ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к системам и к подсистемам для обработки живой рыбы. Более конкретно, настоящее изобретение относится к подсистемам, использующим один или более роботизированных модулей для автоматической обработки живой рыбы, и к связанным с ней способам.
УРОВЕНЬ ТЕХНИКИ
Вакцинацию живой рыбы выполняют полностью вручную или с использованием полуавтоматических или полностью автоматических машин. Операторы вводят вакцину в каждую отдельную рыбу с помощью шприца для вакцинации или подают рыбу в полуавтоматическую машину для вакцинации в заданной ориентации. В полностью автоматических машинах рыба должна быть отсортирована и ориентирована выше по потоку от автоматизированного устройства вакцинации так, чтобы брюшная часть рыбы была доступной для прицельной инъекции. К сожалению, существующие в настоящее время подсистемы ориентирования, располагаемые выше по потоку, оказывают физическое воздействие на рыбу, а также занимают большую площадь в рыбном питомнике.
Таким образом, существует потребность в создании системы обработки рыбы, которая позволит не использовать указанные ориентирующие подсистемы, чтобы сократить физическое воздействие, оказываемое на живую рыбу, и при этом уменьшить общую площадь, занимаемую системой обработки рыбы. Кроме того, есть потребность в создании соответствующих способов для улучшенной обработки живой рыбы в питомнике и выполнения с ней различных операций.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеизложенные и другие потребности учтены в аспектах настоящего изобретения. Согласно первому аспекту предложен блок обработки рыбы, содержащий систему обследования, выполненную с возможностью обследования живой рыбы. Транспортерный узел выполнен с возможностью транспортировки живой рыбы к системе обследования. Блок обработки рыбы содержит по меньшей мере один роботизированный модуль, содержащий контроллер, выполненный с возможностью управления работой указанного модуля и соединенный с системой обследования. С роботизированным модулем функционально соединен концевой исполнительный элемент. Концевой исполнительный элемент выполнен с возможностью взаимодействия с живой рыбой, перемещающейся вдоль транспортерного узла, на основании информации, определяемой системой обследования и принимаемой контроллером.
Согласно другому аспекту предложен способ обработки живой рыбы. Данный способ включает усыпление живой рыбы. Живую рыбу транспортируют к системе обследования. С помощью системы обследования живую рыбу обследуют для определения информации о каждой рыбе. Информацию об обследованной рыбе передают в роботизированный модуль, содержащий функционально соединенный с ним концевой исполнительный элемент, выполненный с возможностью взаимодействия с живой рыбой во время ее транспортировки. С помощью концевого элемента выполняют обработку живой рыбы.
Согласно еще одному аспекту предложена система обследования, предназначенная для обследования живой рыбы. Транспортерный узел поделен на сегменты с обеспечением зазора между ними. Первое средство захвата изображения расположено на оной стороне транспортерного узла и выполнено с возможностью оптического сканирования первой стороны живой рыбы во время ее транспортировки вдоль транспортерного узла. Второе средство захвата изображения расположено на противоположной стороне транспортерного узла относительно указанного первого средства. Второе средство захвата изображения расположено вблизи указанного зазора и выполнено с возможностью захвата через указанный зазор изображений второй стороны живой рыбы, противоположной первой стороне, во время транспортировки живой рыбы вдоль транспортерного узла. Процессор выполнен с возможностью создания визуального отображения второй стороны живой рыбы, используя изображения, захваченные указанным вторым средством.
Таким образом, различные аспекты настоящего изобретения обеспечивают преимущества, как подробно изложено в данном документе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
После общего описания различных вариантов выполнения настоящего изобретения далее приведено описание сопроводительных чертежей, которые не обязательно выполнены в масштабе.
На чертежах:
Фиг. 1 схематично изображает в аксонометрии систему обработки рыбы согласно различным аспектам данного изобретения;
Фиг. 2 схематично изображает частичный вид в аксонометрии системы обработки рыбы, содержащей блок обследования рыбы, согласно одному аспекту данного изобретения;
Фиг. 3 схематично изображает частичный вид в аксонометрии системы обработки рыбы, содержащей блок обработки рыбы, согласно одному аспекту данного изобретения;
Фиг. 4 схематично изображает в аксонометрии блок обработки рыбы, содержащий роботизированный модуль, выполненный с возможностью взаимодействия с живой рыбой, транспортируемой на транспортере, согласно одному аспекту данного изобретения;
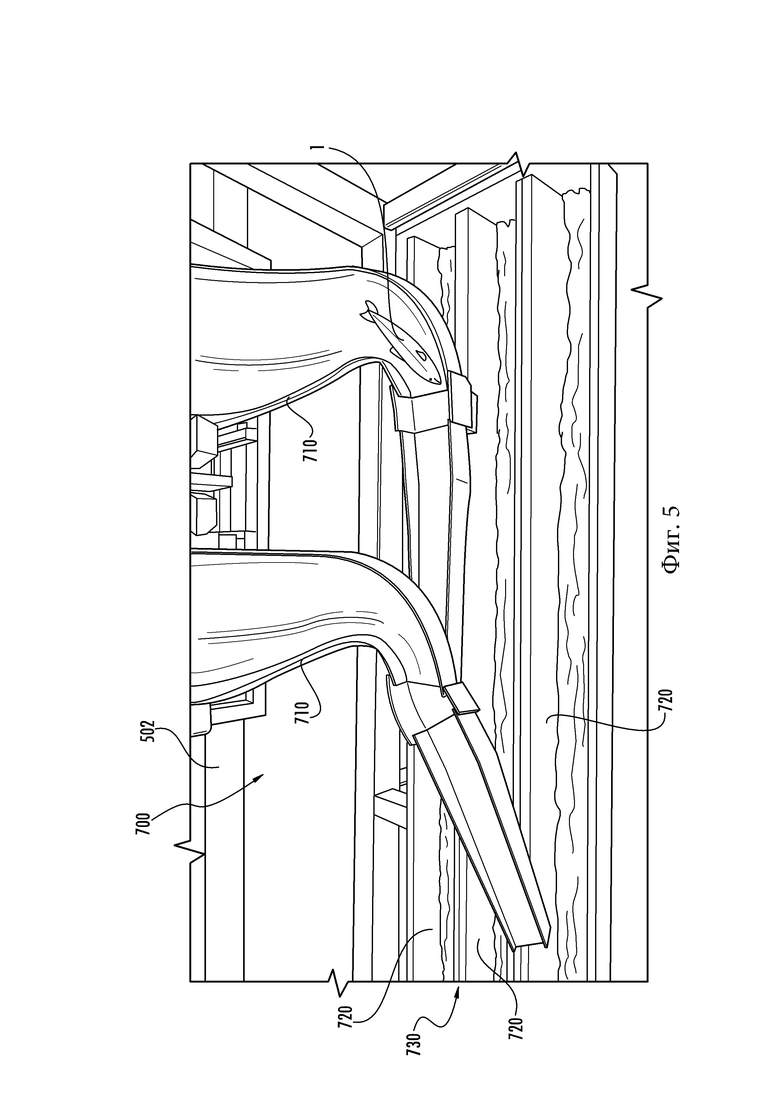
Фиг. 5 схематично изображает в аксонометрии сортировочный блок, предназначенный для сортировки рыбы после вакцинации в соответствии с заданными параметрами, согласно одному аспекту данного изобретения;
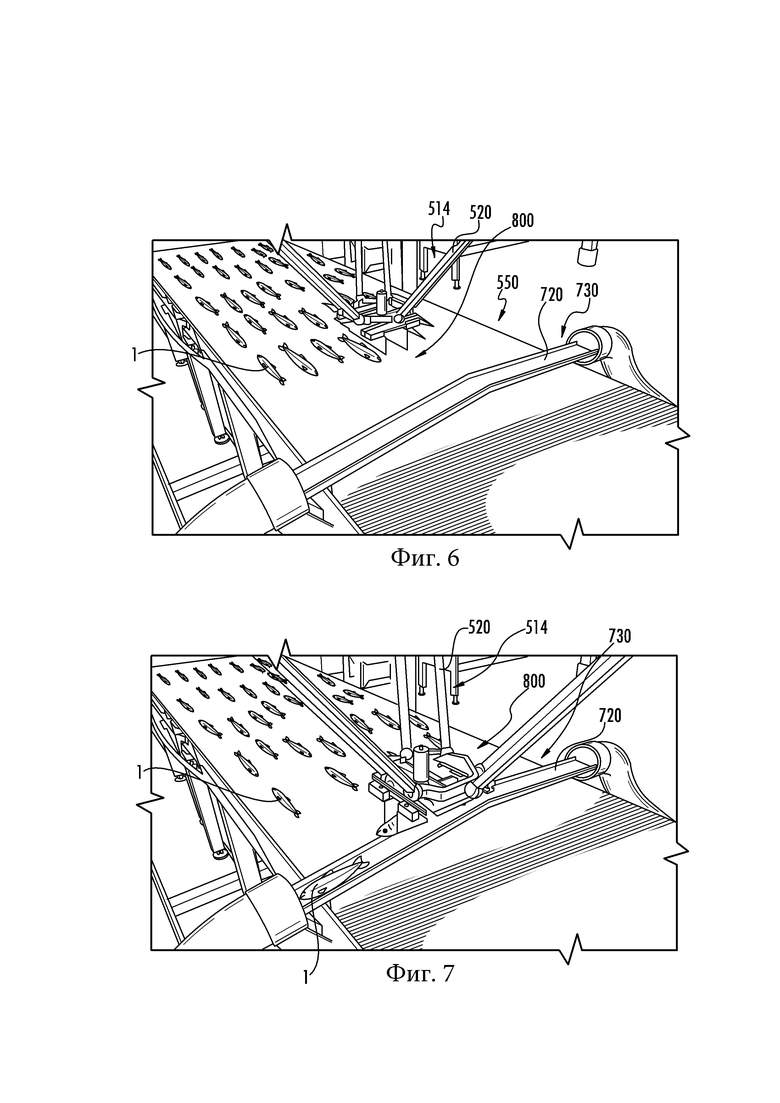
Фиг. 6 схематично изображает в аксонометрии блок обработки рыбы, содержащий роботизированный модуль с концевым исполнительным элементом, выполненным с возможностью захвата живой рыбы, ориентированной в любом направлении, согласно одному аспекту данного изобретения;
Фиг. 7 схематично изображает в аксонометрии блок обработки рыбы, содержащий роботизированный модуль с концевым исполнительным элементом, выполненным с возможностью поворота живой рыбы после ее подъема с транспортера, согласно одному аспекту данного изобретения;
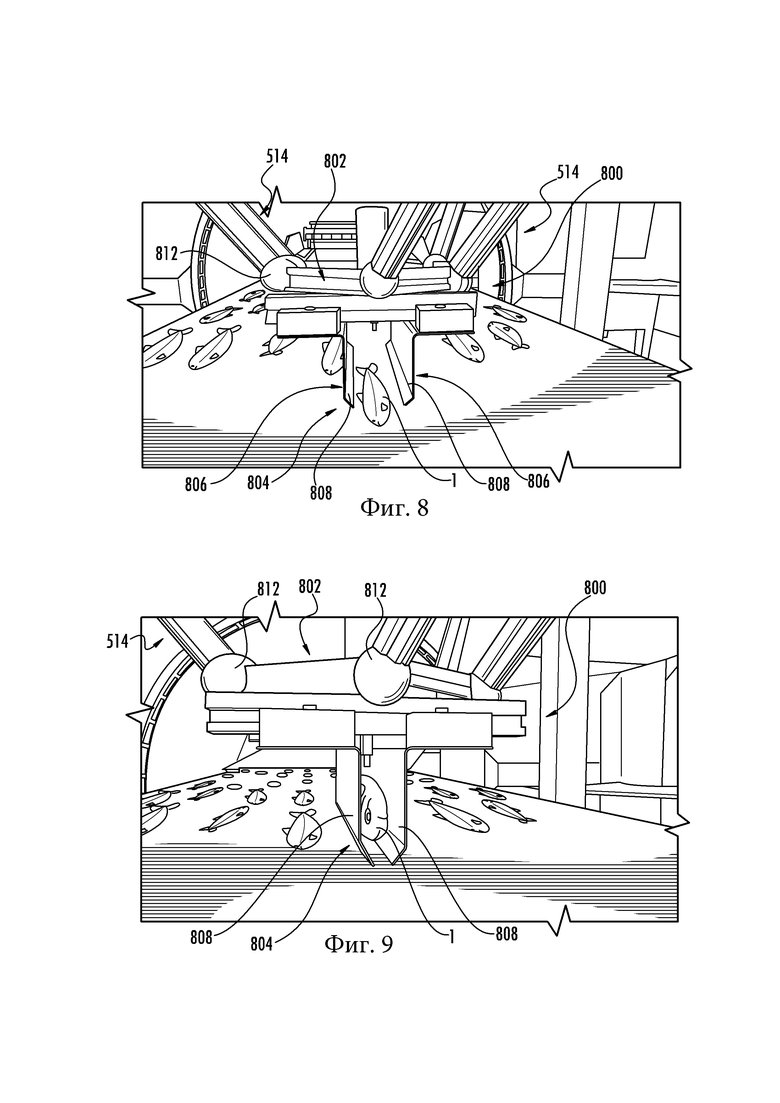
Фиг. 8 и 9 схематично изображают виды в аксонометрии, иллюстрирующие последовательность, в которой с помощью роботизированного модуля с концевым исполнительным элементом захватывают живую рыбу с транспортера, согласно одному аспекту данного изобретения;
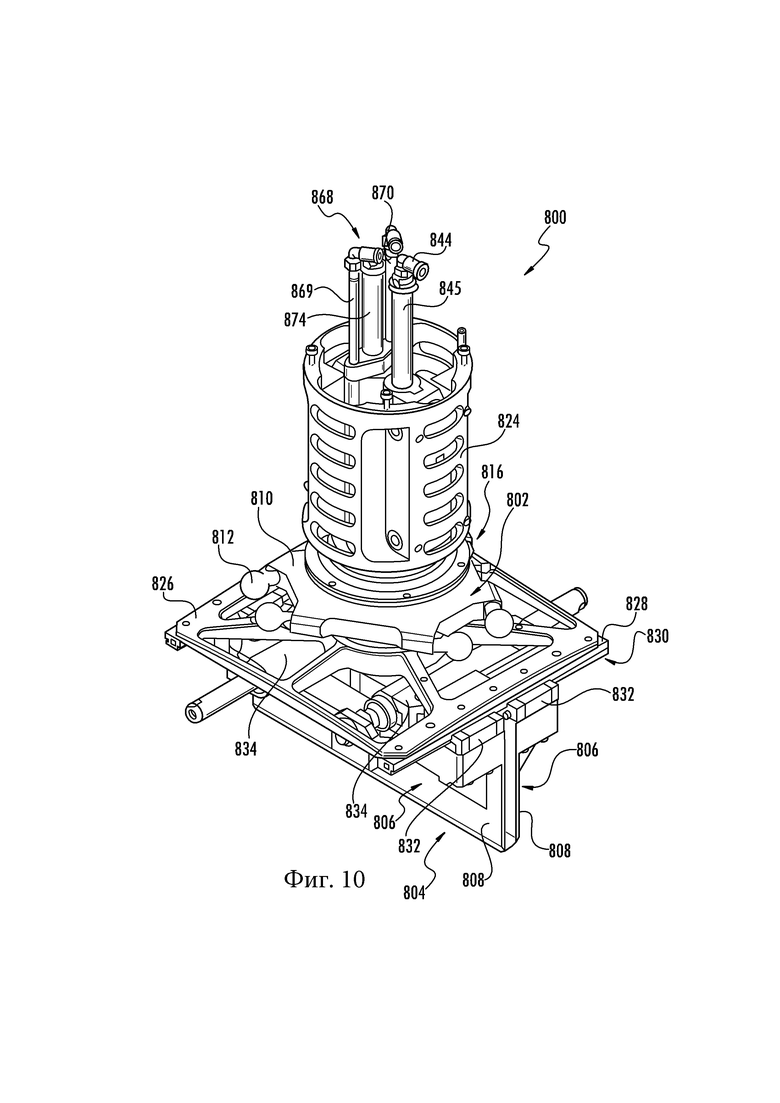
Фиг. 10 схематично изображает вид в аксонометрии концевого исполнительного элемента для применения в роботизированном модуле, при этом концевой элемент выполнен с возможностью захвата и вакцинации живой рыбы, согласно одному аспекту данного изобретения;
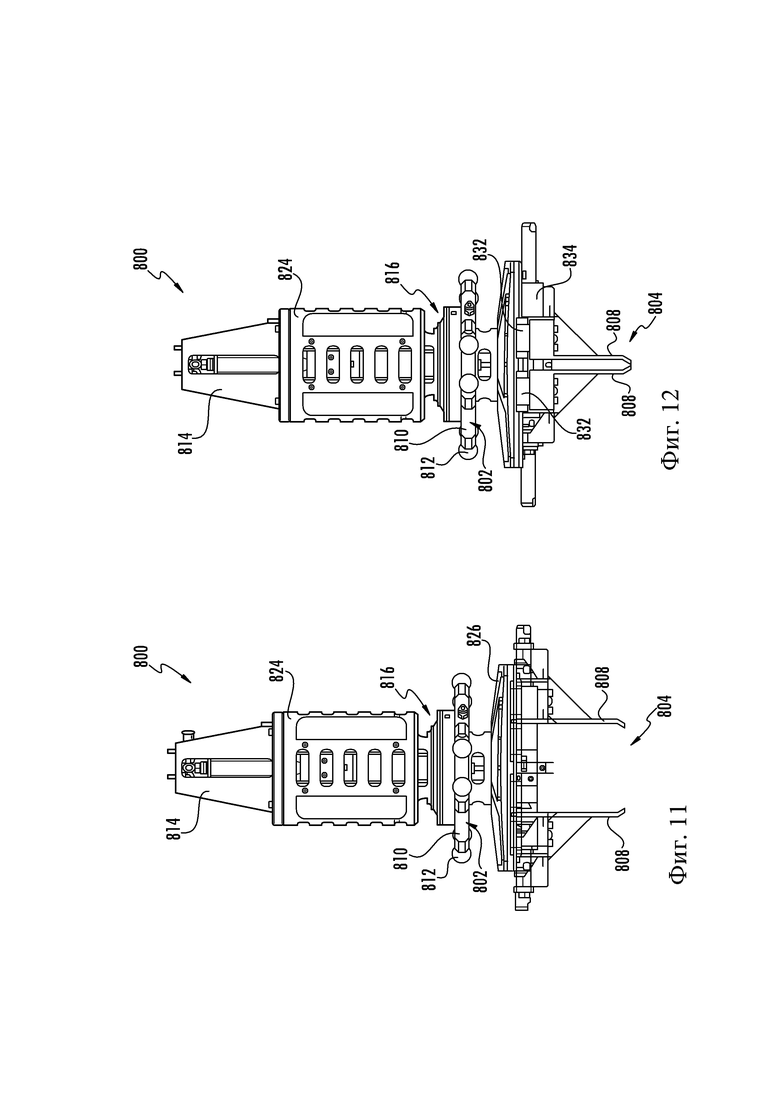
Фиг. 11 схематично изображает вид спереди концевого исполнительного элемента, показанного на Фиг. 10, иллюстрирующий захватный узел в полностью открытом положении;
Фиг. 12 схематично изображает вид спереди концевого исполнительного элемента, показанного на Фиг. 10, иллюстрирующий захватный узел в полностью закрытом положении;
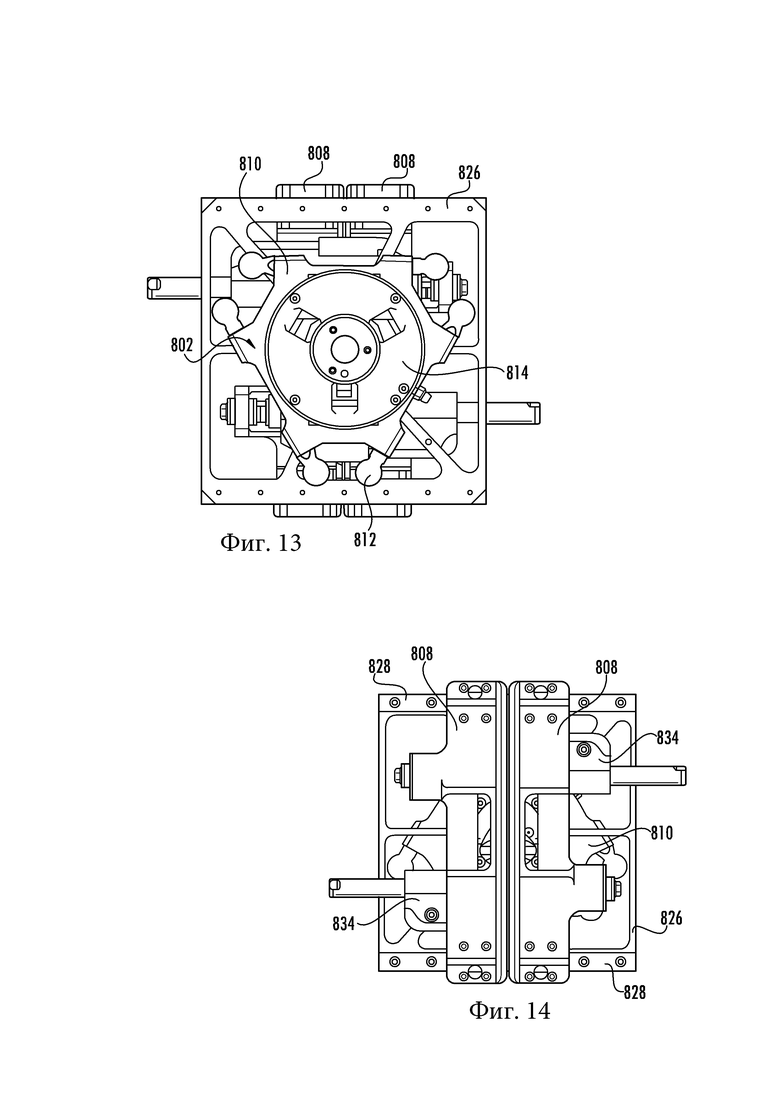
Фиг. 13 схематично изображает вид сверху концевого исполнительного элемента, показанного на Фиг. 10;
Фиг. 14 схематично изображает вид снизу концевого исполнительного элемента, показанного на Фиг. 10, с захватным узлом в полностью закрытом положении;
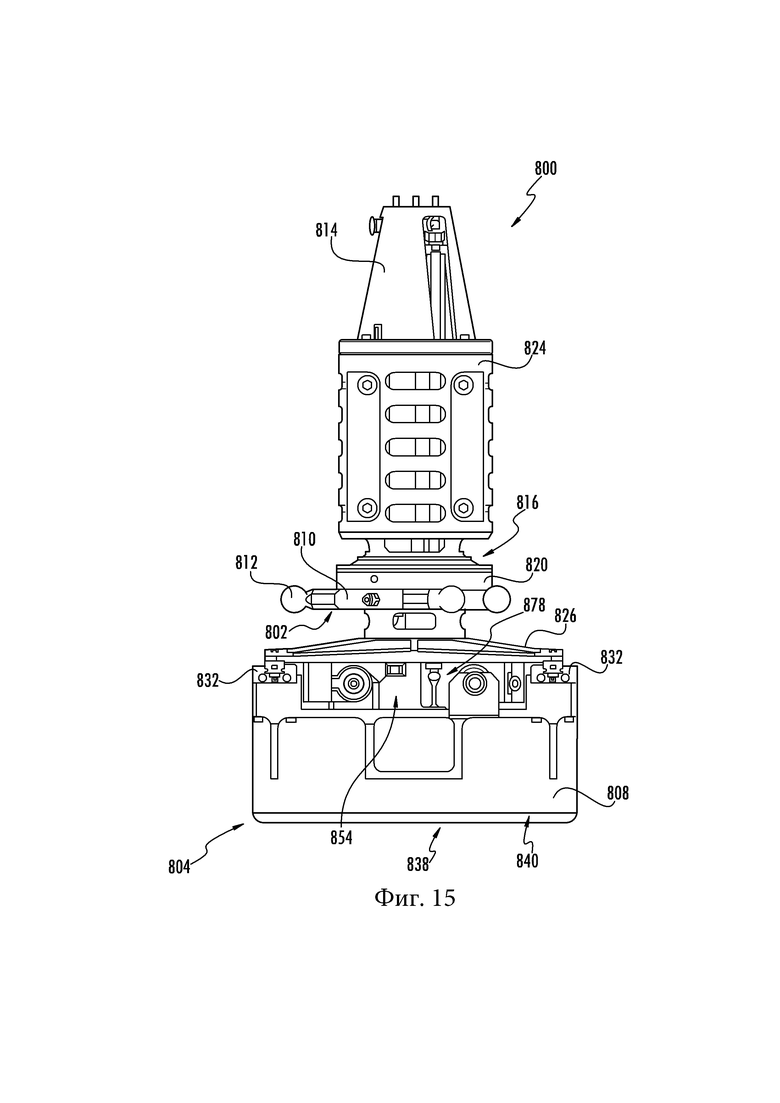
Фиг. 15 схематично изображает вид сбоку концевого исполнительного элемента, показанного на Фиг. 10;
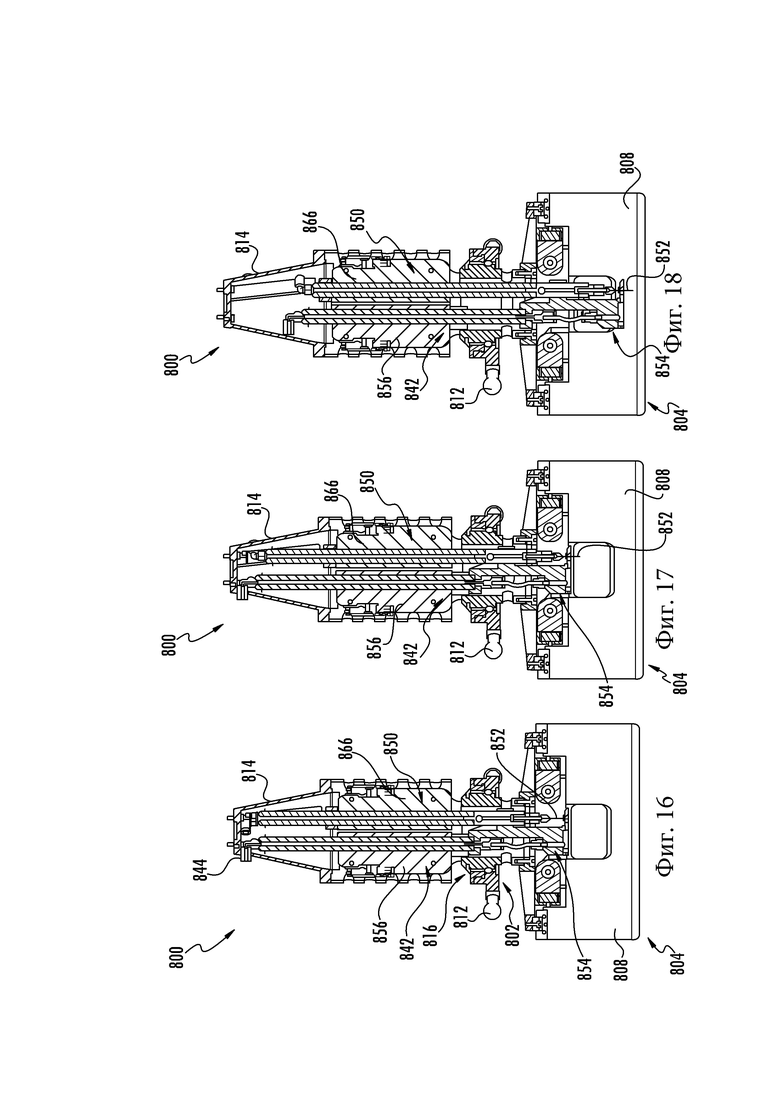
Фиг. 16-18 изображают виды сбоку в разрезе концевого исполнительного элемента, показанного на Фиг. 10, иллюстрирующие узел толкателя и иглы в различных положениях;
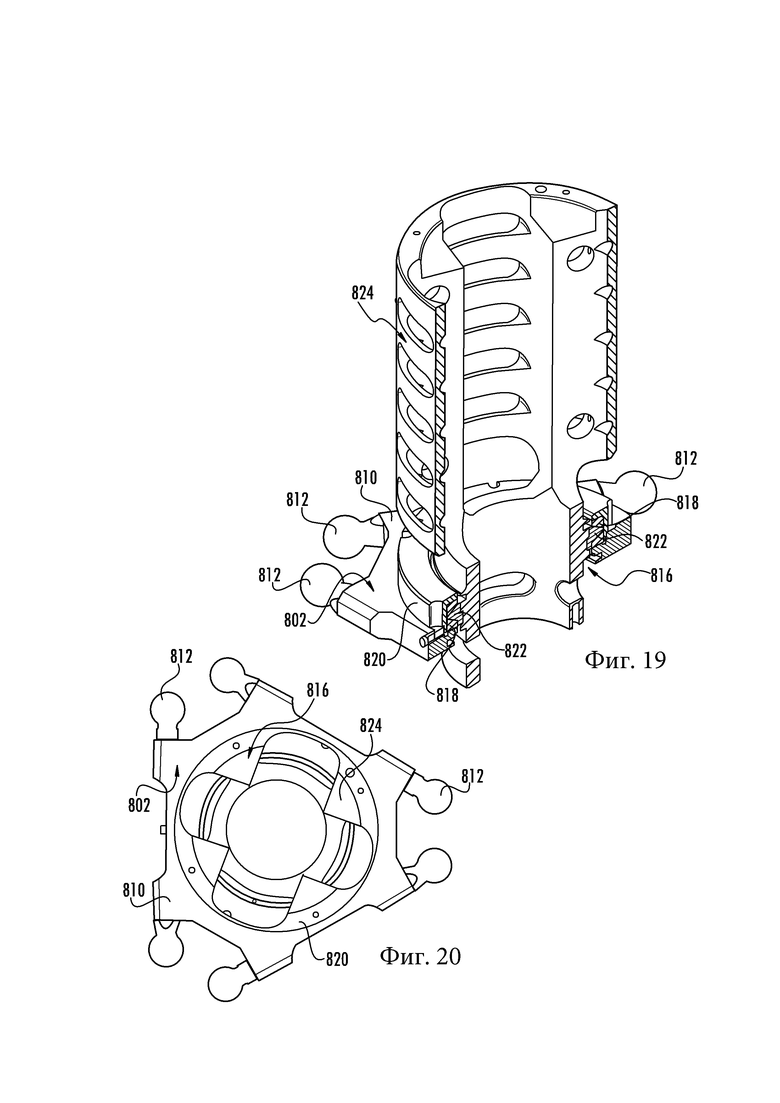
Фиг. 19 схематично изображает в аксонометрии разрез корпуса, присоединенного к запястной секции концевого исполнительного элемента, показанного на Фиг. 10;
Фиг. 20 схематично изображает вид сверху корпуса, присоединенного к запястной секции концевого исполнительного элемента, показанного на Фиг. 10;
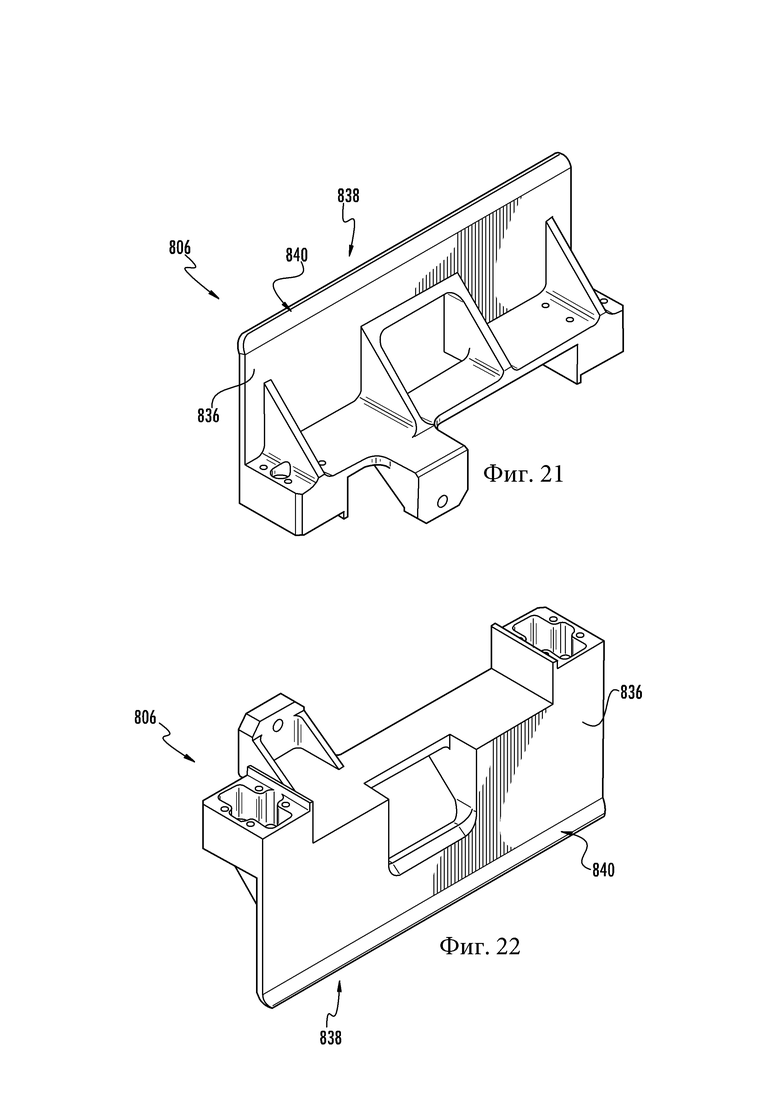
Фиг. 21-22 схематично изображают в аксонометрии захватную лопатку концевого исполнительного элемента, показанного на Фиг. 10;
Фиг. 23 схематично изображает вид в аксонометрии толкателя концевого исполнительного элемента, показанного на Фиг. 10;
Фиг. 24 изображает разрез толкателя, показанного на Фиг. 23;
Фиг. 25 изображает в увеличении закругленную секцию толкателя, показанного на Фиг. 24;
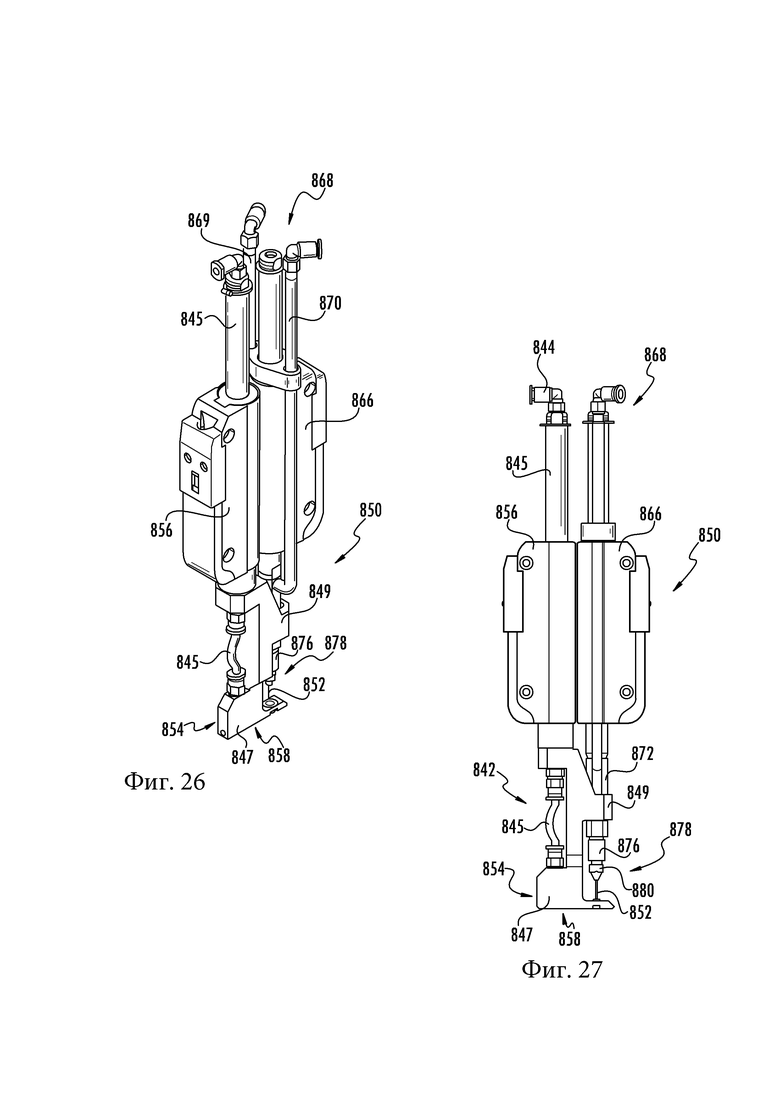
Фиг. 26 и 27 схематично изображают различные виды инъекционного узла концевого исполнительного элемента, показанного на Фиг. 10;
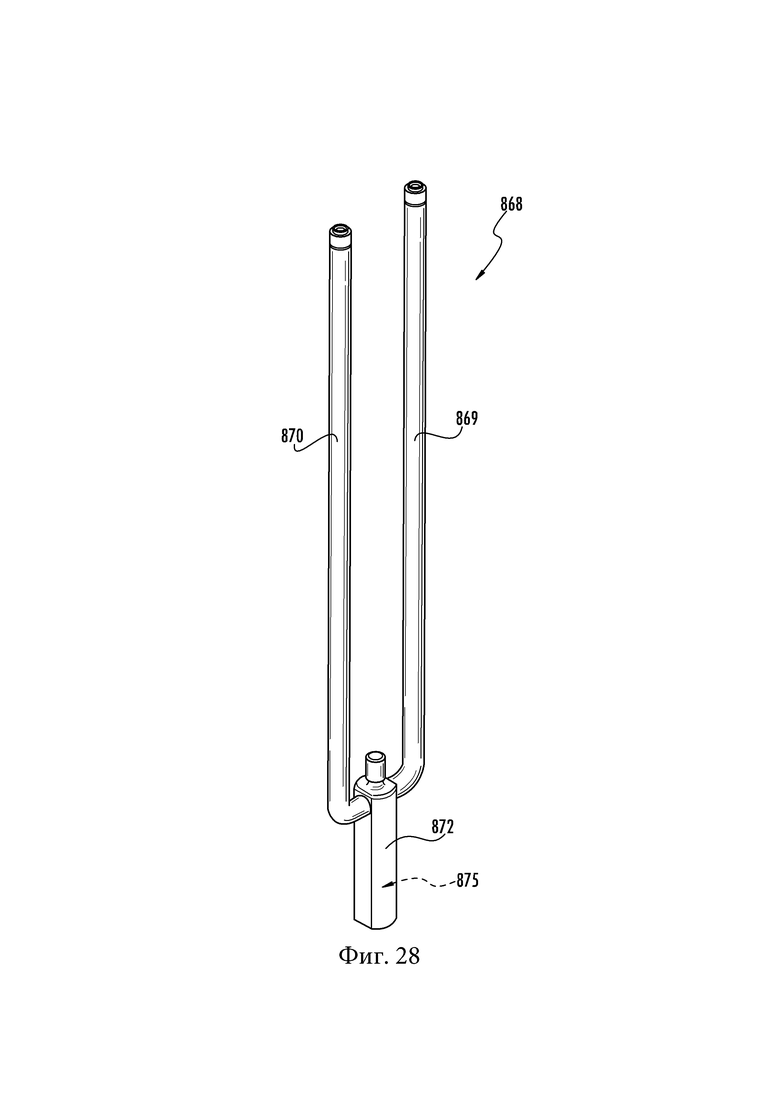
Фиг. 28 схематично изображает вид в аксонометрии узла для текучей среды концевого исполнительного элемента, показанного на Фиг. 10;
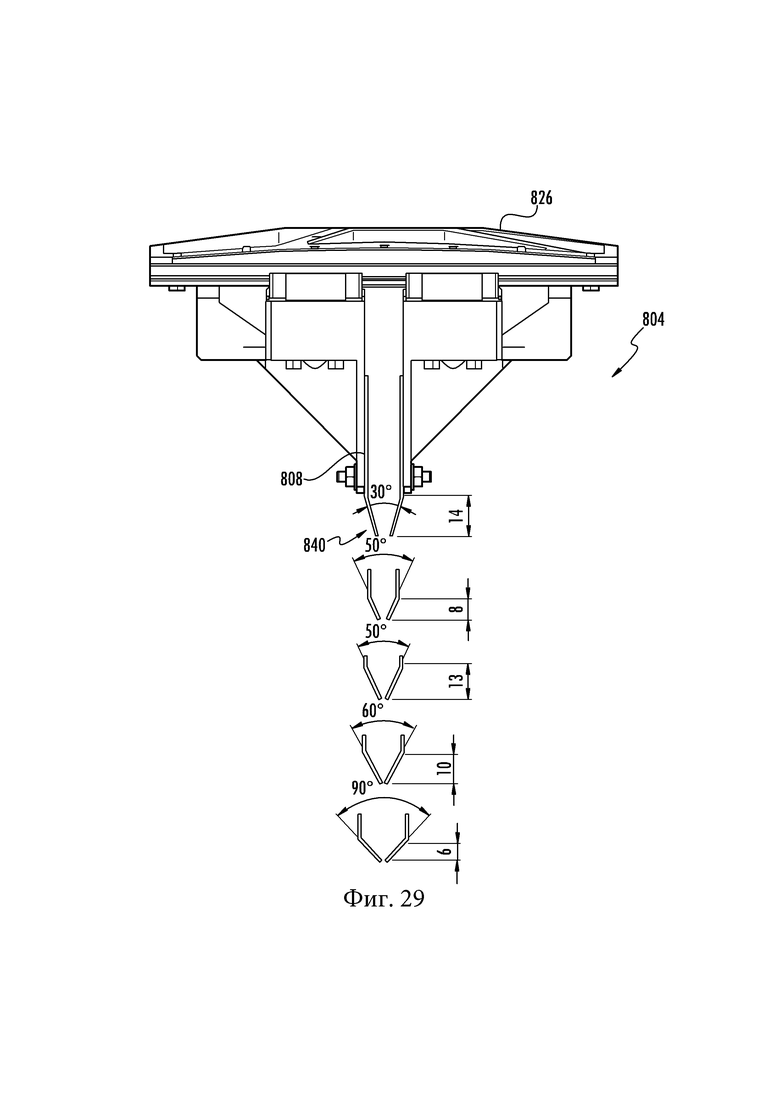
Фиг. 29 схематично изображает различные варианты выполнения захватного узла, предназначенного для ориентирования рыбы в требуемом положении, согласно различным аспектам данного изобретения;
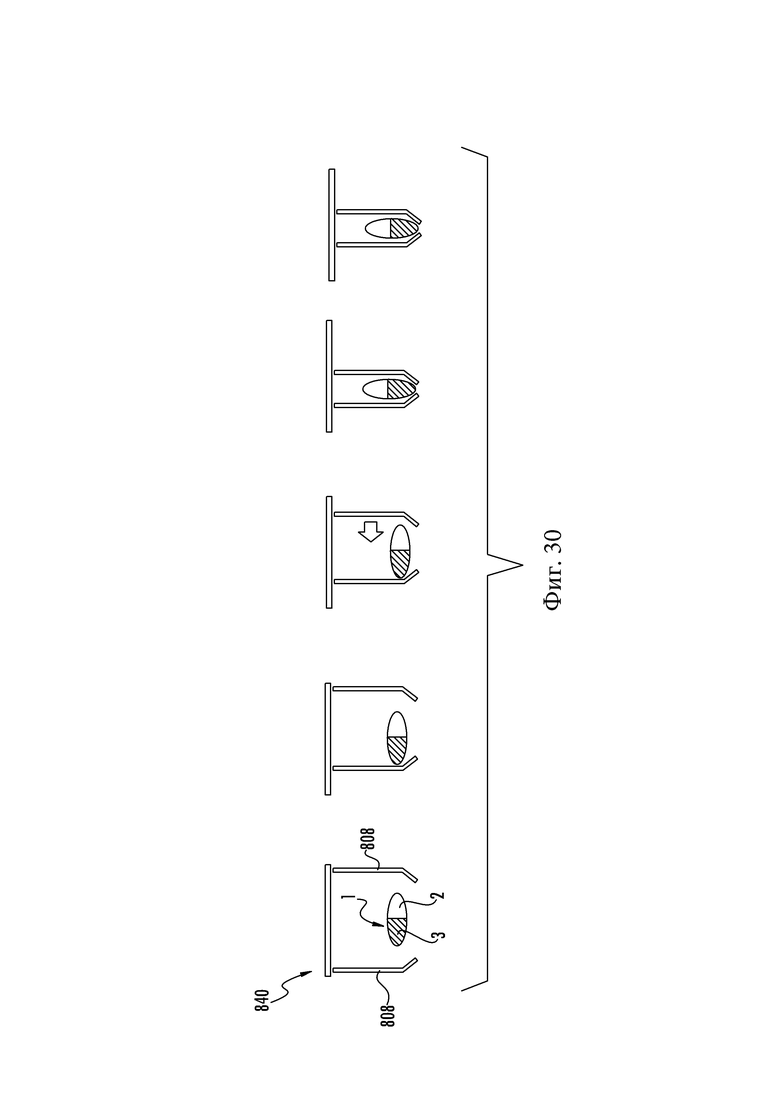
Фиг. 30 иллюстрирует последовательность ориентирования рыбы согласно одному аспекту данного изобретения; и
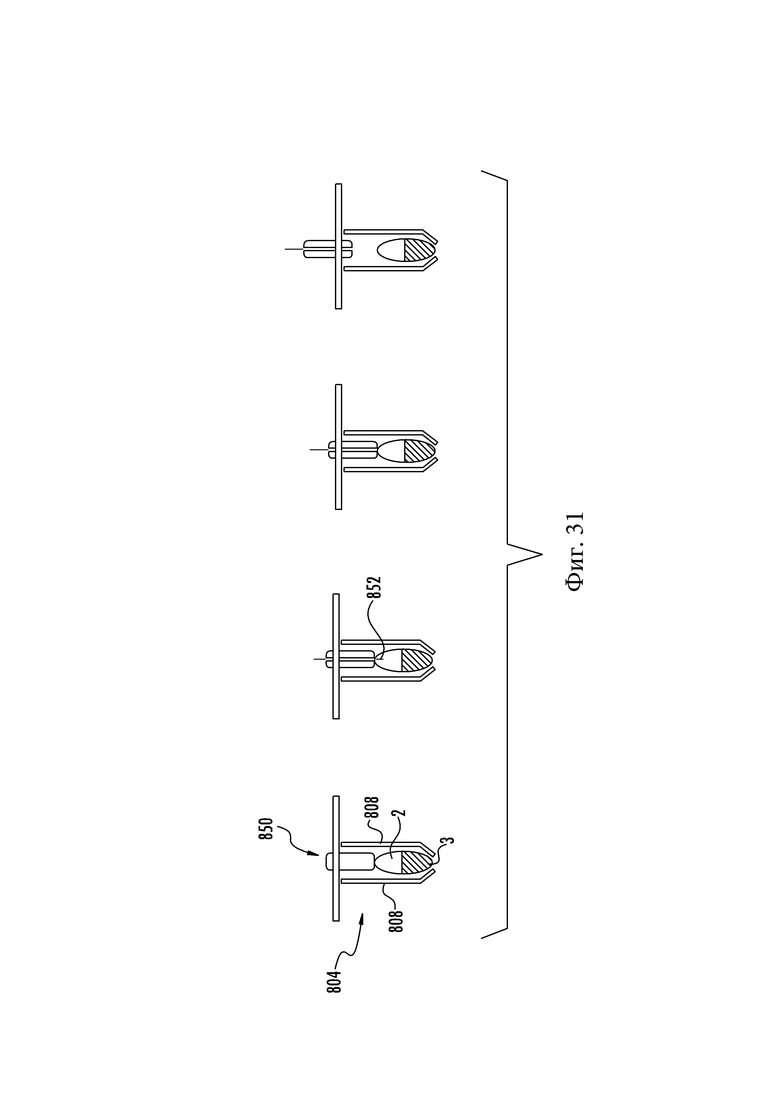
Фиг. 31 иллюстрирует последовательность вакцинации рыбы после ее захвата захватным узлом согласно одному аспекту данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее приведено более полное описание различных аспектов данного изобретения со ссылкой на сопроводительные чертежи, на которых показаны некоторые, но не все аспекты данного изобретения. В действительности данное изобретение может быть выполнено во множестве различных форм, при этом оно не должно толковаться как ограниченное приведенными в данном документе аспектами; кроме того, указанные аспекты выполнены так, чтобы данное изобретение удовлетворяло действующим законодательным требованиям. В тексте описания подобные элементы обозначены подобными ссылочными обозначениями.
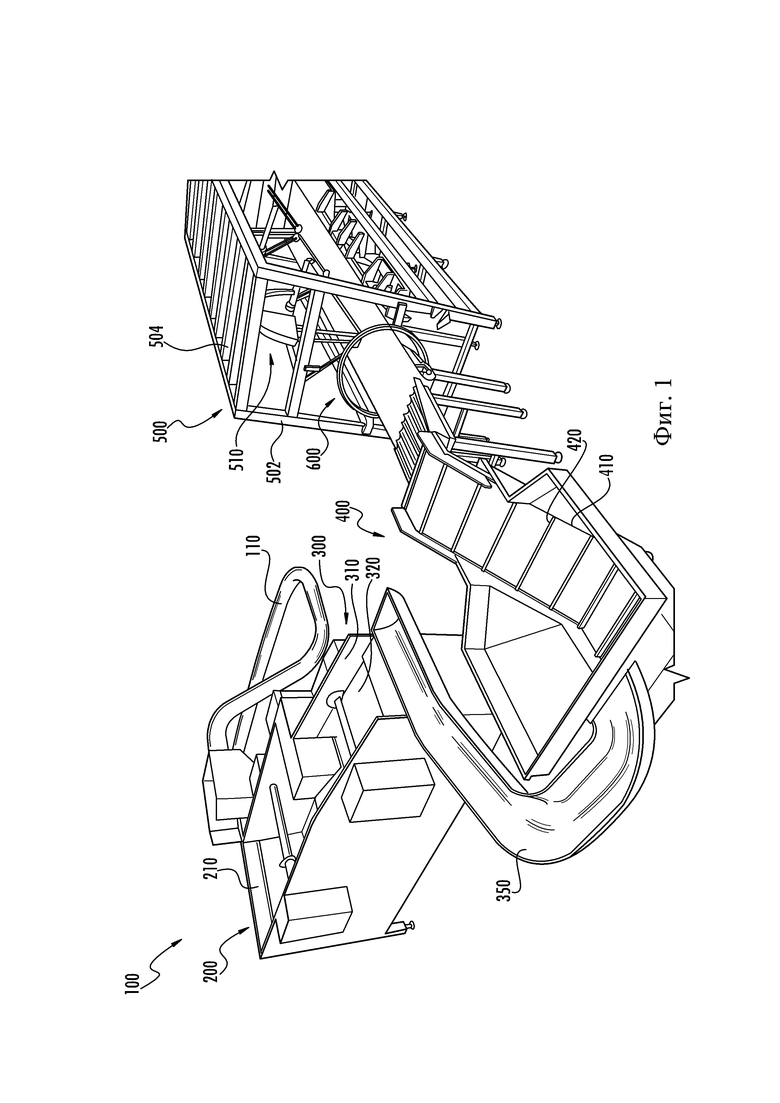
Далее со ссылкой на чертежи приведено описание устройств и способов согласно данному изобретению. На Фиг. 1 проиллюстрирован примерный вариант системы 100 обработки рыбы, предназначенной для обработки живой, но анестезированной/усыпленной рыбы. Указанная система 100 может содержать любое количество модулей, подсистем или блоков, выполненных с возможностью взаимодействия друг с другом для обработки живой рыбы в автоматизированном режиме. Например, указанная система 100 может содержать накопительный блок 200, блок 300 для анестезии, транспортерный блок 400 и блок 500 обработки рыбы.
Живая рыба сначала может быть доставлена через трубопровод 110 в накопительный блок 200, содержащий накопительный резервуар 210, заполненный водой. Вращающаяся платформа (не показана) выполнена с возможностью вращения в накопительном резервуаре 210 для подъема из него рыбы и доставки ее в резервуар 310 для анестезии блока 300. Вода в резервуаре 310 содержит анестезирующий препарат для усыпления рыбы. Блок 300 для анестезии также может содержать вращающуюся платформу 320 для доставки усыпленной рыбы в желоб 350 с проточной водой. По желобу 350 рыбу доставляют в транспортерный блок 400 для поштучного разделения и/или отделения для выполнения обработки. Транспортерный блок 400 может содержать бесконечную ленту 410, содержащую перекладины 420, проходящие поперечно направлению перемещения бесконечной ленты 410. Перекладины 420 могут использоваться для транспортировки рыбы с подъемом наверх с обеспечением поштучного разделения и/или отделения рыбы.
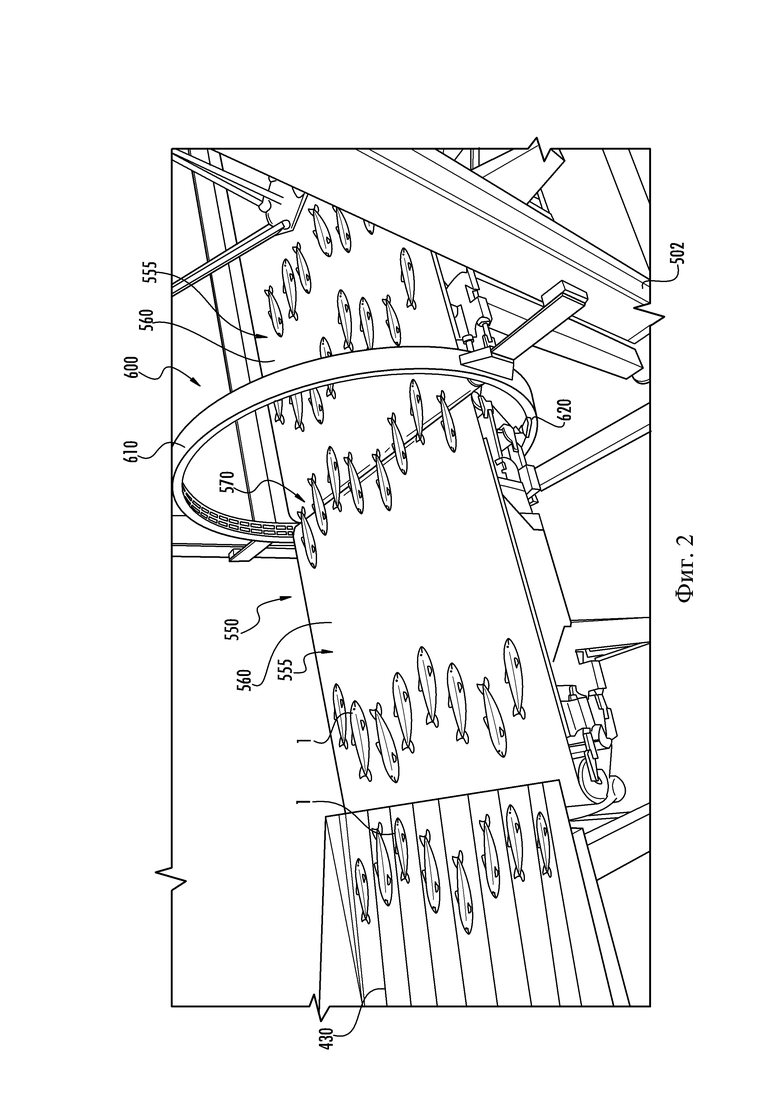
Как показано на Фиг. 2, транспортерный блок 400 может содержать разделители 430, образующие множество дорожек, по которым рыба 1 перемещается по отдельности для раздельной доставки в блок 500 обработки рыбы. Для перемещения рыбы 1 через блок 500 обработки рыбы может быть выполнен транспортерный узел 550, содержащий один или более сегментов 555. Транспортерный узел 550 может быть образован одной или более бесконечными лентами 560. Система 600 обследования может быть выполнена с возможностью обследования усыпленной рыбы 1 на наличие дефектов. Дополнительно, система 600 обследования выполнена с возможностью измерения различных параметров рыбы, таких как длина рыбы от кончика рыла до лучей хвостового плавника и ее размер. На основании этих измерений с помощью процессора может быть определен расчетный вес каждой рыбы. Такая информация может быть использована для прицеливания в требуемую точку на рыбе для выполнения инъекции, что более подробно описано далее.
В некоторых случаях система 600 обследования может содержать систему захвата изображения или видеосистему для оптического сканирования рыбы по мере ее перемещения вдоль транспортерного узла 550. Согласно некоторым аспектам транспортерный узел 550 может иметь зазор 570 между двумя сегментами 555 транспортера, при этом первое средство 610 захвата изображения расположено над зазором 570, а второе средство 620 захвата изображения расположено под зазором 570, снизу под транспортерным узлом 550. Благодаря использованию указанных первого и второго средств 610, 620 может быть получено трехмерное изображение каждой рыбы независимо от ее ориентации на транспортерном узле 550. Таким образом, обе стороны рыбы могут быть отображены так, что могут быть визуально выявлены дефекты внешнего строения рыбы. Указанное второе средство 620 выполнено с возможностью захвата фрагментов изображения рыбы по мере ее прохождения над зазором 570. Указанные фрагменты могут быть объединены или совмещены с помощью процессора, содержащего алгоритмы обработки изображений, чтобы получить изображение стороны рыбы, прилегающей к транспортерному узлу 550.
Система 600 обследования соединена с контроллером для управления различными аспектами обследования, включая возможность подачи команд системе 600 обследования и другим компонентам блока 500 обработки рыбы. Визуальная информация, обрабатываемая процессором, может быть передана контроллеру для обработки рыбы, как описано далее.
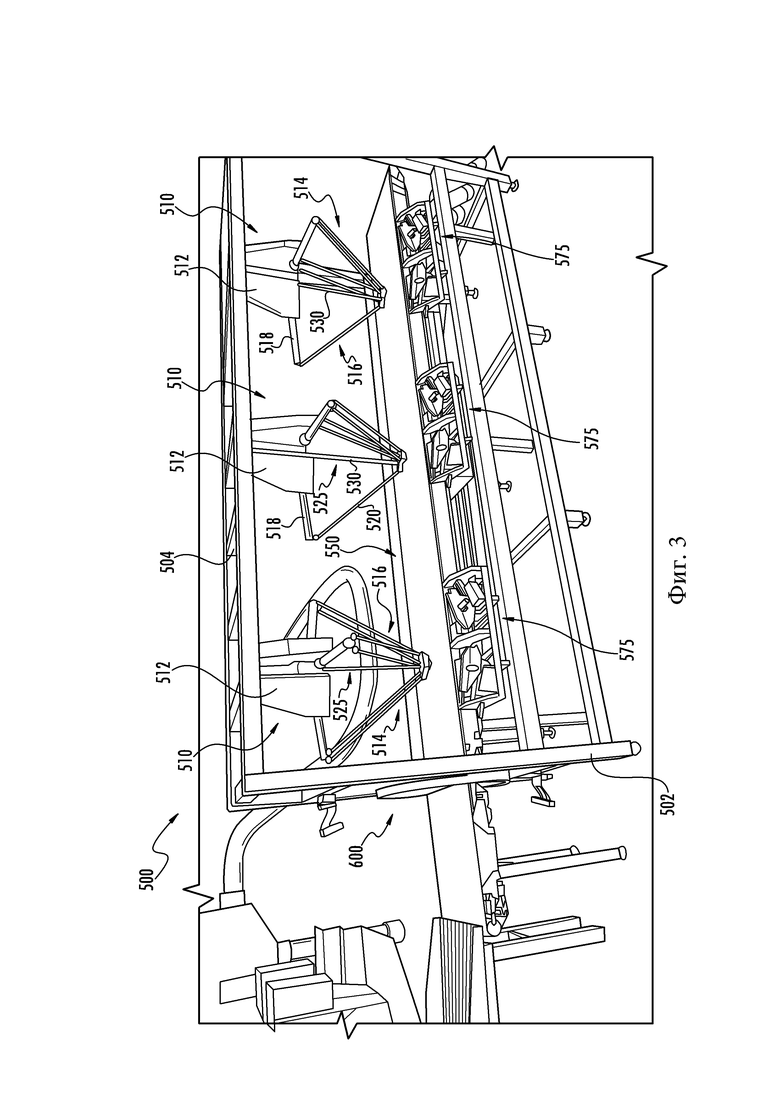
Как показано на Фиг. 3, блок 500 обработки рыбы может содержать раму 502 для поддерживания транспортерного узла 550. В некоторых случаях одна или более секций блока 500 могут быть закрыты кожухом (не показан), присоединенным к раме 502. Рама 502 может содержать балку 504, от которой отходит один или более роботизированных модулей 510, которые проходят в направлении транспортерного узла 550 с возможностью взаимодействия с транспортируемой рыбой. Согласно некоторым аспектам роботизированный модуль 510 может быть параллельным роботом (который также известен как дельта-робот, робот-паук или перегрузочный робот), выполненным в виде манипулятора с параллельным механизмом, в котором базовая секция 512 и подвижная секция 802 соединены между собой с помощью приводного механизма 514 для подвижной секции, содержащего собранные из звеньев конструкции 516, выполненные с возможностью параллельного перемещения и имеющие конфигурацию, благодаря которой подвижная секция 802 выполняет трехмерное поступательное перемещение относительно базовой секции 512 (т.е. обеспечен параллельный робот с параллельным механизмом, имеющим три степени свободы). Такой параллельный робот доступен для приобретения в Schneider Electric под торговым наименованием PacDrive Delta 3 robot (Р4 robot). Однако данное изобретение не ограничено такой конфигурацией и также может быть применено к конфигурации, оснащенной параллельным механизмом, имеющим четыре или более степеней свободы, в котором подвижная секция 802 выполнена с возможностью поворотного перемещения с одной, двумя или тремя степенями свободы относительно базовой секции 512 в дополнение к поступательному перемещению с тремя степенями свободы.
Приводной механизм 514 для подвижной секции содержит три собранные из звеньев конструкции 516, расположенные параллельно друг другу, и три первичных движителя (или серводвигателя) для соответствующего приведения в действие конструкций 516. Каждая конструкция 516 содержит ведущее звено 518, шарнирно присоединенное к базовой секции 512 и к выходной части соответствующего первичного движителя с помощью вращательных пар и вспомогательного звена, и параллельную пару приводных звеньев 520, шарнирно присоединенных с помощью вращательной пары к дистальному концу ведущего звена 518. Дистальные концы параллельных приводных звеньев 520 шарнирно присоединены с помощью вращательной пары к подвижной секции 802. Более конкретно, между ведущим звеном 518 и приводными звеньями 520, а также между приводными звеньями 520 и подвижной секцией 802 выполнены универсальные шарниры 812.
В некоторых случаях может быть желательным, чтобы роботизированный модуль 510 был выполнен с возможностью обеспечения поворотного перемещения. Таким образом, роботизированный модуль 510 может содержать приводной механизм 525 для запястной секции, установленной с возможностью поворота в подвижной секции 802, при этом механизм 525 обеспечивает поворотное перемещение запястной секции 816 относительно подвижной секции 802. Согласно некоторым аспектам роботизированный модуль 510 может обеспечивать поворот с одной, двумя или тремя степенями свободы. Приводной механизм 525 может содержать передаточный элемент 530 (например, вращающийся вал), выполненный в виде монолитного или цельного элемента в форме стержня.
Роботизированный модуль 510 соединен с указанным контроллером так, что обеспечена возможность передачи информации, полученной от системы 600 обследования, такой как размер рыбы и положение/ориентация рыбы на транспортерном узле 550, в роботизированный модуль 510 и обработана в соответствии с алгоритмами управления ориентацией. В этом случае роботизированный модуль 510 может быть синхронизирован с транспортерным узлом 550 так, что обеспечена возможность взаимодействия модуля 510 с рыбой во время ее непрерывного перемещения на транспортерном узле 550, тем самым, обеспечивая требуемую пропускную способность. Таким образом, роботизированный модуль 510 выполнен с возможностью точного расположения и взаимодействия с каждой рыбой по мере ее транспортировки вдоль транспортерного узла 550.
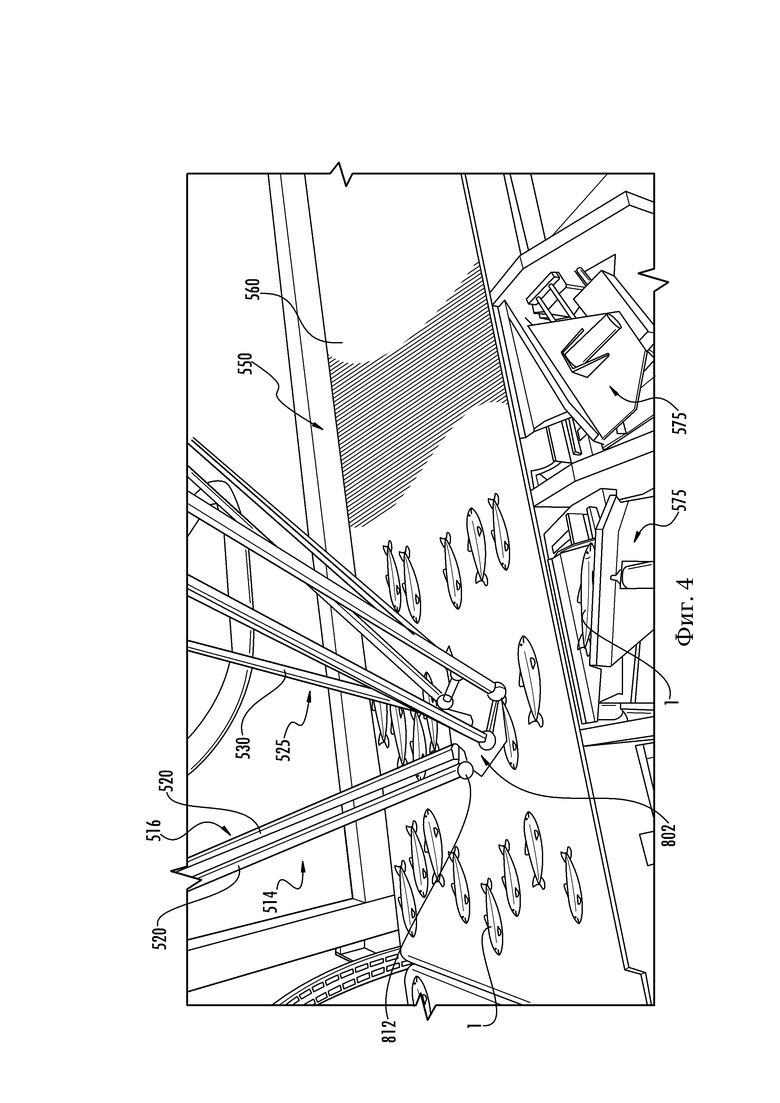
Концевой исполнительный элемент 800 может быть выполнен с возможностью взаимодействия с живой рыбой, перемещающейся на транспортерном узле 550, при этом такой элемент 800 содержит подвижную секцию 802, выполненную в виде его компонента. В этом случае роботизированный модуль 510 выполнен с возможностью обеспечения поступательного и/или поворотного перемещения концевого элемента 800. Роботизированный модуль 510 выполнен с возможностью перемещения концевого элемента 800 с требуемой скоростью, чтобы получить требуемую пропускную способность. Несмотря на то, что блок 500 обработки рыбы, показанный на Фиг. 3, содержит три роботизированных модуля 510, следует понимать, что может быть выполнено любое количество модулей 510 для соблюдения условий для заданной пропускной способности или для выполнения различных требуемых функций.
Теперь обратимся к Фиг. 4, на которой показан концевой элемент 800, выполненный с возможностью захвата живой рыбы 1 независимо от ее ориентации на транспортерном узле 550, подъема рыбы с транспортерного узла 550 и последующего перемещения рыбы к инъекционному средству 575. Поскольку концевой элемент 800 выполнен с возможностью поворота, рыба 1 может находиться в любой ориентации на транспортерном узле 550, тем самым, исключая необходимость выполнения физически трудоемких действий выше по потоку, а также необходимость использования оборудования для ориентирования рыбы в одном направлении. Поскольку для некоторых рыб (например, лосося, форели, морского окуня) инъекции в их брюшной части выполняют на небольшом целевом участке (например, для лосося - на участке длиной около 1 см) вдоль центральной линии, с помощью концевого элемента 800 рыба может быть ориентирована с размещением в требуемой ориентации на инъекционном средстве 575. Поскольку концевой элемент 800 выполнен с возможностью поворота, ориентация рыбы на транспортерном узле 550 является несущественной, так как концевой элемент 800 выполнен с возможностью поворота рыбы с обеспечением любой ориентации для размещения на инъекционном средстве 575. После вакцинации рыба может быть направлена к сортировочному блоку 700, как показано на Фиг. 5. Сортировочный блок 700 может содержать один или более спускных желобов 710 для сортировки рыбы по размеру, определенному с помощью системы 600 обследования. По спускным желобам 710 может быть обеспечено перемещение рыбы с попаданием в один из каналов 720 с проточной водой, выполненных в системе 730 выведения рыбы.
В соответствии с некоторыми аспектами концевой элемент 800 может быть выполнен с возможностью выполнения инъекций или взятия проб рыбы по мере ее перемещения вдоль транспортерного узла 550. В этом случае некоторые вакцины или другие лечебные жидкости могут быть введены в целевые участки на боковой стороне рыбы, а не в брюшную часть. В таких случаях может быть желательным просто оставить рыбу на транспортерном узле 550 во время последовательного инъецирования, при этом рыба может быть отсортирована в конце транспортерного узла 550 или с помощью расположенного следующим модуля 510, выполненного с возможностью захвата. Этот вариант также применим для взятия пробы рыбы по мере перемещения рыбы вдоль транспортерного узла 550. Взятая проба может быть передана из концевого элемента 800 в приемник для проб для проведения анализа. После анализа пробы информация может быть передана в роботизированный модуль 510, расположенный ниже по потоку, для выполнения требуемой сортировки. Таким образом, следует понимать, что блок 500 обработки рыбы может содержать роботизированные модули 510, содержащие различные концевые исполнительные элементы 800 для взаимодействия с рыбой различным образом.
В некоторых случаях может быть желательным объединить функции захвата и инъекции (или взятия проб) в одном концевом элементе 800, чтобы улучшить производительность и уменьшить площадь, занимаемую блоком 500 обработки рыбы, как показано на Фиг. 6-9 и 31. В этом случае нет необходимости перемещать рыбу к отдельному инъекционному средству 575; вместо этого концевой элемент 800 выполнен с возможностью захвата и подъема рыбы в требуемой ориентации, инъецирования лечебного вещества и транспортировки рыбы к сортировочной системе 700. Фиг. 7 иллюстрирует поворот концевого элемента 800 для обеспечения доставки рыбы к сортировочной системе 700 согласно одному аспекту. Обычно целевой участок для инъекции рыбы смещен вдоль длины брюшной части, при этом роботизированный модуль 510 обеспечивает перемещение концевого элемента 800 к местоположению относительно рыбы, в котором может быть выполнена инъекция в участок-мишень, на основании информации, полученной из системы 600 обследования, независимо от ориентации рыбы на транспортерном узле 550. В этом случае нет необходимости в боковом регулировании инъекционного механизма концевого элемента 800, чтобы выполнить инъекцию в участок-мишень, несмотря на то, что может быть обеспечена возможность такого регулирования.
В тех случаях, когда брюшная часть рыбы является участком-мишенью, предназначенным для инъекции или для отбора проб, концевой элемент 800 может быть выполнен с возможностью ориентирования рыбы так, чтобы брюшная часть была расположена с обеспечением доступа к ней для инъекционного механизма концевого элемента 800, как показано на Фиг. 8 и 9. Концевой элемент 800 может содержать захватный узел 804 с взаимодействующими элементами 806, которые при соединении обеспечивают ориентирование и захват рыбы для выполнения инъекций и транспортировки. Как показано на чертеже, взаимодействующие элементы 806 могут быть образованы в виде пары захватных лопаток 808, выполненных с возможностью перемещения в направлении друг к другу и друг от друга для захвата и выпуска рыбы. Противоположные захватные лопатки 808 при соединении обеспечивают ориентацию рыбы, при которой ее брюшная часть обращена вверх, и имеющийся на ней участок-мишень доступен для инъекционного средства или средства отбора проб.
Обратимся теперь к Фиг. 10-28, на которых проиллюстрированы примерный концевой элемент 800 и соединенные с ним компоненты с совмещенными функциями захвата и выполнения инъекций (или отбора проб). Концевой элемент 800 содержит подвижную секцию 802, выполненную с возможностью поступательного и поворотного перемещения с помощью роботизированного модуля 510. Подвижная секция 802 может содержать параллельную пластину 810, содержащую шарниры 812, выполненные с возможностью присоединения к конструкциям 516 для обеспечения поступательного перемещения концевого элемента 800. Крышка 814 концевого элемента 800 может быть присоединена с помощью соответствующих крепежных средств к передаточному элементу 530 для обеспечения поворотного перемещения на запястной секции 816, которая установлена с возможностью поворота в подвижной секции 802. Запястная секция 816 может содержать опорное кольцо 818, опорное зажимное кольцо 820 и подшипник 822, как показано на Фиг. 19. Запястная секция 816 выполнена с возможностью поворота относительно параллельной пластины 810. Запястная секция 816 может быть соединена с корпусом 824, соединенным с крышкой 814 так, что поворот, обеспеченный передаточным элементом 530, передается запястной секции 816.
Захватный узел 804 может быть присоединен к запястной секции 816 так, что может быть получена требуемая ориентация, зеркально отражающая ориентацию рыбы. Таким образом, захватные лопатки 808 захватного узла 804 могут быть расположены параллельно продольному направлению рыбы, независимо от ее ориентации на транспортерном узле 550. Захватный узел 804 может содержать основную пластину 826, присоединенную к корпусу 824 соответствующими крепежными средствами так, что основная пластина 826 также является поворотной. Две боковые направляющие 828 могут быть присоединены к противоположным сторонам основной пластины 826. Боковые направляющие 828 ограничивают опорную выемку 830, выполненную с возможностью приема опорного средства 832 с возможностью скольжения средства 832 вдоль соответствующие боковой направляющей 828. Два опорных средства 832 могут быть присоединены к противоположным концам захватных лопаток 808 для скольжения захватной лопатки 808 вдоль боковых направляющих 828 с помощью опорных средств 832. В этом случае боковые направляющие 828 ориентированы поперечно захватным лопаткам 808. Фиг. 11 иллюстрирует захватные лопатки 808 в полностью открытом положении, а Фиг. 12 иллюстрирует их в полностью закрытом положении.
Захватный узел 804 также может содержать два исполнительных механизма 834 для захвата, таких как линейные исполнительные механизмы, для перемещения захватных лопаток 808 так, чтобы выполнить захват. Каждая захватная лопатка 808 содержит соответствующий исполнительный механизм 834 для захвата, соединенный с ней так, что обеспечено независимое управление каждой лопаткой 808. Такое независимое управление каждой захватной лопаткой 808 является эффективным, хотя и не обязательным, поскольку такое управление может использоваться для обеспечения поворота плоско-лежащей рыбы, чтобы получить требуемую ориентацию, как проиллюстрировано в последовательности, показанной на Фиг. 30. В этом случае при расположении захватного узла 804 вблизи рыбы 1 захватная лопатка 808, расположенная рядом с брюшной частью (незаштрихованная часть 2), может перемещаться с большей скоростью, чем другая захватная лопатка 808, расположенная вблизи стороны спинного хребта (заштрихованная часть 3) рыбы 1, в результате чего брюшная часть 2 входит во взаимодействие с лопаткой первой или с такой скоростью, чтобы вызвать поворот рыбы в ориентации, при которой брюшная часть 2 обращена наверх. Однако в некоторых случаях захватная лопатка 808, расположенная вблизи стороны 3 спинного хребта, может быть перемещена в стабилизирующее положение рядом с рыбой 1 и/или в контакте с ней до перемещения захватной лопатки 808, которая будет взаимодействовать с брюшной частью 2. Таким образом, когда захватные лопатки 808 продвигаются внутрь, рыба может быть дополнительно сжата для перемещения с обеспечением требуемой ориентации. Для выполнения инъекций точное расположение захватных лопаток 808 относительно рыбы 1 обеспечивается с помощью роботизированного модуля 510, поскольку рыба после захвата не может перемещаться в продольном направлении внутри захватного узла 804.
Однако следует понимать, что захватные лопатки 808 могут перемещаться с одинаковой скоростью для обеспечения приемлемой ориентации рыбы, исходя из ее внешнего строения. Кроме того, следует понимать, что концевой элемент 800 и, соответственно, захватный узел 804, могут быть наклонены (повернуты в сторону от вертикальной оси) с помощью роботизированного модуля 510, чтобы способствовать ориентированию рыбы во время последовательного захвата. Кроме того, одна из захватных лопаток 808 изначально может быть расположена ближе к рыбе, чтобы обеспечить требуемый переворот рыбы.
Каждая захватная лопатка 808 может содержать пластину 836 (Фиг. 21 и 22), проходящую в сторону от основной пластины 826 по существу перпендикулярно ей. В некоторых случаях дистальный конец 838 пластины 836 может содержать проходящую под углом секцию 840 для подхватывания рыбы снизу путем взаимодействия с закругленными наружными участками брюшной части рыбы и противоположной стороны ее спинного хребта. Фиг. 29 показывает различные примеры того, как могут быть расположены захватные лопатки 808 для ориентирования рыбы. Как показано на чертеже, участки захватных лопаток 808, входящие в контакт с рыбой, могут различаться по длине и/или углу.
В некоторых случаях захватные лопатки 808 выполнены с возможностью саморегулирования до исходного положения после захвата рыбы захватным узлом 804 так, что рыба находится в требуемом положении для выполнения инъекций (или отбора проб), как показано на Фиг. 30. Таким образом, захватный узел может быть выровнен с рыбой в продольном направлении так, что захватные лопатки 808 выровнены относительно центральной линии рыбы. Поскольку захватные лопатки 808 могут работать с разной скоростью, чтобы обеспечить ориентацию брюшной части вверх, рыба может быть захвачена в смещенном от центра местоположении. Таким образом, захватные лопатки 808 могут быть перемещены для выравнивания рыбы по центру в захватном узле 804, как показано на Фиг. 30.
Как показано на Фиг. 31, концевой элемент 800 может содержать узел 850 для выполнения инъекций (или отбора проб) для введения вещества в рыбу или для взятия из рыбы пробы. Несмотря на то, что в тексте описания указан инъекционный узел, следует понимать, что такой узел также может использоваться для извлечения ткани или взятия из рыбы пробы жидкости. Поскольку на наружной части рыбы, включая брюшную часть, имеются жесткие чешуйки и кожа, может потребоваться сжать участок рыбы вблизи участка-мишени для инъекций так, чтобы инъекционная игла 852 проколола кожу, а не оттолкнула рыбу в сторону. Для этого может быть предусмотрен толкатель 854, обеспечивающий легкое сжатие брюшной части рыбы во время инъекции, чтобы обездвижить участок-мишень для инъекции. Толкатель 854 может быть соединен с исполнительным механизмом 856 толкателя, таким как линейный исполнительный механизм, для введения конца 858 толкателя 854 в контакт с рыбой. Величина давления, прикладываемая толкателем 854, может быть отрегулирована в процессе с помощью механизма 856 в зависимости от размера рыбы.
В некоторых случаях толкатель 854 также может содержать очищающий узел 842, предназначенный для очистки инъекционной иглы 852 от рыбных чешуек или другого мусора. Соединительный элемент 844 для очищающей текучей среды может быть соединен с резервуаром, содержащим очищающую текучую среду (например, воду). Труба 845 обеспечивает проточное сообщение между соединительным элементом 844 и каналом 846 для текучей среды, ограниченным корпусом 847 толкателя. Канал 846 оканчивается выходным отверстием 848. Направляющая иглу вставка 860 может быть расположена внутри отверстия 841, ограниченного плечом 843, проходящим от корпуса 847 толкателя. Корпус 861 вставки 860 может ограничивать первый и второй каналы 862, 864, пересекающиеся внутри корпуса 861. Первый канал 862 проточно сообщается с каналом 846 для текучей среды так, что очищающая текучая среда может быть направлена в первый и второй каналы 862, 864 для смывания мусора с инъекционной иглы 852, которая перемещается в продольном направлении через второй канал 864 во время последовательного выполнения инъекции. Корпус 861 вставки может ограничивать впускное отверстие 867 в форме усеченного конуса и выпускное отверстие 863, через которые инъекционная игла 852 входит и выходит. В этом случае во время отведения инъекционной иглы 852 внутрь корпуса 861 вставки (см. Фиг. 16) любой мусор (например, рыбные чешуйки), имеющиеся на игле 852, может быть механически удален. От корпуса 847 толкателя может проходить направляющая опора 849, ограничивающая отверстие 865 для приема инъекционного узла 850.
Инъекционный узел 850 может проходить через корпус 824 и выполнен с возможностью доставки лечебного вещества в живую рыбу, как в частности показано на Фиг. 16-18. Фиг. 16 иллюстрирует инъекционный узел 850 в нерабочем положении, в котором инъекционная игла 852 втянута внутрь вставки 860, направляющей иглу. Фиг. 17 иллюстрирует инъекционный узел 850 в положении для выполнения инъекции сравнительно крупной рыбы, а Фиг. 18 иллюстрирует положение для инъекции рыбы меньшего размера. Однако следует понимать, что инъекционный узел 850 не ограничен перемещением в три проиллюстрированные положения, а, напротив, выполнен с возможностью регулирования с обеспечением различных положений для инъекций на основании размера рыбы, определяемого системой 600 обследования. Фиг. 31 иллюстрирует последовательность, с которой рыбу 1 захватывают захватным узлом 804, а затем обеспечивают взаимодействие брюшной части 2 с инъекционным узлом 850 для выполнения инъекции инъекционной иглой 852, которую затем отводят.
Как показано на Фиг. 26 и 27, для перемещения инъекционного узла 850 независимо от толкателя 854 может быть предусмотрен исполнительный механизм 866 для инъекций. Такое независимое управление инъекционным узлом 850 может быть использовано для регулирования глубины проникновения инъекционной иглы 852 в рыбу, исходя из размера рыбы. Таким образом, вместо введения иглы на определенную глубину, инъекционный узел 850 может быть выполнен с возможностью изменения величины проникновения иглы 852 в рыбу, благодаря чему лечебное вещество подают на заданную глубину на основании размера рыбы, определяемого системой 600 обследования. Инъекционный узел 850 выполнен с возможностью подачи в рыбу одного или более лечебных веществ (например, вакцин). В соответствии с одним аспектом инъекционный узел 850 может содержать узел 868 для текучей среды, содержащий первый трубопровод 869 для текучей среды и второй трубопровод 870 для текучей среды, каждый из которых проточно сообщается с соответствующей насосной системой для подачи лечебного вещества в инъекционную иглу 852. Каждая насосная система может проточно сообщаться с резервуаром для текучей среды, содержащим лечебное вещество (например, вакцину) для введения в рыбу. Как дополнительно показано на Фиг. 28, узел 868 для текучей среды может содержать соединительный корпус 872, ограничивающий соединительную камеру, в которую из первого и второго трубопроводов 869, 870 для текучей среды подается соответствующее лечебное вещество. Несмотря на то, что проиллюстрированный узел 868 для текучей среды содержит две линии трубопроводов для текучей среды, следует понимать, что с помощью дополнительного трубопровода может быть подано любое количество лечебных веществ.
С соединительной камерой 875, ограниченной соединительным корпусом 872, может проточно сообщаться пневматическая линия 874, обеспечивающая приложение давления воздуха для вытеснения лечебного вещества из инъекционной иглы 852 для подачи этого вещества в участок-мишень после прокалывания кожи на требуемую глубину. Для обеспечения требуемого давления воздуха пневматическая линия 874 может проточно сообщаться со средством принудительной подачи воздуха.
Для соединения узла 878 иглы с узлом 868 для текучей среды может быть обеспечен переходник 876 для иглы. Узел 878 иглы может содержать втулку 880 и инъекционную иглу 852, которая ограничивает канюлю, через которую проходит лечебное вещество. Как описано выше, инъекционная игла 852 может быть отрегулирована для прохождения на требуемую глубину в зависимости от размера рыбы, определяемого системой 600 обследования.
Как указано выше, примерный концевой элемент 800, показанный на Фиг. 10-28, может быть модифицирован так, что выполнять только инъекции (или отбор проб), путем удаления или иного исключения захватного узла 804. В этом случае концевой элемент 800 может быть выполнен с возможностью перемещения по транспортерному узлу 550 для выполнения инъекций или отбора проб рыб с заданной точностью на основании информации, полученной от системы 600 обследования.
Многие модификации и другие аспекты данного изобретения, изложенные в данном документе, будут очевидны для специалиста в данной области техники, к которой относится заявленное изобретение, при этом обладая преимуществами, основанными на принципах, представленных в приведенном выше описании и на соответствующих чертежах. Таким образом, следует понимать, что данное изобретение не ограничено конкретными, описанными в этом документе аспектами, при этом модификации изобретения и другие его аспекты входят в объем прилагаемой формулы изобретения. Несмотря на то, что в данном документе используются определенные термины, их следует трактовать не в ограничительном, а только в обобщенном и описательном смысле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ обследования живой рыбы | 2018 |
|
RU2821412C1 |
| Аппарат для селективной обработки яиц и соответствующий способ | 2014 |
|
RU2623236C1 |
| ПРИБОР ДЛЯ АНАЛИЗА БИОЛОГИЧЕСКИХ ОБРАЗЦОВ И РЕАГЕНТОВ | 2015 |
|
RU2697877C2 |
| Устройство для захвата яиц, имеющее переплетенные элементы, и связанные с этим устройством системы и способы | 2018 |
|
RU2730662C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ ШТАНГАМИ БУРОВОЙ УСТАНОВКИ | 2014 |
|
RU2636334C2 |
| РАЗРЕЗНОЙ КОРПУС ЛЕЗВИЯ С УЗЛОМ РАЗЖИМНОЙ ВТУЛКИ ДЛЯ ПРИВОДНОГО ВРАЩАЮЩЕГОСЯ НОЖА | 2020 |
|
RU2822380C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МИКРОБОВ | 2010 |
|
RU2559909C2 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ НАПИТКОВ | 2015 |
|
RU2649232C2 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| ЭЛЕКТРИЧЕСКАЯ СХЕМА ДЛЯ РАЗРЯДА АККУМУЛЯТОРНОЙ БАТАРЕИ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2016 |
|
RU2714684C1 |

Блок обработки рыбы включает раму, содержащую балку, систему обследования живой рыбы, транспортерный узел, выполненный с возможностью транспортирования живой рыбы к системе обследования, по меньшей мере один роботизированный модуль, отходящий от балки, проходящий в направлении транспортерного узла и содержащий контроллер, выполненный с возможностью управления работой роботизированного модуля. Контроллер находится в связи с указанной системой обследования. Концевой исполнительный элемент функционально соединен с роботизированным модулем и выполнен с возможностью взаимодействия с живой рыбой, перемещающейся вдоль транспортерного узла, на основании информации, определенной посредством системы обследования и полученной контроллером. Также предложены способы обработки рыбы с использованием блока. Группа изобретений позволяет сократить физическое воздействие, оказываемое на живую рыбу, а также уменьшить общую площадь, занимаемую системой обработки рыбы. 3 н. и 12 з.п. ф-лы, 31 ил.
1. Блок обработки рыбы, содержащий
раму, содержащую балку,
систему обследования, предназначенную для обследования живой рыбы,
транспортерный узел, выполненный с возможностью транспортирования живой рыбы к указанной системе обследования,
по меньшей мере один роботизированный модуль, отходящий от балки, проходящий в направлении транспортерного узла и содержащий контроллер, выполненный с возможностью управления работой указанного модуля, причем указанный контроллер находится в связи с указанной системой обследования, и
концевой исполнительный элемент, функционально соединенный с указанным роботизированным модулем и выполненный с возможностью взаимодействия с живой рыбой, перемещающейся вдоль указанного транспортерного узла, на основании информации, определенной посредством указанной системы обследования и полученной указанным контроллером.
2. Блок по п.1, в котором роботизированный модуль выполнен с возможностью обеспечения поступательного и поворотного перемещения указанного концевого исполнительного элемента.
3. Блок по п.2, в котором концевой исполнительный элемент содержит подвижную секцию, функционально соединенную с роботизированным модулем для обеспечения поступательного перемещения, при этом концевой элемент содержит запястную секцию, выполненную с возможностью поворота относительно указанной подвижной секции и функционально соединенную с роботизированным модулем для обеспечения поворотного перемещения.
4. Блок по п.1, в котором концевой исполнительный элемент содержит захватный узел и инъекционный узел.
5. Блок по п.1, в котором концевой исполнительный элемент содержит захватный узел, содержащий взаимодействующие элементы, которые при соединении обеспечивают подъем живой рыбы с указанного транспортерного узла.
6. Блок по п.5, в котором указанные взаимодействующие элементы представляют собой две противоположные захватные лопатки.
7. Блок по п.5, в котором взаимодействующие элементы выполнены с обеспечением индивидуального и независимого управления с помощью соответствующих исполнительных механизмов для захвата.
8. Блок по п.1, в котором указанный концевой исполнительный элемент содержит инъекционный узел и толкатель, выполненный с возможностью индивидуального управления для сжатия живой рыбы во время выполнения инъекции.
9. Способ обработки живой рыбы, включающий
усыпление живой рыбы,
транспортировку живой рыбы к блоку обработки рыбы, содержащему систему обследования, причем блок обработки рыбы содержит раму с балкой,
обследование живой рыбы с помощью указанной системы обследования для получения информации о каждой живой рыбе,
передачу указанной информации об обследованной рыбе в роботизированный модуль, отходящий от балки и содержащий концевой исполнительный элемент, функционально соединенный с указанным модулем, при этом роботизированный модуль выполнен с возможностью взаимодействия с живой рыбой во время ее транспортировки, и
обработку живой рыбы концевым исполнительным элементом.
10. Способ по п.9, в котором живую рыбу обрабатывают концевым исполнительным элементом независимо от ориентации указанной рыбы во время ее транспортировки.
11. Способ по п.9, в котором при обработке живой рыбы концевым исполнительным элементом живую рыбу поднимают и транспортируют к заданному местоположению.
12. Способ по п.9, в котором при обработке живой рыбы концевым исполнительным элементом выполняют инъекцию живой рыбе с использованием по меньшей мере одного лечебного вещества.
13. Способ по п.9, в котором при обработке живой рыбы концевым исполнительным элементом отбирают пробу из указанной рыбы.
14. Способ по п.9, в котором при обработке живой рыбы концевым исполнительным элементом ориентируют рыбу и вводят лечебное вещество.
15. Способ обработки живой рыбы, осуществляемый с помощью блока по любому из пп.1-8.
| WO 2003069987 A1, 28.08.2003 | |||
| WO 1999000306 A2, 07.01.1999 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "СВИНИНА ШПИГОВАННАЯ ТУШЕНАЯ С ТУШЕНОЙ КАПУСТОЙ" | 2014 |
|
RU2551222C1 |
| WO 2012008843 A1, 19.01.2012 | |||
| СПОСОБ ВАКЦИНАЦИИ РЫБ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2018223C1 |

