Настоящее изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к ультразвуковым диагностическим системам визуализации, обеспечивающим возможность визуализации и направления введения иглы для биопсии в режиме реального времени.
Ультразвуковая визуализация уже давно используется для визуализации траектории введения игл для биопсии и других инвазивных устройств, так чтобы врач-клиницист мог визуально наблюдать за введением иглы в направлении и к целевой анатомической структуре, назначенной к биопсии. Обычно это осуществляется с помощью двухмерной (2D) ультразвуковой визуализации и зонда для 2D визуализации, оснащенного направляющей иглы. Одна такая направляющая иглы проиллюстрирована в патенте США № 6203499 (Imling и др.). Целевое назначение направляющей иглы заключается в удержании иглы выровненной с плоскостью 2D изображения ультразвукового зонда, так что введение иглы непрерывно осуществляется в пределах этой плоскости, где это постоянно визуализируется посредством ультразвукового зонда. Направляющая иглы крепится на зонд, так что отверстие или прорезь в направляющей, через которое вводится игла, находится в фиксированном положении, выровненном с плоскостью изображения зонда. Это ограничивает введение иглы до двух положений: с одного конца зонда или с другого. Врач-клиницист осуществляет манипуляции с зондом до тех пор, пока целевая анатомическая структура не окажется в поле зрения в плоскости изображения. Затем врач-клиницист осуществляет введение иглы через направляющую и под наклоном, что будет побуждать кончик иглы к введению в направлении и достижению целевой анатомической структуры. Затем, через просвет иглы может быть извлечен образец целевой анатомической структуры.
Проблема, часто встречающаяся при пункционных биопсиях, заключается в удержании траектории введения иглы постоянно выровненной с плоскостью изображения зонда. Существуют два источника данной проблемы. Один - это то, что с помощью одной руки необходимо удерживать зонд неподвижно с целью удержания плоскости изображения в фиксированном положении, в то время как с помощью другой руки осуществляется манипулирование иглой и ее введение. Другая проблема заключается в том, что игла может искривляться и отклоняться от правильного направления, поскольку она вводится и входит в столкновение с тканями различной плотности и жесткости по мере того, как проникает в ткань тела. Это может приводить к отклонению иглы от одной плоскости по мере введения. Вследствие этого, желательно было бы иметь более широкую зону визуализации целевой анатомической структуры и траектории введения иглы, такую как зона, предоставляемая посредством трехмерной (3D) ультразвуковой визуализации. Дополнительно, было бы желательным обеспечение возможности введения иглы из множества положений, а не только с концов зонда.
Трехмерная ультразвуковая визуализация предоставляет более широкую зону визуализации введения иглы. Однако многим врачам-клиницистам не нравятся помехи и часто неоднозначное восприятие глубины в 3D ультразвуковой визуализации. Они предпочитают отчетливое и легкое для понимания двухмерное изображение. Один способ удовлетворить данное желание заключается в использовании 3D визуализации совместно с многоплоскостной реконструкцией (MPR). При использовании реконструкции MPR 3D зонд будет осуществлять сканирование трехмерного объема области перед зондом, включающего в себя целевую анатомическую структуру, затем в объеме выбирают одну плоскость для конструирования в виде 2D изображения. Это обеспечивает врачу-клиницисту возможность удержания 3D зонда неподвижно и корректировки местоположения плоскости по MPR с целью включения плоскости введения иглы. К сожалению, на практике это представляет собой процедуру, требующую участия трех рук: одна рука - для удержания зонда, одна - для введения иглы, и третья рука - для корректировки местоположения плоскости по MPR. Желательным было бы улучшение данной процедуры, так чтобы игла постоянно визуализировалась в 3D объеме, когда одна рука удерживает зонд, а другая рука осуществляет введение иглы.
В соответствии с принципами настоящего изобретения, диагностическая ультразвуковая система имеет зонд для 3D визуализации с направляющей иглы, которая автоматически выравнивает плоскость отображаемого ультразвукового изображения относительно плоскости введения иглы. Направляющая иглы, присоединенная к зонду для визуализации, формирует сигнал, идентифицирующий местоположение плоскости введения иглы в объемной области, которая может быть сканирована посредством зонда. Ультразвуковая система формирует изображение идентифицированной плоскости, предпочтительно, посредством двухпроекционной визуализации, посредством которой осуществляют сканирование только идентифицированной плоскости или плоскостей. В одном варианте осуществления могут быть идентифицированы плоскости введения множества игл, что облегчает использование ультразвуковой системы по настоящему изобретению для процедур, таких как РЧ абляция, с использованием множества игл. В одном другом варианте осуществления могут быть идентифицированы и визуализированы плоскости введения различно наклоненных игл.
НА ЧЕРТЕЖАХ:
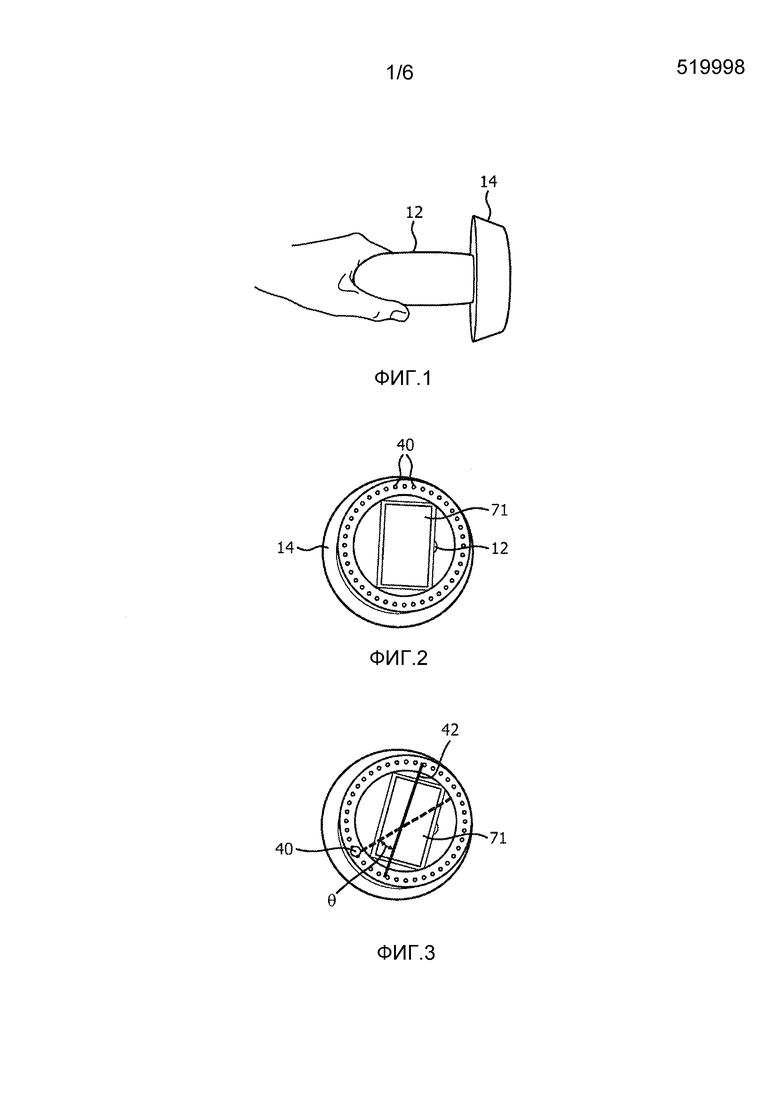
фиг. 1 иллюстрирует 3D ультразвуковой зонд, удерживаемый посредством рукоятки зонда, с направляющей иглы по настоящему изобретению, присоединенной к дистальному концу зонда;
фиг. 2 представляет собой вид лицевой части 3D зонда по фиг. 1 с направляющей иглы, присоединенной к и расположенной вокруг дистального конца зонда;
фиг. 3 иллюстрирует опорное местоположение плоскости и местоположение плоскости введения зонда и направляющей иглы по фиг. 1 и по фиг. 2;
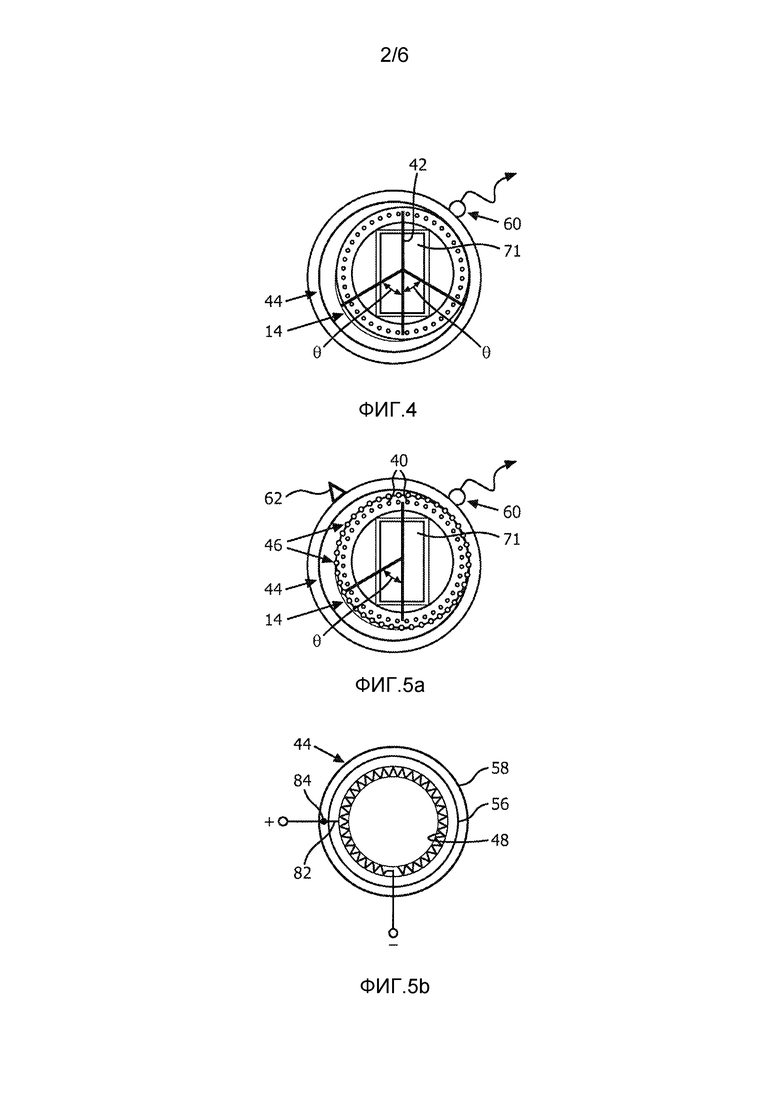
фиг. 4 демонстрирует направляющую иглы, присоединенную к концу зонда, с расположенным вокруг кодовым датчиком положения иглы и беспроводным устройством связи;
фиг. 5a иллюстрирует направляющую иглы по настоящему изобретению, использующую оптический кодовый датчик положения иглы;
фиг. 5b иллюстрирует направляющую иглы по настоящему изобретению, использующую резистивный кодовый датчик положения иглы;
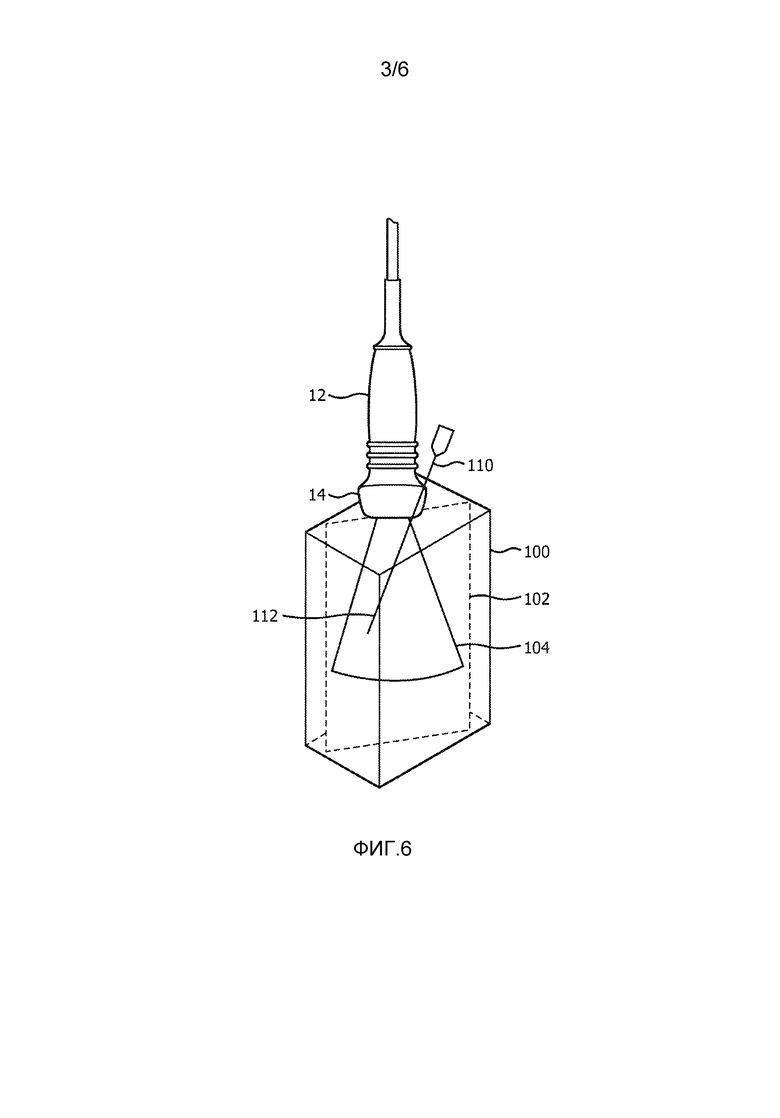
фиг. 6 иллюстрирует отношение между плоскостью введения иглы и местоположением двух проекций, в которых плоскость введения располагается относительно объемной области, которая может быть сканирована посредством зонда для 3D визуализации;
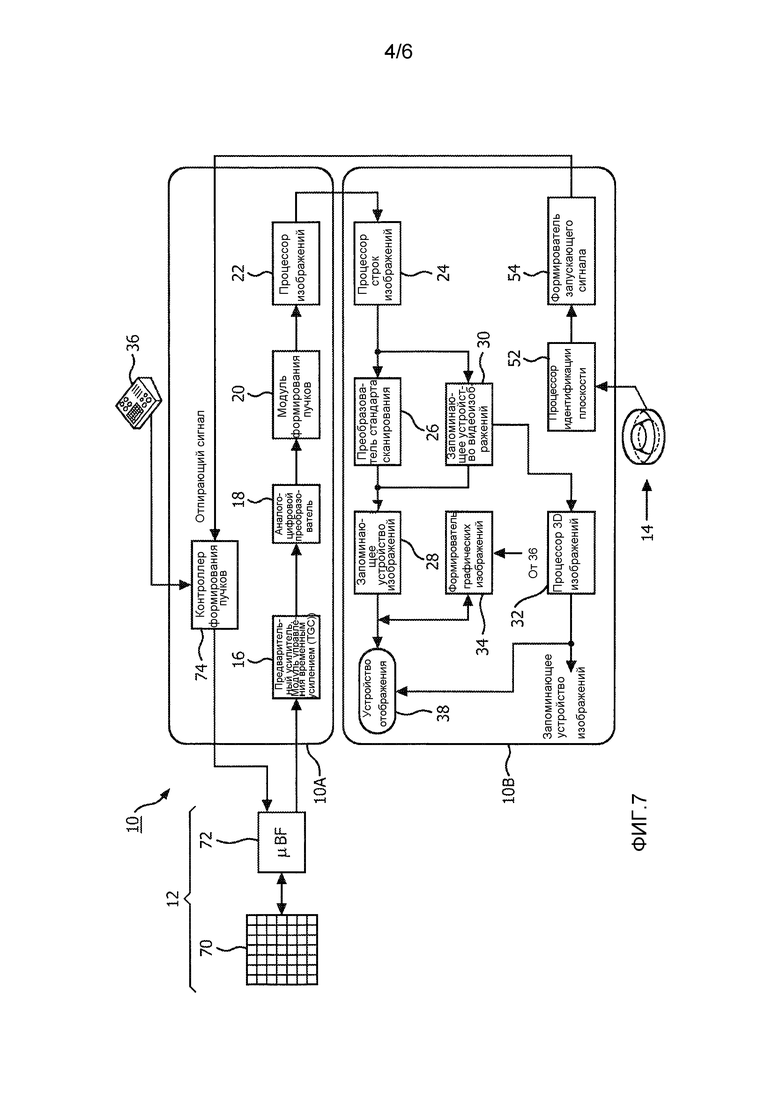
фиг. 7 иллюстрирует, в форме структурной диаграммы, ультразвуковую систему с направляющей иглы, сконструированную в соответствии с принципами настоящего изобретения;
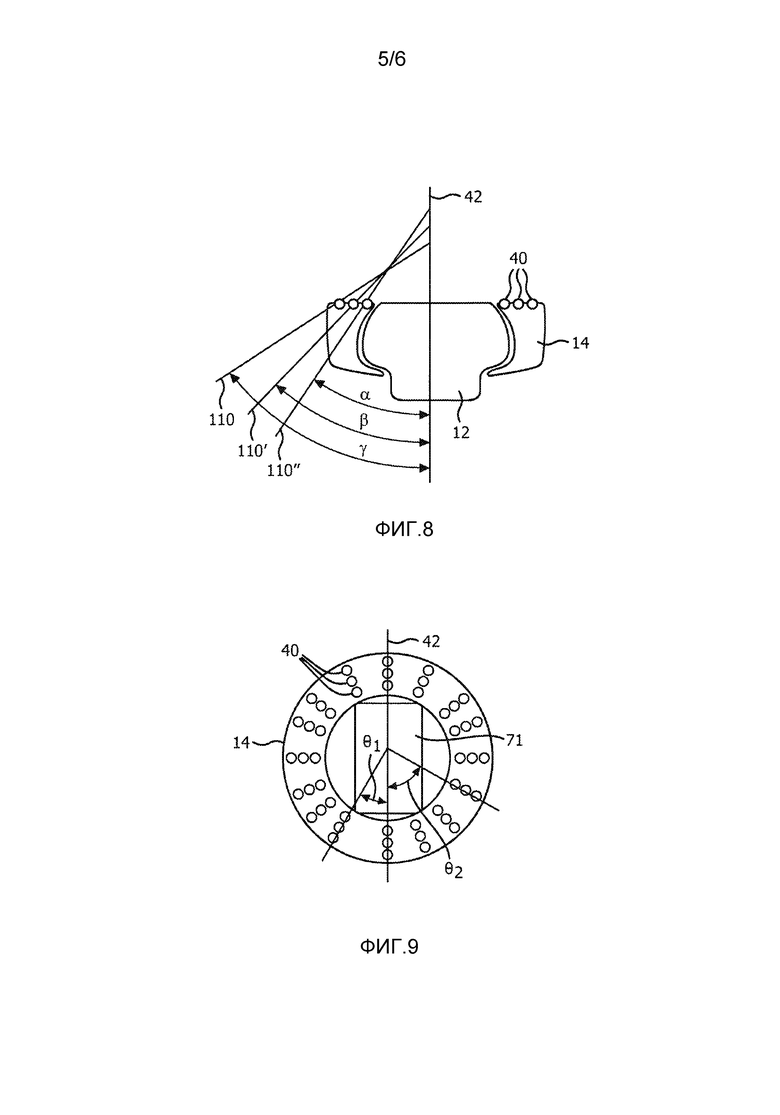
фиг. 8 и фиг. 9 иллюстрируют направляющую иглы по настоящему изобретению с множеством углов наклона для введения иглы;
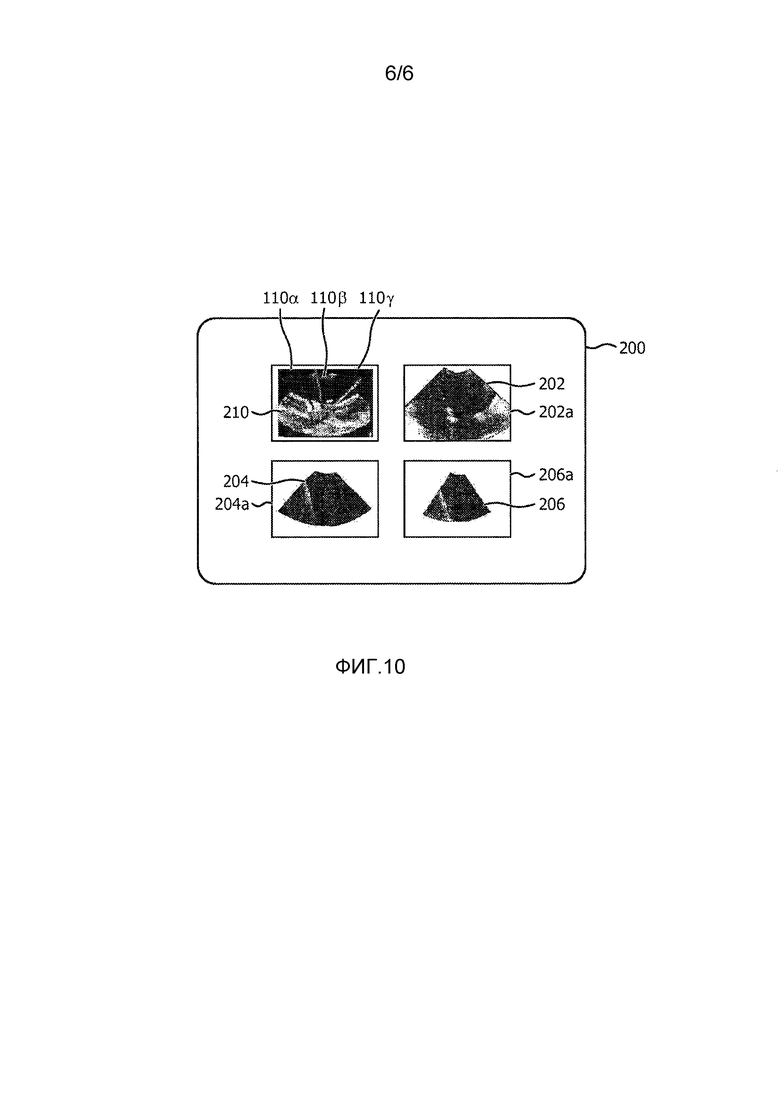
фиг. 10 иллюстрирует ультразвуковое отображение множества игл, используемых для процедуры микроволновой абляции.
Касательно, в первую очередь, фиг. 1, продемонстрирован 3D ультразвуковой зонд 12 для визуализации, удерживаемый со стороны своего проксимального конца (со стороны провода), с направляющей 14 иглы по настоящему изобретению, присоединенной к дистальному (со стороны акустического окна) концу зонда. Направляющая иглы присоединена к зонду в фиксированной ориентации посредством выравнивания относительно отличительного признака зонда, такого как его указатель ориентации зонда. Указатель ориентации зонда представляет собой признак, обычно располагающийся на одной стороне дистального конца зонда, который врач-клиницист использует для соотнесения ориентации зонда на субъекте исследования с ориентацией анатомической структуры в ультразвуковом изображении. Смотрите, например, патент США №5255682 (Pawluskiewicz и др.). В сконструированном варианте осуществления зонд 12 имеет указатель ориентации, сформированный в качестве проекции, которая является выровненной относительно совмещаемого паза во внутренней окружности направляющей иглы, обеспечивая тем самым, чтобы направляющая иглы могла быть присоединена к зонду только в одной известной ориентации. Будучи соответствующим образом присоединенной, лицевая часть направляющей иглы является выровненной с лицевой частью линзы 71 зонда, как продемонстрировано в виде сверху лицевой части обоих компонентов на фиг. 2. Проиллюстрированная направляющая иглы представляет собой кольцеобразную структуру с некоторым количеством выполненных под углом отверстий 40, расположенных вокруг направляющей. Данные отверстия являются немного большими, чем размер иглы, с которой намечено использование направляющую, достаточно малыми для того, чтобы ограничить траекторию введения иглы, тем не менее, достаточно большими для того, чтобы позволить врачу-клиницисту передвигать и осуществлять контроль направления иглы по мере ее введения. В проиллюстрированной направляющей иглы имеется тридцать шесть равномерно распределенных в пространстве отверстий 40, по одному на каждые 10º по окружности кольцеобразной направляющей. Данные отверстия являются выполненными под углом, так что траектория вводимой иглы направлена под линзу 71, и траектория проходит в апертуру зонда. В проиллюстрированном варианте осуществления, отверстия являются выполненными под углом 20º относительно оси под прямым углом к лицевой части линзы зонда. Зонд 12 представляет собой 3D зонд для визуализации, который, в предпочтительном варианте, имеет двухмерный массив преобразовательных элементов, посредством которого пирамидальный или трапецеидальный объем перед линзой может быть сканирован посредством направления электронного пучка. Также могут использоваться механически сканирующие 3D зонды. Поскольку направление иглы в субъект исследования осуществляется посредством направляющей иглы, осуществляется направление ее траектории введения в объемную область, которая может быть визуализирована посредством 3D зонда 12. Фиг. 3 иллюстрирует опорную плоскость 42, проецирующуюся под прямым углом к лицевой части линзы 71 и перпендикулярно концам зонда 2D массива. Эта иллюстрация демонстрирует отверстие 40 (увеличенное в целях иллюстрирования), через которое может вводиться игла с целью продвижения по траектории введения в плоскости визуализации зонда, расположенной под углом θ относительно опорной плоскости 42.
Фиг. 4 иллюстрирует направляющую 14 иглы с поворотным кодовым датчиком 44, который идентифицирует местоположение отверстия вокруг направляющей, через которое осуществляется введение иглы. Когда, на фиг. 4, осуществляется введение иглы через отверстие в положении направляющей 14 «на восемь часов», кодовый датчик идентифицирует плоскость сканирования в положении θ относительно опорной плоскости 42, в котором может визуализироваться траектория введения иглы. Если введение иглы осуществляется через отверстие в положении, например, «на четыре часа», кодовый датчик будет определять плоскость сканирования в положении -θ, в котором может визуализироваться траектория введения. Идентифицированную плоскость сканирования передают на ультразвуковую систему, управляющую работой зонда, либо посредством проводного соединения, либо посредством беспроводного соединения, такого как линия 60 связи Bluetooth. Энергия для кодового датчика может предоставляться либо посредством проводного соединения, либо посредством батареи 62.
Кодовый датчик может быть сконструирован некоторым количеством способов. Один способ заключается в использовании оптического кодирования, как продемонстрировано на фиг.5a. В этом варианте осуществления имеется некоторое количество световых излучателей, таких как светодиоды 46 LED, которые направляют свет через отверстия 40 с целью освещения детекторов на другой стороне отверстий. Когда осуществляется введение иглы через конкретное отверстие, игла будет блокировать свет от детектора для этого отверстия, и сигнал детектора затем идентифицирует данное конкретное отверстие и его соответствующую плоскость сканирования в качестве элемента, через который осуществляется введение иглы. Ультразвуковой зонд и ультразвуковая система затем будут визуализировать идентифицированную плоскость сканирования и введение иглы в этой плоскости. Как проиллюстрировано на фиг. 5a, когда осуществляется введение иглы через отверстие 40 в положении направляющей иглы «на восемь часов», оптический сигнал детектора идентифицирует плоскость сканирования θ в качестве плоскости траектории введения иглы.
Одно другое осуществление кодового датчика, использующее резистивный кодовый датчик, проиллюстрировано на фиг. 5b. В этом осуществлении кодовый датчик 44 имеет внешнее скользящее кольцо с одним или более отверстиями или канавками 84, через которые может осуществляться введение иглы. Данное внешнее скользящее кольцо 58 может вращаться вокруг внутреннего кольца 56, которое имеет резистивный путь 48 вокруг кольца. Внешнее скользящее кольцо имеет скользящий контакт 82 в известном отношении к положению отверстия или канавки 84 скользящего кольца 58, находящийся в электрическом контакте с резистивным путем 48. Скользящий контакт и резистивный путь, таким образом, функционируют в качестве потенциометра, так что электрическое измерение между терминалами «+» и «-», электрически соединенными со скользящим контактом 82 и концом резистивного пути, будет идентифицировать положение отверстия или канавки вокруг кольцеобразной структуры. Эта информация о положении сообщается на ультразвуковую систему с целью идентификации плоскости траектории введения иглы, назначенной к сканированию посредством зонда и ультразвуковой системы. Множественные отверстия или канавки могут быть отдельно идентифицированы посредством соединения дополнительного сопротивления последовательно с соответствующим терминалом, так чтобы диапазон значений сопротивления, сообщаемых для одного отверстия, не накладывался на диапазон значений сопротивления для других.
Фиг. 6 представляет собой иллюстрацию отношений между зондом 12 для 3D визуализации, объемом 100, который может быть сканирован посредством зонда, и выбранной плоскостью 102 сканирования, в которой располагается зона 104 визуализации зонда. Когда осуществляется введение иглы 110 через отверстие или канавку в направляющей 14 иглы, иглу ограничивают до траектории, которая попадает в поле зрения под акустическим окном зонда. Поскольку зонд представляет собой 3D зонд для визуализации, он способен осуществлять сканирование множественных ориентаций плоскости в объеме 100. Датчик угла поворота направляющей 14 иглы идентифицирует конкретное отверстие, через которое осуществляется введение иглы, которое соответствует конкретной ориентации 102 плоскости сканирования, которая может быть визуализирована посредством 3D зонда для визуализации. Зонд 12 затем визуализирует идентифицированную ориентацию плоскости сканирования, как проиллюстрировано посредством области 104 сканирования сектора в плоскости 102. Врач-клиницист может далее отслеживать продвижение иглы 110 по мере того, как осуществляется ее введение по траектории введения в области 104 сканирования сектора до тех пор, пока кончик 112 иглы не достигнет целевой анатомической структуры.
Фиг. 7 иллюстрирует ультразвуковой зонд, направляющую иглы, а также ультразвуковую систему, сконструированные в соответствии с принципами настоящего изобретения. Ультразвуковая система 10 является сконфигурированной посредством двух подсистем, подсистемы 10A сбора и предварительной обработки данных и подсистемы 10B отображения. 3D ультразвуковой зонд 12 является соединенным с подсистемой сбора данных, которая включает в себя двухмерный матричный преобразователь 70 и формирователь 72 микропучков. Формирователь микропучков содержит схему, осуществляющую управление сигналами, применяемыми к группам элементов («вставкам») матричного преобразователя 70, и осуществляет некоторую обработку отраженных сигналов, принимаемых посредством элементов каждой группы. Формирование микропучков в зонде выгодным образом уменьшает количество проводников в проводе между зондом и ультразвуковой системой и описано в патенте США №5997479 (Savord и др.), а также в патенте США № 6436048 (Pesque), и обеспечивает электронное направление пучков на передачу и прием для 2D или 3D визуализации в режиме реального времени («вживую») с высокой скоростью передачи кадров.
Зонд 12 является соединенным с подсистемой 10A сбора данных ультразвуковой системы. Подсистема сбора данных включает в себя контроллер 74 формирования пучков, реагирующий на управление 36 пользователем и, для настоящего изобретения, на отпирающий сигнал, которые обеспечивают управляющие сигналы на формирователь 72 микропучков, отдавая зонду команды относительно синхронизации, частоты, направления и фокусировки пучков передачи и приема, а также плоскости или плоскостей, назначенных к сканированию посредством этих пучков. Контроллер формирования пучков также осуществляет управление системным формированием пучков отраженных сигналов, принятых подсистемой сбора данных, посредством управления аналого-цифровыми (A/D) преобразователями 18 и модулем 20 формирования пучков. Частично сформированные в форме пучка отраженные сигналы, принятые от зонда, усиливают посредством схемы 16 предварительного усилителя и TGC (управления временным усилением) в подсистеме сбора данных, затем оцифровывают посредством аналого-цифровых преобразователей 18. Оцифрованные отраженные сигналы затем формируют в полностью направленные и сфокусированные пучки посредством главного системного модуля 20 формирования пучков. Отраженные сигналы затем обрабатывают посредством процессора 22 изображений, выполняющего цифровую фильтрацию, обнаружение режима B и режима M, а также обработку данных по доплеровской частоте, и также способного выполнять другую обработку сигналов, такую как выделение гармоник, уменьшение уровня спеклов и другая желаемая обработка сигналов изображения.
Отраженные сигналы, сформированные посредством подсистемы 10A сбора данных, соединяют с подсистемой 10B отображения, которая осуществляет обработку отраженных сигналов для отображения в желаемом формате изображения. Отраженные сигналы обрабатывают посредством процессора 24 строк изображений, способного осуществлять дискретизацию отраженных сигналов, соединять сегменты пучков в законченные сигналы строки, а также усреднять сигналы строки для улучшения характеристик по соотношению «сигнал-шум» или устойчивости потока. Строки изображений для 2D изображения преобразуют по стандарту сканирования в желаемый формат изображений посредством преобразователя 26 стандарта сканирования, который выполняет преобразование R-тета, как это известно в данной области техники. Данный преобразователь стандарта сканирования может, таким образом, осуществлять форматирование прямоугольных форматов или форматов изображения сектора. Изображение затем сохраняют в запоминающем устройстве 28 изображений, из которого оно может отображаться на устройстве 38 отображения. На изображение в запоминающем устройстве также накладывают графику, назначенную к отображению вместе с изображением, которую генерируют посредством формирователя 34 графических изображений, реагирующего на управление 36 пользователем, так что сформированная графика является ассоциированной с изображениями устройства отображения. Отдельные изображения или последовательности изображений могут быть сохранены в запоминающем устройстве 30 видеоизображений во время фиксации контуров или последовательностей изображений.
Для объемной визуализации в режиме реального времени подсистема 10B отображения также включает в себя процессор представления 3D изображений, принимающий строки изображений от процессора 24 строк изображений для представления трехмерных изображений в режиме реального времени. 3D изображения могут отображаться на устройстве 38 отображения как «живые» (осуществляемые в реальном времени) 3D изображения или соединяться с запоминающим устройством 28 изображений для сохранения наборов 3D данных для более позднего рассмотрения и диагностирования.
В соответствии с настоящим изобретением, с процессором 52 идентификации плоскости соединяют сигнал идентификации плоскости сканирования, сформированный посредством направляющей 14 иглы, который идентифицирует плоскость сканирования, в которой будет проходить и может визуализироваться игла, введенная через направляющую иглы. Сигнал идентификации плоскости, сформированный посредством процессора идентификации плоскости, соединяют с формирователем 54 запускающего сигнала, который формирует отпирающий сигнал, предписывающий контроллеру 74 формирования пучков осуществлять управление сканированием желаемой плоскости сканирования, той плоскости, в которой располагается траектория введения иглы. Контроллер 74 формирования пучков осуществляет управление формирователем 72 микропучков с целью сканирования желаемой плоскости сканирования и формирования, из сканирования желаемой плоскости, отраженных сигналов, которые частично формируются в форме пучка посредством формирователя микропучков и соединяются с системным модулем 20 формирования пучков для завершения формирования пучков сканирующей строки в желаемой плоскости. Сканирующие строки плоскости обрабатывают посредством процессора 24 строк изображений и преобразуют по стандарту сканирования в двухмерное изображение идентифицированной плоскости, которое отображают на устройстве 38 отображения. Идентифицированная плоскость сканирования может отображаться в качестве одной тонкой плоскости в пределах разрешающей способности зонда и системы по толщине среза, но также может визуализироваться в качестве изображения толстого среза с толщиной плоскости больше, чем толщина одной тонкой плоскости, как описано в заявке на патент США № US 2010/0168580 A1 (Thiele и др.). Использование визуализации толстого среза обеспечивает игле возможность быть постоянно визуализированной в изображении, даже если ее траектория введения отклоняется от абсолютно прямой линии, до тех пор, пока траектория остается в пределах толщины изображения толстого среза.
Фиг. 8 и фиг. 9 иллюстрируют одну другую направляющую иглы по настоящему изобретению, через которую иглы 110 могут вводиться под различными углами наклона α, β и γ. Вид в поперечном сечении по фиг. 8 демонстрирует три иглы 110, 110' и 110", вводимые через различные отверстия 40 направляющей иглы, осуществляющие контроль направления игл по траекториям введения, наклоненные, соответственно, под углами Y, β и α. Каждый набор из трех отверстий в конкретном поворотном положении вокруг направляющей будет направлять иглы по траектории введения в одной и той же самой плоскости сканирования, две из которых, θ1 и θ2, продемонстрированы на фиг. 9 относительно центральной опорной плоскости 42. Направляющая 14 иглы по фиг. 8 и фиг. 9 обеспечивает врачу-клиницисту возможность доступа к целевой анатомической структуре на различных глубинах ниже зонда, идентифицируя в то же время плоскость сканирования каждой траектории введения.
При осуществлении заданной инвазивной процедуры желательным может быть осуществление доступа к анатомической структуре в теле с помощью одновременно нескольких инвазивных инструментов. Как иллюстрируют фиг. 4 и фиг. 9, в одно и то же самое время может быть введено множество игл в различных идентифицированных плоскостях сканирования, например, θ1 и θ2, или +θ и -θ. Когда используют две траектории введения через направляющую, направляющая будет сообщать идентификационную информацию двух различных ориентаций плоскости сканирования на процессор идентификации плоскости, который будет побуждать ультразвуковую систему 10 осуществлять попеременное сканирование различных плоскостей. Например, для микроволновой абляции целевой анатомической структуры могут быть использованы два различных инструмента, в этом случае врач-клиницист будет хотеть осуществлять визуальный контроль направления к цели обеих игл для абляции, так чтобы их кончики оказались в контакте с назначенной к абляции анатомической структурой. Фиг. 10 иллюстрирует ультразвуковое устройство отображения, демонстрирующее четыре различных изображения инвазивной процедуры с использованием направляющей иглы по настоящему изобретению. В этом примере используются и визуализируются в одно и то же самое время три различные иглы: 110α, 110β и 110γ. Игла 110α продемонстрирована на ультразвуковом изображении 202 плоскости сканирования траектории введения иглы 110α, и граница 202а этого изображения, для того, чтобы различить изображение иглы 110α, окрашена уникальным цветом, таким как синий. Идентификация и окрашивание иглы в ультразвуковом изображении может выполняться посредством метода сегментации, который конкретно идентифицирует иглу в изображении от окружающей ее ткани, как это описано, например, в опубликованном патенте США №2004/0002653 (Greppi и др.) и в документе «Enhancement of Needle Visibility in Ultrasound-guided Percutaneous Procedures» авторов S. Cheung и др., издание «Ultrasound in Med. & Biol.», том 30, №5 (2004), стр. 617-624. Схожим образом, в соответствующих 2D изображениях 204 и 206 их траекторий введения, продемонстрированы и выделены отличительными цветами 204а и 206а, такими как красный и желтый, иглы 110β и 110γ. Изображение 201 представляет собой полностью 3D объемное изображение области процедуры, которое демонстрирует процесс достижения целевой анатомической структуры всеми тремя иглами. В 3D изображении каждая игла является окрашенной в свой отличительный цвет (синий, красный или желтый), так чтобы врач-клиницист мог легко соотнести каждую иглу в 3D изображении с ее собственным 2D изображением плоскости введения. Каждую 2D плоскость изображения и полный 3D объем сканируют способом с временным уплотнением, причем сканирование отдельных плоскостей введения осуществляется с более высокой частотой повторений (и, вследствие этого, частотой смены кадров при отображении в режиме реального времени), чем у 3D изображения. Когда иглы попадают в их желаемые положения в целевой анатомической структуре, отдельные 2D изображения могут быть заморожены на экране, так чтобы все время для сбора данных было посвящено 3D визуализации, и процедура на целевой анатомической структуре может продолжать визуализироваться «вживую» в формате 3D.
Осуществление направляющей иглы и ультразвуковой системы по настоящему изобретению может сопровождаться использованием других насадок с целью оказания врачу-клиницисту помощи в планировании и выполнении процедуры введения иглы, такой как поддержка и направление врача-клинициста при введении иглы с целью обхода твердых тканей и критических анатомических структур, как это описано в заявке на патент США №61/587784, поданной 18 января 2012 года и озаглавленной «ULTRASONIC GUIDANCE OF A NEEDLE PATH DURING BIOPSY» (Kudavelly и др.). Обход жесткой ткани в траектории введения может помогать предотвращать отклонение от правильного направления и искривление иглы во время введения. Эта помощь в направлении может использоваться для планирования траектории введения до проведения процедуры или для обеспечения контроля направления, по мере того как осуществляется введение иглы.
Изобретение относится к медицинской технике, а именно к средствам ультразвуковой визуализации для направления введения иглы. Система содержит зонд для ультразвуковой 3D визуализации различных плоскостей объемной области, направляющую иглы с размерами, обеспечивающими возможность быть присоединенной к зонду для визуализации в предварительно определенной ориентации, при этом направляющая иглы имеет множество положений введения иглы для осуществления контроля её направления и формирует сигнал идентификации плоскости введения иглы в объемную область, и содержит ультразвуковую систему, соединенную с зондом и реагирующую на сигнал идентификации плоскости и управляющую 3D ультразвуковым зондом визуализации для формирования 2D изображения идентифицированной плоскости. Использование изобретения позволяет расширить зону визуализации целевой анатомической структуры и траектории введения иглы. 14 з.п. ф-лы, 10 ил.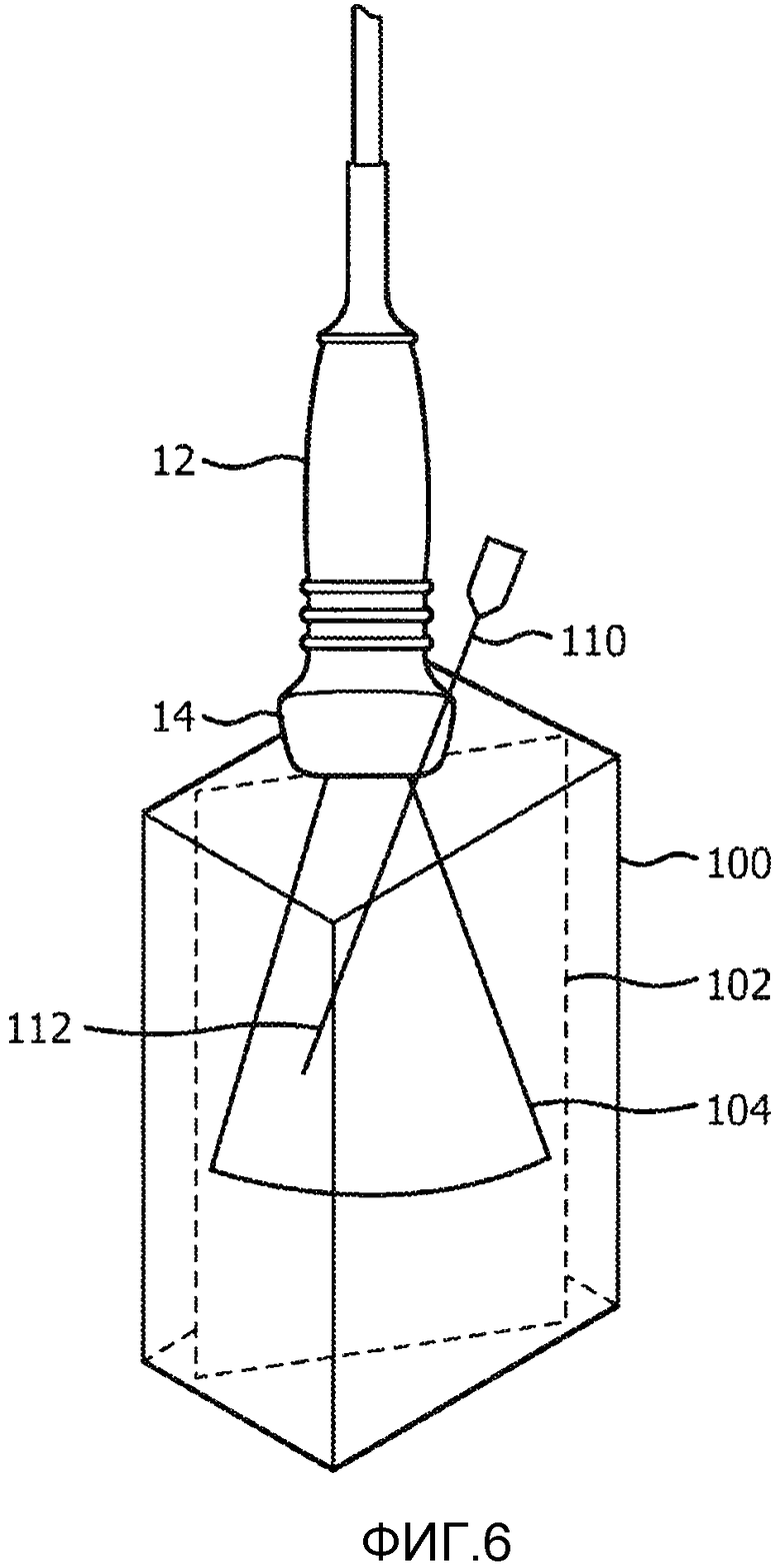
1. Ультразвуковая система визуализации, которая визуально направляет введение инвазивного устройства, такого как игла, содержащая:
зонд для ультразвуковой 3D визуализации, способный осуществлять визуализацию различных плоскостей объемной области;
направляющую иглы с размерами, обеспечивающими возможность быть присоединенной к зонду для визуализации в предварительно определенной ориентации, причем направляющая иглы имеет множество положений введения иглы для осуществления контроля направления иглы для введения в объемную область через различные плоскости введения иглы, причем направляющая иглы формирует сигнал идентификации плоскости, который идентифицирует плоскость введения иглы, вводимой в объемную область; и
ультразвуковую систему, соединенную с зондом и реагирующую на сигнал идентификации плоскости и управляющую 3D ультразвуковым зондом для визуализации для формирования 2D изображения идентифицированной плоскости.
2. Ультразвуковая система визуализации по п. 1, в которой направляющая иглы дополнительно содержит кольцеобразную структуру, присоединяющуюся к дистальному концу зонда для ультразвуковой 3D визуализации, и содержит множество выполненных под углом отверстий или канавок вокруг структуры, через которые осуществляется введение иглы.
3. Ультразвуковая система визуализации по п. 1, в которой направляющая иглы дополнительно содержит кольцеобразную структуру, присоединяющуюся к дистальному концу зонда для ультразвуковой 3D визуализации, причем структура имеет внутреннее кольцо, присоединяющееся к зонду, и внешнее скользящее кольцо, способное вращаться вокруг внутреннего кольца, причем скользящее кольцо имеет отверстие или канавку, положение которой может быть селективно установлено вокруг внутреннего кольца посредством вращения скользящего кольца.
4. Ультразвуковая система визуализации по п. 2, в которой направляющая иглы дополнительно содержит датчик угла поворота, реагирующий на введение иглы в заданном положении введения иглы для формирования сигнала идентификации плоскости.
5. Ультразвуковая система визуализации по п. 4, в которой датчик угла поворота дополнительно содержит оптический кодовый датчик.
6. Ультразвуковая система визуализации по п. 5, в которой множество положений введения иглы дополнительно содержат множество отверстий или канавок, расположенных вокруг присоединенного зонда;
причем оптический кодовый датчик дополнительно содержит источник света, освещающий отверстия или канавки, и множество оптических детекторов, ассоциированных с отверстиями или канавками,
причем детектор формирует сигнал идентификации плоскости, когда освещение отверстия или канавки перекрывается введенной иглой.
7. Ультразвуковая система визуализации по п. 4, в которой датчик угла поворота дополнительно содержит резистивный кодовый датчик.
8. Ультразвуковая система визуализации по п. 7, в которой резистивный кодовый датчик дополнительно содержит множество различных значений сопротивления, ассоциированных с различными положениями введения иглы, расположенными вокруг присоединенного зонда.
9. Ультразвуковая система визуализации по п. 8, в которой резистивный кодовый датчик дополнительно содержит потенциометр.
10. Ультразвуковая система визуализации по п. 1, в которой направляющая иглы дополнительно содержит множество положений введения иглы, выполненных под углом с различными наклонами относительно оси, расположенной под прямым углом к лицевой части зонда для ультразвуковой 3D визуализации.
11. Ультразвуковая система визуализации по п. 10, в которой множество положений введения иглы, выполненных под углом с различными наклонами, являются ассоциированными с одной и той же плоскостью введения иглы.
12. Ультразвуковая система визуализации по п. 1, в которой направляющая иглы дополнительно содержит беспроводную линию связи для передачи сигнала идентификации плоскости на ультразвуковую систему.
13. Ультразвуковая система визуализации по п. 1, в которой направляющая иглы дополнительно содержит проводное соединение с ультразвуковой системой для передачи сигнала идентификации плоскости на ультразвуковую систему и приема электрической мощности от ультразвуковой системы.
14. Ультразвуковая система визуализации по п. 1, в которой ультразвуковая система реагирует на идентификацию плоскости для осуществления управления зондом для ультразвуковой 3D визуализации для сканирования только идентифицированной плоскости введения объемной области.
15. Ультразвуковая система визуализации по п. 1, в которой ультразвуковая система реагирует на идентификацию плоскости для осуществления управления зондом для ультразвуковой 3D визуализации для сканирования и формирования изображения толстого среза объемной области, включающего в себя идентифицированную плоскость введения.
| US 2010240997 A1, 23.09.2010 | |||
| US 2009005687 A1, 01.01.2009 | |||
| WO 2007110076 A1, 04.10.2007 | |||
| EP 1958588 A2, 20.08.2008 | |||
| RU 2010124373 A, 27.12.2011. |

