Изобретение относится к медицинской технике и может быть использовано для оперативного получения информации о кинематических параметрах походки человека.
Под походкой следует понимать совокупность признаков, характеризующих особенности (манеру) ходьбы данного лица. Она связана с функционированием различных отделов центральной и периферической нервной системы, мышечного и опорно-двигательного аппаратов.
Существуют различные способы анализа ходьбы, основанные на регистрации положения частей тела в пространстве.
Для диагностики опорно-двигательной функции человека используют различные устройства и системы.
Известно устройство для определения кинематических параметров движения человека (SU 961676, А61В 5/10, 30.09.82), содержащее контактный датчик, встроенный в обувь испытуемого, блок питания, стереокинокамеру, электросекундомер, сигнальное световое табло.
Недостатком данного устройства является сложность измерения необходимых параметров, в частности длины шага человека в процессе ходьбы, для каждой ноги в отдельности, длительности шагов.
Наиболее близким к заявляемому техническому решению является устройство для анализа походки человека с использованием лазерного дальномера (Патент RU №91837 U1, МПК А61В 5/05, оп. 10.03.2010), содержащее металлическую дорожку, датчики касания с металлической дорожкой, выполненные в виде тонких металлических пластин, закрепленных на подошвах обуви испытуемого. На теле испытуемого закреплен генератор прямоугольных импульсов для инфракрасного излучателя и светорассеивающая мишень. Электронный блок с фотоприемником инфракрасных импульсов, установлен по ходу движения испытуемого и соединен с лазерным дальномером, соединенным в свою очередь с персональным компьютером. Датчики касания соединены с блоком питания и генератором прямоугольных импульсов для инфракрасного излучателя с возможностью испускания инфракрасных импульсов в момент одновременного касания дорожки двумя ногами.
К недостаткам известного технического решения можно отнести то, что оно требует применения специальной токопроводящей дорожки и ограничено длиной дорожки.
В основу изобретения поставлена задача создания простого, недорогого, мобильного, не требующего специальной дорожки для ходьбы и не имеющего ограничений по времени тестирования устройства для анализа походки человека.
Технический результат от применения изобретения заключается в расширении диагностических возможностей устройства для анализа походки человека, в частности получении дополнительных по сравнению с известными техническими решениями параметров ходьбы за счет использования в качестве элемента, регистрирующего положение ног при ходьбе, систему индукционно связанных катушек, а также улучшить его эргономические и эксплуатационные качества.
Это достигается за счет того, что индукционный анализатор кинематических параметров ходьбы пациента, включающий датчики, дорожку, блок питания, персональный компьютер, согласно изобретению содержит систему индукционно связанных катушек и автономное устройство, включающее в себя источник стабилизированного напряжения, генератор низкочастотных электромагнитных колебаний, согласующее устройство, полосовые усилители сигналов и цифровой двухканальный регистратор сигналов; при этом система индукционно связанных катушек включает катушку излучающую низкочастотное электромагнитное поле, ориентированную в саггитальной плоскости и расположенную на одной ноге; при этом система индукционно связанных катушек включает две взаимно перпендикулярные приемные катушки, ориентированные одна в саггитальной, другая во фронтальной плоскостях и расположенные на другой ноге; при этом излучающая катушка подключена к генератору через согласующее устройство; при этом приемные катушки представляют собой датчики индуцированной э.д.с. При этом согласующее устройство представляет собой мостовой усилитель мощности, работающий на излучающую катушку. При этом последовательно с излучающей катушкой установлен конденсатор с емкостью, при которой резонансная частота последовательного контура должна совпадать с частотой генератора. При этом параллельно приемным катушкам подключены конденсаторы такой емкости, при которой резонансная частота параллельных колебательных контуров также равна частоте генератора. При этом персональный компьютер снабжен, по меньшей мере, одним программным продуктом. При этом данные, записанные двухканальным регистратором, находятся в памяти персонального компьютера в виде осциллограмм.
Заявляемое устройство иллюстрируется чертежами.
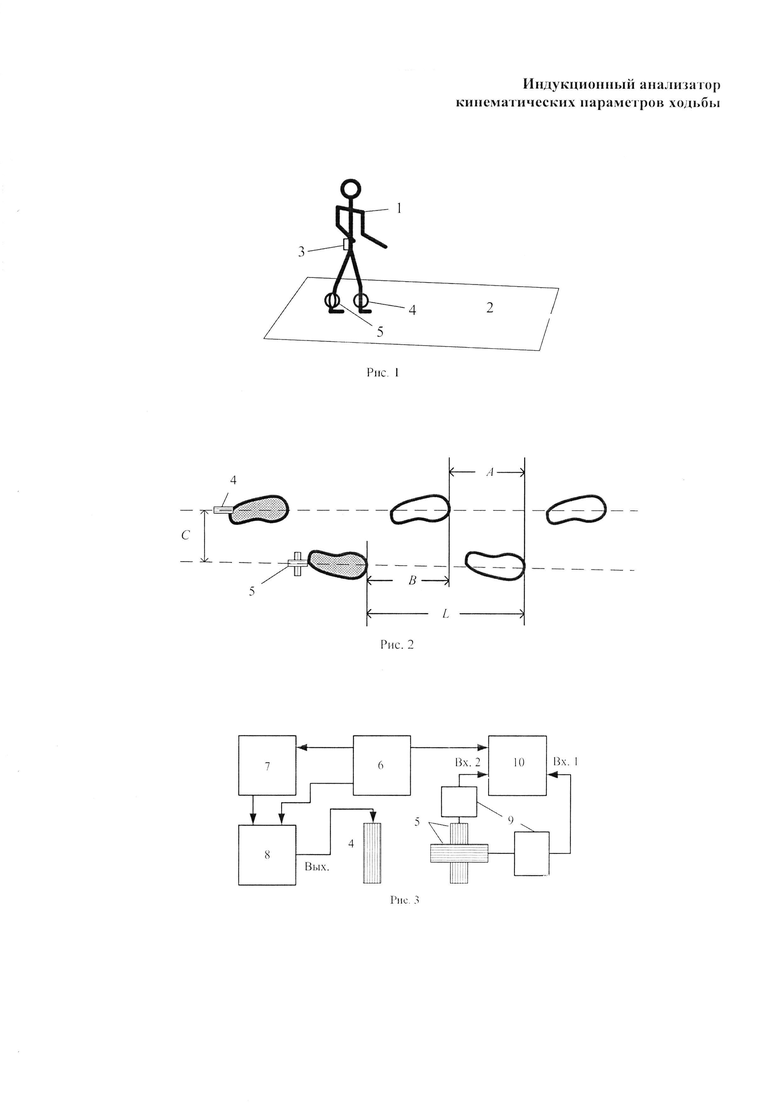
На рис. 1 представлен индукционный анализатор кинематических параметров ходьбы, структурная схема;
на рис. 2 - то же, схема расположения индукционных катушек;
на рис. 3 - то же, структурная схема автономного устройства;
на рис. 4 - то же, осциллограммы сигналов, записанных двухканальным регистратором;
на рис. 5 - то же, увеличенный фрагмент осциллограммы, приведенной на рис. 4;
на рис. 6 - то же, примеры «фазовых портретов» ходьбы (6 «а» ходьбы здорового человека, 6 «б» - человека, страдающего гемипарезом);
на рис. 7 - то же, осциллограмма ходьбы больного гемипарезом.
Позиции обозначают: пациент - 1; дорожка для ходьбы - 2; автономное устройство - 3; излучающая катушка - 4; приемные катушки - 5; источник стабилизированного напряжения - 6; генератор низкочастотных электромагнитных колебаний - 7; согласующее устройство - 8; полосовые усилители сигналов - 9; цифровой двухканальный регистратор - 10.
Устройство содержит не создающие при ходьбе неудобств индукционные катушки: излучающую катушку (4) и приемные катушки (5), которые закреплены на ногах пациента (1) в области голеностопа. Автономное устройство (3) (рис. 3), размещенное на теле пациента (1), включает источник стабилизированного напряжения (6); генератор низкочастотных электромагнитных колебаний (7); согласующее устройство (8); полосовые усилители сигналов (9); цифровой двухканальный регистратор (10). Причем излучающая катушка (4), ориентированная в саггитальной плоскости, предназначена для закрепления на одной ноге пациента (1), две взаимно перпендикулярные приемные катушки (5), ориентированные одна в саггитальной плоскости, другая во фронтальной плоскости (рис. 2) предназначены для закрепления на другой ноге пациента (1). Приемные катушки (5) применены в качестве датчиков индуцированной э.д.с. Согласующее устройство (8) представляет собой мостовой усилитель мощности, работающий на излучающую катушку (4). Для согласования по мощности последовательно с катушкой (4) включен конденсатор (на рисунках не показано) с емкостью, при которой резонансная частота последовательного контура совпадает с частотой генератора (7). Параллельно катушкам (5) подключены конденсаторы, причем резонансная частота параллельных колебательных контуров равна частоте генератора (7).
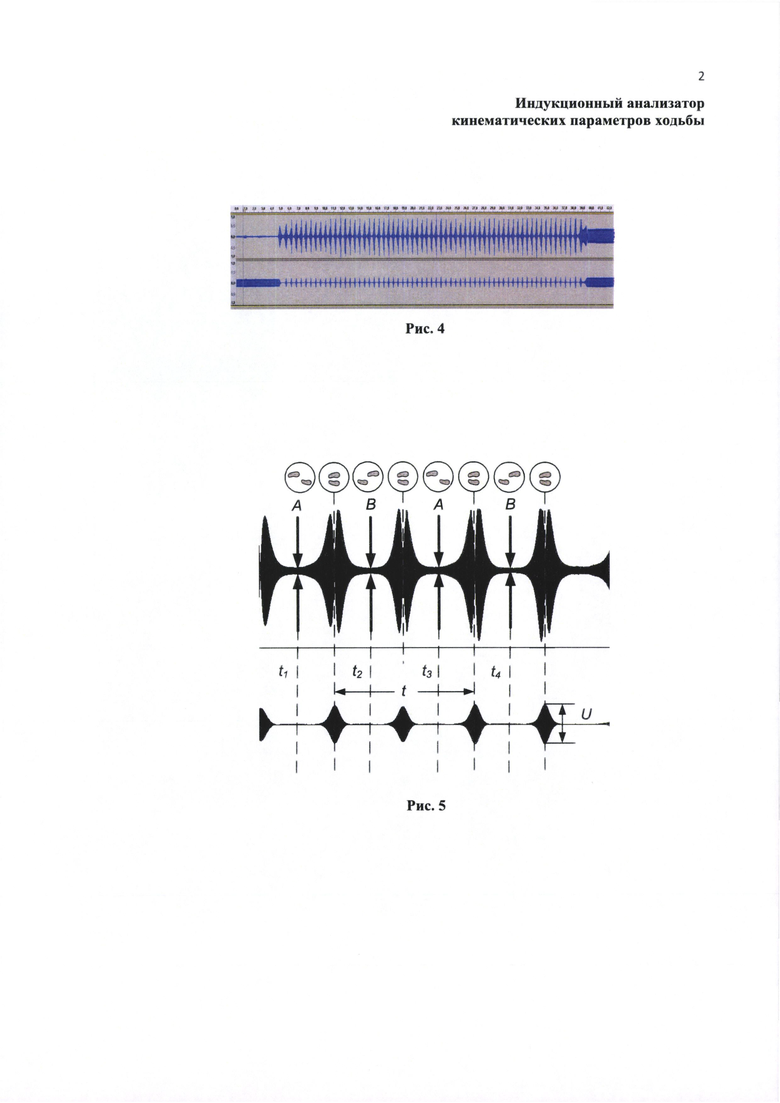
На рис. 4 представлены осциллограммы сигналов, записанных двухканальным регистратором (10) при ходьбе здорового человека из состояния покоя до остановки. Верхняя осциллограмма содержит информацию о расстоянии между ногами пациента в саггитальной плоскости (излучающая катушка ориентирована в саггитальной плоскости, приемная - во фронтальной), а нижняя - о расстоянии между ногами пациента во фронтальной плоскости (приемная катушка ориентирована в саггитальной плоскости).
На рис. 5 показан увеличенный фрагмент осциллограммы, приведенной на рис. 4. В верхней части рисунка в кружках показаны взаимные положения ног, соответствующие определенным моментам времени при ходьбе (фазам ходьбы, см. рис. 2). В момент времени t1, соответствующий фазе двойной опоры (обе ноги неподвижны, правая нога впереди, см. рис. 2), уровень сигнала соответствует длине полушага А. В момент времени t2, также соответствующий фазе двойной опоры (обе ноги неподвижны, левая нога впереди, см. рис. 2), уровень сигнала соответствует длине полушага В.
На нижней осциллограмме показан уровень сигнала от катушки, ориентированной в саггитальной плоскости. Максимум сигнала U соответствует минимальному расстоянию между ногами во фронтальной плоскости (фаза переноса одной ноги относительно другой, расстояние между ногами минимально и соответствует базе опоры С, см. рис. 2). В этот момент времени на верхней осциллограмме от катушки, ориентированной во фронтальной плоскости, сигнал становится равным нулю. Наибольшему расстоянию между ногами (длина полушага) соответствует минимальное значение сигнала.
Так как сигналы в приемных катушках (5) нелинейно зависят от расстояния до излучающей катушки (4), то для перевода информации о показателях походки пациента в метрическую систему необходима предварительная калибровка устройства. Результатом калибровки является формирование двух таблиц:
- для приемной катушки (5), ориентированной в саггитальной плоскости (уровень сигнала как функция расстояния между катушками во фронтальной плоскости);
- для приемной катушки (5), ориентированной во фронтальной плоскости (уровень сигнала как функция расстояния в саггитальной плоскости между катушками при различных фиксированных расстояниях во фронтальной плоскости).
На рис. 6 приведены примеры «фазовых портретов» ходьбы (6 «а» - ходьбы здорового человека, 6 «б» - пациента, страдающего гемипарезом).
Точки, соответствующие левой ноге, обозначены красным цветом, правой ноге - черным.
Осциллограмма ходьбы больного гемипарезом приведена на рис. 7.
Устройство работает следующим образом.
На ногах пациента (1) в области голеностопа прикреплены легкие, не создающие при ходьбе неудобств, индукционные катушки (4 и 5). На теле пациента (1) устанавливается автономное устройство (3). Пациент (1) идет по дорожке для ходьбы (2). На одной ноге пациента (1) закреплена излучающая катушка (4), ориентированная в саггитальной плоскости, на другой - две взаимно перпендикулярные приемные катушки (5), ориентированные одна в - в саггитальной, другая - во фронтальной плоскостях (рис. 2). При этом приемные катушки (5) выполняют роль датчиков индуцированной э.д.с.
Источник стабилизированного напряжения (6) обеспечивает энергией генератор (7), к которому через согласующее устройство (8) подключена излучающая катушка (4). Сигналы от приемных катушек (5) через полосовые усилители сигналов (9) поступают в цифровой двухканальный регистратор (10).
Генератор (7) вырабатывает низкочастотные синусоидальные колебания, которые подаются на вход согласующего устройства (8). При протекании синусоидального переменного тока в катушке (4) в окружающем пространстве возникает электромагнитное поле. Это поле наводит в приемных катушках (5) сигналы, которые усиливаются усилителями (9) и подаются на вход двухканального цифрового регистратора (10) и сохраняются в его памяти. Эти сигналы могут быть переданы по интерфейсу «Bluetooth» в память компьютера (на рисунках не показано).
Э.д.с. в приемных катушках (5) зависит от их ориентации по отношению к излучающей катушке (4). В случае, когда излучающая (4) и приемная (5) катушки параллельны друг другу (обе в саггитальной плоскости) и находятся на минимальном расстоянии друг от друга (это соответствует фазе переноса одной ноги относительно другой), величина наводимой э.д.с. максимальна. Для катушек, перпендикулярных друг другу (излучающая (4) - в саггитальной, приемная (5) - во фронтальной плоскости) и находящихся на минимальном расстоянии друг от друга (т.е. в фазе переноса одной ноги относительно другой), величина наводимой э.д.с. будет равна нулю.
При проведении записи пациент (1) перемещается по дорожке для ходьбы (2), расстояние между излучающими (4) и приемными (5) катушками изменяется и, следовательно, изменяется величина наводимой э.д.с. в приемных катушках (5). Таким образом, измеряя э.д.с. приемной катушки (5), ориентированной в саггитальной плоскости, можно получать информацию о базе опоры ходьбы пациента (1) (рис. 2, параметр С), измеряя э.д.с. приемной катушки (5), ориентированной во фронтальной плоскости - о длине шага (рис. 2, параметры А и В).
На рис. 4 представлены осциллограммы сигналов, записанных двухканальным регистратором (10) при ходьбе здорового человека из состояния покоя до остановки. Верхняя осциллограмма содержит информацию о расстоянии между ногами в саггитальной плоскости, а нижняя - о расстоянии между ногами во фронтальной плоскости.
На рис. 5 показан увеличенный фрагмент осциллограммы, приведенной на рис. 4. В момент времени t1, соответствующий фазе двойной опоры (обе ноги неподвижны, правая нога впереди, см. рис. 2), уровень сигнала соответствует длине полушага А. В момент времени t2, также соответствующий фазе двойной опоры (обе ноги неподвижны, левая нога впереди, см. рис. 2), уровень сигнала соответствует длине полушага В.
На нижней осциллограмме показан уровень сигнала от катушки, ориентированной в саггитальной плоскости. Максимум сигнала U соответствует минимальному расстоянию между ногами в фронтальной плоскости (фаза переноса одной ноги относительно другой, расстояние между ногами минимально и соответствует базе опоры С, см. рис. 2). В этот момент времени на верхней осциллограмме от катушки, ориентированной во фронтальной плоскости, сигнал становится равным нулю. Наибольшему расстоянию между ногами (длина полушага) соответствует минимальное значение сигнала.
Так как сигналы в приемных катушках (5) нелинейно зависят от расстояния до излучающей катушки (4), то для перевода информации о показателях походки пациента (1) в метрическую систему необходима предварительная калибровка устройства. Результатом калибровки является формирование двух таблиц:
- для приемной катушки (5), ориентированной в саггитальной плоскости (уровень сигнала как функция расстояния между катушками во фронтальной плоскости);
- для приемной катушки (5), ориентированной во фронтальной плоскости (уровень сигнал как функция расстояния в саггитальной плоскости между катушками при различных фиксированных расстояниях во фронтальной плоскости).
Процесс обработки результатов, полученных при ходьбе пациента (1), состоит из переноса данных из памяти цифрового регистратора (10) в память компьютера, выбора интересующего участка (путем «обрезки» осциллограмм), задания ноги (правая, левая), соответствующей началу ходьбы на выбранном участке осциллограммы, и обработке данных при помощи специально разработанной программы, которая формирует в электронных таблицах Exel массивы длины и длительности шагов, базы опоры, при дальнейшей обработке которых получаются усредненные маркерные показатели походки человека.
В результате обработки данных тестирования можно получить наиболее важные усредненные маркерные кинематические показатели походки пациента (1), а именно:
- длину «одинарного» шага (правого и левого (параметры А и В)), длину двойного шага L=A+B;
- время (длительность) двойных шагов (правого 

- коэффициент асимметрии длины шага -  ;
;
- коэффициент временной асимметрии двойных шагов - 
- базу опоры С;
- темпоритм (шаг/мин) - 
- средние скорости переноса правой и левой ног 

- среднюю скорость походки - 
В отчет о походке пациента могут быть включены графики длины полушагов или их длительности от номера шага, длины полушагов от их длительности («фазовый» портрет ходьбы).
На рис. 6 приведены примеры «фазовых портретов» ходьбы (6 «а» - ходьбы здорового человека, 6 «б» - человека, страдающего гемипарезом). Точки, соответствующие левой ноге, обозначены красным цветом, правой - черным.
Осциллограмма ходьбы больного гемипарезом приведена на рис. 7.
Области возможного применения изобретения:
1. Клиническая медицина (диагностика заболеваний и мониторинг реабилитации).
2. Научные медико-биологические исследования.
3. Спортивная медицина и тренерская практика.

Изобретение относится к медицинской технике. Индукционный анализатор кинематических параметров ходьбы пациента (1) содержит дорожку для ходьбы (2), блок питания, персональный компьютер, систему индукционно связанных катушек (4, 5) и автономное устройство (3). Автономное устройство (3) включает в себя источник стабилизированного напряжения (6) для обеспечения энергией генератора низкочастотных электромагнитных колебаний (7), к которому через согласующее устройство (8) подключена излучающая катушка (4), а сигналы от приемных катушек (5) через полосовые усилители сигналов (9) поступают в цифровой двухканальный регистратор сигналов (10) и могут быть переданы в память компьютера. Система индукционно связанных катушек (4, 5) включает катушку для излучения низкочастотного электромагнитного поля (4), расположенную на одной ноге и ориентированную в саггитальной плоскости, и две взаимно перпендикулярные приемные катушки (5), расположенные на другой ноге и ориентированные одна в саггитальной, другая во фронтальной плоскостях. Приемные катушки (5) представляют собой датчики индуцированной э.д.с. Применение изобретения позволит расширить диагностические возможности устройства за счет получения дополнительных параметров ходьбы, а также улучшить его эргономические и эксплуатационные качества. 5 з.п. ф-лы, 7 ил.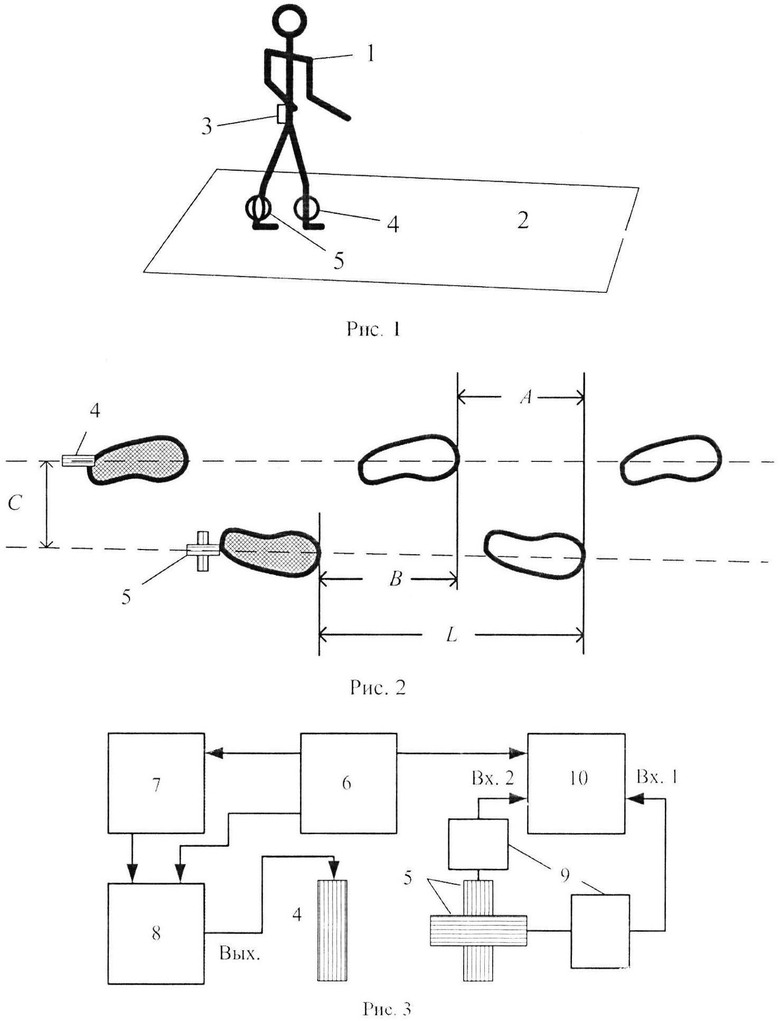
1. Индукционный анализатор кинематических параметров ходьбы пациента, включающий дорожку для ходьбы, блок питания, персональный компьютер, отличающийся тем, что содержит систему индукционно связанных катушек и автономное устройство, включающее в себя источник стабилизированного напряжения, обеспечивающий энергией генератор низкочастотных электромагнитных колебаний, к которому через согласующее устройство подключена излучающая катушка, а сигналы от приемных катушек через полосовые усилители сигналов поступают в цифровой двухканальный регистратор сигналов и могут быть переданы в память компьютера; при этом система индукционно связанных катушек включает катушку, излучающую низкочастотное электромагнитное поле, расположенную на одной ноге и ориентированную в саггитальной плоскости, и две взаимно перпендикулярные приемные катушки, расположенные на другой ноге и ориентированные одна в саггитальной, другая во фронтальной плоскостях; при этом излучающая катушка подключена к генератору через согласующее устройство; при этом приемные катушки представляют собой датчики индуцированной э.д.с.
2. Индукционный анализатор кинематических параметров ходьбы по п. 1, отличающийся тем, что согласующее устройство представляет собой мостовой усилитель мощности, работающий на излучающую катушку.
3. Индукционный анализатор кинематических параметров ходьбы по п. 1, отличающийся тем, что последовательно с излучающей катушкой установлен конденсатор с емкостью, при которой резонансная частота последовательного контура должна совпадать с частотой генератора.
4. Индукционный анализатор кинематических параметров ходьбы по п. 1, отличающийся тем, что параллельно приемным катушкам подключены конденсаторы такой емкости, что резонансная частота параллельных колебательных контуров также равна частоте генератора.
5. Индукционный анализатор кинематических параметров ходьбы по п. 1, отличающийся тем, что персональный компьютер снабжен, по меньшей мере, одним программным продуктом.
6. Индукционный анализатор кинематических параметров ходьбы по п. 1, отличающийся тем, что данные, записанные двухканальным регистратором, находятся в памяти персонального компьютера в виде осциллограмм.
| Оправка для статической балансировки колес | 1950 |
|
SU91837A1 |
| Устройство для контроля техники передвижения спортсмена | 1982 |
|
SU1105209A1 |
| СПОСОБ ОТСЛЕЖИВАНИЯ И ОТОБРАЖЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОЛЬЗОВАТЕЛЯ В ПРОСТРАНСТВЕ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1996 |
|
RU2107328C1 |
| Насадка гидромонитора | 1977 |
|
SU631658A1 |
| US 2014070957 A1, 13.03.2014 | |||
| WO 2014197822 A2, 11.12.2014 | |||
| US 8900325 B2, 02.12.2014 | |||
| US 2003229274 A1, 11.12.2003. | |||

