Область техники, к которой относится изобретение
Изобретение относится к системам управления дорожными транспортными средствами, использующим отражение или переизлучение электромагнитных волн, например системы лидаров, для предупреждения или предотвращения столкновений наземных транспортных средств.
Уровень техники
Из уровня техники известно множество технических решений, предназначенных для оповещения участников дорожного движения о приближении встречного транспортного средства для предотвращения столкновения, в частности при совершении маневра обгона по встречной полосе. Наиболее распространенными и актуальными на сегодняшний день техническими решениями в данной области являются интеллектуальные системы (устройства), устанавливаемые на транспортном средстве и\или использующие беспроводную сеть. К примеру, такие технические решения описаны в патентах на изобретения RU2715601 от 02.03.2020 г., RU2756878 от 06.10.2021 г., заявке Китая CN110053608A от 26.07.2019 г., патенте США US11615700B2 от 28.03.2023 г., заявке Китая CN109910875A от 21.06.2019 г.
К недостаткам описанных систем относится зависимость ее работоспособности от состояния мобильных устройств пользователей (водителей) или от функционирования беспроводных сетей.
Из уровня техники известна система оповещения участников дорожного движения об опасности, представленная в патенте США US10235882B1 от 19.03.2019 г. Указанная система включает по меньшей мере одно устройство (RSE), содержащее корпус, выполненный с возможностью крепления на элемент дорожной инфраструктуры, датчики движения (101), такие как ультразвуковые датчики и\или лидары, модуль фиксации (101) в виде видео- или фотокамер, модуль передачи данных (104) с внешним программным обеспечением (130), процессор (105), выполненный с возможностью приема и обработки данных, поступающих от входящих в конструкцию устройства элементов, а также других аналогичных устройств системы. Устройство также включает разъем (108) для связи с модулем оповещения об опасности (например, в виде светофора).
Из уровня техники известна система оповещения участников дорожного движения об опасности, описанная в международной заявке WO2022144744A1 от 07.07.2022 г. Система оповещения включает по меньшей мере два устройства, каждое из которых содержит корпус, выполненный с возможностью крепления на элемент дорожной инфраструктуры, по меньшей мере один датчик движения (ультразвуковой или лидар), процессор, выполненный с возможностью определения местоположения уязвимого участника дорожного движения и определения направления движения уязвимого участника дорожного движения, при этом процессор каждого устройства сконфигурирован для отправки первого независимого сообщения по меньшей мере одному устройству; при этом процессор сконфигурирован для определения того, какое устройство получает независимое сообщение, на основе местоположения и направления движения уязвимого участника дорожного движения, поступающих от входящих в состав системы устройств, модуль оповещения, выполненный с возможностью вывода визуального отображения и\или звукового сигнала, радиоприемник и радиопередатчик, модуль электропитания.
Из уровня техники также известно техническое решение, описанное в заявке Китая CN111223299A от 02.06.2020 г. Система управления обгоном на основе интеллектуального фонарного столба включает процессор, выполненный с возможностью определения положения транспортного средства, прогнозирования его маршрута, скорости, индекса обгона на основе скорости впереди идущего транспортного средства, за которым следует транспортное средство, и средней скорости движения впереди идущего транспортного средства, расстояние обгона впереди идущего транспортного средства по текущей полосе; расчета коэффициент безопасности обгона исходя из скорости движения транспортного средства, находящегося позади на полосе обгона, и оставшегося расстояния обгона впереди идущего транспортного средства на текущей полосе; принятия решения о запрете или разрешении выполнения безопасного маневра обгона.
Общим недостатком описанных систем является зависимость от централизованных беспроводных коммуникационных сетей, по которым через модуль передачи данных отправляется информация о дорожной ситуации и после обработки внешним программным обеспечением направляется команда для предупреждения участников дорожного движения о возможной опасности столкновения. Централизованные беспроводные коммуникационные сети могут иметь нестабильную работу, вызванную, например, подавлением сигнала специальными техническими средствами при проведении различных общевойсковых операций или нестабильной работой коммутационного оборудования операторов сотовой связи. Помимо этого, дополнительно можно отметить низкую надежность работы и неправильное информирование участников дорожного движения в случае сбоя основного процессора, что негативно сказывается на безопасности дорожного движения.
Наиболее близким аналогом рассматриваемого технического решения можно считать техническое решение, описанное в патенте США US11370440B2 от 28.06.2022 г. Система оповещения участников дорожного движения об идеализированном маневре обгона состоит из по меньшей мере двух устройств (201, 202, 203), расположенных по обе стороны движения транспортных средств, каждое из которых содержит корпус, выполненный с возможностью крепления на элемент дорожной инфраструктуры, включающий датчик движения (ультразвуковой или лидар), модуль фиксации окружающей обстановки, процессор (блок оценки), выполненный с возможностью определения будущего окружения транспортного средства, модуль передачи данных, модуль электропитания, устройства (110), включающего центральный процессор (100), выполненный с возможностью приема и обработки данных о скорости и положении ТС, поступающих от входящих в состав системы устройств (201, 202, 203), расчета скорости транспортных средств и построении траектории безопасного обгона транспортного средства, модуль оповещения, выполненный с возможностью вывода визуального отображения, модуль, выполненный с возможностью удаленного обмена данными с внешним ПО, модуль электропитания.
Описанный предшествующий уровень техники показывает отсутствие прямых аналогов заявленного устройства и необходимость разработки комплекса оповещения участников дорожного движения для предотвращения их столкновений с расширенной функциональностью, повышенной надежностью и независимостью от централизованных коммуникационных сетей.
Раскрытие сущности изобретения
Существующие подобные системы оповещения участников дорожного движения имеют ряд недостатков. Основа этих недостатков – это привязка к централизованным беспроводным коммуникационным сетям или устройствам пользователей, которые по различным причинам имеют нестабильную работу. Также существенным недостатком является низкая надежность и недостоверные оповещения в случае сбоя основного процессора, что негативно сказывается на безопасности дорожного движения.
Технический результат, который достигается заявленным устройством заключается в обеспечении локального или автономного оповещения водителей для предотвращения столкновений встречных транспортных средств непосредственно в месте расположения заявленного комплекса за счет применения системы радиообмена данными с внутренним зашифрованным радиоканалом для обмена информацией между элементами заявленного комплекса и системой информирования водителей со стационарным информационным экраном. Заявленный комплекс не использует централизованные беспроводные коммуникационные сети, блоки устройства взаимодействуют друг с другом по внутреннему зашифрованному радиоканалу без участия удаленного сервера, а предупреждение демонстрируется на экране в близи контролируемой дорожной обстановки. Также заявленный комплекс обладает повышенной надежностью за счет наличия дополнительного процессора контроля, который в случае сбоя основного процессора обработки данных дублирует все его ответственные функции.
Технический результат достигается с помощью комплекса оповещения участников дорожного движения для предотвращения их столкновений, который состоит из системы информирования с экраном, системы распознавания и фиксации дорожной обстановки на основе датчика расстояния и видеодатчика, системы радиообмена данными, GSM-модуля, удаленного сервера, системы электропитания, процессора обработки данных, выполненного с возможностью приема и обработки данных о скорости и положении транспортных средств, расчета скорости транспортных средств и анализа траектории безопасного обгона по крайней мере одного из транспортных средств, характеризующегося тем, что процессор обработки данных выполнен с возможностью инициализации команд для системы информирования по внутреннему защищенному радиоканалу системой радиообмена данными и содержит процессор контроля, выполненный с возможностью контроля функционирования процессора обработки данных и дублирования его функций; система информирования имеет элемент звукового оповещения; процессор обработки данных выполнен с возможностью считывания данных системы радиообмена, формирования предупреждающих изображений для вывода на экран и звукового оповещения для системы информирования, обработки, передачи и получения данных и команд на GSM-модуль для обмена с удаленным сервером, контроля параметров системы электропитания; система электропитания реализована на базе аккумуляторных батарей, фотоэлектрических преобразователей, ветрогенераторов и дизельной подстанции.
Применение заявленного комплекса оповещения участников дорожного движения для предотвращения их столкновений расширяет функциональность элементов дорожной инфраструктуры, повышает безопасность дорожного движения и создает потенциал для дальнейшего использования данных о дорожной ситуации.
Краткое описание чертежей
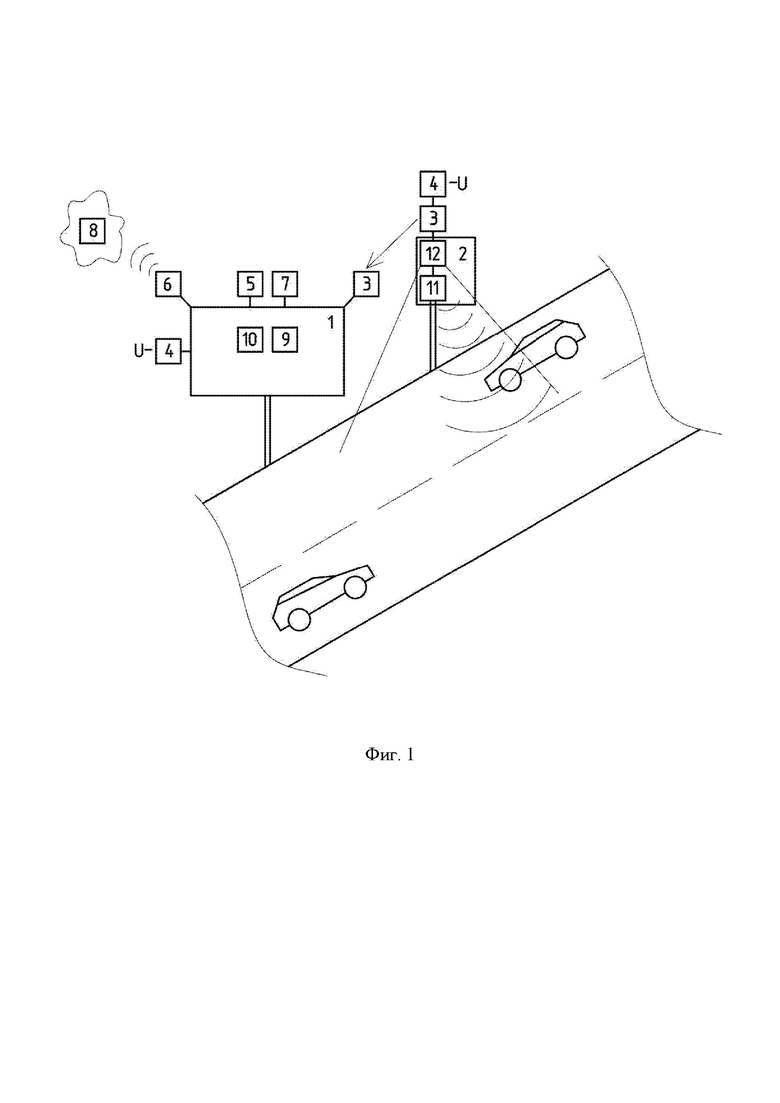
На Фиг. 1 проиллюстрирован пример исполнения заявленного комплекса оповещения участников дорожного движения для предотвращения их столкновений.
На фиг. 1 обозначены: 1 – система информирования водителей; 2 – система распознавания и фиксации дорожной обстановки; 3 – система радиообмена данными; 4 – система электропитания; 5 – процессор обработки данных; 6 – GSM-модуль; 7 – процессор контроля; 8 – удаленный сервер; 9 – экран; 10 – элемент звукового оповещения; 11 – датчик расстояния; 12 – видеодатчик.
Осуществление изобретения
Комплекс оповещения участников дорожного движения для предотвращения их столкновений состоит из системы 1 информирования водителей, системы 2 распознавания и фиксации дорожной обстановки, системы 3 радиообмена данными, системы 4 электропитания, процессора 5 обработки данных, GSM-модуля 6, процессора 7 контроля, удаленного сервера 8.
Система 1 информирования водителей включает в себя по крайней мере один экран 9 для воспроизведения статических изображений с какой-либо информацией или потокового видео и элемент 10 звукового оповещения для воспроизведения звуковых сигналов или различной аудиоинформации. При большой протяженности контролируемого участка дороги или ограниченной видимости системы 1 информирования водителей могут использоваться несколько заявленных комплексов, которые через системы 3 радиообмена данными и GSM-модули 6 каждого из комплексов обеспечивают согласованную работу процессоров 5 обработки данных и 7 контроля всех используемых комплексов одновременно.
Система 2 распознавания и фиксации дорожной обстановки содержит датчик 11 расстояния и видеодатчик 12. Датчик 11 расстояния выполнен в виде лидара или иного электронного компонента, способного фиксировать присутствие предмета и отслеживать перемещение этого предмета во времени. Видеодатчик 12 представляет собой чувствительную матрицу для захвата и формирования видеоряда окружающей обстановки в поле его зрения.
Система 3 радиообмена данными состоит из радиоприемника и радиопередатчика, которые синхронно работают по алгоритму криптографического шифрования, например, асимметрического алгоритма крипто шифрования – RSA (аббревиатура от Rivest, Shamir и Adelman, фамилий создателей алгоритма) и/или с помощью симметричного шифрования AES (Advanced Encryption Standard). Радиоприемник и радиопередатчик системы 3 позволяют принимать и передавать информацию посредством радиоволн.
Система 4 электропитания подает напряжение на энергозависимые компоненты заявленного комплекса. Она может быть реализована на базе аккумуляторных батарей, фотоэлектрических преобразователей, ветрогенераторов или дизельной подстанции.
Процессор 5 обработки данных представляет собой микроконтроллер или одноплатный компьютер (например, Raspberry Pi или Arduino) для обработки данных и управления устройством с памятью (RAM и/или флеш-память) для хранения данных и программного обеспечения. Он выполняет следующие функции:
– Расчет скорости движения встречного объекта
Процессор 5 получает данные от датчика 11 расстояния, который измеряет расстояние до приближающегося транспортного средства. На основе временных меток и изменений расстояния процессор 5 вычисляет скорость приближающегося объекта. Используя вычисленную скорость, процессор 5 прогнозирует время прибытия объекта к следующему датчику 11 расстояния.
– Расчет скорости движения удаляющегося объекта
Процессор 5 получает данные от датчика 11 расстояния, который измеряет расстояние до отдаляющегося транспортного средства. На основе временных меток и изменений расстояния процессор 5 вычисляет скорость отдаляющегося объекта. Используя вычисленную скорость, процессор 5 прогнозирует время удаления объекта от текущего датчика 11 расстояния.
– Сопоставление показателей с по крайней мере двух датчиков 11 расстояний при их наличии для минимизации ошибок и сравнения их показателей работоспособности
Процессор 5 сравнивает данные, полученные от по крайней мере двух датчиков 11 расстояния, для выявления возможных ошибок и несоответствий. Затем процессор 5 анализирует разницу в показаниях и определяет возможные ошибки в работе датчиков 11. Например, если возможные показания датчиков 11 превышают физически допустимое значение, то процессор 5 инициализирует команду для проверки их работоспособности.
– Инициализация команды на радиопередатчик для отправки сигнала на радиоприемник системы 3
Процессор 5 формирует команды для радиопередатчика системы 3 на основе анализа данных и текущей дорожной обстановки. Например, команда может содержать информацию о плотности дорожного трафика, скорости движения и прогнозируемых событиях. Процессор 5 инициализирует отправку сформированного сигнала на радиоприемник через радиопередатчик системы 3.
– Считывание данных с радиоприемника системы 3 о состоянии других элементов комплекса
Процессор 5 считывает данные, полученные с радиоприемника системы 3, с информацией от системы 2 распознавания и фиксации дорожной обстановки. Затем процессор анализирует полученные данные для координации работы с другими аналогичными заявленному комплексами. Данные могут включать информацию о текущей дорожной обстановке, инцидентах и прогнозах дорожного трафика.
– Формирование изображения для вывода на экран 9
Процессор 5 обрабатывает данные для формирования визуального представления дорожной обстановки. Например, графики плотности дорожного трафика, географические карты местности с указанием инцидентов и погодных условий. Процессор 5 генерирует изображения для вывода на экран 9, используя библиотеки для графической визуализации данных, например, matplotlib или OpenGL.
– Обработка и передача данных и команд на GSM-модуль 6 для обмена с удаленным сервером 8
Процессор 5 формирует пакеты данных для передачи на удаленный сервер 8 через GSM-модуль 6. Например, пакет данных может включать временные метки, местоположение, данные о плотности дорожного трафика и инцидентах. Процессор 5 инициализирует передачу сформированных пакетов данных на удаленный сервер 8 через GSM-модуль 6.
– Получение и обработка данных и команд с GSM-модуля 6, полученных с удаленного сервера 8
Процессор 5 получает данные и команды от удаленного сервера 8 через GSM-модуль 6 и обрабатывает полученные команды и данные для выполнения соответствующих действий. Например, команды могут включать инструкции по изменению параметров работы устройства или обновление программного обеспечения.
– Формирование команды для звукового оповещения
Процессор 5 анализирует данные для определения необходимости звукового оповещения участников дорожного движения. Например, звуковое оповещение может быть инициализировано при обнаружении аварии или плотного дорожного трафика. Процессор 5 формирует команду для звукового оповещения. Команда может содержать тип звукового сигнала и продолжительность.
– Контроль параметров системы 4 электропитания элементов заявленного устройства
Процессор 5 получает данные о состоянии электроснабжения комплекса. Данные могут включать напряжение, ток и уровень заряда аккумуляторов. Процессор 5 анализирует эти данные для выявления возможных проблем с электроснабжением. Например, если напряжение падает ниже допустимого уровня, процессор инициализирует предупреждение или переключение на резервное питание. Также процессор прогнозирует состояние электроснабжения на основе текущих и исторических данных, используя машинные методы анализа временных рядов для прогнозирования времени работы аккумуляторов.
GSM-модуль 6 служит для передачи данных на удаленный сервер 8 через сотовую сеть.
Процессор 7 контроля представляет собой микроконтроллер или одноплатный компьютер (например, Raspberry Pi или Arduino) для обработки данных и управления устройством с памятью (RAM и/или флеш-память) для хранения данных и программного обеспечения. Он проводит проверку работы заявленного комплекса на соответствие заданным алгоритмам, а именно:
– Проводит обработку информации с процессора 5 обработки данных
Процессор 7 контроля получает данные от процессора 5 обработки данных. Например, данные могут включать информацию о плотности дорожного трафика, скорости движения объектов, состоянии дорожного покрытия и других параметрах. Процессор 7 контроля выполняет предварительную обработку данных для их дальнейшего анализа.
– Сравнивает показатели с алгоритмом работы
Процессор 7 контроля сравнивает полученные данные с эталонными значениями и алгоритмами работы. Также процессор 7 контроля анализирует отклонения для выявления возможных нарушений в работе заявленного комплекса.
– Направляет данные о показаниях стабильности работы комплекса на GSM-модуль 6
Процессор 7 контроля формирует отчеты о стабильности работы комплекса на основе анализа данных. Например, отчет может включать информацию о текущем состоянии системы, выявленных отклонениях и принятых мерах. Затем процессор 7 направляет сформированные отчеты на GSM-модуль 6 для их передачи на удаленный сервер 8, используя протоколы передачи данных, таких как MQTT или HTTP, для отправки отчетов.
– При нарушении работы процессора 5 обработки данных, дублирует выполнение его функций
Процессор 7 контроля постоянно мониторит состояние процессора 5 для выявления возможных сбоев. В случае выявления сбоев в работе процессора 5, процессор 7 контроля берет на себя выполнение его задачи.
– Диагностика и самопроверка
Процессор 7 контроля выполняет регулярную самопроверку для выявления собственных сбоев и неисправностей. Например, осуществляет проверку целостности памяти, тестирование основных функций.
– Обновление программного обеспечения
Процессор 7 контроля получает обновления программного обеспечения от удаленного сервера 8, используя GSM-модуль 6 для загрузки необходимых обновлений. Затем процессор 7 устанавливает полученные обновления для обеспечения актуальности и безопасности работы заявленного комплекса.
– Управление энергопотреблением
Процессор 7 контроля мониторит энергопотребление комплекса для оптимизации работы. Например, производит сбор данных о потребляемой мощности, напряжении и токе и принимает меры для оптимизации энергопотребления, такие как отключение от электропитания неиспользуемых модулей.
В совокупности перечисленные функции процессора 7 контроля обеспечивают высокую надежность и эффективность работы заявленного комплекса.
Удаленный сервер 8 представляет собой серверное оборудование (например, сервер на базе x86 или ARM) для обработки и хранения данных, поступающих через GSM-модуль 6. Удаленный сервер 8 содержит серверное программное обеспечение для управления данными, анализа и визуализации информации, а также реализует функцию резервного копирования для обеспечения сохранности данных.
Для предотвращения столкновений транспортных средств и других участников дорожного движения между собой при обгоне элементы заявленного комплекса размещаются на конструкциях дорожной инфраструктуры, например, на фонарном столбе или на специальной ферме, напоминающей рекламный щит, которые устанавливаются на обочинах дорог или возле пешеходных переходов (см. Фиг. 1). При подаче электропитания от источника электропитания энергозависимые элементы заявленной системы включаются, и она переходит в режим ожидания. При этом датчик 11 расстояния постоянно сканирует область своего действия. В случае обнаружения движущихся объектов в области своего действия, датчик 11 генерирует данные о скорости и направлении движения этих объектов и передает эту информацию при помощи радиопередатчика системы 3, а процессор 5 получает эту информацию при помощи радиоприемника системы 3. Полученные данные процессор 5 анализирует по специальному машинному алгоритму и в результате определяет вероятность столкновения двигающихся автомобилей в области действия датчика 11. В случае высокой вероятности столкновения процессор 5 посылает команду с предупреждением для информирования участников дорожного движения об опасности, путем воспроизведения на экране 9 информации о скорости движения и проигрывания звукового сигнала элементом 10 звукового оповещения. Такое аудиовизуальное предупреждение заставляет участников дорожного движения своевременно предпринять действия по недопущению столкновения. При этом процессор 5 дополнительно получает через радиоприемник от радиопередатчика системы 3 видеоряд окружающей обстановки в поле действия видеодатчика 12, которое совпадает с областью действия датчика 11 расстояния. После покидания автомобилями области действия датчика 11 или при определении процессором 5 вероятности столкновения как низкой, заявленный комплекс снова переходит в режим ожидания с описанным выше алгоритмом работы. GSM-модуль 6 позволяет передать сохраненный видеоряд и информацию о состоянии датчика 11 на удаленный сервер 8 для ознакомления заинтересованными лицами или получать команды для удаленной диагностики и обслуживания элементов заявленного комплекса.
Примеры возможных сценариев поведения транспортных средств и действий локального комплекса оповещения водителей
Сценарий «Нормальное движение без угрозы столкновения»: транспортные средства движутся по своим полосам, соблюдая правила дорожного движения. Между ними сохраняется безопасное расстояние.
Действия комплекса:
– датчик 11 расстояния и видеодатчик 12 фиксируют движение транспортных средств и передают данные на процессор 5 обработки данных;
– процессор 5 анализирует данные и определяет, что вероятность столкновения низкая;
– комплекс остается в режиме ожидания, не активируя оповещение.
Сценарий «Опасное сближение транспортных средств»: два транспортных средства движутся навстречу друг другу по одной полосе, создавая угрозу столкновения.
Действия комплекса:
– датчик 11 расстояния фиксирует опасное сближение транспортных средств и передает данные на процессор 5 обработки данных;
– процессор 5 анализирует данные и определяет высокую вероятность столкновения;
– процессор 5 передает команду на экран 9 и элемент 10 звукового оповещения для активации визуального и звукового предупреждения участников дорожного движения;
– участники дорожного движения получают предупреждение и предпринимают действия для предотвращения столкновения (например, снижают скорость или возвращаются на свою полосу).
Сценарий «Обгон на встречной полосе»: транспортное средство начинает обгон, выезжая на встречную полосу, при этом на встречу движется другой автомобиль.
Действия комплекса:
– датчик 11 расстояния фиксирует выезд транспортного средства на встречную полосу и приближение встречного автомобиля;
– процессор 5 обработки данных анализирует данные и определяет вероятность столкновения;
– если вероятность столкновения высокая, то процессор 5 передает команду на экран 9 и элемент 10 звукового оповещения для активации предупреждения водителей;
– водители получают предупреждение и предпринимают действия для предотвращения столкновения (например, обгоняющее транспортное средство возвращается в свою полосу).
Сценарий «Препятствие на дороге»: на дороге появляется препятствие (например, сломанный автомобиль или упавшее дерево), которое создает угрозу для движущихся транспортных средств.
Действия комплекса:
– видеодатчик 12 фиксирует наличие препятствия и передает данные на процессор 5 обработки данных;
– процессор 5 анализирует данные и определяет угрозу для движущихся транспортных средств;
– процессор 5 передает команду на экран 9 и элемент 10 звукового оповещения для активации предупреждения водителей о препятствии на дороге;
– водители получают предупреждение и предпринимают действия для объезда препятствия или остановки.
Сценарий «Нестабильная работа системы»: один из компонентов комплекса (например, датчик 11 или процессор 5) начинает работать нестабильно или выходит из строя.
Действия комплекса:
– процессор 7 контроля получает данные о нестабильной работе от процессора 5 обработки данных;
– процессор 7 контроля анализирует данные и определяет необходимость вмешательства;
– процессор 7 контроля берет на себя задачи процессора 5 обработки данных и передает информацию о неисправности на GSM-модуль 6;
– GSM-модуль 6 отправляет данные о неисправности на удаленный сервер 8 для дальнейшего анализа и принятия мер по устранению неисправности.
Сценарий «Регулирование пропускной способности при ремонте дороги»: на участке дороги проводится ремонт, и необходимо регулировать пропускную способность для предотвращения заторов и аварий.
Действия комплекса:
– датчик 11 расстояния и видеодатчик 12 фиксируют движение транспортных средств к ремонтируемому участку дороги и передают данные на процессор 5 обработки данных;
– процессор 5 анализирует данные и определяет количество транспортных средств, приближающихся к ремонтируемому участку дороги с каждой стороны движения транспорта;
– комплексы обмениваются данными через радиопередатчики и радиоприемники системы 3 радиообмена данными для координации действий;
– один из комплексов активирует экран 9 и элемент звукового оповещения 10 для разрешения проезда транспортных средств с одной стороны;
– комплекс на противоположной стороне активирует экран 9 и элемент 10 звукового оповещения для запрета проезда транспортных средств с противоположной стороны;
– после завершения проезда транспортных средств с одной из сторон движения, процессор 5 обработки данных инициализирует смену направления движения.
Сценарий «Высокая загруженность дороги»: на участке дороги наблюдается высокая загруженность транспортными средствами, что может привести к заторам и аварийным ситуациям.
Действия комплекса:
– датчик 11 расстояния и видеодатчик 12 фиксируют высокую загруженность дороги и передают данные на процессор 5 обработки данных;
– процессор 5 анализирует данные и определяет необходимость информирования водителей о загруженности;
– процессор 5 передает команду на экран 9 для отображения информации о загруженности дороги и возможных объездных путях;
– водители получают информацию и могут принять решение об изменении маршрута для объезда заторов.
Приведенные примеры возможных сценариев работы заявленного комплекса демонстрируют, как различные элементы комплекса реагирует на возникающие ситуации на дороге, обеспечивая своевременное предупреждение и повышение безопасности дорожного движения.
Примеры возможных сценариев обмена данными заявленного комплекса с удаленным сервером
Сценарий «Регулярная передача данных о состоянии системы»: локальный комплекс регулярно отправляет данные о своем состоянии на удаленный сервер для мониторинга и анализа.
Действия комплекса:
– процессор 5 обработки данных собирает информацию о состоянии всех компонентов комплекса (например, уровень заряда батареи, работоспособность датчиков и процессоров);
– GSM-модуль 6 получает эти данные от процессора 5 обработки данных;
– GSM-модуль 6 отправляет данные на удаленный сервер 8;
– удаленный сервер 8 принимает данные и сохраняет их для дальнейшего анализа и мониторинга.
Сценарий «Передача данных о дорожной обстановке»: локальный комплекс отправляет данные о текущей дорожной обстановке на удаленный сервер для анализа и принятия решений.
Действия комплекса:
– датчик 11 расстояния и видеодатчик 12 фиксируют текущую дорожную обстановку и передают данные на процессор 5 обработки данных;
– процессор обработки данных анализирует данные и формирует отчет о дорожной обстановке;
– GSM-модуль 6 получает отчет от процессора обработки данных;
– GSM-модуль 6 отправляет отчет на удаленный сервер 8;
– удаленный сервер 8 принимает данные и использует их для анализа дорожной ситуации и принятия решений (например, информирование других водителей или служб).
Сценарий «Получение команд для обновления ПО»: удаленный сервер отправляет команду на локальный комплекс для обновления программного обеспечения.
Действия комплекса:
– удаленный сервер 8 формирует команду для обновления ПО и отправляет ее на GSM-модуль 6 заявленного комплекса;
– GSM-модуль 6 принимает команду и передает ее на процессор 5 обработки данных;
– процессор 5 обработки данных инициализирует процесс обновления ПО, загружая необходимые файлы и перезапуская систему после завершения обновления.
Сценарий «Передача данных о неисправностях»: локальный комплекс обнаруживает неисправность и отправляет данные об этом на удаленный сервер для диагностики и принятия мер.
Действия комплекса:
– процессор 7 контроля обнаруживает неисправность в одном из компонентов комплекса;
– процессор 7 контроля передает данные о неисправности на GSM-модуль 6;
– GSM-модуль 6 отправляет данные о неисправности на удаленный сервер 8;
– удаленный сервер 8 принимает данные и инициализирует процесс диагностики и устранения неисправности (например, отправка команды на перезапуск или замена компонента).
Сценарий «Получение команд для изменения настроек»: удаленный сервер отправляет команду на локальный комплекс для изменения настроек (например, изменение порога срабатывания оповещения).
Действия комплекса:
– удаленный сервер 8 формирует команду для изменения настроек и отправляет ее на GSM-модуль 6 локального комплекса;
– GSM-модуль 6 принимает команду и передает ее на процессор 5 обработки данных;
– процессор 5 обработки данных изменяет настройки в соответствии с полученной командой и подтверждает выполнение на удаленный сервер 8.
Сценарий «Экстренная передача данных»: локальный комплекс обнаруживает критическую ситуацию (например, массовое ДТП) и отправляет данные на удаленный сервер для немедленного реагирования.
Действия комплекса:
– датчик расстояния 11 и видеодатчик 12 фиксируют критическую ситуацию и передают данные на процессор 5 обработки данных;
– процессор 5 обработки данных анализирует данные и определяет, что ситуация критическая;
– GSM-модуль 6 получает данные о критической ситуации от процессора 5 обработки данных;
– GSM-модуль 6 отправляет данные на удаленный сервер 8 с высоким приоритетом;
– удаленный сервер 8 принимает данные и инициализирует экстренные меры (например, уведомление экстренных служб и других водителей).
Приведенные примеры сценариев демонстрируют, как заявленный комплекс взаимодействует с удаленным сервером 8 для обеспечения эффективного мониторинга, управления и реагирования на различные ситуации на дороге.
Примеры статистических данных о дорожной обстановке, передаваемые заявленным комплексом на удаленный сервер
Комплекс может передавать на удаленный сервер 8 различные статистические данные о дорожной обстановке, которые могут быть использованы для анализа и прогнозирования, например:
– плотность дорожного трафика: количество транспортных средств на определенном участке дороги за единицу времени;
– скорость движения: средняя скорость транспортных средств на определенном участке дороги;
– время задержки: среднее время задержки транспортных средств на определенном участке дороги;
– инциденты и аварии: количество и типы инцидентов (аварии, поломки, дорожные работы и т.д.);
– состояние дорожного покрытия: информация о состоянии дорожного покрытия (наличие льда, снега, ям и т.д.);
– загруженность перекрестков и светофоров: время ожидания на перекрестках и светофорах;
– поток пешеходов: количество пешеходов на определенных участках дороги.
Описанные статистические данные могут обрабатываться на удаленном сервере 8 для построения прогнозов дорожной обстановки, используя различные методы анализа данных и машинного обучения. например:
– анализ временных рядов: использование методов анализа временных рядов (например, ARIMA, SARIMA) для прогнозирования плотности дорожного трафика, скорости движения и времени задержки на основе исторических данных;
– машинное обучение: применение алгоритмов машинного обучения (например, регрессионные модели, деревья решений, нейронные сети) для прогнозирования дорожной обстановки на основе множества факторов (плотность дорожного трафика, погодные условия, инциденты и т.д.);
– геопространственный анализ: использование методов геопространственного анализа для выявления закономерностей и аномалий в дорожной обстановке на различных участках дороги;
– симуляционные модели: создание симуляционных моделей дорожного движения для прогнозирования последствий различных событий (например, аварий, дорожных работ) на дорожную обстановку.
Данные собранные и обработанные на удаленном сервере 8 заявленного комплекса могут быть использованы для управления дорожным движением, планирования дорожной инфраструктуры, повышения безопасности дорожного движения, в охранных и военных целях, для экологического мониторинга, логистики и доставки различных грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предотвращения столкновения транспортного средства с другим участником движения | 2020 |
|
RU2750467C1 |
| Способ непрерывного контроля психофизиологического состояния водителей, перевозящих опасные грузы и пассажиров по дорогам общего пользования, система, его реализующая, и блок обработки и управления, используемый в ней | 2015 |
|
RU2662293C2 |
| Система обеспечения безопасности дорожного движения | 2021 |
|
RU2767795C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2018 |
|
RU2681451C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ НА УЧАСТКАХ ДОРОГ ВНЕ НАСЕЛЕННЫХ ПУНКТОВ | 2021 |
|
RU2770723C1 |
| Способ предотвращения столкновения транспортных средств | 2015 |
|
RU2616114C1 |
| СИСТЕМА ИНФОРМИРОВАНИЯ И ОРИЕНТИРОВАНИЯ ИНВАЛИДОВ ПО ЗРЕНИЮ | 2024 |
|
RU2830040C1 |
| ПЕРЕНОСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ИНТЕЛЛЕКТУАЛЬНОГО АНАЛИЗА ДОРОЖНОЙ ОБСТАНОВКИ | 2021 |
|
RU2762591C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| СПОСОБ И КОГНИТИВНАЯ СИСТЕМА ВИДЕОАНАЛИЗА, МОНИТОРИНГА, КОНТРОЛЯ СОСТОЯНИЯ ВОДИТЕЛЯ И ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2018 |
|
RU2684484C1 |
Изобретение относится к комплексу оповещения участников дорожного движения для предотвращения их столкновений. Комплекс состоит из системы информирования с экраном, системы распознавания и фиксации дорожной обстановки с датчиками расстояния и видеодатчиками, системы радиообмена данными, GSM-модуля, удаленного сервера, системы электропитания, процессора обработки данных, процессора контроля. Процессор обработки данных выполнен с возможностью приема и обработки данных о скорости и положении транспортных средств и анализа траектории безопасного обгона. Достигается оповещение участников дорожного движения о степени вероятности возникновения столкновения в зоне действия комплекса. 3 з.п. ф-лы, 1 ил.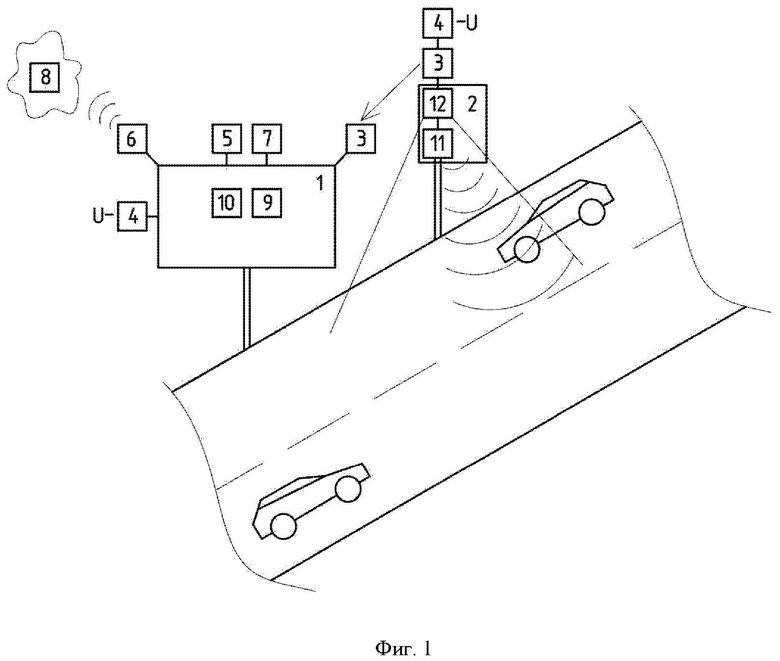
1. Комплекс оповещения участников дорожного движения для предотвращения их столкновений, состоящий из системы информирования с экраном, системы распознавания и фиксации дорожной обстановки на основе датчика расстояния и видеодатчика, системы радиообмена данными, GSM-модуля, удаленного сервера, системы электропитания, процессора обработки данных, выполненного с возможностью приема и обработки данных о скорости и положении транспортных средств, расчета скорости транспортных средств и анализа траектории безопасного обгона по крайней мере одного из транспортных средств, отличающийся тем, что процессор обработки данных выполнен с возможностью инициализации команд для системы информирования по внутреннему защищенному радиоканалу системой радиообмена данными и содержит процессор контроля, выполненный с возможностью контроля функционирования процессора обработки данных и дублирования его функций.
2. Комплекс оповещения участников дорожного движения для предотвращения их столкновений по п. 1, отличающийся тем, что система информирования имеет элемент звукового оповещения.
3. Комплекс оповещения участников дорожного движения для предотвращения их столкновений по п. 1, отличающийся тем, что процессор обработки данных выполнен с возможностью считывания данных системы радиообмена, формирования предупреждающих изображений для вывода на экран и звукового оповещения для системы информирования, обработки, передачи и получения данных и команд на GSM-модуль для обмена с удаленным сервером, контроля параметров системы электропитания.
4. Комплекс оповещения участников дорожного движения для предотвращения их столкновений по п. 1, отличающийся тем, что система электропитания реализована на базе аккумуляторных батарей, фотоэлектрических преобразователей, ветрогенераторов и дизельной подстанции.
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ УЧАСТНИКОВ ДОРОЖНОГО ДВИЖЕНИЯ | 2015 |
|
RU2598362C1 |
| US 8788176 B1, 22.07.2014 | |||
| DE 102018222670 A1, 25.06.2020 | |||
| DE 102011111895 A1, 28.02.2013 | |||
| DE 102015006138 A1, 17.11.2016. | |||

