ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к технике высокоинтенсивного фокусированного ультразвука, в частности, к определению максимальной энергии обработки ультразвуком (соникации).
УРОВЕНЬ ТЕХНИКИ
Ультразвук от сфокусированного ультразвукового преобразователя может быть использован для выборочной обработки областей внутри тела человека. Ультразвуковые волны распространяются как механические колебания высокой энергии. Эти колебания вызывают нагрев ткани вследствие их поглощения, и также они могут приводить к кавитации. И нагревание ткани, и кавитация, могут быть использованы для разрушения ткани в клинических условиях. Однако, нагревание ткани ультразвуком легче контролировать, нежели кавитацию. Обработки ультразвуком могут быть использованы для абляции ткани и выборочного удаления областей раковых клеток. Эта методика применялась при лечении утробных фиброзных опухолей и снизила необходимость в процедурах гистерэктомии.
Для выборочной обработки ткани, фокусированный ультразвуковой преобразователь может быть использован для фокусировки ультразвука на конкретную область обработки, или на целевой объем. Преобразователь обычно устанавливается внутри среды, такой как дегазированная вода, которая может транслировать ультразвук. Затем, для регулировки положения ультразвукового преобразователя и, тем самым, для выбора области обрабатываемой ткани, используются исполнительные механические приводы.
Фокусированные ультразвуковые преобразователи обычно также имеют множественные элементы преобразователя, причем амплитуда и/или фаза элементов преобразователя контролируется. В частности, фаза отдельного элемента или групп элементов преобразователя часто контролируется для управления местоположением фокуса ультразвука. Это позволяет выполнять быструю регулировку местоположения фокуса и последовательную соникацию различных точек, или местоположений соникации. Ткань субъекта между преобразователем и точкой соникации обычно рассматривается как область ближнего поля. Ультразвук распространяется через область ближнего поля к объему соникации. Эта промежуточная ткань также нагревается, хотя и не на столько, на сколько объем соникации. При соникации множественных точек соникации, область ближнего поля различных точек соникации может перекрываться. Поскольку конкретный участок области ближнего поля может перекрываться, то он может быть нагрет много раз. Чтобы избежать перегрева этой перекрывающейся области ближнего поля, возможно необходимы задержки между соникациями для множественных точек соникации.
Патент США 8,016,757 B2 раскрывает методику неинвазивной оценки температуры для терапии HIFU, используя рассеянный назад ультразвук. Ультразвуковые данные собираются из теплового источника и массы ткани перед инициализацией терапии для измерения двух параметров уравнения передачи био-тепла (BHTE). После калибровки для конкретной массы ткани и определенного теплового источника, BHTE может быть использовано для создания кривой зависимости температуры, калиброванной для теплового источника и ткани, и для создания пространственно-временной карты температуры для облегчения планирования терапии. Международная заявка WO2010/029479 раскрывает систему терапии, снабженную модулем управления для предоставления оценки индуцированного нагрева перед подачей энергии.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Изобретение предоставляет медицинское устройство, компьютерный программный продукт, и способ в независимых пунктах формулы. Варианты реализации даются в зависимых пунктах формулы.
Как должно быть ясно специалистам в данной области техники, объекты настоящего изобретения могут быть воплощены как устройство, способ или компьютерный программный продукт. Соответственно, объекты настоящего изобретения могут принимать форму полностью аппаратного варианта реализации, полностью программного варианта реализации (включая встроенное программное обеспечение, резидентное программное обеспечение, микропрограмму, и т.д.), или варианта реализации, объединяющего объекты и программного обеспечения, и оборудования, которые все в целом могут обозначаться здесь как "электронная схема", "модуль" или "система". Кроме того, объекты настоящего изобретения могут принять форму компьютерного программного продукта, воплощенного в одной, или нескольких, компьютерной считываемой среде(-ах), содержащей исполняемый компьютером код.
Любая комбинация одной, или нескольких, компьютерной считываемой среды(-ед) может быть использована. Машиночитаемая среда может быть машиночитаемой средой передачи сигнала или машиночитаемым носителем данных. "Машиночитаемый носитель данных" в данном случае означает любой материальный носитель данных, который может хранить команды, выполняемые процессором вычислительного устройства. Машиночитаемый носитель данных может обозначаться как машиночитаемый энергонезависимый носитель данных. Машиночитаемый носитель данных может также обозначаться как материальный машиночитаемый носитель. В некоторых вариантах реализации, машиночитаемый носитель данных также может иметь возможность хранения данных, к которым может обращаться процессор вычислительного устройства. Примеры машиночитаемых носителей данных включают в себя, но без ограничения: гибкий диск, магнитный жесткий диск, полупроводниковый жесткий диск, флэш-память, USB флэш-память, устройства оперативной памяти (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск, и файл регистра процессора. Примеры оптических дисков включают в себя Компакт-диски (CD) и Цифровые Универсальные Диски (DVD), например, CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW, или диски DVD-R. Термин "машиночитаемый носитель данных" также относится к различным носителям записи, к которым может обращаться компьютерное устройство через сеть или через канал связи. Например, данные могут быть найдены с помощью модема по Интернету, или по локальной сети. Машиноисполняемый код, реализованный на машиночитаемом носителе, может быть передан с использованием любой соответствующей среды, включая, но без ограничения, среды беспроводной связи, проводной связи, оптический волоконный кабель, радиочастотную связь, и т.д., или любую подходящую комбинацию вышеназванного.
Машиночитаемая среда передачи сигнала может включать в себя распространяющийся сигнал данных с находящимся в нем машиноисполняемым кодом, например, в полосе основных немодулированных частот или как часть несущей частоты. Такой распространяющийся сигнал может иметь любую форму, включая в себя, но без ограничений, электромагнитный, оптический, или любую подходящую их комбинацию. Машиночитаемая среда передачи сигнала может быть любой машиночитаемой средой, которая не является машиночитаемым носителем данных, и которая может передать, распространить, или транспортировать программу для использования, сама или в соединении с системой выполнения команд, аппаратом, или устройством.
"Компьютерное устройство памяти" или "память" - это пример читаемого компьютером носителя данных. Компьютерная память - это любая память, которая является непосредственно доступной для процессора. "Компьютерное запоминающее устройство" или "запоминающее устройство" - это дополнительный пример читаемого компьютером носителя данных. Компьютерное запоминающее устройство - это любой энергонезависимый читаемый компьютером носитель данных. В некоторых вариантах реализации компьютерное запоминающее устройство также может быть компьютерной памятью, или наоборот.
"Процессор" в данном случае означает электронный компонент, который имеет возможность выполнять программу или машинную выполняемую команду. Ссылки на вычислительное устройство, содержащее "процессор", следует относить к устройству, возможно содержащему больше чем один процессор или обрабатывающее ядро. Процессор может быть, например, многоядерным процессором. Процессор может также относиться к набору процессоров в пределах отдельной компьютерной системы или распределенному по множеству компьютерных систем. Термин "вычислительное устройство" должен также интерпретироваться как возможно относящийся к набору или сети вычислительных устройств, каждое содержащее процессор или процессоры. Компьютерный выполняемый код может выполняться множественными процессорами, которые могут быть в пределах одного и того же вычислительного устройства, или которые даже могут быть распределены по множественным вычислительным устройствам.
Компьютерный исполняемый код может содержать машинные исполняемые команды или программу, которая побуждает процессор выполнять объект настоящего изобретения. Компьютерный исполняемый код, для выполнения операций для объектов настоящего изобретения, может быть написан в любой комбинации одного или нескольких языков программирования, включая в себя объектно-ориентированные языки программирования, такие как Java, Smalltalk, C++, или подобные, и обычные процедурные языки программирования, такие как язык программирования "C", или подобные языки программирования и компилированные в машинные исполняемые команды. В некоторых случаях компьютерный исполняемый код может быть в форме языка высокого уровня или в предкомпилированной форме и используемый вместе с интерпретатором, который по ходу работы создает машинные исполняемые команды.
Компьютерный исполняемый код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программ, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии, удаленный компьютер может быть связан с компьютером пользователя через сеть любого типа, включая в себя локальную сеть (LAN) или глобальную сеть (WAN), или может быть выполнено подключение к внешнему компьютеру (например, через Интернет, используя провайдер услуг интернета).
Объекты настоящего изобретения описаны в отношении иллюстраций блок-схемы последовательности операций и/или блок-схем способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами реализации изобретения. Следует понимать, что каждый блок, или участок блоков, блок-схемы последовательности операций, иллюстраций, и/или блок-схем, могут быть осуществлены командами компьютерной программы в форме исполняемого компьютером кода, когда это применимо. Кроме того, следует понимать, что если нет взаимного исключения, комбинации блоков в различных блок-схемах последовательности операций, иллюстрации, и/или блок-схемы могут быть объединены. Эти команды компьютерной программы могут быть предоставлены на процессор общего компьютера, специального компьютера, или другого программируемого устройства обработки данных, чтобы создать такой механизм, когда команды, которые выполняются процессором компьютера, или другим программируемым устройством обработки данных, создают средство для осуществления функций/действий, определенных в блок-схеме последовательности операций и/или блок-схеме блока, или блоков.
Эти команды компьютерной программы также могут быть сохранены в компьютерной читаемой среде, которая может побуждать компьютер, другое программируемое устройство обработки данных, или другие устройства, функционировать специальным образом, так, чтобы команды, сохраняемые в компьютерной читаемой среде, производили готовое изделие, включая команды, которые осуществляют функцию/действие, определенную в блоке блок-схемы последовательности операций и/или в блоке блок-схемы, или в блоках.
Команды компьютерной программы также могут быть загружены на компьютер, другое программируемое устройство обработки данных, или другие устройства, для инициирования последовательности операционных этапов, выполняемых на компьютере, другом программируемом устройстве или других устройствах, чтобы произвести осуществляемый компьютером процесс так, чтобы команды, которые выполняются на компьютере, или другом программируемом устройстве, обеспечивали процессы для осуществления функций/действий, определенных в блоке блок-схемы последовательности операций и/или в блоке блок-схемы, или в блоках.
"Пользовательский интерфейс" - это в данном случае интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. "Пользовательский интерфейс" может также обозначаться как "человеко-машинный интерфейс". Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может давать возможность ввода данных от оператора, принимаемых компьютером, и может обеспечить вывод данных пользователю от компьютера. Иначе говоря, пользовательский интерфейс может позволить оператору управлять или манипулировать компьютером, и интерфейс может позволить компьютеру указывать эффекты от управления или манипуляции оператором. Визуализация данных или информации на устройстве отображения или графическом пользовательском интерфейсе - это пример предоставления информации оператору. Прием данных через клавиатуру, мышь, координатный шар, сенсорную панель, ручку-указатель, графический планшет, джойстик, геймпад, вебкамеру, наушники, рычаги передачи, руль, педали, проводную перчатку, музыкальный планшет, дистанционное управление, и акселерометр - это все примеры компонентов пользовательского интерфейса, которые допускают прием информации или данных от оператора.
"Интерфейс аппаратных средств" в данном случае означает интерфейс, который позволяет процессору компьютерной системы взаимодействовать и/или управлять внешним компьютерным устройством и/или аппаратом. Интерфейс аппаратных средств может позволить процессору посылать сигналы управления или команды на внешнее вычислительное устройство и/или аппарат. Интерфейс аппаратных средств может также позволить процессору обмениваться данными с внешним вычислительным устройством и/или аппаратом. Примеры интерфейса аппаратных средств включают в себя, но без ограничения: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS 232, порт IEEE 488, подключение Bluetooth, подключение беспроводной локальной сети, подключение TCP/IP, подключение Ethernet, интерфейс управления напряжением, интерфейс MIDI, аналоговый входной интерфейс, и цифровой входной интерфейс.
"Устройство отображение" или "дисплейное устройство" в данном случае означает устройство вывода данных, или пользовательский интерфейс, приспособленный для отображения изображений или данных. Устройство отображения может вывести визуальные, звуковые, и или осязательные данные. Примеры устройства отображения включают в себя, но без ограничения: компьютерный монитор, телевизионный экран, сенсорный экран, осязательный электронный дисплей, экран для слепых, электронно-лучевая трубка (CRT), электронно-лучевая запоминающая трубка, бистабильный дисплей, электронная бумага, векторный дисплей, индикаторная панель, вакуумный флуоресцентный дисплей (VF), дисплеи на светоизлучающих диодах (LED), электролюминесцентный дисплей (ELD), плазменные дисплейные панели (PDP), жидкокристаллические дисплеи (LCD), дисплеи на органических светоизлучающих диодах (OLED), проектор, и дисплей-шлем.
"Ультразвуковое окно" в данном случае означает окно, которое пригодно для передачи ультразвуковых волн, или энергии ультразвука. Обычно, как ультразвуковое окно используются тонкая пленка, или мембрана. Ультразвуковое окно может, например, быть выполнено из тонкой мембраны BoPET (биаксиально-ориентированный терефталат полиэтилена).
В одном объекте изобретение предоставляет медицинское устройство, содержащее систему высокоинтенсивного фокусированного ультразвука для соникации субъекта. Медицинское устройство дополнительно содержит процессор для управления медицинским устройством. Медицинское устройство дополнительно содержит память для хранения машиноисполняемых команд для их выполнения процессором. Выполнение команд побуждает процессор производить данные соникации, характеризующие предшествующую соникацию субъекта для системы высокоинтенсивного фокусированного ультразвука. Данные предшествующей соникации могут быть использованы для управления системой высокоинтенсивного фокусированного ультразвука относительно предшествующей соникации, или это могут быть данные, характеризующие местоположение различных точек соникации и то, как они были обработаны ультразвуком с помощью системы высокоинтенсивного фокусированного ультразвука. Данные предшествующей соникации фактически характеризуют то, как ультразвук вводится и фокусируется в субъекте. Данные предшествующей соникации могут также содержать времена, продолжительности и уровни мощности, использованные для предшествующей соникации.
Выполнение команд дополнительно побуждает процессор создавать карту тепловых свойств субъекта, используя данные предшествующей соникации и термоакустическую модель. Карта тепловых свойств является пространственно-зависимой и зависимой от времени. То есть карта тепловых свойств отображает тепловое свойство как пространственно зависимое, а также зависящее от времени. Например, если тепловое свойство будет температурой или плотностью энергии, наложенной на субъекта во времени, то энергия будет рассеиваться и температура возвратится к нормальной температуре тела. Выполнение команд дополнительно побуждает процессор определять карту максимальной энергии, используя термоакустическую модель и карту тепловых свойств. Максимальная энергия зависима от времени. Карта максимальной энергии отображает максимальную энергию, которая может быть выделена в объеме субъекта. Эта максимальная энергия может быть определена выполнением расчета по термоакустической модели и моделированием эффектов от выполнения другой соникации в пространственно различающихся положениях.
Обычно, максимальная энергия для конкретного местоположения может быть ограничена предшествующей соникацией, поскольку ультразвук проходит через субъект расстояние до фокальной точки системы высокоинтенсивного фокусированного ультразвука. В частности, область ближнего поля представляет собой область между преобразователем системы высокоинтенсивного фокусированного ультразвука и фокальной точкой. При выполнении повторяющейся соникации, область ближнего поля может оказаться нагретой. Может оказаться необходимым сделать так, чтобы точки соникации были бы обработаны ультразвуком в более позднее время для избежания перегрева области ближнего поля. Выполнение команд дополнительно побуждает процессор принимать выбор, по меньшей мере, одного объема соникации, от пользовательского интерфейса. Объем соникации в данном случае представляет собой объем субъекта, который определяется как объем обрабатываемый ультразвуком, или как выбранный для обработки объем. По существу, оператор медицинского устройства может смотреть на карту максимальной энергии и видеть, в какие области субъекта оператор может ввести энергию в данный момент времени. Отображая эти данные пространственно, оператор может иметь возможность более эффективно использовать медицинское устройство. Представление карты максимальной энергии может идентифицировать области, которые оператор может обработать ультразвуком немедленно, или после короткого промежутка времени. Это может сократить время охлаждения, и затраты, связанные с системами высокоинтенсивного фокусированного ультразвука.
В другом варианте реализации, система высокоинтенсивного фокусированного ультразвука содержит ультразвуковой преобразователь, действующий для фокусировки ультразвука в объем соникации. Объем соникации может быть, по меньшей мере, одним из объемов соникации, которые были выбраны с использованием интерфейса. Термоакустическая модель функционирует для определения карты тепловых свойств в области соникации субъекта. Область соникации в данном случае охватывает область субъекта, через которую измеримый, или значительный, уровень ультразвука проходит через субъекта. Это может включать в себя не только объем соникации, но также и область ближнего поля, и область дальнего поля. Термоакустическая модель функционирует для определения предсказываемой карты тепловых свойств в области соникации, используя карту тепловых свойств и предсказанную геометрию ультразвукового пучка.
Геометрия ультразвукового пучка может быть определена, используя модель ультразвукового преобразователя и выбор, по меньшей мере, одного объема соникации от пользовательского интерфейса. То есть эффект от соникации, по меньшей мере, одного объема соникации, может быть предсказан, используя карту тепловых свойств и термоакустическую модель. Предсказанная карта тепловых свойств отображает тепловые свойства. Предсказанная карта тепловых свойств является пространственно-зависимой. В некоторых вариантах реализации, карта тепловых свойств может также быть зависимой от времени. Термоакустическая модель функционирует для определения максимальной мощности для каждого объема соникации, ограничивая максимальное тепловое свойство в предсказанной тепловой карте свойств до заданного максимального значения. Например, термоакустическая модель может моделировать область ближнего поля и гарантировать, что она не перегревается множественными соникациями.
В некоторых вариантах реализации, вместо карты тепловых свойств, определеной для области соникации, она может быть ограничена областью ближнего поля между ультразвуковым преобразователем и объемом соникации. Это может быть полезным в некоторых вариантах реализации, поскольку может оказаться, что проще рассчитать карту тепловых свойств в области ближнего поля, предполагая, что субъект является однородным.
В другом варианте реализации, выполнение команд дополнительно побуждает процессор вычислять карту уровня энергии, используя геометрию пучка, максимальную мощность и термоакустическую модель. Выполнение команд дополнительно побуждает процессор отображать карту уровня энергии на устройстве отображения. Карта уровня энергии в данном случае – это пространственное отображение, которое оценивает плотность энергии на траектории пучка системы высокоинтенсивного фокусированного ультразвука. В этом варианте реализации, и карта уровня энергии, и карта максимальной энергии отображаются на устройстве отображения. Как альтернатива, может быть отображена только карта уровня энергии.
В другом варианте реализации, ультразвуковой преобразователь содержит множественные элементы ультразвукового преобразователя. Множественные элементы ультразвукового преобразователя являются управляемыми. Управляемые элементы - это в данном случае следует понимать как то, что фазой и/или амплитудой электрического сигнала, подаваемого на элементы преобразователя, можно управлять, индивидуально, или совместно. Множественные элементы ультразвукового преобразователя функционируют для регулировки траектории ультразвукового пучка между ультразвуковым преобразователем и объемом соникации. Предсказанная геометрия ультразвукового пучка описывает траекторию ультразвукового пучка. Термоакустическая модель дополнительно функционирует для определения предсказываемой карты тепловых свойств, вычисляя корректировки геометрии ультразвукового пучка с использованием модели траектории пучка ультразвукового преобразователя. По существу, траектория пучка может быть аппроксимирована, или предсказана, с использованием модели. Простые модели, такие как способ трассировки лучей, или предположение геометрической формы, которые отображают траекторию пучка, оказываются простыми вычислительными методиками для ее расчета.
Предсказанная геометрия ультразвукового пучка представляет собой траекторию пучка ультразвука, создаваемого ультразвуковым преобразователем.
В другом варианте реализации, используется регулировка геометрии ультразвукового пучка при соникации.
В другом варианте реализации, медицинский инструмент дополнительно содержит исполнительный механический привод ультразвукового преобразователя для перемещения ультразвукового преобразователя. Привод ультразвукового преобразователя определяет местоположение преобразователя. Выполнение команд дополнительно побуждает процессор определять предсказанную карту тепловых свойств, вычисляя корректировки местоположения преобразователя и используя модель поступательного перемещения ультразвукового преобразователя. В дополнение к возможности электронной регулировки, ультразвуковой преобразователь может также иметь возможность перемещения в пространстве. Это может быть использовано для контроля того, где ультразвук фокусируется.
Магнитно-резонансные (MR) данные определяются в данном случае как зарегистрированные измерения радиочастотных сигналов, испускаемых атомными спинами, антенной магнитно-резонансного устройства во время скана магнитно-резонансной визуализации. Изображение магнитно-резонансной визуализации (MRI) определяется в данном случае как восстановленная двух- или трехмерная визуализация анатомических данных, содержащихся в пределах данных магнитно-резонансной визуализации. Эта визуализация может быть выполнена с использованием компьютера.
Данные MR термометрии определяются в данном случае как зарегистрированные измерения радиочастотных сигналов, испускаемых атомными спинами, антенной магнитно-резонансного устройства во время скана магнитно-резонансной визуализации, содержащей информацию, которая может быть использована для магнитно-резонансной термометрии. Магнитно-резонансная термометрия функционирует посредством измерения изменений температурно-чувствительных параметров. Примеры параметров, которые могут быть измерены при магнитно-резонансной термометрии: сдвиг частоты протонного резонанса, коэффициент диффузии, или изменения времен релаксации T1 и/или T2 могут быть использованы для измерения температуры, используя магнитный резонанс. Сдвиг частоты протонного резонанса является температурно-зависимым, поскольку магнитное поле, воздействию которого подвергаются отдельные протоны, водородные атомы, зависит от окружающей молекулярной структуры. С увеличением температуры уменьшается молекулярное экранирование, обусловленное влиянием температуры на водородные связи. Это приводит к температурной зависимости частоты протонного резонанса.
Протонная плотность линейно зависит от равновесной намагниченности. Поэтому, оказывается возможным определить изменения температуры, используя взвешенные изображения протонной плотности.
Времена релаксации Т1, T2, и T2-со звездой (иногда обозначаемое как T2*) также температурно-зависимы. Реконструкция взвешенных изображений Т1, T2, и T2-со звездой может, поэтому, быть использована для создания тепловых, или температурных, карт.
Температура также влияет на Броуновское движение молекул в водном растворе. Поэтому, импульсные последовательности, с которыми оказывается возможным измерить коэффициенты диффузии, такие как импульсное диффузионное градиентное спиновое эхо, могут быть использованы для измерения температуры.
Один из наиболее полезных способов измерения температуры с использованием магнитного резонанса, это измерение сдвига частоты протонного резонанса (PRF) водных протонов. Резонансная частота протонов зависит от температуры. При изменении температуры в элементе объема, сдвиг частоты приведет к изменению измеряемой фазы водных протонов. Поэтому, может быть определено изменение температуры между двумя изображениями фазы. Этот способ определения температуры имеет преимущество в том, что он является относительно быстрым, по сравнению с другими способами. Способ PRF обсуждается здесь более подробно, чем другие способы. Однако, обсуждаемые здесь способы и методики также применимы и к другим способам выполнения термометрии с магнитно-резонансной визуализацией.
В другом варианте реализации, медицинское устройство дополнительно содержит систему магнитно-резонансной визуализации для сбора тепловых магнитно-резонансных данных из зоны визуализации. Область соникации находится в пределах зоны визуализации. Выполнение команд дополнительно побуждает процессор многократно собирать магнитно-резонансные тепловые данные из области соникации. Выполнение команд дополнительно побуждает процессор восстанавливать карту уровней изменения температуры, используя многократно собираемые магнитно-резонансные тепловые данные.
В другом варианте реализации, система магнитно-резонансной визуализации используется для сбора магнитно-резонансных данных, которые используются для поддержки системы высокоинтенсивного фокусированного ультразвука. Например, медицинские изображения могут быть зарегистрированы для местоположения субъекта и также отображаться на устройстве отображения.
В другом варианте реализации, выполнение команд побуждает процессор отображать карту уровней изменения температуры на устройстве отображения. Этот вариант реализации может быть преимущественным, поскольку карта уровней изменения температуры может указать свойства ткани субъекта, что полезно для выбора места соникации.
В другом варианте реализации, выполнение команд дополнительно побуждает процессор модифицировать термоакустическую модель, используя карту уровней изменения температуры. Например, термоакустическая модель может предполагать, что энергия или температура в конкретном местоположении рассеиваются до определенного уровня. При измерении фактического уровня изменения температуры, термоакустическая модель может быть обновлена или скорректирована для конкретного субъекта.
В другом варианте реализации, выполнение команд дополнительно побуждает процессор принимать энергию соникации. Выполнение команд дополнительно побуждает процессор определять карту времени охлаждения, используя энергию соникации и термоакустическую модель. Время охлаждения является пространственно-зависимым и описывает то, когда выбранный объем соникации может быть обработан ультразвуком с данной энергией соникации. Выбранный объем соникации в данном случае задается как произвольный объемом, который выбирается для обработки ультразвуком. Карта времени охлаждения является зависимой от времени. Выполнение команд дополнительно побуждает процессор отображать карту времени охлаждения на устройстве отображения. Карта времени охлаждения отображается на пользовательском интерфейсе прежде, чем выбор, по меньшей мере, одного объема соникации принят от пользовательского интерфейса. Энергия соникации может быть, например, задана заранее, и она может быть введена от пользовательского интерфейса, или принята из плана лечения, или от других команд.
Мощность соникации в данном случае - это мощность, сфокусированная в объем соникации.
В другом варианте реализации, карта времени охлаждения определяется также, используя изменение траектории пучка для системы высокоинтенсивного фокусированного ультразвука. Например, траектория пучка может быть изменена так, что время охлаждения отображается для конкретной области на карте.
В другом варианте реализации, выполнение команд дополнительно побуждает процессор принимать продолжительность соникации. Карта максимальной энергии выражается как карта максимальной мощности. Вместо того, чтобы отображать карту энергии, карта максимальной энергии отображается как максимальная мощность, которую оператор может направить на конкретный объем субъекта за данный период времени. Продолжительность соникации может быть принята через пользовательский интерфейс, она может быть задана заранее, или может быть принята через команды, такие как план лечения.
В другом варианте реализации, выполнение команд дополнительно побуждает процессор создавать команды соникации, используя выбор, по меньшей мере, одного объема соникации. Выполнение команд дополнительно побуждает процессор управлять системой высокоинтенсивного фокусированного ультразвука для обработки ультразвуком, по меньшей мере, одного объема соникации, используя команды соникации.
В другом варианте реализации, выполнение команд дополнительно побуждает процессор определять обновленную карту максимальной мощности, используя карту тепловых свойств, команды соникации, и термоакустическую модель. Обновленная карта максимальной энергии является зависимой от времени. Она также может быть пространственно-зависимым отображением.
Выполнение команд дополнительно побуждает процессор отображать обновленную карту энергии на устройстве отображения. Выполнение команд дополнительно побуждает процессор принимать обновленный выбор, по меньшей мере, одного объема соникации от пользовательского интерфейса.
В другом варианте реализации, тепловое свойство представляет собой температуру.
В другом варианте реализации, тепловое свойство представляет собой тепловую дозу.
В другом варианте реализации, тепловое свойство представляет собой плотность энергии.
В другом объекте изобретение предоставляет компьютерный программный продукт, содержащий машиноисполняемые команды для выполнения процессором, управляющим медицинским устройством. Медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука для соникации субъекта. Выполнение команд побуждает процессор принимать данные предшествующей соникации, характеризующие предшествующую соникацию субъекта системой высокоинтенсивного фокусированного ультразвука. Выполнение команд дополнительно побуждает процессор создавать карту тепловых свойств субъекта, используя данные предшествующей соникации и термоакустическую модель. Карта тепловых свойств отображает тепловые свойства. Карта тепловых свойств является пространственно-зависимой и зависимой от времени. Выполнение команд дополнительно побуждает процессор определять карту максимальной энергии, используя термоакустическую модель. Максимальная энергия является зависимой от времени. Максимальная энергия может также быть пространственно-зависимой. Выполнение команд дополнительно побуждает процессор отображать карту максимальной энергии на устройстве отображения. Выполнение команд дополнительно побуждает процессор принимать выбор, по меньшей мере, одного объема соникации от пользовательского интерфейса.
В другом объекте изобретение предоставляет способ действия медицинского устройства. Медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука для соникации субъекта. Способ содержит этап приема данных предшествующей соникации, показательных для предшествующей соникации субъекта, системой высокоинтенсивного фокусированного ультразвука. Способ дополнительно содержит этап построения карты тепловых свойств субъекта, используя данные предшествующей соникации и термоакустическую модель. Карта тепловых свойств отображает тепловые свойства. Карта тепловых свойств является пространственно-зависимой и зависимой от времени. Способ дополнительно содержит этап определения карты максимальной энергии, используя термоакустическую модель. Максимальная энергия является зависимой от времени. Способ дополнительно содержит этап отображения карты максимальной энергии на устройстве отображения. Способ дополнительно содержит этап приема выбора, по меньшей мере, одного объема соникации, от пользовательского интерфейса.
Следует иметь в виду, что один или более из вышеупомянутых вариантов реализации изобретения могут быть объединены, если только объединяемые варианты реализации не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предпочтительные варианты реализации изобретения рассматриваются ниже только в качестве примера и в связи с чертежами, на которых:
Фиг. 1 изображает блок-схему последовательности операций, которая иллюстрирует способ в соответствии с вариантом реализации изобретения;
Фиг. 2 - блок-схема последовательности операций, которая иллюстрирует способ в соответствии с дополнительным вариантом реализации изобретения;
Фиг. 3 - блок-схема последовательности операций, которая иллюстрирует способ в соответствии с дополнительным вариантом реализации изобретения;
Фиг. 4 - блок-схема, которая иллюстрирует альтернативный способ;
Фиг. 5 - медицинский инструмент в соответствии с вариантом реализации изобретения;
Фиг. 6 - участок Фиг. 5, и
Фиг. 7 - медицинский инструмент в соответствии с дополнительным вариантом реализации изобретения; и
Фиг. 8 - медицинский инструмент в соответствии с дополнительным вариантом реализации изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Подобным образом пронумерованные элементы на чертежах являются или эквивалентными элементами, или выполняют ту же самую функцию. Элементы, которые предварительно рассматривались, не обязательно рассматриваются ниже на чертежах, если их функция оказывается эквивалентной.
На Фиг. 1 показана блок-схема последовательности операций, которая иллюстрирует способ в соответствии с вариантом реализации изобретения. Вначале, на этапе 100, принимаются данные предшествующей соникации. Данные предшествующей соникации характеризуют предшествующую соникацию субъекта системой высокоинтенсивного фокусированного ультразвука. Затем, на этапе 102, стоится карта тепловых свойств субъекта, используя данные предшествующей соникации и термоакустическую модель. Карта тепловых свойств отображает тепловые свойства. Карта тепловых свойств является пространственно-зависимой и зависимой от времени. Затем, на этапе 104 карта максимальной энергии определяется, или строится, используя термоакустическую модель и карту тепловых свойств. Максимальная энергия является зависимой от времени. Затем, на этапе 106, карта максимальной энергии отображается на устройстве отображения. Затем, наконец, на этапе 108, от пользовательского интерфейса принимается выбор, по меньшей мере, одного объема соникации. Пользовательский интерфейс может, например, быть отображен на устройстве отображения с картой максимальной энергии.
На Фиг. 2 показана блок-схема последовательности операций, которая иллюстрирует способ в соответствии с дополнительным вариантом реализации изобретения. Этапы 200-208 этого способа эквивалентны этапам 100-108 способа, показанного на Фиг. 1. Вначале, на этапе 200, принимаются данные предшествующей соникации. Затем, на этапе 202, строится карта тепловых свойств, используя термоакустическую модель и данные предшествующей соникации. Затем, на этапе 204, строится карта максимальной энергии, используя термоакустическую модель и карту тепловых свойств. Затем, на этапе 206, карта максимальной энергии отображается на устройстве отображения. Затем, на этапе номер 208, выбор, по меньшей мере, одного объема соникации принимается от пользовательского интерфейса. Затем, на этапе 210, создается набор команд соникации, используя выбор, по меньшей мере, одного объема соникации. Команды соникации представляют собой команды, которые функционируют для инициализации соникации фокусированным ультразвуком высокой интенсивности, по меньшей мере, одного выбранного объема соникации. Затем, наконец, на этапе 212, система высокоинтенсивного фокусированного ультразвука управляется, используя команды соникации для соникации, по меньшей мере, одного объема соникации.
На Фиг. 3 показана блок-схема последовательности операций, которая иллюстрирует способ в соответствии с вариантом реализации изобретения. Вначале, на этапе 300, магнитно-резонансные тепловые данные собираются из области соникации, используя систему магнитно-резонансной визуализации. Затем, на этапе 302, восстанавливается карта изменения температуры, используя тепловые данные магнитно-резонансной визуализации. Затем, на этапе 304, принимаются данные предшествующей соникации. Тепловые данные магнитно-резонансной визуализации могут быть собраны во время предшествующей соникации. Затем, на этапе 306, строится карта тепловых свойств, используя термоакустическую модель и данные предшествующей соникации. Затем, на этапе 308, строится карта максимальной энергии, используя термоакустическую модель и карту тепловых свойств. Затем, на этапе 310, карта максимальной энергии и/или карта изменения температуры отображаются на устройстве отображения. Затем, на этапе 312, выбор, по меньшей мере, одного объема соникации, принимается от пользовательского интерфейса. Затем, на этапе 314, создаются команды соникации, используя выбор, по меньшей мере, одного объема соникации. Затем, наконец, на этапе 316, система высокоинтенсивного фокусированного ультразвука управляется, используя команды соникации. Это побуждает систему высокоинтенсивного фокусированного ультразвука обработать ультразвуком, по меньшей мере, один объем соникации, который был выбран.
На Фиг. 4 показана блок-схема последовательности операций альтернативного способа. Вначале, на этапе 400, принимаются данные предшествующей соникации. Затем, на этапе 402, строится карта тепловых свойств, используя термоакустическую модель и данные предшествующей соникации. Затем, на этапе 404, принимается энергия соникации. Затем, на этапе 406, строится карта времени охлаждения, используя термоакустическую модель и карту тепловых свойств. Затем, на этапе 408, карта времени охлаждения отображается на устройстве отображения. Затем, наконец, на этапе 410, выбор, по меньшей мере, одного объема соникации принимается от пользовательского интерфейса.
На Фиг. 5 показан пример медицинского устройства 500. Субъект 502 показан как лежащий на опорной кушетке 504. Медицинское устройство 500 содержит систему 506 высокоинтенсивного фокусированного ультразвука. Система 506 высокоинтенсивного фокусированного ультразвука содержит заполненную флюидом камеру 508. Внутри заполненной флюидом камеры 508 находится ультразвуковой преобразователь 510. Хотя на этом чертеже и не показано, но ультразвуковой преобразователь 510 содержит множественные элементы ультразвукового преобразователя, каждый из которых пригоден для генерации отдельного ультразвукового пучка. Это может быть использовано для настройки на местоположение объема 522 соникации электронным образом, управляя фазой и/или амплитудой переменного электрического тока, подаваемого на каждый ультразвуковой преобразователь, или на группы элементов ультразвукового преобразователя. Точка 522 отображает регулируемый фокус медицинского устройства 500.
Ультразвуковой преобразователь 510 соединен с механизмом 512, который позволяет механически переустановить ультразвуковой преобразователь 510. Механизм 512 соединен с механическим приводом 514, который приспособлен для приведения в действие механизма 512. Механический привод 512 также отображает источник электропитания для подачи электроэнергии на ультразвуковой преобразователь 510. В некоторых вариантах реализации источник электропитания может управлять фазой и/или амплитудой электроэнергии для отдельных элементов ультразвукового преобразователя.
Ультразвуковой преобразователь 510 излучает ультразвук, который показан как следующий по траектории 516. Ультразвук 516 проходит через заполненную флюидом камеру 508 и через окно 518 для ультразвука. В этом варианте реализации, ультразвук затем проходит через гелевую подушку 520. Гелевая подушка 520 не обязательно присутствует во всех вариантах реализации, но в этом варианте реализации имеется рецесс в опорной кушетке 504 для приема гелевой подушки 520. Гелевая подушка 520 способствует передаче ультразвуковой мощности между преобразователем 510 и субъектом 502. После прохождения через гелевую подушку 520, ультразвук 516 проходит через область 517 ближнего поля субъекта 502 и затем фокусируется в объем 522 соникации или целевую зону.
Объем 522 соникации может быть перемещен с помощью комбинации механического позиционирования ультразвукового преобразователя 510 и электронного регулирования положения объема 522 соникации.
Компьютер 540 дополнительно содержит процессор 544, пользовательский интерфейс 546, компьютерное запоминающее устройство 548, и компьютерную память 550. Интерфейс 542 аппаратных средств дает возможность процессору 544 посылать и принимать команды и данные для управления функционированием медицинского устройства 500. Процессор 544 дополнительно связан с пользовательским интерфейсом 546, компьютерным запоминающим устройством 548, и компьютерной памятью 550.
Компьютерное запоминающее устройство 548 показано как содержащее данные 552 предшествующей соникации. Компьютерное запоминающее устройство 548 дополнительно показано как содержащее карту 554 тепловых свойств. Компьютерное запоминающее устройство 548 дополнительно показано как содержащее максимальную энергию карту 556 максимальной энергии. Компьютерное запоминающее устройство 548 также показано как содержащее выбор объема соникации.
Компьютерная память 550 показана как содержащая модуль 560 управления. Модуль управления содержит выполняемый компьютером код, который дает возможность процессору 544 управлять работой и функциями медицинского устройства 500. Компьютерная память 550 также показана как содержащая термоакустическую модель 562. Термоакустическая модель 562 содержит выполняемый компьютером код 544, который дает возможность процессору вычислять карту тепловых свойств из данных 552 предшествующей соникации, и карту 556 максимальной энергии из карты 554 тепловых свойств.
Пользовательский интерфейс 546 соединяется с устройством отображения, которое отображает графический пользовательский интерфейс 570. Графический пользовательский интерфейс 570 имеет несколько различающихся областей. Имеется область 572 графического отображения для отображения картирования и данных медицинского изображения, если они доступны. Имеется область отображения данных 574, где сообщения и данные могут быть отображены для оператора, и имеется также область 576 выбора инструментария. Область 576 выбора инструментария содержит инструментальные средства, которые позволяют оператору модифицировать интерфейс, чтобы ввести данные и/или выбирать объемы соникации для соникации. Область отображения данных, например, может отображать данные, относящиеся к выбранным объемам соникации. Например, она может отображать имеющуюся мощность, которая может быть использована для обработки ультразвуком выбранного объема соникации, максимальную энергию, которая может быть выделена в объеме соникации, и/или время охлаждения.
Область 572 графического отображения показывает графически результаты термоакустической модели 562. В этой области 572 имеется два выбранных объема соникации, первый объем 580 соникации и второй объем 582 соникации. Имеются контурные линии 586, которые представляют картирование, отображаемое в области 572 устройства отображения. Картирование 586 может представлять карту максимальной энергии, карту тепловых свойств, карту уровня энергии, температурную карту, карту уровней изменения температуры и карту времени охлаждения. Одно или более этих различных картирований может быть отображено. Они могут быть, например, отображены, используя контурные линии или другое графическое средство, например, цветные изображения. Если они отображаются, то они также могут быть отображены полупрозрачным или прозрачным образом, так, что может быть отображен более чем один слой. Например, и имеющаяся мощность, и время охлаждения могут быть отображены в одно и то же время. Например, если область в контуре, окружающем объем 582 соникации находится при более низкой максимальной энергии, чем объем 580 соникации, пользователь может первым выбрать для обработки ультразвуком объем 580 в некоторых случаях. Пунктирная линия 588 указывает дополнительный индикатор, который показывает доступную для соникации область.
На Фиг. 6 показан увеличенный участок из Фиг. 5. Показана система 506 высокоинтенсивного фокусированного ультразвука и участок субъекта 502. В этом примере точка соникации показана в двух различающихся местоположениях, 522 и 522'. Это две точки для соникаций, которые были выполнены последовательно и были изменены, используя изменение электронной фокусировки ультразвукового преобразователя 510. Пунктирные линии 516 показывают приблизительную траекторию ультразвука в пределах конуса, фокусируемого на объем 522 соникации. Пунктирные линии, отмеченные как 516', показывают конус приблизительного распространения ультразвука, фокусируемого в объем 522' соникации. Можно видеть, что эти две области ультразвука 516, 516' перекрываются в области 602. Область 602 перекрытия может нагреваться, когда оба объема 522, 522' соникации подвергаются обработке ультразвуком. Область 602 перекрытия может нагреваться больше, чем области, в которых ультразвук не перекрывается. Этот Чертеж иллюстрирует то, что преимущественным оказывается использование термоакустической модели для построения карты тепловых свойств, которая отображает изменения тепловых свойств субъекта 502 после того, как точки 522 и 522' были обработаны ультразвуком. Также, на Фиг. 6 отмечена область 517 ближнего поля между точками соникации 522, 522' и преобразователем 510, и также область 600 дальнего поля, которая находится за точками 522, 522' соникации.
На Фиг. 6 соникация двух объемов 522, 522' соникации достигается при использовании электронного регулирования. Область 602 перекрытия может также быть обусловлена механической переустановкой преобразователя 510. Пример, представленный на Фиг. 6, поэтому, показывает также и механическое позиционирование объемов 522, 522' соникации.
На Фиг. 7 показан дополнительный вариант реализации медицинского инструмента 700. Вариант реализации, показанный на Фиг. 7, подобен показанному на Фиг. 5, но только в данном случае имеются дополнительные программные компоненты. Компьютерное запоминающее устройство 548 показано как дополнительно содержащее карту уровня энергии. Компьютерное запоминающее устройство 548 также показано как дополнительно содержащее траекторию 704 ультразвукового пучка. Траектория 704 ультразвукового пучка является показательной для расчетной траектории пучка для ультразвукового преобразователя 510. Компьютерное запоминающее устройство 548 дополнительно показано как содержащее принятую энергию 706 соникации. Компьютерное запоминающее устройство 548 показано как дополнительно содержащее рассчитанную карту 708 времени охлаждения для области 578. Компьютерное запоминающее устройство 548 дополнительно показано как содержащее продолжительность 710 соникации, которая была принята. Компьютерное запоминающее устройство 548 дополнительно показано как содержащее карту 712 максимальной мощности. Компьютерное запоминающее устройство 548 дополнительно показано как содержащее команды 714 соникации для управления системой 506 высокоинтенсивного фокусированного ультразвука для обработки ультразвуком точек 580 и 582 соникации.
Компьютерная память 550 показана как дополнительно содержащая модуль 716 вычисления карты уровня энергии. Модуль 716 вычисления карты уровня энергии содержит компьютерный выполняемый код, который дает возможность процессору 544 вычислять карту 702 уровня энергии, используя данные 552 предшествующей соникации. Компьютерная память 550 дополнительно показана как содержащая модуль 718 предсказания траектории пучка. Модуль 718 предсказания траектории пучка содержит компьютерный выполняемый код, который дает возможность процессору 544 вычислять траекторию 704 ультразвукового пучка, которая используется при формировании пучка для оптимизации карты времени охлаждения, карты уровня энергии, карты максимальной мощности и карты максимальной энергии. Компьютерная память 550 показана как дополнительно содержащая модуль вычисления карты максимальной мощности.
Модуль 720 вычисления карты максимальной мощности содержит компьютерный выполняемый код, который дает возможность процессору 544 вычислять карту 712 максимальной мощности, используя продолжительность 710 соникации и карту 556 максимальной энергии. По существу продолжительность 710 соникации используется для выполнения преобразования от энергии к мощности. Компьютерная память 550 дополнительно показана как содержащая модуль 722 создания команды соникации. Модуль 722 создания команды соникации содержит компьютерный выполняемый код, который дает возможность процессору вычислять команды 714 соникации, необходимые для обработки ультразвуком выбранных объемов 580 и 582 соникации. В некоторых вариантах реализации может выполняться формирование пучка, и тогда модуль 718 предсказания траектории пучка также используется модулем 722.
На Фиг. 8 показан дополнительный пример медицинского устройства 800. Медицинское устройство 800 подобно медицинскому устройству 500, показанному на Фиг. 5, и устройству 700, показанному на Фиг. 7. В этом варианте реализации имеется система 802 магнитно-резонансной визуализации для сбора тепловых магнитно-резонансных данных. Система магнитно-резонансной визуализации содержит магнит 804. Магнит 804 представляет собой сверхпроводящий магнит цилиндрического типа с тоннелем 806, проходящим через его центр. В различных вариантах реализации механический привод/источник электропитания 514 располагается внутри или снаружи тоннеля 806 магнита 804.
Магнит имеет охлаждаемый жидким гелием криостат со сверхпроводящими катушками. Также возможно использовать постоянные или резистивные магниты. Использование магнитов других типов также возможно, например, также возможно использовать и расщепленный цилиндрический магнит, и так называемый открытый магнит. Расщепленный цилиндрический магнит подобен стандартному цилиндрическому магниту, за исключением того, что криостат расщепляется на две секции, чтобы позволить доступ к изопланарной плоскости магнита, такие магниты, могут, например, использоваться вместе с терапией пучком заряженных частиц. Открытый магнит имеет две секции магнита, одна выше другой, с промежутком между ними, который достаточно велик для возможности приема субъекта: расположение зоны между этими двумя секциями подобно таковому для катушки Гельмгольца. Открытые магниты популярны потому, что субъект оказывается в менее замкнутом пространстве. Внутри криостата цилиндрического магнита имеется сборка сверхпроводящих катушек. В пределах тоннеля 806 цилиндрического магнита имеется зона 808 визуализации, где магнитное поле имеет большую напряженность и является достаточно однородным для выполнения магнитно-резонансной визуализации.
В пределах тоннеля 806 магнита имеется также набор катушек 810 градиентного магнитного поля, которые используются для сбора магнитно-резонансных данных при пространственном кодировании магнитных спинов в пределах зоны 808 визуализации магнита 804. Катушки градиентного магнитного поля соединяются с источником 812 электропитания катушек градиента магнитного поля. Катушки 810 градиентного магнитного поля принципиально важны для визуализации. Обычно, катушки градиентного магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник 812 электропитания для градиентного магнитного поля подает ток на катушки 810 градиента магнитного поля. Подаваемый на катушки градиента магнитного поля ток управляется как функция времени и может быть линейно изменяющимся, или импульсным током.
Как смежная с зоной 808 визуализации, располагается радиочастотная катушка 814 для управления ориентациями магнитных спинов в пределах зоны 808 визуализации, и для приема радиочастотного отклика от спинов, также в пределах зоны визуализации. Радиочастотная катушка может содержать множественные элементы катушек. Радиочастотная катушка может также обозначаться как канал, или антенна. Радиочастотная катушка 814 соединяется с радиочастотным приемопередатчиком 816. Радиочастотная катушка 814 и радиочастотный приемопередатчик 816 могут быть заменены отдельными передающей и приемной катушками и отдельными передатчиком и приемником. Следует иметь в виду, что радиочастотная катушка 814 и радиочастотный приемопередатчик 816 являются принципиально важными. Радиочастотная катушка 814 одинаково служит и как передающая антенна, и как приемная антенна. Аналогично, приемопередатчик 816 может быть также представлен как отдельный передатчик и отдельный приемник.
Компьютерное запоминающее устройство 548 показано как содержащее импульсную последовательность 820. Импульсная последовательность в данном случае представляет собой последовательность команд, выполняемых в разное время, которые дают возможность системе 802 магнитно-резонансной визуализации собрать магнитно-резонансные данные 822. Компьютерное запоминающее устройство 548 показано как содержащее тепловые магнитно-резонансные данные 822, которые были собраны, используя магнитно-резонансную систему 802 визуализации. Компьютерное запоминающее устройство 548 также показано как содержащее карту 824 тепловых свойств, карту 826 уровня изменения температуры, и/или медицинское изображение 828, которое было восстановлено из магнитно-резонансных данных 822.
Компьютерная память 550 показана как содержащая модуль 830 реконструкции изображения. Модуль 830 реконструкции изображения содержит компьютерный исполняемый код, который дает возможность процессору 544 построить карту 824 тепловых свойств, карту 826 уровня изменения температуры, и/или медицинское изображение 828 из тепловых магнитно-резонансных данных 522.
Компьютерная память 550 также показана как содержащая модуль 832 коррекции термоакустической модели. Это дополнительный модуль 832, который может использовать карту 826 уровней изменения температуры для коррекции термоакустической модели 562.
Магнитно-резонансная система 802 визуализации может также использоваться для поддержки системы 506 высокоинтенсивного фокусированного ультразвука. Например, посредством нормальной магнитно-резонансной визуализации, система 802 магнитно-резонансной визуализации может быть использована для идентификации анатомических ориентиров внутри субъекта 502, чтобы идентифицировать местоположение точек 880, 882 соникации.
С возможностями терапии HIFU, имеется несколько факторов, которые влияют на эффективность обработки или безопасность. Эти факторы часто зависят от свойств ткани субъекта или от выбранных параметров обработки (соникации), и не известны пользователю во время обработки, или, по меньшей мере, неизвестно их пространственное распределение. Однако, система может измерить некоторые параметры, описывающие эти свойства. Если бы пространственная информация, или зависящая от ячейки обработки информация о таких параметрах была доступна во время выполнения процедуры обработки для пользователя, то она/он могла бы использовать данные для оптимизации обработки.
Варианты реализации могут действовать для визуализации одного или более из следующего:
- Времени охлаждения, зависящего от ячейки обработки, обозначенного для каждой запланированной ячейки.
- Любой параметризации, визуализируемой как карта, например, контуров или цветов, описывающих параметры обработки, свойства ткани или предсказание успеха или опасности будущих обработок. Это может быть, например:
- Карта уровня охлаждения/нагрева.
- Карта времени релаксации (например, Постоянная времени жира, измеренная из взвешенного изображения T2).
- Карта времени охлаждения для каждого типа ячейки.
- Карта номинальной мощности, или энергии, или карта максимальных размеров ячейки обработки.
- Карта плотности энергии или интенсивности.
- Номинальная область обработки, с учетом энергии, выделяемой в предварительно выполненных процедурах обработки.
- Объединенная визуализация температурных карт, полученных различными способами измерения.
Варианты реализации могут предоставить соответственную информацию, которая собирается от объекта во время использования, для пользователя, который управляет использованием. Пользователь может затем использовать информацию для оптимизации и регулировки в соответствии с данной информацией. Если информация не доступна для пользователя, результат лечебной обработки, эффективность или безопасность могут быть худшими, чем это могло быть при использовании изобретения.
В рамках HIFU обработки могут иметься области ткани, где недавно выполнялось несколько соникаций, и имеется значительное накопление тепла. Следует избежать дополнительной соникации таких областей, пока не пройдет достаточно времени и не станет безопасным снова обрабатывать их ультразвуком. Пользователь не знает точно, какие именно области следует обойти. Несколько объектов этого изобретения могут быть использованы для предоставления такой информации пользователю.
Варианты реализации могут быть действующими для параметризации информации, которую система собирает во время обработки, и визуализирует ее для пользователя в форме, которая дает возможность пользователю легко ее понять и использовать полученные данные в планировании обработки.
Варианты реализации могут действовать для сбора информации о свойствах ткани субъекта, о восстановлении из предшествующей истории обработки, о готовности для будущей процедуры обработки или о согласованных опциях для будущих процедур обработки. Варианты реализации могут действовать для визуализации информации для пользователя в форме, которая является простой для восприятия и полезной пользователю для оптимизации будущей обработки.
Скорость, с которой ткань охлаждается после процедуры нагрева, или нагревается во время процедуры нагрева, зависит, например, от типа ткани, ее васкуляризации, распространения тепла от других областей, и от окружающих тканей. Пользователь (и система) может сделать предположения о скорости охлаждения или нагрева для каждого типа ткани и использовать эти предположения для вычисления предсказаний для будущих процедур обработки. Однако, система может альтернативно определять фактическое температурное поведение в каждой ткани, если она измеряет температурные карты с достаточными интервалами. Определение может быть выполнено, например, подгонкой экспоненциальной функцией или подгонкой других подходящих функций к измеренным данным. Основываясь на таких картах, можно построить 2D или 3D карты падения температуры или уровня подогрева для каждой ткани. Карта уровня подогрева может учитывать энергию или интенсивность, попадающую на эту ткань во время обработки, чтобы создать более надежные карты. Система может затем визуализировать такие карты пользователю, например, с контурами или с цветами. Пользователь может затем использовать визуализируемую информацию для регистрации различия в ней, например, температуру охлаждения после HIFU соникации, и выбрать подходящие времена охлаждения для каждой ткани. Система может также автоматически использовать измеренные карты уровня охлаждения при вычислении времен охлаждения для запланированных будущих процедур обработки. Или, на основании визуализированной, измеренной карты уровня подогрева, пользователь может оценить, сколько энергии необходимо для выполнения обработки в каждом конкретном местоположении. Кроме того, система может использовать карты уровня подогрева, чтобы дать предложение о подходящих параметрах обработки для будущих процедур обработки.
Время охлаждения, которое рассматривается как достаточное до начала новой процедуры обработки (например, соникации с устройством HIFU), может зависеть от запланированной энергии будущей процедуры обработки, и хронологии прошлых процедур обработки, которые могли образовать накопление тепла в тканях по траектории пучка. Зависимость положения может быть вычислена и визуализирована для пользователя (например, с 2D или 3D контурами или цветами). Пользователь может использовать визуализацию для заключения о том, какие положения обработки являются согласованными для грядущей скорейшей обработки, и какие положения не должны все же обрабатываться некоторое время вследствие слишком большого накопления тепла по траектории пучка. Пользователь может тогда планировать новые процедуры обработки в области, которая обозначается как область с "коротким" временем охлаждения, тем самым, сокращая полную продолжительность обработки. Карты времени охлаждения также могут быть вычислены и визуализированы отдельно для обработок с различающимися энергиями, например на тип ячейки, чтобы позволить оптимизацию обработки с различными опциями по энергии.
Мощность, или энергия, номинальная, или рекомендуемая, для обработки может зависеть от положения обработки. Зависимость положения может быть обусловлена, например, накоплением тепла от предыдущих обработок, информацией, предоставляемой предыдущими соникациями относительно подходящей энергии, или мощности, требуемой для находящихся рядом положений обработки, или наличием чувствительных органов по траектории распространения энергии. Система может вычислить номинальный (если существуют строгие ограничения, например, для формирования пучка, чтобы избежать маркированных областей), или рекомендуемый (если нет строгих ограничений, но система имеет информацию о желательном неиспользовании слишком высокого уровня мощности или энергии по конкретной области) уровень мощности, или максимальный уровень мощности, или энергии, или максимальную энергию, используемую при обработке в области обработки, как 2D или 3D карта, и визуализируют это пользователю, например, контурами или цветами. Пользователь может использовать информацию для выбора подходящего уровня мощности, или энергии, или размера ячейки для каждой процедуры обработки. Система может также автоматически ограничивать номинальную мощность, или энергию, для процедуры обработки на основании рассчитанной карты и запланированного местоположения обработки.
Максимальный размер обрабатываемой ячейки, номинальный или рекомендуемый для обработки, может зависеть от положения обработки. Зависимость положения может быть обусловлена, например, накоплением тепла от предыдущих обработок, информацией, предоставляемой предыдущими соникациями относительно подходящей энергии, или мощности, требуемой для находящихся рядом положений обработки, наличием чувствительных органов по траектории распространения энергии, ограничениями пределов механического перемещения преобразователя, объединенными с номинальными пределами отклонения для каждого типа ячейки. Система может вычислить номинальный (если имеются строгие ограничения, например, для формирования пучка, чтобы избежать маркированные области), или рекомендуемый (если нет строгих ограничений, но система имеет информацию о желательном неиспользовании слишком больших размеров ячейки по некоторой области), максимальный размер ячейки для обработки, используемый в обработке обрабатываемой области, как 2D или 3D карта, и визуализировать это пользователю, например цветами или контурами. Пользователь может использовать информацию для выбора подходящего (или с наибольшей вероятностью успешного) размера обрабатываемой ячейки для каждой процедуры обработки.
Варианты реализации могут действовать для получения информации об областях, через которые энергия, или интенсивность, распространяется во время процедуры обработки. Система может оценивать плотность энергии по траектории пучка несколькими вариантами. Для HIFU обработки, это может быть получено, например, с термоакустическими моделированиями, или с некоторой более простой моделью, предполагая, например, коническое распределение энергии соникации и простым делением полной энергии на площадь конуса в исследуемой плоскости. Затухание в тканях, в которых распространяется энергия, при необходимости может быть учтено. Такие модели лучше всего работают в области ближнего поля, поскольку тогда ни (неизвестное) затухание ткани, ни фазовая когерентность, образуемая в фокальной области, не имеет большого влияния на распределение энергии. В области дальнего поля может быть использована предварительно вычисленная моделируемая энергия (ячейка) и зависящие от отклонения полевые модели. Они являются особенно подходящими для ячеек Sonalleve HIFU с обратной связью, где энергия в фокусе оказывается приблизительно той же самой для каждой соникации того же самого размера ячейки и осевого отклонения, и форма пучка в области дальнего поля может быть хорошо приближена предварительно моделируемой формой.
Эти способы вычисления плотности энергии всех прошлых процедур обработки могут быть объединены для построения карты плотности энергии всех предыдущих процедур обработки и их визуализации пользователю как 2D или 3D карта, например, контуров или цветов. Время, протекшее с момента каждой прошлой процедуры обработки может быть учтено, например, используя скользящее среднее число прошлых плотностей энергии/интенсивности, или предполагая, или измеряя, постоянную времени затухания для каждой ткани отдельно и используя ее это для энергии/интенсивности для каждой прошлой процедуры обработки.
Пользователь может затем сравнить пучок, или соответственную карту энергии или интенсивности запланированной процедуры обработки с картой плотности энергии или интенсивности от предыдущих процедур обработки, чтобы видеть, будет ли запланированная лечебная процедура вызывать приложение энергии в областях, которые уже приняли энергию, или интенсивность, и вероятно еще полностью не охладились.
Варианты реализации могут иметь программное обеспечение, действующее для визуализации имеющейся обрабатываемой области (ATA) для пользователя. Трехмерная ATA обычно не учитывает хронологию обработки. Система может регистрировать, какие области обработки приняли существенную энергию недавно, и указывают пользователю, какие фокальные области требуют пропускания энергии через области, для которых не безопасна соникация. ATA может тогда зависеть от времени, предоставляя больше областей для обработки, поскольку проходит время и ткани остывают.
Для объемных соникаций, время охлаждения может зависеть от размера ячейки. Большие ячейки требуют большей полной энергии, чем меньшие ячейки. Поэтому, они должны иметь более длительные времена ожидания между соникациями, чтобы позволить достаточное охлаждение ткани между соникациями. Кроме того, накопление дозы увеличивается сложным экспоненциальным образом с увеличением температуры; поэтому, времена охлаждения могут быть выбраны так, что начальная температура, остающаяся от предшествующей соникации перед началом соникации ячейки, оказывается меньшими с большими ячейками, и большими с меньшими ячейками. Время охлаждения может быть предсказано для каждой ячейки перед началом соникации. Некоторые ячейки (также как не объемные ячейки) могут также не иметь, или иметь минимальное перекрытие распределения энергии по траектории распространения энергии, с предварительно обработанными ультразвуком ячейками, тем самым, позволяя моментальную соникацию после предшествующей ячейки. Времена охлаждения могут тогда быть совершенно отличными для различающихся будущих ячеек, но пользователь не имеет информации о положении или зависимости от типа ячейки, если это не указано системой. Основной признак этого объекта новшества заключается в вычислении зависящих от ячейки времен охлаждения, и визуализации их пользователю. Этот объект изобретения может быть осуществлен, например, связывая и визуализируя время охлаждения с каждой ячейкой. Например, в списке ячеек, или в изображении с запланированными ячейками, время охлаждения может быть видимым близким к визуализации или другому отображению ячейки.
Один пример использования некоторых вариантов реализации заключается в формировании пучка с использованием HIFU. Алгоритм формирования пучка может учитывать фактическую мощность соникации, и определять, какие именно элементы преобразователя переключить или снизить интенсивность так, чтобы не был превышен допустимый уровень интенсивности, или энергии, при экспонировании органа. С подходом этого изобретения, система может вычислить (до соникации) карту (2D или 3D), указывая, какая максимальная энергия или мощность могут быть использованы в каждой фокальной позиции, так, чтобы пределы недопустимой интенсивности или энергии для областей органа не были превышены, и другой набор условий для использования формирования пучка был выполнен (например, максимальное число выключенных элементов). Без такой карты, пользователь при перспективном планировании не имеет информации о том, какую мощность он, или она, может использовать, в данной части области обработки, и о том, что некоторая часть области обработки имеет слишком малые допустимые мощности, или энергии, настолько, что клинически успешный результат обработки окажется маловероятным.
Другой пример использования некоторыми вариантами реализации с какой-либо обработкой HIFU, предложение подходящей энергии, или интенсивности, для соникации. Потребность энергии в определенном местоположении обработки можно ожидать близкой к потребности энергии в местоположении, которое является близким к данному местоположению, поскольку подобные ткани обычно нуждаются в подобных же энергиях для абляции, даже при том, что некоторая вариативность существует, например, из-за различий в тканях по траектории пучка. Более далекие ткани могут также иметь различную васкулиризацию и другие свойства, приводя к необходимости в различной энергии для абляции. Более глубоко лежащие ткани обычно требуют более высоких энергий для абляции, чем ткани, находящиеся ближе к коже, поскольку затухание в тканях между фокусом и преобразователем уменьшает энергию, достигающую фокальной области. Программное обеспечение может исследовать энергии, или интенсивности, использованные с предыдущими успешными соникациями, которые были выполнены достаточно близко к запланированному местоположению обработки, например, беря взвешенное (вероятное) среднее значение энергий этих соникаций, и определяя вероятный "успешный" уровень мощности или энергии для следующей соникации, при каждом согласованном местоположении соникации, и создавая (2D или 3D) карту "рекомендуемой" мощности. Это может быть определено отдельно для различающихся размеров ячейки. Если только глубинная зависимость необходимой энергии или мощности рассматривается, то рекомендованная мощность может альтернативно быть получена просто предполагая некоторое предварительно заданное затухание alfa для рассматриваемой ткани, то есть мощность соникации, или энергия E, будет зависеть только от глубины соникации в соответствии с законом E = Eref *exp(2*alfa * (Глубина- Глубинаref)). Модель может требовать эталонную энергию Eref при эталонной глубине Глубинаref. Это может быть получено, например, при использовании среднего значения (по некоторой совокупности субъектов) необходимой энергии при некоторой глубине соникации, или при использовании некоторых (или нескольких) прошлых соникаций в пределах текущей обработки. Эта информация, полученная в каком-либо упомянутом способе, может быть визуализирована как (2D или 3D) карта рекомендованной мощности в виде цветов или контуров.
Различные объекты изобретения могут быть применены к любой методике визуализации, которая имеет возможность производить температурные карты с достаточно высокой скоростью, чтобы использовать способы. Например, методика MR направляемой HIFU обработки. Некоторые объекты изобретения могут быть использованы также в более широком контексте, например, для визуализации имеющейся области обработки и/или визуализации зависящего от ячейки времени охлаждения.
Варианты реализации могут действовать для визуализации имеющейся области обработки. Это может также быть применено к любой методике, которая визуализирует (2D или 3D) имеющуюся область для обработки, или к любому другому действию, чтобы учесть предыдущую хронологию обработки или любое другое действие, и чтобы модифицировать визуализируемую имеющуюся область для указания того, каких областей следует избежать для дополнительной обработки или другого действия, пока некоторые условия, установленные для начала обработки или другого действия, не будут выполнены.
Варианты реализации могут действовать для применения к другим методикам, требующим времени охлаждения, или другого времени ожидания между лечебными процедурами или другими действиями, когда длительность необходимого времени ожидания зависит от хронологии предшествующей обработки или другого действия. Соответствующее время ожидания может быть вычислено для каждой запланированной будущей процедуры обработки или другого действия, и может быть визуализировано или указано пользователю, чтобы иметь возможность оптимизации порядка обработки или действия.
Хотя изобретение было показано на чертежах и подробно описано в вышеприведенном описании, такую иллюстрацию и описание следует считать иллюстративными, или примерными, а не ограничительными; изобретение не ограничивается раскрытыми вариантами реализации.
Другие вариации раскрытых вариантов реализации могут быть поняты и произведены специалистами в данной области техники при осуществлении сформулированного изобретения, из исследования чертежей, раскрытия, и приложенной формулы. В пунктах формулы изобретения выражение "содержащий" не исключает другие элементы или этапы, и выражение в единственном числе не исключает множества. Единственный процессор или другой модуль могут выполнять функции нескольких элементов, упоминаемых в пунктах формулы изобретения. Простой факт, что некоторые положения приведены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих положений не может быть использована для получения преимущества. Компьютерная программа может быть сохранена/распределена на подходящей среде, такой как оптический носитель данных или полупроводниковый носитель, поставляемые вместе или как часть других аппаратных средств, но также может быть распределена в других формах, например, через Интернет, или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные обозначения в пунктах формулы изобретения не должны быть рассмотрены как ограничение объема притязаний изобретения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
500 медицинский инструмент
502 субъект
504 опора субъекта
506 система высокоинтенсивного фокусированного ультразвука
508 заполненная флюидом камера
510 ультразвуковой преобразователь
512 механизм
514 механический привод/источник электропитания
516 траектория ультразвука
517 область ближнего поля
518 ультразвуковое окно
520 гелевая подушка
522 объем соникации
540 компьютерная система
542 интерфейс аппаратных средств
544 процессор
546 пользовательский интерфейс
548 компьютерное запоминающее устройство
550 компьютерная память
552 данных предшествующей соникации
554 карта тепловых свойств
556 карта максимальной энергии
558 выбор объема соникации
560 модуль управления
562 термоакустическая модель
570 пользовательский интерфейс
572 область графического отображения
574 область отображения данных
576 область выбора инструмента
578 область соникации
580 первый объем соникации
582 второй объем соникации
584 доступная область соникации
586 контурная линия
588 доступная область соникации
600 область дальнего поля
602 область перекрытия
700 медицинский инструмент
702 карта уровня энергии
704 траектория ультразвукового пучка
706 энергия соникации
708 карта времени охлаждения
710 продолжительность соникации
712 карта максимальной мощности
714 команды соникации
716 модуль вычисления карты уровней энергии
718 модуль предсказания траектории пучка
720 модуль вычисления карты максимальной мощности
722 модуль создания команд соникации
800 медицинское устройство
802 система магнитно-резонансной визуализации
804 магнит
806 тоннель магнита
808 зона отображения
810 катушки градиента магнитного поля
812 источник электропитания катушек градиента магнитного поля
814 радиочастотная катушка
816 приемопередатчик
820 последовательность импульсов
822 тепловые магнитно-резонансные данные
824 карта тепловых свойств
826 карта скорости изменения температуры
828 медицинское изображение
830 модуль реконструкции изображения
832 модуль коррекции термоакустической модели

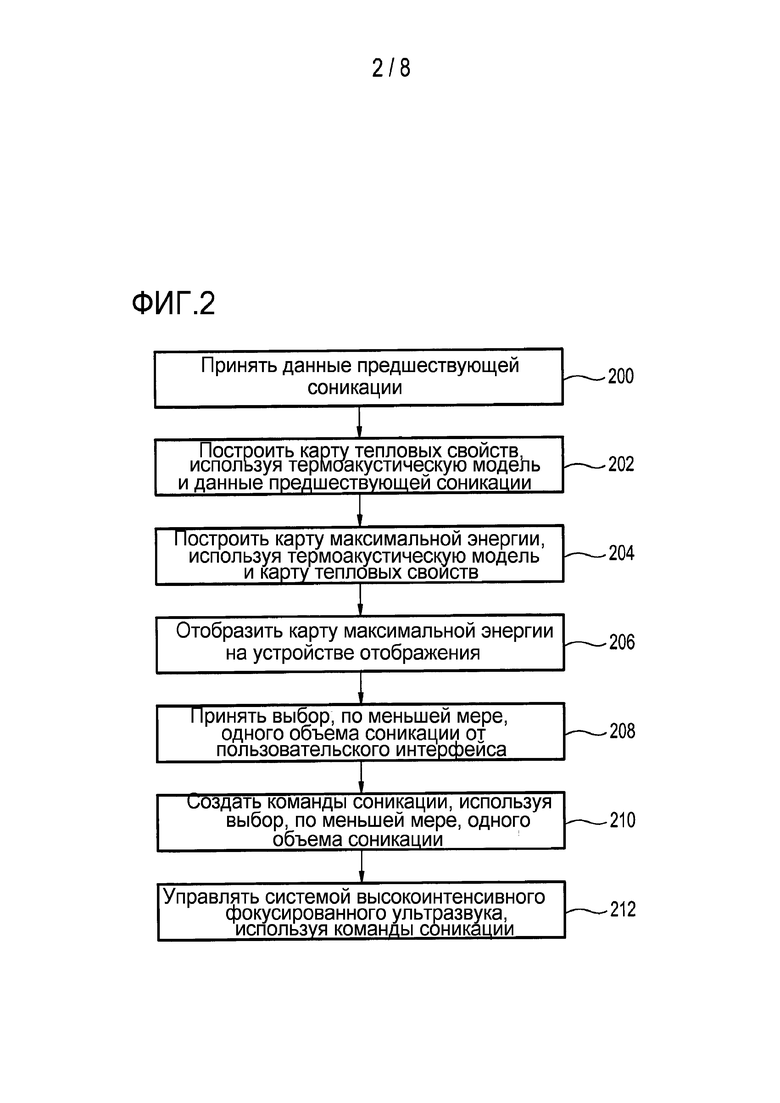






Группа изобретений относится к медицинской технике, а именно к средствам определения максимальной энергии обработки ультразвуком. Медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука для соникации субъекта, процессор для управления медицинским устройством, память для хранения машиноисполняемых команд, причем выполнение команд побуждает процессор принимать данные предшествующей соникации, характеризующие предшествующую соникацию субъекта системой высокоинтенсивного фокусированного ультразвука, строить карту тепловых свойств субъекта, используя данные предшествующей соникации и термоакустическую модель, причем карта тепловых свойств характеризует тепловые свойства и является пространственно-зависимой и зависимой от времени, определять карту максимальной энергии, используя термоакустическую модель и карту тепловых свойств, причем максимальная энергия является зависимой от времени, отображать карту максимальной энергии на устройстве отображения и принимать выбор по меньшей мере одного объема соникации от пользовательского интерфейса. Устройство снабжено машиночитаемым носителем данных и осуществляет способ функционирования медицинского устройства для определения максимальной энергии соникации. Использование изобретений позволяет точно определять максимальную энергию обработки ультразвуком. 3 н. и 12 з.п. ф-лы, 8 ил. 
1. Медицинское устройство для определения максимальной энергии соникации, содержащее:
систему высокоинтенсивного фокусированного ультразвука для соникации субъекта,
- процессор для управления медицинским устройством,
- память для хранения машиноисполняемых команд для выполнения их процессором, причем выполнение команд побуждает процессор:
- принимать данные предшествующей соникации, характеризующие предшествующую соникацию субъекта системой высокоинтенсивного фокусированного ультразвука;
- строить карту тепловых свойств субъекта, используя данные предшествующей соникации и термоакустическую модель, причем карта тепловых свойств характеризует тепловые свойства, причем карта тепловых свойств является пространственно-зависимой и зависимой от времени;
- определять карту максимальной энергии, используя термоакустическую модель и карту тепловых свойств, причем максимальная энергия является зависимой от времени;
- отображать карту максимальной энергии на устройстве отображения; и
- принимать выбор по меньшей мере одного объема соникации от пользовательского интерфейса.
2. Медицинское устройство по п.1, в котором система высокоинтенсивного фокусированного ультразвука содержит ультразвуковой преобразователь, выполненный с возможностью фокусировки ультразвука в объем соникации; причем термоакустическая модель выполнена с возможностью определения карты тепловых свойств в области соникации субъекта, причем термоакустическая модель выполнена с возможностью определения предсказанной карты тепловых свойств в области соникации, используя предсказанную геометрию ультразвукового пучка и карту тепловых свойств; причем предсказанная карта тепловых свойств характеризует тепловые свойства, причем предсказанная карта тепловых свойств является пространственно-зависимой, причем термоакустическая модель выполнена с возможностью определения максимальной мощности для каждого объема соникации, ограничивая максимум тепловых свойств в предсказываемой тепловой карте свойств до заданного максимального значения.
3. Медицинское устройство по п.2, в котором выполнение команд побуждает процессор:
- рассчитывать карту уровня энергии, используя геометрию пучка, максимальную мощность и термоакустическую модель; и
- отображать карту уровня энергии на устройстве отображения.
4. Медицинское устройство по п.2, в котором ультразвуковой преобразователь содержит множество элементов ультразвукового преобразователя, причем множество элементов ультразвукового преобразователя управляемы, причем множество элементов ультразвукового преобразователя выполнены с возможностью регулировки траектории ультразвукового пучка между ультразвуковым преобразователем и объемом соникации, причем предсказанная геометрия ультразвукового пучка характеризует траекторию ультразвукового пучка, причем термоакустическая модель дополнительно выполнена с возможностью определения предсказанной карты тепловых свойств, вычисляя корректировки геометрии ультразвукового пучка с использованием модели траектории пучка ультразвукового преобразователя.
5. Медицинское устройство по п.2, причем медицинское устройство дополнительно содержит привод ультразвукового преобразователя для перемещения ультразвукового преобразователя, причем привод ультразвукового преобразователя определяет местоположение преобразователя, причем выполнение команд дополнительно побуждает процессор определять предсказанную карту тепловых свойств, вычисляя корректировки местоположения преобразователя и используя модель поступательного перемещения ультразвукового преобразователя.
6. Медицинское устройство по п.2, причем медицинское устройство дополнительно содержит систему магнитно-резонансной визуализации для сбора магнитно-резонансных тепловых данных из зоны визуализации, причем область соникации находится в пределах зоны визуализации, причем выполнение команд дополнительно побуждает процессор:
- многократно собирать магнитно-резонансные тепловые данные из области соникации; и
- восстанавливать карту уровней изменения температуры, используя многократно собираемые магнитно-резонансные тепловые данные.
7. Медицинское устройство по п.6, в котором выполнение команд побуждает процессор отображать карту уровней изменения температуры на устройстве отображения.
8. Медицинское устройство по п.6, в котором выполнение команд побуждает процессор модифицировать термоакустическую модель, используя карту уровней изменения температуры.
9. Медицинское устройство по п.1, в котором выполнение команд дополнительно побуждает процессор:
- принимать энергию соникации;
- определять карту времени охлаждения, используя энергию соникации и термоакустическую модель, причем время охлаждения пространственно характеризует, когда выбранный объем соникации может быть обработан ультразвуком с энергией соникации, причем карта охлаждения является зависимой от времени; и
- отображать карту времени охлаждения на устройстве отображения, причем карта времени охлаждения отображается на пользовательском интерфейсе до того, как выбор по меньшей мере одного объема соникации будет принят от пользовательского интерфейса.
10. Медицинское устройство по п.1, в котором выполнение команд дополнительно побуждает процессор принимать продолжительность соникации и причем карта максимальной энергии выражается как карта максимальной мощности.
11. Медицинское устройство по п.10, в котором выполнение команд побуждает процессор:
- создавать команды соникации, используя выбор по меньшей мере одного объема соникации; и
- управлять системой высокоинтенсивного фокусированного ультразвука для обработки ультразвуком по меньшей мере одного объема соникации, используя команды соникации.
12. Медицинское устройство по п.11, в котором выполнение команд дополнительно побуждает процессор:
- определять обновленную карту максимальной мощности, используя карту тепловых свойств, команды соникации и термоакустическую модель, причем обновленная карта максимальной энергии является зависимой от времени;
- отображать обновленную карту энергии на устройстве отображения; и
- принимать обновленный выбор по меньшей мере одного объема соникации от пользовательского интерфейса.
13. Медицинское устройство по п.1, в котором тепловое свойство является любым одним из следующего: температура, тепловая доза и плотность энергии.
14. Машиночитаемый носитель данных, на котором сохранены машиноисполняемые команды, которые при выполнении процессором, управляющим медицинским устройством, содержащим систему высокоинтенсивного фокусированного ультразвука для соникации субъекта, побуждают процессор:
- принимать данные предшествующей соникации, характеризующие предшествующую соникацию субъекта системой высокоинтенсивного фокусированного ультразвука;
- строить карту тепловых свойств субъекта, используя данные предшествующей соникации и термоакустическую модель, причем карта тепловых свойств характеризует тепловые свойства, причем карта тепловых свойств является пространственно-зависимой и зависимой от времени;
- определять карту максимальной энергии, используя термоакустическую модель, причем максимальная энергия является зависимой от времени;
- отображать карту максимальной энергии на устройстве отображения; и
- принимать выбор по меньшей мере одного объема соникации от пользовательского интерфейса.
15. Способ функционирования медицинского устройства для определения максимальной энергии соникации, причем медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука для соникации субъекта, причем способ содержит этапы:
- приема данных предшествующей соникации, характеризующих предшествующую соникацию субъекта системой высокоинтенсивного фокусированного ультразвука;
- построения карты тепловых свойств для субъекта, используя данные предшествующей соникации и термоакустическую модель, причем карта тепловых свойств характеризует тепловые свойства, причем карта тепловых свойств является пространственно-зависимой и зависимой от времени;
- определения карты максимальной энергии, используя термоакустическую модель, причем максимальная энергия является зависимой от времени;
- отображения карты максимальной энергии на устройстве отображения; и
- приема выбора по меньшей мере одного объема соникации от пользовательского интерфейса.
| WO 2012029479 A1, 18.03.2010 | |||
| WO 2007047247 A1, 26.04.2007 | |||
| WO 2010102128 A1, 10.09.2010 | |||
| US 2011313329 A1, 22.12.2011 | |||
| US 2012245494 A1, 27.09.2012. |

