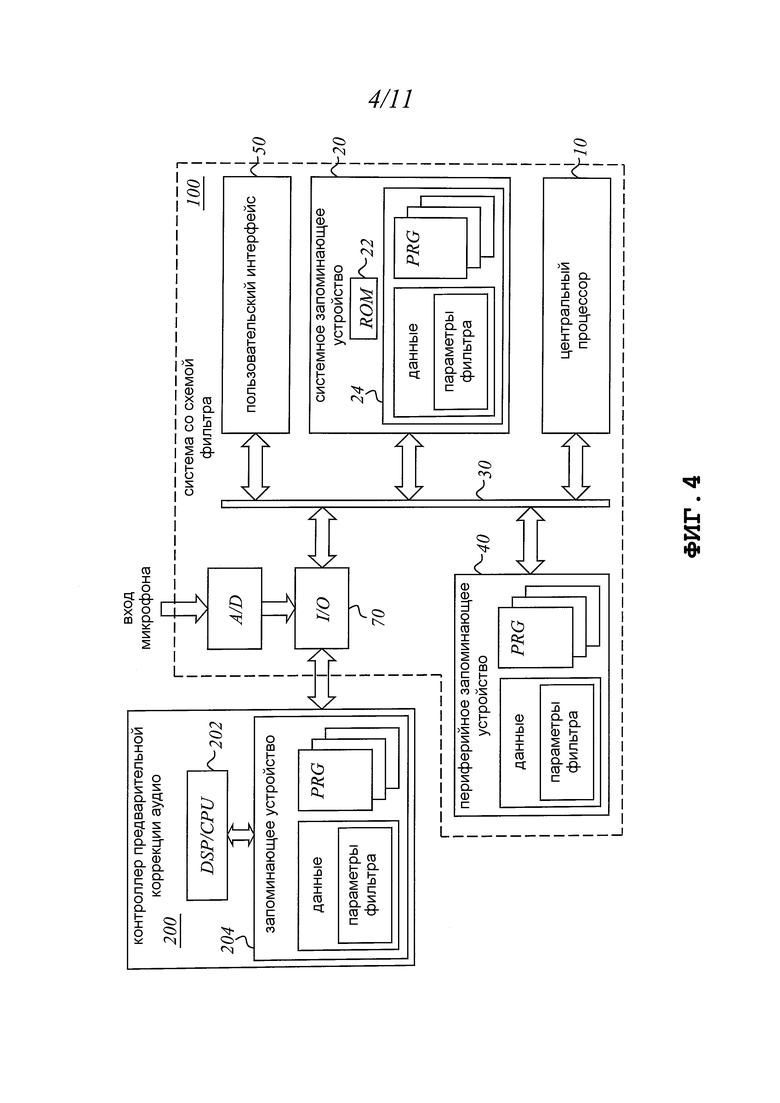
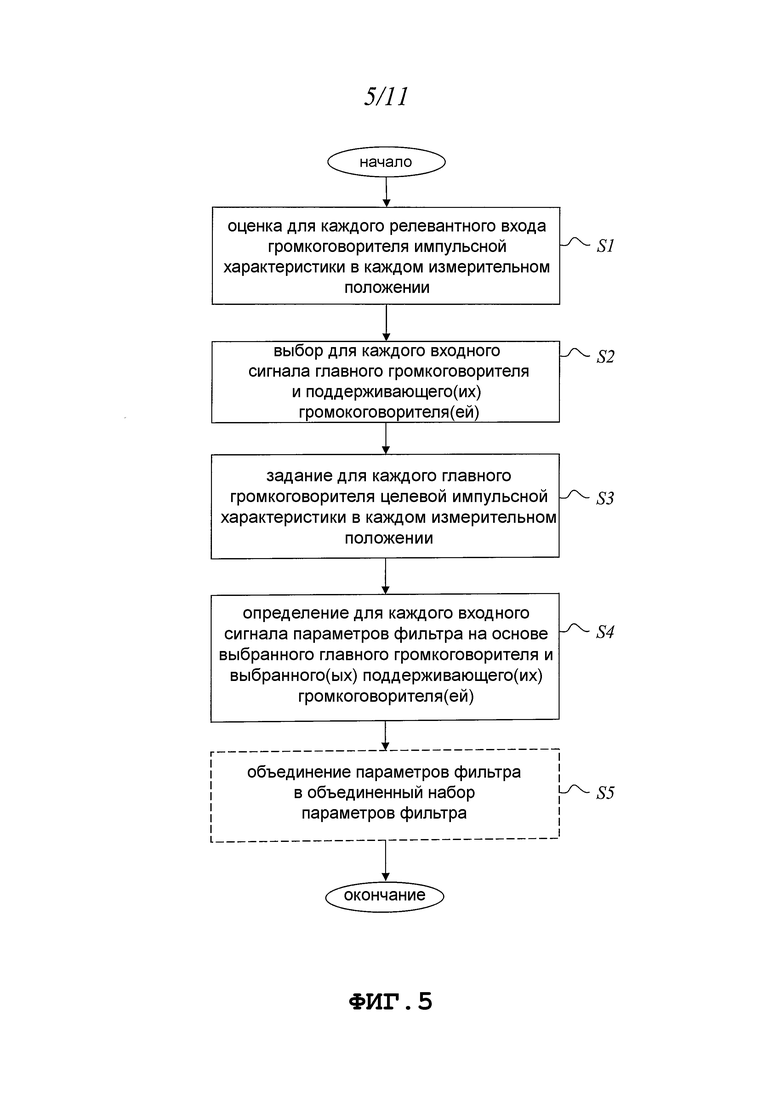
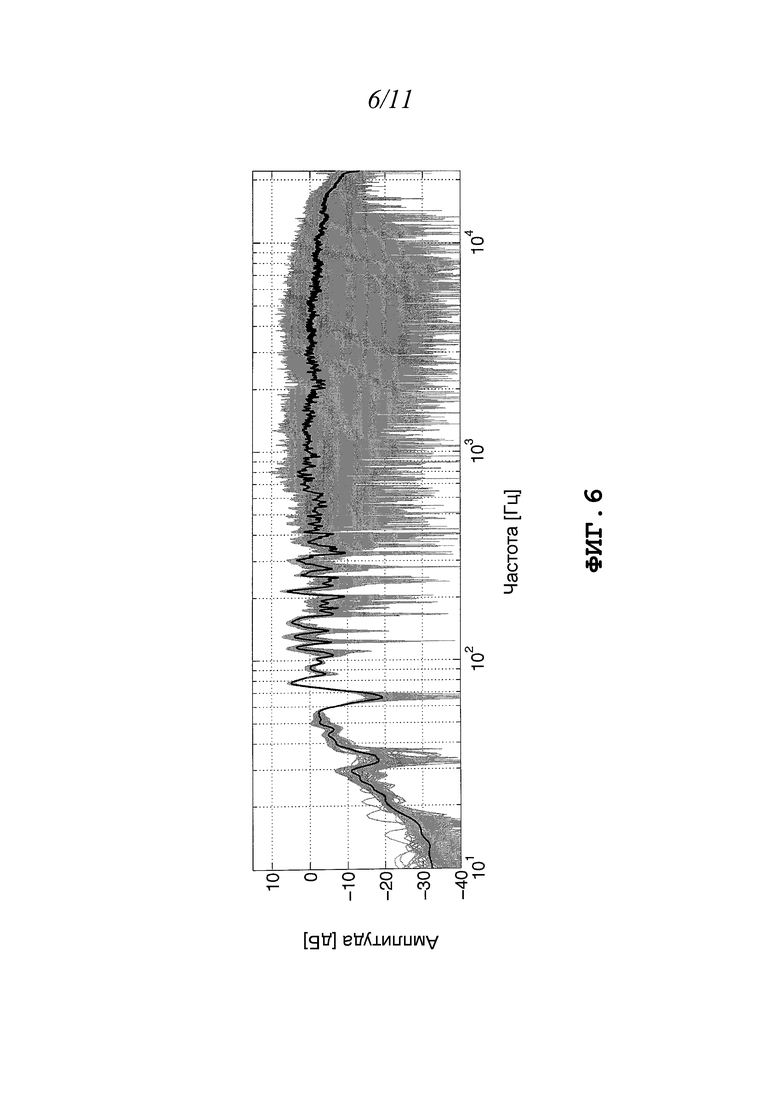
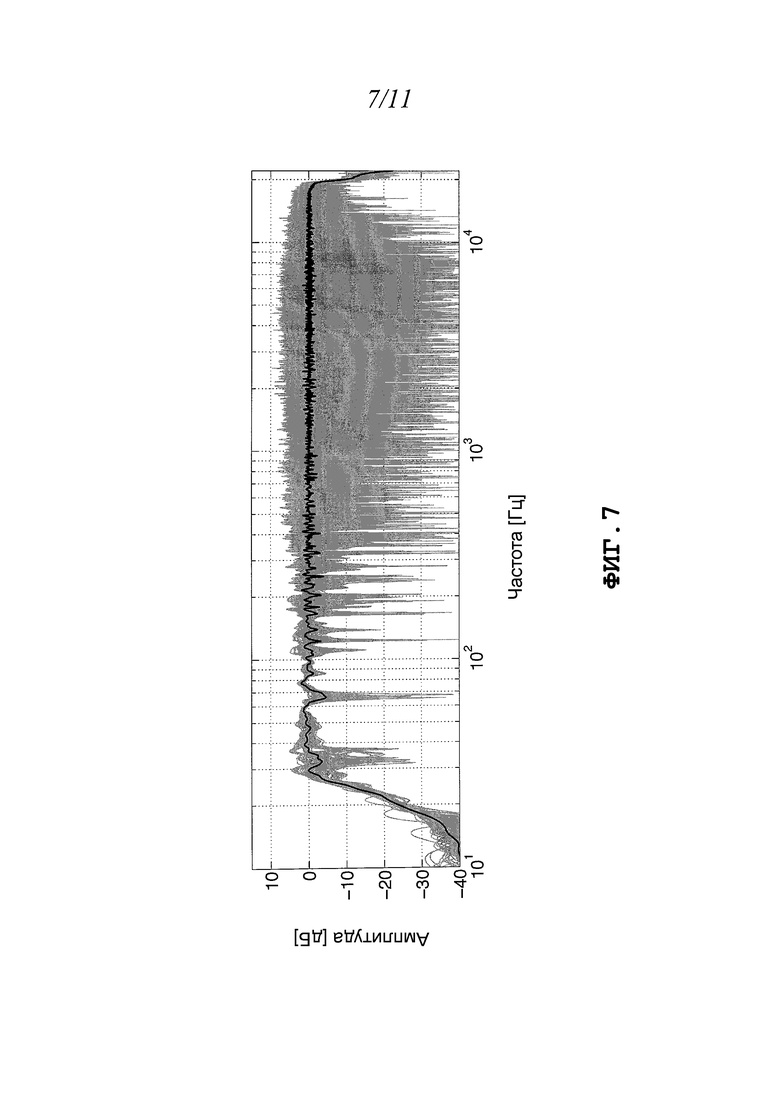
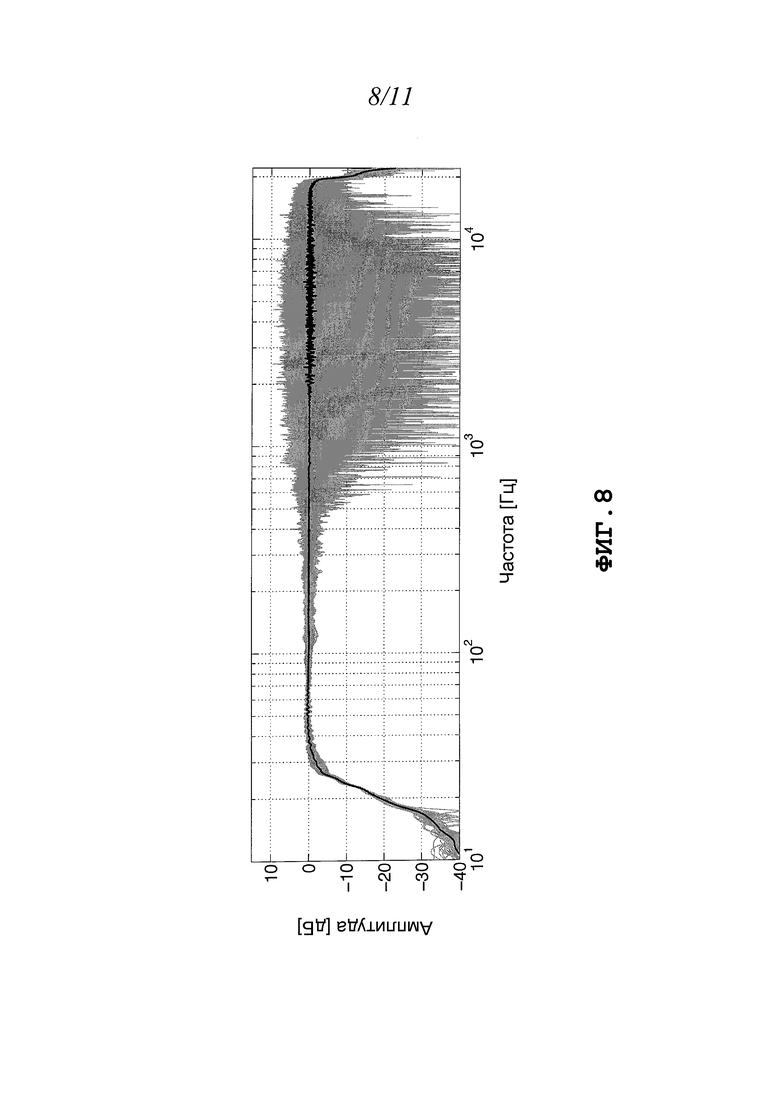
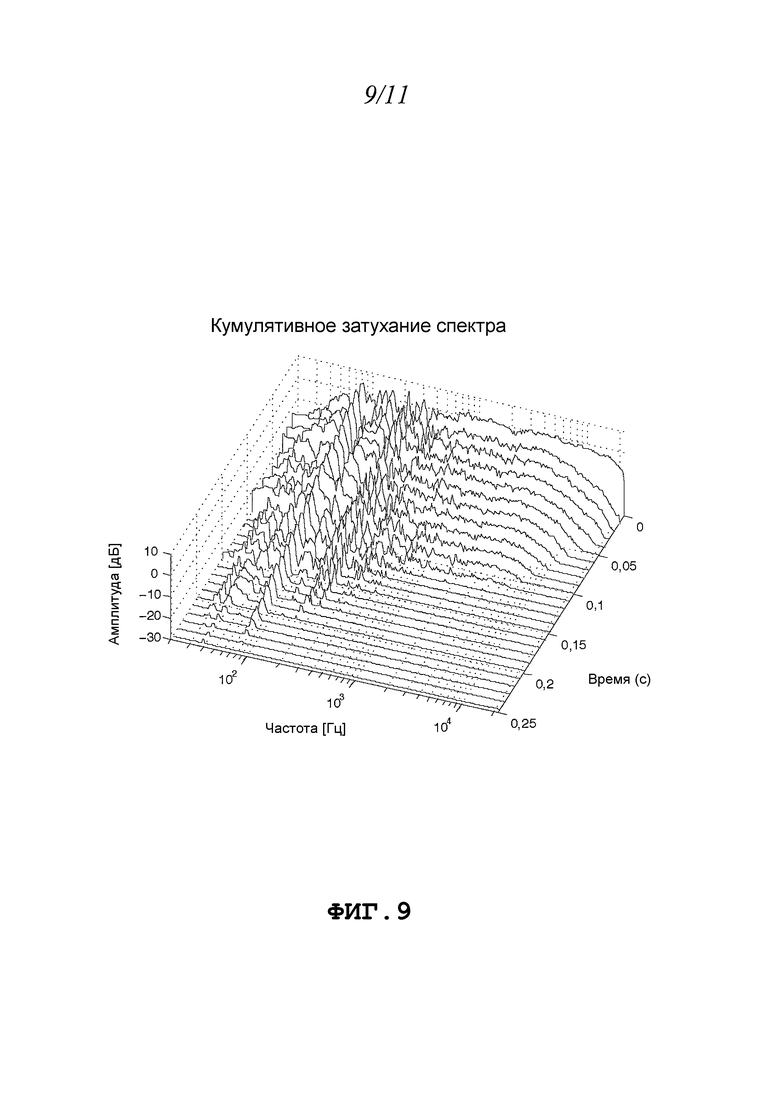
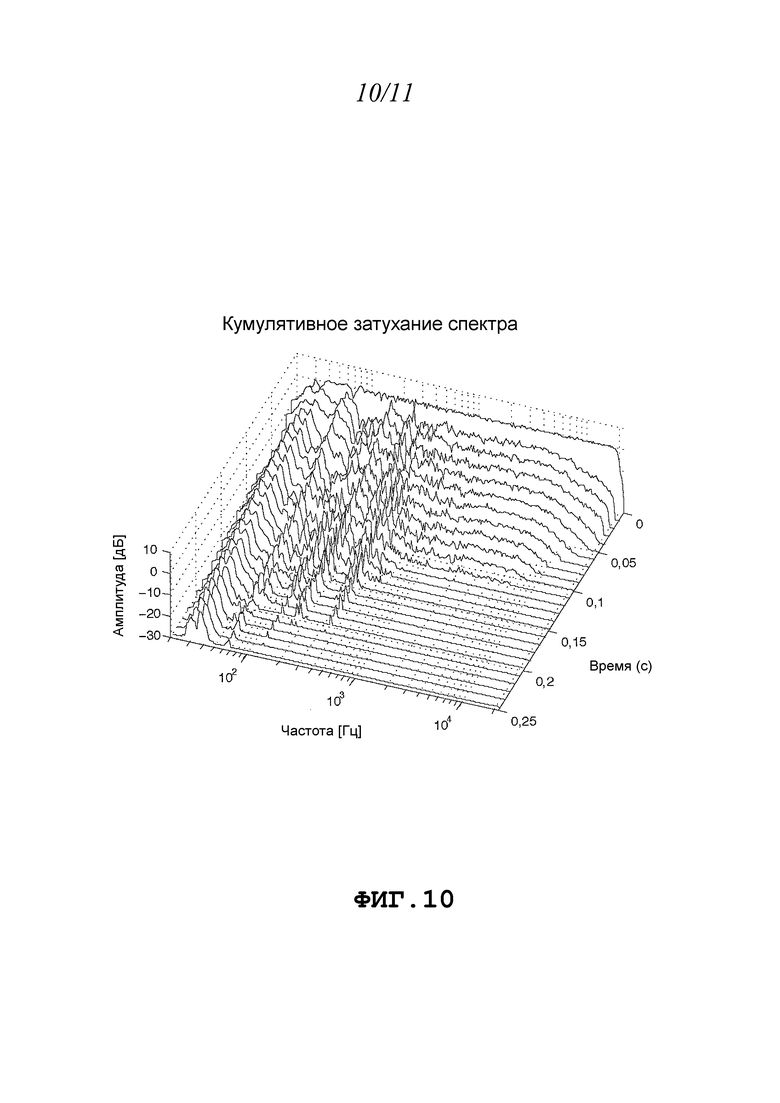
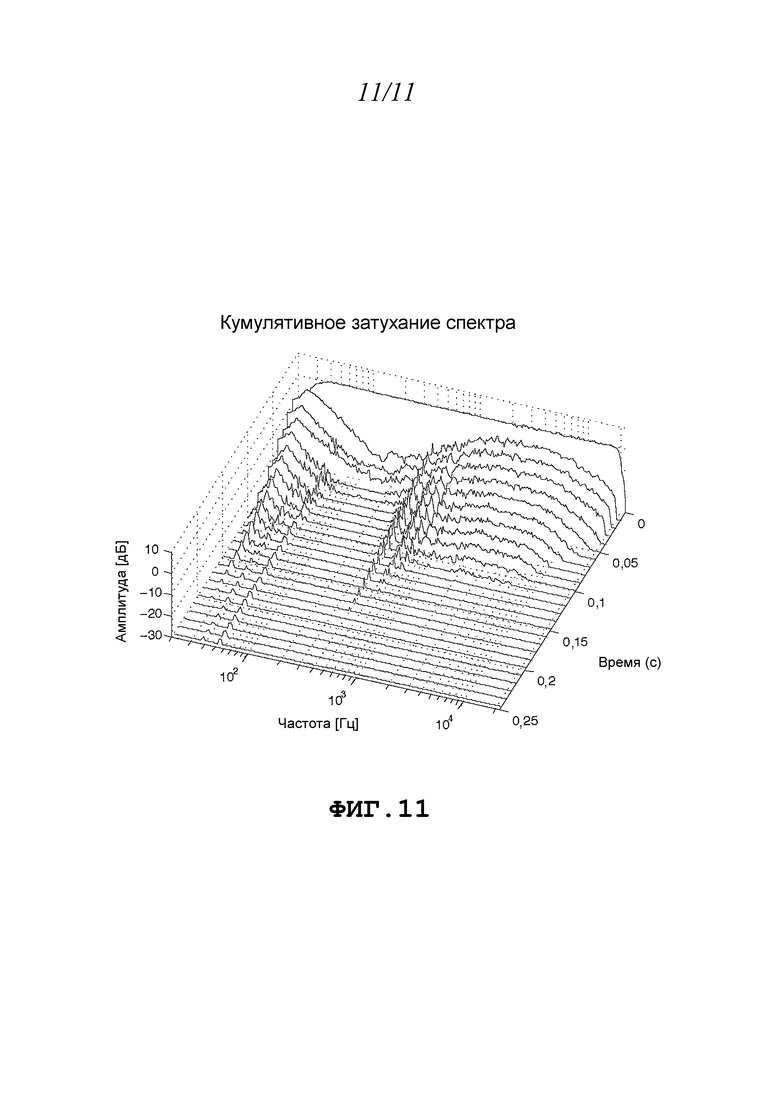
Изобретение относится к средствам предварительной коррекции аудио с использованием переменного набора поддерживающих громкоговорителей. Технический результат заключается в обеспечении возможности расширенной предварительной коррекции для повышения качества воспроизведения стерео или многоканального аудиоматериала в двух или более громкоговорителях. Определяют контроллер предварительной коррекции аудио для ассоциированной системы формирования звука, содержащей N громкоговорителей. Контроллер предварительной коррекции аудио имеет множество L входов для L входных сигналов и N выходов для N выходных сигналов контроллера, один на каждый громкоговоритель. Оценивают для каждого из подмножества N входов громкоговорителя импульсную характеристику в каждом измерительном положении. Задают для каждого из L входных сигналов один выбранный громкоговоритель из N громкоговорителей в качестве главного громкоговорителя и выбранное подмножество S, включающее в себя один из N громкоговорителей в качестве поддерживающего громкоговорителя. Задают для каждого главного громкоговорителя целевую импульсную характеристику в каждом измерительном положении с целевой импульсной характеристикой, обладающей задержкой в распространении звука. 4 н. и 20 з.п. ф-лы, 11 ил.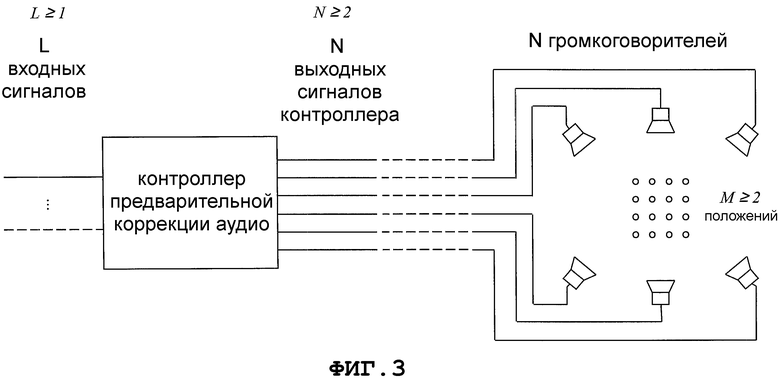
1. Способ определения контроллера предварительной коррекции аудио для ассоциированной системы формирования звука, содержащей общее число N≥2 громкоговорителей, каждый из которых имеет вход громкоговорителя, причем упомянутый контроллер предварительной коррекции аудио имеет множество из L≥1 входов для L входного(ых) сигнала(ов) и N выходов для N выходных сигналов контроллера, один для каждого громкоговорителя упомянутой системы формирования звука, причем упомянутый контроллер предварительной коррекции аудио имеет множество настраиваемых параметров фильтра, причем упомянутый способ содержит этапы, на которых:
- оценивают для каждого из, по меньшей мере, подмножества упомянутых N входов громкоговорителя импульсную характеристику в каждом из множества M≥2 измерительных положений, распределенных в интересующей области в среде прослушивания на основе измерений звука в упомянутых М измерительных положениях;
- задают для каждого из упомянутого(ых) L входного(ых) сигнала(ов) один выбранный громкоговоритель из упомянутых N громкоговорителей в качестве главного громкоговорителя и выбранное подмножество S, включающее в себя, по меньшей мере, один из упомянутых N громкоговорителей в качестве поддерживающего громкоговорителя(ей), где упомянутый главный громкоговоритель не является частью упомянутого подмножества;
- задают для каждого главного громкоговорителя целевую импульсную характеристику в каждом из упомянутых М измерительных положений с упомянутой целевой импульсной характеристикой, обладающей задержкой в распространении звука, где упомянутая задержка в распространении звука определяется на основе расстояния от главного громкоговорителя до соответствующего измерительного положения;
- определяют для каждого из упомянутого(ых) L входного(ых) сигнала(ов) на основе выбранного главного громкоговорителя и выбранного поддерживающего громкоговорителя(ей) параметры фильтра упомянутого контроллера предварительной коррекции аудио так, чтобы критериальная функция оптимизировалась при ограничении стабильности динамики упомянутого контроллера предварительной коррекции аудио с упомянутой критериальной функцией, включающей в себя взвешенное суммирование мощностей разниц между скорректированными оцененными импульсными характеристиками и целевыми импульсными характеристиками по упомянутым М измерительным положениям.
2. Способ по п. 1, в котором L≥2, и упомянутый способ содержит этап, на котором объединяют все упомянутые параметры фильтра, определенные для упомянутых L входных сигналов, в объединенный набор параметров фильтра для упомянутого контроллера предварительной коррекции аудио, причем упомянутый контроллер предварительной коррекции аудио с упомянутым объединенным набором параметров фильтра выполнен с возможностью работы по упомянутым L входным сигналам для формирования упомянутых N выходных сигналов контроллера в упомянутые громкоговорители для получения упомянутых целевых импульсных характеристик.
3. Способ по п. 1 или 2, в котором упомянутый контроллер предварительной коррекции аудио выполнен с возможностью управления акустической характеристикой Р главных громкоговорителей, где P≤L и Р≤N, с помощью комбинированного использования упомянутых Р главных громкоговорителей и для каждого главного громкоговорителя дополнительного числа поддерживающих громкоговорителей 1≤S≤N-1 из упомянутых N громкоговорителей.
4. Способ по п. 1 или 2, в котором упомянутый контроллер предварительной коррекции аудио имеет возможность создания нулевого выхода в некоторые из упомянутых N громкоговорителей для некоторого набора из его настраиваемых параметров фильтра.
5. Способ по п. 1 или 2, в котором упомянутый этап определения параметров фильтра упомянутого контроллера предварительной коррекции аудио основан на ЛКГ-оптимизации (линейно-квадратичная гауссовская, LQG) параметров устойчивого, линейного и каузального контроллера с прямой связью с множеством переменных на основе заданной целевой динамической системы и динамической модели системы формирования звука.
6. Способ по п. 1 или 2, при этом каждый из упомянутых N выходных сигналов контроллера упомянутого контроллера предварительной коррекции аудио подается в соответствующий громкоговоритель через всечастотный фильтр, включающий в себя компонент коррекции фазы и компонент задержки, что приводит к N отфильтрованным выходным сигналам контроллера.
7. Способ по п. 1 или 2, в котором упомянутая критериальная функция включает в себя элементы выбраковки, при этом упомянутые элементы выбраковки таковы, что упомянутый контроллер предварительной коррекции аудио, полученный оптимизацией упомянутой критериальной функции, вырабатывает уровни сигнала ограниченной амплитуды по выбранному подмножеству упомянутых выводов контроллера предварительной коррекции, получая ограниченные уровни сигнала по выбранным входам громкоговорителя для упомянутых N громкоговорителей для заданных частотных диапазонов.
8. Способ по п. 7, в котором упомянутые элементы выбраковки выбраны по-разному множество раз, и упомянутый этап определения параметров фильтра упомянутого контроллера предварительной коррекции аудио повторяется для каждого выбора упомянутых элементов выбраковки, что приводит ко множеству образцов упомянутого контроллера предварительной коррекции аудио, каждый из которых вырабатывает уровни сигнала с отдельными ограниченными амплитудами для упомянутых S поддерживающих громкоговорителей для заданных частотных диапазонов.
9. Способ по любому из пп. 1, 2, 8, в котором упомянутая критериальная функция включает в себя, во-первых, набор моделей, описывающих диапазон возможных ошибок в оцениваемых импульсных характеристиках и, во-вторых, операцию объединения, где упомянутая операция объединения является суммой, взвешенной суммой либо статистическим ожиданием по упомянутому набору моделей.
10. Способ по любому из пп. 1, 2, 8, в котором упомянутый этап, на котором определяют параметры фильтра упомянутого контроллера предварительной коррекции аудио, также основан на регулировании параметров фильтра упомянутого контроллера предварительной коррекции аудио для достижения целевой амплитудной частотной характеристики упомянутой системы формирования звука, включающей в себя упомянутый контроллер предварительной коррекции аудио в, по меньшей мере, подмножестве упомянутых М измерительных положений.
11. Способ по п. 10, в котором упомянутый этап настройки параметров фильтра упомянутого контроллера предварительной коррекции аудио основан на оценке частотных характеристик амплитуды в, по меньшей мере, подмножестве упомянутых М измерительных положений и, следовательно, на определении модели с минимальной фазой упомянутой системы формирования звука, включая упомянутый контроллер предварительной коррекции аудио.
12. Способ по любому из пп. 1, 2, 8, 11, где целевые импульсные характеристики являются ненулевыми и включают в себя настраиваемые параметры, которые могут быть модифицированы в заданных пределах.
13. Способ по п. 12, где настраиваемые параметры целевых импульсных характеристик, а также настраиваемые параметры контроллера предварительной коррекции аудио регулируются совместно с целью оптимизации упомянутой критериальной функции.
14. Способ по любому из пп. 1, 2, 8, 11, 13, в котором упомянутый этап оценки для каждого одного из, по меньшей мере, подмножества упомянутых N входов громкоговорителей, импульсной характеристики в каждом из множества М измерительных положений основан на модели, описывающей динамическую характеристику упомянутой системы формирования звука в упомянутых М измерительных положениях.
15. Способ по п. 1, в котором упомянутый контроллер предварительной коррекции создается с помощью реализации упомянутых параметров фильтра в структуре аудиофильтра.
16. Способ по п. 15, в котором упомянутая структура аудиофильтра реализована вместе с упомянутой системой формирования звука, чтобы позволить формирование упомянутой целевой импульсной характеристики в упомянутых М измерительных положениях в упомянутой среде прослушивания.
17. Способ по любому из пп. 1, 2, 8, 11, 13, 15, 16, в котором упомянутая система формирования звука является автомобильной аудиосистемой либо мобильной студийной аудиосистемой, и упомянутая среда прослушивания является частью автомобильной либо мобильной студийной системы.
18. Способ по любому из пп. 1, 2, 8, 11, 13, 15, 16, в котором упомянутая система формирования звука является аудиосистемой домашнего кинотеатра, аудиосистемой концертного зала, домашней аудиосистемой либо профессиональной аудиосистемой, и упомянутая среда прослушивания является частью домашнего кинотеатра, концертного зала, дома, студии, аудитории либо любых других помещений.
19. Система для определения контроллера предварительной коррекции аудио для ассоциированной системы формирования звука, содержащей общее число N≥2 громкоговорителей, каждый из которых имеет вход громкоговорителя, причем упомянутый контроллер предварительной коррекции аудио имеет множество из L≥1 входов для L входного(ых) сигнала(ов) и N выходов для N выходных сигналов контроллера, один для каждого громкоговорителя упомянутой системы формирования звука, причем упомянутый контроллер предварительной коррекции аудио имеет множество настраиваемых параметров фильтра, причем упомянутая система содержит:
- средство для оценки для каждого из, по меньшей мере, подмножества упомянутых N входов громкоговорителя, импульсной характеристики в каждом из множества М≥2 измерительных положений, распределенных в интересующей области в среде прослушивания на основе измерений звука в упомянутых М измерительных положениях;
- средство для задания для каждого из упомянутого(ых) L входного(ых) сигнала(ов) одного выбранного громкоговорителя из упомянутых N громкоговорителей в качестве главного громкоговорителя и выбранного подмножества S, включающего в себя, по меньшей мере, один из упомянутых N громкоговорителей в качестве поддерживающего громкоговорителя(ей), где упомянутый главный громкоговоритель не является частью упомянутого подмножества;
- средство для задания для каждого главного громкоговорителя целевой импульсной характеристики в каждом из упомянутых М измерительных положений с упомянутой целевой импульсной характеристикой, обладающей задержкой в распространении звука, где упомянутая задержка в распространении звука определяется на основе расстояния от главного громкоговорителя до соответствующего измерительного положения;
- средство для определения для каждого из упомянутого (ых) L входного(ых) сигнала(ов) на основе выбранного главного громкоговорителя и выбранного поддерживающего громкоговорителя(ей) параметров фильтра упомянутого контроллера предварительной коррекции аудио так, чтобы критериальная функция оптимизировалась при ограничении стабильности динамики упомянутого контроллера предварительной коррекции аудио, с упомянутой критериальной функцией, включающей в себя взвешенное суммирование мощностей разниц между скорректированными оцененными импульсными характеристиками и целевыми импульсными характеристиками по упомянутым М измерительным положениям.
20. Система по п. 19, причем L≥2, и упомянутая система содержит средство для объединения всех упомянутых параметров фильтра, определенных для упомянутых L входных сигналов контроллера, в объединенный набор параметров фильтра для упомянутого контроллера предварительной коррекции аудио, причем упомянутый контроллер предварительной коррекции аудио с упомянутым объединенным набором параметров фильтра конфигурируется для работы по упомянутым L входным сигналам для формирования упомянутых N выходных сигналов контроллера в упомянутые громкоговорители для получения упомянутых целевых импульсных характеристик.
21. Система по п. 19 или 20, причем упомянутое средство для определения параметров фильтра упомянутого контроллера предварительной коррекции аудио выполнено с возможностью работы на основе ЛКГ-оптимизации (линейно-квадратичная гауссовская, LQG) параметров устойчивого, линейного и каузального контроллера с прямой связью с множеством переменных на основе заданной целевой динамической системы и динамической модели системы формирования звука.
22. Контроллер предварительной коррекции аудио, определенный с использованием способа по любому из пп. 1-18.
23. Контроллер предварительной коррекции аудио по п. 22, причем упомянутый контроллер предварительной коррекции аудио является линейным устойчивым каузальным контроллером с прямой связью.
24. Аудиосистема, содержащая систему формирования звука и контроллер предварительной коррекции аудио на входном пути в упомянутую систему формирования звука, причем упомянутый контроллер предварительной коррекции аудио определен с использованием способа по любому из пп. 1-18.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ХЛЕБА "ПЕКЛЕВАННЫЙ" | 2002 |
|
RU2257083C2 |
| СТРОИТЕЛЬНЫЙ БЛОК | 1992 |
|
RU2104374C1 |
| Устройство контроля системы импульсного регулирования тяговых электродвигателей транспортного средства | 1985 |
|
SU1355509A1 |
| ПРОСТРАНСТВЕННАЯ ЗВУКОВОСПРОИЗВОДЯЩАЯ СИСТЕМА | 1996 |
|
RU2106074C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПЕРЕДАЧИ СООБЩЕНИЙ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ, НАПРИМЕР, СПОСОБ ОПТИМАЛЬНОГО ЗВУКОВОСПРОИЗВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПТИМАЛЬНОГО, ПРОСТРАНСТВЕННОГО, АКТИВНОГО ПОНИЖЕНИЯ УРОВНЯ СИГНАЛОВ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ | 1997 |
|
RU2145446C1 |
| СИСТЕМА И СПОСОБ ИСКУССТВЕННОЙ РЕВЕРБЕРАЦИИ (ВАРИАНТЫ) | 2005 |
|
RU2403674C2 |

