Настоящее изобретение относится к управляемой ультразвуком инвазивной процедуре и, в частности, к инвазивным процедурам, управляемым трехмерной ультразвуковой визуализацией.
Целый ряд хирургически инвазивных процедур может управляться ультразвуковой визуализацией, которая отображает внутреннюю часть ткани, подлежащей инвазивной процедуре. Среди них преобладают такие процедуры, которые требуют управления и ориентирования иглы, такие как биопсия наблюдаемых масс в молочной железе и применение местной анестезии. В этих процедурах целевая ткань может быть визуализирована с помощью ультразвука, так же как и путь иглы по мере ее прохождения через ткань в направлении целевой ткани. Для выполнения таких процедур был разработан ряд ультразвуковых систем и устройств визуализации. Когда используется двумерная (2D) ультразвуковая визуализация, важно, чтобы игла была совмещена с плоскостью изображения. Это показано на Фиг. 4, которая показывает ультразвуковой зонд 100, который сканирует двумерную плоскость 102 изображения. Зонд расположен так, что целевая ткань 104 видна на изображении. Игла 106 для доступа к целевой ткани 104 должна постоянно перемещаться в плоскости 102 изображения. Если игла выйдет из плоскости изображения, теряется возможность ее визуализации и наблюдения, как она приближается к целевой ткани. Для многих ультразвуковых зондов коммерчески доступными являются направляющие для биопсийной иглы, которые позволяют игле быть введенной в тело только в плоскости ультразвукового изображения. Другой способ выполнения этого требования описан в патенте США 5158088 (Nelson и соавт.). В системе авторов Nelson и соавт. на кончике вводимого стилета находится передатчик, который передает сигнал, принимаемый зондом ультразвуковой визуализации. Этот сигнал принимается зондом и используется для формирования звукового сигнала по мере того, как кончик стилета приближается к плоскости изображения и затем пересекает ее. Сигналы, принимаемые передатчиком стилета, могут быть использованы для идентификации кончика стилета на двумерном ультразвуковом изображении. Другой двумерный способ визуализации описан в патенте США 5095910 (Powers). Система автора Powers сообщает стилету вибрацию, и это вибрационное движение обнаруживается ультразвуковым методом Допплера. Цветной допплеровский сигнал на ультразвуковом изображении указывает расположение кончика стилета. Но опять же, стилет должен находиться в плоскости изображения для того, чтобы могло произойти допплеровское обнаружение и визуализация.
Трехмерная (3D) ультразвуковая визуализация показала свою перспективность в преодолении проблемы совмещения с двумерной плоскостью изображения. Поскольку трехмерная визуализация изображает объем ткани, а не только одну плоскость, ограничения совмещения с двумерной плоскостью изображения удается избежать. Однако многие врачи не знакомы с трехмерной ультразвуковой визуализацией или с отображением анатомии на трехмерных ультразвуковых изображениях. В дополнение к этому, окружающая ткань может загораживать целевую ткань, иглу в отображаемом объеме, или и то, и другое. Патент США 7529393 (Peszynski и соавт.) показывает несколько подходов к решению этих проблем, включая отображение кончика иглы с большей плотностью линий на дисплее, отображение кончика иглы в меньшем субобъеме и объединение двумерного и трехмерного изображений на одном дисплее. Другим способом использовать трехмерную визуализацию является отображение трех взаимно ортогональных плоскостей изображения, которые сходятся на кончике хирургического инструмента, как описано в патенте США 6572547 (Miller и соавт.) и в заявке на патент США US2010/0121190. Третий способ описан для компьютерной томографии и КТ-рентгеноскопии в заявке на патент США US2007/0100234 (Arenson и соавт.). В системе авторов Arenson и соавт. веерный пучок рентгеновских лучей проецируется в направлении нескольких рядов детекторных элементов. Каждый ряд детекторов используется для восстановления изображения, и все ряды используются для многослойной КТ-рентгеноскопической визуализации. Когда игла проходит через ткань, визуализируемую несколькими слоями, игла обнаруживается в каждом изображении, и несколько изображений объединяются, чтобы образовать составное изображение толстого слоя, показывающее все сегменты иглы во всех объединенных изображениях слоев. Однако стол с пациентом или гентри должны постоянно подстраиваться для того, чтобы удержать целевую ткань на линии между источником рентгеновского излучения и детекторами. В дополнение к этому, рентгеноскопия подвергает пациента и оператора воздействию ионизирующего излучения. В соответствии с этим желательно обеспечить ультразвуковой способ для управления хирургическим инструментом таким образом, чтобы избежать воздействия ионизирующего излучения. Кроме того, для ультразвукового способа желательно избежать проблемы совмещения иглы с плоскостью изображения, с которой сталкиваются способы предшествующего уровня техники, и предложить систему, которая проста в использовании и легко осваивается теми, кто не очень хорошо знаком с трехмерной ультразвуковой визуализацией.
В соответствии с принципами настоящего изобретения описаны ультразвуковая система визуализации и способ для управления инвазивным инструментом, таким как хирургическая игла, для наведения на целевую ткань в организме. Система использует зонд с двумерным массивом передающих элементов, которые электронным путем управляют пучками в трех измерениях таким образом, чтобы сканировать объемную область тела в реальном времени. Зондом с двумерным массивом можно легко манипулировать, чтобы получить изображения целевой ткани и пути, пройденного инвазивным устройством, чтобы достичь целевой ткани, а также оптимизировать угол падения между ультразвуковыми пучками и инструментом. Эхо-сигналы, полученные из трех измерений ткани, обрабатываются многоплоскостным переформатировщиком с получением множества пространственно смежных двумерных плоскостей изображения. Изображения пространственно смежных плоскостей одновременно отображаются в последовательности их пространственного порядка в ткани и постоянно обновляются в реальном времени. По мере того, как инвазивное устройство приближается к целевой ткани, его прохождение может быть отслежено из одной плоскости изображения в следующую, и пространственный порядок изображений дает врачу интуитивное ощущение прогресса в продвижении инструмента. Смежные изображения могут перекрывать друг друга в измерении толщины так, чтобы иглу можно было бы увидеть в смежных изображениях одновременно и с большей легкостью отслеживать прогресс ее продвижения.
НА ЧЕРТЕЖАХ:
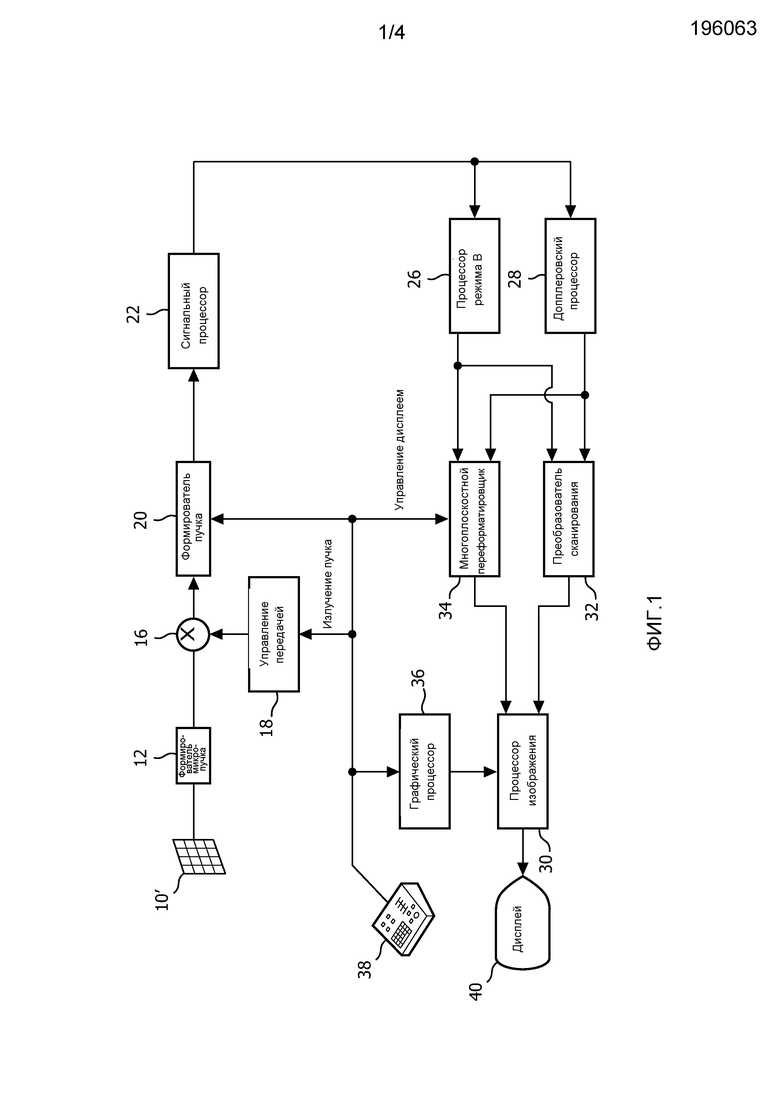
Фиг. 1 иллюстрирует в виде блок-схемы ультразвуковую диагностическую систему визуализации, выполненную в соответствии с принципами настоящего изобретения.
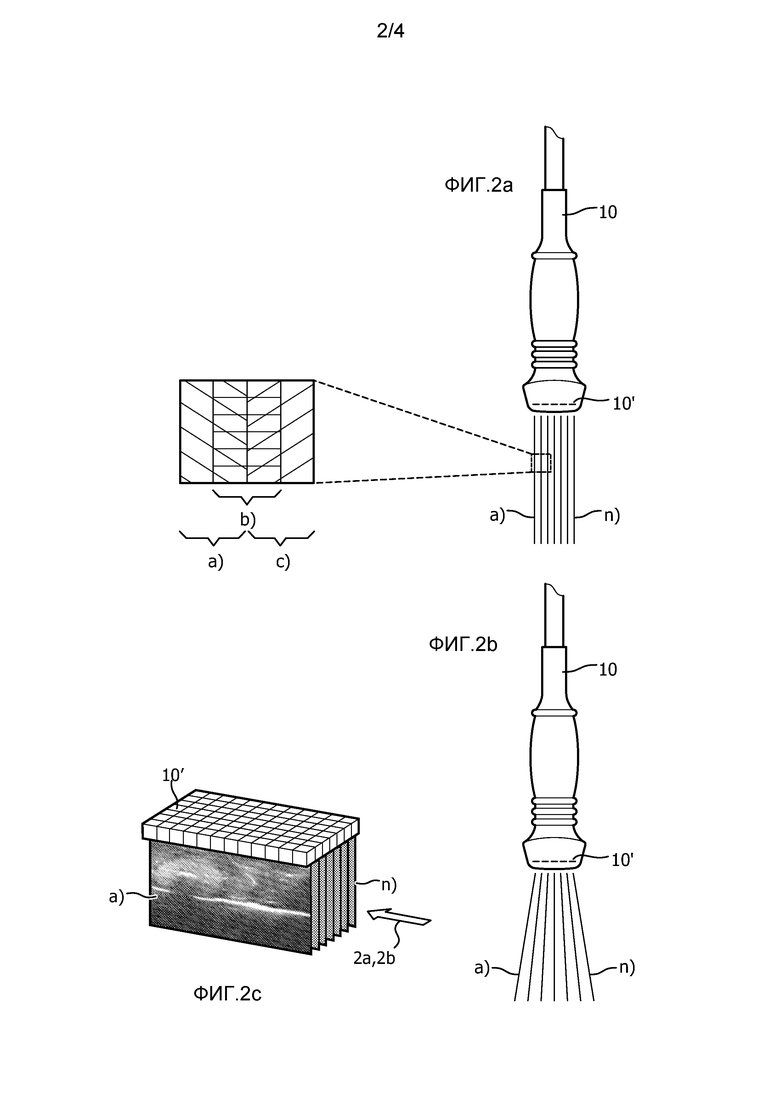
Фиг. 2a и Фиг. 2b иллюстрируют различные совмещения плоскостей, которые могут быть получены с помощью ультразвукового зонда согласно настоящему изобретению, и перекрывающиеся плоскости изображения толстого слоя.
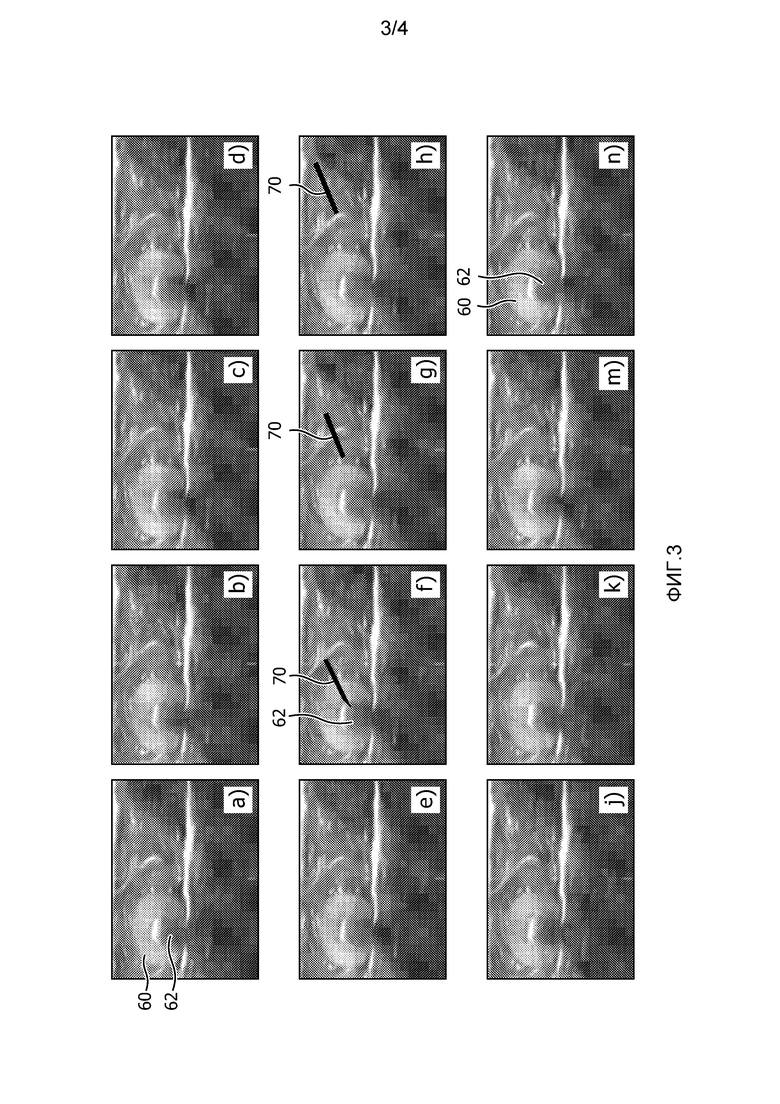
Фиг. 3 иллюстрирует последовательное отображение пространственно смежных плоскостей изображения иглы в ткани в соответствии с принципами настоящего изобретения.
Фиг. 4 иллюстрирует введение иглы в двумерную плоскость изображения ультразвукового зонда.
Обращаясь сначала к Фиг. 1, ультразвуковая диагностическая система визуализации, построенная в соответствии с принципами настоящего изобретения, показана в виде блок-схемы. На Фиг. 1 в ультразвуковом зонде 10 предусмотрен массив 10' передатчиков для передачи ультразвуковых волн и приема эхо-информации. Массив 10' передатчиков является двумерным массивом передающих элементов, способным сканировать в трех измерениях для трехмерной визуализации. Массив передатчиков соединен с формирователем 12 микропучка в зонде, который управляет передачей и приемом сигналов элементами массива. Формирователи микропучка способны по меньшей мере частично формировать пучки для сигналов, принимаемых группами или «участками» передающих элементов, как описано в патентах США 5997479 (Savord и соавт.), 6013032 (Savord) и 6623432 (Powers и соавт.). Формирователь микропучка связан кабелем зонда с переключателем 16 передачи/приема (T/R), который переключается между передачей и приемом и защищает главный формирователь 20 пучка от высокой энергии передаваемых сигналов. Излучение ультразвуковых пучков из массива 10 передатчиков под управлением формирователя 12 микропучка направляется контроллером 18 передачи, соединенным с переключателем передачи/приема и формирователем 20 пучка, которые получают входные данные от действия пользователя в пользовательском интерфейсе или на панели 38 управления. Одной из функций, управляемых контроллером передачи, является направление, в которое направляют пучки. Пучки могут направлять прямо вперед из массива передатчиков (ортогонально к плоскости массива), или под разными углами для более широкого поля обзора, как описано ниже.
Сигналы, для которых частично сформированы пучки, сформированные формирователем 12 микропучка, подаются на главный формирователь 20 пучка, где сигналы, для которых частично сформированы пучки, от отдельных участков элементов объединяются в сигнал, для которого пучки сформированы полностью. Например, главный формирователь 20 пучка может иметь 128 каналов, каждый из которых получает сигнал, для которого пучки сформированы частично, от участка из 12 передающих элементов. Таким образом, сигналы, принимаемые более чем 1500 передающими элементами двумерного массива, могут эффективно способствовать формированию пучков для отдельного сигнала.
Сигналы, для которых сформированы пучки, подаются на сигнальный процессор 22. Сигнальный процессор 22 может обрабатывать принятые эхо-сигналы различными способами, такими как полосовая фильтрация, прореживание, разделение I и Q компонентов и гармоническое разделение сигнала, которые разделяют линейные и нелинейные сигналы таким образом, чтобы позволить идентифицировать нелинейные эхо-сигналы, возвращаемые из ткани и микропузырьков. Сигнальный процессор может также выполнять дополнительное улучшение сигнала, такое как удаление пятнышек, смешивание сигнала и устранение шумов.
Обработанные сигналы подаются на процессор 26 режима B и допплеровский процессор 28. Процессор 26 режима B использует амплитудное детектирование для изображения структур в организме, таких как нормальная ткань, кисты, нервные волокна и клетки крови. Изображения структуры тела в режиме В могут быть сформированы либо в гармоническом режиме, либо в основном режиме, либо в их комбинации, как описано в патенте США 6283919 (Roundhill и соавт.) и в патенте США 6458083 (Jago и соавт.). Допплеровский процессор обрабатывает различающиеся по времени сигналы от ткани и потока крови для обнаружения движения веществ, такого как поток клеток крови в поле изображения. Структурные сигналы и сигналы движения, создаваемые этими процессорами, подаются на преобразователь 32 сканирования и многоплоскостной переформатировщик 34, который формирует данные изображения структуры ткани, потока, или комбинированное изображение обеих характеристик. Преобразователь сканирования преобразует эхо-сигналы в полярных координатах в сигналы изображения желаемого формата, такого как изображение сектора в декартовой системе координат. Многоплоскостной переформатировщик преобразует эхо-сигналы, которые получены из точек на общей плоскости в объемной области тела, в ультразвуковое изображение этой плоскости, как описано в патенте США 6443896 (Detmer). Устройство объемной визуализации (не показано) также может быть использовано для преобразования эхо-сигналов трехмерного набора данных в проецируемое трехмерное изображение, если смотреть от заданной точки, как описано в патенте США 6530885 (Entrekin и соавт.). Двумерные или трехмерные изображения подаются из преобразователя сканирования, многоплоскостного переформатировщика и устройства объемной визуализации (если оно используется) на процессор 30 обработки изображения для дальнейшего улучшения, буферизации и временного хранения для отображения на дисплее 40 изображения.
Графический процессор 36 также соединен с процессором 30 обработки изображения, который генерирует графические наложения для отображения вместе с ультразвуковыми изображениями. Эти графические наложения могут содержать стандартную идентифицирующую информацию, такую как имя пациента, дата и время изображения, параметры визуализации и тому подобное. Для этих целей графический процессор получает от пользовательского интерфейса 38 входные данные, такие как напечатанное имя пациента. Пользовательский интерфейс также соединен с контроллером 18 передачи для управления генерацией ультразвуковых сигналов из массива передатчиков 10' и, следовательно, изображением, формируемым массивом передатчиков и ультразвуковой системой. Пользовательский интерфейс также соединен с многоплоскостным переформатировщиком 34 для отбора и управления отображением нескольких многоплоскостных переформатированных (MPR) изображений в соответствии с настоящим изобретением, как описано ниже.
В соответствии с принципами настоящего изобретения зонд 10 сканирует объемную область, находящуюся перед двумерным массивом передатчиков, и эхо-сигналы, полученные от сканирования этого трехмерного объема, преобразуются в изображения пространственно совмещенных двумерных плоскостей изображения, как показано на Фиг. 2a-2с. Такое пространственное совмещение по отношению к двумерному массиву передатчиков 10' показано на Фиг. 2c. На этом чертеже видно, что объем, находящийся перед (на данном чертеже ниже) двумерным массивом передатчиков 10', сканируется ультразвуковыми пучками, и эхо-сигналы, полученные в ответ на передачу пучков, преобразуются для формирования двумерных изображений последовательности смежных плоскостей изображения, показанных на чертежах ссылками от а) до n). В этом примере многоплоскостной переформатировщик 34 отформатировал пространственную последовательность параллельных не пересекающихся плоскостей. Эти плоскости изображения, обозначенные как а)-n), показаны "ребром" (ортогонально к плоскости чертежа) на Фиг. 2a, с точки зрения стрелки 2а, 2b, показанной на Фиг. 2c. Количество плоскостей изображения и интервал между ними определяются пользователем и типом массива передатчиков, используемого в зонде 10. Количество плоскостей изображения может составлять, например, несколько десятков или множество. Если пучки расположены близко друг к другу в вертикальном измерении, могут быть сформированы расположенные близко друг к другу плоскости изображения и количество плоскостей на заданный объем может быть большим. Более широко расположенные пучки дадут расположенные дальше друг от друга плоскости изображения в том же самом измерении. Толщина плоскости изображения в вертикальном измерении может быть малой с тесно сфокусированными пучками, и плоскости изображения могут быть слегка разнесены друг от друга или следовать друг за другом непрерывно. Плоскости изображения также могут быть перекрывающимися в измерении толщины, как показано на увеличенном виде слева от Фиг. 2a. В этом примере каждая плоскость изображения перекрывает половину смежных плоскостей изображения с каждой стороны, как показано скобками, указывающими толщину плоскости изображения а), b) и c). Плоскости изображения, которые перекрываются по толщине, могут быть сформированы путем перекрытия изображений "толстого слоя", которые описаны в патентной заявке США US2010/0168580 (Thiele).
Фиг. 2b иллюстрирует другую последовательность плоскостей изображения a)-n), которые сканируются зондом 10. В этом примере не пересекающиеся плоскости не строго параллельны, но слегка наклонены так, чтобы слегка отклоняться друг от друга с увеличением глубины. Такое сканирование может быть выполнено посредством управления излучаемыми пучками на малые угловые смещения от ортогонального (нормального) направления, как это иллюстрирует вид плоскостей изображения "ребром". Эти плоскости изображения будут охватывать более широкое поле обзора с увеличенными глубинами по сравнению с параллельными плоскостями, изображенными на Фиг. 2a, но с увеличенным расстоянием между центрами плоскостей с увеличением глубины. Когда изображения толстого слоя используются в этом способе, плоскости могут быть сформированы так, чтобы в значительной мере взаимно перекрываться в ближнем поле, но с уменьшением перекрытия в вертикальном направлении с увеличением глубины.
Последовательность смежных изображений, либо в параллельных плоскостях, либо в расходящихся плоскостях изображения, могут быть сформированы любым из двух способов в варианте осуществления настоящего изобретения. Один из способов заключается в том, чтобы направить сканирующие пучки в желаемых плоскостях изображения, а затем сформировать каждое изображение из эхо-сигналов, полученных от пучков, которые сканируют данную плоскость. Другой способ заключается в том, чтобы получить трехмерный набор данных эхо-сигналов от точек в отсканированном объеме, а затем использовать многоплоскостной переформатировщик 34 для адресации и формирования изображения из эхо-данных, которые находятся в каждой желаемой плоскости. Этот способ адресации может формировать изображение плоскости любой ориентации в трехмерном наборе данных посредством адресации и использования только тех точек данных, которые расположены в желаемой плоскости.
В соответствии с принципами настоящего изобретения смежные плоскости изображения объемной области, сформированные многоплоскостным переформатировщиком 34, отображаются в порядке их пространственной последовательности, как показано ультразвуковым отображением на Фиг. 3. Как показывает этот пример, смежные плоскости изображения отображаются одновременно. Каждая плоскость изображения повторно сканируется в быстрой последовательности, так что каждое изображение на дисплее является живым изображением в реальном времени соответствующей плоскости изображения. Когда зонд 10 удерживается на теле так, что цель инвазивной процедуры находится в поле обзора зонда, можно наблюдать последовательность изображений в реальном времени для наведения иглы по мере ее приближения и достижения целевого участка, и нет необходимости поддерживать совмещение иглы с единственной плоскостью изображения. Ход введения иглы можно проследить по мере того, как она последовательно пересекает плоскости изображения на дисплее. В примере, изображенном на Фиг. 3, двенадцать изображений смежных плоскостей изображения от а) до n) показывают ультразвуковые изображения позвоночника. Целью процедуры является введение анестетика через иглу 70 в нервный пучок 62, и чтобы сделать это, необходимо управлять введением иглы через ткани тела и хрящ 60, чтобы достичь нервного пучка 62. Последовательность подобных изображений можно наблюдать в случае процедуры биопсии молочной железы, в которой заполненная жидкостью киста 60, окруженная тканями молочной железы, содержит в центре твердую массу 62, биопсию которой желательно произвести. Путь, проходимый иглой по мере того, как она приближается к нервному пучку 62, не совмещен с единственной плоскостью изображения в последовательности. Вместо этого игла 70 сначала проходит через плоскость h) изображения, когда она входит в тело, затем угол пути ее ввода проходит через плоскость g) изображения, и, наконец, игла достигает целевого нервного пучка 62 в плоскости f) изображения. В этом примере игла будет видна появляющейся на изображении h), затем на изображении g), а затем на изображении f) в таком порядке. Когда используются перекрывающиеся плоскости изображения, как показано на Фиг. 2a, смежные изображения будут содержать некоторую общую информацию. Таким образом, одна и та же часть иглы может появиться на смежных изображениях. Это проиллюстрировано на Фиг. 3, где некоторая часть 70 иглы из изображения g) также видна на смежном изображении f), а некоторая часть иглы из изображения g) также видна на смежном изображении h). Такое представление общей информации изображений будет приводить к увеличению продолжительности того времени, когда части иглы видны на изображении, что обеспечивает улучшение визуализации иглы. Появление иглы 70 последовательно в этих смежных плоскостях изображения дает врачу интуитивное ощущение того, как ориентирован путь иглы по отношению к зонду и, следовательно, где именно она находится в теле, и как ее следует направить, чтобы достичь намеченного места процедуры.
В типичной процедуре врач будет манипулировать зондом 10 до тех пор, пока место операции внутри тела не появится в поле обзора, предпочтительно в центре последовательности плоскостей изображения, что могло бы быть изображениями f) и g) в примере, изображенном на Фиг. 3. Альтернативно зонд 10 может сканировать только центральную плоскость изображения во время этого первоначального осмотра места операции, а затем переключиться на множественные MPR-представления, когда процедура началась. Врач, как правило, будет маневрировать зондом в различных ориентациях, пока не найдет то, что покажется ему хорошим путем для введения иглы, в одном из изображений. Обычно это будет намеченный путь введения иглы, который совмещен с одним из центральных изображений последовательности. Врач, как правило, предпочитает отслеживать введение иглы в одном изображении, однако анатомия тела не всегда может этому способствовать. Врач будет наблюдать за положением корпуса зонда или маркера на корпусе, который указывает на ориентацию плоскости изображения по отношению к положению зонда, и, с помощью или без помощи направляющей для иглы, начнет введение иглы вдоль желаемого пути. Игла может столкнуться с более твердыми и более мягкими областями ткани по мере введения, в результате чего игла будет отклоняться от намеченного пути, даже если врач точно направляет иглу. Это изменение направления движения может привести иглу к выходу за пределы ее единственной плоскости изображения в вертикальном направлении в смежную плоскость. Для стандартного зонда двумерной визуализации в этом случае необходимо отрегулировать положение зонда так, чтобы вся игла, и особенно ее кончик, снова находилась в плоскости изображения. Возможно также перемещать зонд 10 с двумерным массивом по настоящему примеру так, чтобы заново совместить иглу и ее наконечник с единственной плоскостью изображения. Однако настоящее изобретение устраняет эту необходимость изменять положение зонда. Как только найдено оптимальное акустическое окно на коже тела, зонд может удерживаться в этой позиции. Необязательно перемещать зонд из этого акустического окна при изменении пути иглы, потому что кончик иглы появится в изображении смежной плоскости изображения, как показано на Фиг. 3. Таким образом, врач может поддерживать стационарное положение зонда по отношению к телу, или даже позволить помощнику держать зонд в заданном положении, в то время как врач концентрирует свое внимание на последовательном отображении изображений (Фиг. 3) и направлении иглы. Больше не нужно постоянно пытаться маневрировать введением иглы или зондом, чтобы удерживать иглу в единственной плоскости изображения.
Возможность маневрировать зондом 10 одной рукой, вводя иглу другой рукой, позволяет врачу оптимизировать визуализацию иглы на изображениях. Визуализация иглы в ультразвуковых изображениях может быть плохой, если угол между ультразвуковыми пучками и иглой не является оптимальным. Если игла вводится под небольшим углом, так что она практически параллельна поверхности кожи и плоскости передатчика, игла будет практически зеркальным отражателем, возвращая сильное эхо от почти ортогонально излучаемых пучков. Однако когда игла вставлена под большим углом, энергия пучков по существу будет скользить вдоль иглы и отражаться в направлении от зонда; очень малое количество энергии в этом случае отражается обратно в массив передатчиков. Вследствие этого может быть трудно четко визуализировать иглу на изображениях. Однако в отсутствие необходимости поддерживать совмещение пути ввода иглы с единственной плоскостью изображения зонд может быть переориентирован или могут быть использованы расходящиеся пучки, как показано на Фиг. 2b, для лучшей оптимизации угла между пучками и путем ввода иглы, чтобы от иглы отражались более сильные эхо-сигналы в массив передатчиков для формирования более резкого изображения иглы.
Когда зонд и система образуют большое количество смежных MPR-изображений, может оказаться невозможным просмотреть все изображения на дисплее одновременно. Врач может пожелать просматривать изображения в большем размере, например, как с двенадцатью изображениями на Фиг. 3, чтобы иметь возможность лучше наблюдать за изображениями. Таким образом, изображения a)-n) на Фиг. 3 могут быть только изображениями двенадцати центральных плоскостей изображения, производимых зондом. Могут существовать дополнительные смежные изображения до изображения a) и после изображения n) в полной последовательности смежных изображений. В этом случае врач будет манипулировать управлением дисплеем в пользовательском интерфейсе 38, чтобы выбрать группу смежных изображений для отображения на дисплее. Как правило, врач будет прокручивать последовательность вверх или вниз по мере введения иглы, сохраняя изображение текущего положения кончика иглы (изображение f) в примере, изображенном на Фиг. 3) в центре отображаемой в данный момент группы изображений. Поступая таким образом, врач будет уверен, что следующая смежная плоскость изображения, в которую перейдет кончик иглы при продвижении, всегда будет отображаться либо в центральном ряду, либо на строку выше или ниже в последовательности.
Другой формат отображения, который может быть использован, заключается в использовании одной строки или одного столбца соседних изображений вместо нескольких рядов изображений, как показано на Фиг. 3. Строка изображений будет являться частью полной последовательности изображений, и врач будет сдвигать строку влево или вправо с помощью элементов управления, чтобы увидеть новые плоскости изображения с одной или другой стороны отображаемой в данный момент на дисплее группы изображений. При таком отображении врач обычно будет сдвигать отображаемые изображения влево или вправо, чтобы изображение кончика иглы оставалось в центральном изображении ряда. Центральное изображение может быть показано в большем размере, чем все остальные в строке, для улучшения визуализации кончика иглы на этом изображении. Использование одной строки обычно требует больше манипуляций пользовательскими элементами управления, чтобы сдвигать изображения влево или вправо, чем использование нескольких строк изображений, как показано на Фиг. 3.
Реализацию настоящего изобретения будут часто предпочитать врачи, которые знакомы с инвазивными процедурами, направляемыми двумерным ультразвуком, и не привыкли к использованию трехмерной объемной визуализации для хирургического дистанционного управления, поскольку процедура может управляться посредством использования последовательности только двумерных изображений, как показано на Фиг. 3. Врач получает преимущество трехмерного контроля, поскольку сканируются множество плоскостей в трехмерной объемной области, но при этом должен наблюдать не трехмерную объемную визуализацию при управлении процедурой, а только знакомые двумерные изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХМЕРНОЕ УЛЬТРАЗВУКОВОЕ НАВЕДЕНИЕ МНОЖЕСТВА ИНВАЗИВНЫХ УСТРОЙСТВ | 2013 |
|
RU2644540C2 |
| УЛЬТРАЗВУКОВОЕ УПРАВЛЕНИЕ ТРАЕКТОРИЕЙ ИГЛЫ ВО ВРЕМЯ БИОПСИИ | 2013 |
|
RU2638621C2 |
| СПОСОБ УПРАВЛЕНИЯ ВВОДОМ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ПОСРЕДСТВОМ ТРЕХМЕРНОЙ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2011 |
|
RU2627596C2 |
| НАПРАВЛЯЕМЫЕ УЛЬТРАЗВУКОМ БИОПСИИ В ТРЕХ ИЗМЕРЕНИЯХ | 2013 |
|
RU2629237C2 |
| АВТОМАТИЗИРОВАННАЯ ИДЕНТИФИКАЦИЯ ПОЛОЖЕНИЯ РЕГУРГИТАЦИОННОГО ОТВЕРСТИЯ МИТРАЛЬНОГО КЛАПАНА НА УЛЬТРАЗВУКОВОМ ИЗОБРАЖЕНИИ | 2011 |
|
RU2589627C2 |
| УЛЬТРАЗВУКОВОЕ ИЗМЕРЕНИЕ ОБЪЕМНОГО ПОТОКА ДЛЯ ПЛАНИРОВАНИЯ АБЛЯЦИИ | 2013 |
|
RU2651875C2 |
| ОДНОВРЕМЕННОЕ УЛЬТРАЗВУКОВОЕ НАБЛЮДЕНИЕ ТРЕХМЕРНОГО ОБЪЕМА С МНОЖЕСТВА НАПРАВЛЕНИЙ | 2013 |
|
RU2634295C2 |
| ВИЗУАЛИЗАЦИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ПОЛЕМ ОБЗОРА С ПОМОЩЬЮ ДВУМЕРНОГО МАТРИЧНОГО ЗОНДА | 2009 |
|
RU2507535C2 |
| БЛОК УПРАВЛЕНИЯ УЛЬТРАЗВУКОВЫМИ ИССЛЕДОВАНИЯМИ | 2019 |
|
RU2800255C2 |
| ПОЛУЧЕНИЕ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ПОЛЕМ ЗРЕНИЯ С ПОМОЩЬЮ НАПРАВЛЯЕМОГО СКАНИРОВАНИЯ С EFOV | 2009 |
|
RU2519811C2 |

Изобретение относится к медицинской технике, а именно к ультразвуковым системам визуализации. Система содержит ультразвуковой зонд с двумерным массивом передатчиков, выполненный с возможностью направления пучков ультразвука в объёмную область места операции, формирователь пучка, выполненный с возможностью приёма эхо-сигнала, многоплоскостной переформатировщик, для формирования в реальном времени изображений последовательности пространственно смежных плоскостей изображения, и дисплей ультразвукового изображения. Пространственно смежные плоскости изображения перекрываются так, что некоторые двумерные изображения в реальном времени включают общую информацию изображения, соответствующего инвазивному устройству. Использование изобретения позволяет облегчить освоение системы лицами, незнакомыми с трёхмерной ультразвуковой визуализацией. 15 з.п. ф-лы, 6 ил.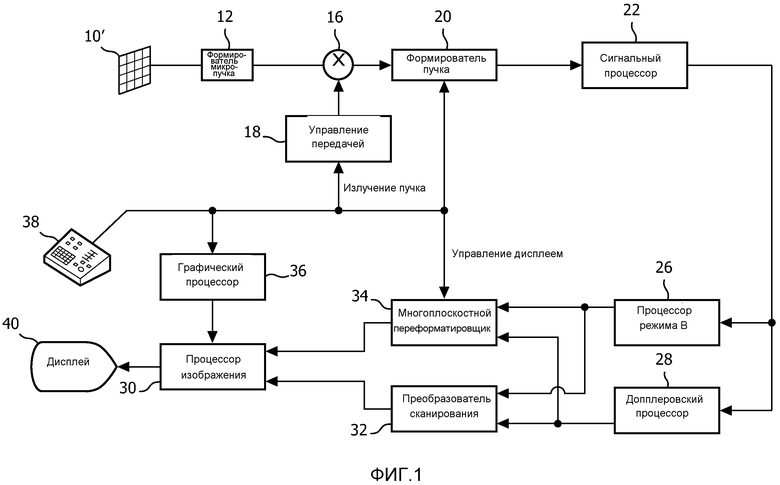
1. Ультразвуковая система визуализации для управления введением в тело инвазивного устройства, включающая в себя:
ультразвуковой зонд с двумерным массивом передатчиков, выполненный с возможностью направления пучков ультразвука в объемную область, содержащую место операции, к которому должно получить доступ инвазивное устройство;
формирователь пучка, выполненный с возможностью приема эхо-сигнала, возвращаемого в ответ на пучки, для формирования эхо-сигналов;
многоплоскостной переформатировщик, реагирующий на эхо-сигналы, принятые из объемной области, для формирования в реальном времени изображений последовательности пространственно смежных плоскостей изображения; и
дисплей ультразвукового изображения, соединенный с многоплоскостным переформатировщиком, управляемый для
одновременного отображения в реальном времени последовательности из трех или более двумерных изображений пространственно смежных, разделенных в вертикальном направлении плоскостей изображения места операции и окружающей анатомии в пространственно смежном порядке,
причем пространственно смежные плоскости изображения перекрываются так, что по меньшей мере некоторые из трех или более двумерных изображений в реальном времени включают общую информацию изображения, соответствующего инвазивному устройству.
2. Ультразвуковая система визуализации по п. 1, в которой плоскости изображения являются пространственно смежными друг другу в вертикальном направлении.
3. Ультразвуковая система визуализации по п. 2, в которой плоскости изображения являются пространственно смежными друг другу в направлении толщины.
4. Ультразвуковая система визуализации по п. 2, в которой плоскости изображения являются пространственно непрерывными друг с другом в вертикальном направлении.
5. Ультразвуковая система визуализации по п. 3, в которой смежные плоскости изображения являются пространственно перекрывающимися в направлении толщины.
6. Ультразвуковая система визуализации по п. 3, в которой изображения являются изображениями толстого слоя.
7. Ультразвуковая система визуализации по п. 1, в которой плоскости пространственно смежных изображений параллельны друг другу в вертикальном направлении.
8. Ультразвуковая система визуализации по п. 1, в которой плоскости пространственно смежных изображений расположены под углом друг к другу в вертикальном направлении.
9. Ультразвуковая система визуализации по п. 1, в которой дисплей изображения отображает несколько рядов изображений пространственно смежных плоскостей изображения, причем плоскость изображения в каждом ряду является пространственно смежной с плоскостью изображения в смежном ряду.
10. Ультразвуковая система визуализации по п. 1, в которой многоплоскостной переформатировщик формирует двумерные изображения заданного числа смежных плоскостей изображения; и
дисплей изображения отображает одну строку или один столбец изображений смежных плоскостей изображения, где количество изображений в одной строке или в одном столбце меньше заданного числа.
11. Ультразвуковая система визуализации по п. 10, дополнительно включающая в себя пользовательский элемент управления;
при этом дисплей изображения реагирует на пользовательский элемент управления, чтобы изменить идентификацию смежных плоскостей изображения, которые отображаются в одной строке или в одном столбце изображений.
12. Ультразвуковая система визуализации по п. 10, в которой строка или столбец отображает изображение пространственно первой плоскости изображения на одном конце и пространственно последней плоскости изображения на другом конце строки или столбца, и
пользовательский элемент управления выполнен с возможностью отображения изображения плоскости изображения, которая предшествует пространственно первой плоскости изображения или следует за пространственно последней плоскостью изображения в строке или столбце.
13. Ультразвуковая система визуализации по п. 1, в которой окружающая анатомия, показываемая на одном или более из отображаемых изображений, включает в себя путь введения инвазивного устройства.
14. Ультразвуковая система визуализации по п. 13, в которой путь введения инвазивного устройства показывается на множестве пространственно смежных изображений.
15. Ультразвуковая система визуализации по п. 13, в которой часть инвазивного устройства показывается в каждом из множества изображений смежных плоскостей изображения.
16. Ультразвуковая система визуализации по п. 15, в которой некоторая часть той части инвазивного устройства, которая показывается на одном изображении, также показывается в той части инвазивного устройства, которая показывается на изображении смежной плоскости изображения.
| US 2010240997 A1, 23.09.2010 | |||
| US 2007100234 A1, 03.05.2007 | |||
| US 2008146942 А1, 19.06.2008 | |||
| US 2010185094 A1, 22.07.2010 | |||
| WO 2009063423 A1, 22.05.2009 | |||
| УСТРОЙСТВО И СПОСОБ ВИЗУАЛИЗАЦИИ ОБЪЕКТОВ В ТРУБЕ, ПРОВОДЯЩЕЙ ТЕКУЧУЮ СРЕДУ | 2004 |
|
RU2352924C2 |

