Изобретение относится к области космической техники, а точнее к системам управления угловым положением космических аппаратов (КА), в которых для построения орбитальной системы координат (ОСК) применяются бесплатформенные орбитальные гирокомпасы (БОГК). Назначение изобретения - обеспечение космическому аппарату свободы программных поворотов одновременно по каналам курса, тангажа и крена относительно ОСК без нарушения в процессе совершения программных поворотов режима орбитального гирокомпасирования, реализуемого БОГК.
В системах управления угловым положением орбитальных КА бесплатформенные орбитальные гирокомпасы нашли широкое применение, т.к. имеют простую структуру, обладают автономностью, удобны при восстановлении ориентации КА.
Уравнения движения, описывающие работу классического орбитального гирокомпаса (ОГК), имеют вид:

где γ, Ψ, ϑ - малые углы ориентации связанных осей КА относительно ОСК по крену, курсу и тангажу;
β, 


Δβ, Δθ - сигналы обратных связей, они же выходные сигналы ОГК в систему стабилизации (СС) КА по углу в каналах крена и тангажа, они же ошибки стабилизации по углу в каналах крена и тангажа;
γПМВ, ϑПМВ - выходные сигналы построителя местной вертикали (ПМВ) по крену и тангажу;
Δα - выходной сигнал ОГК стабилизации КА по углу в канале курса;

к1, к2, к3 - коэффициенты коррекции.
ОГК описан во многих источниках, например, в книге «Орбитальное гирокомпасирование» авторов В.А. Бесекерского, В.А. Иванова и Б.Б. Самотокина. СПб.: Политехника, 1993. 256 с.
В составе современных систем управления КА применяются бесплатформенные орбитальные гирокомпасы - БОГК, для практической реализации которых используют обращенные формулы, получаемые из (1):

где ωX, ωY, ωZ - угловые скорости КА относительно инерциальной системы координат (ИСК) в проекциях на связанные оси КА по крену, курсу и тангажу, измеряемые гироскопическими датчиками;
Δβ, 


БОГК работает совместно с системой угловой стабилизации КА, в качестве исполнительных органов в которой могут быть использованы двигатели-маховики, гиродины, реактивные сопла и др., с настройками контура стабилизации КА по углу и угловой скорости:

где τX, τY, τZ - сигналы (значения управляющих моментов), поступающие на исполнительные органы КА, например на маховики;
кβ, 


Формулы (1-2) работоспособны только для малых отклонений связанных осей КА и приборных осей БОГК относительно ОСК, для которых справедливы значения угловых скоростей:

где γ, 


поэтому для систем такого типа пространственные программные повороты КА невозможны без нарушения режима гирокомпасирования и потери устойчивого управления угловым положением КА. Иногда уравнения (2) называют наблюдателем ОГК.
Система управления КА с использованием БОГК, имеющим алгоритм в форме (2), описана также во многих зарубежных аналогах, например, в работе авторов А. Брайсона и В. Кортюма «Вычисление местного углового положения орбитального космического аппарата». Труды III Международного симпозиума ИФАК по автоматическому управлению в мирном использовании космического пространства. Управление в космосе т. 2, с. 83-105, Москва, «Наука», 1972 г.
Недостатком указанных систем является запрет на программные повороты КА относительно ОСК на углы курса, тангажа и крена.
За прототип можно принять систему управления угловым положением КА, предложенную в патенте РФ №2509690 от 20.03.2014 г., в которой реализовано устройство, позволяющее вращать КА на неограниченные программные углы по курсу, сохраняя при этом режим гирокомпасирования. Недостатком этой системы является принципиальное отсутствие возможности программных поворотов КА одновременно по другим каналам ориентации - крену и тангажу с сохранением устойчивого режима гирокомпасирования.
Целью изобретения является устранение указных недостатков, т.е. создание такой системы управления угловым положением КА, которая обеспечивает КА свободу программных поворотов одновременно по каналам курса, тангажа и крена относительно ОСК и сохраняет при этом устойчивую работу БОГК в режиме гирокомпасирования, а следовательно, устойчивое управление программным угловым положением КА в целом.
Для достижения поставленной цели в известное техническое решение, содержащее ПМВ, выход которого по крену подключен к последовательно соединенным первому сумматору, первому модулю усиления и преобразования (МУП), второму сумматору, третьему сумматору, первому интегратору, первому модулю настройки стабилизации КА по углу в канале крена (МНК-У) и четвертому сумматору, выход которого является входом исполнительных органов (ИО) КА в канале крена.
Содержащее в канале курса последовательно соединенные тот же первый сумматор, второй МУП, пятый сумматор, шестой сумматор, второй интегратор, второй модуль настройки стабилизации КА по углу в канале курса-рыскания (МНР-У), седьмой сумматор, выход которого является входом ИО КА в канале курса.
Содержащее в канале тангажа ПМВ, выход которого по тангажу подключен к последовательно соединенным восьмому сумматору, третьему МУП, девятому сумматору, третьему интегратору, третьему модулю настройки стабилизации КА по углу в канале тангажа (МНТ-У), десятому сумматору, выход которого является входом ИО КА в канале тангажа.
Содержащее модули настройки контура стабилизации КА по угловой скорости МНК-С, МНР-С, МНТ-С по соответственным каналам крена, курса-рыскания и тангажа, входы которых подключены к выходам соответственно третьего, шестого и девятого сумматоров, а выходы подключены ко вторым входам соответственно четвертого, седьмого и десятого сумматоров.
Содержащее первый и второй модули компенсации взаимовлияний каналов (МКВК), входы которых подключены к выходам первого и второго интеграторов соответственно, а выходы подключены к вторым входам соответственно шестого и третьего сумматоров.
Содержащее блок гироскопических измерителей угловых скоростей (БИУС), выходы которого по каналам крена, курса и тангажа подключены ко вторым входам соответственно второго, пятого и девятого сумматоров.
Для достижения поставленной цели в известное техническое решение введены новые функциональные элементы и связи.
В выходные цепи ПМВ по крену и тангажу введен модуль контроля ориентации (МКО) с функцией преобразования сигналов:


где γПМВ, ϑПМВ - сигналы ПМВ по крену и тангажу в программной системе координат (ПСК);
λ, µ, ε - углы программных поворотов КА относительно ОСК соответственно по курсу, тангажу и крену,
при этом первый и второй входы МОК по крену и тангажу подключены к соответственным выходам ПМВ, а выходы МОК по крену и тангажу подключены к входам первого и восьмого сумматоров соответственно.
В выходные цепи первого, второго и третьего интеграторов введен первый модуль прямого преобразования (МПП) углов стабилизации КА, первый, второй и третий входы которого подключены к выходам первого, второго и третьего интеграторов соответственно, а выходы подключены к входам соответственно МНК-У, МНР-У и МНТ-У и выполняющий функцию:

для последовательности поворотов λ, µ, ε.
Второй МПП угловых скоростей стабилизации КА введен в выходные цепи третьего, шестого и девятого сумматоров так, что его первый, второй и третий входы подключены соответственно к выходам третьего, шестого и девятого сумматоров, а его выходы по каналам крена, курса и тангажа подключены к первым входам вновь введенных одиннадцатого, двенадцатого и тринадцатого сумматоров соответственно, выходы которых подключены к входам соответственно МНК-С, МНР-С и МНТ-С, при этом второй МПП повторяет функцию первого МПП.
В выходные цепи БИУС введены четырнадцатый, пятнадцатый и шестнадцатый сумматоры, входы которых подключены к выходам БИУС соответственно по каналам крена, курса и тангажа, и модуль обратного преобразования (МОП), входы которого соединены с соответственными выходами четырнадцатого, пятнадцатого и шестнадцатого сумматоров, а его выходы соединены с входами соответственно второго, пятого и девятого сумматоров, при этом МОП выполняет функцию ВТ, где т - знак транспонирования.
В систему введены также блок задания программных движений (БЗПД) и модуль расчета программных движений (МРПД), вход которого подключен к выходу БЗПД, а первый, второй и третий выходы МРПД, соответствующие программных угловым скоростям КА по крену, курсу и тангажу, подключены соответственно ко вторым входам четырнадцатого, пятнадцатого и шестнадцатого сумматоров и одновременно ко вторым входам соответственно одиннадцатого, двенадцатого и тринадцатого сумматоров. Четвертый, пятый и шестой выходы МРПД, соответствующие программным углам поворота КА соответственно по крену, курсу и тангажу, подключены поканально к четвертым, пятым и шестым входам МОП, первого и второго МПП, а так же к третьему, четвертому и пятому входам МКО, а седьмой выход МРПД подключен к третьему входу девятого сумматора и вторым входам первого и второго МКВК.
Ниже приведен пример практической реализации предложения.
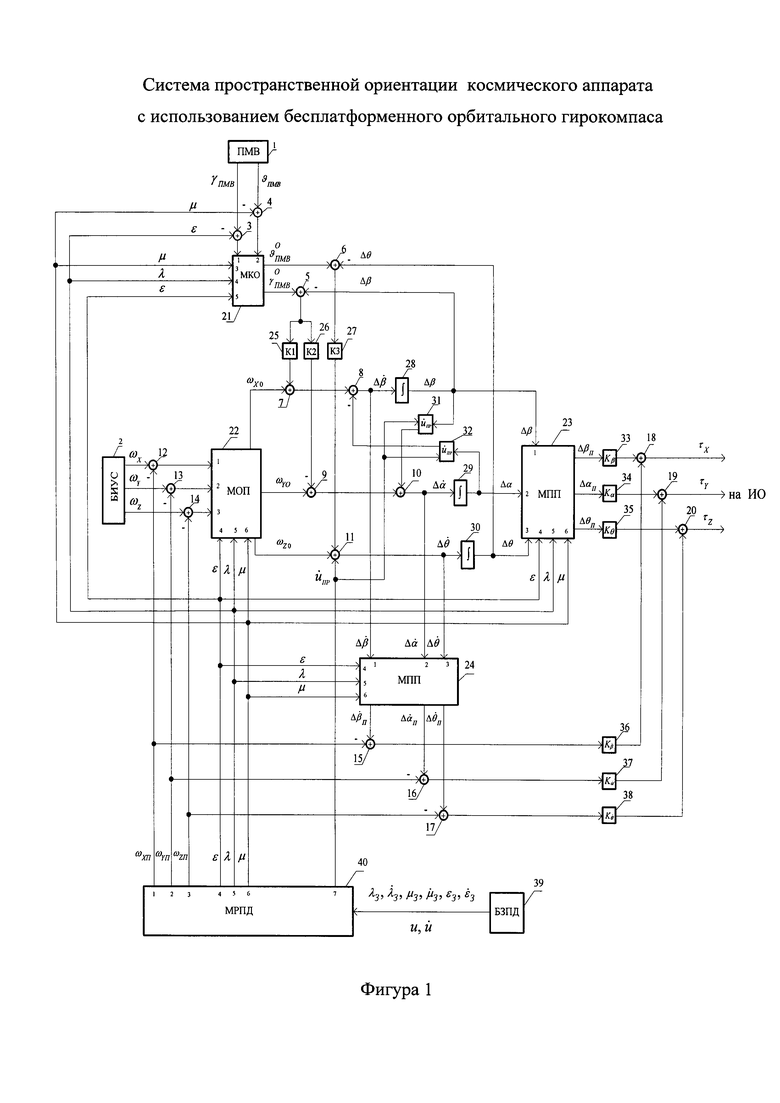
На фиг. 1 показано:
1 - ПМВ;
2 - БИУС;
3-20 - сумматоры;
21 - МКО;
22 - МОП;
23-22 - МПП;
25-27 - МУП;
28-30 - интеграторы;
31-32 - МКВК;
34-35 - МНК-У, МНР-У, МНТ-У;
36-38 - МНК-С, МНР-С, МНТ-С;
39 - БЗПД;
40 - МРПД;
ИО - исполнительные органы;
Δβ, 


ΔβП, ΔαП, ΔθП - выходные сигналы первого МПП 23 в систему стабилизации КА по углам в каналах крена, курса и тангажа;



ωX, ωY, ωZ - угловые скорости КА относительно инерциальной системы координат (ИСК) в проекциях на связанные оси КА по крену, курсу и тангажу, измеряемые гироскопическими датчиками;
ωXo, ωYo, ωZo - угловые скорости «виртуального» КА относительно инерциальной системы координат (ИСК) в проекциях на связанные оси «виртуального» КА по крену, курсу и тангажу, формируемые МОП 22;
ωXП, ωYП, ωZП - значения программных угловых скоростей КА относительно ИСК в проекциях на связанные оси, формируемые МРПД;
γПМВ, ϑПМВ - сигналы ПМВ по крену и тангажу в ПСК;

λ, 




λЗ, 




к1, к2, к3 - коэффициенты коррекции БОГК, реализуемые первым, вторым и третьим МУП соответственно.
На фиг. 2, 3, 4 приведены графики программных поворотов КА по крену (фиг. 2), курсу (фиг. 3) и тангажу (фиг. 4) на равные углы 15°, на которых обозначено:
γ, ψ, ϑ - угловое положение КА относительно ОСК в процессе программных поворотов (нарастание углов) и после их завершения (полочки);
ωX, ωY, ωZ - угловые скорости КА по крену, курсу и тангажу соответственно относительно ИСК в проекции на связанные оси;
ωXO, ωYO, ωZO - угловые скорости «виртуального» КА по крену, курсу и тангажу соответственно относительно ИСК в проекции на связанные оси «виртуального» КА;
На фиг. 5 показаны переходные процессы выполняемых одновременно программных поворотов КА на разные значения углов. Обозначения на фиг. 5 соответствуют обозначениям фиг. 2-4.
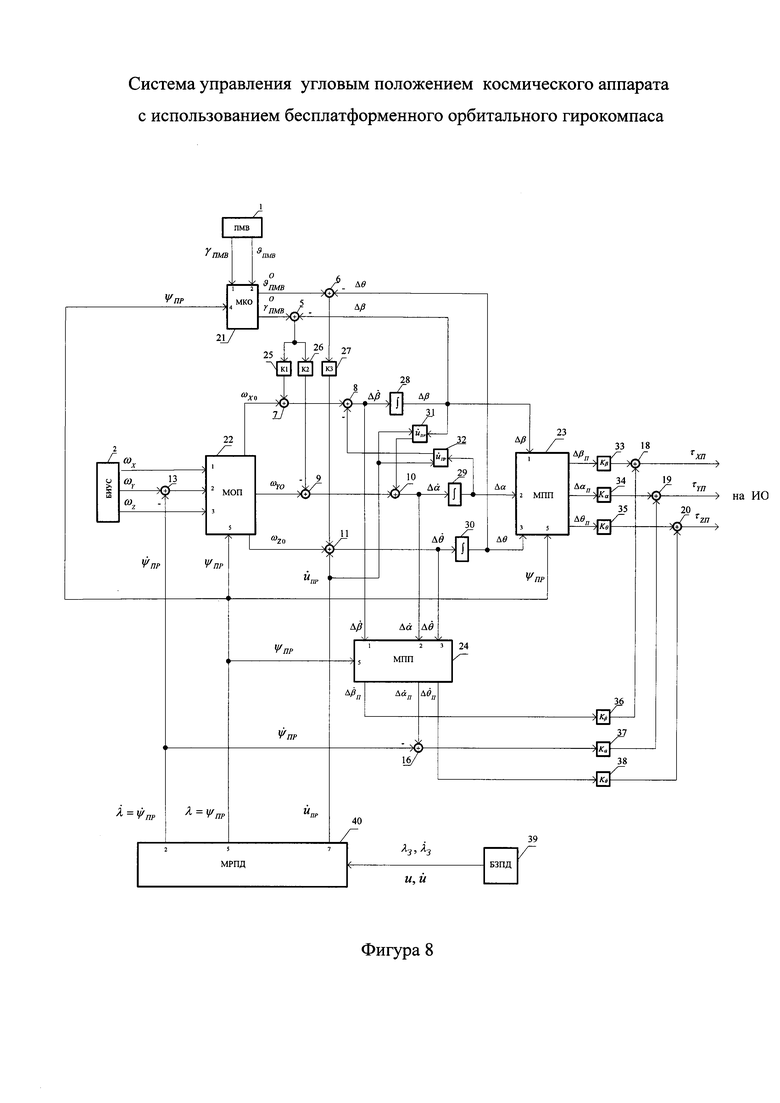
На фиг. 6 показан пример реализации системы управления КА для программного поворота КА по курсу (в примере на 90°) при нулевых значениях программных поворотов по крену и тангажу. На фиг. 6 для наглядности сохранены все обозначения фиг. 1, только программный угол по курсу λ обозначен как ψПР, а программная скорость по курсу

На фиг. 7 показаны графики переходных процессов для программного поворота по курсу при нулевых значениях программных поворотов по крену и тангажу. Обозначения на фиг. 7 соответствуют обозначениям фиг. 2-4.
Идея изобретения заключается в том, что в процессе поворота КА на заданные программные углы λЗ, µЗ, εЗ с заданными программными угловыми скоростями
В соответствии с фиг. 1 уравнения движения системы управления угловым движением КА имеют вид:

уравнения (8) полностью соответствуют уравнениям (2) классического БОГК, где:



где 
Е - единичная матрица




где τХП, τYП, τZП - моменты управления угловым движением КА по связанным осям крена, курса и тангажа соответственно, реализуемые ИО, например двигателями-маховиками.
Программные повороты начинаются с расчета программных движений λ,




Введение программного управления по скорости позволяет добиться почти идеального качества переходного процесса в каждом канале управления (см. фиг. 2-5, 7), но можно обойтись программным управлением только по углу, положив 
В МРПД производится расчет программных углов и программных скоростей:
- время поворотов по осям: 
- текущие значения программных углов:

- текущие значения программных угловых скоростей 
Программный поворот КА осуществляется за счет:
- введения в сигналы ПМВ угловых смещений на величины программных улов ε, µ и пересчета полученных разностей (γПМВ-ε) и (ϑПМВ-µ) из ПСК в ОСК с учетом программного поворота КА по курсу на величину программного угла λ. Это осуществляется в МКО 9, который по окончании переходного процесса точно контролирует положение КА относительно ОСК;
- введения программных угловых скоростей (11) в сигналы стабилизации КА по скорости 

Чтобы сохранить исходную работу БОГК в соответствии с (2) сами параметры стабилизации ΔβП,
В процессе программного поворота в выходных сигналах БИУС появляются программные скорости движения КА - ωXП, ωYП, ωZП. Они компенсируются на сумматорах 12-14, т.к. «мешают» нормальному функционированию БОГК в режиме (2). После этого разностные сигналы, пересчитываются в МОП 22 в малые скорости ωXo, ωYo, ωZo «виртуального» КА относительно ОСК, что полностью удовлетворяет работе БОГК (2) и соотношениям (4).
На фиг. 2-4 показаны результаты моделирования движения КА на равные программные углы и с одинаковой программной угловой скоростью по всем каналам:


В МРПД 40 рассчитаем параметры программных поворотов:
- время поворотов в каждом канале одинаковое: 
- программные углы в течение времени программного поворота:

На графиках сверху вниз показаны углы ориентации КА относительно ОСК, угловые скорости КА относительно ИСК в проекциях на собственные оси и угловые скорости «виртуального» КА относительно ИСК в проекциях на собственные оси. Программный поворот совершается за расчетное время, после этого имеет место небольшое перерегулирование, после завершения переходного процесса ориентация КА точно контролируется МКО 21 в положениях +15° по каждому каналу.
На фиг. 5 продемонстрированно программное движение КА одновременно по курсу на -170°, по крену на +20°, по тангажу на -30° с одинаковой скоростью по каналам 0,05°/с со своими знаками.
Расчет в МРПД 40 дает:
- времена поворотов:

- в течение времени программного поворота необходимо выполнять:
λ=0,05·t для 0≤t≤3400 с,
µ=0,05·t для 0≤t≤600 с,
ε=0,05·t для 0≤t≤400 с
Таким образом, система управления отрабатывает любые задания на совершение пространственных программных поворотов с сохранением устойчивого режима гирокомпасирования.
На фиг. 4 показан важный практический пример реализации системы для случая курсового программного поворота при отсутствии программных поворотов по крену и тангажу ε=µ=0. Для большей наглядности на фиг. 4 введено новое обозначение программного угла курса и программной скорости по курсу: λ=ψПР, 
Система для этого случая существенно упрощается. Ниже приведен вид модулей преобразования и программных скоростей.
Модуль МКО 21 принимает вид:

или
в котором пересчет сигналов ПМВ в ОСК зависит только от программного угла КА по курсу.
Модули прямого преобразования МПП 23, 24 принимают вид:

При этом:
 или
или 
Программная скорость КА имеет место только в канале курса, равна 
Настройки контура стабилизации принимают вид:

Где программная скорость 
Модуль обратного преобразования МОП с функцией ВТ, где т - знак транспонирования, принимает вид:

или

Пример поведение КА в процессе программного поворота по курсу на фиксированный угол +90° при нулевых значениях программных углов по крену и тангажу приведен на фиг. 9.
Как уже отмечалось, динамика системы (отработка меняющихся во времени программных параметров по скорости) зависит только от добротности контура стабилизации.
Точность системы зависит только от погрешностей ПМВ, БИУС и погрешности интегрирования, что непосредственно следует из приведенной выше системы уравнений, и поэтому соответствует точности системы управления с использованием классического БОГК.
Диапазон программных поворотов в режиме гирокомпасирования неограничен по курсу, а по крену и тангажу ограничивается зонами линейности ПМВ, что для современных ПМВ соответствует ~12°÷30°.
При использовании современных ПМВ ошибки ориентации КА относительно ОСК могут находиться в пределах 3÷5 угл. мин и менее, что позволяет данной системе управления конкурировать с более точными системами, например с системами астроориентации.
Таким образом, предложенная система пространственной ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса обеспечивает КА свободу программных поворотов относительно ОСК одновременно по каналам курса, тангажа и крена, сохраняя при этом устойчивую работу БОГК в режиме гирокомпасирования и устойчивое управление программным угловым положением КА в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОКОМПАС ДЛЯ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2015 |
|
RU2597018C2 |
| СПОСОБ КОМПЕНСАЦИИ ОШИБОК ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2015 |
|
RU2597017C2 |
| БЕСПЛАТФОРМЕННЫЙ ОРБИТАЛЬНЫЙ ГИРОКОМПАС С ПРОИЗВОЛЬНОЙ КУРСОВОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2488774C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2579387C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2012 |
|
RU2509690C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПУТЕВОЙ СИСТЕМЕ КООРДИНАТ С ПРИВОДОМ ПОВОРОТА АППАРАТУРЫ НАБЛЮДЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2497728C2 |
| Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса | 2017 |
|
RU2676844C1 |
| Способ восстановления курсовой ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса | 2017 |
|
RU2661050C1 |
| СПОСОБ ОРБИТАЛЬНОГО ГИРОКОМПАСИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2583350C1 |
| ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2579384C1 |







Изобретение относится к области авиационно-космического приборостроения и может быть использовано в системах управления угловым положением космических аппаратов (КА), в которых применяются системы ориентирования с использованием бесплатформенных орбитальных гирокомпасов (БОГК). Технический результат - расширение функциональных возможностей. Для этого в выходные цепи построителя местной вертикали (ПМВ) по крену и тангажу введены сумматоры по одному на каждый канал так, что их входы подключены к соответствующим выходам ПМВ, модуль контроля ориентации (МКО), первый и второй входы МКО по крену и тангажу подключены к выходам соответствующих сумматоров на выходе ПМВ, а выходы МКО по крену и тангажу подключены к входам первого и восьмого сумматоров соответственно, в выходные цепи первого, второго и третьего интеграторов введен первый модуль прямого преобразования (МПП) углов стабилизации КА, первый, второй и третий входы которого подключены к выходам первого, второго и третьего интеграторов соответственно. При этом система управления позволяет совершать КА программные повороты относительно орбитальной системы координат (ОСК) одновременно по каналам курса, тангажа и крена, в то время как БОГК продолжает нормально функционировать, не нарушая режим орбитального гирокомпасирования. 9 ил.
Система управления пространственной ориентацией космического аппарата (КА) с использованием бесплатформенного орбитального гирокомпаса (БОГК), содержащая в канале крена построитель местной вертикали (ПМВ), а также последовательно соединенные первый сумматор, первый модуль усиления и преобразования (МУП), второй сумматор, третий сумматор, первый интегратор, выход которого подключен к второму входу первого сумматора, а также последовательно включенные модуль настройки стабилизации КА по углу в канале крена (МНК-У) и четвертый сумматор, выход которого является входом исполнительных органов (ИО) КА в канале крена, содержащая в канале курса последовательно соединенные тот же первый сумматор, второй МУП, пятый сумматор, шестой сумматор, второй интегратор, а также последовательно включенные модуль настройки стабилизации КА по углу в канале курса-рыскания (МНР-У) и седьмой сумматор, выход которого является входом ИО КА в канале курса, содержащая в канале тангажа ПМВ, а также последовательно соединенные восьмой сумматор, третий МУП, девятый сумматор, третий интегратор, выход которого подключен к второму входу восьмого сумматора, а также последовательно включенные модуль настройки стабилизации КА по углу в канале тангажа (МНТ-У) и десятый сумматор, выход которого является входом ИО КА в канале тангажа, содержащая также модули настройки контура стабилизации КА по угловой скорости МНК-С, МНР-С, МНТ-С по соответствующим каналам крена, курса-рыскания и тангажа, выходы которых подключены ко вторым входам соответственно четвертого, седьмого и десятого сумматоров, содержащая также первый и второй модули компенсации взаимовлияний каналов (МКВК), входы которых подключены к выходам первого и второго интеграторов соответственно, а выходы подключены к вторым входам соответственно шестого и третьего сумматоров, содержащая также блок гироскопических измерителей угловых скоростей (БИУС), отличающаяся тем, что в выходные цепи ПМВ по крену и тангажу введены сумматоры по одному на каждый канал так, что их входы подключены к соответствующим выходам ПМВ, и модуль контроля ориентации (МКО) с функцией преобразования сигналов:


где γПМВ, ϑПМВ - сигналы ПМВ по крену и тангажу в программной системе координат (ПСК);
 ,
,
 - сигналы ПМВ по крену и тангажу, пересчитанные к показаниям ПМВ относительно орбитальной системы координат (ОСК);
- сигналы ПМВ по крену и тангажу, пересчитанные к показаниям ПМВ относительно орбитальной системы координат (ОСК);
λ, µ, ε - углы программных поворотов КА относительно ОСК соответственно по курсу, тангажу и крену,
при этом первый и второй входы МКО по крену и тангажу подключены к выходам соответствующих сумматоров на выходе ПМВ, а выходы МОК по крену и тангажу подключены к входам первого и восьмого сумматоров соответственно, в выходные цепи первого, второго и третьего интеграторов введен первый модуль прямого преобразования (МПП) углов стабилизации КА, первый, второй и третий входы которого подключены к выходам первого, второго и третьего интеграторов соответственно, а выходы подключены к входам соответственно МНК-У, МНР-У и МНТ-У и выполняющий функцию:

второй МПП угловых скоростей стабилизации КА введен в выходные цепи третьего, шестого и девятого сумматоров так, что его первый, второй и третий входы подключены соответственно к выходам третьего, шестого и девятого сумматоров, а его выходы по каналам крена, курса и тангажа подключены к первым входам вновь введенных одиннадцатого, двенадцатого и тринадцатого сумматоров соответственно, выходы которых подключены к входам соответственно МНК-С, МНР-С и МНТ-С, при этом второй МПП повторяет функцию первого МПП, в выходные цепи БИУС введены четырнадцатый, пятнадцатый и шестнадцатый сумматоры, входы которых подключены к выходам БИУС соответственно по каналам крена, курса и тангажа, и модуль обратного преобразования (МОП), входы которого соединены с соответственными выходами четырнадцатого, пятнадцатого и шестнадцатого сумматоров, а его выходы соединены с входами соответственно второго, пятого и девятого сумматоров, при этом МОП выполняет функцию Вт, где т - знак транспонирования, в систему введены также блок задания программных движений (БЗПД) и модуль расчета программных движений (МРПД), вход которого подключен к выходу БЗПД, а первый, второй и третий выходы МРПД, соответствующие программным угловым скоростям КА по крену, курсу и тангажу, подключены соответственно ко вторым входам четырнадцатого, пятнадцатого и шестнадцатого сумматоров и одновременно ко вторым входам соответственно одиннадцатого, двенадцатого и тринадцатого сумматоров, а четвертый, пятый и шестой выходы МРПД, соответствующие программным углам поворота КА соответственно по крену, курсу и тангажу, подключены поканально к четвертым, пятым и шестым входам МОП, четвертым, пятым и шестым входам первого и второго МПП, а также к третьему, четвертому и пятому входам МКО, а четвертый и шестой выходы МРПД подключены ко вторым входам сумматоров на выходе ПМВ соответственно в каналах крена и тангажа, а седьмой выход МРПД подключен к третьему входу девятого сумматора и вторым входам первого и второго МКВК.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2012 |
|
RU2509690C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2378616C1 |
| Устройство для укладки затаренных пакетов в мешки | 1961 |
|
SU141801A1 |
| О.Н.АНУЧИН, И.Э.КОМАРОВА, Л.Ф.ПОРФИРЬЕВ | |||
| Бортовые системы навигации и ориентации искусственных спутников Земли | |||
| - СПб.: ГНЦ РФ ЦНИИ "Электроприбор", 2004, с.238-245 | |||
| Г.КВАЗИУС, Ф.МАККЭНЛЕСС | |||
| Проектирование систем астронавигации | |||
| - М.: Мир, 1970, с.127-133. | |||

