Настоящее изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к ультразвуковым системам, выполняющим направляемое получение изображений с панорамным или расширенным полем зрения (EFOV).
Получение ультразвуковых изображений с двумерным расширенным полем зрения (EFOV) или панорамных изображений является полезным инструментом для визуализации больших или длинных структур (например, бедренная артерия, каротидная артерия), которые не могут быть полностью рассмотрены при традиционном получении ультразвуковых изображений. При получении двумерных (2D) панорамных ультразвуковых изображений большое количество двумерных изображений получают посредством ручного свиппирования зондом, имеющим одномерную матрицу ультразвуковых датчиков, по существу, вдоль плоскости двумерного изображения (азимутальный размер), как описано в патенте США 6442289 (Olsson и др.). Полученные перекрывающиеся изображения объединяются для создания панорамного изображения, используя результаты оценки движения пробника (зонда), которые обычно измеряются посредством определения регистрации между идущими последовательно перекрывающимися изображениями. Сверхдлинные изображения могут предпочтительно просматриваться на дисплее в широком формате изобретения, как показано в патенте США 6516215 (Roundhill). Одно из ограничений традиционного получения изображений с расширенным полем зрения, используя одномерный ультразвуковой датчик, состоит в том, что движение прослеживается только вдоль одной плоскости получения изображения, которая, как предполагается, выровнена с направлением движения. Если направление движения не выровнено с плоскостью получения изображения датчика, в панорамном изображении будет иметь место геометрическое искажение и потенциальная возможность выполнения точных измерений снижается.
Другой способ получения изображений длинных структур состоит в сканировании, выполняемом вручную. При ручном сканировании с помощью ультразвукового пробника (зонда) сканирование выполняется вручную, сканируя в направлении, перпендикулярном плоскости изображения (то есть с размерностью по высоте), чтобы получить ряд изображений из различных плоскостей, приблизительно параллельных друг другу. Эти изображения могут объединяться для создания трехмерного (3D) объема, известного как ручное трехмерное изображение. Ручное сканирование описано в патенте США 36, 564 (Schwartz и др.). Ручное трехмерное получение изображений обладает способностью отображать анатомические структуры из различных ориентаций и плоскостей вместо того, чтобы требовать от клинического врача умственно интерпретировать трехмерную ориентацию структуры из двумерных изображений. Ручное трехмерное сканирование может создавать объемы, размер которых ограничивается только размером доступных акустических окон и хранением данных ультразвуковой системы, и поэтому имеет несколько клинических преимуществ перед традиционным получением трехмерных ультразвуковых изображений, при котором размер объема ограничен максимальным механическим или электронным углом свиппирования пробника.
Если точные измерения расстояний или объемов должны быть сделаны из ручного трехмерного панорамного изображения, то при получении изображений должна делаться калибровка, чтобы размеры и ориентации структур были геометрически точными. При калиброванном получении трехмерных панорамных изображений слежение за движением зонда и реконструкция весьма важны для получения калиброванного объема. Слежение за ультразвуковым зондом обеспечивает оценки движения, непосредственно используемые для компенсации движения зонда во время свиппирования. Надежная трехмерная объемная реконструкция также важна, чтобы минимизировать потерю качества изображения, связанную с артефактами. Дополнительно, также важно обеспечивать обратную связь с пользователем в реальном времени, чтобы способствовать сканированию целевых структур.
Ручное получение изображений с использованием зонда с одномерной матрицей было предложено для получения трехмерных панорамных изображений, например, в патенте США 5899861 (Friemel и др.) и патенте США 6572549 (Jong и др.). При этом подходе движение зонда отслеживается, делая оценки коэффициента декорреляции спекл-структур в последовательно получаемых изображениях из различных угломестных плоскостей. Однако для спекл-структур последовательно получаемые изображения должны оставаться частично коррелированными, что не всегда может быть возможно, особенно во время быстрого свиппирования зондом. Кроме того, оценки движения, основанные на спекл-декорреляции, не очень достоверны и подвержены сильному влиянию артефактов, таких как те, которые дают яркие зеркальные отражатели. Для более надежного слежения за движением к зонду с одномерной матрицей могут присоединяться внешние позиционные датчики (например, магнитные или оптические), как описано в патенте США 6517491 (Thiele и др.). Однако эти устройства слежения страдают интерференцией и низкой чувствительностью и могут давать плохую точность. Подход также требует, чтобы дополнительное оборудование, которое будет присоединяться к зонду и системе, было нестандартным.
С недавнего времени механические пробники (зонды) с одномерной матрицей были вытеснены внедрением электронно управляемых пробников с двумерной матрицей. Двухмерный матричный датчик может электронными средствами сканировать объемную область в трех измерениях посредством фазированного управления пучками. Чтобы получить трехмерное изображение, нет необходимости механически свиппировать пробник по телу и в пробнике нет никаких движущихся частей. Пробник с двумерной матрицей может создавать трехмерные объемные изображения в реальном времени и может также получать небольшие трехмерные объемы, которые сшиваются вместе, чтобы создать изображение большего объема с координированным циклическим изображением кровотока, как описано в патенте США 5993390 (Savord и др.). Однако двумерные пробники имеют то же самое ограничение, что и механические пробники с одномерной матрицей, то есть поле зрения ограничивается областью под пробником.
Еще одним подходом к получению трехмерных изображений являются недавно предложенные зонды с I-пучком или E-пучком, содержащие первичную матрицу получения изображения и две или три смежные перпендикулярные следящие матрицы, как описано в патенте США 6102865 (Hossack и др.). Однако этот подход является ограниченным в том, что он может оценивать только движение зонда в заранее подготовленных направлениях, установленных ориентацией следящих матриц. Кроме того, такие системы дороги, так как многоэлементная матрица должна быть изготовлена в едином зонде и использоваться одновременно. Позиционная точность зонда ограничивается размерами следящих матриц, которые обычно намного меньше, чем матрицы для получения изображения.
В соответствии с принципами настоящего изобретения, многочисленные плоские изображения получаются, используя электронное управление пучком от двумерного зонда. Эти плоские изображения используются для получения расширенного поля зрения изображения или объема, одновременно следя за движением зонда в многочисленных направлениях. В предпочтительном варианте осуществления ручные трехмерные панорамные изображения создаются и отображаются с помощью двумерного матричного зонда, который может электронно управлять пучком в любой произвольной плоскости изображения. Ряд плоских изображений, составленных из сигналов в В-режиме и/или цветном допплеровском режиме (например, скорость, мощность и/или отклонение), получаемых от первичной плоскости, создается во время ручного свиппирования двумерного матричного зонда над целевыми объектами. Ультразвуковые данные от этой плоскости и, если желательно, от других плоскостей тоже, получаются и используются для слежения за движением зонда посредством вычисления регистрации между следующими друг за другом изображениями, полученными вдоль этих плоскостей. Оценки движения от каждой плоскости объединяются для нахождения общего вектора движения зонда. Полная оценка движения используется для компенсации движения зонда при реконструкции калиброванного объема из первичных плоских изображений. В соответствии с дополнительным аспектом настоящего изобретения, парциальные объемы отображаются во время свиппирования двумерного матричного зонда для получения обратной связи с пользователем в реальном времени. В другом варианте осуществления одно или более плоских изображений отображаются, чтобы показать процесс выполнения сканирования. Кроме того, изображения от первичной плоскости могут отображаться вместе с двумерным панорамным изображением, создаваемым из одной или более плоскостей оценки движения. В соответствии с другим аспектом настоящего изобретения, во время свиппирования пробника отображается значок, чтобы сообщить клиническому врачу о скорости и/или направлении движения зонда.
На чертежах:
Фиг.1 - блок-схема системы получения диагностических ультразвуковых изображений, соответствующей принципам настоящего изобретения.
Фиг.2 - двумерный матричный датчик, перемещаемый над кожей пациента.
Фиг.3 - получение ультразвуковой информации в двух плоскостях по мере перемещения двумерного матричного датчика.
Фиг.4 - получение ультразвуковой информации в трех плоскостях по мере перемещения двумерного матричного датчика.
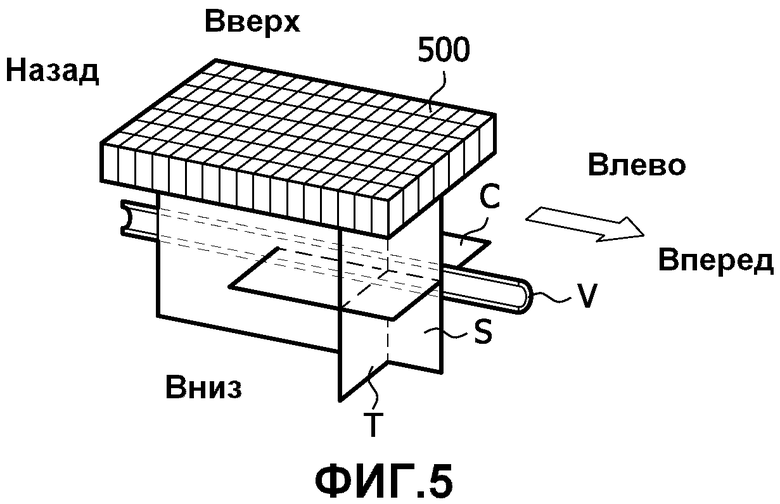
Фиг.5 - способ получения изображений, показанный на фиг.4, для отображения кровеносного сосуда увеличенной длины.
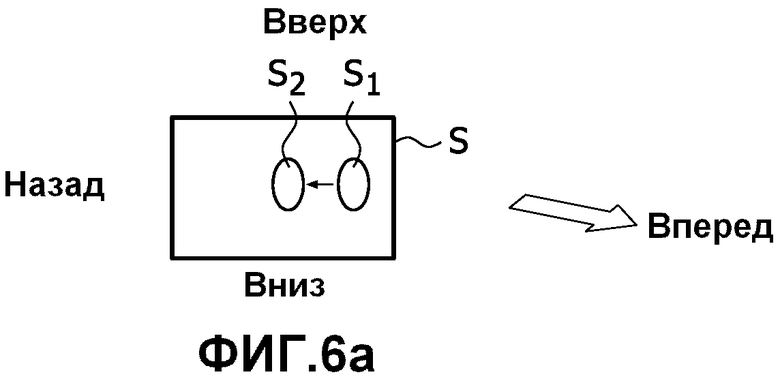
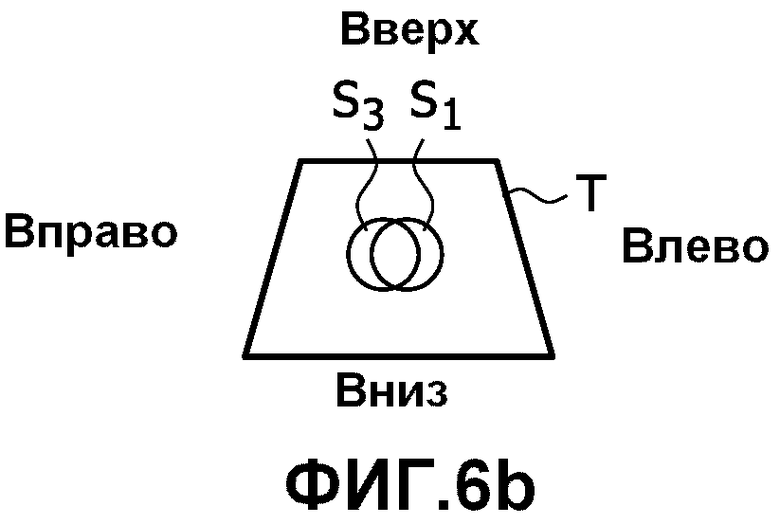
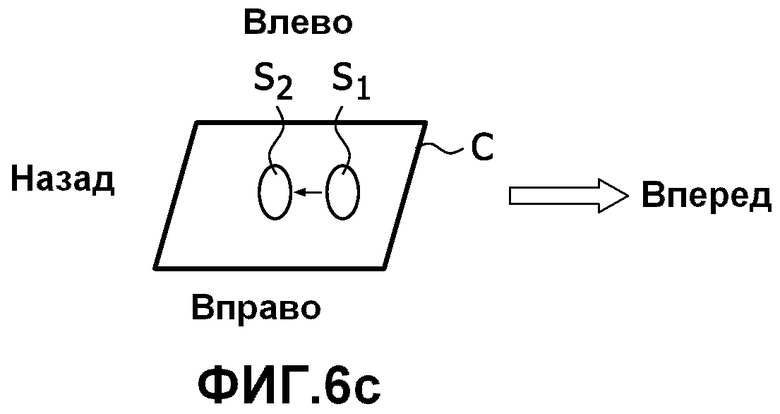
Фиг.6a-6c - изменение положения структур изображения в различных плоскостях по мере движения двумерного матричного датчика, получающего изображение.
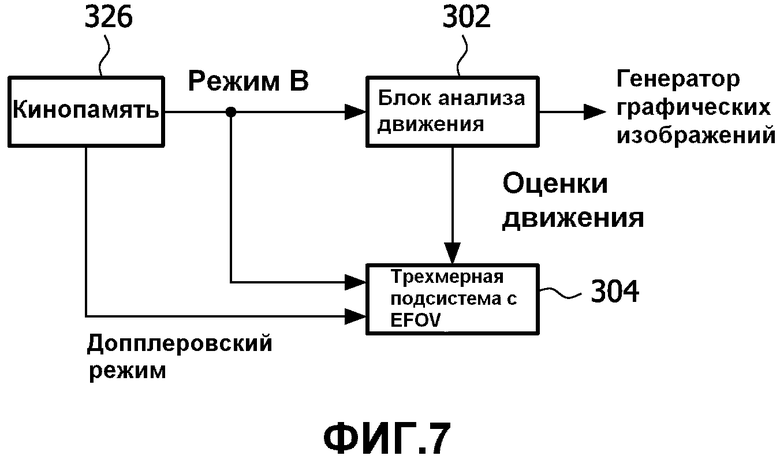
Фиг.7 - более подробная блок-схема компонент оценки движения ультразвуковой системы, показанной на фиг.1.
Фиг.8 - более подробная блок-схема подсистемы EFOV, показанной на фиг.7.
Фиг.9 - более подробная блок-схема устройства трехмерной объемной реконструкции, показанного на фиг.8.
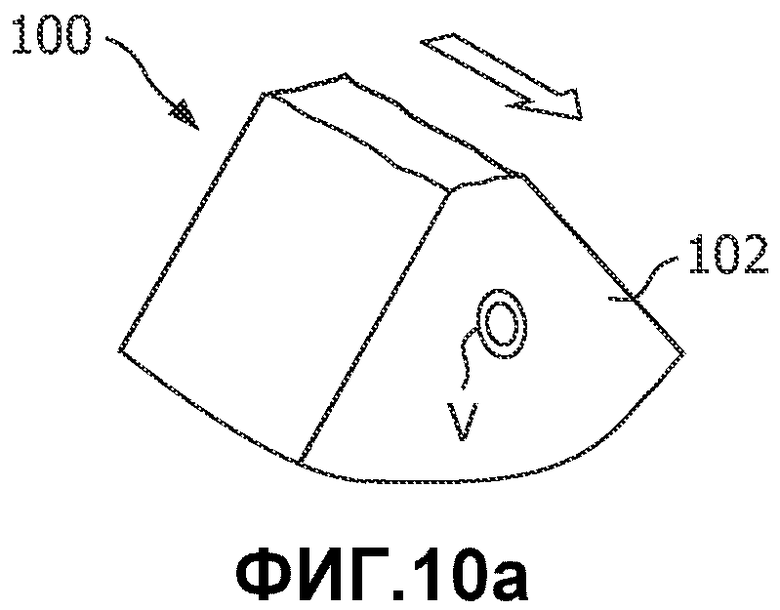
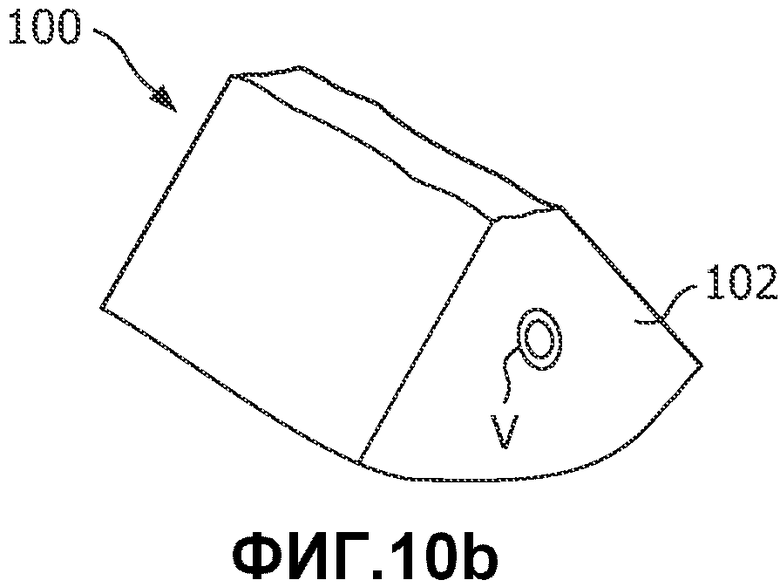
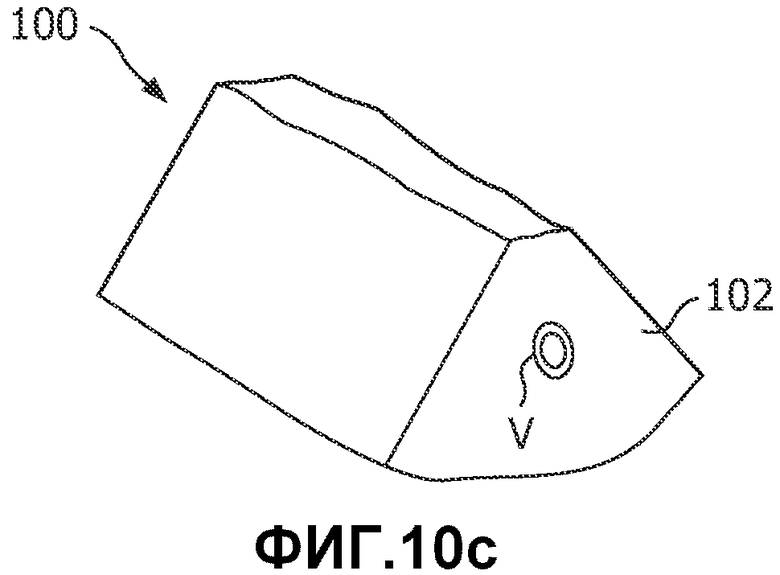
Фиг.10a-10d - получение трехмерного изображения EFOV, используя двумерный матричный зонд в соответствии с настоящим изобретением.
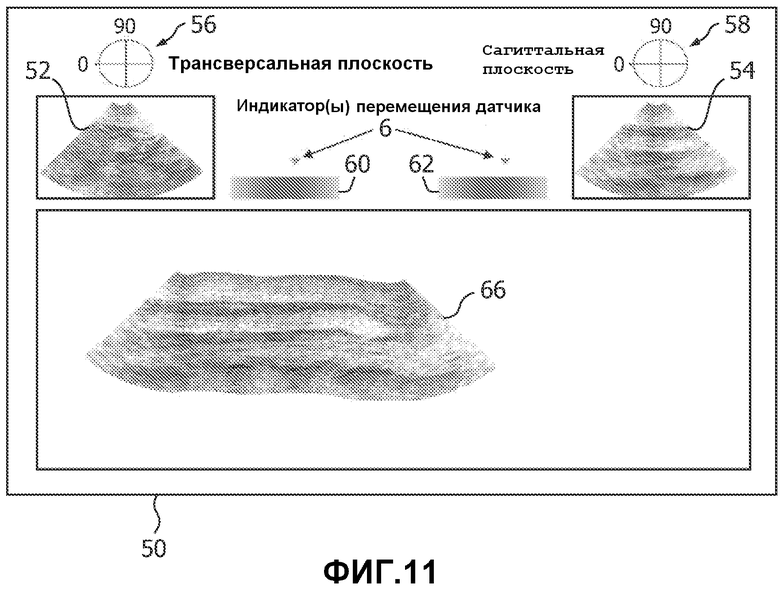
Фиг.11 - изображение, созданное ультразвуковой системой, соответствующей настоящему изобретению, с индикаторами движения зонда, указывающими скорость сканирования.
Фиг.12 - другое изображение, созданное ультразвуковой системой, соответствующей настоящему изобретению, с индикатором положения зонда, указывающим прохождение сканирования.
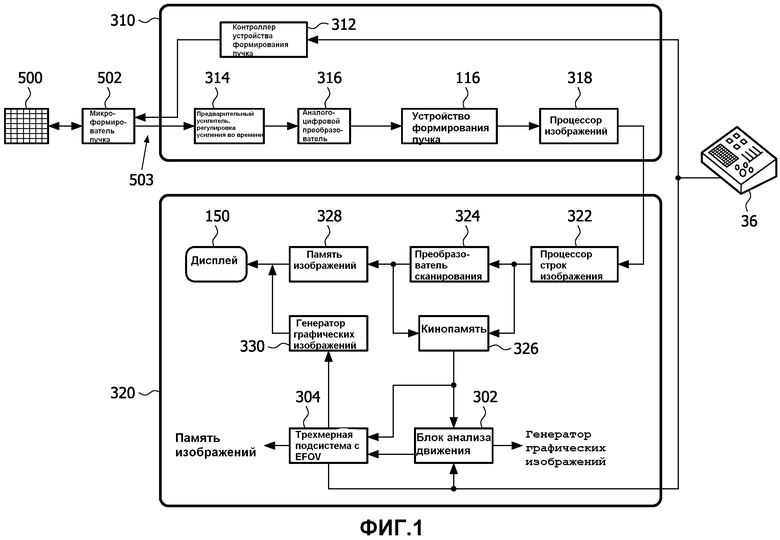
Со ссылкой сначала на фиг.1, ультразвуковая система, выполненная в соответствии с принципами настоящего изобретения, показана в форме блок-схемы. Зонд подключается к системе, содержащей двухмерный матричный датчик 500 и микроформирователь 502 пучка. Микроформирователь пучка содержит схему, управляющую сигналами, прикладываемыми к группам элементов ("пэтчам") матричного датчика 500, и выполняет некоторую обработку эхо-сигналов, принимаемых элементами каждой группы. Микроформирование пучка в зонде предпочтительно сокращает количество проводников в кабеле 503 между зондом и ультразвуковой системой и описано в патенте США 5997479 (Savord и др.) и в патенте США 6436048 (Pesque).
Зонд подключается к сканеру 310 ультразвуковой системы. Сканер содержит контроллер 312 формирования пучка, управляемый сигналами 36 управления пользователя, и обеспечивает сигналы управления на микроформирователь 502 пучка, подавая на зонд команды, относящиеся к синхронизации, частоте, направлению и фокусировке излучаемых пучков. Контроллер формирования пучка также управляет формированием пучка отраженных эхо-сигналов, принимаемых сканером с помощью управления его аналого-цифровыми преобразователями (A/D) 316 и устройством 116 формирования пучка. Эхо-сигналы, принятые зондом, усиливаются предварительным усилителем и схемой 314 TGC (регулирование усиления во времени) в сканере и затем оцифровываются аналого-цифровыми преобразователями 316. Оцифрованные эхо-сигналы затем устройством 116 формирования пучка формируются в полностью управляемые и сфокусированные пучки. Эхо-сигналы затем обрабатываются процессором 318 изображений, выполняющим цифровую фильтрацию, обнаружение в В-режиме и допплеровскую обработку, а также другую обработку сигналов, такую как разделение гармоник, снижение спекла через смешивание частот и другую желаемую обработку изображений.
Эхо-сигналы, созданные сканером 310, подаются на подсистему 320 отображения, обрабатывающую эхо-сигналы для показа в желаемом формате изображения. Эхо-сигналы обрабатываются процессором 322 строк изображения, способным осуществлять выборки эхо-сигналов, монтировать сегменты пучков в полные строчные сигналы и усреднять строчные сигналы для улучшения отношения "сигнал/шум" или постоянства потока. Строки изображения являются строками сканирования, преобразованными в желаемый формат изображения преобразователем 324 сканирования, выполняющим R-тета-преобразование, известное в технике. Затем изображение сохраняется в памяти 328 изображений, из которой оно может выбираться для отображения на дисплее 150. На изображение в памяти также накладываются графические изображения, отображаемые вместе с изображением, которые генерируются генератором 330 графических изображений, сигналами 36 управления, поступающими от пользователя.
Индивидуальные изображения или последовательности изображения могут храниться в кинопамяти 326 во время получения циклов или последовательностей изображений.
Для получения объемного изображения в реальном времени подсистема 320 отображения также содержит процессор представления трехмерного изображения в трехмерной подсистеме 304 с EFOV (более полно описано на фиг.8 и 9), которая принимает строки изображения от процессора 322 строк изображения для представления трехмерного изображения в реальном времени, соединенного с памятью 328 изображений для отображения на дисплее 150.
В соответствии с принципами настоящего изобретения трехмерная подсистема с EFOV позволяет получать изображения с расширенным полем зрения. Изображения с EFOV могут быть двумерными плоскими изображениями, как описано в упомянутом выше патенте Olsson и др. и Roundhill, или могут быть трехмерными изображениями. Изображения с EFOV собираются, оценивая движение зонда в блоке 302 анализа движения, используя данные изображений, предоставленные кинопамятью 326. Блок анализа движения может следить за перемещением зонда вдоль тела пациента, регистрируя данные последовательно получаемых изображений, например, с помощью подхода, названного "согласованием блоков MSAD", как описано в патенте США 6299579 (Peterson и др.). По желанию, могут использоваться другие способы анализа движения, такие как нежесткая регистрация тела. Способ согласования блоков вычисляет рассогласование между последовательно полученными изображениями, которые, по меньшей мере, частично накладываются друг на друга. Когда рассогласование изображений вычислено в различных плоских ориентациях, вектор рассогласования как по величине, так и по направлению может быть вычислен в трех измерениях с помощью блока 302 анализа движения. Вектор рассогласования предоставляет позиционную информацию подсистеме 304 с EFOV для относительного расположения изображений, получаемых для различных плоскостей по мере движения зонда. Когда следующие друг за другом изображения должным образом расположены относительно друг друга подсистемой с EFOV, создается геометрически точное двух- или трехмерное изображение с EFOV.
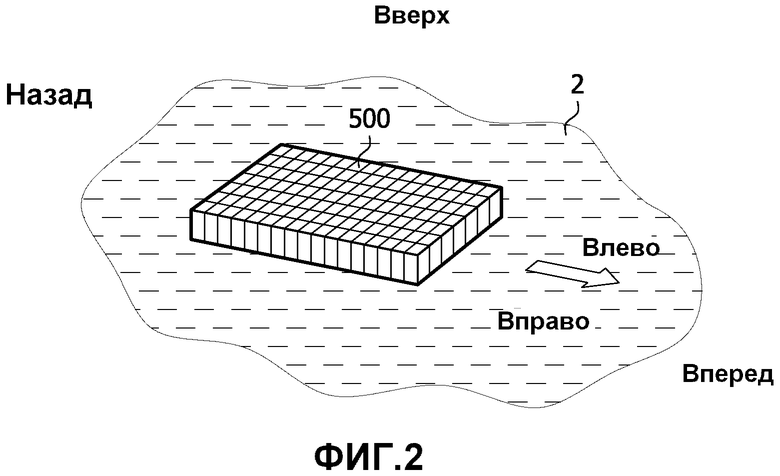
Способ получения изображения с EFOV, соответствующий настоящему изобретению, может быть понят более полно при обращении сначала к фиг.2, являющейся видом в перспективе и изображающей движение двумерного матричного зонда по мере получения изображения с EFOV. На чертеже показан двумерный матричный датчик 500 с внешним корпусом зонда и частью датчика, удаленной для ясности изображения. На этом чертеже двухмерный матричный датчик 500 движется вдоль поверхности кожи 2 пациента и по мере движения получает данные изображения. Двумерный матричный датчик двигается в направлении большой стрелки, которая указывает в направлении "вперед" (FRONT) и в направлении "назад" (BACK) движения зонда. Для любой другой стороны направления движения имеются направления "влево" (LEFT) и "вправо" (RIGHT).
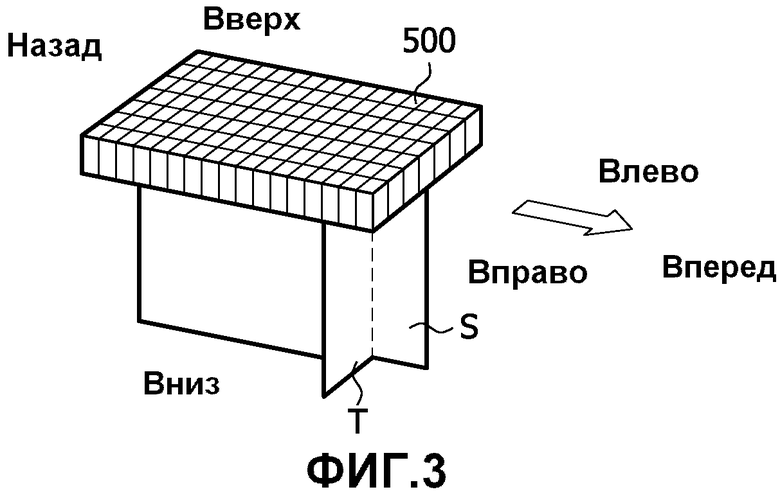
Помня об этих обозначениях направлений, теперь делается ссылка на фиг.3, где показаны две плоскости "S" (сагиттальная или продольная) и "T" (трансверсальная или поперечная), в которых получают изображения по мере движения зонда в направлении, указанном стрелкой. Две плоскости изображаются в этом примере как прямоугольные по форме, хотя в данном варианте осуществления у них могут быть и другие формы, такие как секторная или трапецеидальная форма. Две плоскости S и T видны как простирающиеся в направлении "вниз" (DOWN) от двумерного матричного датчика 500. Хотя двумерный матричный датчик 500 способен сканировать много больше плоскостей изображений и, конечно, полный объем под матричным датчиком, в этом варианте осуществления необходимо сканировать только две плоскости S и T. Необходимость сканировать только две плоскости означает, что изображения могут быть быстро получены в быстроследующей последовательности, чередуя или перемежевывая сканирование двух плоскостей. Высокая частота получения кадров означает, что между изображениями будет происходить относительно малое движение и будет иметь место значительное перекрытие содержания данных изображения последовательно получаемых изображений, улучшая способность находить схожесть в данных изображения и вычислять вектор движения и также улучшая осуществление пространственной выборки для последующей реконструкции калиброванного объема. Смещение между последовательными изображениями может быть точно оценено и геометрически точное изображение с EFOV может быть собрано посредством правильного определения местоположения изображений относительно друг друга.
В примере, показанном на фиг.3, могут быть сформированы два типа изображений с EFOV. Одно формируется из последовательности изображений в плоскости S, полученных по мере того как двумерный матричный датчик перемещается в направлении стрелки. Перемещение в направлении от задней стороны (BACK) к передней стороне (FRONT) будет отражаться в содержании последовательно получаемых изображений в S-плоскости. Движение в направлении вверх (UP) и вниз (DOWN) будет также отражено в содержании изображения плоскости S. Смещение между последовательными изображениями плоскости Т будет воспроизводить движение в направлениях влево (LEFT) или вправо (RIGHT), а также в направлениях вверх (UP) и вниз (DOWN). Таким образом, эти оценки смещения используются для создания вектора относительного смещения от одного изображения в плоскости S к следующему. Последовательность изображений в плоскости S затем накладывается с выравниванием и сшивается вместе, чтобы создать двумерное изображение с EFOV, у которого самый длинный размер направлен вдоль стрелки. Важно заметить, что, в отличие от традиционного изображения с EFOV, использующего одномерный датчик, в соответствии с принципами настоящего изобретения нет необходимости в том, чтобы движение зонда точно выравнивалось с плоскостью S. Даже если движение отклонится от этой плоскости, то это отклонение будет отслеживаться плоскостью Т, так что может быть получено хорошее калиброванное панорамное изображение.
Другим изображением с EFOV, которое может быть получено в примере, показанном на фиг.3, является трехмерное изображение с EFOV, скомпилированное из последовательно полученных изображений в плоскости Т. Вектор смещения между последовательно полученными изображениями в плоскости Т вычисляется из информации изображений в плоскостях S и T, как описано ранее, и затем используется, чтобы должным образом определить местоположение последовательных изображений в плоскости Т относительно друг друга. По мере того как продолжают получать изображения в плоскости Т в направлении стрелки, толщина трехмерного изображения в направлении стрелки растет вместе с тем, как все больше плоскостей Т последовательного смещения появляются впереди ранее полученных и позиционированных изображений. Трехмерное изображение с EFOV, таким образом, имеет свой самый длинный размер в направлении, перпендикулярном плоскости Т.
Возможно создавать оба изображения одновременно, поскольку плоские изображения получаются постоянно как для двумерных изображений с EFOV, так и для трехмерных изображений с EFOV. Например, расширенное объемное изображение может быть получено для ткани, пересекаемой последовательно получаемыми изображениями в плоскости Т, и расширенная плоскость среза под центром этого объема может быть получена с помощью последовательных плоскостей S с EFOV. Плоскости S и T нет необходимости связывать с конкретными размерами физической матрицы 500 датчиков, но изображения могут получаться с помощью плоскости S, ориентированной вдоль любого размера, и плоскости Т, перпендикулярной к ней. Нет необходимости центровать плоскость S под двумерной матрицей, как показано на фиг.3, но изображения могут получаться с любой стороны от центра или под углом наклона, чтобы формировать изображение с EFOV по-другому ориентированной плоскости разреза трехмерного объема трехмерного изображения с EFOV. В зависимости от выбора апертур для плоскостей S и T, плоскость Т не обязательно может быть перпендикулярна плоскости S.
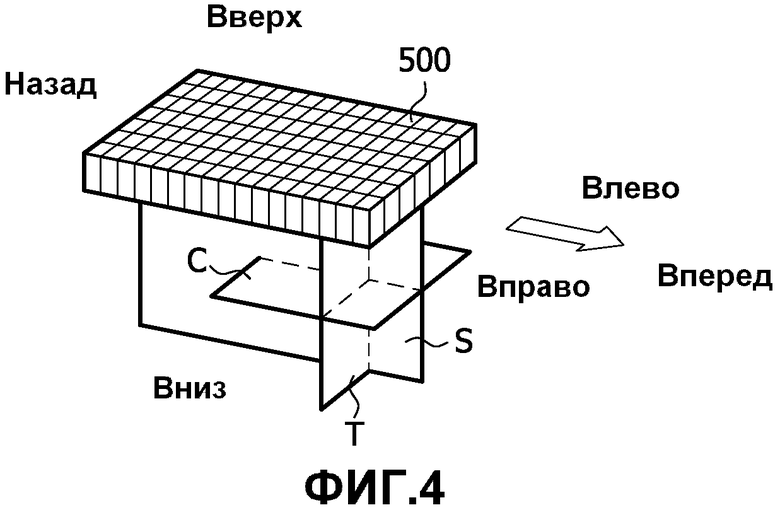
Показанный на фиг.3 пример добавляет третью плоскость получения, плоскость "C" (поперечного сечения), поскольку плоскости, параллельные основной плоскости двумерной матрицы, известны. Смещение между последовательно получаемыми изображениями в плоскости C вычисляется, как описано выше, и будет указывать движение двумерного матричного датчика в обоих направлениях "сзади вперед" и "слева направо". С помощью последовательных изображений в плоскости Т, предоставляющих информацию о смещении в направлениях вверх и вниз, видно, что трехмерный вектор смещения может быть вычислен без необходимости в любой информации от плоскости S. Это означает, что для двумерного изображения с EFOV, компилированного из изображений от плоскости S, получение плоскостей S может быть оптимизировано для получения изображений, и получение плоскости T и C может быть оптимизировано для измерения смещения. Альтернативно, если последовательные изображения в плоскости Т должны собираться в трехмерное изображение с EFOV, получение изображений в плоскостях C и S может быть оптимизировано для измерения смещения, в то время как получение плоскостей Т оптимизируется для получения изображений. Размеры изображений для измерения смещения могут быть сделаны меньшими или их межстрочный интервал увеличивается, например, в то время как плоскость изображения сохраняется большой и с высокой плотностью строк для изображения с высокой разрешающей способностью.
Как показано на фиг.4, если желательно, также возможно собирать двумерное изображение с EFOV из следующих друг за другом изображений в плоскости C. Когда изображение в плоскости C получено, данные объема между плоскостью C и зондом получаются без какой-либо дополнительной акустической передачи. Следующие друг за другом последовательности объемных данных могут выравниваться посредством трехмерной регистрации, чтобы найти шесть степеней свободы зонда (три для поступательного движения и три для вращения) во всем процессе получения, что обеспечивает точную реконструкцию трехмерного или двумерного изображения с EFOV.
Следует понять, что движение в направлении нормали к плоскости будет заставлять содержание изображения для плоскости изображения быстро декоррелироваться от одной плоскости к другой, делая оценку смещения в этом направлении проблематичной. Однако использование многочисленных, по-разному ориентированных плоскостей позволяет такому смещению по углу места происходить в плоскости другого изображения, где корреляция от изображения к изображению будет оставаться высокой и смещение все еще может быть оценено точно.
На фиг.5 показано сканирование с EFOV кровеносного сосуда V тела, используя плоскости T, S и C. В этом примере изображение с EFOV создается на значительной длине кровеносного сосуда V, позволяя диагностировать множество или все характеристики сосуда на едином изображении. По мере движения зонда с двумерным матричным датчиком плоскость S поддерживается на одном уровне с центром кровеносного сосуда V так, чтобы могло быть создано изображение плоскости среза вниз к вертикальному центру сосуда. Глубина плоскости C установлена так, что эта плоскость будет продолжать пересекать горизонтальный центр кровеносного сосуда, если сосуд остается в теле на постоянной глубине. Плоскость T продолжает пересекать кровеносный сосуд и его окружающую ткань по мере движения зонда. Такая схема может использоваться, например, для одновременного создания многочисленных изображений с EFOV, трехмерного изображения с EFOV кровеносного сосуда V из последовательных изображений в плоскости T и ортогонально ориентированных двумерных плоскостей среза из последовательных изображений в плоскости T и C.
На фиг.6a-6c показаны смещения в различных плоскостях, которые могут легко определяться из последовательностей по-разному ориентированных плоскостей. Как показано на фиг.6a, структура s1, которая появляется в направлении вперед в одном изображении плоскости S, будет казаться движущейся в направлении назад в следующем за ним изображении плоскости S, когда зонд движется в направлении стрелки, указанном малой стрелкой, между последовательными структурами s1 и s2. Смещения структуры в направлениях вверх и вниз также будут легко отличимы от относительных положений структуры в последовательных изображениях. На фиг.6b показано, что положение структуры s1 в одном изображении плоскости T изменяется на положение s2 в очередном изображении плоскости T, когда зонд движется в направлении влево. Смещения в направлениях вверх и вниз также могут быть легко отличимы от последовательных изображений плоскости T. Последовательные изображения плоскости C легко будут выявлять движение зонда в направлении спереди назад, а также влево и вправо, как показано на фиг.6c.
На фиг.7 приведена блок-схема, показывающая соединения между блоком 302 анализа движения и трехмерной подсистемой 304 с EFOV, показанной на фиг.1. В этом варианте осуществления кинопамять 326 хранит принятые плоские изображения перед их использованием для создания изображений с EFOV. Изображения в В-режиме используются для оценки движения в этом примере, потому что изображения в В-режиме не показывают пульсацию или короткие артефакты некоторых допплеровских сигналов. Блок анализа движения анализирует последовательные изображения в В-режиме и оценивает, что векторы смещаются от изображения к изображению. Эти оценки движения направляются в трехмерную подсистему с EFOV, где они используются для относительного выравнивания полученных изображений. Изображения, которые выравниваются, могут быть допплеровскими изображениями, изображениями в В-режиме или теми и другими, когда направляются в трехмерную подсистему с EFOV из кинопамяти. Блок анализа движения также создает информацию о движении для генератора 330 графических изображений, который использует информацию для отображения одного или более значков индикации движения при отображении изображения, как описано ниже.
На фиг.8 представлена блок-схема, показывающая дополнительные подробности трехмерной подсистемы 304 с EFOV, созданной в соответствии с принципами настоящего изобретения. Результаты оценки движения из блока 302 анализа движения подаются в двумерный построитель 310 мозаики, трехмерное допплеровское устройство 308 реконструкции объема и трехмерное устройство 306 реконструкции объема В-режиме. Изображения в В-режиме, хранящиеся в кинопамяти 326, подаются на двумерный построитель 310 мозаики, блок 302 анализа движения и трехмерное устройство 306 реконструкции в В-режиме. Допплеровские изображения подаются на трехмерное допплеровское устройство 308 реконструкции объема. Трехмерные устройства реконструкции объема функционируют тем же самым образом, что и трехмерный формирователь изображения, описанный в патенте США 5572291 (Schwartz), в котором трехмерное изображение формируется из множества двумерных изображений, ориентируемых относительно друг друга под управлением результатов оценок движения блока анализа движения. Одно или оба трехмерных представления, в зависимости от предоставленной информации изображения, подаются на подсистему 330 трехмерного отображения, где изображения ткани и потоков представлений в В-режиме и допплеровских представлений могут объединяться вместе для получения трехмерного изображения как ткани, так и потоков, как описано в патенте 5572291. Различные способы улучшения трехмерной визуализации могут быть также применены в подсистеме трехмерного изображения, такой как мультиплоскостная реконструкция и представление поверхности. Трехмерное изображение подается в память 328 изображений для отображения. Двумерный мозаичный построитель 210 объединяет частично перекрывающиеся кадры двумерных изображений, чтобы сформировать двумерное изображение с EFOV, как описано в вышеупомянутом выше патенте Olsson и др. Двумерное изображение с EFOV подается также в память 328 изображений также, откуда оно может отображаться независимо или вместе с трехмерным изображением с EFOV подсистемы 330 трехмерного отображения. Например, подсистема 330 трехмерного отображения может обеспечивать трехмерное изображение с EFOV объема в теле, тогда как двумерный мозаичный построитель обеспечивает двумерное изображение с EFOV плоского среза через трехмерный объем.
На фиг.9 представлена блок-схема, показывающая дальнейшие подробности устройства трехмерной реконструкции объема, соответствующего варианту осуществления настоящего изобретения. Показанное трехмерное устройство 306, 308 реконструкции объема может одновременно формировать трехмерные изображения как с прямыми, так и с обратными данными, отображаемыми посредством устройства 332 прямой реконструкции и устройства 334 обратной реконструкции. Трехмерный объем реконструируется с помощью прямого отображения, где входные данные непосредственно отображаются в выходные вокселы, в зависимости от матриц преобразования, обеспечиваемых посредством оценки движения. Хотя этот подход может обеспечить быструю реакцию потенциально с тем же самым решением, что и входное двумерное изображение, так как новые данные изображения добавляются к представленному объему, как только они получены, результирующее трехмерное изображение может иметь дыры в реконструированном объеме. С другой стороны, способ обратного отображения устройства обратной реконструкции использует матрицы обратного преобразования, так чтобы более подробные выходные вокселы создавались из входных данных посредством интерполяции. При трехмерной реконструкции с обратным отображением в реконструированном объеме появляется меньше дыр, но реакция медленнее, потому что реконструкция должна дожидаться всех входных сканирования прежде, чем данные между плоскостями изображения смогут быть интерполированы. Соответствующий способ интерполяции, который может использоваться, выражается следующим образом:

где Q 0 - интерполированное значение пикселя между двумя полученными пикселями Q 1 и Q 2, которые отделены от полученных пикселей на расстояния d 1 и d 2 соответственно. Альтернативно могут использоваться другие способы интерполяции более высокого порядка, такие как полиномная интерполяция и сплайновая интерполяция. Показанный вариант осуществления предлагает как прямую, так и обратную реконструкцию, так чтобы у пользователя был выбор более быстрой или более подробной реконструкции для отображения.
На фиг.10a-10d представлено, как трехмерное изображение с EFOV выглядит на дисплее ультразвуковой системы по мере сканирования пациента. По мере того как зонд движется в направлении, указанном стрелкой на фиг.10a, плоскости изображения, которые делят пополам кровеносный сосуд V, последовательно добавляются к передней поверхности сканируемого и отображаемого объема 100. По мере того как зонд продолжает свое перемещение вдоль кожи пациента, все больше плоскостей оказываются сканированы и добавлены к передней стороне объема, и объем растет в этом измерении, как показано в более длинном объеме 100 с EFOV 100 на фиг.10b. По мере того как зонд движется еще дальше, все больше плоскостей добавляются к объему с передней стороны, и объем растет все больше, как показано на фиг.10c. Как ранее объяснялось, каждая новая плоскость располагается относительно предыдущих плоскостей объема, оценивая движение и, следовательно, смещение от последней полученной плоскости до текущей. Эта информация смещения может быть вычислена из данных изображения одной или более ортогональных плоскостей сканирования, таких как плоскость изображения C или S, как показано на фиг.3, 4 и 5. Каждая вновь полученная плоскость, таким образом, добавляется к объему с учетом ее правильного геометрического соотношения с ранее полученными плоскостями. Результирующий объем, таким образом, геометрически точен и способен поддерживать количественные результаты измерений структуры, показанной в объеме. На фиг.10d показано реальное трехмерное изображение с EFOV, полученное и созданное с настоящим изобретением. (Для ясности изображения на фиг.10d диапазон черно-белых полутонов в пикселях изображения был изменен на обратный относительно его нормального черно-белого диапазона.)
На фиг.11 показан дисплей 50 EFOV ультразвуковой системы, созданной в соответствии с принципами настоящего изобретения, который обеспечивает руководство для клинического врача, перемещающего ультразвуковой зонд для получения изображения с EFOV. В этом примере двумерное изображение 66 с EFOV компилируется из последовательности составляющих изображений, полученных в сагиттальной плоскости S на фиг.3. По мере движения зонда составляющие изображения непрерывно получаются как в сагиттальной S, так и в трансверсальной T плоскостях. Изображения в обеих плоскостях используются блоком 302 анализа движения, чтобы отслеживать перемещение зонда. Некоторые или все трансверсальные и сагиттальные составляющие изображения показаны в верхней части дисплея, где значком 52 обозначено недавно полученное изображение трансверсальной плоскости и значком 54 - недавно полученное изображение сагиттальной плоскости. Графические значки 56 и 58, созданные генератором 330 графических изображений, отображаются над составляющими изображениями 52 и 54 и содержат полоску, которая выделяется цветом, чтобы указать соответствующую ориентацию плоскости. В этом примере указана такая ориентация, как если бы плоскость рассматривалась по краю сверху датчика 500.
В соответствии с принципами настоящего изобретения, в центре дисплея 50 показаны два индикатора 6 движения зонда. Каждый индикатор движения зонда имеет цветную полоску 60, 62, которая очерчивает диапазон, и небольшой треугольник (указанный стрелками), указывающий точку в диапазоне. В этом примере каждый индикатор движения зонда предоставляет клиническому врачу индикацию скорости, с которой движется зонд, причем два показанных индикатора служат соответственно для трансверсального и сагиттального движения. Положение графического треугольника над каждой полоской вычисляется из смещения от кадра к кадру, определяемого блоком 302 анализа движения 302, и известных времен, в которые были получены кадры. Знание этих значений времени и расстояния позволяет проводить прямое определение скорости в данном направлении. В этом примере, в то время как клинический врач выполняет сканирование с EFOV, перемещая зонд в сагиттальном направлении вперед (FRONT), как показано на фиг.3, индикатор трансверсального движения сообщает клиническому врачу, движется ли его зонд по прямой линии вдоль тела или отклоняется влево (LEFT) или вправо (RIGHT). Когда треугольник остается в центре над цветной полоской 60, зонд в этом примере движется по прямой линии в направлении вперед (FRONT). Это означает, что каждое последующее сагиттальное составляющее изображение, используемое для формирования изображения 66 с EFOV, находится, по существу, в одной и той же плоскости изображения. Но если зонд начинает двигаться влево (LEFT) или вправо (RIGHT), последовательные составляющие изображения не будут лежать в одной плоскости и треугольник будет соответственно двигаться влево или вправо от центра цветной полоски, указывая на это отклонение движения. Чем быстрее зонд движется влево или вправо, тем больше отображаемое отклонение треугольника от центра цветной полоски. Когда пробник возобновляет движение по прямой линии в направлении вперед (FRONT), треугольник будет возвращаться и снова оставаться в центре.
Индикатор сагиттального движения зонда, содержащий цветную полоску 62, в этом примере будет указывать скорость в направлении FRONT (вперед). Прежде, чем начнется сканирование и когда зонд неподвижно расположен на пациенте, треугольник над цветной полоской находится в крайнем левом положении, соответствующем точке нулевой скорости. По мере того как клинический врач начинает перемещать зонд и его скорость увеличивается, треугольник начинает двигаться вправо, чтобы указывать скорость пробника в сагиттальном направлении FRONT. Для однородного изображения с EFOV желательно двигать зонд с постоянной скоростью, так чтобы составляющие изображения получались, по существу, с равномерно разделенными временными и пространственными интервалами. Используя параметры, доступные в данном варианте осуществления, такие как желаемая длина изображения, объем доступной кинопамяти, величина перекрытия составляющих изображений и т.п., клинический врач может настроить свою систему таким образом, чтобы треугольник находился в центре цветной полоски, когда зонд движется с желаемой скоростью. Таким образом, чтобы сканировать прямое анатомическое пространство с желаемой скоростью, клинический врач должен следить только за тем, что оба треугольника по мере перемещения пробника оставались в центре над их соответствующими цветным полосками. Поддерживая такое расположение треугольников, клинический врач будет получать желаемое высококачественное изображение с EFOV. Поскольку некоторые пользователи могут внимательно следить за отображаемым изображением во время его получения, также возможно обеспечить звуковой аварийный сигнал, такой как звонок, когда пробник движется слишком быстро или слишком медленно.
Следует понимать, что один или оба индикатора движения зонда могут характеризоваться в единицах измерения, отличных от скорости. Например, клинический врач может принять решение получать изображение с EFOV на расстоянии 50 см по телу. Полоска 62 индикатора сагиттального движения зонда может тогда быть установлена на индикацию прохождения процесса на этом расстоянии, начинающуюся с нуля на левой стороне цветной полоски 62 и продолжающуюся до перекрытия расстояния в 50 см вправо. По мере того как клинический врач начинает сканирование, треугольник будет продолжать двигаться вместе с перемещением зонда от его начальной точки. Когда треугольник пройдет весь путь до правого конца цветной полоски, клинический врач будет знать, что 50 см сканирования были закончены. Другой единицей измерения, в которой может выражаться движение зонда, является, например, время. На фиг.12 показан второй дисплей 50 с EFOV ультразвуковой системы, созданной в соответствии с принципами настоящего изобретения, который обеспечивает руководство для клинического врача, перемещающего ультразвуковой зонд для получения изображения с EFOV. В этом примере дисплей не показывает изображение с EFOV по мере того как оно формируется, здесь показываются только составляющие изображения 52 и 54 по мере того как они получаются. Это те составляющие изображения, которые используются блоком анализа движения, чтобы следить за движением зонда. Как и в предыдущем примере, значки 56, 58 ориентации плоскости показываются над соответствующими составляющими изображениями 52, 54.
В области дисплея над составляющими изображениями отображается графическая трасса пути, проходимого зондом по мере выполнения сканирования с EFOV. В этом примере трасса 70 образуется последовательностью мелких точек. Стрелки ориентации под трассой 70 указывают трансверсальное (слева направо) и сагиттальное (сзади вперед) направления. Трасса 70 создается из результатов определения перемещений, полученных блоком 302 анализа движения. Последовательность кружков 72 помещена ниже вдоль трассы 70 и отмечает приращения по 1 см вдоль пути, обозначенного трассой. Альтернативно, кружки 70 могут быть помещены после того, как заданное количество составляющих кадров было получено, или после того, как другое приращение времени было введено во время сканирования, давая клиническому врачу ощущение равномерности движения зонда. В конце трассы 70 большая точка 8 указывает текущее положение зонда во время его движения. Путь траектории 70 может быть связан с конкретной точкой матрицы, например, полученной при использовании оси пересечения плоскостей S и T и ее точки начала координат на двумерной матрице в качестве опорной точки начала отсчета местоположения зонда.
В этом примере трехмерное изображение с EFOV компилируется из последовательности трансверсальных плоскостей 52. В этом показанном на чертеже примере объем сканируемой ткани содержит кровеносный сосуд V, показанный в боковом сечении в изображении 52 трансверсальной составляющей и в продольном сечении в изображении 54 сагиттальной составляющей. Клинический врач может направлять движение зонда так, чтобы поддерживать боковое сечение кровеносного сосуда V центрованным в середине каждого последующего изображения 52 трансверсальной составляющей, как показано в чертеже, при том, что получение последовательности изображений 54 сагиттальной составляющей продолжается, чтобы показать основную продольную плоскость разреза кровеносного сосуда V. Клинический врач, таким образом, получает указания при получении трехмерного изображения с EFOV, которое полностью охватывает кровеносный сосуд V. После того как получение изображений с учетом указаний закончено, клинический врач может переключиться на просмотр трехмерного изображения с EFOV, такого, как показано на фиг.10d.
Хотя предпочтительный вариант осуществления использует пробник с двумерным матричным датчиком, который электронным образом управляет пучками над желаемыми плоскостями изображения по мере движения зонда, следует понимать, что сканирование с EFOV и получение изображений могут также выполняться с помощью механического трехмерного сканирующего зонда, который в зонде качает одномерную матрицу взад-вперед по мере движения зонда. Например, трехмерный механический зонд, показанный в публикации патента США 2004/0254466, может использоваться для сканирования с EFOV в соответствии с настоящим изобретением. Каждый раз, когда движущаяся одномерная матрица достигает заданного положения при его колебательном качании, изображение может быть получено в ориентации плоскости изображения этого положения матрицы. Один или несколько соседних элементов матрицы могут действовать непрерывно, чтобы непрерывно сканировать ортогональную плоскость по мере того, как колеблется матрица. По мере того, как зонд движется вдоль кожи пациента, при этих двух получениях будут непрерывно сканироваться две различные плоскости по мере того, как зонд перемещается при сканировании с EFOV.



Ультразвуковая диагностическая система получения изображений создает изображение с расширенным полем зрения (EFOV). Трехмерный зонд для получения изображения перемещается вдоль кожи пациента над анатомией, которая должна быть введена в изображение с EFOV. По мере перемещения зонда изображения получают из множества по-разному ориентированных плоскостей изображения, таких как сагиттальная плоскость и трансверсальная плоскость. По мере того как зонд перемещается, данные изображения следующих друг за другом плоскостей с одной из ориентаций сравниваются, чтобы оценить движение зонда. Эти оценки движения используются для размещения последовательности изображений, полученных в одной из ориентаций точно относительно друг друга в формате отображения с EFOV. Оценки движения также используются для отображения графики на экране дисплея, которая указывает пользователю прогресс проведения сканирования по мере движения зонда. Прогресс может указываться в единицах измерения скорости зонда, пройденного расстояния или пути, проходимого движущимся зондом. 14 з.п. ф-лы, 12 ил.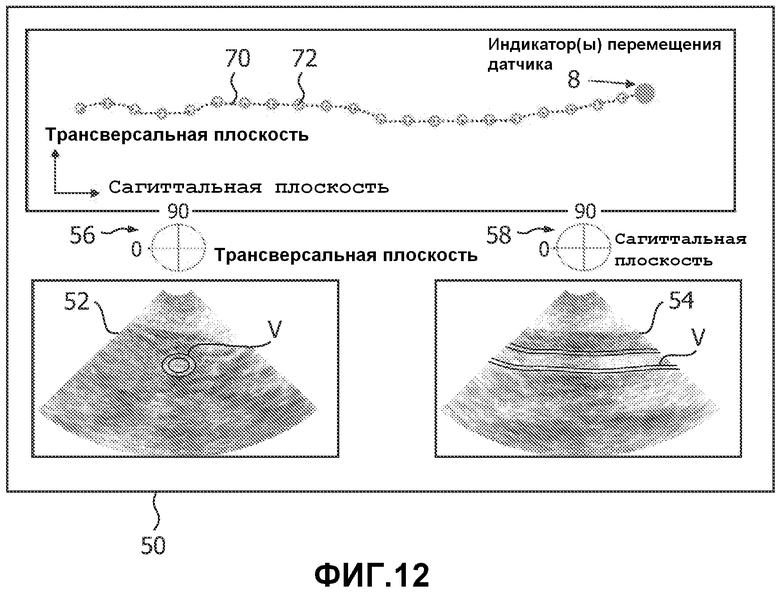
1. Ультразвуковая диагностическая система получения изображения, создающая направляемое изображение с расширенным полем зрения (EFOV), содержащая:
ультразвуковой зонд, содержащий матричный датчик, который может двигаться вдоль поверхности объекта в направлении вперед;
устройство формирования пучка, подсоединенное к матричному датчику, которое управляет зондом, чтобы периодически сканировать множество плоскостей изображения в различных ориентациях по мере движения зонда вдоль поверхности в направлении вперед;
процессор изображений, управляемый сигналами, принимаемыми от матричного датчика, чтобы формировать последовательность изображений по мере движения зонда;
блок анализа движения, управляемый последовательностью изображений, создающий оценки движения зонда;
подсистема с EFOV, управляемая в ответ на результаты оценки движения зонда, действующая для создания изображения с EFOV из последовательности изображений;
индикатор движения зонда, управляемый блоком анализа движения, который создает индикацию движения зонда в направлении вперед и в направлении, трансверсальном к направлению вперед; и
дисплей, управляемый подсистемой EFOV и индикатором движения зонда, для отображения индикатора движения зонда по мере того, как движется зонд и изображения EFOV.
2. Ультразвуковая диагностическая система получения изображений по п.1, в которой индикатор движения зонда создает индикацию скорости движения зонда.
3. Ультразвуковая диагностическая система получения изображений по п.2, в которой индикатор движения зонда создает индикацию скорости движения зонда в направлении вперед, в котором пользователь намечает перемещать зонд, и в направлении, латеральном к направлению вперед.
4. Ультразвуковая диагностическая система получения изображений по п.1, в которой индикатор движения зонда создает индикацию расстояния, пройденного зондом.
5. Ультразвуковая диагностическая система получения изображений по п.2, в которой, индикатор движения зонда содержит дисплейную графику, показывающую отклонение движения зонда от номинального пути прохождения.
6. Ультразвуковая диагностическая система получения изображений по п.2, в которой номинальный путь прохождения содержит направление вперед и трансверсальное направление и является латеральным к направлению вперед.
7. Ультразвуковая диагностическая система получения изображений по п.2, в которой индикатор движения зонда содержит дисплейную графику, указывающую скорость движения зонда относительно нулевой скорости.
8. Ультразвуковая диагностическая система получения изображений по п.1, в которой индикатор движения зонда и изображение с EFOV отображаются вместе по мере движения зонда.
9. Ультразвуковая диагностическая система получения изображений по п.1, в которой индикатор движения зонда содержит графическое изображение пути прохождения зонда по мере его движения вдоль поверхности.
10. Ультразвуковая диагностическая система получения изображений по п.9, в которой графическое изображение пути прохождения содержит индикаторы приращения пути.
11. Ультразвуковая диагностическая система получения изображений по п.2, в которой индикаторы являются количественными показателями единиц измерения расстояния, или времени, или количества полученных изображений по мере движения зонда.
12. Ультразвуковая диагностическая система получения изображений по п.2, в которой графическое изображение пути прохождения содержит графическую маркировку текущего положения зонда относительно пути прохождения.
13. Ультразвуковая диагностическая система получения изображений по п.1, в которой дисплей дополнительно содержит область отображения составляющих изображений, в которой отображается недавно полученное изображение, используемое для создания изображения с EFOV.
14. Ультразвуковая диагностическая система получения изображений по п.1, в которой дисплей дополнительно содержит область отображения составляющих изображений, в которой отображается недавно полученное изображение, используемое для создания оценки движения зонда.
15. Ультразвуковая диагностическая система получения изображений по п.13, в которой дисплей дополнительно содержит вторую область отображения составляющих изображений, в которой отображается недавно полученное изображение, используемое для создания оценки движения зонда, в которой первое и второе составляющие изображения получаются с помощью ультразвукового зонда из по-разному ориентированных плоскостей изображения.
| US 5782766 A, 21.06.1998 | |||
| US 6102865 A, 15.08.2000 | |||
| US 5899861 A, 04.05.1999 | |||
| US2002045825 A1, 18.04.2002 | |||
| JP2003190165 A, 08.07.2003 | |||
| US6352508 B1, 05.03.2002 |

