Изобретение относится к области антенной техники, в частности, к способам измерения диаграммы направленности (ДН) фазированной антенной решетки (ФАР) радиолокационной станции (РЛС) в процессе ее настройки и исследования.
Известен способ измерения диаграммы направленности фазированной антенной решетки - патент RU №2343495 [1]. Он основан на излучении и приеме сигналов фазированной антенной решеткой. Измерение амплитуды и фазы сигнала, переданного или принятого вспомогательной антенной, определение из измеренных данных амплитуды и фазы возбуждения элементов и вычисление диаграммы направленности фазированной антенной решетки в соответствии с математической моделью. При этом испытуемая фазированная антенная решетка располагается перед коллиматором в такой области, где излучаемое или принимаемое электромагнитное поле представляет собой плоскую волну параллельно фронту плоской волны таким образом, чтобы электрические длины путей от элементов фазированной антенной решетки до входа измерительной аппаратуры были одинаковы. А измеренные значения амплитуды фазы сигнала, переданного или принятого вспомогательной антенной, непосредственно используются для восстановления диаграммы направленности в соответствии с вышеупомянутой математической моделью.
Недостатком способа является:
- наличие вспомогательной антенны;
- сложность технической реализации при измерении активной фазированной антенной решетки в режиме передачи;
- наличие множества неконтролируемых факторов, влияющих на точность измерений;
- низкая точность ввиду отсутствия учета погрешности измерений.
Известен способ определения диаграммы направленности фазированной антенной решетки - патент RU №2709417 [2].
Способ заключается в приеме сигналов, переносимых электромагнитным полем, изменении сдвигов фаз сигналов, проходящих через один или несколько элементов фазированной антенной решетки, измерении амплитуды сигнала, формируемого вспомогательной антенной, при котором фазированная антенная решетка располагается в области, где принимаемое ею электромагнитное поле представляет собой плоскую электромагнитную волну, при этом задают набор направлений луча, охватывающий область видимости фазированной антенной решетки, а плоскость раскрыва, электрические длины от элементов которой до входа измерительной аппаратуры произвольны, располагают под углом относительно фронта плоской электромагнитной волны, изменяя с помощью фазовращателей сдвиги фаз сигналов, проходящих через элементы фазированной антенной решетки, устанавливают луч фазированной антенной решетки в одно из направлений набора, измеряют амплитуду сигнала, затем операции повторяют, каждый раз устанавливая луч фазированной антенной решетки последовательно в остальные направления, амплитуды сигнала, измеренные при каждом направлении луча, умножают на заранее определенные для этих направлений амплитуды сигнала от одного элемента в составе фазированной антенной решетки. Для достижения возможности определения диаграммы направленности фазированной антенной решетки при неподвижной установке испытуемой фазированной антенной решетки в горизонтальной или наклонных плоскостях, формирование плоской электромагнитной волны осуществляется вспомогательной антенной, располагаемой на борту дистанционно пилотируемого летательного аппарата квадрокоптерного типа, который в режиме зависания вместе со вспомогательной антенной и маломощным передатчиком на борту устанавливается на расстояние R≥2D2/λ, где R - удаление вспомогательной антенны на борту от плоскости раскрыва фазированной антенной решетки; D - наибольший размер раскрыва фазированной антенной решетки; λ - рабочая длина волны. Недостатком способа является наличие вспомогательной антенны.
Наиболее близким к заявленному способу является способ измерения динамических диаграмм направленности фазированных антенных решеток, заключающийся в измерении сигнала при электронном сканировании луча неподвижной антенны, принятый за прототип (Вестник Концерна ВКО «Алмаз - Антей», №4, 2016, с. 32-34) [3]. В процессе измерений (см. рис. 1, б) [3] антенна остается неподвижной, а уровни ДН в заданном направлении θk измеряются при отклонении луча на угол θk путем формирования в раскрыве линейного наклонного фазового распределения. При этом значение ДН сканирования в направлении приема сигнала от вспомогательной антенны остается неизменным, в процессе измерений в этом направлении фиксируется уровень ДН ФАР.
Недостатком этого способа является применение вспомогательной антенны и дополнительного источника сигнала, а также невозможность использования данного способа для измерения ДН ФАР в процессе функционирования РЛС.
Технический результат предлагаемого изобретения заключается в обеспечении измерения диаграммы направленности ФАР в процессе функционирования РЛС без использования дополнительного источника сигнала и вспомогательной антенны. Кроме того, технический результат заключается в повышении точности измерений диаграммы направленности приемо-передающей фазированной антенной решетки РЛС.
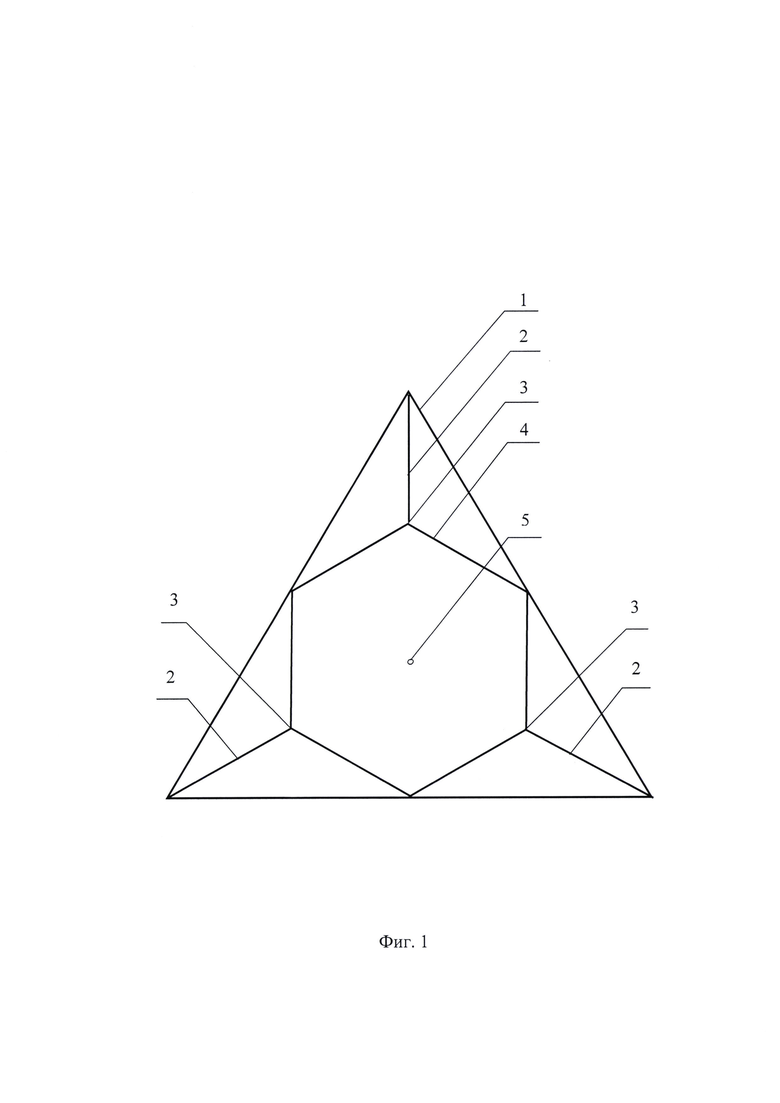
Указанный технический результат достигается тем, что передающим выходом приемо-передающей фазированной антенной решетки радиолокационной станции излучают сигнал в направлении отражателя, расположенного в дальней зоне ФАР, приемным входом ФАР принимают отраженный сигнал, измеряют амплитуду отраженного сигнала. Причем предварительно на орбиту вокруг Земли транспортируют космический аппарат (КА), корпус которого изготавливают в виде правильной шестигранной прямой призмы. При этом на одном из оснований призмы выполняют паз или углубление в форме правильной треугольной пирамиды. В паз или углубление в форме правильной треугольной пирамиды жестко закрепляют трехгранный уголковый отражатель (УО) с треугольными или секторными гранями из плоских взаимоперпендикулярных радиоотражающих пластин [4]. Причем ось трехгранного уголкового отражателя [5] совмещают с высотой правильной треугольной пирамиды и с продольной осью корпуса КА, а ребра трехгранного уголкового отражателя размещают в одной плоскости с тремя несмежными ребрами правильной шестигранной прямой призмы корпуса КА (фиг. 1).
Кроме того, в КА включают аппаратуру командной радиолинии, аппаратуру спутниковой навигации (АСН), бортовую вычислительную систему (БВС). Вместе с тем для управления КА используют наземный автоматизированный комплекс управления (НАКУ) с цифровой вычислительной машиной (ЦВМ) и командной радиолинией, а также бортовую аппаратуру командной радиолинии КА. После выведения КА на целевую орбиту измеряют параметры его орбиты либо по измерениям наземных измерительных пунктов, либо по измерениям аппаратуры спутниковой навигации. Полученные измерения параметров орбиты передают на наземный автоматизированный комплекс управления. Кроме того, в ЦВМ наземного автоматизированного комплекса управления вводят координаты точки стояния РЛС с исследуемой приемо-передающей ФАР. Далее по измеренным параметрам орбиты КА при помощи ЦВМ наземного автоматизированного комплекса управления осуществляют прогнозирование параметров движения центра масс КА и расчет целеуказаний для РЛС с исследуемой приемо-передающей ФАР. Вместе с тем с помощью навигационных приемников АСН определяют фактическую ориентацию КА в гринвичской (прямоугольной) системе координат. Полученные по измерениям АСН результаты ориентации КА передают на наземный автоматизированный комплекс управления. По результатам прогнозирования параметров движения центра масс КА и введенным в ЦВК НАКУ координатам точки стояния РЛС с исследуемой приемо-передающей ФАР при помощи ЦВМ НАКУ осуществляют расчет орбитальной программы ориентации КА с трехгранным УО на временном интервале нахождения КА в зоне радиовидимости РЛС с исследуемой приемо-передающей ФАР, при которой максимум основного лепестка индикатрисы рассеяния УО, который жестко закреплен в корпусе КА, направлен по линии визирования данной РЛС. Перед вхождением КА с УО в зону радиовидимости с наземного автоматизированного комплекса управления по линии связи передают целеуказания для РЛС с исследуемой приемо-передающей ФАР, которые загружаются в систему управления исследуемой приемо-передающей ФАР. Кроме того, в БВС КА по радиолинии загружают орбитальную программу ориентации КА с трехгранным УО в зоне радиовидимости РЛС с исследуемой приемо-передающей ФАР. При входе КА в зону радиовидимости РЛС по введенной в БВС орбитальной программе ориентации двигателями ориентации КА осуществляют его ориентирование, при котором максимум основного лепестка индикатрисы рассеяния УО, который жестко закреплен в корпусе КА постоянно направлен по линии визирования РЛС с исследуемой приемо-передающей ФАР. Одновременно исследуемая приемо-передающая ФАР нацеливается в направление (по целеуказаниям), заданное расчетными координатами космического аппарата с УО. Далее устанавливают луч исследуемой приемо-передающей ФАР в направлении КА с УО таким образом, чтобы максимум главного лепестка диаграммы направленности ФАР был направлен на максимум основного лепестка индикатрисы рассеяния трехгранного уголкового отражателя. Затем осуществляют измерение амплитуды принятого отраженного сигнала при различных углах рассогласования между направлением максимума главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР и направлением на КА с трехгранным УО, причем после каждого измерения амплитуды отраженного сигнала от трехгранного УО при различных углах рассогласования дополнительно измеряют амплитуду принятого отраженного сигнала при нулевом рассогласовании. Кроме того, измеренные амплитуды отраженных сигналов от трехгранного УО регистрируют и по измеренным значениям амплитуды принятого отраженного сигнала измеряют диаграмму направленности исследуемой приемо-передающей ФАР. При этом ось трехгранного УО в течение времени нахождения КА в зоне обслуживания РЛС исследуемой приемо-передающей ФАР при помощи системы ориентации КА удерживают в направлении на данную РЛС. В силу этого максимум основного лепестка индикатрисы рассеяния трехгранного УО направлен на РЛС с исследуемой приемо-передающей ФАР в течение всего сеанса измерений диаграммы направленности.
Таким образом, обеспечивается постоянство мощности отраженного сигнала от трехгранного уголкового отражателя в направлении РЛС с исследуемой приемо-передающей ФАР в течение сеанса измерений диаграммы направленности.
Кроме того, измерение амплитуды принятого отраженного сигнала при различных углах рассогласования между направлением максимума главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР РЛС и основным лепестком индикатрисы рассеяния трехгранного уголкового отражателя вблизи его максимума для каждого дискретного значению угла рассогласования проводят n раз, где n - число измерений.
Кроме того, измеренные значения амплитуды принятого отраженного сигнала при различных углах рассогласования между направлением максимума главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР РЛС и основным лепестком индикатрисы рассеяния трехгранного уголкового отражателя вблизи его максимума для каждого дискретного значения угла рассогласования усредняют по формуле:
где Bi - измеренные значения амплитуды принятого отраженного сигнала;
n - число измерений для каждого дискретного значения угла рассогласования.
Кроме того, измерение амплитуды принятого отраженного сигнала при нулевом рассогласовании после каждого шага перемещения луча ФАР на дискретное значение угла рассогласования проводят m раз, где m - число измерений.
Кроме того, измеренные значения амплитуды принятого отраженного сигнала при нулевом рассогласовании усредняют по формуле:
где Ai - измеренные значения амплитуды принятого отраженного сигнала при нулевом рассогласовании;
m - число измерений амплитуды принятого отраженного сигнала при нулевом рассогласовании.
Кроме того, при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы GPS и/или «ГЛОНАСС».
Кроме того, при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы GALILEO и/или «ГЛОНАСС».
Кроме того, при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы GALILEO и/или GPS.
Кроме того, при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы BeiDou и/или «ГЛОНАСС».
Кроме того, при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы BeiDou и/или GPS.
Кроме того, при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы BeiDou и/или GALILEO.
Кроме того, измерения диаграммы направленности исследуемой приемо-передающей ФАР радиолокационной станции проводятся в зоне обслуживания РЛС в секторе сканирования в азимутальной и угломестной плоскостях при движении КА с трехгранным УО по орбите.
Кроме того, задают набор направлений главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР, охватывающий сектор сканирования фазированной антенной решетки в азимутальной и угломестной плоскостях.
Кроме того, устанавливают главный лепесток диаграммы направленности исследуемой приемо-передающей ФАР в одно из направлений и осуществляют измерение амплитуды принятого отраженного сигнала при различных углах рассогласования между выбранным направлением максимума главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР и направлением на КА с трехгранным уголковым отражателем. При этом операции повторяют, каждый раз устанавливая главный лепесток диаграммы направленности исследуемой приемо-передающей ФАР в другие направления в секторе сканирования исследуемой приемо-передающей фазированной антенной решетки в азимутальной и угломестной плоскостях.
Предлагаемый способ поясняется чертежами фиг. 1 - фиг. 5.
Фиг. 1 - космический аппарат с трехгранным уголковым отражателем с треугольными гранями (вид сзади),
где 1 - трехгранный уголковый отражатель; 2 - ребра трехгранного уголкового отражателя; 3 - несмежные ребра правильной шестигранной прямой призмы корпуса КА; 4 - корпус КА в виде правильной шестигранной прямой призмы; 5 - продольная ось корпуса КА.
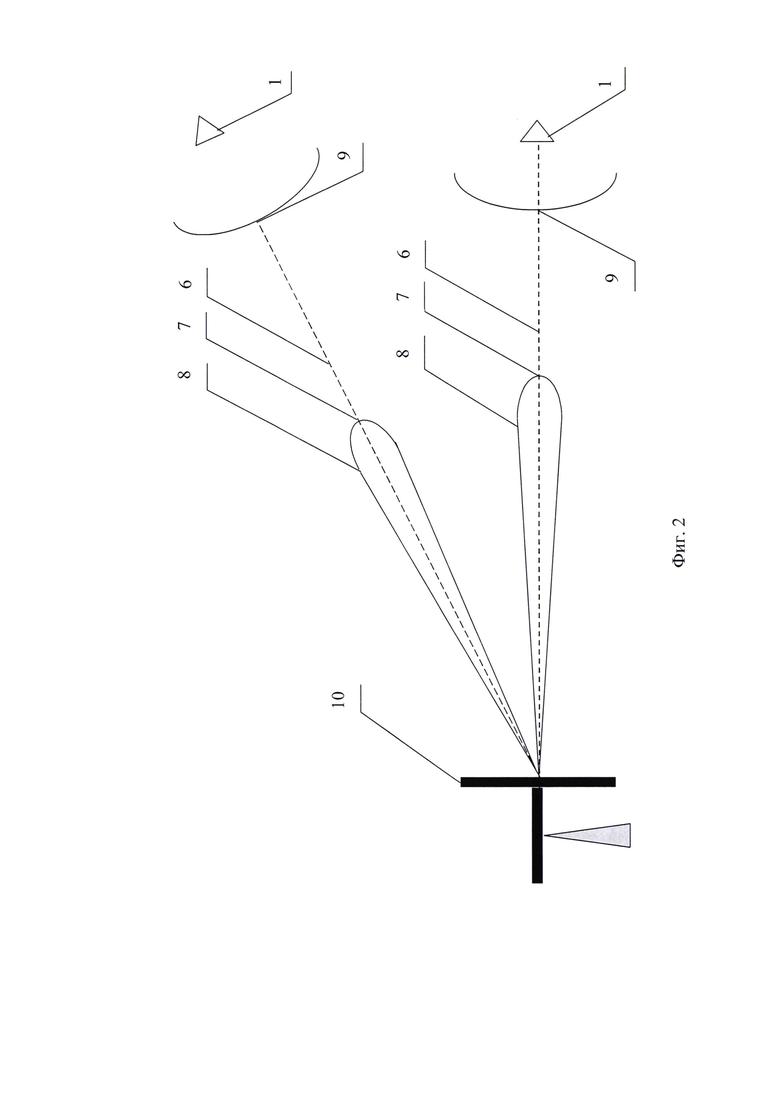
Фиг. 2 - схема проведения измерения диаграммы направленности РЛС с ФАР (при нулевом рассогласовании),
где 1 - трехгранный уголковый отражатель; 6 - линия визирования РЛС; 7 - максимум главного лепестка диаграммы направленности ФАР; 8 - диаграмма направленности ФАР; 9 - максимум основного лепестка индикатрисы рассеяния трехгранного уголкового отражателя; 10 - ФАР.
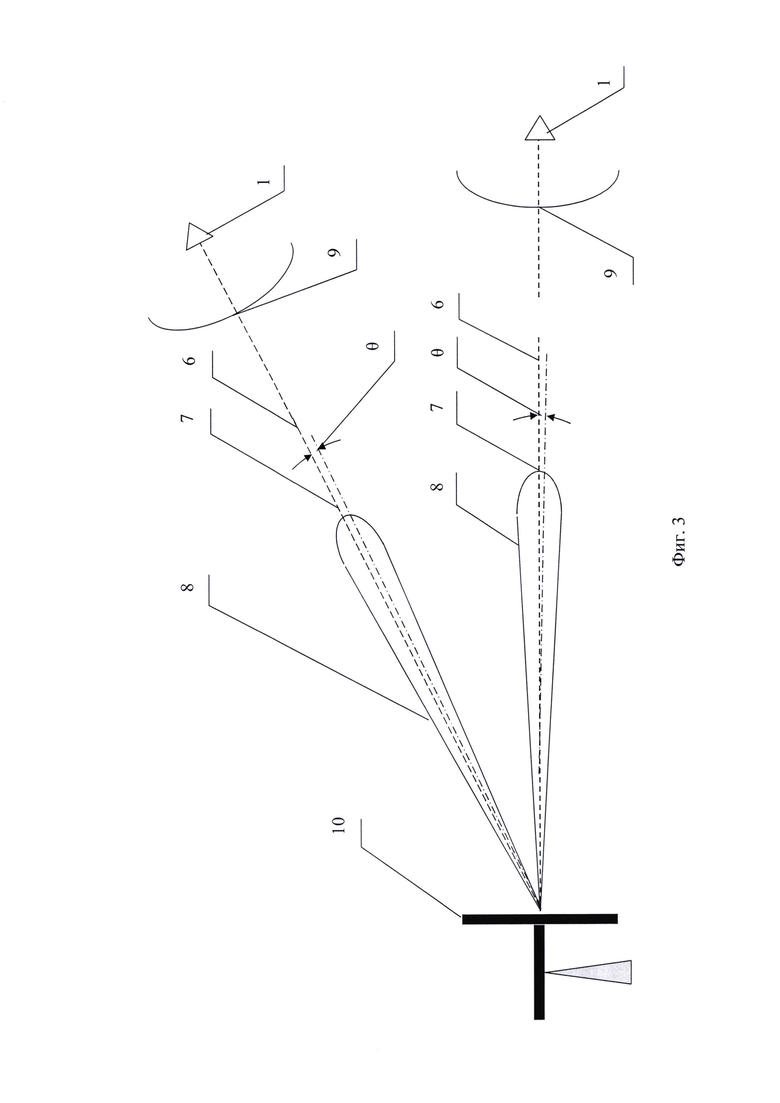
Фиг. 3 - схема проведения измерения диаграммы направленности РЛС с ФАР (при перемещении луча на шаг θ),
где 1 - трехгранный уголковый отражатель; 6 - линия визирования РЛС; 7 - максимум главного лепестка диаграммы направленности ФАР; θ - шаг перемещения луча ФАР; 8 - диаграмма направленности ФАР; 9 - максимум основного лепестка индикатрисы рассеяния трехгранного уголкового отражателя; 10 - ФАР.
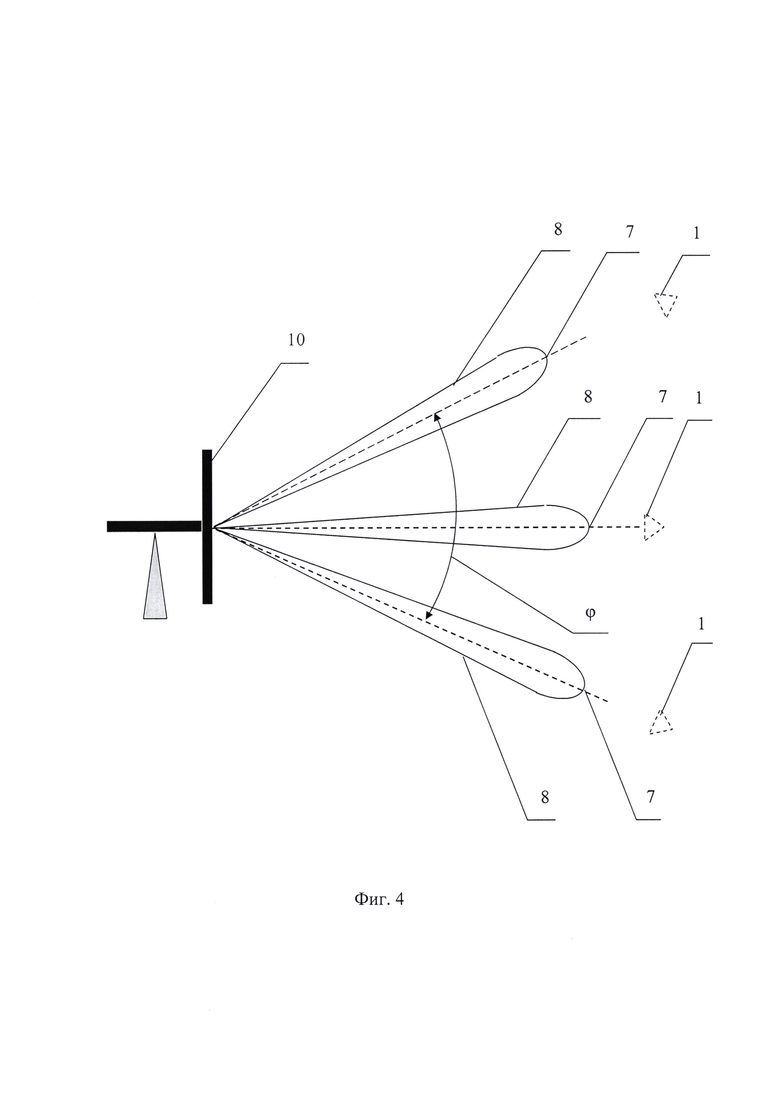
Фиг. 4 - схема проведения измерения диаграммы направленности РЛС с ФАР,
где 1 - трехгранный уголковый отражатель; 7 - максимум главного лепестка диаграммы направленности ФАР; 8 - диаграмма направленности ФАР; ϕ - сектор сканирования ФАР по азимуту.
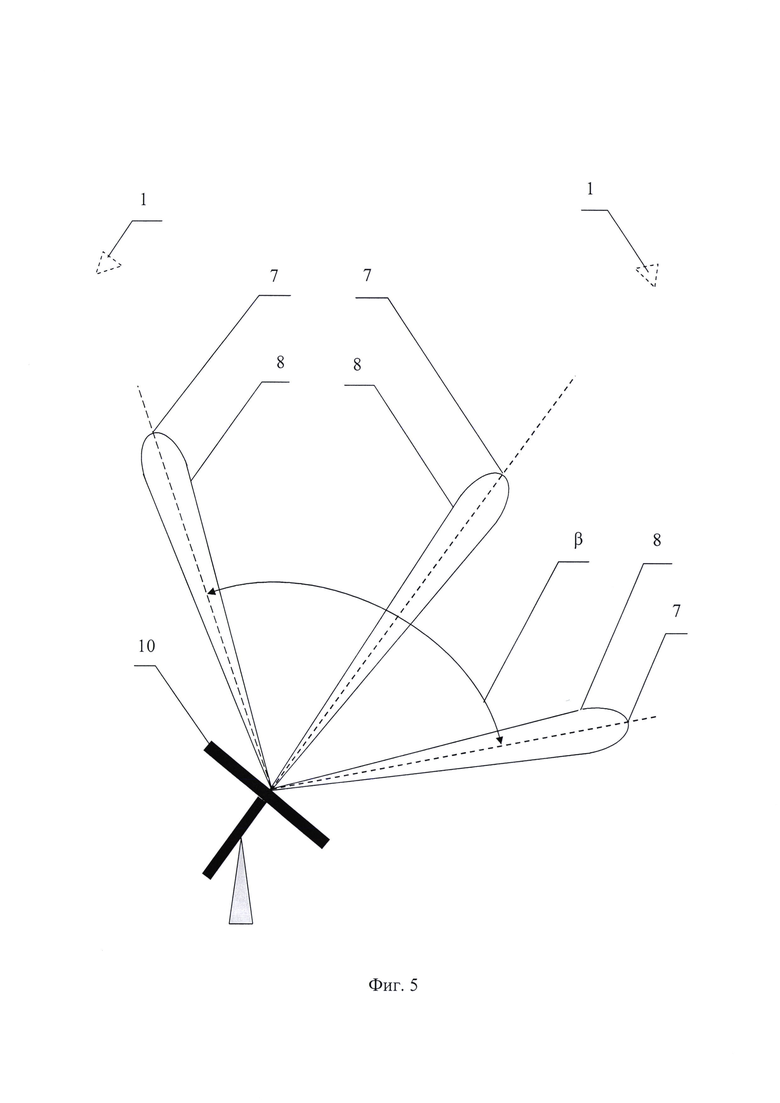
Фиг. 5 - схема проведения измерения диаграммы направленности РЛС с ФАР,
где 1 - трехгранный уголковый отражатель; 7 - максимум главного лепестка диаграммы направленности ФАР; 8 - диаграмма направленности ФАР; β - сектор сканирования ФАР по углу места.
Предложенный способ реализуется следующим образом. На орбиту вокруг Земли транспортируют КА, корпус которого изготавливают в виде правильной шестигранной прямой призмы. Причем на одном из оснований правильной шестигранной прямой призмы выполняют паз или углубление в форме правильной треугольной пирамиды. В паз или в углубление жестко закрепляют трехгранный уголковый отражатель с треугольными или секторными гранями из плоских взаимоперпендикулярных радиоотражающих пластин [4] стр. 158. При этом ось трехгранного уголкового отражателя [5] стр. 373 совмещают с высотой правильной треугольной пирамиды и с продольной осью корпуса КА. Кроме того, ребра трехгранного уголкового отражателя размещают в одной плоскости с тремя несмежными ребрами правильной шестигранной прямой призмы корпуса КА (фиг. 1).
Также в КА включают аппаратуру командной радиолинии, аппаратуру спутниковой навигации, бортовую вычислительную систему.
Для управления КА используют наземный автоматизированный комплекс управления с цифровой вычислительной машиной и командной радиолинией, а также бортовую аппаратуру командной радиолинии КА. После выведения КА на целевую орбиту измеряют параметры его орбиты либо по измерениям наземных измерительных пунктов, либо по измерениям аппаратуры спутниковой навигации [7] стр. 124-129. Полученные измерения параметров орбиты передают на наземный автоматизированный комплекс управления. Кроме того, в ЦВМ НАКУ вводят координаты точки стояния РЛС с исследуемой приемо-передающей ФАР. Далее по измеренным параметрам орбиты КА при помощи ЦВМ НАКУ осуществляют прогнозирование параметров движения центра масс КА и расчет целеуказаний для РЛС с исследуемой приемо-передающей ФАР [6] стр. 218-224, [8] стр. 455-463, [13] стр. 199-241. Вместе с тем с помощью навигационных приемников АСН определяют фактическую ориентацию КА в гринвичской (прямоугольной) системе координат [11] стр. 33-42, [12] стр. 613-641. Полученные по измерениям АСН данные фактической ориентации КА передают на наземный автоматизированный комплекс управления.
Для проведения измерений диаграммы направленности приемо-передающей фазированной антенной решетки РЛС в течение всего сеанса измерений используется режим орбитальной ориентации КА, при котором обеспечивается направленность максимума основного лепестка индикатрисы рассеяния УО по линии визирования РЛС. При этом трехгранный УО жестко закреплен в корпусе КА и его ориентация в пространстве, обуславливающая и ориентацию максимума основного лепестка индикатрисы рассеяния УО, соответствует ориентации КА. В силу этого отклонения основного лепестка индикатрисы рассеяния УО от линии визирования РЛС будут определяться ошибками ориентации КА. Как показано в [4] стр. 174, рис. 4.22 величина ЭПР и соответственно мощность отраженного сигнала вблизи максимума основного лепестка индикатрисы рассеяния трехгранного уголкового отражателя практически постоянна. Причем сектор углов основного лепестка индикатрисы рассеяния трехгранного уголкового отражателя в горизонтальной и вертикальной плоскостях, в котором его ЭПР является практически постоянной величиной, составляет 3°(±1,5°), [4] стр. 174, рис. 4.22.
При этом система управления ориентацией современных КА направляет оборудование (в данном случае УО) на любую наземную цель, в том числе РЛС, с точностью выше 0,1 градус [9] стр. 667. При таких условиях система ориентации и стабилизации КА обеспечивает постоянство мощности отраженного от трехгранного уголкового отражателя сигнала во время проведения измерения ДНА приемо-передающей антенны РЛС с ФАР.
По результатам прогнозирования параметров движения центра масс КА и введенным в ЦВМ НАКУ координатам точки стояния РЛС с исследуемой приемо-передающей ФАР при помощи ЦВМ наземного автоматизированного комплекса управления осуществляют расчет орбитальной программы ориентации КА с трехгранным УО на временном интервале нахождения КА в зоне радиовидимости РЛС с исследуемой приемо-передающей ФАР. При выполнении данной программы ориентации КА во время сеанса измерений максимум основного лепестка индикатрисы рассеяния УО будет направлен по линии визирования РЛС с исследуемой приемо-передающей ФАР.
Перед вхождением КА с УО в зону радиовидимости с наземного автоматизированного комплекса управления по линии связи передают целеуказания для РЛС с исследуемой приемо-передающей ФАР, которые загружаются в систему управления исследуемой приемо-передающей ФАР.
Кроме того, в бортовую вычислительную систему КА по радиолинии загружают орбитальную программу ориентации КА с трехгранным УО в зоне радиовидимости РЛС с исследуемой приемо-передающей ФАР.
При входе КА с УО в зону радиовидимости РЛС по введенной в БВС орбитальной программе ориентации двигателями ориентации КА осуществляют его ориентирование. В результате максимум основного лепестка индикатрисы рассеяния УО, который жестко закреплен в корпусе КА, постоянно направлен по линии визирования РЛС с исследуемой приемопередающей ФАР.
Одновременно, когда КА проходит через зону видимости РЛС, исследуемая приемо-передающая ФАР нацеливается в направлении, заданном расчетными координатами космического аппарата с УО [9] стр. 535.
Далее устанавливают луч исследуемой приемо-передающей ФАР в направлении КА с трехгранным уголковым отражателем 1 таким образом, чтобы максимум главного лепестка диаграммы направленности ФАР 7 был направлен на максимум основного лепестка индикатрисы рассеяния трехгранного уголкового отражателя 9 (фиг. 2).
При этом КА с трехгранным уголковым отражателем облучается передающим выходом исследуемой приемо-передающей ФАР, а приемным входом принимается отраженный сигнал.
Затем измеряют амплитуду отраженного сигнала с направления максимума главного лепестка 7 диаграммы направленности ФАР (фиг. 2). Далее электронным сканированием луча ФАР производится смещение максимума главного лепестка 7 диаграммы направленности ФАР на угол θ, являющимся шагом перемещения луча ФАР, где θ - угол между максимумом главного лепестка 7 диаграммы направленности ФАР и максимумом основного лепестка индикатрисы рассеяния трехгранного уголкового отражателя 9 (фиг. 3). Вновь производится излучение, прием, запись отраженных сигналов. Последующим шагом электронным сканированием луча ФАР максимум главного лепестка 7 диаграммы направленности ФАР возвращают в направление максимума основного лепестка индикатрисы рассеяния трехгранного уголкового отражателя 9 (нулевое рассогласование) и измеряют амплитуду отраженного сигнала (фиг. 2). Далее электронным сканированием луча ФАР производят смещение главного лепестка диаграммы направленности ФАР на углы 2θ, 3θ, 4θ, …, kθ и цикл измерений повторяют, причем электронное сканирование луча ФАР осуществляется последовательно вправо, влево, вверх, вниз в двух плоскостях (двумерной угловой области). Затем операции повторяют, каждый раз устанавливая луч фазированной антенной решетки в очередные положения луча ФАР в секторе сканирования в азимутальной и угломестной плоскости исследуемой приемопередающей ФАР. Причем после каждого измерения отраженного сигнала при отклонении луча ФАР на угол kθ дополнительно измеряют амплитуду принятого отраженного сигнала при нулевом рассогласовании, то есть с направления, при котором максимум главного лепестка диаграммы направленности ФАР совпадает с направлением максимума основного лепестка индикатрисы рассеяния трехгранного УО.
В результате отклонения главного максимума диаграммы направленности исследуемой приемо-передающей ФАР от направления на основной лепесток индикатрисы рассеяния трехгранного УО вблизи его максимума изменяется мощность, а соответственно и амплитуда принимаемого сигнала в соответствии с формой диаграммы направленности приемо-передающей ФАР.
Измеренные отраженные сигналы от трехгранного уголкового отражателя регистрируют и по зарегистрированным значениям принятого отраженного сигнала измеряют диаграмму направленности приемопередающей ФАР.
При этом в течение всего сеанса измерений продольную ось корпуса КА, совпадающую с осью трехгранного уголкового отражателя, при помощи системы ориентации КА удерживают в направлении на РЛС. В результате максимум основного лепестка индикатрисы рассеяния трехгранного УО будет находиться на линии визирования данной РЛС.
Следует отметить, что использование трехгранного уголкового отражателя, обладающего большой ЭПР, позволяет получить достаточное отношение сигнал/шум для обеспечения точности измерений. Так, например, трехгранный уголковый отражатель с треугольными гранями 125 см на волне 3,2 см имеет максимальную ЭПР около 104 м2 [4] стр. 179.
Кроме того, за счет механически более жесткой конструкции уголкового отражателя [4] с. 236 обеспечивается стабильное значение ЭПР в направлении к оси его раскрыва, а в результате обеспечивается стабильная величина мощности отраженного сигнала в направлении на РЛС с ФАР, что повышает точность измерений.
Измерение амплитуды принятого сигнала при нулевом рассогласовании в каждом цикле измерений позволяет учитывать изменения уровня отраженного сигнала, не связанные с диаграммой направленности исследуемой приемо-передающей ФАР. При этом учитываются и компенсируются изменения отраженного сигнала, связанные с изменением расстояния от РЛС до трехгранного уголкового отражателя, временной нестабильностью мощности передатчика РЛС или нестабильностью параметров атмосферы и/или стратосферы и/или ионосферы на трассе распространения радиоволн от РЛС до КА с УО и обратно. Тем самым также повышается точность измерений.
Многократное измерение значений амплитуды отраженного сигнала при нулевом рассогласовании и при различных углах рассогласования (θ, 2θ, 3θ, 4θ, …, kθ) в каждом цикле измерений между направлением главного максимума диаграммы направленности исследуемой приемопередающей ФАР и основным лепестком индикатрисы рассеяния трехгранного уголкового отражателя и последующая статистическая обработка единичных измерений амплитуды отраженного сигнала уменьшает случайные погрешности, а следовательно, повышает точность измерений. В результате Вср и Аср существенно точнее единичных значений Bi и Ai, а именно - случайные погрешности уменьшатся в  раз, где n - число результатов единичных измерений.
раз, где n - число результатов единичных измерений.
Из вышеизложенного следует, что предложенное техническое решение имеет преимущество по сравнению с известными способами и позволяет проводить измерения ДН ФАР в процессе функционирования РЛС без использования дополнительного источника сигнала и вспомогательной антенны и, кроме того, позволяет повысить точность измерения диаграммы направленности приемо-передающей фазированной антенной решетки радиолокационной станции.
Кроме того, применение предлагаемого способа измерения диаграммы направленности приемо-передающей фазированной антенной решетки позволяет «обслуживать» большое число РЛС, расположенных на значительной территории, как стационарных, так и подвижных РЛС наземного и морского базирования, благодаря способности быстрого перенацеливания КА с УО. Для этого необходимо по результатам прогноза орбиты КА при помощи ЦВМ НАКУ произвести расчет орбитальной ориентации КА с трехгранным УО на временном интервале нахождения КА в зоне радиовидимости заданной РЛС. Затем передать с наземного автоматизированного комплекса управления на борт КА орбитальную программу ориентации КА с трехгранным УО в периоды радиовидимости РЛС. При этом поддержание ориентации максимума основного лепестка индикатрисы рассеяния трехгранного УО на выбранную радиолокационную станцию выполняется двигателями ориентации КА [11] стр. 156. Кроме того, при помощи ЦВМ наземного автоматизированного комплекса управления необходимо произвести расчет целеуказаний для РЛС с исследуемой приемопередающей ФАР. Затем по линии связи передать целеуказания для заданной РЛС.
Важнейшей и неотъемлемой частью реализации предлагаемого способа измерения диаграммы направленности приемо-передающей фазированной антенной решетки радиолокационной станции является баллистико-навигационное обеспечение (БНО) космического полета.
Основные задачи БНО управления полетом можно разделить на два направления:
- непосредственное определение для изменения параметров движения КА в пространстве в текущий или заранее заданный моменты времени;
- получение всех сопутствующих баллистических данных при предположении известного движения КА.
Наибольшие сложности возникают при решении задач первого направления, так как они охватывают всю динамику движения КА.
Задачи второго направления связаны с расчетом «стандартной баллистической информации» (СБИ). Номенклатура их весьма обширна, начиная от времени существования КА и кончая такими специфическими вопросами, как, например, определение времени или высоты его полета над каким-то районом Земли, определение освещенности КА на орбите и.т.д. Получение СБИ не столь сложно, так как основано на самых общих законах космической баллистики с учетом возможной специфики конкретных объектов [8] стр. 455.
Стандартная баллистическая информация - информация, не связанная с непосредственным определением движения КА, но знание которой необходимо для выполнения разного рода экспериментов и проведения планирования полета, а также обеспечения условий, при которых происходит движение КА и совершается та или иная операция [8] стр. 457.
Номенклатура задач этой группы весьма обширна. В частности, можно выделить следующие задачи, связанные с расчетом:
- времени существования КА на орбите, зон радиовидимости КА со станций слежения и подготовки целеуказаний;
- баллистических данных для планирования работы средств командно-измерительного комплекса;
- данных для привязки научных (специальных) измерений, полученных с помощью данного КА;
- времени и высот прохождения над каким-то районом Земли и.т.п.Расчетные алгоритмы основных задач СБИ приведены в [8] стр. 458-463.
Предлагаемый способ измерения диаграммы направленности приемопередающей фазированной антенной решетки радиолокационной станции позволяет получить новое техническое решение, в том числе благодаря реализации возможностей АСН в решении задач навигации и ориентации на орбитальном участке КА с целевой нагрузкой [7] стр. 13-14 в сочетании с использованием стандартной баллистической информации (баллистико-навигационному обеспечению космического полета).
Источники информации
1. Патент RU №2343495 «Способ определения диаграммы направленности фазированной антенной решетки». Опубл. 10.01.2009. Бюл. №1. 2009.
2. Патент RU №2709417 «Способ определения диаграммы направленности фазированной антенной решетки». Опубл. 17.12.2019. Бюл. №35. 2019.
3. Грибанов А.Н., Гаврилова С.Е., Дорофеев А.Е., Мосейчук Г.Ф., Алексеев О.С. «Метод измерения динамических диаграмм направленности пассивных и активных фазированных антенных решеток». Вестник Концерна ВКО «Алмаз - Антей». №4. 2016. С. 32-34.
4. Кобак В.О. Радиолокационные отражатели / под ред. Леонтьевского О.Н. М.: Советское радио. 1975. С. 158, с. 174, с. 179, с. 235-236.
5. Справочник по радиолокации / под ред. Сколник М.И. Т. 1. Основы радиолокации / под ред. Ицхоки Я.С. М.: Советское радио. 1976. С. 373.
6. Лысенко Л.Н., Бетанов В.В., Звягин Ф.В. Теоретические основы баллистико-навигационного обеспечения космических полетов. М.: МГТУ им. Н.Э. Баумана. 2016. С. 5, с. 38-56, с. 96, с. 126-161, с. 216-278, с. 295-310.
7. Микрин Е.А., Михайлов М.В. Навигация космических аппаратов по измерениям от глобальных спутниковых навигационных систем. М.: МГТУ им. Н.Э. Баумана. 2018. С. 13-34, с. 124-129, с. 174-198.
8. Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических аппаратов. М.: МГТУ им. Н.Э. Баумана. 2016. С. 207, с. 438-444, с. 455-463.
9. Разработка систем космических аппаратов / под ред. Фортескью П., Старка Дж., Суайнерда Г.М.: Альпина Паблишер. 2018. С. 535-537, с. 667.
10. Леонов А.И., Леонов С.А., Нагулинко Ф.В. и др. Испытания РЛС / под ред. Леонова А.И. М.: Радио и связь. 1990. С. 55-57, с. 82-88.
11. Микрин Е.А., Михайлов М.В. Ориентация, выведение, сближение и спуск космических аппаратов по измерениям от глобальных спутниковых навигационных систем. М.: МГТУ им. Н.Э. Баумана. 2018. С. 33-42, с. 156, с. 337-349.
12. Бакитько Р.В., Болденков Е.Н., Булавский Н.Т. и др. ГЛОНАСС. Принципы построения и функционирования / под ред. Перова А.И., Харисова В.Н. М.: Радиотехника. 2010. С. 613-641.
13. Тюлин А.Е., Бетанов В.В., Юрасов B.C., Стрельников С.В. Навигационно-баллистическое обеспечение полета ракетно-космических средств. Системный анализ ИБО. Кн. 2. Монография. М.: Радиотехника. 2018. С. 213-241.
14. Немировский М.С., Локшин Б.А., Аронов Д.А. Основы построения систем спутниковой связи / под ред. Немировского М.С. М.: Горячая линия - Телеком. 2016. С. 35-56.
Изобретение относится к измерительной технике и служит для измерения диаграммы направленности (ДН) приемо-передающей фазированной антенной решетки (ФАР) радиолокационной станции (РЛС). Технический результат заключается в обеспечении измерения ДН ФАР в процессе функционирования РЛС без использования дополнительного источника сигнала и вспомогательной антенны. Технический результат достигается тем, что предложен способ измерения ДН приемо-передающей ФАР РЛС, согласно изобретению передающим выходом приемо-передающей ФАР РЛС излучают сигнал в направлении отражателя, расположенного в дальней зоне ФАР, приемным входом ФАР принимают отраженный сигнал, измеряют амплитуду отраженного сигнала, причем предварительно на орбиту вокруг Земли транспортируют КА, корпус которого изготавливают в виде правильной шестигранной прямой призмы, причем на одном из оснований призмы выполняют углубление в форме правильной треугольной пирамиды, в которое жестко закрепляют трехгранный уголковый отражатель (УО) с треугольными или секторными гранями из плоских взаимоперпендикулярных радиоотражающих пластин, по измеренным значениям амплитуды отраженного сигнала определяют диаграмму направленности ФАР РЛС. 13 з.п. ф-лы, 5 ил.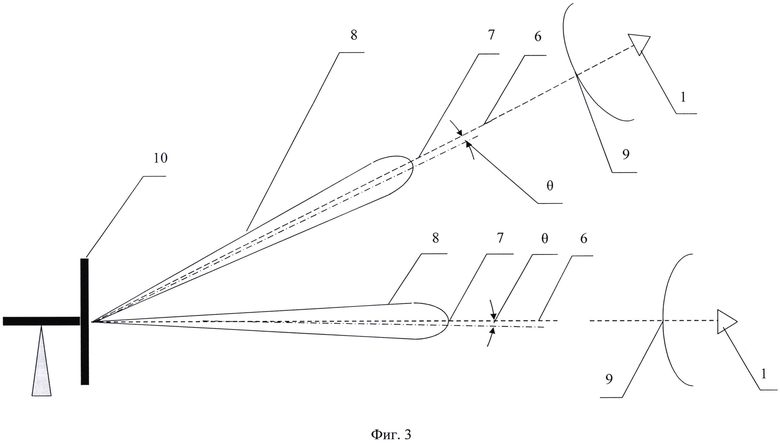
1. Способ измерения диаграммы направленности приемо-передающей фазированной антенной решетки радиолокационной станции, отличающийся тем, что передающим выходом приемо-передающей фазированной антенной решетки (ФАР) радиолокационной станции (РЛС) излучают сигнал в направлении отражателя, расположенного в дальней зоне ФАР, приемным входом ФАР принимают отраженный сигнал, измеряют амплитуду отраженного сигнала, причем предварительно на орбиту вокруг Земли транспортируют космический аппарат (КА), корпус которого изготавливают в виде правильной шестигранной прямой призмы, причем на одном из оснований призмы выполняют паз или углубление в форме правильной треугольной пирамиды, в который или в которое жестко закрепляют трехгранный уголковый отражатель (УО) с треугольными или секторными гранями из плоских взаимоперпендикулярных радиоотражающих пластин, при этом ось трехгранного УО совмещают с высотой правильной треугольной пирамиды и с продольной осью корпуса КА, а ребра трехгранного УО размещают в одной плоскости с тремя несмежными ребрами правильной шестигранной прямой призмы, кроме того, в КА включают аппаратуру командной радиолинии, аппаратуру спутниковой навигации (АСН), бортовую вычислительную систему (БВС), вместе с тем для управления КА используют наземный автоматизированный комплекс управления (НАКУ) с цифровой вычислительной машиной (ЦВМ) и командной радиолинией, а также бортовую аппаратуру командной радиолинии КА, после выведения КА на целевую орбиту измеряют параметры его орбиты либо по измерениям наземных измерительных пунктов, либо по измерениям АСН, полученные измерения параметров орбиты передают на НАКУ, кроме того, в ЦВМ НАКУ вводят координаты точки стояния РЛС с исследуемой приемо-передающей ФАР, далее по измеренным параметрам орбиты КА при помощи ЦВМ НАКУ осуществляют прогнозирование параметров движения центра масс КА и расчет целеуказаний для РЛС с исследуемой приемо-передающей ФАР, вместе с тем с помощью навигационных приемников АСН определяют фактическую ориентацию КА в гринвичской прямоугольной системе координат, полученные по измерениям АСН результаты ориентации КА передают на НАКУ, где по результатам прогнозирования параметров движения центра масс КА и введенным в ЦВМ НАКУ координатам точки стояния РЛС с исследуемой приемо-передающей ФАР при помощи ЦВМ НАКУ осуществляют расчет орбитальной программы ориентации КА с трехгранным УО на временном интервале нахождения КА в зоне радиовидимости РЛС с исследуемой приемо-передающей ФАР, при которой максимум основного лепестка индикатрисы рассеяния УО, который жестко закреплен в корпусе КА, направлен по линии визирования данной РЛС, перед вхождением КА с УО в зону радиовидимости с НАКУ по линии связи передают целеуказания для РЛС с исследуемой приемо-передающей ФАР, которые загружаются в систему управления исследуемой приемо-передающей ФАР, кроме того, в БВС КА по радиолинии загружают орбитальную программу ориентации КА с трехгранным УО в зоне радиовидимости РЛС с исследуемой приемо-передающей ФАР, при входе КА в зону радиовидимости РЛС по введенной в БВС желательной программе ориентации двигателями ориентации КА осуществляют его ориентирование, при котором максимум основного лепестка индикатрисы рассеяния УО, который жестко закреплен в корпусе КА, постоянно направлен по линии визирования РЛС с исследуемой приемо-передающей ФАР, одновременно исследуемая приемо-передающая ФАР нацеливается в направление, заданное расчетными координатами космического аппарата с УО, далее устанавливают луч исследуемой приемо-передающей ФАР в направлении КА с УО таким образом, чтобы максимум главного лепестка диаграммы направленности ФАР был направлен на максимум основного лепестка индикатрисы рассеяния трехгранного УО, затем осуществляют измерение амплитуды принятого отраженного сигнала при различных углах рассогласования между направлением максимума главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР и направлением на КА с трехгранным УО, причем после каждого измерения амплитуды отраженного сигнала от трехгранного УО при различных углах рассогласования дополнительно измеряют амплитуду принятого отраженного сигнала при нулевом рассогласовании, кроме того, измеренные амплитуды отраженных сигналов от трехгранного УО регистрируют и по измеренным значениям амплитуды принятого отраженного сигнала измеряют диаграмму направленности исследуемой приемо-передающей ФАР, при этом ось трехгранного УО в течение времени нахождения КА в зоне обслуживания РЛС исследуемой приемо-передающей ФАР при помощи системы ориентации КА удерживают в направлении на данную РЛС, в результате чего максимум основного лепестка индикатрисы рассеяния трехгранного УО направлен на РЛС с исследуемой приемо-передающей ФАР в течение всего сеанса измерений диаграммы направленности.
2. Способ по п. 1, отличающийся тем, что измерение амплитуды принятого отраженного сигнала при различных углах рассогласования между направлением максимума главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР и основным лепестком индикатрисы рассеяния трехгранного УО вблизи его максимума для каждого дискретного значения угла рассогласования проводят n раз, где n - число измерений.
3. Способ по п. 2, отличающийся тем, что измеренные значения амплитуды принятого отраженного сигнала при различных углах рассогласования между направлением максимума главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР и основным лепестком индикатрисы рассеяния трехгранного УО вблизи его максимума для каждого дискретного значения угла рассогласования усредняют по формуле:
где Bi - измеренные значения амплитуды принятого отраженного сигнала;
n - число измерений для каждого дискретного значения угла рассогласования.
4. Способ по п. 1, отличающийся тем, что измерение амплитуды принятого отраженного сигнала при нулевом рассогласовании после каждого шага перемещения луча ФАР на дискретное значение угла рассогласования проводят m раз, где m - число измерений.
5. Способ по п. 4, отличающийся тем, что измеренные значения амплитуды принятого отраженного сигнала при нулевом рассогласовании усредняют по формуле:
где Ai - измеренные значения амплитуды принятого отраженного сигнала при нулевом рассогласовании;
m - число измерений амплитуды принятого отраженного сигнала при нулевом рассогласовании.
6. Способ по п. 1, отличающийся тем, что при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы GPS и/или «ГЛОНАСС».
7. Способ по п. 1, отличающийся тем, что при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы GALILEO и/или «ГЛОНАСС».
8. Способ по п. 1, отличающийся тем, что при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы GALILEO и/или GPS.
9. Способ по п. 1, отличающийся тем, что при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы BeiDou и/или «ГЛОНАСС».
10. Способ по п. 1, отличающийся тем, что при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы BeiDou и/или GPS.
11. Способ по п. 1, отличающийся тем, что при осуществлении измерений параметров орбиты КА аппаратурой спутниковой навигации используют приемники навигационной системы BeiDou и/или GALILEO.
12. Способ по п. 1, отличающийся тем, что измерения диаграммы направленности исследуемой приемо-передающей ФАР радиолокационной станции проводятся в зоне обслуживания РЛС в секторе сканирования ФАР в азимутальной и угломестной плоскостях при движении КА с трехгранным УО по орбите.
13. Способ по пп. 1-5, 12, отличающийся тем, что задают набор направлений главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР РЛС, охватывающий сектора сканирования ФАР в азимутальной и угломестной плоскостях.
14. Способ по п. 13, отличающийся тем, что устанавливают главный лепесток диаграммы направленности исследуемой приемо-передающей ФАР в одно из направлений и осуществляют измерение амплитуды принятого отраженного сигнала при различных углах рассогласования между выбранным направлением максимума главного лепестка диаграммы направленности исследуемой приемо-передающей ФАР и направлением на КА с трехгранным УО, причем операции повторяют, каждый раз устанавливая главный лепесток диаграммы направленности исследуемой приемо-передающей ФАР последовательно в остальные направления в секторе сканирования исследуемой ФАР в азимутальной и угломестной плоскостях.
| Способ определения диаграммы направленности фазированной антенной решетки | 2019 |
|
RU2709417C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2006 |
|
RU2343495C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ НАВИГАЦИОННОГО СПУТНИКА | 2018 |
|
RU2687512C1 |
| US 10067172 B1, 04.09.2018 | |||
| ГРИБАНОВ А.Н | |||
| et al | |||
| "МЕТОД ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ДИАГРАММ НАПРАВЛЕННОСТИ ПАССИВНЫХ И АКТИВНЫХ ФАЗИРОВАННЫХ АНТЕННЫХ РЕШЕТОК", ВЕСТНИК КОНЦЕРНА ВКО "АЛМАЗ-АНТЕЙ", 2016. | |||

