Область техники, к которой относится изобретение
Настоящее изобретение относится к системам обеспечения безопасности дорожного движения, служащим для предотвращения столкновений участников дорожного движения на аварийно-опасном участке дороги, в частности к устройствам помощи водителям транспортных средств, и может быть использовано для обеспечения безопасного проезда пересечений дорог (перекрестков, железнодорожных переездов, пешеходных переходов), а также участков дорог с ограниченной видимостью.
По статистическим данным, самыми распространенными видами дорожно-транспортных происшествий (далее - ДТП) являются наезд на пешехода (удельный вес таких ДТП составляет более 40%) и столкновение транспортных средств (более 20%). Количество аварий, произошедших на перекрестках, также довольно велико и составляет свыше 40% всех ДТП. При этом основными причинами, за исключением самонадеянного поведения водителей транспортных средств, являются недостаточная и/или ограниченная видимость. Непросматриваемые перекрестки, перекрестки, не оборудованные светофорами (например, на загородных дорогах), являются особенно опасными, так как водители могут отвлечься или не заметить друг друга. Проблема предотвращения таких аварий является международной. Особенно актуальна задача прогнозирования аварийных ситуаций, связанных со столкновением участников дорожного движения.
Уровень техники
Известно множество технических решений для предотвращения столкновений. К примеру, известно устройство, измеряющее скорость приближающегося к перекрестку транспортного средства (далее - ТС) и управляющее длительностью интервала переключения желтого сигнала светофора на запрещающий красный, предлагаемое бельгийской компанией «Traficon» [1]. В случае если водитель ТС, движущийся в прямом направлении, не смог вовремя остановиться и начал пересечение перекрестка, система увеличит временной интервал горения желтого сигнала, сдерживая, таким образом, поперечный поток ТС.
Известна процедура расчета продолжительности смены сигнала для водителей, оказавшихся в зоне дилеммы, в зависимости от особенностей вождения, скорости передвижения ТС, состояния дорожного полотна, метеоусловий и других параметров [], разработанная специалистами из Технологического Университета в Вирджинии. На основе этих данных формируют сигнал, индивидуально настроенный на время реакции водителя и информирующий его о скорой смене сигнала светофора. Сигнал отображается на экране, расположенном в салоне автомобиля. Подобные системы используются за рубежом на высокоскоростных магистралях, где тормозной путь обычно длинней, а светофор на перекрестке не виден вплоть до последних секунд.
Данные технические решения позволяют снизить риск возникновения дорожно-транспортных происшествий на перекрестках, но не позволяют предупреждать водителей об опасности столкновения. Кроме того, эти системы не функциональны на нерегулируемых перекрестках, а также участках дорог с ограниченной видимостью.
Известно оптико-электронное устройство предупреждения столкновений, расположенное на ТС и информирующее в автоматическом режиме водителя о возможном столкновении ТС с препятствием и анализирующее состояние водителя (спит/не спит) для предупреждения засыпания за рулем [3].
Данное устройство включает в себя достаточно большое число оптико-электронных датчиков с возможностью получения изображений перед ТС и позади него, работа которых напрямую зависит от чистоты их рабочих поверхностей, что является значительным недостатком при эксплуатации устройства.
В документе [4] описана система, позволяющая водителю ТС видеть на экране монитора 2D-карту, на которой отображены характеристики, расположение, скорость и ускорение транспортных средств, перемещающихся вблизи него.
Данное техническое решение позволяет избежать столкновений в случаях попадания других ТС, велосипедистов и пешеходов в так называемую мертвую зону, но при пересечении перекрестка ее использование затруднительно, так как водитель в этом случае будет должен каждый раз отвлекаться от управления ТС, чтобы изучить информацию, отображенную на экране.
Также известны системы взаимодействия автомобиля и дорожной инфраструктуры V2I, обеспечивающие водителей информацией, необходимой для повышения безопасности дорожного движения. К примеру, известна система DSSS (Driver safety support system), построенная по принципу V2I, использующаяся в настоящее время в Токио (Япония) [5,6]. Система представляет собой набор датчиков, установленных вблизи перекрестка и на перекрестке, обеспечивающих фиксацию факта присутствия автомобиля на дорожном полотне при его подъезде к перекрестку. Система регистрирует все подъезжающие к перекрестку автомобили и информирует водителей о наличии помехи слева или справа на подъезде к перекрестку.
К недостаткам системы можно отнести то, что она производит только фиксацию факта нахождения ТС на поперечном направлении перед перекрестком без учета динамики его движения. При этом используемый в системе измеритель скорости направлен на подъезжающие к перекрестку ТС. Таким образом, информация о координатах и скорости ТС на самом перекрестке не может быть получена. Кроме того, система не позволяет получать данные о траекториях движения каждого ТС в зонах контроля при подъезде к перекрестку и непосредственно на самом перекрестке. Отсутствие этих данных не позволяет объективно оценить степень опасности и своевременно информировать водителя о необходимых действиях и степени их срочности. Также в DSSS дорожные датчики установлены над проезжей частью на консоли, что приводит к удорожанию и снижению надежности системы, а также к сокращению дистанции, на которой водитель может быть предупрежден об аварийно-опасной ситуации на перекрестке. Малая протяженность зон контроля дорожных датчиков, а также отсутствие мониторинга зоны возможных столкновений непосредственно на перекрестке является наиболее серьезным недостатком системы DSSS, так как при этом практически исключена возможность прогнозирования опасной ситуации.
Задачей, на решение которой направлена заявленная система, является повышение эффективности мониторинга дорожно-транспортной обстановки на аварийно-опасных участках дороги и выявления ситуаций, связанных со столкновением участников дорожного движения с учетом динамики их движения, а также своевременное предупреждение водителей ТС о возможности таких столкновений, степени их опасности и срочности мер, которые должен предпринять водитель для предотвращения столкновения.
Техническим результатом является обеспечение эффективного мониторинга дорожно-транспортной обстановки на аварийно-опасных участках дороги за счет расширения зоны контроля системы и повышения информативности данных, получаемых для выработки тревожного сигнала с целью своевременного предупреждения водителей ТС об опасности столкновения участников дорожного движения с учетом динамики их движения, о степени их опасности и о степени срочности мер, необходимых для предотвращения столкновения.
Раскрытие изобретения
Для решения поставленной задачи предложена система предупреждения столкновений участников дорожного движения на аварийно-опасном участке дороги, содержащая информационно связанные между собой:
- датчики обнаружения участников дорожного движения, приближающихся к зоне возможного столкновения,
- процессорный блок-концентратор, выполненный с возможностью формирования тревожного информационного сообщения в случае возникновения аварийно-опасной ситуации на дороге,
- по меньшей мере одно средство оповещения.
Предложенная система отличается тем, что каждый датчик обнаружения представляет собой радиолокационный измеритель, выполненный с возможностью определения дальности, азимутального угла, скорости перемещения и траекторий движения всех участников дорожного движения, зона контроля которого охватывает перекресток и участок подъездной дороги, и/или зону пешеходного перехода, причем каждый радиолокационный измеритель установлен у края проезжей части вблизи зоны повышенного риска столкновения у перекрестка и/или пешеходного перехода таким образом, что его антенна направлена в сторону приближающегося транспорта или пешехода, а процессорный блок-концентратор выполнен с возможностью анализа траекторий движения всех участников движения в зоне контроля, вычисления места и времени до возможного столкновения и формирования тревожного информационного сообщения в виде кодового сигнала, передаваемого на транспортные средства посредством односторонней связи.
В предпочтительном варианте процессорный блок-концентратор выполнен с возможностью вычисления времени въезда транспортных средств в зону возможного столкновения и формирования различных предупреждающих сигналов, содержащих различную тревожную информацию для транспортных средств, движущихся по каждой из подъездных дорог, и идентификатор этой дороги.
Радиолокационные измерители системы могут входить в состав фоторадарных датчиков, предназначенных для выявления и фотовидеофиксации нарушений правил дорожного движения.
В системе в предпочтительном варианте процессорный блок-концентратор может быть выполнен с возможностью сбора статистической информации об интенсивности и скорости движения транспортных средств в зоне контроля, а также о количестве и характере потенциально опасных ситуаций.
В системе процессорный блок-концентратор конструктивно и схемотехнически может быть объединен с одним из радиолокационных измерителей.
Техническим результатом является обеспечение эффективного мониторинга дорожно-транспортной обстановки на аварийно-опасных участках дороги за счет расширения зоны контроля системы и повышения информативности данных, получаемых для выработки тревожного сигнала с целью своевременного предупреждения водителей ТС об опасности столкновения участников дорожного движения с учетом динамики их движения, о степени их опасности и о степени срочности мер, необходимых для предотвращения столкновения.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
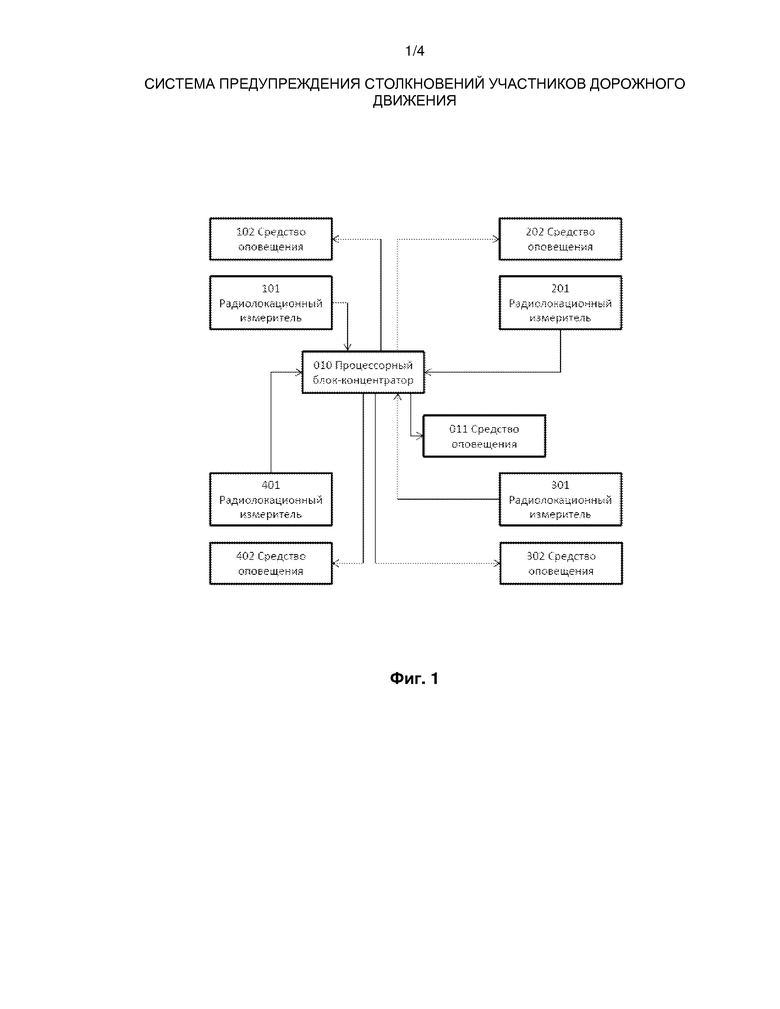
На Фиг.1 приведена блок-схема заявленной системы, расположенной на перекрестке.
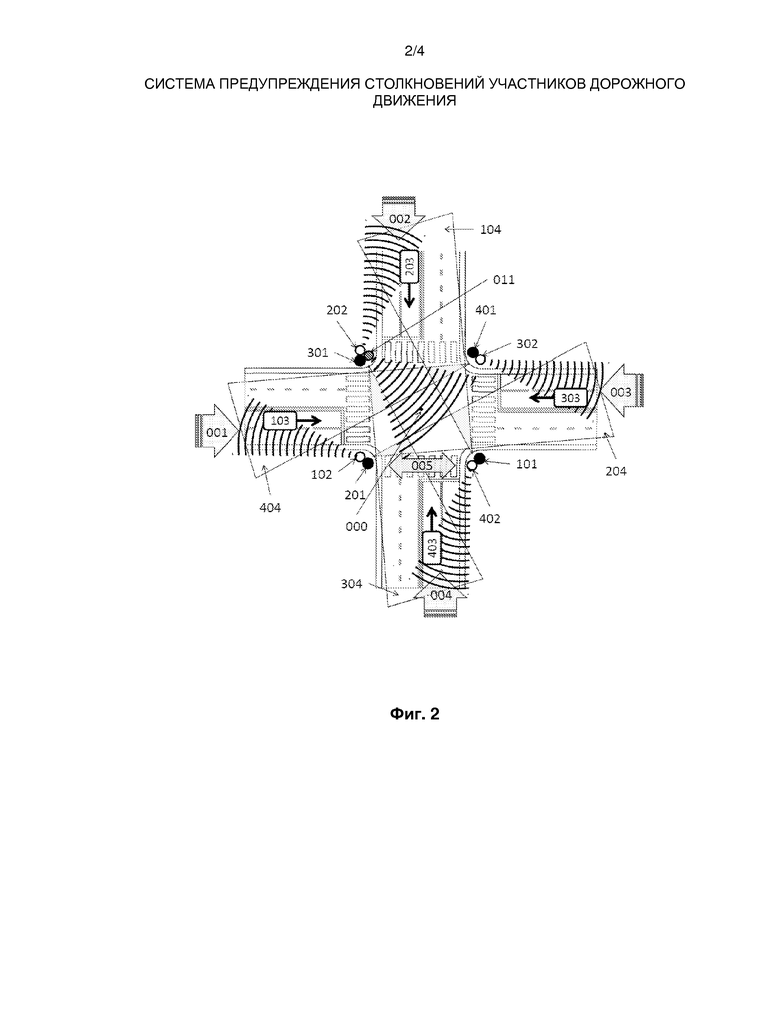
На Фиг.2 показана 2D-схема размещения элементов системы на перекрестке (приведен вид сверху).
На Фиг.3 показана 2D-схема размещения элементов системы на пешеходном переходе (приведен вид сверху).
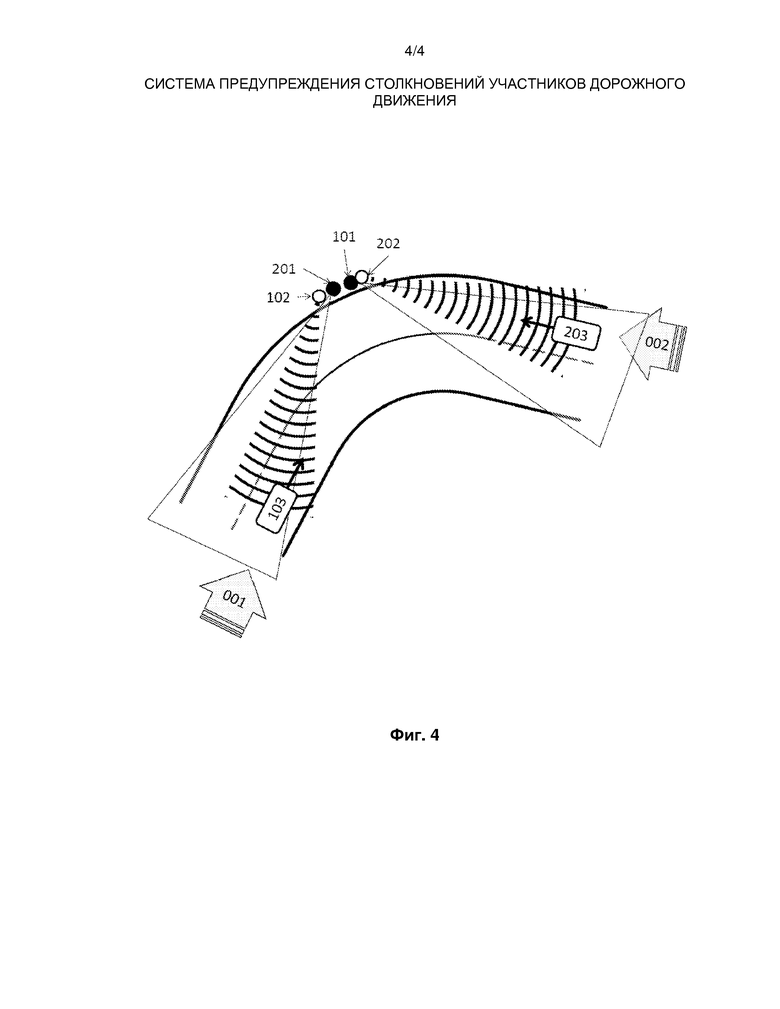
На Фиг.4 показана 2D-схема размещения элементов системы на опасном повороте (приведен вид сверху).
На Фиг.1-Фиг.4 приняты следующие обозначения:
000 перекресток
001 направление движения (подъездная дорога)
002 направление движения (подъездная дорога)
003 направление движения (подъездная дорога)
004 направление движения (подъездная дорога)
005 направление движения пешеходов
010 процессорный блок-концентратор
101 радиолокационный измеритель
201 радиолокационный измеритель
301 радиолокационный измеритель
401 радиолокационный измеритель
102 средство оповещения
202 средство оповещения
302 средство оповещения
402 средство оповещения
011 средство оповещения, направленное на область
перекрестка 000
103 ТС, движущиеся в направлении 001
203 ТС, движущиеся в направлении 002
303 ТС, движущиеся в направлении 003
403 ТС, движущиеся в направлении 004
104 зона контроля радиолокационного измерителя 101
204 зона контроля радиолокационного измерителя 201
304 зона контроля радиолокационного измерителя 301
404 зона контроля радиолокационного измерителя 401
Осуществление изобретения
Блок-схема заявленной системы, расположенной на перекрестке, показана на Фиг.1.
В простейшем случае заявленная система состоит из радиолокационного измерителя 101, процессорного блока-концентратора 010 и средства 102 оповещения.
Радиолокационный измеритель 101 установлен у края от проезжей части, как это показано на Фиг.2, на высоте нескольких метров на стационарной конструкции (мачта освещения, опора фермы и т.п.) так, чтобы зона его контроля 104 включала зону перекрестка 000 и участок подъездной дороги (с направлением 002), причем антенна радиолокационного измерителя 101 направлена в сторону приближающегося транспорта или пешехода (например, навстречу направлению 002). Остальные радиолокационные измерители устанавливаются аналогичным образом.
Радиолокационный измеритель 101 представляет собой датчик с одной излучающей и двумя приемными антеннами, снабженный доплеровским измерителем скорости и электронно-вычислительным устройством. Дальность радиолокационного измерителя 101 может составлять несколько сотен метров.
Процессорный блок-концентратор 010 расположен рядом с одним из радиолокационных измерителей (101, 201, 301 или 401) и представляет собой электронно-вычислительное устройство, связанное со всеми радиолокационными измерителями 101, 201, 301, 401, устанавливаемыми на участке дороги, где необходимо контролировать параметры движения участников движения (ТС и/или пешеходов) для предотвращения их столкновения.
Средство 102 оповещения представляет собой устройство передачи данных от процессорного блока-концентратора 010 на ТС. В качестве такого устройства может применяться извещатель, использующий для передачи данных инфракрасный канал и обеспечивающий информирование участников движения о возможной опасности. Извещатель может представлять собой блок инфракрасных светодиодов, оснащенных линзами для формирования диаграммы направленности, и обеспечивающий передачу необходимой информации посредством кодовых импульсных сигналов.
Возможно также применение извещателя, использующего радиоканал для передачи данных, причем такой радиопередатчик может работать в том диапазоне частот (например, FM-диапазона), который предназначен для передачи служебной информации. Принцип работы заявленной системы описан на примере ее использования на нерегулируемом перекрестке 000, изображенном на Фиг. 2.
ТС 103, 203, 303, 403, приближающиеся каждый по своему направлению движения 001, 002, 003, 004 к перекрестку 000, на подъездных участках попадают в зону контроля одного из радиолокационных измерителей 101, 201, 301, 401. Каждый из радиолокационных измерителей 101, 201, 301, 401 определяет с частотой не менее 40 раз в секунду дальность, азимутальный угол, скорость перемещения каждого ТС 103, 203, 303, 403 в зоне своего контроля 104, 204, 304, 404. Посредством электронно-вычислительного устройства, входящего в состав каждого из радиолокационных измерителей 101, 201, 301, 401, определяются траектории движения участников дорожного движения, перемещающихся в зоне контроля соответствующего радиолокационного измерителя 101, 201, 301, 401. Каждый из радиолокационных измерителей 101, 201, 301, 401 передает данные о скорости перемещения, координатах и траектории движения каждого ТС, перемещающегося в зоне контроля соответствующего радиолокационного измерителя на процессорный блок-концентратор 010.
В процессорном блоке-концентраторе 010 происходит анализ данных о траекториях, координатах и скоростях движения ТС 103, 203, 303, 403, поступивших со всех направлений 001, 002, 003 и 004, а также происходит вычисление координат места возможного столкновения и времени, оставшемся до возможного столкновения.
Также в зону контроля 104, 204, 304, 404 каждого из радиолокационных измерителей 101, 201, 301, 401, расположенных на перекрестке, попадают и пешеходы, движущиеся по пешеходным переходам в направлениях 005.
При возникновении предаварийной ситуации процессорный блок-концентратор 010 формирует тревожные информационные сообщения, которые могут быть переданы водителям ТС 103, 203, 303, 403 с помощью средств оповещения 102, 202, 302, 402. Средства оповещения 102, 202, 302, 402 могут иметь индивидуальную зону охвата (см. Фиг. 2). Так, водители ТС 103, движущиеся по направлению 001, получат тревожное сообщение со средства оповещения 102, а водители ТС 203 соответственно получат тревожное сообщение со средства оповещения 202 и т.д.
При въезде в зону перекрестка при возникновении предаварийной ситуации водители ТС получают тревожное информационное сообщение в виде кодового сигнала со средства 011 оповещения, которое может быть как единичным устройством, расположенным у края от проезжей части с диаграммой направленности, направленной внутрь перекрестка, так и группой средств 011 оповещения, каждое из которых может быть размещено на углу перекрестка 000 так, что диаграмма направленности каждого из них также направлена внутрь перекрестка 000 (см. Фиг.2).
Таким образом, заявленная система может обеспечить необходимой информацией и тех водителей ТС, которые, выехав на середину перекрестка (например, с направления 001), остановились для совершения левого поворота. Важным предупреждением в таком случае является информация о параметрах движения ТС, приближающихся со встречного направления (003), поскольку именно их проезда ожидает водитель ТС 103, планирующий левый поворот, и неожиданное появление этих ТС зачастую является причиной столкновения.
Также следует отметить, что заявленная система способна предупреждать о возможности возникновения ДТП и при других маневрах участников дорожного движения, так как анализ возникновения аварийно-опасных ситуаций производится за счет непрерывной обработки данных о траекториях и скоростях всех участников дорожного движения. Возможность одновременного отслеживания траекторий всех ТС, находящихся в зоне контроля радиолокационных измерителей, установленных с разных сторон перекрестка, позволяет, проанализировав возможное развитие ситуации, заблаговременно спрогнозировать угрозу возникновения столкновения и предупредить о ней водителей ТС.
На Фиг.3 показана 2D-схема размещения элементов системы на пешеходном переходе.
На пешеходном переходе вероятность ДТП с участием пешеходов гораздо выше для тех водителей ТС, которые двигаются по второй и третьей полосам движения. Пешеход, которого пропускает водитель на первой полосе движения, может быть не виден водителю, двигающемуся по второй полосе. Размещение заявленной системы на пешеходных переходах позволяет значительно снизить риск таких ДТП.
При этом радиолокационные измерители 101 и 201 устанавливаются с двух сторон вблизи пешеходного перехода так, чтобы их антенны были направлены навстречу движению пешеходов 005, а диаграммы направленности средств оповещения 102 и 202 направлены навстречу приближающимся ТС 103 и 203 соответственно. Как и в предыдущем случае, радиолокационные измерители 101 и 201 измеряют координаты и скорость каждого пешехода, перемещающегося в зоне контроля радиолокационного измерителя, а процессорный блок-концентратор 010 формирует тревожное сообщение на основании этих данных.
На Фиг.4 показано применение заявленной системы на крутом повороте. Как было указано выше, антенны радиолокационных измерителей 101 и 201 направлены в сторону приближающегося транспорта (в данном случае в сторону встречного направления). Радиолокационные измерители 101, 201, как и в предыдущих вариантах, измеряют дальность, азимутальный угол, скорость перемещения каждого ТС 103, 203 в зоне своего контроля 104, 204. Средства оповещения 102 и 202 при возникновении аварийно-опасной ситуации передают тревожные информационные сообщения на ТС.
Таким образом, технический результат достигается путем формирования тревожного информационного сообщения, получаемого на основании расчетных данных о месте возможного столкновения и времени, оставшемся до столкновения с другими участниками движения, и его передачи на ТС. Расчетные данные получают за счет совместной обработки данных, поступающих от всех радиолокационных измерителей, размещенных вблизи зоны повышенного риска возникновения столкновений.
В некоторых случаях процессорный блок-концентратор может быть выполнен с возможностью вычисления времени въезда в зону возможного столкновения и формирования различных предупреждающих сигналов, содержащих различную тревожную информацию для каждой из подъездных дорог и идентификатор этой дороги.
Процессорный блок-концентратор может быть также выполнен с возможностью сбора статистической информации об интенсивности и скорости движения транспортных средств в зоне контроля, а также о количестве и характере потенциально опасных ситуаций.
Кроме того, процессорный блок-концентратор конструктивно и схемотехнически может быть объединен с одним из радиолокационных измерителей.
На ТС может быть размещено приемное устройство, принимающее сигналы от средства оповещения. Приемное устройство может быть размещено внутри салона ТС или любым другим способом и может быть выполнено в виде электронного блока, обеспечивающего прием тревожного сигнала по оптическому, инфракрасному, радиоволновому или иному каналу, и иметь в своем составе оптический, звуковой, вибрационный или иной извещатель для предупреждения водителя об аварийно-опасной ситуации. Приемное устройство может представлять собой, например, радиоприемник со служебным каналом, планшетный компьютер с установленным специальным приложением либо быть отдельным специализированным устройством.
Заявленной системой предупреждения могут быть также оснащены радиолокационные датчики, установленные на линейных участках дорог и предназначенные для контроля скоростного режима и сбора статистической дорожной информации. Известно, что эти приборы, помимо контроля скоростного режима и интенсивности движения, способны выявлять ТС, двигающиеся по встречной полосе. Средство оповещения, установленное на таком радиолокационном датчике и направленное в сторону, противоположную направлению излучающей антенны радиолокационного датчика, сможет предупредить водителя о наличии нарушителя, двигающегося по встречной полосе, что особенно уместно вблизи опасных поворотов дорог и на участках дорог с ограниченной видимостью.
Кроме того, система, обладающая полным набором сведений обо всех приближающихся и проезжающих перекресток ТС, способна не только прогнозировать возникновение возможных столкновений участников дорожного движения, но и моментально обнаруживать уже произошедшие столкновения, а следовательно, обеспечивать мгновенное оповещение соответствующих дорожных служб по цифровым каналам связи.
Система, содержащая радиолокационный измеритель, видеокамеру и систему распознавания государственных регистрационных знаков, представляет собой законченную конструкцию фоторадарного датчика, применяющегося в настоящее время для выявления нарушений ПДД [7]. Так, незначительная модернизация дает возможность использовать аппаратуру, предназначенную для выявления и привлечения к ответственности нарушителей, также и для предотвращения столкновений и снижения уровня аварийности.
В итоге недостатки системы DSSS, выбранной в качестве прототипа, устраняются посредством заявляемой системы, в которой обнаружение факта опасности, определение степени опасности, вычисление местоположения источника опасности, времени до возможного столкновения и степени срочности мер, которые должен предпринять водитель для предотвращения столкновения, производятся с помощью данных о текущей скорости движения, дальности и азимутального угла положения участников дорожного движения, полученных от радиолокационных измерителей, установленных вблизи зоны повышенного риска столкновения и имеющих протяженную зону контроля, что позволяет с высокой надежностью прогнозировать его траекторию в зоне повышенного риска столкновения, а следовательно, более достоверно формировать сигнал предупреждения об опасности.
Литература
1.http://www.jcnews.ru/news/proezd_perekrestka_na_jeltyiy_svet_obeschayut_sdelat_bolee_bezopasnyim/17377.
2. http://www.innovanews.ru/info/news/transport/9774/.
3. Патент RU 2441283, опубл. 27.01.2011.
4. Патент US 5907293 A, опубл. 25.05.1999.
5. http://www.utms.or.jp/english/system/dsss.html.
6. Патент EP 2256711 A1, опубл. 01.12.2010.
7. Патент № 2539676, опубл. 20.01.2015.

Изобретение относится к системам обеспечения безопасности дорожного движения, служащим для предотвращения столкновений участников дорожного движения, в частности к устройствам помощи водителям транспортных средств, и может быть использовано для обеспечения безопасного проезда пересечений дорог. Предложена система предупреждения столкновений участников дорожного движения, содержащая информационно-связанные между собой: датчики обнаружения участников дорожного движения, приближающихся к зоне возможного столкновения, процессорный блок-концентратор, выполненный с возможностью формирования тревожного информационного сообщения в случае возникновения аварийно-опасной ситуации на дороге, по меньшей мере одно средство оповещения. Предложенная система отличается тем, что каждый датчик обнаружения представляет собой радиолокационный измеритель, выполненный с возможностью определения дальности, азимутального угла, скорости перемещения и траекторий движения всех перекресток и участок подъездной дороги, и/или зону пешеходного перехода, причем каждый радиолокационный измеритель установлен у края проезжей части вблизи зоны повышенного риска столкновения у перекрестка и/или пешеходного перехода таким образом, что его антенна направлена в сторону приближающегося транспорта или пешехода, а процессорный блок-концентратор выполнен с возможностью анализа траекторий движения всех участников движения в зоне контроля, вычисления места и времени до возможного столкновения и формирования тревожного информационного сообщения в виде кодового сигнала, передаваемого на транспортные средства посредством односторонней связи. Технический результат достигается за счет расширения зоны контроля системы и повышения информативности данных, получаемых для выработки тревожного сигнала, с целью своевременного предупреждения водителей транспортных средств об опасности столкновения участников дорожного движения с учетом динамики их движения, о степени их опасности и о степени срочности мер, необходимых для предотвращения столкновения. Обеспечивается эффективный мониторинг дорожно-транспортной обстановки на аварийно-опасных участках дороги. 4 з.п. ф-лы, 4 ил. 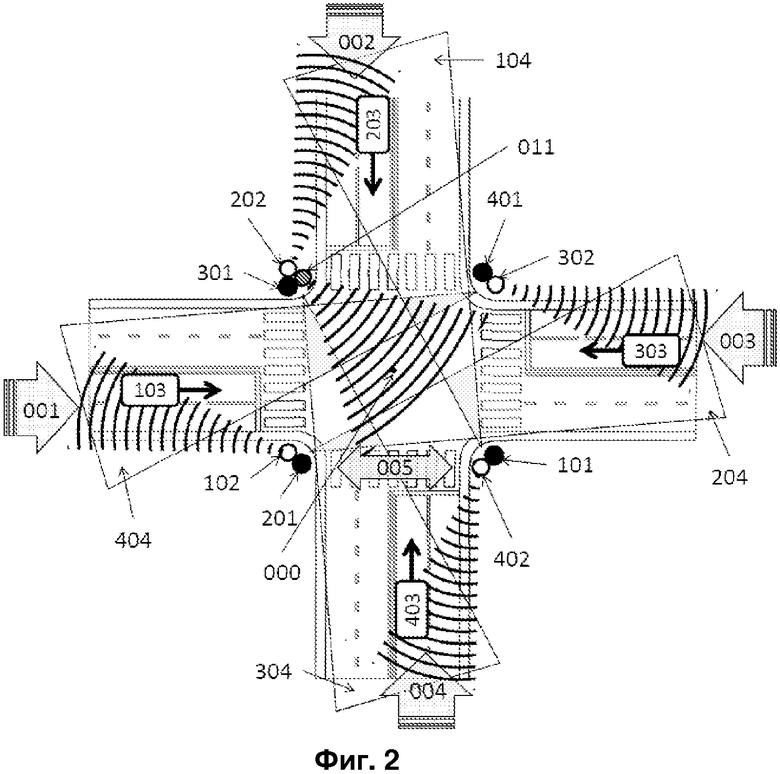
1. Система предупреждения столкновений участников дорожного движения, содержащая информационно-связанные между собой: датчики обнаружения участников дорожного движения, приближающихся к зоне возможного столкновения, процессорный блок-концентратор, выполненный с возможностью формирования тревожного информационного сообщения при возникновении аварийно-опасной ситуации на дороге, и по меньшей мере одно средство оповещения,
отличающаяся тем, что каждый датчик обнаружения представляет собой радиолокационный измеритель, выполненный с возможностью определения дальности, азимутального угла, скорости перемещения и траекторий движения всех участников дорожного движения, зона контроля которого охватывает перекресток и участок подъездной дороги, и/или зону пешеходного перехода, причем каждый радиолокационный измеритель установлен у края проезжей части вблизи зоны повышенного риска столкновения у перекрестка и/или пешеходного перехода таким образом, что его антенна направлена в сторону приближающегося транспорта или пешехода, а процессорный блок-концентратор выполнен с возможностью анализа траекторий движения всех участников движения в зоне контроля, вычисления места и времени до возможного столкновения и формирования тревожного информационного сообщения в виде кодового сигнала, передаваемого на транспортные средства посредством односторонней связи.
2. Система по п.1, отличающаяся тем, что процессорный блок-концентратор выполнен с возможностью вычисления времени въезда транспортных средств в зону возможного столкновения и формирования различных предупреждающих сигналов, содержащих различную тревожную информацию для транспортных средств, движущихся по каждой из подъездных дорог, и идентификатор этой дороги.
3.Система по п.1, отличающаяся тем, что радиолокационные измерители входят в состав фоторадарных датчиков, предназначенных для выявления и фотовидеофиксации нарушений правил дорожного движения.
4. Система по п.1, отличающаяся тем, что процессорный блок-концентратор выполнен с возможностью сбора статистической информации об интенсивности и скорости движения транспортных средств в зоне контроля, а также о количестве и характере потенциально опасных ситуаций.
5. Система по п.1, отличающаяся тем, что процессорный блок-концентратор конструктивно и схемотехнически объединен с одним из радиолокационных измерителей.
| US 5907293 A1, 25.05.1999 | |||
| РАДАР БЕЗОПАСНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 1992 |
|
RU2092869C1 |

