Изобретение относится к области астронавигационных систем [Г.Квазиус, Ф.Маккэнлесс. "Проектирование систем астронавигации". - М.: Мир, 1970, с.127-133], предназначенных для определения стабилизированных угла места и курсового угла на астроориентир, на основании которых определяют поправку курсоуказания и свое местоположение.
Известны системы, например "Оптический измерительный прибор с угломером" по патенту RU №2089852 (БИ №25 10.09.97), в которых плоскость горизонта строится непосредственно в месте расположения визирующего устройства с помощью пузырькового уровня. Недостатком таких секстанов является сложность определения положения горизонта на фоне колебаний пузырька.
Для сглаживания колебаний чувствительного элемента используются гироскопы и интеграторы, например в "Гироскопическом интегрирующем морском секстане" ГИМС-3 или "Интегрирующем авиационном секстане" ИАС-1 [Радкевич Л.П., Беляева М.П. "Ручные навигационные секстаны" "Оптико-механическая промышленность", 1975, №2, с.58-59].
Недостатком всех этих устройств является невозможность определения курсового угла с точностью, необходимой для определения поправки курсоуказания.
Известны принятые за прототип астроинерциальные системы [Г.Квазиус, Ф.Маккэнлесс. "Проектирование систем астронавигации". - М.: Мир, 1970, с.127-133], в которых высота светила измеряется относительно приборной плоскости горизонта, создаваемой инерциальной системой. Основным недостатком прототипа является то, что он помимо оптико-механической части оснащен достаточно сложной и дорогой системой с гироскопами и акселерометрами, создающими большой объем избыточной информации, не обеспечивающей эквивалентного снижения погрешностей.
Задача, которую решает данное изобретение, заключается в минимизации числа чувствительных элементов, обеспечивающих заданную погрешность определения поправки курсоуказания и своего местоположения.
Поставленная задача решается тем, что в непосредственной близости к визирующему устройству устанавливается ортогональная триада акселерометров.
Акселерометры так же, как и установленные на осях карданова подвеса датчики угла, соединены с вычислительным устройством, содержащим блок первичной выработки углов качки, блок прямого преобразования с тремя входами и двумя выходами, Фурье-анализатор с двумя входами, блок обратного преобразования с двумя входами и суммирующее устройство.
Перечисленные элементы соединены между собой, образуя систему вычисления высоты светила и курсового угла на него, выходом которой является первый выход блока прямого преобразования. Акселерометры соединены с первым входом Фурье-анализатора и с блоком первичной выработки углов качки, выход которого соединен с первым входом блока прямого преобразования, второй вход последнего, как и второй вход блока обратного преобразования, соединен с датчиками углов. Замкнутый контур уточнения углов качки образуется за счет последовательного соединения второго выхода блока прямого преобразования с первым входом блока обратного преобразования и выхода последнего - с третьим входом блока прямого преобразования. Блок обратного преобразования с Фурье-анализатором и суммирующим устройством образуют контур поправок путем соединения выхода блока обратного преобразования с вторым входом Фурье-анализатора, выход которого подключен к суммирующему устройству.
Сущность изобретения поясняется чертежом, на котором представлена структурная схема астронавигационной системы. В ее состав входят:
1 - визирующее устройство в кардановом подвесе, содержащее матричный преобразователь ([О.Н.Анучин, И.Э.Комарова, Л.Ф.Порфирьев. «Бортовые системы навигации и ориентации искусственных спутников Земли». - СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2004, с.238-245]), предназначенный для определения положения объекта относительно оси визирования, определяемого углами ΔЕk, Δqk;
2 - акселерометры с горизонтальной осью чувствительности, предназначенные для измерения ускорений Wx, Wy, содержащих информацию об углах е, ρ наклона вилки карданова подвеса относительно горизонта;
3 - акселерометр с вертикальной осью чувствительности (вертикальный акселерометр), предназначенный для измерения ускорения Wz, содержащего информацию об ускорении орбитального движения Woд (орбитальном движении корабля);
4 - датчики нестабилизированных углов места Еk и курсового угла qk, измеренных в наклонной системе координат ([С.С.Ривкин "Стабилизация измерительных устройств на качающемся основании". - М.: Наука, 1978, с.123]), предназначенные для измерения углов поворота карданова подвеса;
5 - блок первичной выработки углов качки, предназначенный для грубого определения углов качки  ;
;
6 - блок прямого преобразования ([С.С.Ривкин "Стабилизация измерительных устройств на качающемся основании". - М.: Наука, 1978, с.56]), предназначенный для вычисления стабилизированных угла места  и курсового угла
и курсового угла  , измеряемых в горизонтной системе координат. В этом блоке производится осреднение мгновенных значений углов Еc и qc для получения их математических ожиданий
, измеряемых в горизонтной системе координат. В этом блоке производится осреднение мгновенных значений углов Еc и qc для получения их математических ожиданий  . Для улучшения сходимости процесса вычислений осуществляется осреднение накопленных в процессе вычислений значений
. Для улучшения сходимости процесса вычислений осуществляется осреднение накопленных в процессе вычислений значений  и получение
и получение  ;
;
7 - Фурье-анализатор, предназначенный для выработки поправок на ускорение орбитального движения
 после анализа спектрального состава и фазовых сдвигов углов качки и орбитального движения
после анализа спектрального состава и фазовых сдвигов углов качки и орбитального движения  ;
;
8 - блок обратного преобразования, предназначенный для выработки углов качки е2 и ρ2 на основе полученных значений  и
и 
 ;
;
9 - суммирующее устройство, предназначенное для добавления поправок, выработанных Фурье-анализатором, в сигнал блока обратного преобразования.
Система работает следующим образом.
В процессе обсервации на астроориентир наводится визирующее устройство 1 (телескоп, антенна и т.д.). Направление на объект определяется с помощью датчиков угла 4 и матричного преобразователя, находящегося в визирующем устройстве 1. Визирующее устройство 1 помещено в двухосный высотно-азимутальный карданов подвес, на осях которого имеются датчики угла высоты Еkн и курсового угла qkн 4. На азимутальной оси карданова подвеса в непосредственной близости к визирующему устройству 1 устанавливаются два акселерометра с горизонтальными осями чувствительности 2 и один акселерометр 3 с вертикальной осью чувствительности. Триада акселерометров поворачивается относительно диаметральной плоскости корабля на курсовой угол qkн. При этом в сигналах акселерометров



где L - отстояние от центра качаний,
Wxн, Wyн - сигналы горизонтальных акселерометров,
Wzн - сигнал вертикального акселерометра,
содержится информация об углах качки в плоскости наклона оси визирования е и в плоскости наклона оси цапф ρ, зашумленная переменными переносными ускорениями и систематической составляющей, зависящей от связи углов качки и ускорения орбитального движения.
Сигналы акселерометров 2, 3 и датчиков угла 4 подаются в вычислитель, состоящий из элементов 5, 6, 7, 8, 9, с целью сглаживания шума и исключения систематических составляющих из сигналов акселерометров 2.
При обсервации происходит накопление массива данных. Вычисления производятся после обсервации. Результаты вычислений относятся к моменту времени, соответствующему середине обсервации.
Поворот карданова подвеса вокруг азимутальной и высотной осей приводит визирующее устройство в положение, при котором его визирная ось направлена на астроориентир с погрешностями ΔЕk и Δqk. Величина этих погрешностей определяется с помощью матричного преобразователя, находящегося в блоке 1. Так как из-за наличия погрешности Δqk оси чувствительности акселерометров 2 не лежат в плоскости визирования объекта, проходящей через направление на светило и азимутальную ось подвеса, необходимо преобразовать показания акселерометров, связав их с этой плоскостью и получив значения ускорений
где [Δqk] - матрица направляющих косинусов, соответствующая повороту на угол Δqk.
В блоке первичной выработки углов качки 5 осуществляется преобразование координат для выполнения вышеуказанного требования, и первичная выработка углов качки е1 - в наклонной плоскости визирования и ρ1 - в вертикальной плоскости, перпендикулярной плоскости визирования.
Вычисленные в блоке 5 углы качки е1, ρ1
 подаются в блок прямого преобразования 6, в котором осуществляется вычисление мгновенных значений высоты светила - стабилизированного Ес и курсового угла на светило - стабилизированного qc
подаются в блок прямого преобразования 6, в котором осуществляется вычисление мгновенных значений высоты светила - стабилизированного Ес и курсового угла на светило - стабилизированного qc


При пеленговании астрономических объектов величины Ес и qc изменяются с частотой вращения Земли, следовательно, за время обсервации можно прибегнуть к линейной интерполяции, предположив, что скорость их изменения постоянна, а средние величины, отнесенные к середине интервала обсервации - константы. Эти константы и вычисляются в этом же блоке 6 прямого преобразования. Вычисляя е2 и ρ2 в блоке обратного преобразования 8 по константам и и переменным сигналам датчиков угла Еk и qk, получим новые значения качки, свободные от помехи, вызванной переносным движением.
Систематическая погрешность определяется в Фурье-анализаторе 7 как среднее значение произведения гармонических составляющих углов качки на ускорение орбитального движения с учетом разности фаз. Разделение углов качки на гармонические составляющие и определение амплитуд и фаз качки и орбитального движения осуществляется в этом же блоке 7. Вычисленные погрешности в виде поправок вводятся через суммирующее устройство в сигнал блока 8.
Вычисления в соответствии с приведенной схемой дают колебательно-сходящийся процесс, поэтому для ускорения схождения реализуется в блоке 6 алгоритм, обеспечивающий осреднение результатов 2-3 итераций.
Технико-экономические преимущества заявленной схемы по сравнению с прототипом заключаются в минимизации количества чувствительных элементов, используемых для решения задач определения поправки курсоуказания и своего местоположения методами пеленгования, при сохранении необходимых точностных характеристик системы. Моделирование показало, что погрешности определения высоты и курсового угла уменьшаются, по сравнению с простым осреднением, на два порядка, в частности при углах качки до 12° погрешности не превышают долей угловых минут.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ ГИРОСКОПИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ МОРСКИХ ОБЪЕКТОВ | 2008 |
|
RU2428659C2 |
| СЕКСТАН | 2008 |
|
RU2372586C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| КОРРЕКТИРУЕМАЯ СИСТЕМА ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И СТАБИЛИЗАЦИИ | 2006 |
|
RU2319930C2 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2610022C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Гирокомпас | 1991 |
|
SU1797690A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
Изобретение относится к области астронавигационных систем, предназначенных для определения стабилизированных угла места и курсового угла на астроориентир, на основании которых определяют поправку курсоуказания и свое местоположение. Техническим результатом изобретения является минимизация числа чувствительных элементов, обеспечивающих заданную погрешность определения поправки курсоуказания и своего местоположения. Система содержит триаду акселерометров, визирующее устройство с датчиками нестабилизированных угла места и курсового угла, блок первичной выработки углов качки, блок прямого преобразования с тремя входами и двумя выходами и блок обратного преобразования с двумя входами, а также Фурье-анализатор с двумя входами и суммирующее устройство. Акселерометры соединены с первым входом Фурье-анализатора и блоком первичной выработки углов качки, выход которого соединен с блоком прямого преобразования. Датчики угла соединены со вторыми входами блоков прямого и обратного преобразований. Соответствующие входы и выходы блоков прямого и обратного преобразований соединены так, что образуется замкнутый контур уточнения углов качки. Выход блока обратного преобразования соединен со вторым входом Фурье-анализатора и через суммирующее устройство - с выходом Фурье-анализатора, образуя контур выработки поправок. Первый выход блока прямого преобразования является выходом всей системы. 1 ил.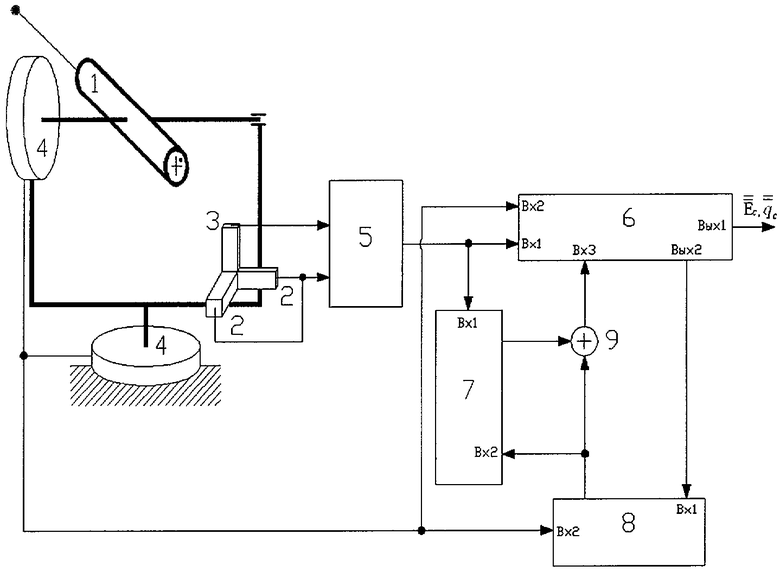
Астронавигационная система, содержащая триаду акселерометров и визирующее устройство с датчиками нестабилизированных угла места и курсового угла, отличающаяся тем, что в систему введен блок первичной выработки углов качки, блок прямого преобразования с тремя входами и двумя выходами, Фурье-анализатор с двумя входами, блок обратного преобразования с двумя входами и суммирующее устройство, причем акселерометры соединены с блоком первичной выработки углов качки, выход которого соединен с первым входом блока прямого преобразования, второй вход которого, как и второй вход блока обратного преобразования, соединен с датчиками углов, Фурье-анализатор установлен с возможностью выработки поправок на ускорение орбитального движения, как среднего значения произведения гармонических составляющих углов качки, определяемых блоком первичной выработки углов качки, второй выход блока прямого преобразования соединен с первым входом блока обратного преобразования, выход которого соединен с третьим входом блока прямого преобразования, образуя замкнутый контур уточнения углов качки, выход блока обратного преобразования соединен также со вторым входом Фурье-анализатора и через суммирующее устройство с выходом Фурье-анализатора, образуя контур выработки поправок, первый выход блока прямого преобразования является выходом всей системы.
| Центробежный электрический выключатель | 1941 |
|
SU73729A1 |
| Оптическая следящая система астрономического телескопа | 1980 |
|
SU964585A2 |
| RU 93014300 A, 27.07.1995 | |||
| СПОСОБ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2132042C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |

