Изобретение относится к космической технике, в частности к конструкции космических аппаратов для калибровки РЛС.
Известны различные варианты космических аппаратов, предназначенных для калибровки радиолокационных станций, например КА сферической формы с эталонной отражающей поверхностью [1] стр. 47-49. В США, начиная с 1964 г., для калибровки РЛС запускаются эталонные сферические искусственные спутники Земли [2] стр. 37. В СССР в различные периоды времени были созданы и использовались космические аппараты «Тайфун-2». В состав КА входят по 24 устройства отстрела со сферическими эталонными отражателями [3] стр. 198-200.
Сферы являются удобными эталонными рассеивателями, ЭПР которых могут быть вычислены точно [4] стр. 204. Эталонная сфера обладает тем преимуществом для калибровки РЛС, что в силу симметрии величина ЭПР у нее постоянна [4] стр. 205.
Недостатком сферического КА с эталонной отражающей поверхностью является невозможность его использования для калибровки по величине ЭПР радиолокаторов, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, так как для таких радиолокаторов отражатель сферической формы невидим [5] стр. 103.
Известен космический аппарат с эталонными отражателями для юстировки и калибровки комплексов наземного и космического базирования - патент RU 2481248 «Космический аппарат с эталонными отражателями». Данный КА с эталонными отражателями взят за прототип.
В прототипе для калибровки РЛС также используются сферические эталонные отражатели.
Недостатком прототипа является невозможность применения предлагаемых сферических отражателей для калибровки по величине ЭПР радиолокаторов, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов. Другим недостатком прототипа для РЛС, работающих на волнах горизонтальной, вертикальной, а также круговой поляризации при ортогональном приеме отраженных сигналов, является малая ЭПР используемых сферических эталонных отражателей. Так, например, при диаметре сферы 25 см и длине волны РЛС 7 см ее ЭПР составит всего 0,04 м2, а при длине волны РЛС 1,9 м ЭПР такого сферического отражателя равна 0,013 м2 [1] стр. 49, таблица 2.1.3. Значительно увеличить ЭПР сферического отражателя, т.е. его радиус, невозможно из-за габаритных ограничений пусковой установки, размещаемой на борту космического аппарата.
Технический результат предполагаемого изобретения заключается в повышении эффективности калибровки РЛС, расширении функциональных возможностей КА при калибровке радиолокаторов наземного и морского базирования, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, а также возможностей проводить калибровку по величине ЭПР высокопотенциальных РЛС на малых углах места (3-5) градусов и в режиме функционирования с пониженной мощностью излучения.
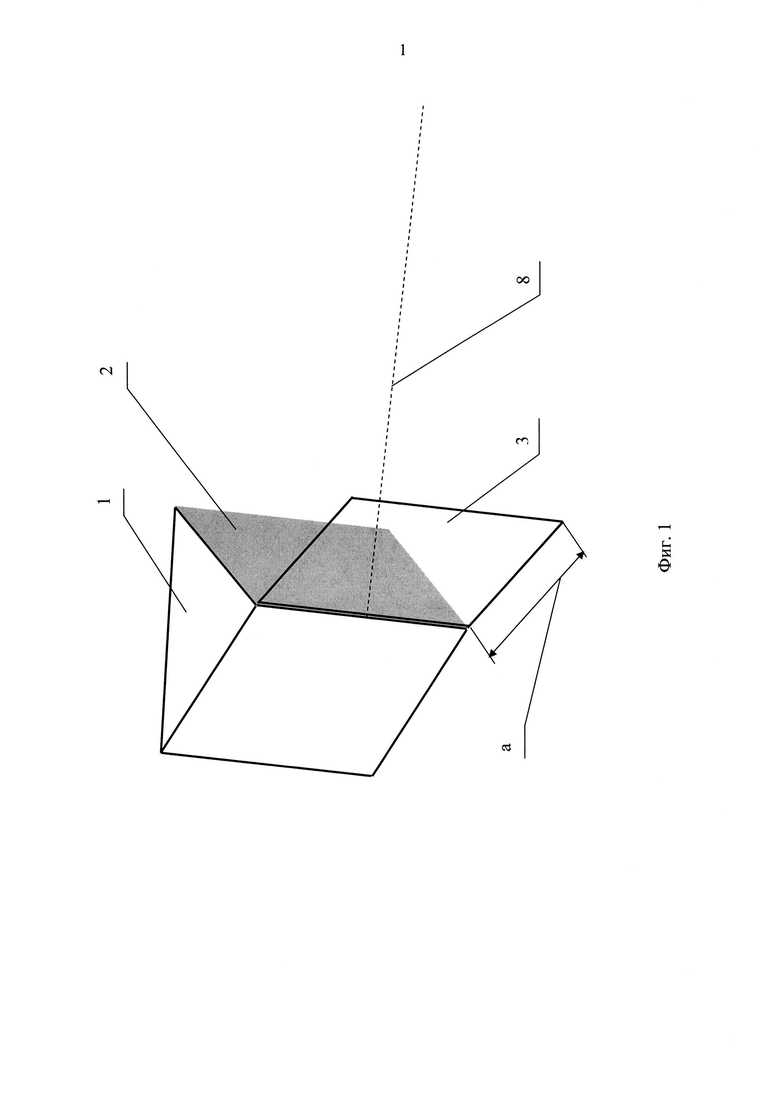
Указанный технический результат достигается тем, что корпус КА выполнен в виде прямой призмы 1, одна из граней 2 которой имеет радиоотражающую поверхность. Кроме того, корпус КА дополнен плоской прямоугольной пластиной 3 из радиоотражающего материала, шарнирно связанной с гранью прямой призмы, имеющей радиоотражающую поверхность (см. фиг. 1). Причем плоская прямоугольная пластина 3 из радиоотражающего материала развернута относительно грани 2 прямой призмы, имеющей радиоотражающую поверхность так, что образуется двугранный уголковый отражатель с гранями, развернутыми на угол α в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой РЛС;
a - размер грани уголкового отражателя (см. фиг. 1, фиг. 2).
При этом плоская прямоугольная пластина из радиоотражающего материала снабжена механизмом раскрытия 4 и узлом фиксации 5 (см. фиг. 2, фиг. 3). В КА дополнительно введены аппаратура командной радиолинии (АКРЛ), навигационная аппаратура потребителя (НАП) космических систем «ГЛОНАСС» и/или GPS, бортовая вычислительная система (БВС), микроконтроллер, блок сопряжения системы ориентации и стабилизации и узла фиксации с микроконтроллером.
Причем вход и выход АКРЛ информационно соединены с БВС, выход НАП подключен к первому входу бортовой вычислительной системы, первый выход бортовой вычислительной системы подключен к первому входу микроконтроллера, первый выход микроконтроллера подключен к первому входу блока сопряжения, первый выход блока сопряжения подключен к входу системы ориентации и стабилизации. Выход системы ориентации и стабилизации подключен ко второму входу блока сопряжения, второй выход блока сопряжения подключен ко второму входу микроконтроллера, второй выход микроконтроллера подключен ко второму входу бортовой вычислительной системы, которая управляет процессом ориентации КА относительно калибруемой РЛС. Кроме того, третий выход бортовой вычислительной системы подключен к третьему входу микроконтроллера, третий выход микроконтроллера подключен к третьему входу блока сопряжения, а третий выход блока сопряжения подключен к входу узла фиксации плоской прямоугольной пластины из радиоотражающего материала к прямой призме корпуса КА.
Кроме того, плоская прямоугольная пластина из радиоотражающего материала выполнена с возможностью ее раскладывания, при этом в транспортном положении она уложена и зафиксирована так, что прилегает к одной из граней прямой призмы, а в раскрытом положении развернута на угол α относительно грани прямой призмы, имеющей радиоотражающую поверхность (см. фиг. 2, фиг. 3).
Кроме того, узел фиксации плоской прямоугольной пластины из радиоотражающего материала к корпусу КА выполнен с электромеханической системой зачековки и расчековки.
Кроме того, механизм раскрытия плоской радиоотражающей пластины выполнен, например, в виде пружинного привода.
Кроме того, грань прямой призмы, имеющей радиоотражающую поверхность, и плоская прямоугольная пластина из радиоотражающего материала имеют одинаковые размеры.
Кроме того, плоская прямоугольная пластина имеет радиоотражающую поверхность с внутренней стороны образованного двугранного уголкового отражателя.
Кроме того, внешняя сторона плоской радиоотражающей пластины покрыта тонкопленочными фотоэлектрическими преобразователями.
Кроме того, плоская радиоотражающая пластина снабжена механическим устройством фиксации раскрытого положения.
Кроме того, грани прямой призмы корпуса КА, не имеющие радиоотражающей поверхности, покрыты фотоэлектрическими преобразователями.
Кроме того, в качестве навигационной аппаратуры потребителя для определения положения центра масс КА относительно калибруемой радиолокационной станции используют европейскую навигационную систему Galileo, либо систему Galileo совместно с навигационными системами «ГЛОНАСС» или GPS.
Кроме того, механизм раскрытия плоской радиоотражающей пластины выполнен из упругой ленты.
Предлагаемый космический аппарат для калибровки РЛС поясняется чертежами фиг. 1 - фиг. 6.
Фиг. 1 - общий вид КА с корпусом в виде прямой призмы, одна из граней которой имеет радиоотражающую поверхность, и плоской прямоугольной пластины из радиоотражающего материала в рабочем (орбитальном) положении.
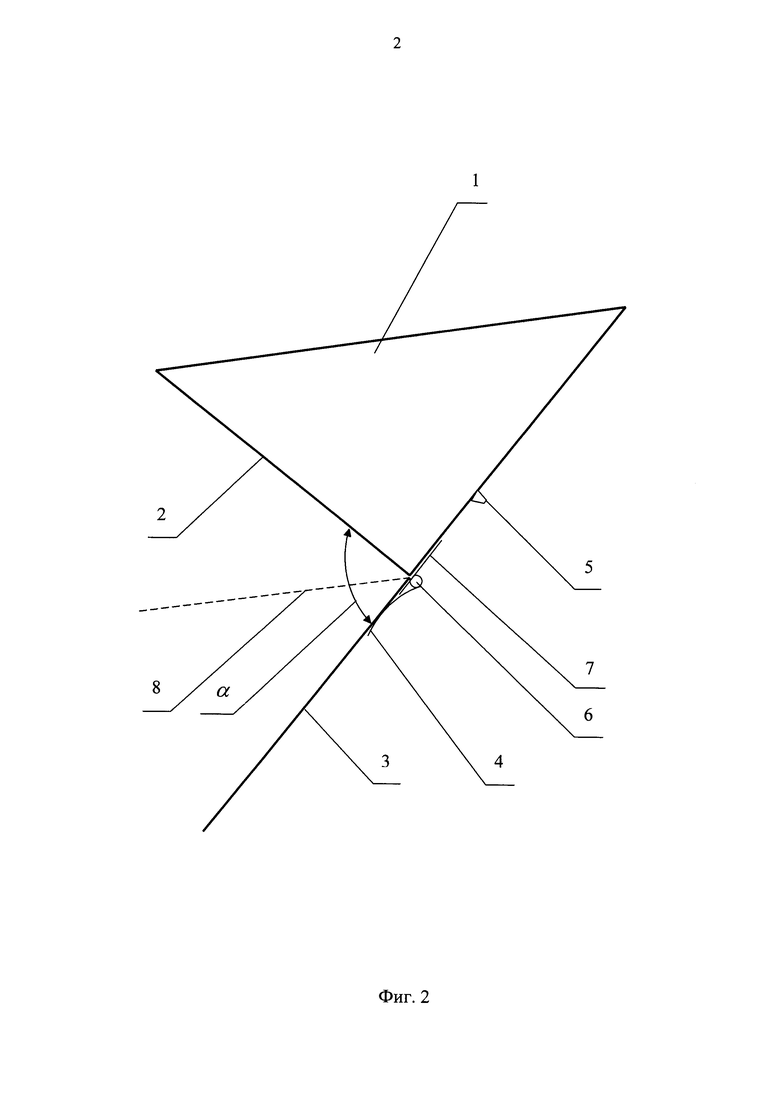
Фиг. 2 - вид сверху на КА с плоской радиоотражающей пластиной 3, где 4 - механизм раскрытия; 6 - шарнирное соединение; 7 - механическое устройство фиксации раскрытого положения плоской радиоотражающей пластины.
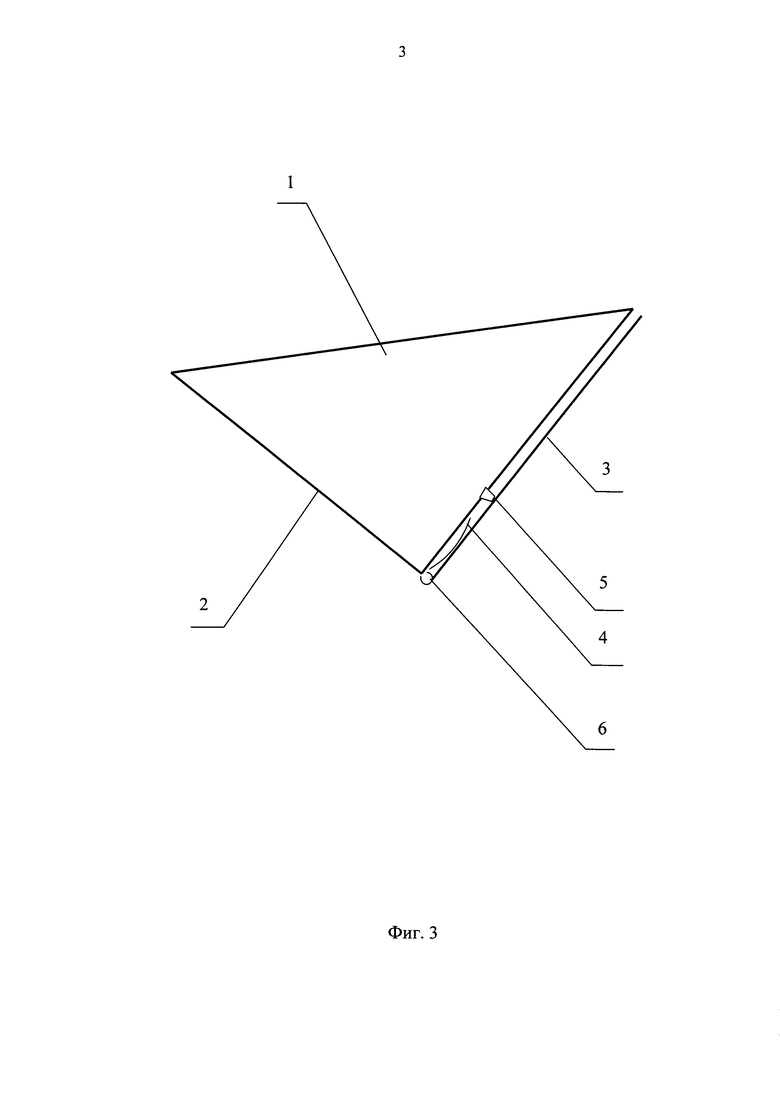
Фиг. 3 - вид сверху на КА в транспортном положении перед запуском на орбиту вокруг Земли, где 4 - механизм раскрытия; 5 - узел фиксации к грани прямой призмы корпуса КА; 6 - шарнирное соединение.
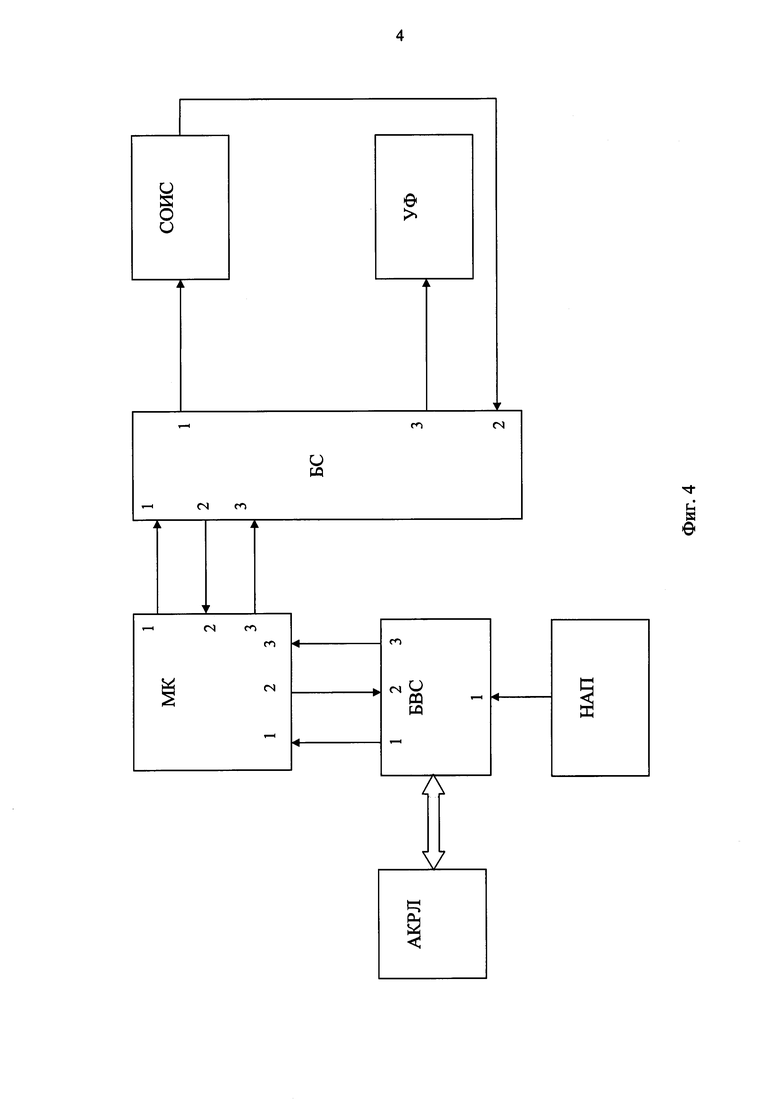
На фиг. 4 представлена блок-схема информационной взаимосвязи аппаратуры командной радиолинии, бортовой вычислительной системы, навигационной аппаратуры потребителя, микроконтроллера, блока сопряжения системы ориентации и стабилизации и узлом фиксации, содержащая:
- аппаратуру командной радиолинии (АКРЛ);
- микроконтроллер (МК);
- бортовую вычислительную систему (БВС);
- навигационную аппаратуру потребителя (НАП);
- блок сопряжения (БС);
- систему ориентации и стабилизации (СОИС);
- узел фиксации (УФ).
Информационная взаимосвязь между аппаратурой командной радиолинии, бортовой вычислительной системой, навигационной аппаратурой потребителя, микроконтроллером, блоком сопряжения системы ориентации и стабилизации и узлом фиксации осуществляется по линиям информационного обмена (на чертеже обозначены тонкой сплошной линией).
Вход и выход АКРЛ информационно подключены к БВС. Выход НАП подключен к первому входу бортовой вычислительной системы, первый выход бортовой вычислительной системы подключен к первому входу микроконтроллера, первый выход микроконтроллера подключен к первому входу БС, первый выход БС подключен к входу СОИС. Выход СОИС подключен ко второму входу БС, второй выход БС подключен ко второму входу микроконтроллера, второй выход микроконтроллера подключен ко второму входу бортовой вычислительной системы, которая управляет процессом ориентации КА относительно калибруемой РЛС. Третий выход бортовой вычислительной системы подключен к третьему входу микроконтроллера, третий выход микроконтроллера подключен к третьему входу БС, третий выход БС подключен к входу УФ.
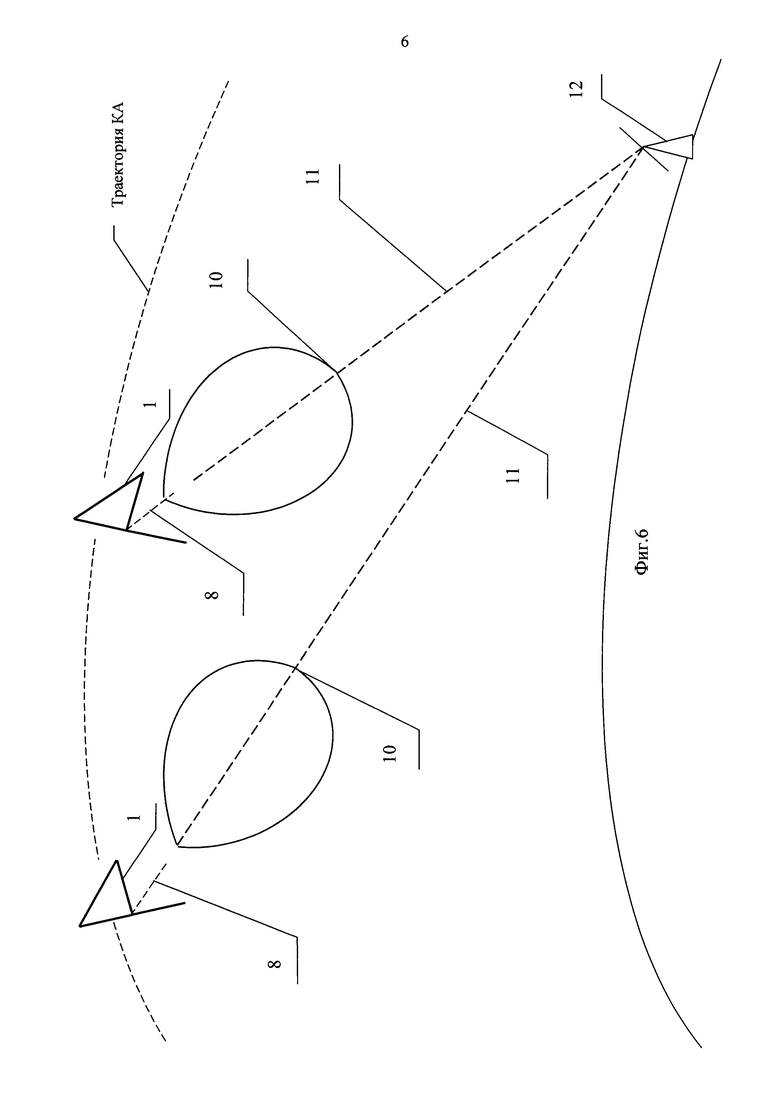
Фиг. 5 - относительное положение КА и калибруемой РЛС после раскрытия плоской радиоотражающей пластины, где 8 - биссектриса угла двугранного уголкового отражателя, образованного плоской радиоотражающей пластиной совместно с радиоотражающей поверхностью грани прямой призмы корпуса КА; 9 - основной лепесток индикатрисы рассеяния образованного уголкового отражателя; 10 - максимум основного лепестка индикатрисы рассеяния образованного УО; 11 - линия визирования калибруемой РЛС 12.
Фиг. 6 - схема проведения сеанса калибровки РЛС, где 8 - биссектриса угла двугранного уголкового отражателя, образованного плоской радиоотражающей пластиной совместно с радиоотражающей поверхностью грани прямой призмы корпуса КА; 11 - линия визирования калибруемой РЛС 12; 10 - максимум основного лепестка индикатрисы рассеяния УО, образованного плоской радиоотражающей пластиной совместно с радиоотражающей поверхностью грани прямой призмы корпуса КА.
Предлагаемый космический аппарат для калибровки радиолокационной станции содержит корпус, выполненный в виде прямой призмы 1, одна из граней которой имеет радиоотражающую поверхность 2 (см. фиг. 1). Внутри корпуса КА установлены приборный отсек, двигательная установка, системы ориентации и стабилизации, аппаратура командной радиолинии, бортовая вычислительная система, навигационная аппаратура потребителя космических систем «ГЛОНАСС» и/или GPS, микроконтроллер, блок сопряжения системы ориентации и стабилизации и узла фиксации с микроконтроллером (на чертеже не показаны).
На боковом ребре прямой призмы установлена плоская прямоугольная пластина, шарнирно соединенная с корпусом КА так, что ось поворота плоской прямоугольной пластины расположена параллельно боковому ребру прямой призмы. При этом плоская прямоугольная пластина из радиоотражающего материала развернута относительно грани прямой призмы, имеющей радиоотражающую поверхность, на угол α, образуя двугранный уголковый отражатель (см. фиг. 1, фиг. 2).
Величина угла α находится в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18 λ/а,
λ - длина волны калибруемой РЛС;
а - размер грани уголкового отражателя.
Плоская прямоугольная пластина из радиоотражающего материала снабжена механизмом раскрытия 4 и узлом фиксации 5 к корпусу КА (см. фиг. 2, фиг. 3).
Функционирование КА для калибровки РЛС по величине ЭПР происходит следующим образом: на время выведения КА на орбиту плоская прямоугольная пластина из радиоотражающего материала в транспортном положении уложена и зафиксирована так, что прилегает к одной из граней прямой призмы корпуса КА (фиг. 3). Таким образом, обеспечивается минимальный объем, занимаемый КА перед выводом на целевую орбиту.
После выведения КА на целевую орбиту для управления КА используют наземный комплекс управления с командной радиолинией и бортовую аппаратуру командной радиолинии КА. Причем с наземного комплекса управления по командной радиолинии передают на КА координаты радиолокационной станции, подлежащей калибровке по величине эффективной поверхности рассеяния. Затем с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и бортовой вычислительной системы определяют текущие координаты центра масс КА, углы текущей пространственной ориентации КА. С помощью бортовой вычислительной системы определяют положение центра масс КА относительно переданных с наземного комплекса управления координат калибруемой радиолокационной станции, а также ориентацию осей связанной системы координат КА относительно линии визирования калибруемой радиолокационной станции. Одновременно бортовая вычислительная система производит расчет и вычисляет пространственное положение биссектрисы угла 8 двугранного уголкового отражателя относительно линии визирования 11 калибруемой радиолокационной станции 12 на текущий момент времени. При расчете используются координаты (в связанной системе координат КА) середины ребра и положение биссектрисы угла двугранного уголкового отражателя, образованного плоской радиоотражающей пластиной совместно с радиоотражающей поверхностью грани прямой призмы корпуса КА, введенные в бортовую вычислительную систему до запуска КА на орбиту.
Полученные расчетные данные с первого выхода бортовой вычислительной системы поступают на первый вход микроконтроллера, формирующего команды управления, которые с первого выхода микроконтроллера поступают на первый вход БС, а затем с первого выхода БС поступают на вход СОИС. СОИС осуществляет разворот КА и совмещение положения биссектрисы угла двугранного уголкового отражателя с линией визирования калибруемой радиолокационной станции.
Выход СОИС подключен ко второму входу БС, второй выход БС подключен ко второму входу микроконтроллера, второй выход микроконтроллера подключен ко второму входу бортовой вычислительной системы, которая управляет процессом ориентации КА относительно калибруемой РЛС в режиме реального времени.
При совмещении положения биссектрисы угла двугранного уголкового отражателя с линией визирования калибруемой РЛС с третьего выхода бортовой вычислительной системы на третий вход микроконтроллера поступает сигнал, который преобразуется микроконтроллером и с третьего выхода микроконтроллера поступает на третий вход БС, а с третьего выхода БС сигнал поступает на вход УФ, в результате срабатывания УФ плоская радиоотражающая пластина освобождается от фиксации к корпусу КА и раскрывается при помощи механизмов раскрытия, образуя таким образом двугранный уголковый отражатель (фиг. 5). При этом угол α между гранями уголкового отражателя находится в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18 λ/а,
λ - длина волны калибруемой РЛС,
а - размер грани уголкового отражателя, образованного гранью прямой призмы, имеющей радиоотражающую поверхность, и плоской прямоугольной пластиной из радиоотражающего материала.
Затем при помощи механических устройств фиксации раскрытого положения плоские радиоотражающие пластины жестко фиксируются при заданном угле а. При этом наклеенные на оборотную сторону плоских радиоотражающих пластин тонкопленочные фотопреобразователи служат дополнительным источником электроэнергии для КА.
В дальнейшем информационное взаимодействие бортовой вычислительной системы, навигационной аппаратуры потребителя, микроконтроллера, блока сопряжения, системы ориентации и стабилизации КА обеспечивает удержание совмещения биссектрисы угла образованного двугранного уголкового отражателя с линией визирования калибруемой радиолокационной станции до момента окончания сеанса калибровки РЛС, координаты которой переданы с наземного комплекса управления КА.
Причем основной лепесток индикатрисы рассеяния двугранного уголкового отражателя, образованного гранью прямой призмы, имеющей радиоотражающую поверхность, и плоской прямоугольной пластиной из радиоотражающего материала, в течение сеанса калибровки направлен на калибруемую радиолокационную станцию, а максимум основного лепестка индикатрисы рассеяния двугранного уголкового отражателя совпадает с линией визирования калибруемой радиолокационной станции.
Использование КА, элементы конструкции которого образуют на целевой орбите двугранный уголковый отражатель с гранями, развернутыми на заданный угол α в диапазоне от (90-Δ) градусов до (90+Δ) градусов, позволяет достичь «уплощения» формы основного лепестка индикатрисы рассеяния уголкового отражателя в горизонтальной плоскости. Тем самым сектор углов индикатрисы рассеяния уголкового отражателя в горизонтальной плоскости, в котором его ЭПР является практически постоянной величиной, составляет 20°(±10°), [5] стр. 150, рис. 4.7, кривые 2, 3.
Следует отметить, что с увеличением ЭПР эталонного отражателя эффективность калибровки растет [9] стр. 65. Так, в качестве примера, значение ЭПР предлагаемого КА в направлении РЛС, работающей на длине волны 7 см, с учетом уменьшения ее значения на 3 дБ за счет отклонения угла между гранями УО от прямого для «уплощения» формы основного лепестка, при величине грани уголкового отражателя 100 см составит 2500 м2, что более чем в 800 раз больше ЭПР сферического отражателя диаметром 200 см [1] стр. 49, таблица 2.1.3. Такой размер имел калибровочный КА «Юг» в составе РКК «Тайфун» [1] стр. 49, [9] стр. 65.
Применение предлагаемого КА с УО, образованным гранью прямой призмы, имеющей радиоотражающую поверхность, и плоской прямоугольной пластиной из радиоотражающего материала и углом α между ними, заданным в определенном диапазоне градусов, значительно улучшает условия калибровки существующих и перспективных радиолокационных средств. Так, увеличение ЭПР предлагаемого КА с УО более чем в 800 раз позволяет увеличить дальность, на которой возможно калибровать РЛС по величине ЭПР, в 5,3 раза по сравнению со сферическим отражателем диаметром 200 см. Это в свою очередь приведет к тому, что КА с УО будет устойчиво наблюдаться на малых углах места (3-5) градусов, на которых необходимо калибровать высокопотенциальные РЛС дальнего обнаружения [1] стр. 48.
Кроме того, значительное увеличение ЭПР калибровочного КА позволит увеличить высоту орбиты запускаемого космического аппарата, что в свою очередь значительно увеличит время существования его на орбите [1] стр. 48.
Более того, применение предлагаемого КА с УО позволит проводить калибровку по величине ЭПР высокопотенциальных РЛС в режиме функционирования с пониженной мощностью излучения (так называемого «энергосберегающего режима»).
Таким образом, предлагаемая конструкция КА для калибровки РЛС и информационная взаимосвязь аппаратуры командной радиолинии, бортовой вычислительной системы, навигационной аппаратуры потребителя, микроконтроллера, блока сопряжения системы ориентации и стабилизации КА позволяет получить свойства, отличные от свойств известных решений, а именно:
- проведение сеансов калибровки РЛС наземного и морского базирования, координаты которых передают с наземного комплекса управления КА;
- высокоэффективную поверхность рассеяния (большую ЭПР) за счет использования уголкового отражателя;
- постоянное значение ЭПР в направлении калибруемой РЛС за счет ориентации основного лепестка индикатрисы рассеяния УО на РЛС и сохранения заданной ориентации в течение сеанса калибровки.
В том числе, введение информационных линий связи бортовой вычислительной системы, НАП космических систем «ГЛОНАСС» и/или GPS, микроконтроллера, блока сопряжения с системой ориентации и стабилизации обеспечивает:
- определение положения центра масс КА относительно местоположения заданной калибруемой радиолокационной станции;
- определение пространственного положения биссектрисы угла двугранного уголкового отражателя относительно линии визирования калибруемой радиолокационной станции на текущий момент времени;
- удержание с помощью системы ориентации и стабилизации КА совмещения биссектрисы угла уголкового отражателя с линией визирования калибруемой радиолокационной станции до момента окончания сеанса калибровки.
В результате сохраняется ориентация максимума основного лепестка индикатрисы рассеяния УО вдоль линии визирования калибруемой радиолокационной станции и, следовательно, постоянное значение ЭПР уголкового отражателя в направлении РЛС в течение сеанса калибровки РЛС по величине эффективной поверхности рассеяния.
При точности ориентации и стабилизации КА не более 0,5 градуса [1] стр. 259, [6] стр. 412, изменение ЭПР КА с УО в направлении максимума основного лепестка индикатрисы рассеяния УО не превышает 0,5 дБ, что обеспечит требуемую точность измерения ЭПР по отраженному сигналу не хуже 1 дБ [1] стр. 50.
Это позволяет сделать вывод о возможности использования предлагаемого КА для калибровки радиолокаторов наземного и морского базирования, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, а также проведения калибровки по величине ЭПР высокопотенциальных РЛС на малых углах места (3-5) градусов и в режиме функционирования с пониженной мощностью излучения (так называемого «энергосберегающего режима»).
Источники информации
1. Малые космические аппараты информационного обеспечения / под ред. Фатеева В.Ф. М.: Радиотехника. 2010. С. 47-50, с. 259.
2. Леонов А.И., Леонов С.А., Нагулинко Ф.В. и др. Испытания РЛС / под ред. Леонова А.И. М.: Радио и связь. 1990. С. 37.
3. Ракеты и космические аппараты КБ «Южное» / под ред. Конюхова С.Н. Днепропетровск. ГКБ «Южное» им. М.К. Янгеля. 2000. С. 198-200.
4. Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей / под ред. Колосова М.А. М.: Советское радио. 1972. С. 144-145, с. 193-194, с. 204-213.
5. Кобак В.О. Радиолокационные отражатели / под ред. Леонтьевского О.Н. М.: Советское радио. 1975. С. 103, с. 139, с. 144, с. 146, с. 150, с. 152, с. 235.
6. Бакитько Р.В., Болденков Е.Н., Булавский Н.Т. и др. ГЛОНАСС. Принципы построения и функционирования / под ред. Перова А.И., Харисова В.Н. М.: Радиотехника. 2010. С. 412.
7. Майсеня Л.И. Справочник по математике: основные понятия и формулы. Минск: Выш. шк. 2011. С. 201-203.
8. Патент RU №2481248, 27.12.2011. Космический аппарат с эталонными отражателями / Савельев Б.И. Открытое акционерное общество "Военно-промышленная корпорация "Научно-производственное объединение машиностроения".
9. Фатеев В.Ф. Современный взгляд на развитие космического эшелона информационных средств ВКО. Воздушно-космическая оборона. 2014. №1. С. 65.

Изобретение относится к космической технике, в частности к конструкции космических аппаратов (КА) для калибровки РЛС. КА содержит корпус с приборным отсеком, двигательную установку, системы ориентации и стабилизации, солнечные батареи. Корпус КА выполнен в виде прямой призмы, одна из граней которой имеет радиоотражающую поверхность, и дополнен плоской прямоугольной пластиной из радиоотражающего материала, шарнирно связанной с гранью прямой призмы, имеющей радиоотражающую поверхность. Плоская прямоугольная пластина снабжена механизмом раскрытия и узлом фиксации к одной из граней прямой призмы корпуса КА. В КА дополнительно введена аппаратура командной радиолинии (АКРЛ), навигационная аппаратура потребителя (НАП) космических систем «ГЛОНАСС» и/или GPS, бортовая вычислительная система (БВС), микроконтроллер (МК), блок сопряжения системы ориентации и стабилизации и узла фиксации с микроконтроллером. При этом АКРЛ, НАП, БВС, МК, блок сопряжения системы ориентации и стабилизации и узла фиксации с микроконтроллером взаимосвязаны. Технический результат изобретения заключается в повышении эффективности калибровки РЛС, расширении функциональных возможностей КА при калибровке радиолокаторов наземного и морского базирования, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, а также в возможности проводить калибровку по величине ЭПР высокопотенциальных РЛС на малых углах места (3-5) градусов и в режиме функционирования с пониженной мощностью излучения. 10 з.п. ф-лы, 6 ил.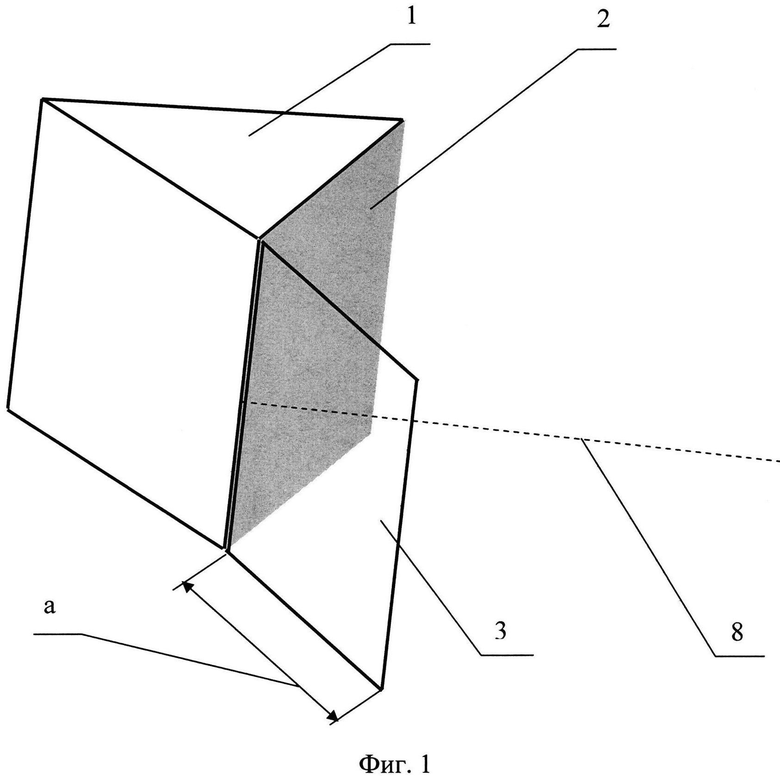
1. Космический аппарат (КА) для калибровки радиолокационных станций (РЛС), содержащий корпус с приборным отсеком, двигательную установку, системы ориентации и стабилизации, солнечные батареи, отличающийся тем, что корпус КА выполнен в виде прямой призмы, одна из граней которой имеет радиоотражающую поверхность, а на боковом ребре прямой призмы установлена плоская прямоугольная пластина из радиоотражающего материала, шарнирно соединенная с корпусом КА так, что ось поворота плоской прямоугольной пластины из радиоотражающего материала расположена параллельно боковому ребру прямой призмы, при этом плоская прямоугольная пластина из радиоотражающего материала развернута относительно грани прямой призмы, имеющей радиоотражающую поверхность, на угол α, образуя двугранный уголковый отражатель, причем величина угла α находится в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/a,
λ - длина волны калибруемой РЛС;
a - размер грани уголкового отражателя,
кроме того, плоская прямоугольная пластина из радиоотражающего материала снабжена механизмом раскрытия и узлом фиксации к прямой призме корпуса КА, дополнительно в КА введены аппаратура командной радиолинии (АКРЛ), навигационная аппаратура потребителя (НАП) космических систем "ГЛОНАСС" и/или GPS, бортовая вычислительная система (БВС), микроконтроллер, блок сопряжения системы ориентации и стабилизации и узла фиксации с микроконтроллером, причем вход и выход АКРЛ информационно подключены к БВС, выход НАП подключен к первому входу БВС, первый выход БВС подключен к первому входу микроконтроллера, первый выход микроконтроллера подключен к первому входу блока сопряжения, первый выход блока сопряжения подключен к входу системы ориентации и стабилизации, выход системы ориентации и стабилизации подключен ко второму входу блока сопряжения, второй выход блока сопряжения подключен ко второму входу микроконтроллера, второй выход микроконтроллера подключен ко второму входу БВС, которая управляет процессом ориентации КА относительно калибруемой РЛС, кроме того, третий выход БВС подключен к третьему входу микроконтроллера, третий выход микроконтроллера подключен к третьему входу блока сопряжения, а третий выход блока сопряжения подключен к входу узла фиксации плоской прямоугольной пластины из радиоотражающего материала к прямой призме корпуса КА.
2. Космический аппарат по п. 1, отличающийся тем, что плоская прямоугольная пластина из радиоотражающего материала выполнена с возможностью ее раскладывания, при этом в транспортном положении она уложена и зафиксирована так, что прилегает к одной из граней прямой призмы, а в раскрытом положении развернута на угол α относительно грани прямой призмы, имеющей радиоотражающую поверхность.
3. Космический аппарат по п. 1, отличающийся тем, что узел фиксации плоской прямоугольной пластины из радиоотражающего материала к корпусу КА выполнен с электромеханической системой зачековки и расчековки.
4. Космический аппарат по п. 1, отличающийся тем, что механизм раскрытия плоской радиоотражающей пластины выполнен, например, в виде пружинного привода.
5. Космический аппарат по п. 1, отличающийся тем, что грань прямой призмы, имеющей радиоотражающую поверхность, и плоская прямоугольная пластина из радиоотражающего материала имеют одинаковые размеры.
6. Космический аппарат по п. 1, отличающийся тем, что плоская прямоугольная пластина имеет радиоотражающую поверхность с внутренней стороны образованного двугранного уголкового отражателя.
7. Космический аппарат по п. 6, отличающийся тем, что внешняя сторона плоской радиоотражающей пластины покрыта тонкопленочными фотоэлектрическими преобразователями.
8. Космический аппарат по п. 1, отличающийся тем, что плоская радиоотражающая пластина снабжена механическим устройством фиксации раскрытого положения.
9. Космический аппарат по п. 1, отличающийся тем, что грани прямой призмы корпуса КА, не имеющие радиоотражающей поверхности, покрыты фотоэлектрическими преобразователями.
10. Космический аппарат по п. 1, отличающийся тем, что в качестве навигационной аппаратуры потребителя для определения положения центра масс КА относительно калибруемой радиолокационной станции используют европейскую навигационную систему Galileo, либо систему Galileo совместно с навигационными системами "ГЛОНАСС" или GPS.
11. Космический аппарат по п. 4, отличающийся тем, что механизм раскрытия плоской радиоотражающей пластины выполнен из упругой ленты.
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ КАЛИБРОВКИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ВЕЛИЧИНЕ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ | 2013 |
|
RU2544908C1 |
| КОСМИЧЕСКИЙ АППАРАТ С ЭТАЛОННЫМИ ОТРАЖАТЕЛЯМИ | 2011 |
|
RU2481248C1 |
| СПОСОБ КАЛИБРОВКИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО МИНИСПУТНИКУ С ЭТАЛОННЫМ ЗНАЧЕНИЕМ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ | 2013 |
|
RU2535661C1 |

