Изобретение относится к области радиолокации и может быть использовано для калибровки радиолокационных станций (РЛС) по величине эффективной поверхности рассеяния (ЭПР) при проведении динамических измерений ЭПР баллистических и космических объектов [1, стр.144], [2].
Известен способ калибровки радиолокационной станции, который заключается в следующем: запускают искусственный спутник Земли (ИСЗ) сферической формы, облучают его сигналами калибруемой РЛС, принимают и измеряют амплитуды отраженных от ИСЗ сигналов, которые используют как соответствующие эталонному значению ЭПР отражателя [1, стр.204-213].
Недостатком данного способа является невозможность его использования для калибровки по величине ЭПР радиолокаторов, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, так как для таких радиолокаторов отражатель сферической формы невидим [3, стр.103]. Другим недостатком способа с использованием сферического отражателя как эталона ЭПР для РЛС, работающих на волнах горизонтальной, вертикальной, а также круговой поляризации при ортогональном приеме отраженных сигналов, является малая ЭПР сферы [3, стр.235]. Кроме того, изготовить сферу больших размеров с высокой точностью чрезвычайно сложно, а вывести на орбиту почти невозможно [4, стр.51].
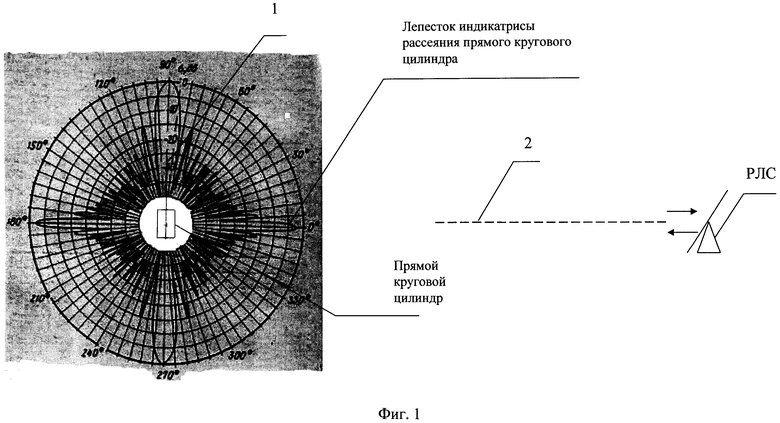
Наиболее близким аналогом изобретения является способ, в котором в качестве эталонного рассеивателя используется прямой круговой цилиндр [1, стр.206]. Такой цилиндр выводится на околоземную орбиту и ему задается «кувыркательное» движение таким образом, чтобы его продольная ось 1 была ориентирована перпендикулярно линии визирования 2 радиолокационной станции (см. фиг.1). Цилиндр облучают сигналами калибруемой РЛС, принимают отраженные сигналы и при ориентации прямого кругового цилиндра вблизи от этого направления проводят измерения амплитуд отраженных сигналов, которые могут позволить уточнить калибровку радиолокационной станции [1, стр.206-213]. Однако такой способ имеет невысокую точность, так как в направлении, нормальном оси цилиндра, прямой круговой цилиндр обладает узким лепестком индикатрисы рассеяния [1, стр.19-20], [3, стр.235]. При этом сектор углов, используемый для калибровки РЛС по величине ЭПР, вблизи максимума лепестка индикатрисы рассеяния прямого кругового цилиндра не превышает долей градуса. Вследствие этого, даже достаточно малое отклонение оси прямого кругового цилиндра от нормального по отношению к линии визирования РЛС влечет за собой резкое уменьшение мощности и, соответственно, амплитуды сигналов, отраженных от прямого кругового цилиндра, что приводит к ошибкам калибровки РЛС по величине ЭПР. Так, например, ошибка ориентации направления, нормального оси прямого кругового цилиндра диаметром 1,2 м и длиной 3 м относительно линии визирования РЛС, на 1,5 градуса в дециметровом диапазоне работы РЛС приводит к ошибкам калибровки по величине ЭПР на 5 дБ [1, стр.211]. С уменьшением длины волны РЛС, при тех же размерах цилиндра, происходит существенное сужение основного лепестка индикатрисы рассеяния в направлении, перпендикулярном оси прямого кругового цилиндра [5, стр.75-77]. В результате чего ошибка ориентации продольной оси прямого кругового цилиндра в направлении, перпендикулярном линии визирования РЛС, в сантиметровом диапазоне работы РЛС приводит к еще более значительным ошибкам калибровки РЛС по величине ЭПР.
При этом сам сеанс калибровки очень непродолжителен. Например, если период «кувыркания» прямого кругового цилиндра составляет 10 минут (600 секунд) [1, стр.213], то время, в течение которого можно проводить сеанс калибровки вблизи направления ориентации оси цилиндра перпендикулярно направлению на калибруемую РЛС, в дециметровом диапазоне длин волн составит менее двух секунд, а в сантиметровом - менее одной секунды. Такой временной интервал сеанса калибровки не позволяет осуществить достаточное количество единичных измерений отраженного сигнала от прямого кругового цилиндра для проведения статистической обработки результатов измерений, что также снижает точность калибровки РЛС по величине ЭПР.
Кроме того, использовать прямой круговой цилиндр в качестве эталона не всегда возможно, так как такой эталон имеет значительные размеры и вес [4, стр.37], что не позволяет транспортировать его на околоземную орбиту попутными запусками [1, стр.211].
Технический результат предлагаемого изобретения заключается в повышении точности калибровки РЛС по величине ЭПР за счет исключения ошибки, вызванной отклонением максимума ЭПР эталонного отражателя от линии визирования РЛС.
Указанный технический результат достигается тем, что в способе калибровки РЛС по миниспутнику с эталонным значением эффективной поверхности рассеяния, включающем в себя: запуск отражателя с известной величиной ЭПР на орбиту вокруг Земли, облучение отражателя сигналами калибруемой РЛС, прием и измерение амплитуды отраженных сигналов от отражателя, находящегося в дальней зоне антенны РЛС, новым является то, что для калибровки РЛС по величине ЭПР в качестве эталона эффективной поверхности рассеяния на орбиту вокруг Земли транспортируют миниспутник, содержащий корпус в виде прямой призмы 3 и двух плоских радиоотражающих шарнирно связанных граней 4 и 5, при этом радиоотражающие грани шарнирно закрепляют на смежных боковых гранях прямой призмы (см. фиг.2).
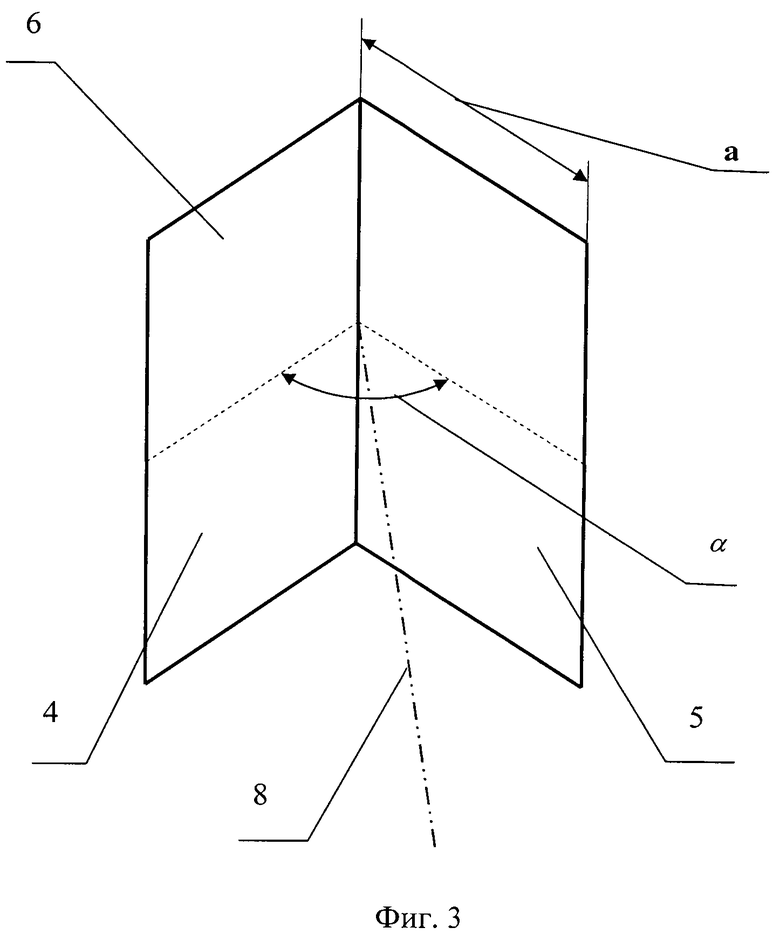
Кроме того, радиоотражающие грани 4 и 5 разворачивают относительно друг друга так, что они образуют двугранный уголковый отражатель 6, ребро которого параллельно боковому ребру 7 прямой призмы 3, причем угол α между гранями уголкового отражателя задают в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой РЛС;
а - размер грани уголкового отражателя (см. фиг.2, фиг.3).
Уголковый отражатель ориентируют так, что биссектриса угла 8 двугранного уголкового отражателя находится на одной прямой с биссектрисой угла 9 многоугольника, образованного перпендикулярным сечением прямой призмы 10, проходящим через середину бокового ребра призмы 11. Причем вершина угла двугранного уголкового отражателя и вершина угла многоугольника, образованного перпендикулярным сечением прямой призмы, лежат на одной прямой (см. фиг.2, фиг.4).
Предварительно, до запуска миниспутника на орбиту вокруг Земли, определяют координаты середины ребра 11 и положение биссектрисы угла 8 двугранного уголкового отражателя в связанной системе координат миниспутника, затем вводят их в память бортовой вычислительной машины. Наряду с этим в память бортовой вычислительной машины вводят данные о координатах j-x радиолокационных станций, подлежащих калибровке по величине эффективной поверхности рассеяния, в геодезической системе координат, где j - целое число, равное или большее единицы.
До запуска миниспутника на орбиту вокруг Земли плоские радиоотражающие грани 4, 5 уголкового отражателя складывают параллельно смежным боковым граням прямой призмы и фиксируют в сложенном положении (см. фиг.5).
После выведения миниспутника на целевую орбиту в процессе полета с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и бортовой вычислительной машины программно выбирают РЛС, в зоне радиовидимости которой находится миниспутник.
Определяют положение центра масс миниспутника относительно местоположения выбранной калибруемой радиолокационной станции, а также ориентацию осей связанной системы координат миниспутника относительно линии визирования калибруемой радиолокационной станции. Одновременно бортовой вычислительной машиной производят расчет и определяют пространственное положение биссектрисы угла двугранного уголкового отражателя относительно линии визирования калибруемой радиолокационной станции на текущий момент времени. По расчетным данным бортовой вычислительной машины системой ориентации миниспутника осуществляют совмещение занесенного в память бортовой вычислительной машины положения биссектрисы угла 8 двугранного уголкового отражателя с линией визирования 2 калибруемой радиолокационной станции 12 (см. фиг.6). При их совмещении по сигналу, вырабатываемому бортовой вычислительной машиной, освобождают грани уголкового отражателя от фиксации и разворачивают относительно друг друга на угол α, величина которого лежит в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой радиолокационной станции;
а - размер грани уголкового отражателя (см. фиг.7).
Далее жестко фиксируют грани уголкового отражателя при данном значении угла α. Затем при помощи системы ориентации миниспутника удерживают совмещение биссектрисы угла 8 двугранного уголкового отражателя 6 с линией визирования 2 калибруемой радиолокационной станции 12 до момента окончания сеанса калибровки. При этом основной лепесток индикатрисы рассеяния 13 двугранного уголкового отражателя 6 направлен на калибруемую радиолокационную станцию 12, а максимум основного лепестка индикатрисы рассеяния 14 двугранного уголкового отражателя совпадает с линией визирования 2 калибруемой радиолокационной станции 12 (см. фиг.7).
Перед сеансом калибровки радиолокационной станции по величине эффективной поверхности рассеяния или во время сеанса проводят калибровку приемников радиолокационной станции с помощью калиброванных генераторов, подключаемых к высокочастотному входу приемников радиолокационной станции. Регистрируют зависимость значений амплитуд сигнала на выходе приемников радиолокационной станции от относительного значения мощности сигнала, представляющего собой отношение сигнал/шум, на входе приемников радиолокационной станции и получают калибровочный график (см. фиг.8).
Осуществляют калибровку радиолокационной станции по величине эффективной поверхности рассеяния, а именно, выполняют сеанс калибровки на интервале времени ΔT:
ΔT=t2j-t1j,
где t1j - время начала сеанса калибровки j-й радиолокационной станции;
t2j - время окончания сеанса калибровки j-й радиолокационной станции;
j - целое число, равное или большее единицы, причем ΔТ определяется временем нахождения миниспутника в зоне радиовидимости калибруемой радиолокационной станции.
Измеренные амплитуды отраженных сигналов от уголкового отражателя регистрируют, а потом по калибровочному графику зависимости значений амплитуд сигнала на выходе приемников радиолокационной станции от относительного значения мощности на входе приемников радиолокационной станции пересчитывают в значения относительной мощности сигналов, отраженных от уголкового отражателя.
Кроме того, с помощью калибруемой радиолокационной станции измеряют наклонную дальность до миниспутника.
Кроме того, значения относительной мощности отраженных от уголкового отражателя сигналов приводят к фиксированной дальности, например 100 км, путем перерасчета по формуле:
Pi=Bi+40Log Ri/100,
где Bi - единичное измеренное значение относительной мощности отраженного сигнала от двугранного уголкового отражателя;
Ri - единичное измеренное калибруемой радиолокационной станцией значение наклонной дальности до миниспутника, соответствующее данному Bi.
Кроме того, приведенные к фиксированной дальности единичные значения относительной мощности отраженных сигналов от двугранного уголкового отражателя усредняют по формуле:

где n - число результатов единичных измерений на интервале времени ΔТ.
Кроме того, усредненное значение Рср используют как значение относительной мощности отраженных сигналов, соответствующее эталонному значению эффективной поверхности рассеяния двугранного уголкового отражателя.
Кроме того, радиоотражающие грани шарнирно закрепляют на одной из боковых граней прямой призмы.
Кроме того, до запуска миниспутника на орбиту вокруг Земли плоские радиоотражающие грани уголкового отражателя складывают параллельно одной из боковых граней прямой призмы.
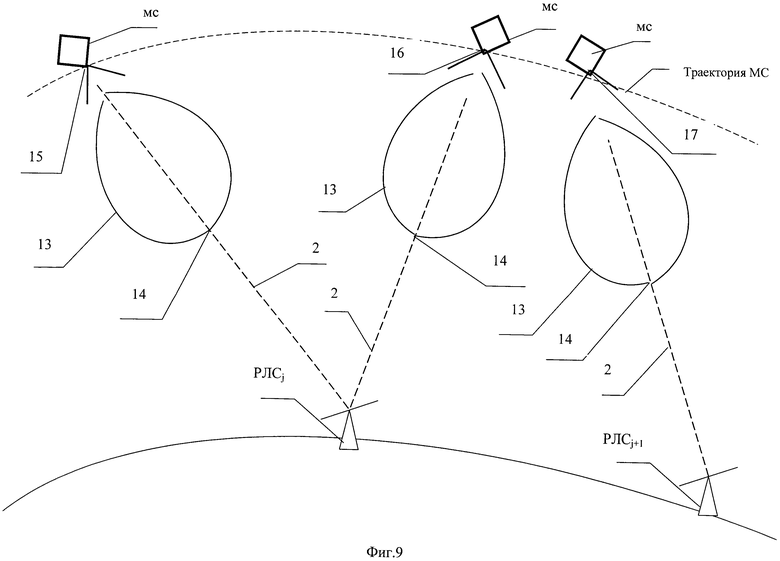
Кроме того, по окончании сеанса калибровки выбранной j-й радиолокационной станции по заданной программе с помощью бортовой вычислительной машины выбирают следующую находящуюся по трассе полета миниспутника (j+1) радиолокационную станцию, в зоне радиовидимости которой находится миниспутник, определяют положение центра масс миниспутника относительно местоположения (j+1) радиолокационной станции, а также ориентацию осей связанной системы координат миниспутника относительно линии визирования (j+1) радиолокационной станции, бортовой вычислительной машиной производят расчет и определяют пространственное положение биссектрисы угла двугранного уголкового отражателя относительно линии визирования (j+1) радиолокационной станции на текущий момент времени, по расчетным данным бортовой вычислительной машины системой ориентации миниспутника осуществляют совмещение положения биссектрисы угла двугранного уголкового отражателя с линией визирования (j+1) радиолокационной станции и повторяют сеанс калибровки.
Предлагаемый способ поясняется чертежами фиг.2 - фиг.9.
Фиг.2 - миниспутник с развернутыми радиоотражающими гранями.
Фиг.3 - двугранный уголковый отражатель с гранями, развернутыми на угол α.
Фиг.4 - положение биссектрисы угла 8 двугранного уголкового отражателя 6 относительно биссектрисы угла 9 многоугольника, образованного перпендикулярным сечением прямой призмы 10 при различных формах основания призмы.
Фиг.5 - миниспутник со сложенными гранями перед запуском на орбиту вокруг Земли.
Фиг.6 - относительное положение миниспутника и калибруемой РЛС до раскрытия граней.
Фиг.7 - относительное положение миниспутника и калибруемой РЛС 12 после раскрытия граней уголкового отражателя 6, где 8 - биссектриса угла двугранного уголкового отражателя 6, 13 - основной лепесток индикатрисы рассеяния уголкового отражателя 6, а 14 - максимум основного лепестка индикатрисы УО.
Фиг.8 - калибровочный график зависимости значений амплитуд сигнала Ai на выходе приемников РЛС от относительного значения мощности Bi сигнала на входе приемников РЛС.
Фиг.9 - схема проведения сеанса калибровки РЛС, где 2 - линия визирования калибруемой РЛС, 14 - максимум основного лепестка индикатрисы рассеяния уголкового отражателя, позиция 15 - положение калибровочного миниспутника в момент времени, соответствующий началу сеанса калибровки j-й РЛС, а позиция 16 - положение калибровочного миниспутника, соответствующее моменту времени окончания сеанса калибровки j-й РЛС, позиция 17 - положение калибровочного миниспутника в момент времени, соответствующий началу сеанса калибровки РЛСj+1.
Предложенный способ реализуется следующим образом. На этапе подготовки к запуску миниспутника на орбиту вокруг Земли плоские грани уголкового отражателя из радиоотражающего материала разворачивают относительно друг друга на заданный угол α в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой РЛС;
а - размер грани уголкового отражателя.
При этом уголковый отражатель ориентируют так, что биссектриса угла двугранного уголкового отражателя находится на одной прямой с биссектрисой угла многоугольника, образованного перпендикулярным сечением прямой призмы, проходящим через середину бокового ребра призмы. Причем вершина угла двугранного уголкового отражателя и вершина угла многоугольника, образованного перпендикулярным сечением прямой призмы, лежат на одной прямой.
Определяют координаты середины ребра и положение биссектрисы угла двугранного уголкового отражателя в связанной системе координат миниспутника. Затем вводят их в память бортовой вычислительной машины. Наряду с этим в память бортовой вычислительной машины вводят данные о координатах j-x радиолокационных станций, подлежащих калибровке по величине эффективной поверхности рассеяния, в геодезической системе координат, где j - целое число, равное или большее единицы.
Кроме того, до запуска миниспутника на орбиту плоские радиоотражающие грани уголкового отражателя складывают параллельно смежным боковым граням прямой призмы и фиксируют в сложенном положении. Таким образом, обеспечивается минимальный объем, занимаемый миниспутником перед выводом на целевую орбиту.
В дальнейшем миниспутник выводится на целевую орбиту. Так как местоположение калибруемых радиолокационных станций на поверхности Земли априорно известно, то для обеспечения калибровки радиолокационных станций параметры орбиты миниспутника рассчитываются таким образом, чтобы обеспечить «пролет» миниспутника в зоне радиовидимости калибруемых радиолокационных станций. Эта задача решается организационными методами при планировании запуска калибровочного миниспутника путем задания необходимых значений наклонения и высоты орбиты. Так, например, для регулярного наблюдения калибровочных космических аппаратов всеми радиолокационными станциями ракетно-космической обороны (РКО), расположенными на территории России, наклонение орбит должно быть не меньше 80 градусов [8].
После выведения миниспутника на целевую орбиту с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и бортовой вычислительной машины по заранее заданной программе выбирают РЛС, в зоне радиовидимости которой находится миниспутник. Определяют положение центра масс миниспутника относительно местоположения выбранной калибруемой радиолокационной станции, а также ориентацию осей связанной системы координат миниспутника относительно линии визирования калибруемой радиолокационной станции. Одновременно бортовой вычислительной машиной производят расчет и определяют пространственное положение биссектрисы угла двугранного уголкового отражателя относительно линии визирования калибруемой радиолокационной станции на текущий момент времени.
По расчетным данным бортовой вычислительной машины системой ориентации миниспутника осуществляют совмещение положения биссектрисы угла двугранного уголкового отражателя в связанной системе координат миниспутника, введенного в память бортовой вычислительной машины, с линией визирования калибруемой радиолокационной станции. При их совмещении по сигналу, вырабатываемому бортовой вычислительной машиной, освобождают грани уголкового отражателя от фиксации и разворачивают относительно друг друга на угол α, величина которого лежит в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой радиолокационной станции;
а - размер грани уголкового отражателя.
В дальнейшем жестко фиксируют грани уголкового отражателя при данном значении угла α.
Затем при помощи системы ориентации миниспутника удерживают совмещение биссектрисы угла двугранного уголкового отражателя с линией визирования калибруемой радиолокационной станции до момента окончания сеанса калибровки. При этом основной лепесток индикатрисы рассеяния двугранного уголкового отражателя направлен на калибруемую радиолокационную станцию, а максимум основного лепестка индикатрисы рассеяния двугранного уголкового отражателя совпадает с линией визирования калибруемой радиолокационной станции.
Перед сеансом калибровки радиолокационной станции по величине эффективной поверхности рассеяния или во время сеанса проводят калибровку приемников радиолокационной станции одним из известных методов калибровки радиотехнических устройств [1, стр.194], [8] с помощью калиброванных генераторов, подключаемых к высокочастотному входу приемников радиолокационной станции [2]. Регистрируют зависимость значений амплитуд сигнала на выходе приемников радиолокационной станции от относительного значения мощности сигнала, представляющего собой отношение сигнал/шум, на входе приемников радиолокационной станции и получают калибровочный график.
Осуществляют калибровку радиолокационной станции по величине эффективной поверхности рассеяния, а именно, выполняют сеанс калибровки на интервале времени ΔТ:
ΔТ=t2j-t1j,
где t1j - время начала сеанса калибровки j-й радиолокационной станции;
t2j - время окончания сеанса калибровки j-й радиолокационной станции;
j - целое число, равное или большее единицы, причем ΔТ определяется временем нахождения миниспутника в зоне радиовидимости калибруемой радиолокационной станции.
При этом измеренные амплитуды отраженных сигналов от уголкового отражателя регистрируют и измеряют.
В дальнейшем по калибровочному графику зависимости значений амплитуд сигнала на выходе приемников радиолокационной станции от относительного значения мощности на входе приемников радиолокационной станции пересчитывают в значения относительной мощности (отношения сигнал/шум) отраженных от уголкового отражателя сигналов с помощью известных формул интерполяции [6, стр.14-19].
Одновременно во время сеанса калибровки с помощью калибруемой РЛС измеряют наклонную дальность до миниспутника с УО, а значения относительной мощности отраженных от миниспутника с УО сигналов приводят к фиксированной дальности, например 100 км, путем перерасчета по формуле:
Pi=Bi+40Log Ri/100,
где Bi - единичное измеренное значение относительной мощности отраженного сигнала от уголкового отражателя;
Ri - единичное измеренное значение дальности калибруемой РЛС до отражателя, соответствующее данному Bi.
«Приведенные» к фиксированной дальности значения относительной мощности отраженных сигналов от уголкового отражателя усредняют по формуле:
где n - число результатов единичных измерений на интервале времени ΔТ.
Полученное усредненное значение Рср используют при измерениях ЭПР баллистических и космических объектов как значение относительной мощности отраженных сигналов, соответствующее эталонному значению ЭПР двугранного уголкового отражателя.
По окончании сеанса калибровки выбранной j-й радиолокационной станции по заданной программе с помощью бортовой вычислительной машины выбирают следующую находящуюся по трассе полета миниспутника (j+1) радиолокационную станцию, в зоне радиовидимости которой находится миниспутник. Определяют положение центра масс миниспутника относительно местоположения (j+1) радиолокационной станции, а также ориентацию осей связанной системы координат миниспутника относительно линии визирования (j+1) радиолокационной станции. Бортовой вычислительной машиной производят расчет и определяют пространственное положение биссектрисы угла двугранного уголкового отражателя относительно линии визирования (j+1) радиолокационной станции на текущий момент времени. По расчетным данным бортовой вычислительной машины системой ориентации миниспутника осуществляют совмещение положения биссектрисы угла двугранного уголкового отражателя с линией визирования (j+1) радиолокационной станции и повторяют сеанс калибровки.
Использование миниспутника, элементы конструкции которого образуют на целевой орбите двугранный уголковый отражатель с гранями, развернутыми на заданный угол α в диапазоне от (90-Δ) градусов до (90+Δ) градусов, позволяет достичь «уплощения» формы основного лепестка индикатрисы рассеяния уголкового отражателя в горизонтальной плоскости. При этом сектор углов индикатрисы рассеяния уголкового отражателя в горизонтальной плоскости, в котором его ЭПР практически не меняется, достигает ±10 градусов [3, стр.150, рис.4.7, кривые 2, 3].
Заданная ориентация миниспутника относительно РЛС и последующее удержание совмещения биссектрисы угла двугранного уголкового отражателя с линией визирования калибруемой радиолокационной станции до момента окончания сеанса калибровки обеспечивает стабильное значение ЭПР миниспутника с УО.
При реально достижимой точности ориентации и стабилизации миниспутника не более 0,5 градуса [10, стр.412], [11, стр.259], изменение ЭПР УО при локации в направлении максимума основного лепестка индикатрисы рассеяния калибровочного миниспутника не превышает 0,5 дБ, что обеспечит требуемую точность измерения ЭПР по отраженному сигналу не хуже 1 дБ [8, стр.9].
Определение пространственного положения биссектрисы угла двугранного уголкового отражателя относительно линии визирования калибруемой радиолокационной станции с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и бортовой вычислительной машины, а затем с помощью системы ориентации миниспутника совмещение с последующим удержанием биссектрисы угла двугранного уголкового отражателя с линией визирования РЛС в течение сеанса калибровки по величине ЭПР позволяет сохранить ориентацию максимума основного лепестка индикатрисы рассеяния УО вдоль линии визирования калибруемой радиолокационной станции и обеспечить постоянное значение ЭПР уголкового отражателя в направлении РЛС.
Проведение пересчета значений относительной мощности к стандартной дальности позволяет исключить зависимость выполняемых измерений от изменения расстояния между РЛС и миниспутником в течение сеанса калибровки РЛС по величине ЭПР.
Полученное в результате статистической обработки единичных измерений Рср существенно точнее единичного значения Pi, а именно: случайные погрешности уменьшатся в 
Использование в предлагаемом способе миниспутника небольшой массы и объема с отражателем с достаточно большой ЭПР для калибровки РЛС по величине ЭПР позволяет осуществлять его запуск в качестве попутной нагрузки, что снижает стоимость вывода миниспутника на орбиту.
Использование в качестве эталона ЭПР для калибровки РЛС уголкового отражателя, образованного из двух плоских радиоотражающих шарнирно связанных граней, расположенных на корпусе космического аппарата, позволяет реализовать предлагаемый способ с использованием космических аппаратов, имеющих корпус, например, в виде прямоугольного параллелепипеда. Такое техническое решение расширяет функциональные возможности КА и позволяет создавать миниспутники, которые помимо основных задач, к примеру дистанционного зондирования поверхности Земли, будут применяться для калибровки РЛС по величине ЭПР.
Из вышеизложенного следует, что предложенные технические решения имеют преимущества по сравнению с известными способами калибровки РЛС, а именно: позволяют повысить точность калибровки РЛС по величине ЭПР при проведении динамических измерений ЭПР баллистических и космических объектов.
Источники информации
1. Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей / Под ред. Колосова М.А. М.: Советское радио. 1972. С.19-20, с.144-145, с.178-179, с.193-194, с.204-213.
2. Олин (I.D.Olin). Динамические измерения радиолокационных поперечных сечений // ТИИЭР. 1965. Т.53. №8.
3. Кобак В.О. Радиолокационные отражатели / Под ред. Леонтьевского О.Н. М.: Советское радио. 1975. С.103, с.144, с.146, с.150, с.152, с.235.
4. Леонов А.И., Леонов С.А., Нагулинко Ф.В. и др. Испытания РЛС / Под ред. Леонова А.И. М.: Радио и связь. 1990. С.37, с.51.
5. Методы исследования радиолокационных характеристик объектов / Под ред. Ягольникова С.В. М.: Радиотехника. 2012. С.75-77.
6. Джонсон Н., Лион Ф. Статистика и планирование эксперимента в технике и науке. Методы обработки данных. М.: Мир. 1980. С.14-19.
7. Сколник М. Справочник по радиолокации Т.1 / Под ред. Ицхоки Я.С. М.: - Советское радио. 1976. С.356-397.
8. Бондаренко А.П., Курикша А.А., Суханов С.А., Фатеев В.Ф. К вопросу о создании группировки легких космических аппаратов для калибровки РЛС РКО // Успехи современной радиоэлектроники. 2010. №3. С.5-9.
9. Проверка радиоизмерительных приборов. Сборник инструкций, издание официальное. Стандартгиз. 1961.
10. Бакитько Р.В., Болденков Е.Н., Булавский Н.Т. и др. ГЛОНАСС. Принципы построения и функционирования / Под ред. Перова А.И., Харисова В.Н. М.: Радиотехника. 2010. С.412.
11. Малые космические аппараты информационного обеспечения / Под ред. Фатеева В.Ф. М.: Радиотехника. 2010. С.259.
12. Майсеня Л.И. Справочник по математике: основные понятия и формулы. Минск: Выш. шк. 2011. С.190-195.





Изобретение может быть использовано для калибровки радиолокационных станций (РЛС) по величине эффективной поверхности рассеяния (ЭПР). Достигаемый технический результат - повышение точности калибровки РЛС. Предлагаемый способ включает запуск на орбиту искусственного спутника Земли отражателя с известной величиной ЭПР, облучение отражателя сигналами РЛС, прием и измерение амплитуды отраженных сигналов. В качестве эталона ЭПР на орбиту искусственного спутника Земли транспортируют миниспутник (МС), содержащий корпус в виде прямой призмы и двух плоских радиоотражающих шарнирно связанных граней, при этом грани разворачивают относительно друг друга так, что они образуют двугранный уголковый отражатель (УО), ребро которого параллельно боковому ребру прямой призмы, причем угол α между гранями УО задают в определенном диапазоне градусов. В процессе полета с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и бортовой вычислительной машины (БВМ) по заданной программе выбирают РЛС, в зоне радиовидимости которой находится МС. Определяют положение центра масс МС относительно местоположения выбранной РЛС, а также ориентацию осей связанной системы координат МС относительно линии визирования РЛС. Одновременно БВМ производят расчет и определяют пространственное положение биссектрисы угла двугранного УО относительно линии визирования калибруемой РЛС, а затем системой ориентации МС осуществляют их совмещение, далее при помощи системы ориентации МС удерживают совмещение биссектрисы угла УО с линией визирования калибруемой РЛС до окончания сеанса калибровки, в результате максимум основного лепестка индикатрисы рассеяния УО совпадает с линией визирования калибруемой РЛС. 7 з.п. ф-лы, 9 ил.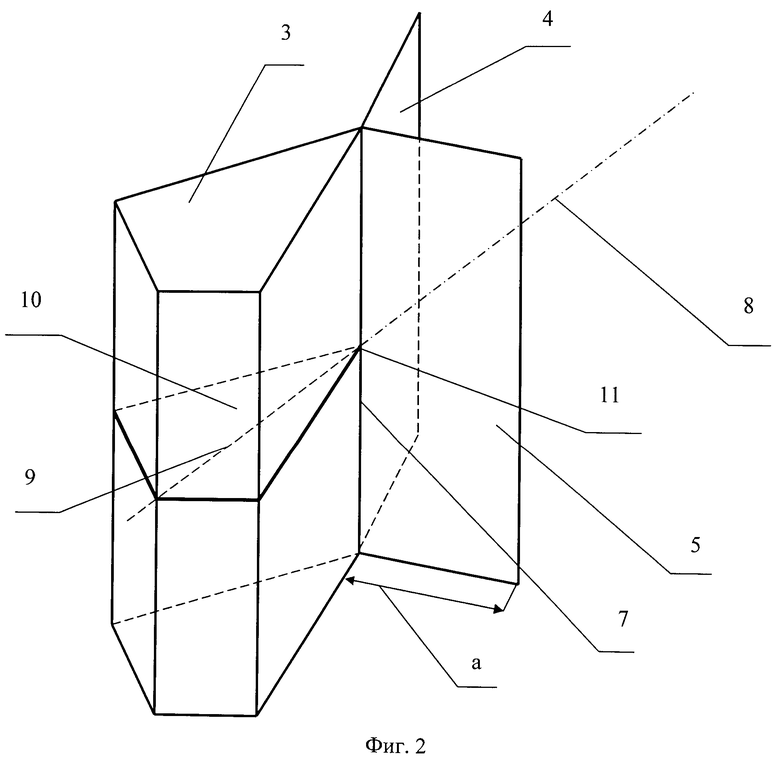
1. Способ калибровки радиолокационной станции по миниспутнику с эталонным значением эффективной поверхности рассеяния, заключающийся в том, что на орбиту вокруг Земли запускают отражатель с известной величиной эффективной поверхности рассеяния, облучают его сигналами калибруемой радиолокационной станции, принимают отраженные сигналы от отражателя, находящегося в дальней зоне антенны радиолокационной станции, измеряют амплитуды отраженных сигналов, отличающийся тем, что в качестве эталона эффективной поверхности рассеяния на орбиту вокруг Земли транспортируют миниспутник, содержащий корпус в виде прямой призмы и двух плоских радиоотражающих шарнирно связанных граней, при этом радиоотражающие грани шарнирно закрепляют на смежных боковых гранях прямой призмы, кроме того, радиоотражающие грани разворачивают относительно друг друга так, что они образуют двугранный уголковый отражатель, ребро которого параллельно боковому ребру прямой призмы, причем угол α между гранями уголкового отражателя задают в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой РЛС;
а - размер грани уголкового отражателя,
при этом уголковый отражатель ориентируют так, что биссектриса угла двугранного уголкового отражателя находится на одной прямой с биссектрисой угла многоугольника, образованного перпендикулярным сечением прямой призмы, проходящим через середину ее бокового ребра, причем вершина угла двугранного уголкового отражателя и вершина угла многоугольника, образованного перпендикулярным сечением прямой призмы, лежат на одной прямой, предварительно, до запуска миниспутника на орбиту вокруг Земли определяют координаты середины ребра двугранного уголкового отражателя и положение биссектрисы угла двугранного уголкового отражателя в связанной системе координат миниспутника, затем вводят их в память бортовой вычислительной машины, наряду с этим в память бортовой вычислительной машины вводят данные о координатах j-x радиолокационных станций, подлежащих калибровке по величине эффективной поверхности рассеяния, в геодезической системе координат, где j - целое число, равное или большее единицы, кроме того, до запуска миниспутника на орбиту, плоские радиоотражающие грани уголкового отражателя складывают параллельно смежным боковым граням прямой призмы и фиксируют в сложенном положении, после выведения миниспутника на целевую орбиту с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и бортовой вычислительной машины программно выбирают радиолокационную станцию, в зоне радиовидимости которой находится миниспутник, определяют положение центра масс миниспутника относительно местоположения выбранной калибруемой радиолокационной станции, а также ориентацию осей связанной системы координат миниспутника относительно линии визирования калибруемой радиолокационной станции, одновременно бортовой вычислительной машиной производят расчет и определяют пространственное положение биссектрисы угла двугранного уголкового отражателя относительно линии визирования калибруемой радиолокационной станции на текущий момент времени, по расчетным данным бортовой вычислительной машины системой ориентации миниспутника осуществляют совмещение положения биссектрисы угла двугранного уголкового отражателя в связанной системе координат миниспутника, введенного в память бортовой вычислительной машины, с линией визирования калибруемой радиолокационной станции и при их совмещении по сигналу, вырабатываемому бортовой вычислительной машиной, освобождают грани уголкового отражателя от фиксации и разворачивают относительно друг друга на угол α, величина которого лежит в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой радиолокационной станции;
а - размер грани уголкового отражателя,
далее жестко фиксируют грани уголкового отражателя при данном значении угла α, затем при помощи системы ориентации миниспутника удерживают совмещение биссектрисы угла двугранного уголкового отражателя с линией визирования калибруемой радиолокационной станции до момента окончания сеанса калибровки, при этом основной лепесток индикатрисы рассеяния двугранного уголкового отражателя направлен на калибруемую радиолокационную станцию, а максимум основного лепестка индикатрисы рассеяния двугранного уголкового отражателя совпадает с линией визирования калибруемой радиолокационной станции, кроме того, перед сеансом калибровки радиолокационной станции по величине эффективной поверхности рассеяния или во время сеанса проводят калибровку приемников радиолокационной станции с помощью калиброванных генераторов, подключаемых к высокочастотному входу приемников радиолокационной станции, регистрируют зависимость значений амплитуд сигнала на выходе приемников радиолокационной станции от относительного значения мощности сигнала, представляющего собой отношение сигнал/шум, на входе приемников радиолокационной станции и получают калибровочный график, осуществляют калибровку радиолокационной станции по величине эффективной поверхности рассеяния, а именно, выполняют сеанс калибровки на интервале времени ΔT:
ΔT=t2j-t1j,
где t1j - время начала сеанса калибровки j-й радиолокационной станции;
t2j - время окончания сеанса калибровки j-й радиолокационной станции;
j - целое число, равное или большее единицы, причем ΔТ определяется временем нахождения миниспутника в зоне радиовидимости калибруемой радиолокационной станции, при этом измеренные амплитуды отраженных сигналов от уголкового отражателя регистрируют, а потом по калибровочному графику зависимости значений амплитуд сигнала на выходе приемников радиолокационной станции от относительного значения мощности на входе приемников радиолокационной станции пересчитывают в значения относительной мощности сигналов, отраженных от уголкового отражателя.
2. Способ по п.1, отличающийся тем, что с помощью калибруемой радиолокационной станции измеряют наклонную дальность до миниспутника.
3. Способ по п.1, отличающийся тем, что значения относительной мощности отраженных от уголкового отражателя сигналов приводят к фиксированной дальности, например 100 км, путем перерасчета по формуле:
Pi=Bi+40Log Ri/100,
где Bi - единичное измеренное значение относительной мощности отраженного сигнала от двугранного уголкового отражателя;
Ri - единичное измеренное калибруемой радиолокационной станцией значение наклонной дальности до миниспутника, соответствующее данному Bi.
4. Способ по п.1, отличающийся тем, что приведенные к фиксированной дальности единичные значения относительной мощности отраженных сигналов от двугранного уголкового отражателя усредняют по формуле:
где n - число результатов единичных измерений на интервале времени ΔТ.
5. Способ по п.4, отличающийся тем, что усредненное значение Рср используют как значение относительной мощности отраженных сигналов, соответствующее эталонному значению эффективной поверхности рассеяния двугранного уголкового отражателя.
6. Способ по п.1, отличающийся тем, что радиоотражающие грани шарнирно закрепляют на одной из боковых граней прямой призмы.
7. Способ по п.1, отличающийся тем, что до запуска миниспутника на орбиту вокруг Земли плоские радиоотражающие грани уголкового отражателя складывают параллельно одной из боковых граней прямой призмы.
8. Способ по п.1, отличающийся тем, что по окончании сеанса калибровки выбранной j-й радиолокационной станции по заданной программе с помощью бортовой вычислительной машины выбирают следующую находящуюся по трассе полета миниспутника (j+1) радиолокационную станцию, в зоне радиовидимости которой находится миниспутник, определяют положение центра масс миниспутника относительно местоположения (j+1) калибруемой радиолокационной станции, а также ориентацию осей связанной системы координат миниспутника относительно линии визирования (j+1) калибруемой радиолокационной станции, одновременно бортовой вычислительной машиной производят расчет и определяют пространственное положение биссектрисы угла двугранного уголкового отражателя относительно линии визирования (j+1) калибруемой радиолокационной станции на текущий момент времени, по расчетным данным бортовой вычислительной машины системой ориентации миниспутника осуществляют совмещение положения биссектрисы угла двугранного уголкового отражателя с линией визирования (j+1) калибруемой радиолокационной станции и повторяют сеанс калибровки.
| Измерение характеристик рассеяния радиолокационных целей | |||
| Под ред | |||
| КОЛОСОВА М.А., Москва, Советское радио, 1972, с.19-20, 144-145,178-179, 193-194, 204-213 | |||
| СПОСОБ КАЛИБРОВКИ РАДИОЛОКАТОРА И РАДИОЛОКАТОР | 1996 |
|
RU2103706C1 |
| УСТРОЙСТВО ДЛЯ ДВУХПОЗИЦИОННЫХ ИЗМЕРЕНИЙ РАДИОЛОКАЦИОННЫХ ХАРАКТЕРИСТИК РАДИОПОГЛОЩАЮЩИХ ПОКРЫТИЙ | 2007 |
|
RU2353948C1 |
| JP 4827121 B2, 30.11.2011 | |||
| Устройство для разгрузки вагонов | 1974 |
|
SU518442A2 |
| US 20060220951 A1, 05.10.2006 | |||
| US 7091906 B2, 15.08.2006 | |||

