ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Последующее описание, в общем, относится к системе визуализации и в особенности касается применения в компьютерной томографии (КТ). Однако следует понимать, что последующее описание пригодно также для других технологий визуализации.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
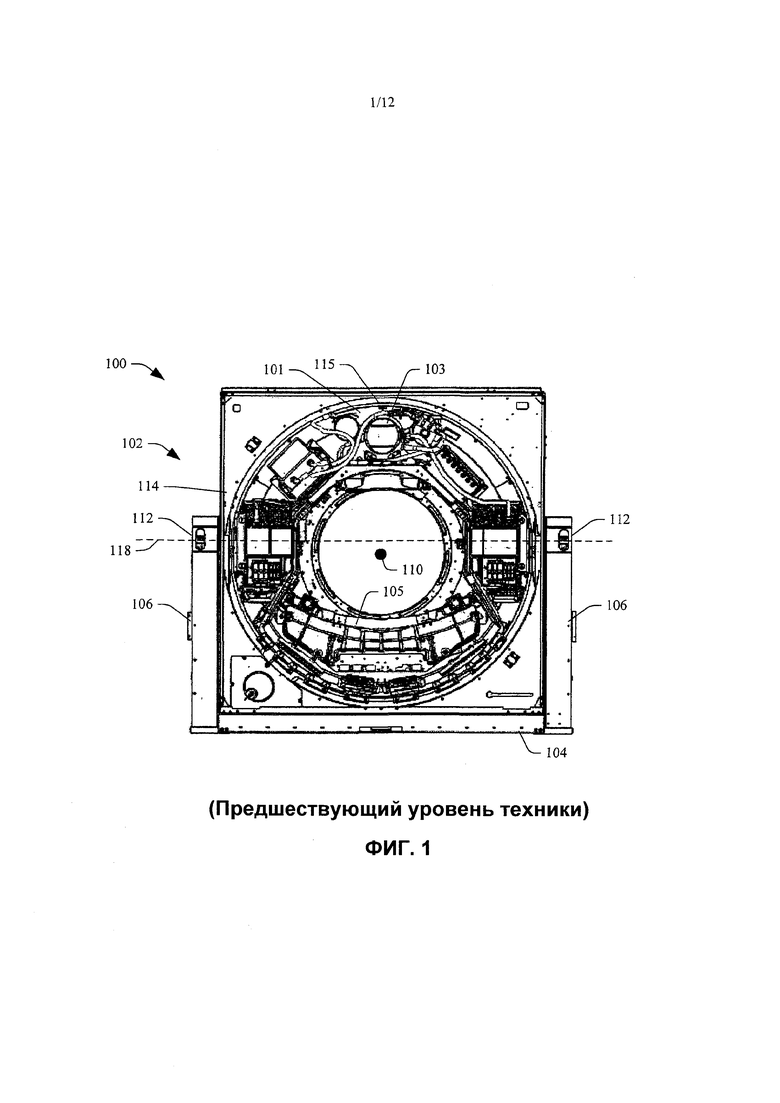
Как показано на фиг.1, традиционный сканер 100, используемый в компьютерной томографии (КТ), обычно включает в себя поворотный гантри 101, поддерживаемый с возможностью вращения на стационарном гантри 102. Поворотный гантри 101 служит опорой, по меньшей мере, одной рентгеновской трубке 103, испускающей излучение, пересекающее исследуемую область и участок объекта или субъекта, помещенный в нее. Опора 120 для субъекта (фиг.4) служит опорой субъекту или объекту в исследуемой области. Показанный поворотный гантри 101 также служит опорой детекторной матрице 105, расположенной противоположно источнику 103 излучения на другой стороне исследуемой области, которая детектирует излучение, пересекающее исследуемую область. Детекторная матрица 105 генерирует сигнал, реконструируемый для получения данных объемного изображения. Сканеры выполнены с поворотным гантри, работающим в вертикальном ненаклонном положении (фиг.1) или наклонном положении.
Как показано на фиг.1-4, в представленном КТ-сканере 100 стационарный гантри 102 включает в себя основание 104 гантри (фиг.1, 2 и 4), установленное (например, посредством четырех (4) - шести (6) или иного количества различных точек по площади основания 104) на полу кабинета для исследований, боковые опоры 106 (фиг.1, 2 и 4), продолжающиеся вертикально вверх от основания 104 гантри до высоты, примерно соответствующей центру 110 исследуемой области (фиг.1), качательную опору 112 (фиг.1 и 4), такую как шариковые или другие подшипники, расположенные в боковых опорах 106 до высоты, примерно соответствующей высоте расположения центра 110 исследуемой области, например, в центре тяжести системы (фиг.1), а также наклонную раму 114 (фиг.1 и 4), включающую в себя опорную раму 115 (фиг.1 и 3), поддерживающую с возможностью вращения поворотный гантри 101.
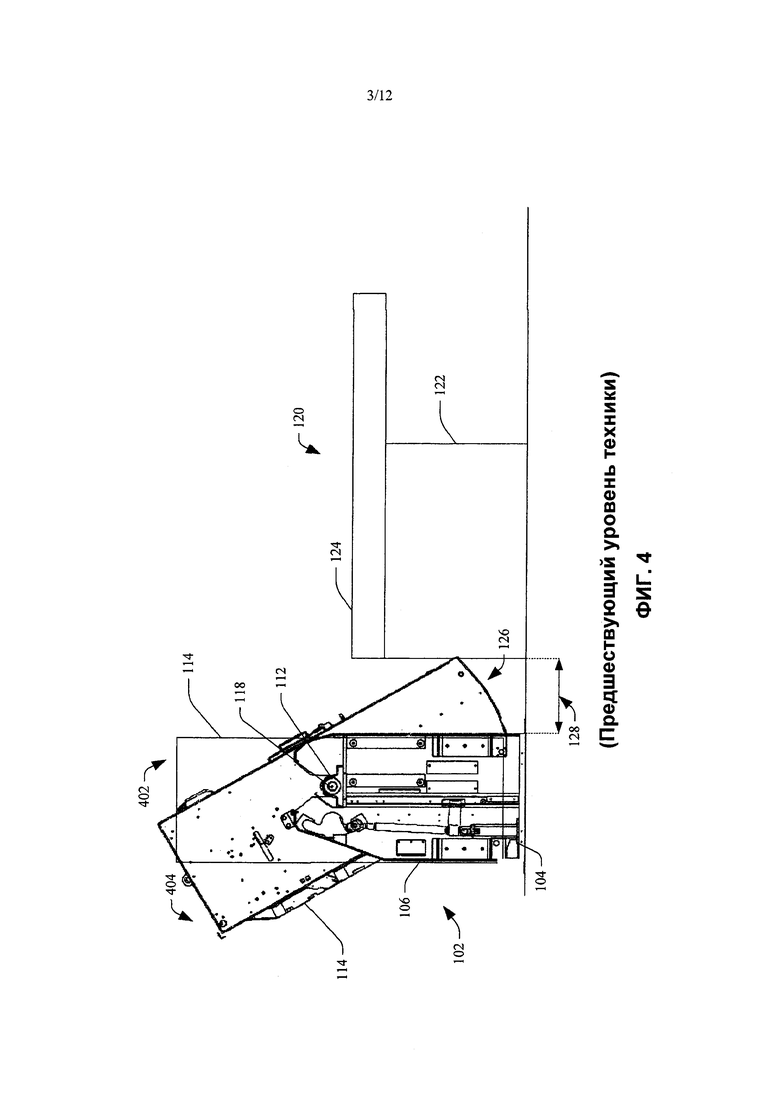
Как показано на фиг.1 и 4, наклонная рама 114 выполнена с возможностью наклона относительно качательной опоры 112 вдоль оси 118 наклона, продолжающейся поперечно от одной боковой опоры 106 до другой боковой опоры 106 примерно на уровне центра 110 или центра тяжести системы (фиг.1) исследуемой области. Наклон наклонной рамы 114, таким образом, приводит к наклону поворотного гантри 101 вокруг оси 118 наклона. Наклонная рама 114 и поворотный гантри 101 могут наклоняться от вертикального (или ненаклонного) положения 402 до заднего (наклонного) положения 404 (как показано на фиг.4) и/или переднего (наклонного) положения (не показано). При наклоне в заднее положение 404 нижний участок 126 (фиг.4) наклонной рамы 114 выступает за пределы основания 104 гантри на расстояние 128, так что опорная база 122 опоры 120 для субъекта должна располагаться, по меньшей мере, на расстоянии 128 от основания 104 гантри, чтобы избежать столкновения с наклонной рамой 114, находящейся под наклоном.
В сканере 100, представленном на фиг.1, основание 104 гантри и боковые опоры 1060 образуют узел, в общем, "U"-образной формы (фиг.1 и 2), имеющий относительно большую ширину 130 в латеральном направлении (фиг.2), при этом боковые опоры 106 проходят вверх за центр 110 исследуемой области (фиг.1) и соединяются с наружной стороной наклонной рамы 114 и опорной рамы 115 (фиг.1). В результате основание 104 гантри (фиг.1, 2 и 4) и опорная рама 115 (фиг.1 и 3), а значит, и система 100 оказываются относительно большими, тяжеловесными и/или дорогостоящими. Конструкция с высокой деформативностью накладывает нежелательно жесткие ограничения на допустимый дисбаланс поворотного гантри, при этом меньшая деформативность может достигаться благодаря повышению жесткости рамы и более жестким допускам между сопряженными поверхностями рамы, что увеличивает стоимость. Если говорить конкретнее, обеспечение поперечной жесткости традиционных наклонных конструкций всегда представляло проблему, при этом, в общем, желательно обеспечить внутренне присущую высокую жесткость по всем осям, за исключением оси наклона. Кроме того, требуется соблюдать жесткие допуски на плоскостность пола по большой площади основания 104 гантри, чтобы ограничить нагрузку или деформацию, испытываемые опорой основания.
Требования к допуску на плоскостность пола можно снизить путем добавления существенных элементов конструкции между местоположениями качательных опор, что может повысить стоимость. Помимо этого, трение в подшипниках качательных опор 112 приводит к износу и изменению крутящего момента. Кроме того, пределы сканирования опоры 120 для субъекта определяются расстоянием, на которое верхняя поверхность 124 стола опоры 120 для субъекта перемещается через исследуемую область. В результате наклона наклонной рамы 114 вокруг оси 118 наклона диапазон сканирования уменьшается на расстояние 128, поскольку опорная база 122, по меньшей мере, должна находиться на расстоянии 128 от основания 104 гантри, как говорилось выше, или длина верхней поверхности 124 стола (включая систему переноса с направляющими, опорными, перемещающими устройствами и т.д.) должна быть увеличена для компенсации потери сканируемого расстояния 128, что может увеличить стоимость опоры 120 для субъекта. Кроме того, основание 104 и верхняя поверхность 124 стола (в том числе несущая конструкция и т.д.) должны обладать достаточной жесткостью, чтобы выдерживать большие консольные нагрузки при сохранении прогиба в пределах заданного допуска.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты настоящей заявки касаются решения вышеупомянутых и других задач.
Согласно одному аспекту система визуализации включает в себя поворотный гантри кольцевой формы, имеющий апертуру и выполненный с возможностью поддержки, по меньшей мере, источника излучения, при этом поворотный гантри совершает вращение вокруг поворотной оси вокруг исследуемой области, причем поворотная ось расположена в апертуре в центральной зоне исследуемой области. Система визуализации дополнительно включает в себя стационарный гантри, способный поддерживать с возможностью вращения поворотный гантри. Стационарный гантри включает в себя основание гантри, наклонную раму кольцевой формы, поддерживающую с возможностью вращения поворотный гантри, а также систему наклона, закрепленную на основании гантри и наклонной раме и расположенную между ними, при этом система наклона определяет ось наклона стационарного гантри, причем ось наклона расположена между основанием гантри и поворотной осью, при этом наклонная рама совершает наклон вокруг оси наклона.
Согласно другому аспекту предложен способ, включающий в себя прием сигнала, указывающего на угол наклона поворотного гантри системы визуализации. Поворотный гантри имеет кольцевую форму и имеет апертуру, при этом совершает вращение вокруг поворотной оси, расположенной в центральной зоне апертуры. Способ дополнительно включает в себя приведение в действие исполнительного механизма наклона системы визуализации для перемещения наклонной рамы системы визуализации в ответ на сигнал. Наклонная рама крепится к качательной опоре, а поворотный гантри установлен с возможностью вращения на наклонной раме. Перемещение наклонной рамы приводит к изгибу качательной опоры вокруг оси наклона качательной опоры, тем самым наклоняя наклонную раму и поворотный гантри вокруг оси наклона, при этом ось наклона расположена ниже поворотной оси.
Согласно другому аспекту стационарный гантри системы визуализации включает в себя основание, наклонную раму и, по меньшей мере, два упругих звена. Эти, по меньшей мере, два упругих звена расположены под углом друг к другу. Каждое из по меньшей мере двух упругих звеньев включает в себя первый конец, прикрепленный к основанию, и второй конец, прикрепленный к наклонной раме. Эти, по меньшей мере, два упругих звена определяют ось наклона наклонной рамы на пересечении этих, по меньшей мере, двух упругих звеньев. Наклонная рама совершает наклон вокруг оси наклона.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение может быть реализовано при использовании различных компонентов и схем расположения компонентов, а также при использовании различных этапов и последовательностей этапов. Чертежи предназначены лишь для иллюстрации предпочтительных вариантов осуществления и не ограничивают объем изобретения.
На фиг.1-4 показан пример качательной опоры предшествующего уровня техники для системы визуализации.
На фиг.5-7 схематично показана качательная опора системы визуализации.
На фиг.8-10 показан пример качательной опоры, представленной на фиг.5-7.
На фиг.11-14 показан другой пример качательной опоры, представленной на фиг.5-7.
На фиг.15 и 16 показан другой пример качательной опоры, представленной на фиг.5-7.
На фиг.17 и 18 показан другой пример качательной опоры, представленной на фиг.5-7.
На фиг.19 показан пример способа.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
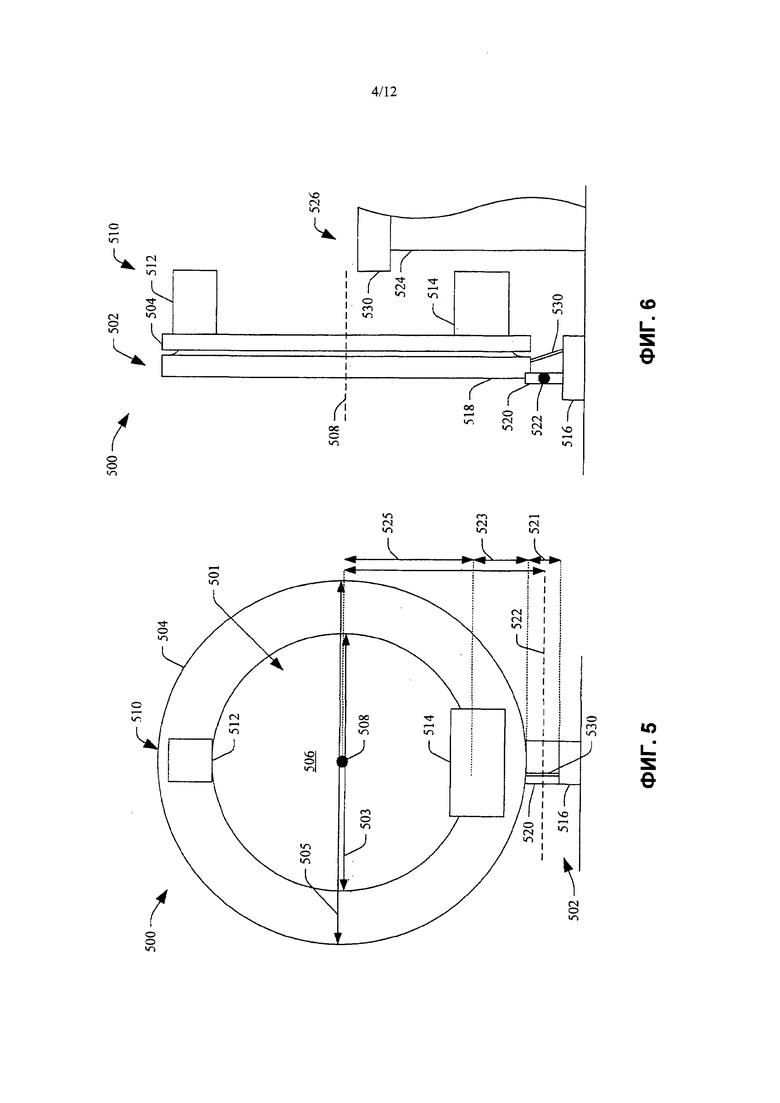
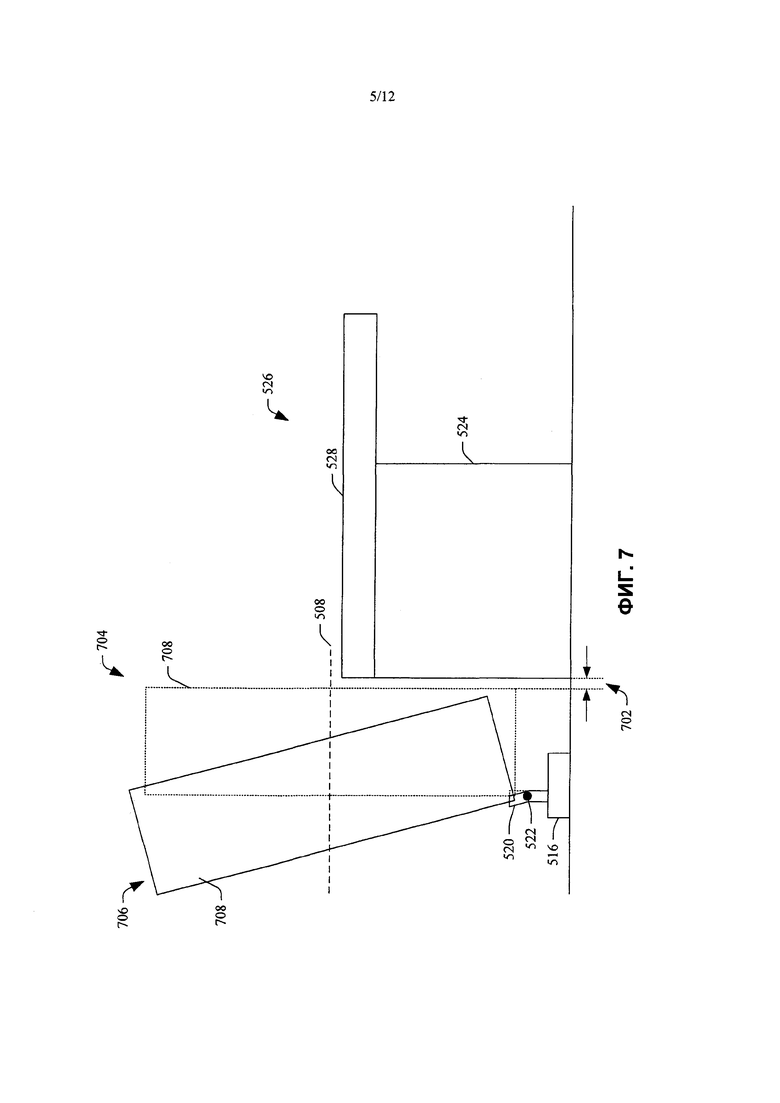
На фиг.5-7 схематично показан участок системы 500 визуализации, такой как сканер, используемый в компьютерной томографии (КТ). На фиг.5 схематично показан вид спереди, на фиг.6 схематично показан вид сбоку, а на фиг.7 показано ненаклонное положение и пример наклонного положения.
Система 500 визуализации включает в себя в целом стационарный гантри 502 и поворотный гантри 504, поддерживаемый с возможностью вращения стационарным гантри 502 посредством подшипника или иной опоры.
Поворотный гантри 504 имеет кольцевую форму (или форму кольца) с внутренним и наружным диаметрами 503 и 505. Апертура 501 поворотного гантри ограничивает протяженность исследуемой области. Поворотный гантри 504 выполнен с возможностью вращения вокруг исследуемой области 506 вокруг поворотной оси 508 (или изоцентра), расположенной приблизительно в центре исследуемой области 506. Участок 504 поворотного гантри выполнен с возможностью поддержки различных компонентов 510 для генерирования, испускания и детектирования излучения, а также генерирования сигналов, отражающих выявленное излучение. В представленном варианте осуществления для простоты показаны только источник 512 излучения и радиационно-чувствительная детекторная матрица 514.
Однако в число других компонентов, опорой которым служит поворотный гантри 504, входят, но не ограничиваясь перечисленным, теплообменник, электрические кабели, конструкционные опорные элементы для поддержки компонентов, противовесы и т.д. В системе четвертого поколения опорой детекторной матрице 514 служит стационарный гантри 502.
В целом стационарный гантри 502 включает в себя основание 516 гантри, выполненное с возможностью установки на полу кабинета для исследований, наклонную раму 518 (фиг.6, на фиг.5 в данном примере не видна), способную поддерживать с возможностью вращения поворотный гантри 504, а также качательную опору 520, закрепленную между основанием 516 гантри и наклонной рамой 518 и соединенную с каждым из них. Наклонная рама 518, также как и поворотный гантри 504, имеет, в общем, кольцевую форму (или форму кольца) и имеет апертуру, превышающую апертуру 501 поворотного гантри 504, со своими внутренним и наружным диаметрами. Качательная опора 520 определяет ось 522 наклона, вокруг которой совершает наклон наклонная рама 518, а значит, и поворотный гантри 504. Как показано, ось 522 наклона расположена ниже поворотной оси 508, а именно между основанием 514 гантри и поворотной осью 508.
Хотя ось 522 наклона показана на высоте 521 между основанием 516 гантри и поворотным гантри 504 в данном варианте осуществления, при других конфигурациях она может находиться в диапазоне высот 523, где она пересекает участок 504 поворотного гантри, но располагается ниже апертуры 501, в диапазоне высот 525, где она пересекает апертуру 501, но располагается ниже поворотной оси 508, либо на высоте, равной высоте поворотной оси 508 или превышающей ее. Кроме того, представленная ось 522 наклона показана ниже наклонной рамы 518. При других конфигурациях ось 522 наклона может располагаться иначе, например, позади наклонной рамы 518 (на стороне наклонной рамы 518, обращенной от опоры 526 для субъекта), впереди наклонной рамы 518 (на стороне наклонной рамы 518, обращенной к опоре 526 для субъекта), частично ниже и с одной из сторон, частично ниже и с обеих сторонах, а также не ниже и с обеих сторонах.
Когда ось 522 наклона расположена ниже поворотной оси 508, размер в целом стационарного гантри 502 может быть меньше, чем при конфигурации, в которой ось наклона находится на высоте поворотной оси 508 или выше (например, как показано на фиг.1). Например, на фиг.5-7 качательная опора 520 не продолжается до высоты поворотной оси 508, как в случае конфигурации, показанной на фиг.1, при этом основание 516 гантри и качательная опора 520 меньше по размеру и весу, чем в конструкции, представленной на фиг.1-4. Помимо этого, когда данная ось 522 наклона расположена ниже наклонной рамы 518, качательная опора может быть меньше качательной опоры 115, показанной на фиг.3. Обычно уменьшение размера и/или веса основания 516 и качательной опоры может достигать 75% по сравнению с конфигурацией, показанной на фиг.1-4, например, 20%, 30%, 45%, 50%, или иного количества процентов вплоть до 75% или выше, что не только уменьшает занимаемую площадь и вес системы 500, но также может снизить общую стоимость системы 500.
Кроме того, когда ось 522 наклона расположена ниже, опорная база 524 опоры 526 для субъекта, служащей опорой объекту или субъекту в исследуемой области 506 до, в процессе и/или после сканирования, может располагаться ближе к поворотному гантри 504, не приводя к столкновению между находящимся под наклоном поворотным гантри 504 и опорной базой 524, по сравнению с конфигурацией, представленной на фиг.1-4, находясь, как показано на фиг.7, на расстоянии 702, пригодном как для ненаклонного положения 704, так и для наклонного положения 706 наклонной рамы 518 и поворотного гантри 504 (в данном примере для простоты совместно показаны под позицией 708). Таким образом, при заданной продольной длине верхней поверхности 528 стола возможный диапазон сканирования в ненаклонном положении становится больше по сравнению с конфигурацией, показанной на фиг.4. Таким образом, диапазон сканирования для системы 500 можно расширить, путем уменьшения длины верхней поверхности 528 стола для заданных пределов сканирования можно снизить стоимость либо можно достичь сочетания расширения диапазона сканирования и снижения стоимости верхней поверхности стола 528 и/или повышения рабочих характеристик.
Как показано на фиг.5-7, исполнительный механизм 530 наклона (фиг.5 и 6) выполнен с возможностью перемещения наклонной рамы 518 между наклонным положением 706 (фиг.7) и ненаклонным положением 704 (фиг.7). В число примеров пригодных исполнительных механизмов входят шток с линейным перемещением от шарикового ходового винта, гидравлический шток и/или другой исполнительный механизм наклона. Для содействия исполнительному механизму 530 могут использоваться одна или более пружин. В показанном варианте осуществления представлен только один исполнительный механизм 530 наклона. Однако можно использовать более одного такого же или иного исполнительного механизма 530 наклона. Помимо этого, местоположение показанного исполнительного механизма 530 наклона не является ограничивающим, при этом исполнительный механизм 530 наклона может располагаться впереди качательной опоры 520 (как показано), позади качательной опоры 520, сбоку качательной опоры 520 и/или в ином месте. Наряду с исполнительным механизмом 530 наклона в качестве опции может использоваться тормоз.
В одном примере исполнительный механизм 530 наклона используется для наклона наклонной рамы 518, которая в норме является ненаклонной, в наклонное положение (например, от нуля (0) градусов до тридцати (30) градусов). В другом примере исполнительный механизм 530 наклона используется для перемещения наклонной рамы 518, которая в норме занимает наклонное положение, в ненаклонное положение (например, от 30 градусов до 0 градусов). В еще одном примере исполнительный механизм 530 наклона используется для перемещения наклонной рамы 518, которая в норме занимает наклонное положение, между дополнительным наклонным и ненаклонным положениями (например, от пятнадцати (15) градусов до 30 градусов или 0 градусов, от 0 градусов до отрицательных тридцати (-30) градусов или положительных тридцати (+30) градусов, и т.д.). В предшествующем описании 0 градусов соответствует вертикальному положению, такому как положение, обозначенное ссылочной позицией 704 (фиг.7), а 30 градусов соответствует либо наклону назад (фиг.7), либо наклону вперед (не показано). Однако следует понимать, что эти углы наклона являются относительными углами, при этом конкретные значения величины угла, составляющие 0, 15 и 30 градусов, приведены в целях пояснения и не являются ограничивающими. Кроме того, вышеприведенные границы наклона в 30 и 60 градусов также приведены в пояснительных целях и не являются ограничивающими.
Контроллер исполнительного механизма наклона (не виден) выполнен с возможностью приведения в действие исполнительного механизма 530 наклона. Например, в ответ на получение консолью системы 500 визуализации входного сигнала, указывающего на то, что протокол сканирования включает в себя ненулевой (относительно вертикали) угол наклона поворотного гантри 504, консоль посылает команду контроллеру, после чего контроллер приводит в действие исполнительный механизм 530 наклона для наклона наклонной рамы 518 на основе значения угла наклона. По завершении сканирования консоль может послать команду контроллеру, после чего контроллер приводит в действие исполнительный механизм 530 наклона для возврата наклонной рамы 518 в вертикальное положение или перемещения наклонной рамы 518 на другой угол наклона. Входной сигнал может выдаваться в ответ на выбор пользователем протокола с помощью манипулятора типа «мышь», клавиатуры или другого устройства ввода, и/или путем выбора или указания пользователем конкретного угла наклона, и/или иным способом. В еще одном варианте осуществления органы управления, расположенные на стационарном гантри или в ином месте, позволяют пользователю вручную наклонить наклонную раму 518. Пользователь может являться уполномоченным техническим специалистом по проведению визуализации или врачом, членом обслуживающего персонала, производственного персонала и/или иным уполномоченным лицом либо роботом.
В число других компонентов, обычно применяемых с системой 500, но не показанных для краткости и ясности, входят средство реконструкции, реконструирующее сигналы, генерируемые детекторной матрицей 512, для создания данных объемного изображения, а также операторская консоль (например, компьютер общего или специального назначения) с резидентным программным обеспечением, позволяющим оператору управлять работой системы 100, например, для выбора протоколов, предполагающих наклон или отсутствие наклона, наклона вручную наклонной рамы 518, инициации сканирования и т.д.
Следует понимать, что геометрические формы и/или взаимное положение одного или более компонентов 500, 502, 504, 512, 514, 516, 518 и 520 представлены в пояснительных целях и не являются ограничивающими. Таким образом, в других вариантах осуществления один или более таких компонентов могут иметь иную геометрию и/или иное местоположение.
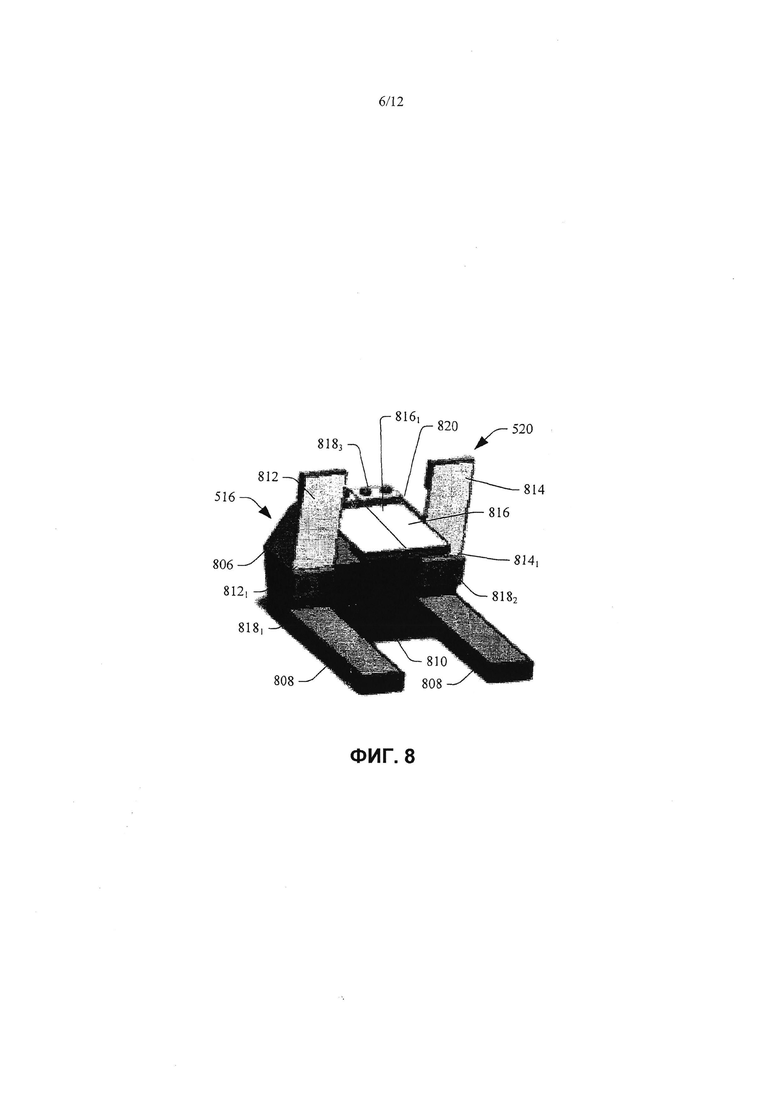
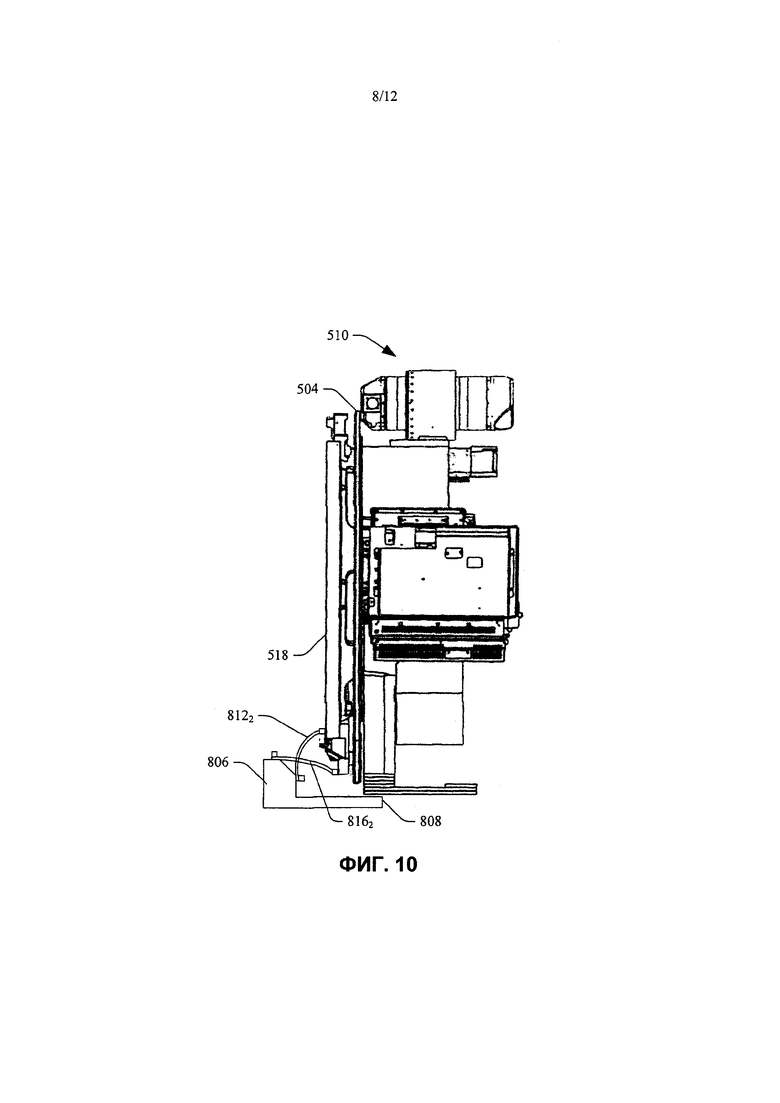
На фиг.8-10 показан пример качательной опоры, представленной на фиг.5-7. На фиг.8 показан неограничивающий вариант осуществления качательной опоры 520 в сочетании с основанием 516 гантри, на фиг.9 показан неограничивающий пример качательной опоры 520, представленной на фиг. 8, в сочетании с основанием 516 гантри, наклонной рамой 518, участком 504 поворотного гантри, а также некоторыми из компонентов 510, закрепленными на участке 504 поворотного гантри, где нормальное состояние наклонной рамы 518 представляет собой наклонное состояние, а на фиг.10 показано содержимое фиг.9, где исполнительный механизм 530 был использован для перемещения наклонной рамы 518 в вертикальное ненаклонное положение. Следует отметить, что исполнительный механизм 530 наклона на этих фигурах не показан.
Сначала обратимся к фиг.8, на которой в данном варианте осуществления основание 516 включает в себя корпус 806, а также, по меньшей мере, одну ножку 808 (в представленном варианте осуществления показаны две ножки 808). Ножки 808 выступают по существу горизонтально и в одном направлении от одной стороны 810 корпуса 806. Обычно, будучи установленной в системе 500, сторона 810 корпуса 806 обращена к опоре 526 для субъекта (фиг.6 и 7). Качательная опора 520 включает в себя, по меньшей мере, одно упругое звено, такое как листовая пружина, спиральная пружина и/или другое упругое звено. В пояснительных целях последующее описание подразумевает листовую пружину. Однако следует понимать, что в настоящем описании возможны и другие упругие звенья.
Как показано, качательная опора 520 включает в себя первую листовую пружину 812, вторую листовую пружину 814 и третью листовую пружину 816. Первые концевые области 8121 и 8141 первой и второй листовых пружин 812 и 814 крепятся посредством креплений 8181 и 8182 к стороне 810 корпуса 806, разделенные зазором, и симметрично продолжаются вертикально вверх относительно ножек 808. В других вариантах осуществления листовые пружины 812 и 814 симметрично не продолжаются. Кроме того, показанные листовые пружины 812 и 814 имеют одинаковую длину, однако листовые пружины 812 и 814 могут быть разной длины. Первая концевая область 8161 третьей листовой пружины 816 крепится посредством крепления 8183 к верхней части 820 корпуса 806 и продолжается параллельно ножкам 808 в области зазора между первой и второй листовыми пружинами 812 и 814. Листовая пружина 816 может иметь ту же или иную длину, что и, по меньшей мере, одна из листовых пружин 812 и 814.
Как показано на фиг.9, будучи установленными вместе с наклонной рамой 518, вторые концевые области 8122 и 8142 (не видны) первой и второй листовых пружин 812 и 814 (не видны) крепятся посредством креплений 8184 и 8185 (не видны) к задней стороне 902 наклонной рамы 518, обращенной от участка 504 поворотного гантри. Помимо этого, вторая концевая область 8162 третьей листовой пружины 816 крепится посредством крепления 8186 также к задней стороне 902 наклонной рамы 518. На фиг.9 также показан двигатель 904, который поворачивает участок 504 поворотного гантри посредством ремня, цепи, зубчатой передачи и т.п.
В варианте осуществления, показанном на фиг.9, наклонная рама 518 установлена на качательной опоре 516 так, что (вертикальные) листовые пружины 812 и 814 и (горизонтальная) листовая пружина 816 перпендикулярны друг другу и находятся в неизогнутом состоянии, при этом ось 522 наклона расположена на пересечении 908 пружин 812 и 814 с пружиной 816. В показанном варианте осуществления точка пересечения расположена на половине длины листовых пружин 812 и 814 и на половине длины листовой пружины 816. Ось 522 наклона расположена на пересечении 908, которое в данном варианте осуществления расположено позади наклонной рамы 518 (на стороне наклонной рамы 518, противоположной стороне, обращенной к опоре 526 для субъекта). В других вариантах осуществления пересечение 908 и/или ось 522 наклона расположены иначе, как показано в настоящем описании.
Показанная наклонная рама 518 наклонена на некоторый угол относительно вертикали. Пригодные углы включают углы от нуля (соответствует вертикали) до сорока пяти (45) градусов, например тридцать (30) градусов, пятнадцать (15) градусов или другие углы. Угол между полным наклоном и нулевым наклоном (например, 15 градусов при наклоне от 0 до 30 градусов) может снизить требования к мощности двигателя наклона. В показанном варианте осуществления рама 518 наклонена так, что центр тяжести 906 комбинации участка 504 поворотного гантри и компонентов 510 расположен над пересечением 908 листовых пружин 812 и 814 с листовой пружиной 816. Однако в других вариантах осуществления центр тяжести 906 может находиться спереди или сзади оси 522 наклона. В одном примере смещение центра тяжести 906 добавляет предварительную нагрузку на исполнительный механизм, что может оказаться полезным, когда система привода обладает «зоной нечувствительности» (т.е. областью с очень низкой жесткостью при переходе от сжатия к растяжению). Предварительная нагрузка может использоваться для компенсации дисбаланса нагрузок на ротор.
В данном варианте осуществления при наклоне вперед (как показано на фиг.10) или дополнительно назад (не показано) листовые пружины 812, 814 и 816 изгибаются и естественным образом противодействуют моментной изгибающей нагрузке. Такая схема позволяет уменьшить длину рабочего хода и уменьшить нагрузку на исполнительный механизм наклона по сравнению с конфигурацией, при которой листовые пружины 812-816 отсутствуют (например, фиг.1-4), что также может позволить снизить общую стоимость. Помимо этого, можно повысить надежность оборудования путем уменьшения нагрузок на отдельные компоненты. В частности, один из компонентов может выйти из строя, при этом оборудование по-прежнему остается полностью функциональным. В другом не ограничивающем примере маломощный исполнительный механизм уменьшает вероятность причинения вреда сканируемому объекту.
Используя две вертикальные листовые пружины 812 и 814, разнесенные между собой, можно повысить жесткость, а также можно уменьшить кручение относительно листовых пружин по сравнению с конфигурацией, при которой используется единственная вертикальная листовая пружина. В других вариантах осуществления могут использоваться более двух вертикальных и/или горизонтальных листовых пружин и/или менее двух вертикальных и/или горизонтальных листовых пружин.
Возможны следующие варианты.
На фиг.9 листовые пружины 812, 814, 816 находятся в неизогнутом состоянии, когда наклонная рама 518 наклонена. В одном варианте, по меньшей мере, одна из двух листовых пружин 812 и 814 или листовая пружина 816 в качестве альтернативы может быть выполнена так, чтобы пребывать в изогнутом состоянии, когда наклонная рама 518 наклонена.
На фиг.10 листовые пружины 812, 814, 816 пребывают в изогнутом состоянии, когда наклонная рама 518 находится в ненаклонном вертикальном положении. В одном варианте, по меньшей мере, одна из двух листовых пружин 812 и 814 или листовая пружина 816 в качестве альтернативы может быть выполнена так, чтобы пребывать в неизогнутом состоянии, когда наклонная рама 518 находится в ненаклонном вертикальном положении.
В другом варианте две вертикальные листовые пружины 812 и 814 в качестве альтернативы могут быть выполнены в виде горизонтальных листовых пружин, а одна горизонтальная листовая пружина 816 в качестве альтернативы может быть выполнена в виде одной или более вертикальных листовых пружин.
В другом варианте используется единственная вертикальная листовая пружина (листовая пружина 812 или 814), а другая листовая пружина отсутствует. Исключение одной из листовых пружин 812 или 814 дополнительно снижает общий размер и/или общую стоимость системы 516 наклона. Однако использование обеих вертикальных листовых пружин 812 и 814 может снизить скручивание вокруг продольных осей листовых пружин 812 и 814 по сравнению с конфигурацией с единственной вертикальной листовой пружиной.
В другом варианте качательная опора 516 включает в себя более двух вертикальных листовых пружин 812 и 814 и/или более одной горизонтальной листовой пружины 816.
В другом варианте, по меньшей мере, две из двух вертикальных листовых пружин 812 или 814 и/или горизонтальной листовой пружины 816 выполнены в виде одной листовой пружины.
В общем, конфигурация качательной опоры 216, показанной на фиг.8-10, приводит к оптимально малому размеру рамы.
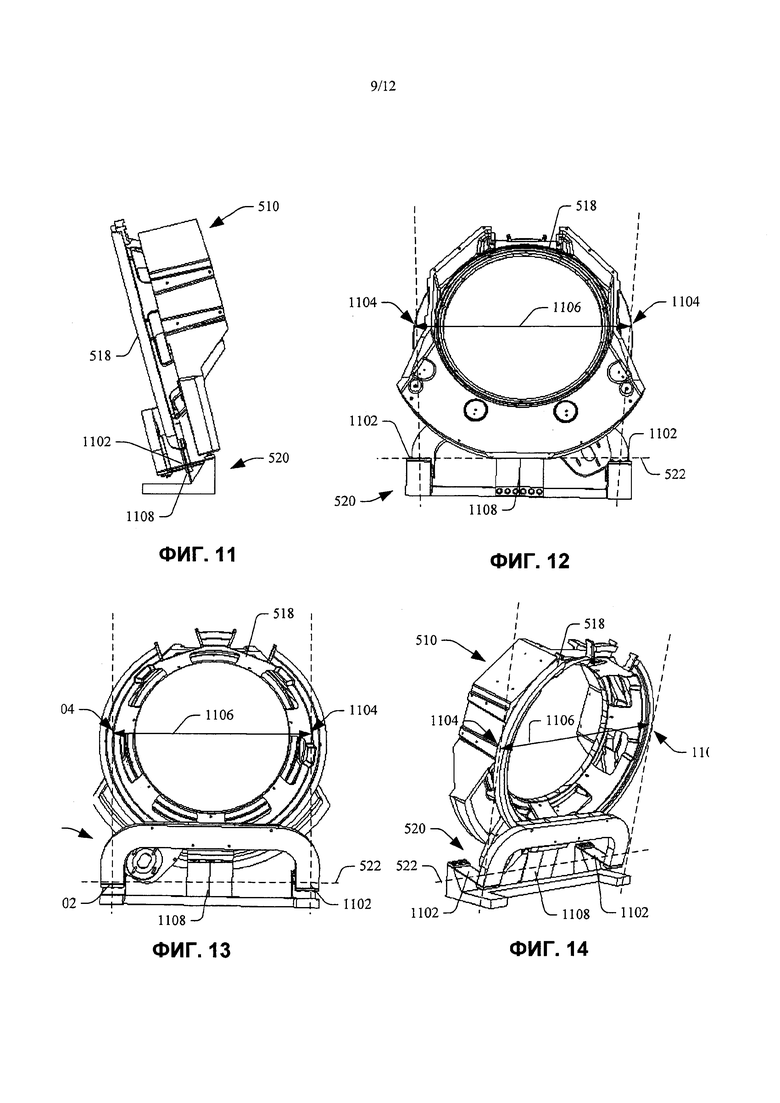
На фиг.11-14 показан неограничивающий пример конфигурации качательной опоры 520. Как показано на этих фигурах, наружные листовые пружины 1102 разнесены на большее расстояние, чем наружные листовые пружины 812 и 814 на фиг.8-10. В частности, листовые пружины 1102 соответственно расположены приблизительно под наружными кромками 1104 по внешнему диаметру 1106 наклонной рамы 518. В результате качательная опора 520, представленная на фиг.11-14, является более жесткой и менее поддается скручиванию по сравнению с конфигурацией, показанной на фиг.8-10. При такой конфигурации ось 522 наклона расположена позади наклонной рамы 518 (на стороне наклонной рамы 518, противоположной стороне, обращенной к опоре 526 для субъекта) и ниже наклонной рамы 518, поворотного гантри 504 и расположенных на нем компонентов 510. Кроме того, наружные листовые пружины 1102 представляют собой расположенные под углом горизонтальные листовые пружины, а внутренние листовые пружины 1108 представляют собой расположенные под углом вертикальные листовые пружины. Будучи оптимизированными по напряжениям, листовые пружины не отклоняются в середине диапазона углов наклона.
На фиг.15 и 16 показан другой неограничивающий вариант качательной опоры 520. При такой конфигурации наружная листовая пружина 1502 и внутренняя листовая пружина 1504 расположены слева от одной стороны 1506 участка 504 поворотного гантри и крепятся к первой боковой области 1508 наклонной рамы 518, выступающей влево за пределы внешнего диаметра участка 504 поворотного гантри. Аналогичным образом наружная листовая пружина 1510 и внутренняя листовая пружина 1512 расположены справа от второй противоположной стороны 1514 поворотного гантри 504, противоположной первой стороне 1506 через исследуемую область, и крепятся ко второй боковой области 1516 наклонной рамы 518, выступающей вправо за пределы внешнего диаметра участка 504 поворотного гантри.
Корпус 806 основания 516 включает в себя первую и вторую половины 8061 и 8061 корпуса, каждая из которых имеет одну из ножек 808, обращенную в направлении от опоры 526 для субъекта (фиг.6 и 7). Наружная листовая пружина 1502 установлена горизонтально между первой половиной 8061 корпуса и наклонной рамой 518, а внутренняя листовая пружина 1504 установлена вертикально между первой половиной 8061 корпуса и наклонной рамой 518. Наоборот, наружная листовая пружина 1510 установлена вертикально между второй половиной 8062 корпуса и наклонной рамой 518, а внутренняя листовая пружина 1512 установлена горизонтально между второй половиной 8062 корпуса и наклонной рамой 518.
В данном варианте осуществления исполнительный механизм 530 наклона расположен в соединении с одной из ножек 808. Кроме того, ось 522 наклона расположена впереди наклонной рамы 518 (между наклонной рамой 518 и опорой 526 для субъекта) ниже поворотной оси 508 и проходит поперек примерно на уровне периметра 1518 апертуры 501 поворотного гантри 504. В другом примере ось наклона находится ниже или выше периметра 1518 апертуры 501.
На фиг.17 и 18 показан другой неограничивающий вариант качательной опоры 220. При такой конфигурации все листовые пружины 1702, 1704 и 1706 расположены на одной стороне поворотного гантри 504 и крепятся к боковой области 1708 наклонной рамы 518, выступающей за пределы внешнего диаметра поворотного гантри 504. Основание 516 включает в себя корпус 806, который в данном примере имеет единственную ножку 808, обращенную в направлении, перпендикулярном опоре 526 для субъекта (фиг.6 и 7), вдоль поперечной оси системы 500.
Листовые пружины 1702 и 1704 установлены вертикально между корпусом 806 и боковой областью 1708 и разнесены, имея между собой зазор. Листовая пружина 1706 установлена горизонтально между корпусом 806 и боковой областью 1708 перпендикулярно листовым пружинам 1702 и 1704, находясь между ними. Ось 522 наклона расположена впереди наклонной рамы 518 (между наклонной рамой 518 и опорой 526 для субъекта) ниже поворотной оси 508 и проходит поперек непосредственно над периметром 1518 апертуры 501 поворотного гантри 504. В другом примере ось наклона проходит по периметру 1518 апертуры 501 или ниже него.
В другом варианте, по меньшей мере, одна из листовых пружин, представленных в настоящем описании, включает в себя одну или более дополнительных листовых пружин, смежно установленных одна над другой. При такой конфигурации дополнительные листовые пружины жестко крепятся одним концом и включают в себя свободноплавающий конец, который может свободно поступательно перемещаться относительно зафиксированного конца при изгибе одной или более из листовых пружин.
В другом варианте основание 516 гантри представляет собой часть опорной базы 524 для субъекта.
Система 520 наклона может также применяться для использования системы 500 в качестве сервисного инструмента, например для подъема и/или установки компонентов, поскольку естественное движение наклона перемещает ротор в положение, близкое к вертикальному, в положении ротора «на шести часах».
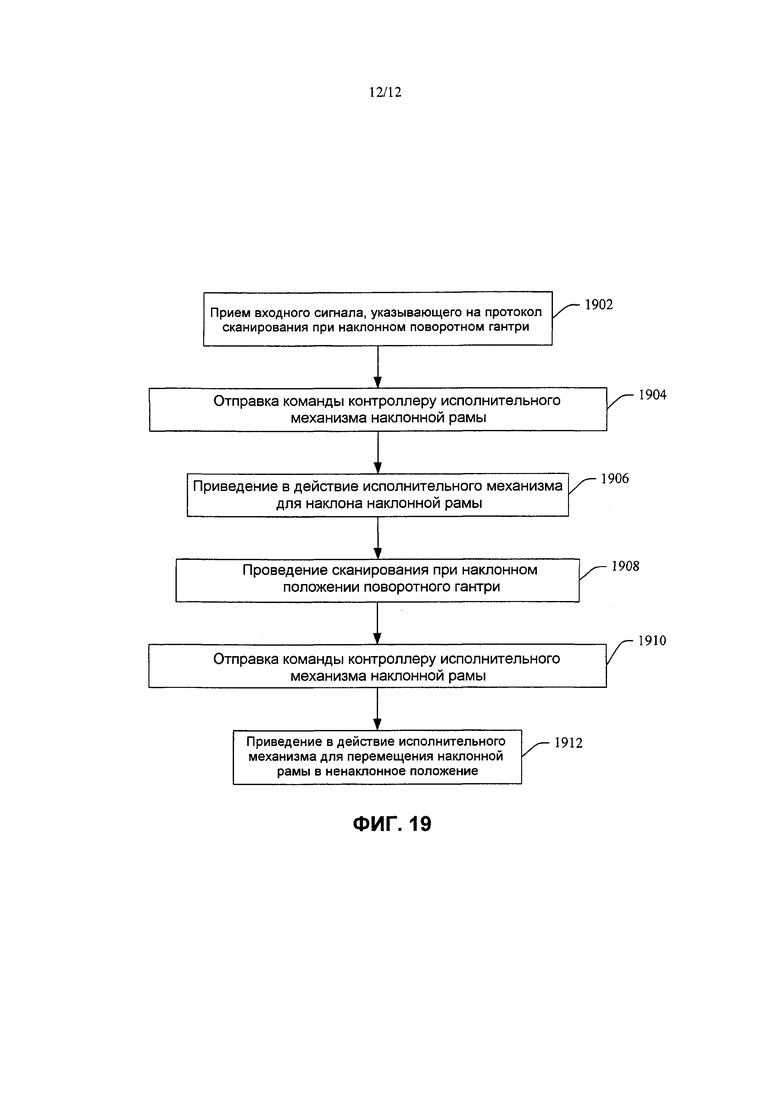
На фиг.19 показан пример способа.
Следует понимать, что порядок действий в описанных способах не является ограничивающим. В этой связи в настоящем описании возможен и другой порядок действий. Кроме того, одно или более действий можно опустить и/или одно или более дополнительных действий можно добавить.
На этапе 1902 консоль системы 500 визуализации принимает сигнал, отражающий протокол сканирования, который включает в себя ненулевой (относительно вертикали) угол наклона поворотного гантри 504. Этот сигнал может быть получен в ответ на выбор пользователем протокола с использованием манипулятора типа «мышь», клавиатуры или другого устройства ввода и/или иным путем.
На этапе 1904 консоль посылает команду контроллеру 529, управляющему исполнительным механизмом 530 наклона. Команда включает в себя указание ненулевого угла наклона.
На этапе 1906 контроллер приводит в действие исполнительный механизм 530 наклона для наклона наклонной рамы 518 на основе указанного угла наклона.
На этапе 1908 выполняется сканирование при наклонном положении поворотного гантри 504.
На этапе 1910 консоль посылает другую команду контроллеру 529, управляющему исполнительным механизмом 530 наклона.
На этапе 1912 контроллер приводит в действие исполнительный механизм 530 наклона для возврата наклонной рамы 518 в свое исходное положение.
Вышеуказанные действия можно реализовать с помощью машиночитаемых команд, которые при их исполнении процессором компьютера предписывают процессору выполнять описанные действия. В этом случае команды хранятся на машиночитаемом носителе, связанном с соответствующим компьютером или доступном для него.
Ниже приведен неограничивающий пример для определения характеристик пригодных листовых пружин. В этом примере более низкое положение оси наклона обеспечивает упругую компенсацию для момента силы при наклоне, который варьируется от 0 до 1000 нм при 30 градусах. Жесткость в случае двух перпендикулярно расположенных листовых пружин, пересекающихся на расстоянии ½ L, определяется соотношением: жесткость = 2EI/L, где максимальное напряжение = φ Et/(2 L), при этом E = модуль упругости листовой пружины, L = длина листовой пружины, I = момент инерции листовой пружины, t = толщина листовой пружины, φ = угол изгиба листовой пружины. Вращательная жесткость определяется соотношением: K=Mmax/φ, где K=954,93 Нм/рад. Если используется сталь с модулем упругости E=2,1E11 Па при длине L=0,2 м и ширине b=0,250 м, толщина пружины определяется соотношением: t=(12KL/2Eb)1/3, где t=3,521×10-3 м. Напряжение при поперечном изгибе определяется соотношением: σ=φEt/2L, где σ=9,679×l08 Н/м2.
Изобретение представлено в настоящем описании со ссылкой на различные варианты осуществления. По прочтении приведенного описания специалисты могут предложить модификации и изменения. Предполагается, что изобретение включает все подобные модификации и изменения в той степени, в которой они не выходят за пределы объема, определяемого прилагаемой формулой изобретения.




Группа изобретений относится к медицинской технике, а именно к системам визуализации. Система визуализации содержит поворотный гантри кольцевой формы и стационарный гантри, при этом стационарный гантри включает в себя основание гантри, наклонную раму кольцевой формы и систему наклона, при этом система наклона содержит одно упругое звено, имеющее первый конец, прикрепленный к основанию гантри, и второй противоположный конец, прикрепленный к наклонной раме, при этом одно упругое звено включает в себя два упругих звена, расположенных под углом друг к другу. Способ визуализации содержит этапы, на которых осуществляется прием сигнала, показывающего угол наклона поворотного гантри системы визуализации и приведение в действие исполнительного механизма наклона системы визуализации для перемещения наклонной рамы системы визуализации в ответ на этот сигнал, при этом наклонная рама крепится к качательной опоре, и поворотный гантри установлен с возможностью вращения на наклонной раме, при этом перемещение наклонной рамы приводит к изгибу качательной опоры вокруг оси наклона качательной опоры, при этом качательная опора содержит одно упругое звено. Изобретения позволяют снизить нагрузку или деформацию на опору основания. 2 н. и 13 з.п. ф-лы, 19 ил.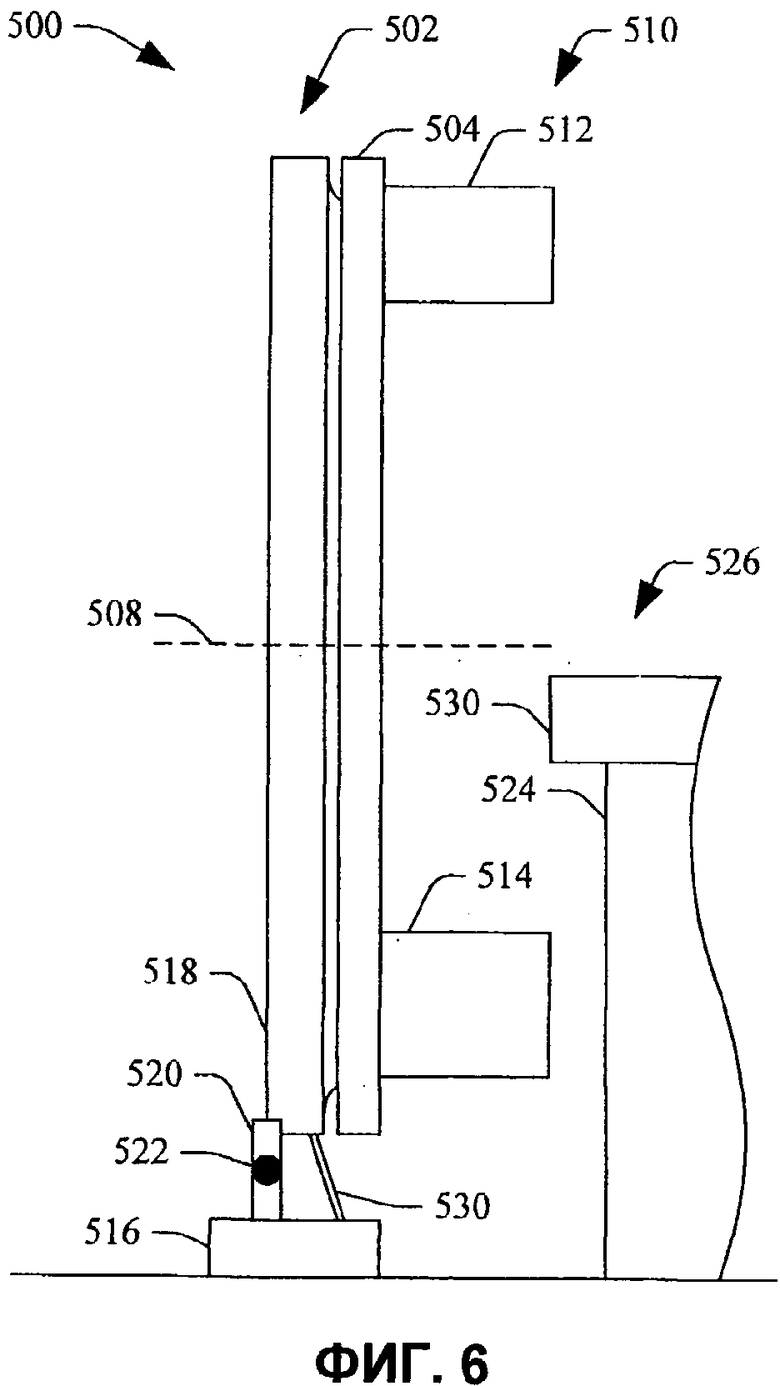
1. Система (500) визуализации, содержащая:
поворотный гантри (504) кольцевой формы, имеющий апертуру (501) и выполненный с возможностью поддержки, по меньшей мере, источника излучения, при этом поворотный гантри совершает вращение вокруг поворотной оси (508) вокруг исследуемой области, причем поворотная ось расположена в апертуре в центральной зоне (508) исследуемой области; и
стационарный гантри (502), приспособленный поддерживать с возможностью вращения поворотный гантри, при этом стационарный гантри включает в себя:
основание (516) гантри;
наклонную раму (518) кольцевой формы, поддерживающую с возможностью вращения поворотный гантри; и
систему (520) наклона, закрепленную на основании гантри и наклонной раме и расположенную между ними, при этом система наклона определяет ось (522) наклона стационарного гантри, причем ось наклона расположена между основанием гантри и поворотной осью, при этом наклонная рама совершает наклон вокруг оси наклона,
отличающаяся тем, что система наклона содержит по меньшей мере одно упругое звено (812, 814, 816, 1102, 1108, 1502, 1504, 1510, 1512, 1702, 1704, 1706), имеющее первый конец (8121, 8141, 8161), прикрепленный к основанию гантри, и второй противоположный конец (8122, 8142, 8162), прикрепленный к наклонной раме, причем это по меньшей мере одно упругое звено совершает переход между изогнутым и неизогнутым состояниями в ответ на перемещение наклонной рамы между вертикальным ненаклонным и наклонным положениями или наклонным и вертикальным ненаклонным положениями, при этом данное по меньшей мере одно упругое звено включает в себя по меньшей мере два упругих звена, расположенных под углом друг к другу, причем ось наклона проходит вдоль линии пересечения этих по меньшей мере двух перпендикулярных упругих звеньев.
2. Система визуализации по п. 1, отличающаяся тем, что ось наклона находится примерно на уровне или ниже апертуры.
3. Система визуализации по п. 1 или 2, отличающаяся тем, что система наклона расположена на по меньшей мере одной стороне (1506, 1516, 1708) поворотного гантри.
4. Система визуализации по п. 1, отличающаяся тем, что ось наклона расположена ниже наклонной рамы.
5. Система визуализации по п. 4, отличающаяся тем, что система наклона расположена ниже апертуры.
6. Система визуализации по п. 5, отличающаяся тем, что система наклона расположена, по меньшей мере, частично под наклонной рамой.
7. Система визуализации по п. 6, отличающаяся тем, что система наклона расположена в области, находящейся в пределах внешнего диаметра наклонной рамы.
8. Система визуализации по п. 1, отличающаяся тем, что упомянутые по меньшей мере два упругих звена пересекаются приблизительно на половине длины первого из этих по меньшей мере двух звеньев и приблизительно на половине длины второго из этих по меньшей мере двух звеньев.
9. Система визуализации по любому из пп. 1, 2 и 4-8, отличающаяся тем, что одно из упомянутых по меньшей мере двух звеньев продолжается вертикально, а другое из упомянутых по меньшей мере двух звеньев продолжается горизонтально.
10. Система визуализации по любому из пп. 1, 2 и 4-8, отличающаяся тем, что одно из упомянутых по меньшей мере двух звеньев продолжается вертикально под ненулевым углом от вертикали, а другое из упомянутых по меньшей мере двух звеньев продолжается горизонтально под ненулевым углом от горизонтали.
11. Система визуализации по любому из пп. 1, 2 и 4-8, отличающаяся тем, что упомянутое по меньшей мере одно упругое звено включает в себя по меньшей мере одно из листовой пружины и спиральной пружины.
12. Система визуализации по любому из пп. 1, 2 и 4-8, отличающаяся тем, что упомянутое по меньшей мере одно упругое звено, будучи изогнутым, противодействует моментной изгибающей нагрузке.
13. Способ визуализации, содержащий:
прием сигнала, показывающего угол наклона поворотного гантри системы визуализации, при этом поворотный гантри имеет кольцевую форму и имеет апертуру, а также совершает вращение вокруг поворотной оси, расположенной в центральной области апертуры; и
приведение в действие исполнительного механизма наклона системы визуализации для перемещения наклонной рамы системы визуализации в ответ на этот сигнал,
при этом наклонная рама крепится к качательной опоре, и поворотный гантри установлен с возможностью вращения на наклонной раме,
при этом перемещение наклонной рамы приводит к изгибу качательной опоры вокруг оси наклона качательной опоры, тем самым наклоняя наклонную раму и поворотный гантри вокруг оси наклона, причем ось наклона расположена ниже поворотной оси,
отличающийся тем, что качательная опора содержит по меньшей мере одно упругое звено (812, 814, 816, 1102, 1108, 1502, 1504, 1510, 1512, 1702, 1704, 1706), имеющее первый конец (812l, 8141, 8161), прикрепленный к основанию гантри, и второй противоположный конец (8122, 8142, 8162), прикрепленный к наклонной раме, причем это по меньшей мере одно упругое звено совершает переход между изогнутым и неизогнутым состояниями в ответ на перемещение наклонной рамы между вертикальным ненаклонным и наклонным положениями или наклонным и вертикальным ненаклонным положениями, при этом упомянутое по меньшей мере одно упругое звено включает в себя по меньшей мере два упругих звена, расположенных под углом друг к другу, причем ось наклона проходит вдоль линии пересечения этих по меньшей мере двух перпендикулярных упругих звеньев.
14. Способ по п. 13, отличающийся тем, что ось наклона расположена ниже апертуры наклонной рамы.
15. Способ по п. 14, отличающийся тем, что ось наклона расположена ниже наклонной рамы.
| US 2010142669 A1, 10.06.2010 | |||
| WO2010052623 A1, 14.05.2010 | |||
| US 4928292 A, 22.05.1990 | |||
| US 4750195 A, 07.06.1988 | |||
| RU 2009108318 A, 20.09.2010. |

