Изобретение относится к области судостроения, в частности к подводной технике освоения минеральных ресурсов глубоководных частей Мирового океана, предназначенной для отработки поверхностных, россыпных месторождений твердых полезных ископаемых.
Известны следующие варианты систем добычи железомарганцевых конкреций:
- «добывающее судно + транспортный трубопровод + буфер-накопитель + механическая гибкая связь + самоходный агрегат сбора». Этот вариант используется при непрерывной отработке продуктивных участков месторождения ЖМК;
- «добывающее судно + механическая гибкая связь + самоходный агрегат сбора». Этот вариант используется при дискретной отработке продуктивных участков месторождения ЖМК.
Известно устройство по патенту РФ №1750304 « Установка для подъема полезных ископаемых со дна океана», содержащая трубный став и основную и дополнительную гибкие тяги, соединенные между собой специальными перемычками. При обрыве трубного става секции повисают на гибких тягах, чем обеспечивается надежность функционирования системы подъема, снижение действующих динамических нагрузок. К недостаткам установки следует отнести действие вертикальных сил, передающихся на агрегат сбора, и необходимость буксировки им гибкой связи.
Наиболее близким по совокупности существенных признаков и принятым за прототип является техническое решение по патенту США №4232903 «Морская добычная система и процесс», содержащее добычное судно, самоходный агрегат сбора (САС), соединенный с трубопроводом гибкой связью. Гибкая механическая связь (далее «гибкая связь»), в свою очередь, подключена к нижнему концу трубопровода через буфер-накопитель, предназначенный не только для временного хранения ЖМК, но и как компенсатор динамического воздействия возникающих нагрузок на подводные добычные устройства (гибкую связь и самоходный агрегат сбора). К недостаткам системы следует отнести ограниченность зоны обрабатываемого продуктивного участка месторождения, определяемой зависимостью от длины гибкой связи, и требуется значительная энерговооруженность агрегата сбора, необходимая для буксировки гибкой связи.
Существующие научно-технические решения укладываются в схемы, при которых отсутствуют технологические мероприятия, позволяющие САС затрачивать свой энергетический потенциал исключительно на процесс выемки руды и ее подачу в гибкий трубопровод, а также на перемещение по заданной траектории месторождения с максимальной степенью свободы. Агрегат сбора дополнительно вынужден расходовать значительную энергию на буксировку гибкой связи во всех ее эксплуатационных состояниях. Возникающие напряженно-деформирующие нагрузки в гибкой механической связи оказывают непосредственное воздействие на агрегат сбора, подсоединенный к гибкой связи на одном конце, и на систему подъема, подключение к которой на другом ее конце может быть осуществлено через буферное устройство. Наиболее критичными являются вертикальные составляющие динамических внешних и внутренних возмущающих сил. Действие этих вертикальных сил передается на САС. При этом, чем больше длина механической гибкой связи, скорость буксировки и течения, тем больше величина суммарной возмущающей вертикальной силы.
Так, по данным китайских специалистов (Qingjue Han, Shaojun Liu, Yu Dai, Xioorhou Hu) величина возмущающей вертикальной силы в системе «механическая гибкая связь + САС» достигает величины 40 кН. Если вес в воде САС составляет 100 кН, что характерно для большинства САС, спроектированных к настоящему времени в различных странах, то доля вертикальной силы может достигать 40% от веса САС в воде. Это может привести к заваливанию в грунт, уменьшению тяги и осадке САС.
Технологическую схему отработки продуктивного участка месторождения агрегатом сбора необходимо разрабатывать с учетом динамических нагрузок, передающихся от буфера через гибкую связь на сам агрегат сбора. При этом пространственное положение буфера, размещенного на конце трубной системы подъема, определяется как способностью судна удерживать добычной комплекс в заданных координатах, так и величиной перепада высот рельефа дна. Стабильность работы САС и системы «буфер-накопитель + механическая гибкая связь + САС» в целом нарушается.
Предлагаемое техническое решение призвано обеспечить: заданную эффективность выборки ЖМК при минимальных энергетических затратах; надежность функционирования системы за счет снижения влияния динамических нагрузок на систему транспортировки пульпы вдоль всех участков пути ее прохождения; управляемое формирование пространственного положения гибкой механической связи.
Узловым звеном системы добычи ЖМК является механическая гибкая связь, обеспечивающая взаимодействие самоходного агрегата сбора с другими частями добычной системы и реализацию технологической схемы отработки продуктивных участков месторождения.
Гибкая связь обеспечивает механическую связь элементов добычной системы и предназначена для транспортировки пульпы, а также для передачи энергии и информации. Механическая гибкая связь имеет положительную плавучесть, которая обеспечивается элементами плавучести, размещенными на гибком пульпопроводе.
Существуют два варианта исполнения механической гибкой связи по размещению элементов плавучести:
а) 1-й вариант. Распределенная система элементов плавучести.
При распределенной системе элементы плавучести равномерно размещены вдоль всей длины механической гибкой связи. При расположении самоходного агрегата сбора и буфера-накопителя на определенном расстоянии друг от друга такое размещение обеспечивает формирование пространственной формы механической гибкой связи, практически близкой к прямой линии.
б) 2-й вариант. Сосредоточенная система элементов плавучести.
Здесь сила плавучести создается одним блоком плавучести, расположенным в одной точке верхней части механической гибкой связи, между добывающим судном и самоходным агрегатом сбора. Такое расположение обеспечивает формирование пространственной формы механической гибкой связи в виде S-образной кривой.
Технический результат достигается за счет того, что в состав системы добычи ЖМК, содержащей добычное судно, транспортный трубопровод, буфер-накопитель, САС, соединенный с транспортным трубопроводом гибкой связью через буфер-накопитель, дополнительно входит необитаемый подводный аппарат (НПА) с пространственным вектором тяги, оборудованный гидроакустическими системами и системой визуального обзора. Причем механическая гибкая связь между буфером-накопителем, НПА и самоходным агрегатом сбора разделяется на две части. В состав верхней части механической гибкой связи, расположенной между НПА и буфером-накопителем, входит сосредоточенная система элементов плавучести. В состав нижней части гибкой связи, расположенной между НПА и САС, входит распределенная система элементов плавучести.
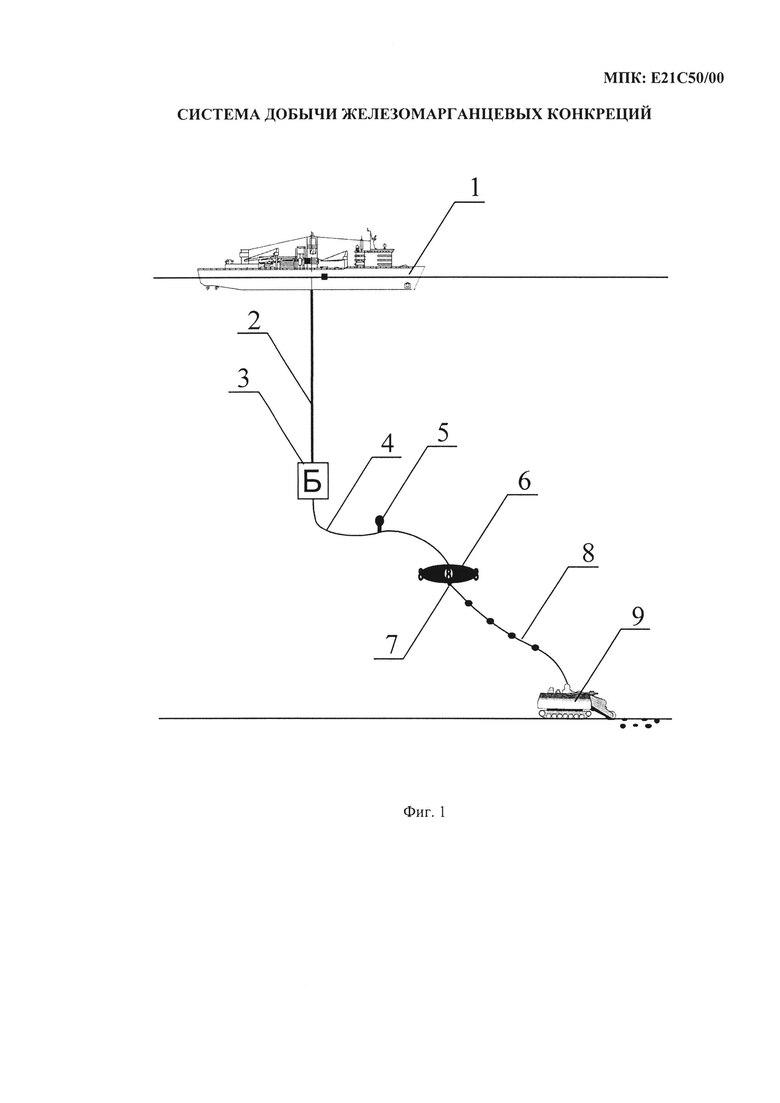
Сущность изобретения поясняется чертежом.
На фиг. 1 изображено: добывающее судно - 1; транспортный трубопровод - 2; буфер-накопитель - 3; верхняя часть механической гибкой связи с сосредоточенной системой элементов плавучести - 4; единый блок плавучести - 5; необитаемый подводный аппарат (НПА) - 6; нижняя часть механической гибкой связи с распределенной системой элементов плавучести - 7; элементы плавучести - 8; самоходный агрегат сбора (САС) - 9.
Добывающее судно (1) предназначено для обеспечения работы добычной установки, устройств отделения ЖМК от вмещающих пород и ликвидации отходов.
Транспортный трубопровод (2) предназначен для транспортировки пульпы (ЖМК + грунт) от буфера-накопителя (3) на добывающее судно (1).
Буфер-накопитель (3) предназначен для накопления ЖМК и организации подачи пульпы (ЖМК + грунт) в транспортный трубопровод (2) с постоянной производительностью. Постоянная производительность подачи ЖМК обеспечивает снижение динамических колебаний вертикальной внутренней возмущающей силы.
Верхняя часть механической гибкой связи с сосредоточенной системой элементов плавучести (4) - единым блоком плавучести (5), предназначена для формирования пространственной формы механической гибкой связи в виде S-образной кривой и расположена между буфером-накопителем (3) и НПА (6).
Необитаемый подводный аппарат (6) предназначен для:
- компенсации возмущающих воздействий придонных течений и устойчивого движения по заданной траектории
- перемещения, нижней части механической гибкой связи с распределенной системой элементов плавучести (7) и САС (9) в одной вертикальной плоскости, создавая тем самым наиболее благоприятные условия для работы САС (9);
- компенсации вертикальной силы, возникающей в системе «добывающее судно + буфер-накопитель + верхняя часть механической системы с сосредоточенными элементами плавучести + НПА», предотвращая тем самым влияние этой силы на пространственное положение САС (9);
- создания буксировочного усилия для буксировки нижней части механической гибкой связи (7) с распределенными элементами плавучести (8).
НПА расположен между верхней и нижней частями механической гибкой связи и имеет нулевую плавучесть. Движители, расположены в диаметральной горизонтальной плоскости по внешнему периметру корпуса НПА попарно на его главных взаимно перпендикулярных осях. Каждый движитель обеспечивает создание регулируемого по величине вектора тяги в одной плоскости с возможностью изменения направления вектора тяги на 360°. Четыре движителя создают пространственный вектор тяги, который позволяет двигаться НПА в любых направлениях, как в горизонтальной, так и в вертикальной плоскостях. Обеспечивается автоматическое управление пространственным вектором тяги.
На НПА (6) устанавливаются гидроакустические навигационные системы, гидролокаторы переднего, вертикального и кормового обзора и телевизионная система вертикального обзора. Гидроакустические навигационные системы обеспечивают определение координат местоположения элементов системы «буфер-накопитель (3) + НПА (6) + САС(9)» и их взаимное расположение. Гидролокаторы обзора предназначены для получения акустической информации об обстановке и состоянии поверхности дна в зонах, расположенных перед и за САС, и непосредственно в зоне, расположенной под НПА. Гидролокаторы предназначены для акустической съемки поверхности дна при работе во взмучиваемом слое воды в реальном времени. Получение визуальной информации обеспечивается телевизионной системой, расположенной в зоне под НПА. Величина отстояния НПА (6) от дна не зависит от перепада высот рельефа дна на месторождении ЖМК и определяется исходя из требуемой точности определения координат месторасположения и разрешающей способности гидроакустических систем, а также условий обеспечения получения визуальной информации. Это позволяет корректировать установленную траекторию движения агрегата сбора так, чтобы обеспечивалась рациональная отработка площади продуктивного участка с минимальными потерями продуктивной площади. Обеспечивается также контроль движения САС по заданной траектории и определение возможности возникновения опасной или аварийной ситуации. Высокая маневренность НПА (6) позволяет предотвратить наступление аварийных ситуаций.
Работа предлагаемого изобретения заключается в следующем: после проведения спускоподъемных операций система «буфер-накопитель (3) + НПА(6) + САС(9)» располагается в одной вертикальной плоскости. Проводится анализ обстановки и состояния поверхности дна и, при необходимости, производится корректировка траектории движения системы.
При выполнении добычных работ НПА (6) производит:
- непрерывный контроль относительного расположения элементов системы «буфер-накопитель + единый блок плавучести + нижняя часть механической гибкой связи (7) с распределенной системой элементов плавучести (8) + САС (9)»;
- контроль за обстановкой и состоянием поверхности дна при движении как в зоне, находящейся перед САС(9), так и в зоне отработанной полосы.
Информация поступает оператору, управляющему работой добычной установкой, на добывающее судно (1).
Таким образом, использование заявляемого изобретения обеспечивает:
- рациональную отработку продуктивного участка залежи ЖМК и сокращение непродуктивных потерь времени ведении добычных работ;
- автономность работы самоходного агрегата сбора;
- стабильность работы и заданного пространственного положения самоходного агрегата сбора;
- компенсацию вертикальных внешних и внутренних возмущающих сил;
- минимальные значения тяго- и энерговооруженности буксирующего элемента системы «буксирующий элемент + механическая гибкая связь + САС»;
- отсутствие затрат энергии на буксировку механической гибкой связи самоходного агрегата сбора;
- возможность предотвращения опасности возникновения аварийных ситуаций;
- минимизацию негативного воздействия процесса добычи на окружающую среду;
- контроль взаимного пространственного положения элементов системы добычи;
- полноту выемки ЖМК и контроль движения самоходного агрегата сбора при ведении добычных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ ДОБЫВАЮЩИЙ АППАРАТ И СПОСОБ ЕГО РАБОТЫ | 2008 |
|
RU2371580C1 |
| ПРОМЕЖУТОЧНАЯ КАПСУЛА ДЛЯ ПОДЪЕМА ТВЕРДЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА МИРОВОГО ОКЕАНА | 2022 |
|
RU2779867C1 |
| Способ добычи железомарганцевых конкреций со дна океана с глубин до 5 км и более и устройство для его осуществления | 2019 |
|
RU2715108C1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2595048C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ | 2013 |
|
RU2549303C2 |
| АГРЕГАТ ДЛЯ ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2000 |
|
RU2181838C2 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ПРИ РАЗРАБОТКЕ МЕСТОРОЖДЕНИЙ НА ДНЕ МОРЯ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2026491C1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ РОССЫПЕЙ | 2004 |
|
RU2280165C1 |
Изобретение относится к горному делу и может быть применено для освоения минеральных ресурсов дна морей и океанов при отработке поверхностных россыпных месторождений твердых полезных ископаемых. Система содержит добывающее судно, самоходный агрегат сбора, соединенный с трубопроводом гибкой связью, подключенной к нижнему концу трубопровода добывающего судна, транспортный трубопровод, буфер-накопитель. При этом система дополнительно снабжена необитаемым подводным аппаратом с пространственным вектором тяги, оборудованным гидроакустическими системами и системой визуального обзора, где в верхнюю часть механической гибкой связи включена сосредоточенная система элементов плавучести, а в состав нижней части механической гибкой связи, расположенной между необитаемым подводным аппаратом и самоходным агрегатом сбора, входит распределенная система элементов плавучести. Технический результат заключается в повышении эффективности выборки железомарганцевых конкреций и надежности функционирования системы. 1 з.п. ф-лы, 1 ил.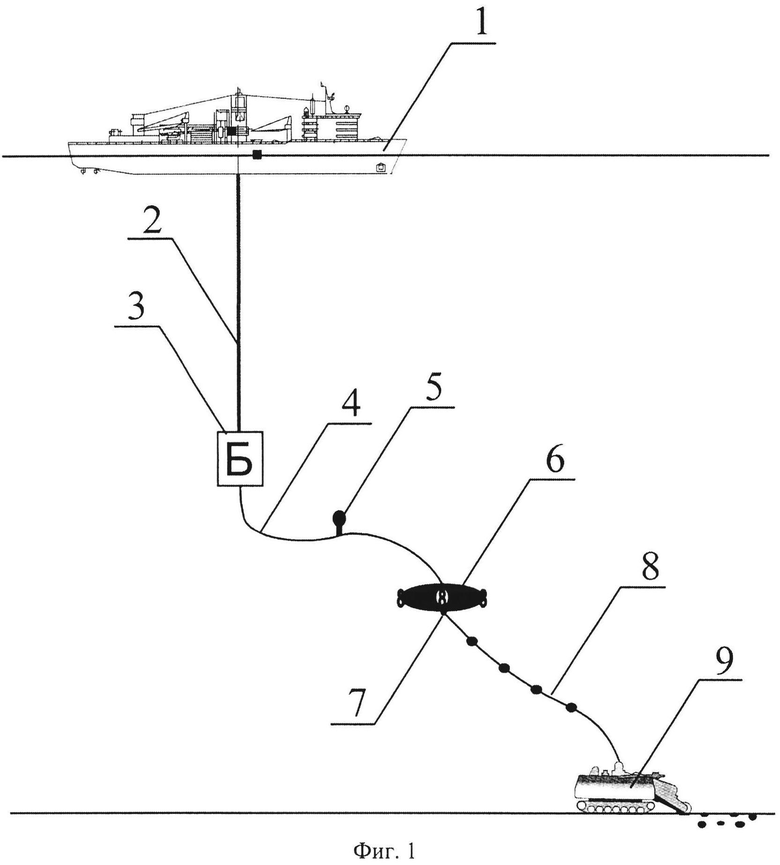
1. Система для добычи железомарганцевых конкреций, содержащая добывающее судно, самоходный агрегат сбора, соединенный с трубопроводом гибкой связью, подключенной к нижнему концу трубопровода добывающего судна, транспортный трубопровод, буфер-накопитель, отличающаяся тем, что в систему дополнительно входит необитаемый подводный аппарат с пространственным вектором тяги, оборудованный гидроакустическими системами и системой визуального обзора.
2. Система для добычи железомарганцевых конкреций по п.1, отличающаяся тем, что в верхнюю часть механической гибкой связи, расположенной между буфером-накопителем и необитаемым подводным аппаратом, включена сосредоточенная система элементов плавучести, а в состав нижней части механической гибкой связи, расположенной между необитаемым подводным аппаратом и самоходным агрегатом сбора, входит распределенная система элементов плавучести.
| US 4232903 A, 11.11.1980 | |||
| УСТРОЙСТВО ДЛЯ ГЛУБОКОВОДНОЙ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 1989 |
|
SU1739704A1 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ КОНКРЕЦИЙ | 2003 |
|
RU2244128C1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ С ШЕЛЬФОВОЙ ЗОНЫ МИРОВОГО ОКЕАНА | 2009 |
|
RU2405110C1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО | 2012 |
|
RU2517288C1 |
| ДРОБАДЕНКО В.П | |||
| и др | |||
| Методика и техника морских геологоразведочных и горных работ, Волгоград, Ин-Фолио, 2010, с.294, рис | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

