Изобретение относится к горной (горно-морской) промышленности, касается аппаратов и устройств, предназначенных для разработки на дне моря месторождений полезных ископаемых, и может найти применение в народном хозяйстве при промышленном освоении минерально-сырьевых ресурсов Мирового океана.
Наиболее эффективно использование изобретения при глубоководной (свыше 1000 м) добыче россыпных месторождений полиметаллических руд, преимущественно железомарганцевых конкреций (ЖМК), совместно с гидроподъемной установкой, в составе плавучего морского горнодобывающего комплекса /1/.
Известен самоходный на гусеничном ходу глубоководный (до 4500 м) добычной аппарат западногерманской фирмы «Демаг», связанный пульпопроводом с гидроподъемной установкой. Аппарат имеет всасывающую трубу с землесосом и рабочий орган со скребками (/2/, стр.74-75, рис.51).
Известно буксируемое по поверхности морского дна надводным судном добычное устройство с опорно-посадочной частью в виде саней длиной около 7 м и шириной 3 м. Добычное устройство содержит связанную гибким пульпопроводом с подъемным трубопроводом всасывающую трубу с землесосом и рабочий орган в виде установленных между полозьями саней гребенок (/2/, стр.76, рис.52, стр.145).
Недостатками известных самоходных или буксируемых по поверхности морского дна добычных аппаратов-аналогов являются:
- ограниченная шириной захвата рабочего органа производительность; так, для рентабельности добычи (порядка 300 т/ч) при концентрации ЖМК, равной 10 кг на квадратном метре поверхности морского дна, при скорости движения аппарата 0,5 м/с минимальная ширина захвата должна составлять не менее 15 м; при такой и большей ширине захвата трудно обеспечить надежность конструкции и эффективность работы (качество разработки по всей ширине захвата, тем более при неровной поверхности и неравномерном распределении полезного ископаемого по поверхности дна);
- повышенная экологическая опасность разработки, связанная с загрязнением окружающей морской среды и повреждением поверхности морского дна.
Известны подводные добычные аппараты, оборудованные средствами защиты окружающей морской среды от загрязнения при проведении донных земляных работах, а также защитные экраны, выполненные в виде отдельных сборно-разборных (с помощью водолазов) щитовых секций с пленкой из армированного полимерного материала /3, 4/.
Недостатки этих известных средств экологической защиты - неприспособленность их к применению в условиях глубоководной добычи полезных ископаемых (ЖМК).
Наиболее близким к описываемому добычному аппарату может являться известное функционирующее совместно с гидроподъемной установкой устройство для глубоководной добычи железомарганцевых конкреций (ЖМК), описанное в /5/.
Данное устройство-прототип включает подводную опору в виде жестко прикрепленной к нижнему концу подъемного трубопровода гидроподъемной установки платформы и установленный на ней донный добычной агрегат, содержащий закрепленную на этой платформе горизонтально расположенную прочную трубу-пульпопровод и установленные на ней на связанных с ней гибких пульпопроводах, служащих одновременно силовыми элементами, выемочные модули с рабочими органами и донными опорными элементами.
Горизонтальная труба-пульпопровод удерживается вдоль подводной платформы буксировочными канатами размещенных на ней тяговых лебедок. Через установленный на платформе бункер горизонтальная труба связана гибким пульпопроводом с подъемным трубопроводом гидроподъемной установки.
Каждый выемочный модуль выполнен в виде коробчатого черпака с плоским поддоном.
Рабочий орган выемочного модуля состоит из корпуса коробчатого черпака с поддоном, набора поставленных на ребро пластин-рыхлителей и патрубка, связанного гибким пульпопроводом с горизонтальной трубой.
Выемочные модули установлены на опорах-салазках с возможностью поворачиваться в зависимости от рельефа разрабатываемой поверхности дна.
Донное опорно-посадочное устройство в целом состоит из установленных на горизонтальной трубе лыж и салазок выемочных модулей.
Устройство-прототип не содержит никаких средств экологической защиты окружающей морской среды от загрязнения при разработке.
Прототип оснащен гидролокаторами фронтального обзора, эхолотами, сканирующими рельеф поверхности дна, телекамерами, другими устройствами, передающими по кабелю информацию на пульт (центр) управления.
Работа добывающего устройства-прототипа состоит в следующем.
На основании показаний подводных приборов горизонтальная труба добычного агрегата с помощью лебедок устанавливается над разрабатываемой поверхностью морского дна на расчетной рабочей высоте, выемочные модули на салазках размещаются на поверхности дна вдоль горизонтальной трубы, и вся эта многосвязная конструкция совместно с подводной платформой буксируется надводным судном в заданном направлении.
В процессе волочения выемочных модулей короба черпаков сгребают с поверхности дна разрыхленные (разбуженные) пластинами-рыхлителями твердые частицы ископаемого материла (ЖМК), и по гибким пульпопроводам всасываемая из черпаков гидросмесь направляется в общую горизонтальную трубу, а из нее - в бункер-накопитель, и далее - в подъемный трубопровод.
Небольшие препятствия преодолеваются за счет подтягивания канатами горизонтальной трубы и выемочных модулей к подводной платформе, а преодоление значительных препятствий осуществляется за счет подъема подводной платформы и обноса всей добычной системы над этими препятствиями.
Недостатками данного добычного устройства-прототипа и способа его работы, которые устраняются описываемым изобретением, являются:
- громоздкость пространственно разветвленной, многосвязной канатами и гибкими пульпопроводами конструкции, что существенно снижает функциональную, технологическую и эксплуатационную надежность, управляемость и маневренность;
- недостаточно высокая эффективность работы, как из-за сложности приведения многосвязной системы в рабочее состояние и управления ей в процессе работы, так и из-за не рационального по технологии и не экономичного по энерго- и трудозатратам способа разработки, осуществляемого путем волочения неуправляемых выемочных модулей по пространству поверхности дна с рутинным сгребанием всего подряд (большая доля сгребания пустой породы, в особенности при неровной поверхности дна и при неравномерном распределении по ней полезного ископаемого);
- повышенная экологическая опасность, обусловленная значительным загрязнением окружающей морской среды (взмучивание воды и повреждение морского дна) на неоправданно большом пространстве.
В своей совокупности вышеперечисленные недостатки снижают эффективность, надежность и экологическую безопасность работы данного добычного устройства.
С целью повышения эффективности, надежности и экологической безопасности работы за счет упрощения и компактности конструкции, повышения надежности и качества разработки при снижении трудоемкости использования, улучшения управляемости и маневренности аппарата, а также снижения уровня загрязнения окружающей морской среды и повреждения морского дна и предлагается данное изобретение.
Поставленная цель достигается тем, что выемочные модули установлены на нижних оконечностях силовых ферм, установленных подвижно вокруг и вдоль прочной вертикальной всасывающей трубы, закрепленной на подводной гидроопоре с регулируемой положительной и отрицательной плавучестью.
При этом фермы и выемочные модули связаны с приводами с возможностью перемещения и поворота в радиальной плоскости и шагового поворота вокруг вертикальной всасывающей трубы, а также регулируемого продольного перемещения и поворота выемочных модулей относительно ферм.
А донное опорно-посадочное устройство выполнено состоящим из самой вертикальной всасывающей трубы и закрепленного на ее нижнем конце опорного элемента.
Компактность конструкции, отсутствие многочисленных шланговых и тросовых связей способствует повышению надежности, маневренности и управляемости аппарата.
Нежесткая связанность подводной гидроопоры с регулируемой плавучестью с подъемным трубопроводом гидроподъемной установки придает аппарату пространственную свободу и автономность, возможность производить выборочную (точечную) посадку, производить выборочную и более качественную добычу.
А буеобразность конструкции, в которой подводная плавучая гидроопора является поплавком, а скомпонованный вертикально добычной агрегат служит тяжелым центральным стержнем, обеспечивает повышенную остойчивость и динамическую устойчивость аппарата.
Применение в качестве донного опорно-посадочного устройства непосредственно функциональных элементов, а именно его всасывающей трубы, упрощает конструкцию, снижает ее металлоемкость.
В частном техническом решении силовые фермы верхними концами шарнирно подвешены по окружности на кольцевом ползуне, установленном на продольных направляющих подвижного патрубка с фланцем на нижнем конце, свободно надетого на вертикальную всасывающую трубу с опорой на выполненный на ее нижнем конце опорный фланец. Фермы шарнирно присоединены в своей средней части рычагами половинной длины ферм к фланцу подвижного патрубка.
При этом кольцевой ползун связан с приводом его перемещения по направляющим подвижного патрубка, а подвижной патрубок связан с приводом его шагового поворота вокруг вертикальной всасывающей трубы.
С целью образования непосредственно под всасывающей трубой компактного навала твердой массы и тем самым повышения эффективности всасывания гидросмеси опорный элемент выполнен в виде закрепленного на нижнем конце всасывающей трубы решетчатого контейнера.
При этом с целью повышения эффективности всасывания и концентрации твердого в гидросмеси выемочные модули по форме корпусов и по профилю их передних сгребающих частей выполнены и расположены друг относительно друга с возможностью образования в совокупности вокруг вертикальной всасывающей трубы замкнутой поверхности, а опорный решетчатый контейнер по форме и профилю выполнен сопряженным с этой замкнутой поверхностью.
В частности, выемочные модули выполнены в виде дугообразных с прямыми или со скошенными передними частями коробов, расположенных друг относительно друга по окружности с образованием в совокупности вокруг вертикальной всасывающей трубы замкнутой соответственно цилиндрической или конической поверхности.
А решетчатый опорный контейнер выполнен соответственно в виде цилиндра или усеченного кругового конуса.
В другом варианте выемочные модули выполнены в виде трапецеидальных со скошенными по плоскости передними частями коробов, расположенных друг относительно друга с образованием в совокупности вокруг вертикальной всасывающей трубы шестигранной конической поверхности.
А решетчатый контейнер выполнен в виде усеченной шестигранной пирамиды.
Выполнение решетчатого контейнера по форме образованной корпусами коробов выемочных модулей замкнутой поверхности обеспечивает плотный охват (обжим) его передними сгребающими частями корпусов коробов, выемочных модулей.
С целью выталкивания из коробов выемочных модулей сгребаемой ими массы в коробах шарнирно установлены прочные вертикальные стенки, выполненные по форме поверхности решетчатого контейнера и снабженные выступающими наружу рычагами, взаимодействующими с опорным фланцем вертикальной всасывающей трубы с возможностью их поворота и силового обжима решетчатого контейнера.
При этом с целью дробления твердых частиц за счет силового продавливания сгребаемой твердой массы через решетчатые ячейки и тем самым предотвращения засорения всасывающего трубопровода опорный контейнер выполнен с решеткой, образованной жесткими заостренными ребрами.
Это способствует повышению концентрации твердого в гидросмеси при всасывании, соответственно производительности.
С целью повышения эффективности процесса всасывания твердой массы из навала за счет пространственного распределения всасывания по объему решетчатого контейнера конец вертикальной всасывающей трубы внутри контейнера оборудован коллектором, по периметру которого установлены разнонаправленные всасывающие патрубки.
С целью копирования разрабатываемой поверхности приводы перемещения и поворота выемочных модулей относительно силовых ферм выполнены состоящими каждый из двух гидроцилиндров, корпуса которых закреплены на нижних оконечностях ферм, а штоки с помощью шарнирно-ползунного механизма присоединены к тыльным силовым элементам корпусов выемочных модулей, причем приводы связаны с управляющим органом с возможностью взаимосогласованного передвижения штоков гидроцилиндров.
Управляемое копирование поверхности дна оптимизирует процесс разработки и повышает его эффективность.
Привод перемещения и поворота силовых ферм в радиальной плоскости (соответственно перемещения выемочных модулей по разрабатываемой поверхности) выполнен состоящим из установленных на подводной гидроопоре вокруг вертикальной всасывающей трубы соосно с ней силовых гидроцилиндров, штоки которых установлены подвижно в выполненных в кольцевом ползуне дуговых прорезях с возможностью его перемещения вверх-вниз по направляющим подвижного патрубка.
В другом варианте привод перемещения и поворота силовых ферм в радиальной плоскости выполнен состоящим из установленных на кольцевом ползуне вокруг подвижного патрубка двигателей, взаимодействующих через зубчатые механизмы с выполненными зубчатыми его продольными направляющими с возможностью перемещения по ним вверх-вниз.
Привод шагового поворота силовых ферм (соответственно выемочных модулей) вокруг вертикальной всасывающей трубы выполнен состоящим из установленных на подводной гидроопоре вокруг подвижного патрубка реверсных шаговых двигателей с шестернями на валах, установленными в зацеплении с насаженным на верхний конец подвижного патрубка зубчатым колесом с возможностью его шагового поворота вокруг всасывающей трубы.
С целью защиты окружающей морской среды от загрязнения силовые фермы по длине и вокруг по периметру покрыты прочной синтетической пленкой-экраном, прикрепленной к фермам и по окружности к кольцевому ползуну с возможностью раскрытия в виде шатра при радиальном перемещении ферм от вертикальной всасывающей трубы к периферии и компактного складывания между фермами при их обратном перемещении.
В частности, синтетическая пленка-экран выполнена с продольными гофрами и прикреплена продольными стропами к фермам и по окружности кольцевого ползуна с помощью подвижных колец.
Описанная конструкция защитного экрана при своей простоте и компактности не требует для своей установки выполнения подводных работ.
Способ работы описываемого добывающего аппарата, включающий разработку с разрыхлением и сгребанием твердой массы ископаемого путем перемещения выемочных модулей по разрабатываемой поверхности, состоит в том, что разработку осуществляют на защищенной экраном круговой площади поверхности, перемещения выемочных модулей производят в радиальных направлениях от всасывающей трубы к периферии - при разрыхлении и в обратном направлении - при сгребании в решетчатый контейнер с одновременным дроблением твердых частиц о ребра его решетки и с периодическим шаговым поворотом их вокруг всасывающей трубы.
По сравнению с известным способом работы с фронтальным перемещением выемочных модулей по открытому пространству поверхности морского дна данный способ более рационален, экономичен, качественен и экологически безопасен в отношении загрязнения окружающей морской среды и повреждения морского дна.
При этом с целью повышения качества разработки ровной поверхности за счет поддержания постоянным заданного угла наклона выемочных модулей к разрабатываемой поверхности длину L1 и L2 штоков гидпроцилиндров привода перемещения и поворота выемочных модулей относительно ферм при их передвижении одновременно изменяют по законам:
L1=(h-s·Sin(α))/Cos(β)+Tg(β);
L2=L1-d·Tg(β-α),
где β - текущий угол наклона фермы к разрабатываемой поверхности;
α - заданный постоянный угол наклона выемочного модуля;
s - длина корпуса выемочного модуля;
d - расстояние между штоками гидроцилиндров приводов перемещения и поворота выемочных модулей.
h - расстояние между горизонталью прямолинейного перемещения конца фермы и уровнем разрабатываемой поверхности.
Этот закон может быть просто реализован в автоматическом режиме с помощью известных технических средств.
Изобретение поясняется на следующих чертежах.
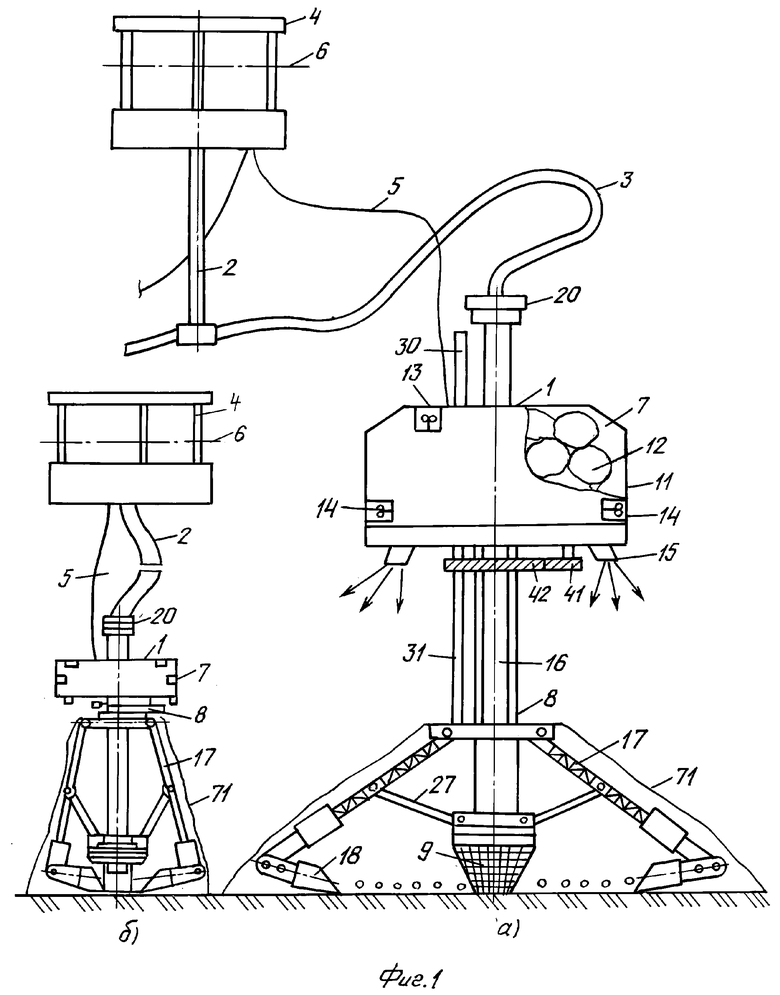
На фиг.1а, б показан общий вид описываемого добывающего аппарата.
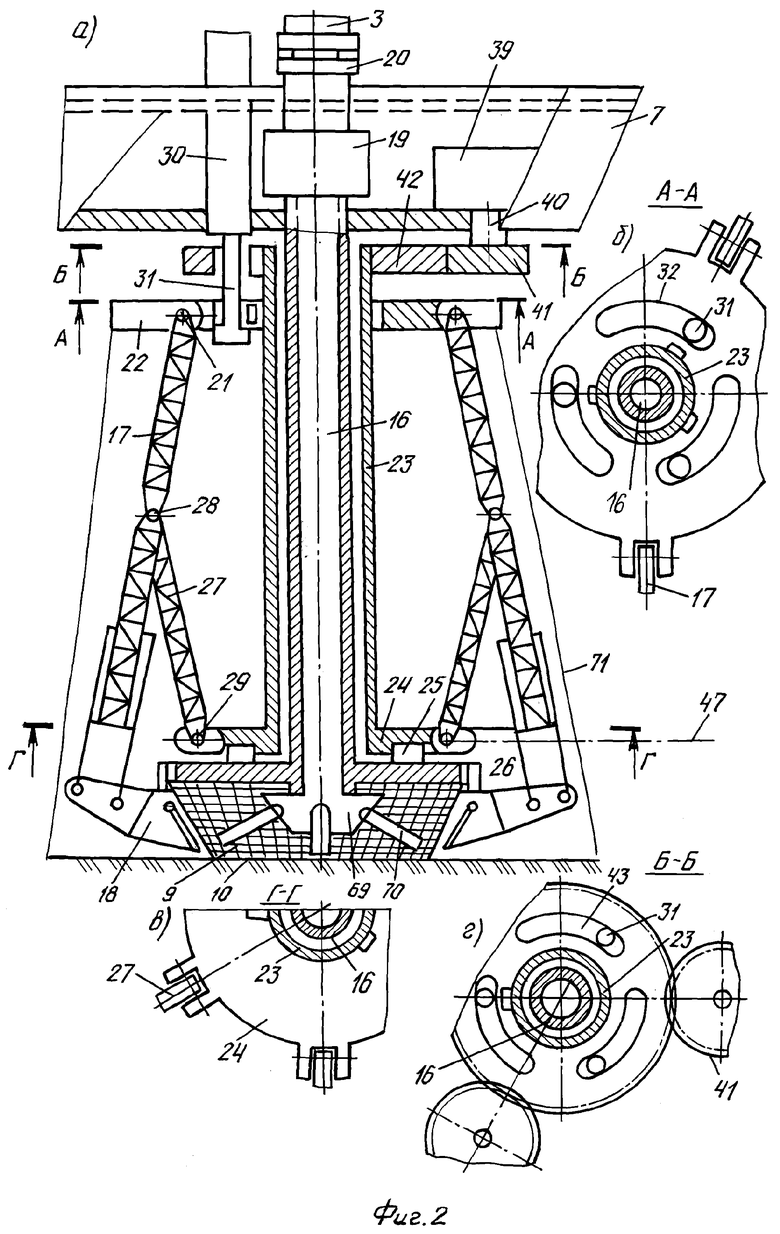
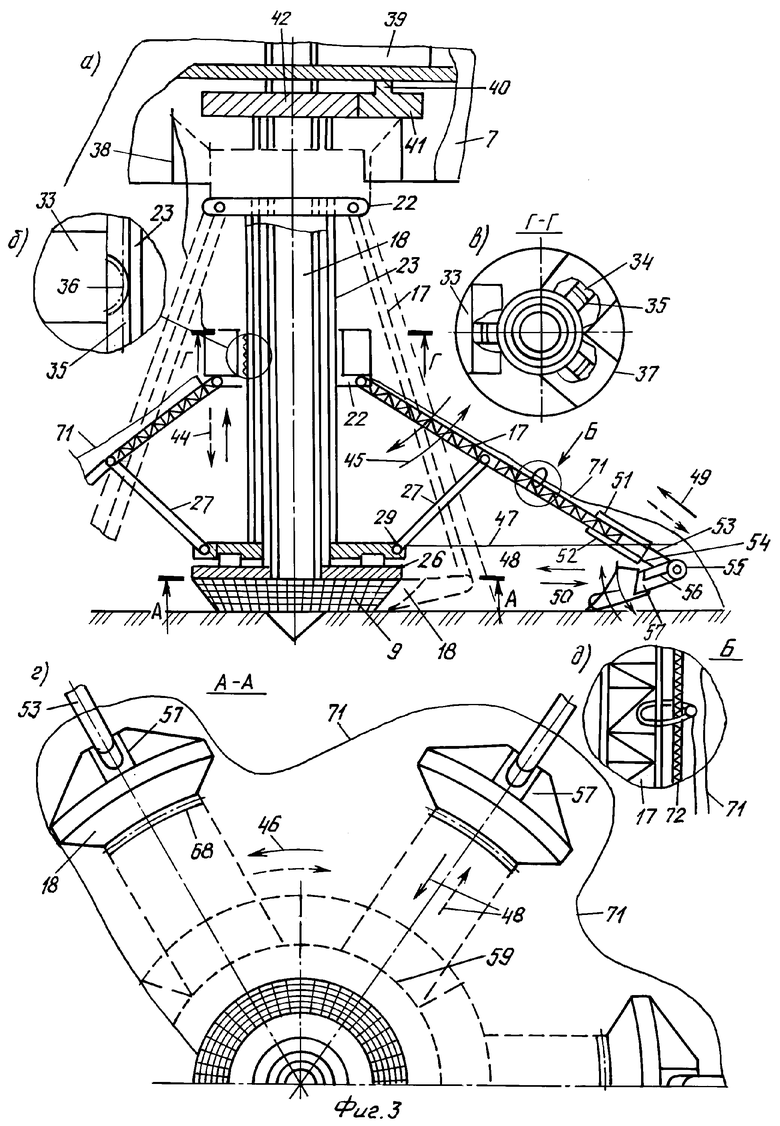
На фиг.2, 3 показана конструкция донного добычного агрегата.
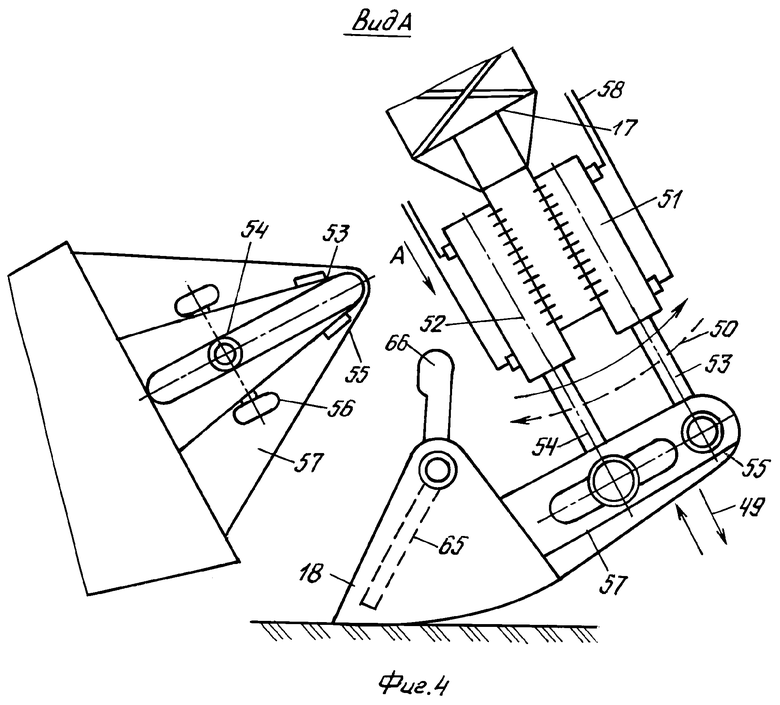
На фиг.4 показан конструкции привода выемочного модуля.
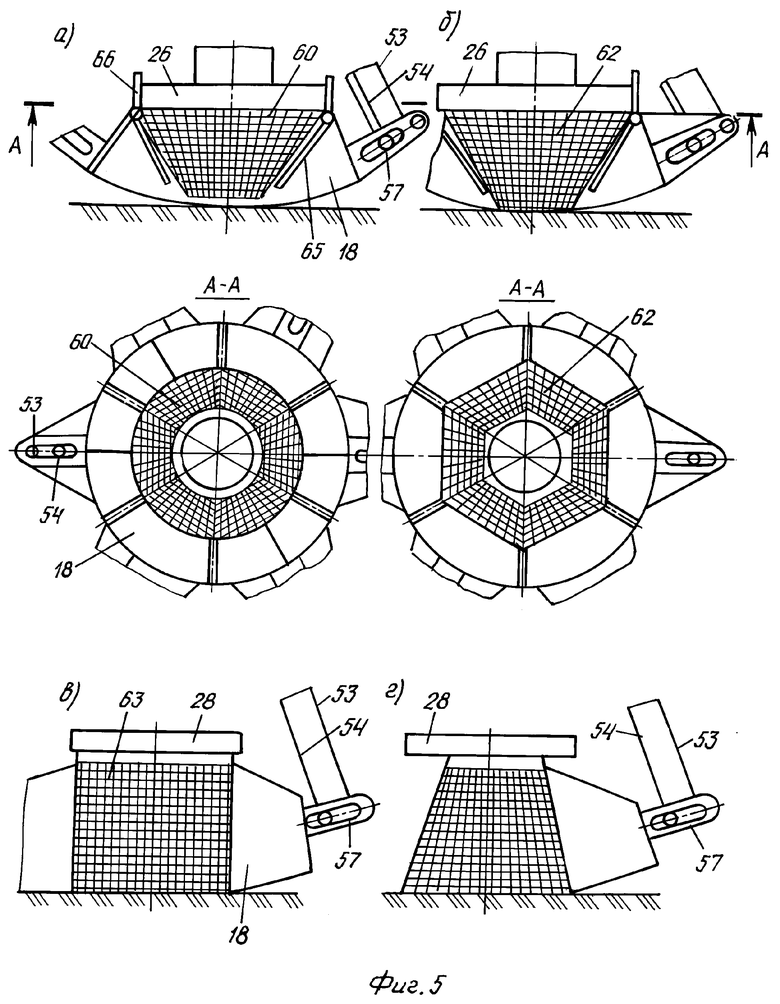
На фиг.5а, б, в, г показаны варианты конструкций выемочного модуля и опорного контейнера.
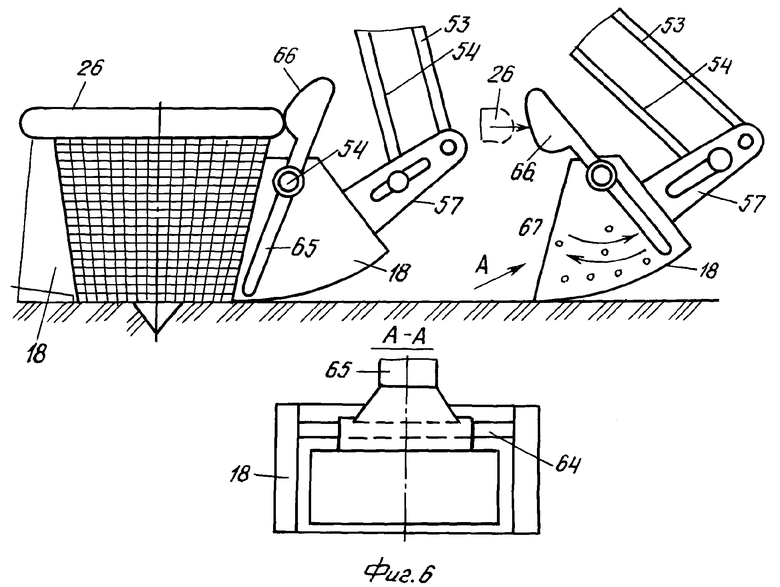
На фиг.6 показана конструкция устройства для выдавливания из короба выемочного модуля и дробления твердой массы ископаемого.
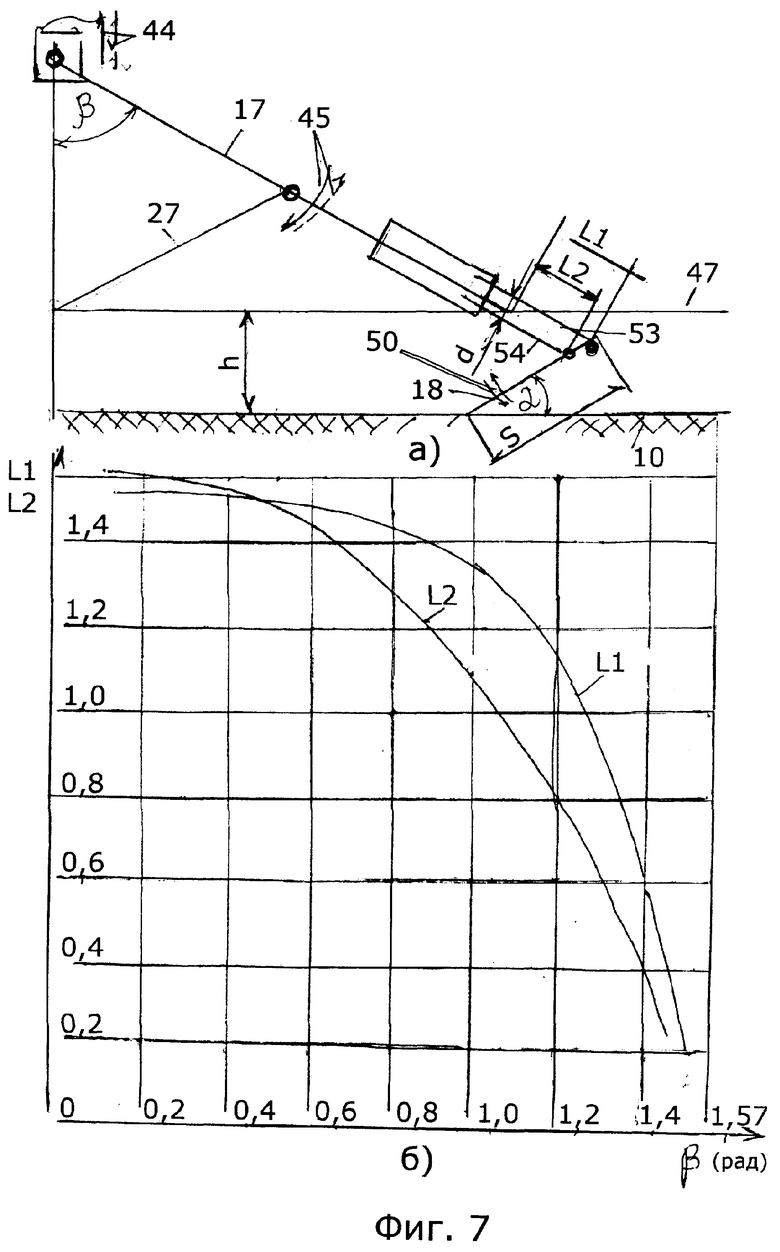
На фиг.7а, б приведены схема механизма и расчетный пример, поясняющие способ работы с постоянным углом наклона выемочных модулей.
Описываемый подводный добывающий аппарат 1 функционирует совместно с гидроподъемной установкой, содержащей подъемный трубопровод 2, с которым он связан гибким соединительным пульпопроводом 3 (фиг.1а).
В случае, если подъемный трубопровод 2 сам является гибким пульпопроводом, то добывающий аппарат 1 может быть связан с ним непосредственно (фиг.1б).
4 - транспортное плавсредство базирования гидроподъемной установки и добывающего аппарата 1, например полупогружная плавучая платформа с размещенными на ней энергетическим оборудованием и центром управления, с которыми аппарат 1 связан силовым и управляющим кабелями (показаны общей позицией 5), 6 - поверхность моря.
Добывающий аппарат 1 содержит подводную гидроопору 7 с регулируемой положительной и отрицательной плавучестью, установленный на ней донный добычной агрегат 8 с опорно-посадочным устройством 9 той или иной конструкции, с помощью которого он может садиться на поверхность дна 10 и фиксироваться на ней во время работы.
Подводная гидроопора 7 выполнена в виде глубоководного подводного плавсредства с регулируемой положительной и отрицательной плавучестью в целом известной конструкции. Например, имеет заключенную в защитный корпус (кожух)-обтекатель 11 прочную трубчатую или ферменную конструкцию с закрепленными на ней глубоководными средствами плавучести (блоками поплавков, баллонов (условно 12), балластными цистернами с насосами и другим известным в подводной технике оборудованием (на чертежах не показаны).
Подводная гидроопора (плавсредство) 7 оснащена вертикальными 13 и горизонтальными 14 движителями, а также приборами (телекамерами, эхолотами, сканерами), (показаны общей позицией 15), а также органами автоматического управления их работой из центра управления на плавсредстве базирования 4.
С помощью балластных цистерн и движителей производится погружение и точечная посадка аппарата 1 на место добычи, управляемое пространственное перемещение и маневрирование над поверхностью дна, оплыв препятствий, регулируемое всплытие и подводный прием на транспортное плавсредство базирования 4.
Донный добычной агрегат 8 описываемого аппарата 1 содержит прочную вертикальную всасывающую трубу 16, с помощью которой он закреплен на гидроопоре 7 (фиг.2).
Выемочные модули 18 с рабочими органами установлены на нижних оконечностях силовых ферм 17, установленных подвижно вокруг и вдоль вертикальной всасывающей трубы 16.
Вертикальная всасывающая труба 16 оборудована землесосом 19 и связана с пульпопроводом 3 (фиг.1а) или непосредственно с гибким подъемным трубопроводом 2 (фиг.1б) через предотвращающее их закручивание, подвижное устройство 20.
В целом конструкция описываемого аппарата 1 представляет собой подводный плавучий буй, в котором поплавком является гидроопора (плавсредство) 7, а тяжелым центральным стержнем служит вертикально скомпонованный добычной агрегат 8. Так что центр тяжести конструкции находится много ниже уровня (центра) плавучести, благодаря чему аппарат 1 имеет значительную (несколько метров) метацентрическую высоту, что обеспечивает высокую остойчивость и динамическую устойчивость.
В частном техническом решении (см. фиг.2) фермы 17 верхними концами с помощью шарниров 21 подвешены по окружности к кольцевому ползуну 22, установленному на продольных направляющих прочного подвижного патрубка 23, свободно надетого на вертикальную всасывающую трубу 16. На нижнем конце подвижной патрубок 23 снабжен прочным фланцем 24, которым опирается на упорные подшипники 25, установленные на опорном фланце 26 вертикальной всасывающей трубы 16.
Каждая из ферм 17 в своей средней части рычагом 27 длиной, равной половине длины фермы, и шарнирами 28 и 29 подвижно присоединена к фланцу 24 подвижного патрубка 23.
Количество ферм 17 и длина каждой из них выбираются (рассчитываются), исходя из проектной производительности добычного агрегата.
Например, как показано на чертежах, по окружности кольцевого ползуна 22 шарнирно подвешены шесть ферм 17 соответственно с шестью установленными на них выемочными модулями 18.
Силовые фермы 17 связаны с приводами с возможностью перемещения и поворота в радиальной плоскости (соответственно раскрытия-складывания) и шагового поворота вокруг вертикальной всасывающей трубы 16.
Выемочные модули 18 связаны с приводами с возможностью управляемого одновременного и взаимосогласованного перемещения вдоль ферм 17 и поворота относительно них.
В одном из вариантов (см. фиг.2) привод перемещения и поворота ферм 17 вместе с выемочными модулями 18 в радиальной плоскости выполнен состоящим из ряда (например, трех) установленных на подводной гидроопоре 7 вокруг и соосно вертикальной всасывающей трубы 16 силовых гидроцилиндров 30, штоки 31 которых установлены подвижно в выполненных в кольцевом ползуне 22 дуговых прорезях 32 (см. сечение по АА на фиг.2) с возможностью его перемещения вверх-вниз по направляющим подвижного патрубка 23.
Однако в данной конструкции привода длина штоков 31 гидроцилиндров 30 должна быть соизмерима с ходом кольцевого ползуна по патрубку 23. Но выполнение гидроцилиндра с ходом ползуна свыше 3 м технологически затруднительно.
Поэтому в другом варианте (см. фиг.3) привод перемещения и поворота силовых ферм 17 и выемочных модулей 18 в радиальной плоскости выполнен состоящим из установленных на кольцевом ползуне 22 вокруг подвижного патрубка 23 агрегатов 33 с двигателями (гидродвигателями или электродвигателями), взаимодействующими через зубчатые механизмы (редукторы) с выполненными зубчатыми продольными направляющими 35 патрубка 23 с возможностью перемещения по ним вверх-вниз.
36 - шестерни зубчатого механизма, установленные в зацеплении с зубчатыми направляющими 35 подвижного патрубка 23.
37 - общий корпус (кожух) приводного агрегата 33.
38 - соединительные гидрошланги (или кабели), связывающие двигатели приводных агрегатов 33 с питающими их насосами (генераторами), размещенными или на подводной гидроопоре 7, или на плавсредстве базирования 4 (на чертеже не показаны).
Привод шагового поворота шагового поворота силовых ферм 17 вокруг вертикальной всасывающей трубы 16 выполнен состоящим из ряда (например, трех) установленных на подводной гидроопоре 7 вокруг подвижного патрубка 23 реверсных шаговых двигателей (поворотных гидродвигателей) 39, на концах валов 40 которых насажены шестерни 41, установленные в зацеплении с зубчатым колесом 42, надетым на верхний конец подвижного патрубка 23 (фиг.3).
При применении в качестве приводов гидроцилиндров 30 для прохода их штоков 31 в зубчатом колесе 42 выполнены сквозные дуговые прорези 43 (см. сечение по ББ на фиг.2).
Таким образом (см. фиг.3), при перемещении вверх-вниз (стрелки 44) кольцевого ползуна 22 по патрубку 23 все установленные по его окружности фермы 17 одновременно перемещаются и поворачиваются (стрелки 45) в радиальных плоскостях, то складываясь, то раскладываясь.
Пунктиром показано сложенное положение ферм 17.
При шаговом повороте (на заданный угол) патрубка 23 все фермы 17 совместно с выемочными модулями 18 одновременно совершают вокруг всасывающей трубы 16 шаговый поворот (стрелки 46).
В своей совокупности патрубок 23 с ползуном 22 и установленная на нем шарнирно ферма 17 с рычагом 27 половинной длины фермы представляют собой известный, так называемый прямолинейно-направляющий механизм, когда при вертикальном движении ползуна 22 по патрубку 23 конец фермы 17 перемешается прямолинейно по находящейся на уровне шарнира 29 горизонтали 47 (горизонталь прямолинейного перемещения).
Для того чтобы выемочный модуль 18, находящийся ниже этой горизонтали прямолинейного перемещения 47, с одной стороны, мог перемещаться по ровной разрабатываемой поверхности 10 тоже прямолинейно (стрелки 48), а с другой, имел возможность копировать неровный ее рельеф, сохраняя при этом расчетный (оптимальный) угол наклона к ней, каждый выемочный модуль 18 связан с приводом управляемого продольного перемещения (стрелки 49) и поворота (стрелки 50) относительно силовых ферм 17.
Приводы продольного перемещения и поворота выемочных модулей 18 относительно ферм 17 выполнены состоящими из двух гидроцилиндров 51 и 52, корпус которых прикреплены к нижним оконечностям ферм 17, а штоки 53 и 54 с помощью шарнирных 55 и шарнирно-ползунных устройств 56 присоединены к тыльным силовом элементам 57 корпусов выемочных модулей 18 (фиг.4).
При этом гидроцилиндры 51 и 52 через питающие их насосы связаны с органом управления с возможностью (для поддержания заданного угла наклона выемочных модулей в зависимости от изменения рельефа разрабатываемой поверхности 10) одновременного и взаимосогласованного перемещения штоков 53, 54 с изменением их длины и за счет этого соответствующего управляемого перемещения (по стрелкам 49) и поворота (по стрелкам 50) выемочных модулей 18 относительно ферм 17.
58 - гидрошланги, соединяющие гидроцилинлры 51, 52 с питающими их насосами (на чертежах не показаны).
В данной конструкции механизм управляемого перемещения и поворота выемочных модулей 18 относительно ферм 17 полностью определяется законами одновременного изменения длины штоков 53 и 54 гидороцилиндров привода.
В частности, при разработке ровной поверхности и при прямолинейном перемещении по ней выемочных модулей с постоянным углом наклона этот закон однозначно выражается конкретной математической зависимостью, определяющей соответствующий режим разработки (способ работы, см. ниже).
Выемочные модули 18 по форме своих корпусов и по профилю их передних сгребающих частей выполнены с возможностью образования в совокупности при складывании ферм 17 вокруг вертикальной всасывающей трубы 16 замкнутой поверхности (на. фиг.3 ее контур показан пунктиром 59). А опорный решетчатый контейнер при этом по форме выполнен сопряженным с этой поверхностью (см. фиг.5).
В частности, корпуса выемочных модулей 18 выполнены в виде дугообразных со скошенными по круговому конусу передними частями коробов, расположенных друг относительно друга по окружности с образованием в совокупности при складывании ферм 17 вокруг вертикальной всасывающей трубы 16 замкнутой круговой конической поверхности. А решетчатый опорный контейнер в этом случае выполнен в виде усеченного прямого 60 (фиг.5а) или обратного (фиг.5г) кругового конуса 61.
В другом варианте выемочные модули, установленные, например, на шести силовых фермах 17, выполнены в виде трапецеидальных коробов, расположенных друг относительно друга с образованием в совокупности вокруг вертикального всасывающего трубопровода замкнутой с общим коническим профилем шестигранной поверхности. А опорный решетчатый контейнер в этом случае выполнен в виде усеченной шестигранной пирамиды 62 (фиг.5б).
Возможен вариант выполнения корпусов выемочных модулей 18 в виде дугообразных коробов с прямыми дуговыми передними частями и цилиндрического решетчатого контейнера 63 (фиг.5в).
Выполнение решетчатого контейнера по форме образованной корпусами коробов выемочных модулей замкнутой поверхности обеспечивает его плотный охват (обжим) передними сгребающими частями коробов.
С целью выдавливания из коробов выемочных модулей 18 твердой массы и дробления твердых частиц ископаемого о ребра решетчатого контейнера путем силового продавливания их через ячейки его решетки в коробах выемочных модулей 18 с помощью шарнирного устройства 64 установлены прочные вертикальные стенки 65, снабженные выступающими наружу рычагами 66, взаимодействующими (при складывании ферм 17) с фланцем 26 всасывающего трубопровода 16, с возможностью поворота (по стрелкам 67) этих стенок и силового обжима решетчатого контейнера (фиг.6).
По форме стенка 65 выполнена сопряженной с поверхностью обжимаемого ей опорного решетчатого контейнера (60, 61, 62, 63).
Рабочие органы выемочных модулей могут быть выполнены в виде гребенчатых передних (сгребающих) частей 68 (см. фиг.3 вид по А-А) днищ коробов выемочных модулей 18, производящих разрыхление поверхности, и самих корпусов коробов, осуществляющих сгребание разрыхленной твердой массы.
С целью повышения эффективности всасывания твердой массы ископаемого из навала за счет пространственного распределения всасывания конец вертикального всасывающего трубопровода 17 оборудован коллектором 69, по периметру которого внутри замкнутого контура 59 (решетчатого контейнера) установлены разнонаправленно расположенные всасывающие патрубки 70 (см. фиг.2).
Для защиты окружающей морской среды от загрязнения фермы 17 по их длине и вокруг по периметру покрыты раскрывающимся вместе с фермами 17 в виде шатра (зонта) защитным экраном (фиг.2, 3).
Для этого фермы 17 вдоль по длине и вокруг по периметру покрыты прикрепленной к ним и по окружности кольцевого ползуна 22 прочной синтетической (например, нейлоновой, полипропиленовой и т.п.) пленкой 71, армированной прочными (синтетическими) нитями и стропами 72.
Пленка-экран 71 может быть выполнена в форме гофрированной юбки и прикреплена к фермам 16 с возможностью (при радиальном перемещении ферм 17 от вертикальной всасывающей трубы 16 к периферии) раскрытия в виде шатра и компактного складывания (в виде сборок) между фермами 17 при их обратном перемещении (фиг.3).
Например, синтетическая пленка-экран 71 может быть прикреплена продольными стропами 72 к фермам 17 и по окружности кольцевого ползуна 22 с помощью подвижных колец 73 (см. фиг.3 вид по стрелке Б).
Способ работы описываемого добывающего аппарата, включающий разработку с разрыхлением и сгребанием твердой массы ископаемого путем перемещения выемочных модулей по разрабатываемой поверхности, состоит в следующем (см. фиг.3).
Разработку осуществляют на защищенной пленкой-экраном 71 круговой площади поверхности морского дна 10. Перемещения выемочных модулей 18 производят в радиальных направлениях: от всасывающей трубы к периферии (пунктирные стрелки 48) - при разрыхлении и в обратном направлении (сплошные стрелки 48) - при сгребании твердой массы ископаемого в решетчатый контейнер с периодическим шаговым поворотом их вокруг всасывающей трубы 16.
Одновременно при сгребании твердой массы в решетчатый контейнер, за счет силового продавливания ее через решетку контейнера, производят дроблением твердых частиц ископаемого о жесткие специально заостренные ребра решетки.
Пооперационно работа добывающего аппарата состоит в следующем (см. фиг.3).
После выбора места добычи и точечной посадки аппарата 1 передвижением приводом кольцевого ползуна 22 вниз по патрубку 23 (пунктирная стрелка 44) фермы 17 раскрываются, а выемочными модули 18, повернутыми гидроцилиндрами 51, 52 гребенками 68 днищ коробов к поверхности морского дна 10, перемещаясь (пунктирная стрелка 48) в направлении от всасывающей трубы 16 к периферии, разрыхляют поверхность этими гребенками.
Затем передвижением кольцевого ползуна 22 вверх по патрубку (сплошная стрелка 44) фермы 17 складываются, а выемочные модули 18, повернутые гидроцилиндрами 51, 52 под расчетным углом к разрыхленной поверхности, перемещаясь (сплошная стрелка 48) к всасывающей трубе 16, сгребают коробами твердую массу к решетчатому контейнеру.
Взаимодействуя с фланцем 26 вертикальной всасывающей трубы 16 (см. фиг.6), рычаги 66 поворачивают стенки 65 (сплошная стрелка 67), в результате чего твердая масса выдавливается из коробов выемочных модулей 18 и продавливается через решетку опорного контейнера. При этом твердые частицы крупнее ячеек решетки дробятся о ее жесткие ребра.
Поскольку ширина захвата короба выемочного модуля ограничена шириной его днища (см. фиг.3), то для разработки всей круговой площади приводом 39 производят шаговые, на заданный угол повороты ферм 17 (по стрелкам 46).
После нескольких таких шаговых поворотов вся круговая площадь оказывается разработанной, и в решетчатом контейнере создается компактный навал измельченной твердой массы ископаемого (ЖМК). После чего с помощью землесоса 19 производят всасывание гидросмеси вертикальной всасывающей трубой 16 и ее гидротранспортирование по пульпопроводу 3 (фиг.1а) или непосредственно (фиг.1б) в подъемный трубопровод 2 гидроподъемной установки.
Весь рабочий процесс осуществляют внутри экрана 71.
С целью повышения качества разработки ровной поверхности за счет поддержания постоянным заданного угла наклона выемочных модулей к разрабатываемой поверхности длину L1 и L2 штоков 53 и 54 и соответственно гидроцилиндров 51 и 52 привода перемещения и поворота выемочных модулей 18 относительно ферм 17 в процессе их радиального перемещения одновременно (в автоматическом режиме с помощью известных исполнительных устройств органа управления) изменяют по законам
L1=(h-s·Sin(α))/Cos(β)+Tg(β);
L2=L1-d·Tg(β-α);
где β - текущий угол наклона фермы к разрабатываемой поверхности;
α - заданный постоянный угол наклона выемочного модуля;
s - длина корпуса выемочного модуля;
d - расстояние между штоками гидроцилиндров приводов перемещения и поворота выемочных модулей.
h - расстояние между горизонталью прямолинейного перемещения конца фермы и уровнем разрабатываемой поверхности.
На фиг.7а, б приведены схема механизма и расчетный пример, поясняющие данный способ работы для постоянного угла наклона выемочных модулей, равного 30 градусам.
При этом длина фермы 17 равнялась 10 м, h=1 м, s=0.5 м.
Выбор места посадки и управление работой аппарата, его добычного агрегата и выемочных модулей осуществляются органом (центром) управления на основе данных сканирования (известными способами с помощью известных технических средств) поверхности морского дна.
Смена места добычи, а также подъем добычного аппарата на транспортное плавсредство базирования производится за счет продувки балластных цистерн его подводной гидроопоры 7 и работы тяговых движителей 13, 14.
Использованные источники информации
1. Патент РФ №2026492, М. кл. Е21С 50/00, 1995 г.
2. Технические средства для освоения минеральных ресурсов океана (иностранное судостроение), «Судостроение», 1972 г.
3. А.с. СССР №1809070, М. кл. Е02В 1.
4. Патент РФ №2014380, №2029015, М. кл. Е02В 3/02.
5. Патент РФ №1739704, М. кл. Е21С 50/00, 1994 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРНО-МОРСКОЙ ПРОИЗВОДСТВЕННЫЙ КОМПЛЕКС И СПОСОБ ПРИВЕДЕНИЯ ЕГО В РАБОЧЕЕ И ТРАНСПОРТИРУЕМОЕ СОСТОЯНИЯ | 2008 |
|
RU2396433C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ АППАРАТ И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ | 2008 |
|
RU2385254C1 |
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ПРИ РАЗРАБОТКЕ МЕСТОРОЖДЕНИЙ НА ДНЕ МОРЯ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2026491C1 |
| УСТРОЙСТВО ДЛЯ ГЛУБОКОВОДНОЙ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 1989 |
|
SU1739704A1 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА | 2009 |
|
RU2418736C2 |
| АТОМНАЯ ПАРОПРОИЗВОДЯЩАЯ УСТАНОВКА | 2009 |
|
RU2410776C1 |
| ШАГАЮЩАЯ МАШИНА И СПОСОБ ЕЕ ШАГАНИЯ | 2009 |
|
RU2403166C1 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ШЕЛЬФОВОЙ ЗОНЫ МИРОВОГО ОКЕАНА | 2006 |
|
RU2301338C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2374119C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
Группа изобретений относится к горно-морской промышленности, в частности к аппаратам и устройствам для разработки на дне моря месторождений полезных ископаемых, и может найти применение в народном хозяйстве при промышленном освоении минерально-сырьевых ресурсов Мирового океана. Технический результат - повышение эффективности, надежности и экологической безопасности проведения добычных работ. Подводный добывающий аппарат включает донный добычной агрегат, содержащий выемочные модули, установленные посредством силовых элементов - ферм на прочной всасывающей трубе, закрепленной на подводной опоре, и донное опорно-посадочное устройство. Выемочные модули установлены на нижних оконечностях силовых ферм, установленных подвижно вокруг и вдоль прочной вертикальной всасывающей трубы, закрепленной на подводной гидроопоре с регулируемой положительной и отрицательной плавучестью. Фермы и выемочные модули связаны с приводами с возможностью перемещения и поворота в вертикальной плоскости и шагового поворота вокруг вертикальной всасывающей трубы, а также регулируемого перемещения и поворота выемочных модулей относительно ферм. Донное опорно-посадочное устройство состоит из вертикальной всасывающей трубы с закрепленным на ее нижнем конце опорным элементом. Способ работы добывающего аппарата заключается в разработке с рыхлением и сгребанием твердой массы ископаемого путем перемещения выемочных модулей по разрабатываемой поверхности с поворотом под углом наклона к ней. Разработку осуществляют на защищенной экраном круговой площади поверхности. Перемещения выемочных модулей производят в радиальных направлениях от всасывающей трубы к периферии - при рыхлении и в обратном направлении - при сгребании в решетчатый контейнер с одновременным дроблением твердых частиц о ребра его решетки и с периодическим шаговым поворотом их вокруг всасывающей трубы. 2 н. и 13 з.п. ф-лы, 7 ил.
1. Подводный добывающий аппарат, включающий донный добычной агрегат, содержащий выемочные модули с рабочими органами, установленные посредством силовых элементов - ферм на прочной вертикальной всасывающей трубе, закрепленной на подводной опоре, и донное опорно-посадочное устройство, отличающийся тем, что, с целью повышения эффективности, надежности и экологической безопасности работы, выемочные модули установлены на нижних оконечностях силовых ферм, установленных подвижно вокруг и вдоль прочной вертикальной всасывающей трубы, закрепленной на подводной гидроопоре с регулируемой положительной и отрицательной плавучестью, при этом фермы и выемочные модули связаны с приводами с возможностью перемещения и поворота в вертикальной плоскости и шагового поворота вокруг вертикальной всасывающей трубы, а также управляемого перемещения и поворота выемочных модулей относительно ферм, а донное опорно-посадочное устройство состоит из вертикальной всасывающей трубы с закрепленным на ее нижнем конце опорным элементом.
2. Подводный аппарат по п.1, отличающийся тем, что силовые фермы верхними концами шарнирно подвешены по окружности к кольцевому ползуну, установленному на продольных направляющих подвижного патрубка с фланцем на нижнем конце, надетого на вертикальную всасывающую трубу с опорой снизу на ее опорный фланец, и в средней части рычагами на половине длины ферм шарнирно присоединены к фланцу подвижного патрубка, при этом фермы через кольцевой ползун связаны с приводом их перемещения и поворота в вертикальной плоскости, а через подвижной патрубок - с приводом их шагового поворота вокруг вертикальной всасывающей трубы, выемочные модули снабжены связанными с органом управления приводами перемещения и поворота относительно ферм, а опорный элемент выполнен в виде закрепленного на опорном фланце вертикальной всасывающей трубы прочного решетчатого контейнера.
3. Подводный аппарат по п.1 или 2, отличающийся тем, что, с целью защиты окружающей морской среды от загрязнения, силовые фермы по длине и вокруг по периметру покрыты прочной синтетической пленкой-экраном с возможностью раскрытия в виде шатра при вертикальном повороте ферм от вертикальной всасывающей трубы к периферии и компактного складывания между фермами при их повороте в обратном направлении.
4. Подводный аппарат по п.1 или 2, отличающийся тем, что выемочные модули по форме корпусов и по профилю их передних частей выполнены и расположены относительно друг друга с возможностью образования в совокупности вокруг вертикальной всасывающей трубы замкнутой поверхности, а опорный решетчатый контейнер по форме и профилю выполнен сопряженным с этой замкнутой поверхностью.
5. Подводный аппарат по п.2, отличающийся тем, что, с целью копирования разрабатываемой поверхности, приводы перемещения и поворота выемочных модулей относительно силовых ферм выполнены состоящими каждый из двух гидроцилиндров, корпуса которых закреплены на нижних оконечностях ферм, а штоки с помощью шарнирно-ползунного механизма присоединены к тыльным силовым элементам корпусов выемочных модулей, причем привод связан с управляющим органом с возможностью взаимосогласованного передвижения штоков гидроцилиндров.
6. Подводный аппарат по п.2, отличающийся тем, что привод перемещения и поворота силовых ферм в вертикальной плоскости выполнен состоящим из установленных на подводной гидроопоре вокруг вертикальной всасывающей трубы соосно с ней силовых гидроцилиндров, штоки которых установлены подвижно в выполненных в кольцевом ползуне дуговых прорезях с возможностью перемещения его вверх-вниз по направляющим подвижного патрубка.
7. Подводный аппарат по п.2, отличающийся тем, что привод перемещения и поворота силовых ферм в вертикальной плоскости выполнен состоящим из установленных на кольцевом ползуне вокруг подвижного патрубка двигателей, взаимодействующих через зубчатые механизмы с его выполненными зубчатыми продольными направляющими, с возможностью перемещения кольцевого ползуна по ним вверх-вниз.
8. Подводный аппарат по п.2, отличающийся тем, что привод шагового поворота силовых ферм вокруг вертикальной всасывающей трубы выполнен состоящим из установленных на подводной гидроопоре вокруг подвижного патрубка реверсных шаговых двигателей с шестернями на валах, установленными в зацеплении с насаженным на верхний конец подвижного патрубка зубчатым колесом с возможностью его шагового поворота вокруг всасывающей трубы.
9. Подводный аппарат по п.3, отличающийся тем, что синтетическая пленка-экран выполнена с продольными гофрами и стропами и прикреплена стропами к фермам и по окружности кольцевого ползуна с помощью подвижных колец.
10. Подводный аппарат по п.4, отличающийся тем, что корпуса выемочных модулей выполнены в виде дугообразных с прямыми или со скошенными передними частями коробов, расположенных относительно друг друга по окружности с образованием в совокупности вокруг вертикальной всасывающей трубы замкнутой, соответственно цилиндрической или конической, поверхности, а опорный, решетчатый контейнер выполнен соответственно в виде цилиндра или усеченного кругового конуса.
11. Подводный аппарат по п.4, отличающийся тем, что выемочные модули установлены на шести фермах и их корпуса выполнены в виде трапецеидальных со скошенными по плоскости передними частями коробов, расположенных относительно друг друга с образованием в совокупности вокруг вертикальной всасывающей трубы замкнутой шестигранной поверхности, а опорный решетчатый контейнер выполнен в виде усеченной шестигранной пирамиды.
12. Подводный аппарат по п.10, отличающийся тем, что, с целью выталкивания из коробов выемочных модулей и дробления твердых частиц сгребаемой ими массы, в коробах установлены шарнирно прочные вертикальные стенки, выполненные по форме поверхности решетчатого контейнера и снабженные выступающими наружу рычагами, взаимодействующими с опорным фланцем вертикальной всасывающей трубы с возможностью поворота и силового обжима стенками решетчатого контейнера, решетка которого образована жесткими заостренными ребрами.
13. Подводный аппарат по п.4, отличающийся тем, что, с целью распределенности всасывания, конец вертикальной всасывающей трубы внутри решетчатого контейнера оборудован коллектором с установленными по периметру разнонаправленными всасывающими патрубками.
14. Способ работы добывающего аппарата, заключающийся в разработке с разрыхлением и сгребанием твердой массы ископаемого путем перемещения выемочных модулей по разрабатываемой поверхности с поворотом под углом наклона к ней, отличающийся тем, что разработку осуществляют на защищенной экраном круговой площади поверхности, перемещения выемочных модулей производят в радиальных направлениях от всасывающей трубы к периферии - при разрыхлении и в обратном направлении - при сгребании в решетчатый контейнер с одновременным дроблением твердых частиц о ребра его решетки, и с периодическим шаговым поворотом их вокруг всасывающей трубы.
15. Способ работы добывающего аппарата по п.14, отличающийся тем, что угол наклона выемочных модулей к ровной разрабатываемой поверхности путем их поворота поддерживают постоянным, для чего длину L1 и L2 выдвижения штоков гидроцилиндров приводов поворота выемочных модулей одновременно изменяют по законам:
L1=(h-s·Sin(α))/Cos(β)+Tg(β)
L2=L1-d·Tg(β-α),
где β - текущий угол наклона фермы к разрабатываемой поверхности;
α - заданный постоянный угол наклона выемочного модуля;
s - длина корпуса выемочного модуля;
d - расстояние между штоками гидроцилиндров приводов перемещения и поворота выемочных модулей;
h - расстояние между горизонталью прямолинейного перемещения конца фермы и уровнем разрабатываемой поверхности.
| УСТРОЙСТВО ДЛЯ ГЛУБОКОВОДНОЙ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 1989 |
|
SU1739704A1 |
| Устройство для подводной разработки полезных ископаемых | 1974 |
|
SU619655A1 |
| Устройство для добычи полезныхиСКОпАЕМыХ | 1976 |
|
SU842197A1 |
| Глубоководный аппарат | 1990 |
|
SU1809070A1 |
| ГИДРОПОДЪЕМНАЯ УСТАНОВКА | 1981 |
|
SU1816012A1 |
| УСТАНОВКА ДЛЯ ПОДЪЕМА ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА МОРЯ | 1989 |
|
RU2026492C1 |
| ШАГАЮЩАЯ УСТАНОВКА ДЛЯ ВЗЯТИЯ ПРОБ СО ДНА МОРЕЙ И ОКЕАНОВ | 1994 |
|
RU2087718C1 |
| ЗЕМСНАРЯД | 2004 |
|
RU2285090C2 |
| DE 19902133 A1, 27.07.2000. | |||

