Настоящее изобретение относится к области диагностической визуализации. Оно находит конкретное применение в корректировании движения пациента в радиоизотопном медицинском сканирующем устройстве, которое использует сбор данных в виде списка, и будет описываться с особым на это акцентом. Однако, следует понимать, что оно также находит применение в других устройствах, использующих сбор данных в виде списка, и не обязательно ограничивается вышеупомянутым применением.
Ядерные устройства визуализации и, в частности, сканеры позитронно-эмиссионной томографии (PET), непрерывно накапливают данные в течение относительно долгого периода времени. В течение этого периода времени в объекте обычно происходит движение. События излучения, происходящие в двигающихся частях объекта, смазывают траекторию их движения. Обычно, осуществляют мониторинг движения, такого как дыхательное или движение сердечной мышцы, при помощи внешних устройств. На основании состояния сердечной мышцы или дыхательной системы, при получении данных, данные изменяются в соответствии с ожидаемым внутренним движением. Изменение событий до обычного состояния движения включает в себя применение геометрического преобразования пространственных координат, в которых получают данные индивидуальных отсчетов. Однако, внешний мониторинг не всегда точно прогнозирует фактические состояния внутреннего движения.
Также, когда пространственные координаты событий изменяются или преобразуются с целью компенсировать движение, измененные координаты могут оказаться между расположением отдельных детекторных элементов. Дискретизирование измененных координат на ближайшие действительные координаты детекторных элементов дает возможность отсортировывать события с похожими координатами для ускоренной реконструкции. Однако, обычно происходит некоторая потеря информации во время дискретизации преобразованных событий. Данная потеря информации может препятствовать полной компенсации размытости изображения при окончательной реконструкции.
Настоящая заявка предлагает новое и усовершенствованное преобразование событий, способное сохранять данные в виде списка, которое преодолевает вышеупомянутые и другие проблемы.
Согласно одному аспекту, предлагается аппарат для диагностической визуализации данных. Детекторная матрица, включающая в себя индивидуальные детекторные элементы, воспринимает события излучения от области сканирования. Инициирующий процессор присваивает метку времени воспринятым потенциальным событиям. Процессор верификации событий применяет критерии верификации к пикам канала измерительного элемента. Процессор преобразования событий преобразует воспринятые события и соответствующие линии отклика в пространственно смещенные преобразованные события. Буферная память для хранения событий сохраняет действительные события, имеющие метку времени. Процессор восстановления реконструирует действительные события в виде изображения области сканирования.
Согласно другому аспекту, предлагается способ диагностической визуализации данных. Потенциальные события излучения воспринимаются от области сканирования. Воспринятым событиям излучения присваивается метка времени. К потенциальным событиям применяются критерии верификации. Верифицированные события и соответствующие линии отклика преобразуются в пространственно смещенные преобразованные события. Действительные события, имеющие метку времени, сохраняются. Действительные события реконструируются в виде изображения области сканирования.
Согласно другому аспекту, предлагается способ диагностической визуализации данных. Получают данные событий излучения, снабженные временными индексами. Выполняется, по меньшей мере, одно геометрическое преобразование данных, подверженных влиянию движения, с целью формирования уточненных данных, снабженных временными индексами. Реконструируют изображение, основанное на уточненных данных, снабженных временными индексами.
Одно из преимуществ состоит в возможности корректировать движение более точно.
Другое преимущество заключается в возможности корректировать движение без использования внешних мониторов либо увеличить точность, с которой определяется внутреннее движение при использовании внешних мониторов.
Еще одно преимущество состоит в возможности применять время-пролетную информацию, чтобы содействовать преобразованию события.
Также еще одно преимущество дает возможность применения функции отклика системы для содействия преобразованию события.
Другое преимущество заключается в использовании стандартного программного обеспечения для реконструкции посредством перевода первичного файла в виде списка в другой, скорректированный по движению, файл в виде списка.
Дополнительные преимущества настоящего изобретения станут понятны специалистам в данной области техники по прочтении и изучении следующего подробного описания.
Данное изобретение может принимать должную форму в различных компонентах и вариантах сочетания компонентов, а также в различных этапах и вариантах сочетания этапов. Чертежи имеют целью только проиллюстрировать предпочтительные варианты осуществления и не должны толковаться как ограничивающие данное изобретение.
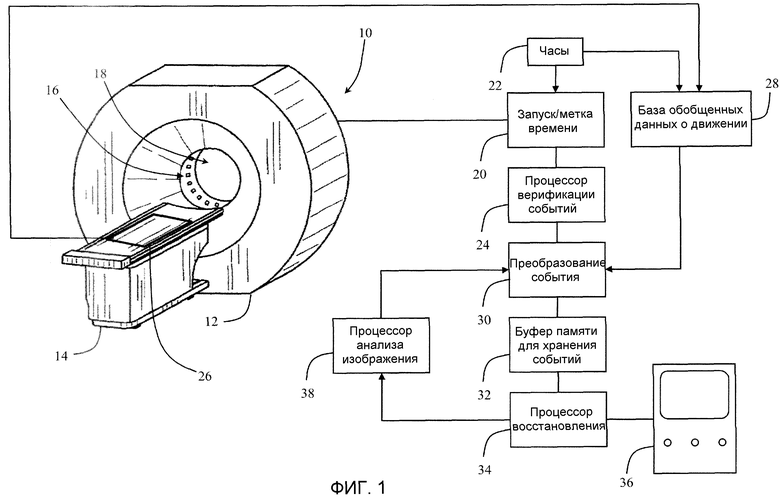
Фиг.1 представляет собой графическую иллюстрацию ядерного устройства визуализации, в соответствии с настоящей заявкой;
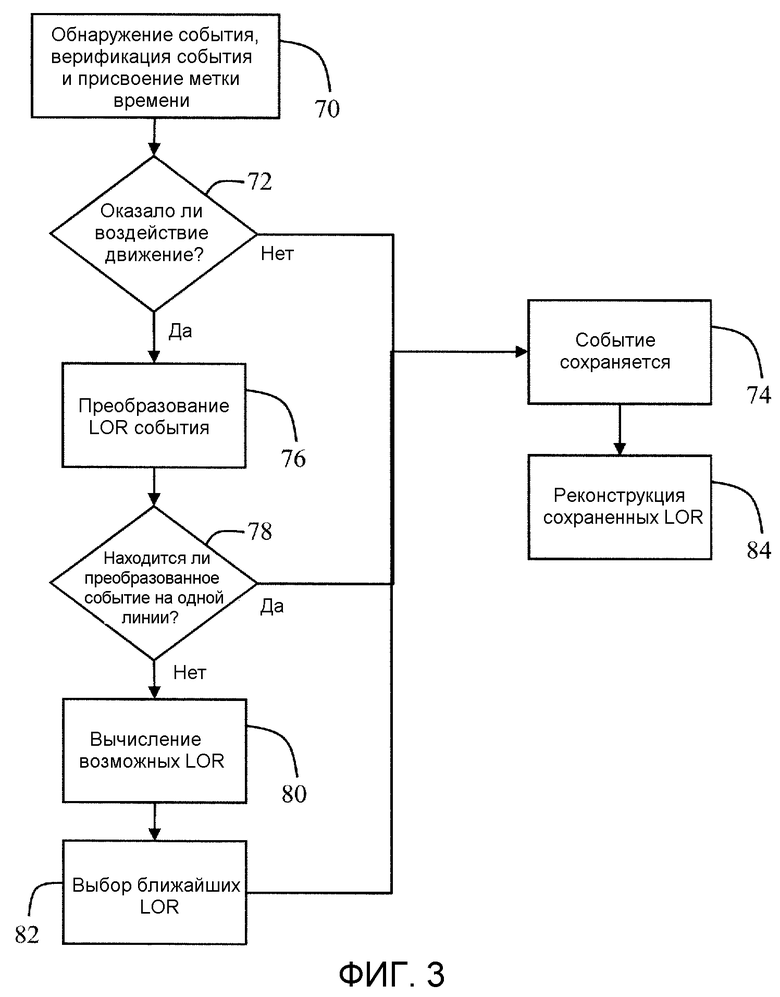
Фиг.2 представляет собой вид в разрезе туннеля (устройства визуализации), иллюстрирующий преобразованное событие и соответствующие вероятные линии отклика;
Фиг.3 представляет собой блок-схему, иллюстрирующую возможный вариант осуществления в соответствии с настоящей заявкой.
На Фиг.1, показано устройство 10 для диагностической визуализации, содержащее корпус 12 и опору 14 для пациента. Внутри корпуса 12 установлена детекторная матрица. Детекторная матрица включает в себя множество индивидуальных детекторных элементов 16. Тогда как один конкретный вариант осуществления описывается в отношении сканера позитронно-эмиссионной томографии (PET), необходимо учитывать, что настоящее изобретение также является применимым в области астрофизики, например, для телескопов для регистрации гамма-лучей, радиографического исследования, безопасности, промышленности, а также в других медицинских областях применения, таких как однофотонная эмиссионная компьютерная томография (SPECT) и рентгенография. Вообще, настоящая заявка находит применение в визуализации рентгеновского, гамма-излучения или других заряженных частиц, обладающих высокой энергией и пространственной разрешающей способностью. Матрица расположена так, что детекторные элементы 16 находятся непосредственно рядом с областью 18 сканирования. Детекторная матрица может представлять собой кольцо детекторных элементов 16, множество колец, одну или несколько отдельных, плоских или образующих дугу, панелей, или тому подобное. В позитронно-эмиссионной томографии (PET) пары гамма-лучей вызываются событием позитронной аннигиляции в области сканирования и распространяются в противоположных направлениях. Эти гамма-лучи определяются как пары, с небольшой временной разницей (порядка наносекунд) между их регистрацией, если один гамма-луч проходит дальше, чтобы достигнуть детектора, чем другой. Соответственно, в РЕТ-сканнерах детекторные матрицы обычно окружают область сканирования.
До того, как начинается РЕТ-сканирование, объекту вводится радиоактивный медицинский препарат. В одном обычном исследовании, радиоактивный медицинский препарат содержит радиоактивный элемент, соединенный с маркерной молекулой. Маркерная молекула соотнесена с областью, подлежащей визуализации, и стремится попасть в эту область путем обычных процессов организма или обмена веществ. Например, стремительно размножающиеся раковые клетки имеют свойство затрачивать чрезмерно высокие количества энергии, удваивая себя. Радиоактивный медицинский препарат может быть соединен с молекулой, такой как молекула глюкозы, которую клетка обычно метаболизирует для получения энергии, заставляя радиоактивный медицинский препарат скапливаться в таких областях и проявляться в качестве «горячих узлов» на изображении. Скорость, с которой поглощается (усваивается) радиоактивный медицинский препарат, и скорость, с которой глюкоза метаболизируется при обмене веществ и радиоактивный изотоп выводится (вымывается) как отход, также имеют диагностическое значение. Другие методики отслеживают меченые молекулы, движущиеся в кровеносной системе. Радиоактивные медицинские препараты, соединенные с йодом, частично поглощаются щитовидной железой. Другие молекулы абсорбируются в других органах или тканях.
Когда гамма-луч ударяет в детекторную матрицу, регистрируются расположение бомбардируемого детекторного элемента и время удара. Инициирующий процессор 20 отслеживает каждый детекторный элемент 16 на предмет всплеска энергии, например, интегрированной зоны под импульсом, характерной для энергии гамма-лучей, сгенерированных радиоактивным медицинским препаратом. Инициирующий процессор 20 сверяется с часами 22 и присваивает каждому обнаруженному гамма-лучу метку времени приема переднего фронта импульса. В РЕТ-визуализации, метка времени, оценка энергии и определение местоположения, в первую очередь, используются процессором 24 верификации событий для определения наличия совпадающего события. Принятые пары совпадающих событий определяют линии отклика (LOR). Поскольку гамма-лучи распространяются со скоростью света, если разница между обнаруженными гамма-лучами составляет более чем несколько наносекунд, вероятно, они не были сгенерированы одним и тем же событием аннигиляции и поэтому отвергаются. Формирование меток времени особенно важно во время-пролетной позитронно-эмиссионной томографии (TOF-PET), так как малейшая разница в, по существу, одновременных совпадающих событиях может быть использована для дальнейшего определения местоположения события аннигиляции вдоль линии отклика (LOR). Поскольку разрешение по времени событий становится более точным, повышается точность, с которой событие может быть локализовано вдоль его LOR.
В одном варианте осуществления опора 14 для пациента, помимо обеспечения поддержки объекта (пациента), также служит опорой для, по меньшей мере, одного датчика 26 движения. Датчики 26 движения позволяют обнаруживать и корректировать локальное движение. Рассматриваются любые из нескольких типов датчиков 26 движения. Датчики 26 движения регистрируют движение объекта и сообщают состояния движения в базу 28 обобщенных данных о движении. База 28 обобщенных данных о движении сверяется с часами 22 и сопоставляет время обнаружения и состояние движения. Движение может быть единичным событием, например, когда пациент произвольно двигается или смещается в области сканирования. Также движение может быть периодическим, как, например, движение, связанное с сердцебиением или дыханием. Дыхание вызывает локальное движение легочных узелков и соседних тканей. Компенсация данного локального движения приводит к лучшим стандартным значениям усвоения. В дополнение, движение легких может быть отображено за весь дыхательный цикл. В случае сердечного движения, может быть произведена компенсация движения сердца, которая в результате даст улучшенное выявление аномалий.
В одном варианте осуществления датчики 26 сообщают объем движения и то, на какую область или области объекта воздействует движение. Для отслеживания движения, связанного с сердцебиением объекта, могут быть использованы датчики ЭКГ или пульсовые датчики. Механические или ультразвуковые мониторы для измерения потока воздуха, поступающего в легкие и выходящего из них, механические или видеомониторы для измерения увеличения объема груди во время дыхания, либо другие дыхательные датчики могут использоваться для наблюдения за объемом и измерения времени дыхания объекта. Произвольное движение может отслеживаться посредством внешних датчиков движения, лазерных устройств выравнивания, видеокамер и тому подобных.
Хотя корректирование движения, исходящего от объекта, является одним способом применения, также возможны другие способы применения. Например, пользователь может выполнять мульти-модальную регистрацию изображений путем обработки данных в режиме списка. Другой способ применения включает в себя многообъектную регистрацию для различных частей тела. Пользователь может регистрировать 4D пакеты характеристик сердечной деятельности индивидуальных объектов на общей 4D матрице. Движение радиоактивного медицинского препарата может отслеживаться на основе известной модели. Также, система может корректировать дрожание камеры при SPECT-визуализации. Другие способы применения, разумеется, также возможны.
После того, как пара событий верифицирована процессором 24 верификации событий, LOR передается в процессор 30 преобразования событий, который сверяется с базой 28 обобщенных данных о движении, чтобы видеть, в каком состоянии движения произошло событие. Процессор 30 преобразования событий преобразует LOR из координат детекторного элемента действительного приема в преобразованное положение, где пара LOR, определяющих события, была бы воспринята в выбранном состоянии движения, например, состоянии покоя.
Линии отклика LOR (как преобразованные, так и не преобразованные) с их метками времени хранятся в буферной памяти 32 для хранения событий, а процессор 34 восстановления реконструирует LOR в виде изображения объекта, используя любой подходящий алгоритм восстановления. Реконструкция затем может быть отображена для пользователя на устройстве 36 отображения, распечатана, сохранена для последующего использования и т.д.
В одном варианте осуществления данные событий собираются в формате «списка». Запись соответствующих свойств (координат измерительного элемента, меток времени и т.п.) каждого обнаруженного события в список стала общепринятой практикой в области применения эмиссионной томографии и стала известной как сбор и хранение информации в виде списка. Методика восстановления в виде списка отличается в нескольких отношениях от способов реального времени, в которых каждая линия отклика LOR обратно спроецирована или используется иным образом в реконструкции в том порядке, в каком была принята и отвергнута. Сбор информации в виде списка обеспечивает чрезвычайно высокое временное разрешение с полным пространственным разрешением, позволяющее определять длительность кадров после сбора. При сборе данных в формате списка, местоположения измерительных элементов для каждого события могут быть сохранены с высокой степенью точности с большей эффективностью, чем достигается при сборе данных в кадровом режиме. Углы поворота гантри не должны группироваться в предопределенные кадры, но могут записываться как действительный угол, таким образом, устраняя воздействие углового размывания при непрерывном сборе данных. Действительная энергия взаимодействия (обмена данными) может быть зарегистрирована вместо причисления энергии события одному из ограниченного числа заранее установленных окон. При увеличении размерности таким способом, данные не группируются в матрицу, но зато сохраняются в списке и могут быть расположены и отсортированы по различным параметрам, например, по времени приема. Режим списка также может сохранять отпирающие сигналы без временного кадрирования данных до того, как данная информация станет полностью доступной. Результатом является значительное увеличение достоверности записи проекционных данных при сборе данных в режиме списка, без очень большого увеличения объема памяти. Еще одним преимуществом является возможность распознавать события по времени, когда они произошли, и, что является эффектом настоящей заявки, возможность соотнести данное время с событием движения.
Как упоминалось выше, процессор 30 преобразования событий сверяется, воздействует ли на какие-либо события проявление движения. Если событие излучения и выбранное состояние движения совпадают по времени, тогда процессор 30 преобразования событий преобразует LOR, соотнесенные с событием, чтобы компенсировать записанное движение. В настоящей заявке сохраняют данные в виде списка. В одном варианте осуществления данные в виде списка собирают и реконструируют в виде изображения, которое содержит артефакты движения. Изображение анализируется процессором 38 анализа изображения. Данные в виде списка, на которые воздействует движение, распознаются и преобразуются процессором 30 преобразования событий. Обновленные и преобразованные события заменяют старые события в буферной памяти 32 для хранения событий. Процессор 34 восстановления затем создает другое, обновленное изображение. Данный процесс может повторяться несколько раз, пока артефакты движения не будут сведены к минимуму либо пока не будет достигнут приемлемый уровень артефактов движения.
Предполагаются различные методики анализа. Например, расчетное движение периодически может использоваться для выбора возможных LOR для проверки потенциального преобразования. Сущность артефакта может быть проанализирована для определения возможных LOR. Возможные линии отклика LOR, случайные LOR или систематически выбираемые LOR могут быть исключены из реконструкции для определения того, уменьшились ли проявления артефактов. После того, как LOR, которая вызывает артефакты, будет идентифицирована, она подлежит преобразованию, корректируемому несколько раз для того, чтобы минимизировать артефакты. Другие многочисленные методики анализа изображения также рассматриваются.
В другом варианте осуществления измеряется движение и состояние движения сопоставляется с каждой LOR посредством базы 28 обобщенных данных о движении до реконструкции. Это дает выгодную возможность применения методики реконструкции в режиме списка, связанной с временной маркировкой каждого индивидуального события. В случаях, когда модель движения можно оценить до реконструкции, как, например, при наблюдении за сигналом ЭКГ и сердечным движением, линии LOR события изначально преобразуются до реконструкции. Таким образом, реконструкция продолжает линии LOR, позиционно преобразованные в выбранное состояние движение. Разумеется, изображения, основанные на таких предположительных моделях, по-прежнему подвержены артефактам движения. Соответственно, реконструированное изображение по-прежнему анализируется процессором 38 анализа изображения, чтобы скорректировать примененные преобразования и удалить такие артефакты движения.
Далее, что касается Фиг.2, а также еще в отношении Фиг.1, описывается преобразование линии LOR события. Парные гамма(γ)-лучи обнаруживаются от события 40 детекторными элементами 42 и 44, формирующими исходную LOR 46. После того, как событие было помечено меткой времени и верифицировано, процессор 30 преобразования событий информируется базой 28 обобщенных данных о движении и/или процессором 38 анализа изображения о том, совпадает ли событие 40 с движением. Если совпадает, процессор 30 преобразования событий перемещает событие 40 посредством преобразования 47 к месторасположению 48 преобразованного события, соответствующему выбранному состоянию движения, определяя преобразованную LOR 50 (пунктирная линия на Фиг.2).
Проблема, которая часто случается, как показано на Фиг.2, заключается в том, что преобразованная LOR 50 может не соответствовать геометрическим центрам новой пары детекторных элементов. Одним способом продолжать преобразование, наряду с сохранением достоверности данных в виде списка, является использование детекторных элементов 52, 54, которые находятся ближе всего к преобразованной LOR 50. Данный способ может применяться как для время-пролетного (TOF), так и для не время-пролетного сбора данных в виде списка.
Если доступна TOF-информация, предполагается усовершенствование описанного выше способа ближайшего детектора. Когда концы преобразованной LOR 50 не попадают точно в геометрические центры детекторных элементов, TOF-информация используется для того, чтобы установить точку эмиссии вдоль LOR 46 события непосредственно после приема и преобразовать в точку эмиссии вдоль преобразованной LOR 48. То есть гистограмма 56 местоположения для события 40 непосредственно после приема может быть преобразована в гистограмму 58 местоположения для преобразованного события 48.
Далее, распознаются центры детекторов (то есть детекторов 52 и 54), которые расположены ближе всего к преобразованной LOR 50, а также распознаются ближайшие соседние детекторы 60 (как по окружности, так и продольно). Рассчитываются прерывистые линии 62 LOR, которые соответствуют ближайшим детекторам 52, 54, и ближайшие соседние детекторы 60. Из данной группы возможных прерывистых линий 62 LOR выбирается LOR, наиболее близко пересекающая преобразованную точку 48 эмиссии. После того, как ближайшая возможная преобразованная LOR 62 выбрана, она сохраняется в буферной памяти для хранения событий и используется для реконструкции в надлежащее время.
В одном варианте осуществления описывается способ в отношении блок-схемы, представленной на Фиг.3. На этапе 70 событие обнаруживается как пара γ-лучей, верифицируется и помечается меткой даты/времени. На этапе 72 время и область события сверяются с обнаружением движения, чтобы видеть, воздействовало ли движение на событие. Если движение не воздействовало на событие, тогда событие непосредственно после приема передается на хранение для последующей реконструкции на этапе 74.
Если движение воздействовало на событие, преобразование, описывающее движение, применяется к событию на этапе 76. Это изменяет линию LOR непосредственно после приема в преобразованную LOR, которая компенсирует движение. Преобразованную LOR сверяют, чтобы видеть, не находится ли она на одной линии с новыми центрами 78 кристаллов. В том случае, когда преобразованная LOR не находится на одной линии с новыми центрами кристаллов, на этапе 80 создаются возможные линии LOR, которые соединяют ближайшие кристаллы с преобразованной LOR и их соседей между собой. В том случае, когда преобразованная LOR находится на одной линии с новыми центрами кристаллов, преобразованное событие сохраняется 74. После создания возможных линий LOR, на этапе 82 выбирается возможная LOR, которая ближе всех к местоположению события непосредственно после преобразования, и сохраняется 74. Время пролета (TOF) для преобразованного события также соответственно обновляется. TOF-информация корректируется посредством вычисления расстояний от местоположений 48 преобразованных событий до каждого из двух преобразованных кристаллов 52, 54 и подсчета разницы между этими двумя расстояниями. Затем результат делится на скорость света и квантуется для того, чтобы вписаться в соответственную систему отсчета. После того, как все события обработаны данным способом, применяется надлежащая реконструкция 84.
Данное изобретение было описано с учетом предпочтительных вариантов осуществления. Другие варианты могут быть изменены и дополнены по прочтении и изучении предшествующего подробного описания. Предполагается, что данное изобретение будет толковаться как включающее в себя все такие изменения и дополнения, насколько они находятся в пределах объема прилагаемой Формулы изобретения или ее эквивалентов.
Изобретение относится к области диагностической визуализации. Аппарат для диагностической визуализации, содержащий: детекторную матрицу, включающую в себя индивидуальные детекторные элементы (16), для приема событий излучения от области сканирования (18); инициирующий процессор (20) для присвоения метки времени воспринятым потенциальным событиям; процессор (24) верификации событий, который применяет критерии верификации к пикам канала измерительного элемента; процессор (30) преобразования событий, который преобразует воспринятые события и соответствующие линии отклика в пространственно смещенные преобразованные события; буферную память (32) для хранения событий в виде списка для хранения действительных событий, имеющих метку времени; процессор (34) восстановления для реконструирования действительных событий в виде изображения области (18) сканирования; и дополнительно содержащий: процессор (38) анализа изображения, который анализирует изображение, реконструированное процессором (34) восстановления, на предмет артефактов движения и распознает события излучения для преобразования процессором (30) преобразования событий; при этом анализ посредством процессора (38) анализа изображения применяется несколько раз с целью уменьшения артефактов в реконструированном изображении с каждым повтором. Технический результат - повышение качества изображения. 3 н. и 8 з.п. ф-лы, 3 ил.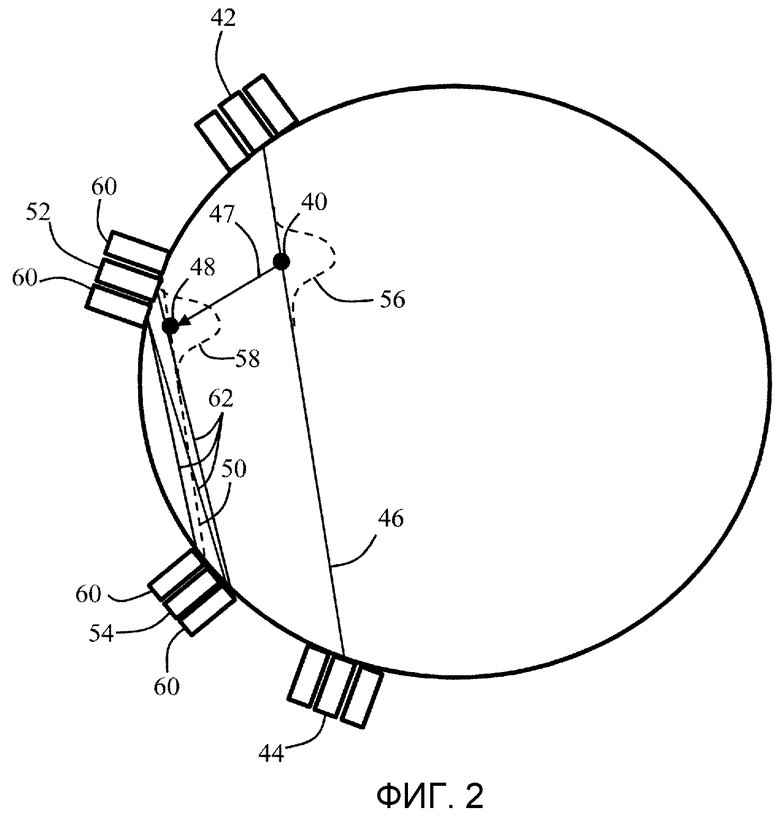
1. Аппарат для диагностической визуализации, содержащий:
детекторную матрицу, включающую в себя индивидуальные детекторные элементы (16), для приема событий излучения от области сканирования (18);
инициирующий процессор (20) для присвоения метки времени воспринятым потенциальным событиям;
процессор (24) верификации событий, который применяет критерии верификации к пикам канала измерительного элемента;
процессор (30) преобразования событий, который преобразует воспринятые события и соответствующие линии отклика в пространственно смещенные преобразованные события;
буферная память (32) для хранения событий в виде списка для хранения действительных событий, имеющих метку времени;
процессор (34) восстановления для реконструирования действительных событий в виде изображения области (18) сканирования; и
дополнительно содержащий: процессор (38) анализа изображения, который анализирует изображение, реконструированное процессором (34) восстановления, на предмет артефактов движения и распознает события излучения для преобразования процессором (30) преобразования событий;
при этом анализ посредством процессора (38) анализа изображения применяется несколько раз с целью уменьшения артефактов в реконструированном изображении с каждым повтором.
2. Аппарат для диагностической визуализации по п.1, в котором каждое верифицированное событие излучения распознается посредством соответствующей линии отклика, а процессор (30) преобразования событий:
преобразует линию отклика непосредственно после получения (46) в преобразованную линию отклика (50) и
распознает ближайшие детекторные элементы (52, 54), которые находятся ближе всех к конечным точкам преобразованной линии отклика (50).
3. Аппарат для диагностической визуализации по п.2, в котором процессор (30) преобразования событий:
распознает детекторные элементы (60), соседние с ближайшими детекторными элементами (52, 54), и
создает множество возможных линий отклика (62), которые соединяют ближайшие детекторные элементы (52, 54) и соседние детекторные элементы (60).
4. Аппарат для диагностической визуализации по п.3, в котором инициирующий процессор (20) генерирует время-пролетную информацию (56), соответствующую каждой линии отклика, причем процессор (30) преобразования событий преобразует местоположение (40) события, полученное из время-пролетной информации для создания преобразованного местоположения (48) события вдоль преобразованной линии отклика (50).
5. Аппарат для диагностической визуализации по п.4, в котором процессор (30) преобразования событий выбирает одну из множества возможных линий отклика (62), проходящих наиболее близко к преобразованному местоположению (48) события, и обновляет время-пролетную информацию для соответствия выбранной возможной линии отклика.
6. Аппарат для диагностической визуализации по любому из пп.2-5, в котором: процессор (38) анализа изображения анализирует изображение, реконструированное процессором восстановления, на предмет артефактов движения и применяет, по меньшей мере, одно корректирование к процессору (30) преобразования для уменьшения артефактов движения.
7. Способ диагностической визуализации, содержащий:
получение потенциальных событий излучения от области (18) сканирования;
присвоение метки времени воспринятым потенциальным событиям;
применение критериев верификации для обнаружения потенциальных событий;
применение преобразований, при необходимости, чтобы преобразовать верифицированные события и соответствующие линии отклика в выбранное состояние движения;
хранение действительных событий, имеющих метку времени; и
реконструирование действительных событий в виде изображения области (18) сканирования, и дополнительно содержащий:
анализ реконструированного изображения на предмет артефактов движения, и
многократное корректирование преобразований, примененных к некоторым линиям отклика, для уменьшения артефактов движения.
8. Способ по п.7, дополнительно содержащий:
распознавание детекторных элементов (52, 54), которые находятся ближе всех к конечным точкам каждой преобразованной линии отклика (50);
распознавание детекторных элементов (60), соседних с детекторными элементами (52, 54), ближайшими к конечным точкам; и
создание множества возможных линий отклика (62), которые соединяют ближайшие детекторные элементы (52, 54) и/или соседние детекторные элементы (60).
9. Способ по п.8, дополнительно содержащий:
получение местоположений событий (40) вдоль соответствующих линий отклика (46) из время-пролетной информации (56);
на этапе преобразования преобразование местоположения (40) события в преобразованное местоположение (48) события; и
выбор одной из множества возможных линий отклика (62), проходящих наиболее близко к преобразованному местоположению (48) события.
10. Способ по любому из пп.7-9, дополнительно содержащий:
обнаружение событий движения объекта в области (18) сканирования;
обобщение обнаруженных событий движения и присвоение им времени или диапазона времени, в пределах которого произошло каждое событие движения; и
сопоставление по времени воспринятых событий и обнаруженного движения.
11. Машиночитаемый носитель, содержащий программное обеспечение, которое контролирует процессор компьютера для выполнения способа по любому из пп.7-10.
| WO 2006134332 A2, 21.12.2006 | |||
| US 20080116386 A1, 22.05.2008 | |||
| US 20030128801 A1, 10.07.2003 | |||
| Гамма-камера | 1977 |
|
SU753427A1 |

