Предлагаемое изобретение относится к области ориентации космических аппаратов (КА), а точнее к способу ориентации КА с использованием орбитального гирокомпаса (ОГК).
Аналогом может служить техническое решение, изложенное в статье авторов А. Брайсона и В. Кортюма «Вычисление местного углового положения орбитального космического аппарата». Труды III Международного симпозиума ИФАК по автоматическому управлению в мирном использовании космического пространства. Управление в космосе т. 2, с. 83-105, Москва, «Наука», 1972 г. Авторы рассматривают способ компенсации ошибок прибора ориентации по Земле (ПОЗ) и дрейфа гироскопов с использованием методов оптимальной фильтрации. Главный недостаток способа - принципиально исключена возможность компенсации влияния детерминированной ошибки ПОЗ в канале тангажа и собственного дрейфа (ГИУС).
Известно также техническое решение, представленное в статье авторов Кэмпбел, Коффи «Цифровые системы отсчета углов». Журнал «Вопросы ракетной техники», 1971 г., №11, стр. 63÷88. В нем рассматривается способ и устройство для управления угловым движением КА с использованием ОГК, в состав которого входит гироскопический измеритель угловой скорости (ГИУС), построитель местной вертикали (ПМВ) и вычислитель. Способ не дает решения задачи компенсации ошибок ПМВ и собственного дрейфа ГИУС.
Наиболее близким аналогом является техническое решение, защищенное патентом РФ №2509690, в котором реализован способ ориентации КА, включающий ориентацию и стабилизацию КА относительно местной вертикали по крену и тангажу с помощью ПМВ и приведение КА по курсу в плоскость орбиты в режиме орбитального гирокомпасирования с использованием показаний ГИУС. Способ не позволяет компенсировать ошибки системы ориентации KA, обусловленные детерминированными ошибками ПМВ по крену и тангажу и собственным дрейфом ГИУС.
Целью изобретения является устранение указанных недостатков, а именно измерение и компенсацию указанных выше ошибок ОГК, используя при этом внутренние ресурсы системы орбитального гирокомпасирования, т.е. ошибки автокомпенсировать.
Для достижения цели, в отличие способа компенсации ошибок ОГК, включающего ориентацию и стабилизацию КА относительно местной вертикали по крену и тангажу с помощью ПМВ и приведение КА по курсу в плоскость орбиты в режиме орбитального гирокомпасирования с использованием показаний ГИУС, установленных по связанным осям КА, выполняют приведенные ниже операции. В установившемся режиме ориентации измеряют и запоминают математическое ожидание сигнала коррекции ОГК в канале курса и крена 



где 
 - математическое ожидание постоянной составляющей собственного дрейфа ГИУС в канале курса;
- математическое ожидание постоянной составляющей собственного дрейфа ГИУС в канале курса;
К2 - коэффициент коррекции ОГК в канале курса;
 - орбитальная угловая скорость движения КА по орбите на моменты измерений.
- орбитальная угловая скорость движения КА по орбите на моменты измерений.
Поворачивают КА по курсу на плюс девяносто градусов относительно ОСК, дожидаются установившегося режима ориентации, измеряют и запоминают математическое ожидание сигнала коррекции ОГК в канале курса и тангажа 



где 
 - математическое ожидание постоянной составляющей собственного дрейфа ГИУС в канале курса.
- математическое ожидание постоянной составляющей собственного дрейфа ГИУС в канале курса.
Полученные значения ошибок вводят в выходные сигналы ПМВ по крену на величину  и тангажу на величину:
и тангажу на величину: 

Ниже приведен пример реализации способа.
Уравнения движения ОГК с возможностью поворота КА на неограниченные углы по курсу относительно ОСК имеют вид (см. патент 2509690):
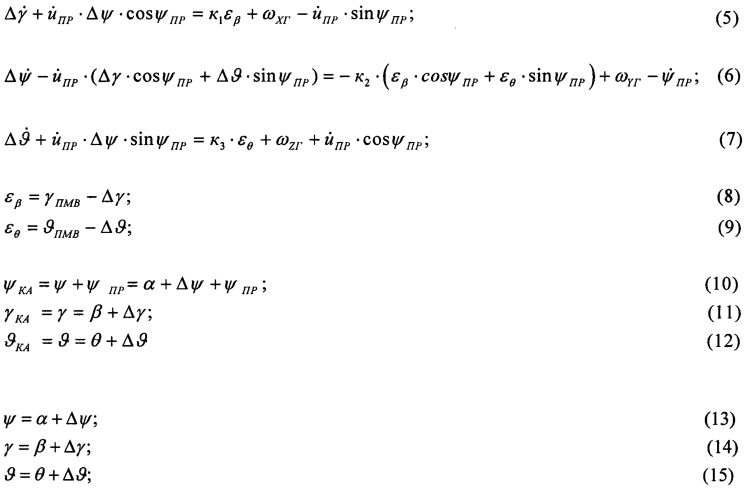
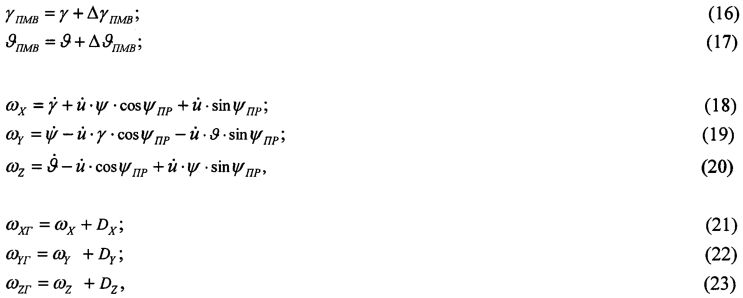
где обозначено
Δγ, 
 , Δϑ,
, Δϑ, 
ΨКА/ОСК - положение связанных осей КА относительно ОСК по курсу;
ΨПР - угол программного поворота КА по курсу относительно ОСК;
α, β, θ - положение (ошибки) приборных осей ОГК относительно ОСК соответственно в каналах курса, крена и тангажа;
Ψ, γ, ϑ - положение (ошибки) ориентации связанных осей КА относительно программной системы координат (ПСК) соответственно по курсу, крену и тангажу;
γПМВ, ϑПМВ - выходные сигналы ПМВ по крену и тангажу соответственно;
ΔγПМВ, ΔϑПМВ - детерминированные ошибки ПМВ в каналах крена и тангажа, включая ошибки установки ПМВ относительно связанных осей КА;
K1, K2, K3 - коэффициенты усиления;
 ,
,  - текущее и программное значения орбитальной угловой скорости движения КА;
- текущее и программное значения орбитальной угловой скорости движения КА;
ωX, ωY, ωZ - угловые скорости КА относительно ОСК в каналах крена, курса и тангажа соответственно;
ωХГ, ωYГ, ωZГ - показания гироскопических датчиков ГИУС по осям крена, курса и тангажа соответственно;
DX, DY, DZ - собственные дрейфы гироскопических датчиков ГИУС в каналах крена, курса и тангажа соответственно.
Решая (5-23) последовательно для ΨΠΡ=0°, 180°, +90°, -90° при  , найдем искомые решения для сигналов коррекции ОГК в искомой форм (1-4). Математические ожидания сигналов получают путем их обработки вычислений, например, методами наименьших квадратов, скользящего окна, полиминальными фильтрами и др.
, найдем искомые решения для сигналов коррекции ОГК в искомой форм (1-4). Математические ожидания сигналов получают путем их обработки вычислений, например, методами наименьших квадратов, скользящего окна, полиминальными фильтрами и др.
Полученные ошибки вводят на выход датчиков ориентации, компенсируя их ошибки:

Для достижения результата по п. 2 формулы изобретения в контур коррекции ОГК вводят интегрально-позиционную коррекцию (изодром - уравнения 5 и 7). В канале танагажа это можно сделать только в положения КА по курсу 0° и 180°, а в канале крена только в положениях ±90°. В противном случае ОГК потеряет устойчивость.
Уравнения движения ОГК для канала тангажа (см. 7):

В установившемся режиме ориентации математические ожидания сигналов интеграторов равны

где  ,
,  - математические значения сигналов интеграторов изодромов в положениях КА по курсу ноль и сто восемьдесят градусов соответственно. Исходя из (6, 7) математическое ожидание собственного дрейфа гироскопического датчика в канале тангажа равно
- математические значения сигналов интеграторов изодромов в положениях КА по курсу ноль и сто восемьдесят градусов соответственно. Исходя из (6, 7) математическое ожидание собственного дрейфа гироскопического датчика в канале тангажа равно

В канале крена при ΨПР=±90° уравнения движения ОГК после введения изодрома примут вид (см. 5):

В установившихся режимах ориентации математические ожидания сигналов интеграторов равны

где  ,
,  - математические ожидания сигналов интеграторов изодромов в положениях КА по курсу +90° и -90° соответственно.
- математические ожидания сигналов интеграторов изодромов в положениях КА по курсу +90° и -90° соответственно.
Исходя из (32, 33) математическое ожидание собственного дрейфа гироскопического датчика в канале крена равно

Ошибки ГИУС компенсируют путем ввода поправок в выходные сигналы датчиков ГИУС крена и тангажа соответственно:

Для более точной оценки собственного дрейфа гироскопических датчиков угловой скорости в каналах крена и тангажа измерения и вычисления математических ожиданий пар сигналов интеграторов 
 и
и  ,
,  выполняют на интервалах времени, кратных периоду орбитального движения КА, т.к. в этом случае минимизируется разность
выполняют на интервалах времени, кратных периоду орбитального движения КА, т.к. в этом случае минимизируется разность  , что существенно улучшает оценки математических ожиданий
, что существенно улучшает оценки математических ожиданий  и
и  .
.
Изобретение относится к области авиационно-космического приборостроения и может найти применение для повышения точности угловой ориентации орбитальных космических аппаратов (КА), в которых применяются системы ориентирования с использованием орбитальных гирокомпасов (ОГК). Технический результат - повышение точности. Для этого обеспечивают автокомпенсацию ошибки ОГК, обусловленные собственными детерминированными ошибками построителя местной вертикали (ПМВ) по крену и тангажу, а также ошибки ОГК, обусловленные постоянными составляющими собственного дрейфа гироскопических датчиков измерителя угловых скоростей в каналах курса, тангажа и крена. Измерение указанных ошибок достигается за счет создания условий их наблюдаемости. 2 з.п. ф-лы.
1. Способ компенсации ошибок орбитального гирокомпаса (ОГК), включающий ориентацию и стабилизацию космического аппарата (КА) относительно местной вертикали по крену и тангажу с помощью построителя местной вертикали (ПМВ) и приведение КА по курсу в плоскость орбиты в режиме орбитального гирокомпасирования с использованием показаний гироскопических измерителей угловой скорости (ГИУС), установленных по связанным осям КА, отличающийся тем, что в установившемся режиме ориентации измеряют и запоминают математическое ожидание сигнала коррекции ОГК в канале курса и крена  сохраняя режим гирокомпасирования поворачивают КА по курсу на угол плюс или минус сто восемьдесят градусов, дожидаются установившегося режима ориентации и вновь измеряют и запоминают математическое ожидание сигнала коррекции в канале курса и крена
сохраняя режим гирокомпасирования поворачивают КА по курсу на угол плюс или минус сто восемьдесят градусов, дожидаются установившегося режима ориентации и вновь измеряют и запоминают математическое ожидание сигнала коррекции в канале курса и крена  по результатам измерений рассчитывают и запоминают математические ожидания ошибок ПМВ в канале крена и собственного дрейфа ГИУС в канале курса в соответствии с формулами:
по результатам измерений рассчитывают и запоминают математические ожидания ошибок ПМВ в канале крена и собственного дрейфа ГИУС в канале курса в соответствии с формулами:


где  - математическое ожидание детерминированной ошибки ПМВ в канале крена, которая включает собственную ошибку ПМВ и ошибку установки ПМВ относительно связанных осей КА;
- математическое ожидание детерминированной ошибки ПМВ в канале крена, которая включает собственную ошибку ПМВ и ошибку установки ПМВ относительно связанных осей КА;
 - математическое ожидание постоянной составляющей собственного дрейфа ГИУС в канале курса;
- математическое ожидание постоянной составляющей собственного дрейфа ГИУС в канале курса;
K2 - коэффициент коррекции ОГК в канале курса и крена;
 - орбитальная угловая скорость движения КА по орбите на моменты измерений,
- орбитальная угловая скорость движения КА по орбите на моменты измерений,
поворачивают КА по курсу на плюс девяносто градусов относительно ОСК, дожидаются установившегося режима ориентации, измеряют и запоминают математическое ожидание сигнала коррекции ОГК в канале курса и тангажа  после чего поворачивают КА по курсу относительно ОСК на минус девяносто градусов, дожидаются установившегося режима ориентации и измеряют и запоминают математическое ожидание сигнала коррекции ОГК в канале курса и тангажа
после чего поворачивают КА по курсу относительно ОСК на минус девяносто градусов, дожидаются установившегося режима ориентации и измеряют и запоминают математическое ожидание сигнала коррекции ОГК в канале курса и тангажа  по результатам измерений рассчитывают и запоминают математические ожидания ошибок ПМВ в канале тангажа и собственного дрейфа ГИУС в канале курса в соответствии с формулами:
по результатам измерений рассчитывают и запоминают математические ожидания ошибок ПМВ в канале тангажа и собственного дрейфа ГИУС в канале курса в соответствии с формулами:


где  - математическое ожидание детерминированной ошибки ПМВ в канале тангажа, которая включает собственную ошибку ПМВ и ошибку установки ПМВ относительно связанных осей КА;
- математическое ожидание детерминированной ошибки ПМВ в канале тангажа, которая включает собственную ошибку ПМВ и ошибку установки ПМВ относительно связанных осей КА;
 - математическое ожидание постоянной составляющей собственного дрейфа ГИУС в канале курса, полученные значения ошибок вводят в выходные сигналы ПМВ по крену на величину
- математическое ожидание постоянной составляющей собственного дрейфа ГИУС в канале курса, полученные значения ошибок вводят в выходные сигналы ПМВ по крену на величину  и тангажу на величину
и тангажу на величину  и в выходной сигнал ГИУС в канале курса на величину
и в выходной сигнал ГИУС в канале курса на величину 
2. Способ по п. 1, отличающийся тем, что для положений КА по курсу ноль и сто восемьдесят градусов относительно ОСК в контур ОГК по тангажу вводят интегрально-позиционную (изодромную) коррекцию сигналов ГИУС от ПМВ, в установившихся режимах ориентации для каждого положения КА измеряют и запоминают математические ожидания сигналов интеграторов изодромов, по которым вычисляют математическое ожидание собственного дрейфа ГИУС в канале тангажа  в соответствии с формулами:
в соответствии с формулами:

где 

где  - математические значения сигналов интеграторов изодромов в положениях КА по курсу ноль и сто восемьдесят градусов соответственно;
- математические значения сигналов интеграторов изодромов в положениях КА по курсу ноль и сто восемьдесят градусов соответственно;
ϑПМВ - выходной сигнал ПМВ по тангажу;
θ - ошибка ОГК построения ОСК по тангажу;
Δθ - выходной сигнал ОГК по тангажу;
 - текущая орбитальная угловая скорость КА;
- текущая орбитальная угловая скорость КА;
 - программная орбитальная угловая скорость КА,
- программная орбитальная угловая скорость КА,
таким же образом для положений КА плюс и минус девяносто градусов в контур ОГК по крену вводят интегрально-позиционную (изодромную) коррекцию сигналов ГИУС от ПМВ, в установившихся режимах ориентации для каждого положения КА измеряют и запоминают математические ожидания сигналов интеграторов изодромов, по которым вычисляют математическое ожидание собственного дрейфа ГИУС в канале крена  в соответствии с формулами:
в соответствии с формулами:

где

где  - математические значения сигналов интеграторов изодромов в положениях КА по курсу плюс и минус девяносто градусов соответственно;
- математические значения сигналов интеграторов изодромов в положениях КА по курсу плюс и минус девяносто градусов соответственно;
γПМВ - выходной сигнал ПМВ по крену;
β - ошибка ОГК построения ОСК по крену;
Δβ - выходной сигнал ОГК по крену;
 - текущая орбитальная угловая скорость КА;
- текущая орбитальная угловая скорость КА;
 - программная орбитальная угловая скорость КА, полученные значения ошибок вводят в выходные сигналы ГИУС в канале крена на величину
- программная орбитальная угловая скорость КА, полученные значения ошибок вводят в выходные сигналы ГИУС в канале крена на величину  и в канале тангажа на величину
и в канале тангажа на величину 
3. Способ по п. 2, отличающий тем, что измерения пар  и
и  проводят с временными периодами кратными целому периоду движения КА по орбите.
проводят с временными периодами кратными целому периоду движения КА по орбите.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2012 |
|
RU2509690C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| Гироскопические системы/Под ред | |||
| Д.С | |||
| ПЕЛЬПОРА | |||
| - М.: Высшая школа, 1986, с.64-65 | |||
| Теория автоматического регулирования / Под ред | |||
| В.В.СОЛОДОВНИКОВА | |||
| - М.; Машиностроение, 1969, кн | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ получения древесного угля | 1921 |
|
SU313A1 |

