Область техники
Изобретение относится к геофизической аппаратуре электромагнитных индукционных зондирований, в частности, к способам подавления сигнала прямого поля в приемном сигнале приборов.
Уровень техники
В геофизических устройствах для электромагнитного индукционного зондирования локальные неоднородности удельного сопротивления породы выявляются при создании электромагнитного поля генераторной катушкой и измерении сигнала от токов, индуцированных в земле [1, 2]. Переменный ток в генераторной катушке индуцирует э.д.с. прямого поля в приемной катушке и наводит ток в породе или проводящих объектах, находящихся вблизи устройства. Переменное магнитное поле от индуцированного тока называется вторичным полем, и оно создает в приемной катушке полезный сигнал, величина которого обратно пропорциональна удельному сопротивлению окружающей горной породы. Соответственно, на приемную катушку действует переменное магнитное поле нескольких источников. Сложность выделения полезного сигнала с приемной катушки заключается в превосходстве величины сигнала от прямого поля, на фоне которого полезный сигнал от вторичного поля сопоставим с помехой. Схемы подавления первичного поля имеют различное строение, настройка и калибровка, которых требует применения сложных электротехнических и конструкционных решений, например, таких как, в патенте RU2461850 [3], где применяют замкнутое проволочное кольцо, над которым выполняют измерение сигнала от индуцированных токов в кольце и, сравнивая с расчетом, подбирают моменты катушек и расстояния от центра генераторного диполя до центров приемных диполей.
В многочастотных приборах, патент RU2152058 [1], переменное магнитное поле создается последовательно на многих частотах. На каждой частоте выполняют измерение вторичного магнитного поля двумя приемными датчиками, расположенными вдоль одной прямой с генераторной петлей. Сигнал от прямого поля предварительно подавляют во всем частотном диапазоне (от 2,5 кГц до 250 кГц) методом вычитания сигналов двух катушек, соблюдая условие равенства отношения момента первого датчика к кубу расстояния от центра генераторной петли до центра первого датчика и отношения этих же величин для второго датчика. Недостатком данного метода подавления сигнала прямого поля является уменьшение полезного сигнала. Расчеты показывают, что при идеальной фазировке реальной компоненты, разностный сигнал трехкатушечного зонда над грунтом в 1.7 раза меньше, чем теоретическая реальная компонента полезного сигнала двухкатушечного зонда [4].
Устройство, описанное в патенте RU2502092 [2], предназначено для измерения электропроводности почвы и содержит плоский излучающий контур - источник переменного тока, непроводящую штангу, расположенную под углом к плоскости излучающего контура, набор приемных катушек, закрепленных на непроводящей штанге. Близкий к нулю вертикальный магнитный поток прямого поля через приемные катушки достигается с помощью наклона непроводящей штанги под углом близким к 35 градусам. На этой образующей вертикальная компонента магнитной индукции отсутствует. Недостатком аппаратуры является изменение первоначальной настройки и уровня подавление прямого поля при транспортировке и эксплуатации, ввиду слабой устойчивости к механическим повреждениям [5].
Наиболее близким аналогом к изобретению является устройство со способом обнаружения присутствия слабого магнитного поля, описанным в патенте US9389281 [6], заключающимся в адаптивном формировании компенсационного сигнала от первичного магнитного поля. При такой схеме подавления, недостатком аппаратуры является многократное цифро-аналоговое преобразование (ЦАП) данных от магнитного датчика, в ходе которого может происходить «смещение нуля» согласно описанию характеристик ЦАП, а также согласно теории адаптивной фильтрации, в установившемся режиме значения весовых коэффициентов адаптивных фильтров могут находиться в небольшой окрестности истинного минимума [7], что в совокупности и по отдельности влияет на точность выделения полезного сигнала.
Раскрытие сущности изобретения
Задачей изобретения является повышение надежности измеряемых данных и упрощение конструкции геофизической аппаратуры.
Повышение надежности и упрощение конструкции достигается за счет того, что подавление сигнала прямого поля в индукционной аппаратуре, содержащей генераторную катушку, генератор гармонических сигналов, датчик тока, установленный внутри генераторной катушки и дающий информацию о прямом поле, а также одну или набор приемных катушек (в случае геометрического зондирования - изменение расстояния между генератором и приемником), сигналы от которых через соответствующие цепи, имеющие АЦП (аналого-цифровой преобразователь), преобразовываются в цифровой вид, отличается тем, что подавление сигнала прямого поля выполняется в блоке фильтрации в процессе выделения основных параметров полезного сигнала (сигнал от среды) путем нахождения весовых коэффициентов математической модели, соответствующей сигналу с приемной катушки, что позволяет, например, использовать одну приемную катушку, если сравнивать с патентом RU2152058 [1], причем генератор и приемник жестко закреплены горизонтально в одной плоскости, поэтому настройки аппаратуры не будут изменяться в ходе транспортировки и эксплуатации как в патенте RU2502092 [2].
Ввиду постоянного изменения регистрируемых данных и их зависимости от частоты, целесообразно в аппаратуре индукционного зондирования использовать адаптивные системы фильтрации [7], позволяющие подстраивать изменяемые параметры (весовые коэффициенты) передаточной функции в процессе работы алгоритма. Так как критерием работы адаптивного фильтра часто является достижение минимума целевой функции (функция входного, выходного и требуемого сигналов [7]), определяющего набор параметров фильтра [7], то для повышения надежности и упрощения конструкции критерий работы фильтра должен учитывать преобладание помехи над полезным сигналом и его смещение по фазе, обусловленное свойством исследуемого объекта [8].
В реализованном алгоритме целевая функция содержит математическую модель сигнала с приемной катушки с неизвестными весовыми коэффициентами, при изменении которых невязка между измеренным сигналом с приемной катушки и теоретическим сигналом математического моделирования в целевой функции стремилась к минимуму, - такой подход широко известен и применяется для решения обратных задач [9].
Поскольку при обработке используются стационарные сигналы, то, согласно [7], наиболее подходящей целевой функцией является наименьшие квадраты ошибок:

где Uнаблюденное - сигнал с приемной катушки, Uтеоретическое - математическая модель сигнала, которая представляет реальный процесс взаимодействия электромагнитных полей в генераторной петле, датчике тока и приемной катушке.
Согласно теории, индукция электромагнитного поля внутри генераторной петли равна [10, 11]:

где μ0 - магнитная постоянная, Гн/м; Sg - площадь генераторной петли, м2; Ng - количество витков в генераторной петле; I0 - амплитуда тока, протекающего в цепи, A; Rg - радиус генераторной катушки, м; ƒ - частота, Гц; t - время, сек.
Э.д.с, в датчике тока, который изготовлен в виде небольшой катушки, установленной внутри генераторной петли, равен производной от потока по времени со знаком минус и определяется следующим выражением [11]:

где St - площадь катушки датчика тока; Nt - количество витков в датчике тока.
Сигнал в приемной катушке равен сумме полезного сигнала и сигнала помехи. Э.д.с. прямого поля в приемной катушке отличается по амплитуде и находится в противофазе относительно э.д.с. от датчика тока, по причине их расположения друг относительно друга. Датчик тока находится внутри генераторной петли, а приемная катушка находится за ее пределами, причем обе катушки находятся в одной плоскости. Полезный сигнал, возникающий от индуцированных токов в среде за пределами генераторной петли, отстает на π/2+ϕ (фаза) от первичного поля, а также имеет свою амплитуду [8].
Математическое выражение модели сигнала с приемной катушки можно представить в виде:

где А - амплитуда сигнала прямого поля в приемной катушке; С - амплитуда полезного сигнала.
Последнее выражение можно преобразовать, применяя формулу косинуса разности двух углов и приведя подобные слагаемые. Таким образом математическая модель примет вид:

где:

Для оценки величины э.д.с. прямого поля в приемной катушке применяются данные с токовой катушки. Сигнал с датчика тока описывается выражением (3), с помощью которого, зная амплитуду образцового сигнала, можно вычислить амплитуду тока в генераторной петле:

где εt - амплитудное значение э.д.с. с датчика тока.
При достаточном удалении генераторной петли от центра приемной катушки [10], равном больше трех диаметров генератора, последний можно считать диполем и тогда амплитуда сигнала прямого поля в приемной катушке будет равна:

L - расстояние от центра генераторной петли до центра приемной катушки; Sp - площадь генераторной петли; Np - количество витков в генераторной петле;.
Также стоит отметить, что постоянный контроль за током в генераторе необходим для корректной работы аппаратуры, поскольку любое электронное устройство так или иначе подвергается внешним воздействиям, которые влияют на общий функционал. Таким образом конечный вид целевой функции примет вид:

где k - это индекс элемента дискретной записи сигнала.
После нахождения неизвестных весовых коэффициентов (A1, C1) целевой функции, амплитуду и фазу полезного сигнала рассчитываются по следующим формулам:
Отличительной особенностью предлагаемого способа подавления прямого поля, является выделение параметров полезного сигнала, в частности фазы сигнала, которая определяется не через отношение мнимой компоненты сигнала к реальной, как это принято в большинстве приборов индукционного зондирования.
Нахождение истинной амплитуды и фазы полезного сигнала возможно при условии, что целевая функция будет иметь единственный минимум в области допустимых значений. Достаточность доказывается вычислением производных Фреше [12]:
Для удобства вычисления знак суммы в целевой функции был заменен интегралом с границами интегрирования от -∞ до +∞. После вычислений был получен следующий результат:

где ω=2⋅π⋅ƒ - циклическая частота.
Дальнейшее преобразование для вычисления производных Фреше не обязательно, поскольку на данном этапе вычислений видно, что выражения похожи на уравнение прямой, имеющих единственную точку минимума в области допустимых значений для измеряемых данных.
Ввиду того, что в реальных условиях данные с приемной катушки могут содержать собственные помехи аппаратуры или внешние помехи, которые не будут учитываться датчиком тока, после нахождения безусловного минимума функции (9), перед расчетом характеристик полезного сигнала по формулам (10), выполняется проверка наличия полезного сигнала с приемной катушки, основанная на том, что коэффициент А1 определяется характеристиками полезного сигнала и прямого поля согласно выражению (6). Поэтому нахождение относительной погрешности между рассчитанным амплитудным значением сигнала прямого поля по формуле (8) и найденным коэффициентом A1, позволяет оценить наличие полезного сигнала в регистрируемых данных, а если вычесть это значение из 100%, то будет получена процентная оценка сигнала прямого поля, которая позволяет после нахождения коэффициентов А1 и С1 принять решение о вычислении амплитуды и фазы полезного сигнала в соответствии с формулами (10) или пропустить этот этап, полагая что полезный сигнал в измеренных данных отсутствует.
Техническим результатом, при выполнении совокупности приведенных признаков, является повышение надежности выделения полезного сигнала и упрощение конструкции геофизической аппаратуры электромагнитного зондирования, за счет применения цифровой фильтрации, обеспечивающей глубокое подавление сигнала прямого поля на всех частотах и позволяющей расширить динамический диапазон аппаратуры, путем нахождения минимального значения невязки в целевой функции между теоретическим сигналом математического моделирования и измеренным сигналом с приемной катушки, для определения параметров полезного сигнала, в совокупности дающих информацию о среде и объектах подземного пространства, а также простота конструкции аппаратуры по предлагаемому способу уменьшает влияние внешних механических воздействий, не сбивающие настроек и калибровок аппаратуры.
Краткое описание графических материалов
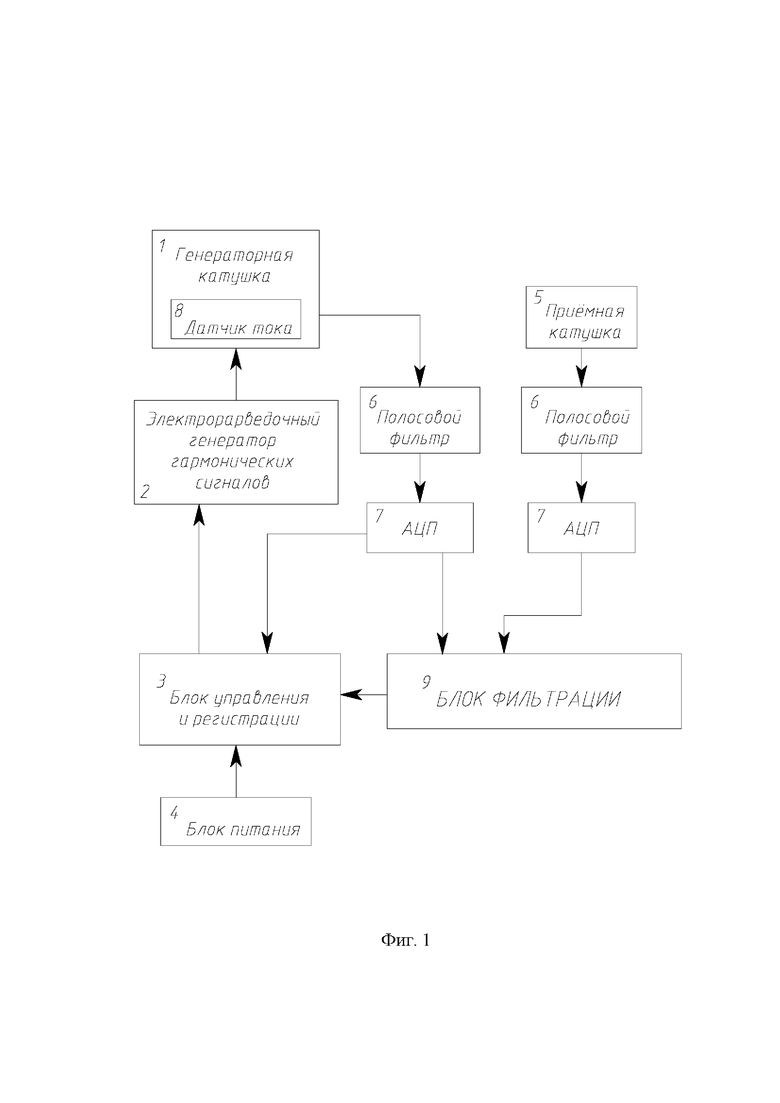
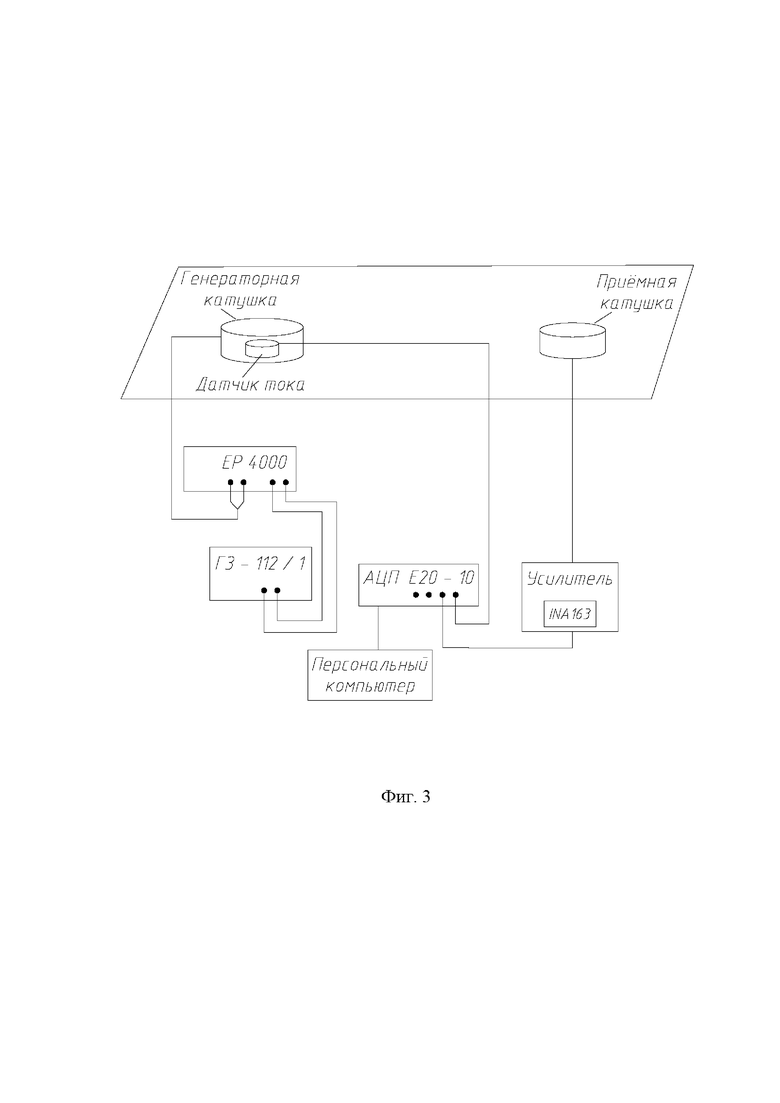
На фиг. 1 представлена структурная схема предлагаемого устройства -аппаратуры индукционного зондирования подземного пространства с блоком подавления прямого поля (фильтрации).
Предлагаемое устройство аппаратуры индукционного зондирования включает в себя генераторную катушку 1, которая подключена к электроразведочному генератору гармонических сигналов 2, который в свою очередь управляется блоком управления и регистрации 3, питающимся от общего блока питания аппаратуры 4. Приемная катушка 5 преобразовывает переменное магнитное поле в э.д.с, соединена с полосовым фильтром 6 и с АЦП 7. Цифровой входной сигнал от приемной катушки 5, представляет собой аддитивную смесь полезного сигнала и сигналов помех, наибольший из которых происходит от первичного поля генератора. Образцовый сигнал получается от комплекса - датчик тока 8, полосовой фильтр 6, АЦП 7, поступает на вход блока фильтрации 9 и регистратор тока 3. Стоит отметить, что полосовые фильтры 6 и АЦП 7 для приемной катушки 5 и датчика тока 8 имеют одинаковые параметры.
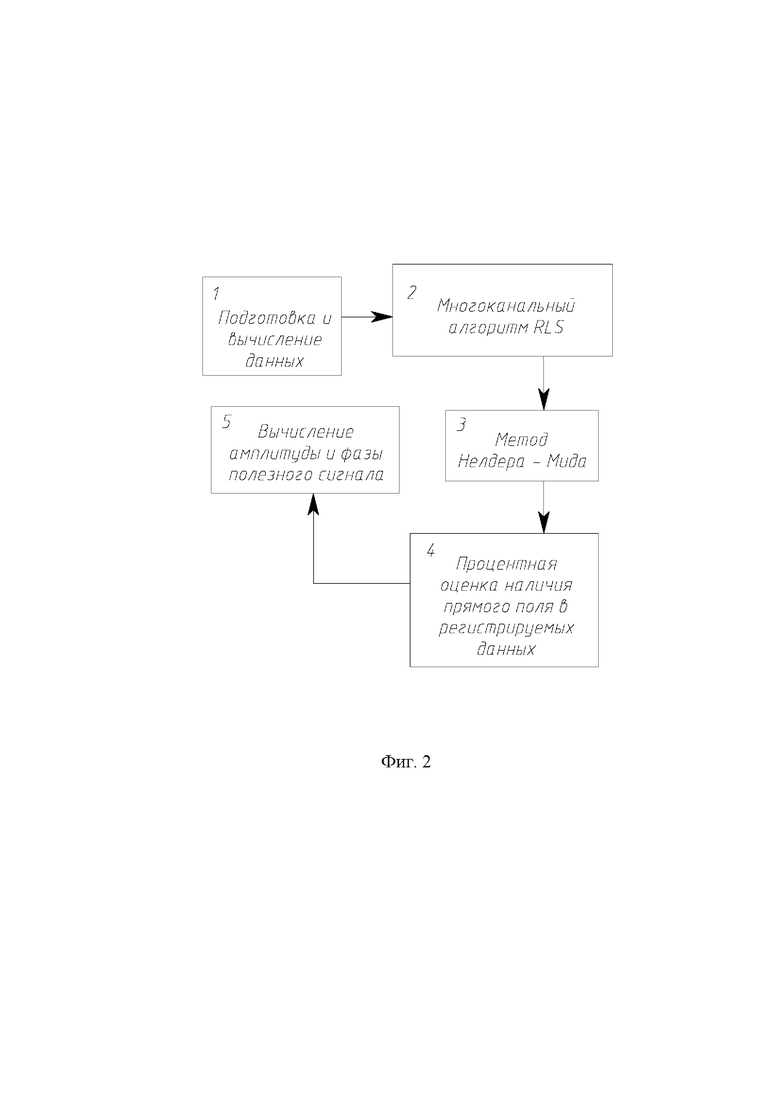
Алгоритм работы блока фильтрации 9, в заявленном изобретении, поясняется чертежом на фиг. 2, где вычисление амплитуды и фазы полезного сигнала происходит после нахождения весовых коэффициентов целевой функции поэтапно:
1. Подготовка регистрируемых (измеряемых) данных 1;
2. Поиск начального приближения для метода Нелдера-Мида, используя многоканальный адаптивный фильтр RLS 2;
3. Нахождение безусловного минимума целевой функции методом Нелдера-Мида 3;
4. Процентная оценка наличия прямого поля в регистрируемых данных 4;
5. Вычисление амплитуды и фазы полезного сигнала 5.
Пример осуществления изобретения
Для апробации предлагаемого технического решения был изготовлен макет, моделирующий работу аппаратуры частотного электромагнитного зондирования, схема макета представлена на Фиг. 3. Макет состоит из генератора гармонических сигналов Г3-112/1; усилителя мощности ЕР4000; усилителя сигнала от приемной катушки, разработанный на основе микросхемы INA163 с коэффициентом усиления 119; а также быстродействующий модуль АЦП Е20-10 (разрядность АЦП 14 бит, частота работы АЦП до 10 МГц) с пределом допускаемой относительной основной погрешности частоты преобразований АЦП - ±0.005%, допускаемой относительной основной погрешности измерений напряжения переменного тока от ±0.2% и с возможностью подключения к компьютеру для управления и сбора данных.
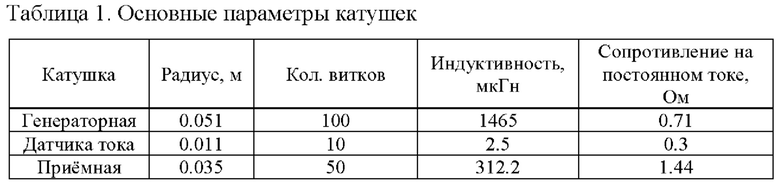
Для проверки способа подавления прямого поля выполнены эксперименты, моделирующие ситуацию расположения прибора в воздухе, когда полезный сигнал отсутствует в регистрируемых данных, и с замкнутым кольцом, лежащим параллельно плоскости макета на глубине 0.22 м, создающим полезный сигнал в приемной катушке. Кольцо сделано из медного провода диаметром 1.5 мм со средним радиусом 0.247 м. Расстояние между центром генераторной катушки и центром приемной катушки 0.605 м. Параметры датчика тока, приемной катушки и генераторной катушки представлены в таблице 1. Далее описываются результаты экспериментов при частоте тока 3 и 10 кГц в генераторной петле и при различной амплитуде тока.
Для поиска весовых коэффициентов заданной целевой функции подготовка измеренных данных и вычислить следующие значения:
1. Амплитуду тока в генераторной петле по формуле 7.
2. Время существования сигнала и шаг дискретизации:
где N - количество периодов,
где m - количество точек данных.
В качестве алгоритма фильтрации используется многоканальный адаптивный фильтр на основе RLS-алгоритма [7, 13]. Выбор алгоритма рекурсивных наименьших квадратов обуславливается тем, что входные сигналы считаются детерминированными, а также данный алгоритм демонстрирует быструю сходимость по сравнению с большинством своих конкурентов [7]. Многоканальность достигается за счет того, что теоретический сигнал математического моделирования представляется в виде двух сигналов, а именно: cos(ω⋅t) и - sin(ω⋅t).
Стоит отметить, что нахождение минимального значения невязки в целевой функции (9) может быть выполнено разными адаптивными алгоритмами, однако, как отмечалось ранее, в установившемся режиме значения весовых коэффициентов адаптивных фильтров могут находиться в окрестности истинного минимума [7]. Поэтому для проверки и уточнения ВК используется метод Нелдера-Мида, также известный как метод деформируемого многогранника и симплекс-метод. Алгоритм позволяет находить безусловный минимум функции нескольких переменных, не используя производной (точнее - градиента) функции, а поэтому может применяться к негладким и/или зашумленным функциям [14]. Последовательность шагов для реализации алгоритма метода Нелдера-Мида подробно описана в [15]. Суть метода заключается в последовательном перемещении и деформировании симплекса вокруг точки экстремума и требует начального приближения. Поэтому, после реализации адаптивного фильтра по полученным значениям коэффициентов, формируется симплекс, в соответствии с методом Нелдера-Мида, и далее используется для нахождения безусловного минимума функции (9). После нахождения весовых коэффициентов рассчитывалась процентная оценка сигнала прямого поля в регистрируемых данных и определялись амплитуда и фаза полезного сигнала.
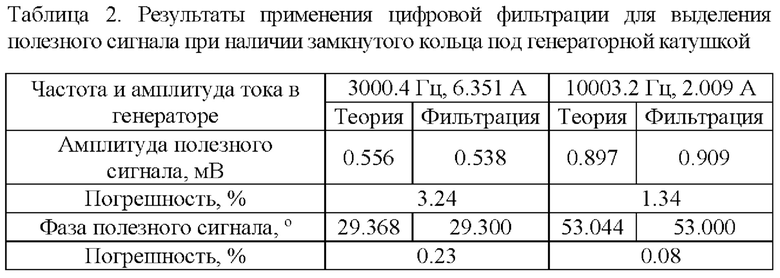
При размещении прибора в воздухе в отсутствии замкнутого кольца, приемная катушка регистрировала только сигнал прямого поля, соответственно, согласно логике алгоритма, при заданной оценке наличия прямого поля (помехи) в регистрируемых данных больше 95%, характеристики полезного сигнала приравнивались к нулю. Так для частоты 3000.4 Гц коэффициент A1=8.662⋅10-3, а амплитудное значение прямого поля по формуле (8) равняется 8.66⋅10-3, соответственно процентная оценка наличия прямого поля равна 99.98%, и для частоты 10003.2 Гц, амплитудное значение прямого поля равно 9.101⋅10-3, коэффициент A1=9.152⋅10-3, и тогда, на этой частоте, прямое поле удалось подавить на 99.44%.
Для сравнения, при замкнутой петле на частоте 3000.4 Гц, коэффициент A1=8.75⋅10-3, а амплитудное значение прямого поля равно 8.28⋅10-3, тогда процентная оценка наличия прямого поля равна 94.63%, что указывает на наличие полезного сигнала в данных с приемной катушки. Также для частоты 10003.2 Гц коэффициент A1=9.22⋅10-3 и амплитудное значение прямого поля равно 8.67⋅10-3, соответственно оценка наличия прямого поля равна 93.93%.
Данные регистрировались с частотой дискретизации 500 кГц. На каждой рабочей частоте записывалось десять периодов с синхронизацией по каналу сигнала от датчика тока. Результаты фильтрации сравнивались с теоретическим расчетом магнитных полей с дипольными источниками и приемниками [3, 8, 10, 11, 16, 17] (таблица 2).
Литература
1. Способ индукционного частотного зондирования: пат.RU №2152058 С1 / А.К. Манштейн, М.И. Эпов, В.В. Воевода, К.В. Сухорукова; заявитель и патентообладатель Институт геофизики СО РАН; опубл. 27.06.2000, Бюл. №18. 4 с.
2. Способ и устройство для индукционного частотного зондирования: пат.RU №2502092 С2 / А.К. Манштейн, Е.В. Балков; заявитель и патентообладатель Институт нефтегазовой геологии и геофизики СО РАН; опубл. 20.12.2013, Бюл. №35.
3. Способ калибровки устройства для наземного электромагнитного частотного зондирования: пат.RU №2461850 С2/ А.К. Манштейн, М.И. Эпов, Е.В. Балков, К.В. Сухорукова; заявитель и патентообладатель Институт нефтегазовой геологии и геофизики СО РАН; опубл. 20.09.2012 Бюл. №26. 4 с.
4. Балков Е.В., Манштейн А.К. Сравнение характеристик двух- и трехкатушечной реализации индукционных зондов для малоглубинного частотного зондирования // Геофизический вестник. - 2006. - №1. - С. 12-17.
5. Фадеев Д.И., Балков Е.В., Панин Ю.Г., Карин Ю.Г. Калибровка и экспресс-трансформация сигналов компактной аппаратуры малоглубинного электромагнитного профилирования // Геофизика. - 2018. - №2. - С. 52-57.
6. Magnetic compensation circuit and method for compensating the output of a magnetic sensor, responding to changes in a first magnetic field: pat. US Pub. No.: 9389281 B2 / G. F. West, P. W. Walker, B. D. Polzer; Application Vale S. A.; pub. Date 12.07.2016. 12 p.
7. Джиган В.И. Адаптивная фильтрация сигналов: теория и алгоритмы. - М.: техносфера, 2013. - 528 с.
8. Параснис Д.С. Принципы прикладной геофизики; перевод с английского С.Д. Виноградова; под редакцией В.Н. Жаркова. - М.: Мир, 1965. - 200 с.
9. Митрофанов Г.М. Обратные задачи геофизики. - Новосибирск: РИЦ НГУ, 2015. - 101 с.
10. Кауфман А.А. Введение в теорию геофизических методов. Часть 2. Электромагнитные поля. - М.: Недра, 2000. - 483 с.
11. Яворский Б.М., Детлаф А.А. Справочник по физике: 3-е изд., испр. - М.: Наука, 1990. - 624 с.
12. Корпусов М.О., Панин А.А. Лекции по линейному и нелинейному функциональному анализу. Том 3. Нелинейный анализ. - М.: Физический факультет МГУ, 2016. - 235 с.
13. Джиган В.И. Параллельные регуляризированные RLS - алгоритмы многоканальной адаптивной фильтрации // Цифровая Обработка Сигналов. - 2004. -№2. - С. 7-13.
14. Гладилин П.Е., Боченина К.О. Технологии машинного обучения. - СПб.: Университет ИТМО, 2020. - 75 с.
15. Банди Б. Методы оптимизации. Вводный курс: перевод с английского. -М.: Радио и связь, 1988. - 128 с.
16. Тамм И.Е. Основы теории электричества. - М.: Наука, 1966. - 624 с.
17. Балков Е.В., Манштейн А.К. Трехкатушечный индукционный зонд в частотном зондировании // Геофизический вестник. - 2001. - №12. - с. 17-20.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНДУКЦИОННОГО ЧАСТОТНОГО ЗОНДИРОВАНИЯ | 2011 |
|
RU2502092C2 |
| СПОСОБ КАЛИБРОВКИ УСТРОЙСТВА ДЛЯ НАЗЕМНОГО ЭЛЕКТРОМАГНИТНОГО ИНДУКЦИОННОГО ЧАСТОТНОГО ЗОНДИРОВАНИЯ | 2010 |
|
RU2461850C2 |
| СПОСОБ ИНДУКЦИОННОГО ЧАСТОТНОГО ЗОНДИРОВАНИЯ | 1998 |
|
RU2152058C1 |
| Способ высокоточных электромагнитных зондирований и устройство для его осуществления | 2016 |
|
RU2629705C1 |
| СПОСОБ ДИАГНОСТИКИ ЖЕЛЕЗНОДОРОЖНОЙ НАСЫПИ, ЕЕ ОСНОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2660750C1 |
| СПОСОБ ИЗМЕРЕНИЯ И ОБРАБОТКИ ПЕРЕХОДНЫХ ПРОЦЕССОВ С ЗАЗЕМЛЕННОЙ ЛИНИЕЙ ПРИ ИМПУЛЬСНОМ ВОЗБУЖДЕНИИ ПОЛЯ ЭЛЕКТРИЧЕСКИМ ДИПОЛЕМ С ЦЕЛЬЮ ПОСТРОЕНИЯ ГЕОЭЛЕКТРИЧЕСКИХ РАЗРЕЗОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА С ПОМОЩЬЮ АППАРАТНО-ПРОГРАММНОГО ЭЛЕКТРОРАЗВЕДОЧНОГО КОМПЛЕКСА (АПЭК "МАРС") | 2012 |
|
RU2574861C2 |
| СПОСОБ ОБЪЕМНОЙ РЕКОНСТРУКЦИИ ЭЛЕКТРОФИЗИЧЕСКОЙ МОДЕЛИ ПОДПОВЕРХНОСТНОЙ СРЕДЫ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОЙ ЭЛЕКТРОМАГНИТНОЙ СИСТЕМЫ | 2024 |
|
RU2836589C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2012 |
|
RU2544260C2 |
| СПОСОБ ЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2354999C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ЗОНДИРОВАНИЯ | 2015 |
|
RU2601282C1 |
Изобретение относится к электромагнитным индукционным зондированиям, в частности к подавлению сигнала прямого поля в приемном сигнале. Сущность: подавление сигнала прямого поля выполняют в блоке фильтрации с использованием многоканального адаптивного RLS-алгоритма путем определения весовых коэффициентов при минимизации невязки целевой функции, характеризующей разность между измеренным и моделируемым сигналами с приемной катушки, формированием по полученным значениям коэффициентов симплекса в соответствии с методом Нелдера-Мида для нахождения безусловного минимума целевой функции. Проводят процентную оценку наличия сигнала прямого поля в регистрируемых данных и вычисляют амплитуды и фазы полезного сигнала на основе весовых коэффициентов. Устройство состоит из генераторной катушки, генератора гармонических сигналов, датчика тока, установленного внутри генераторной катушки и дающего информацию о прямом поле, а также одной или набора приемных катушек. Сигналы от катушек через соответствующие цепи, имеющие полосовой фильтр и аналого-цифровой преобразователь, соединены с блоком фильтрации, где амплитуда и фаза полезного сигнала вычисляются с использованием многоканального адаптивного RLS-алгоритма. Технический результат: повышение надежности выделения полезного сигнала и упрощение конструкции геофизической аппаратуры электромагнитного зондирования. 2 н.п. ф-лы, 3 ил., 2 табл.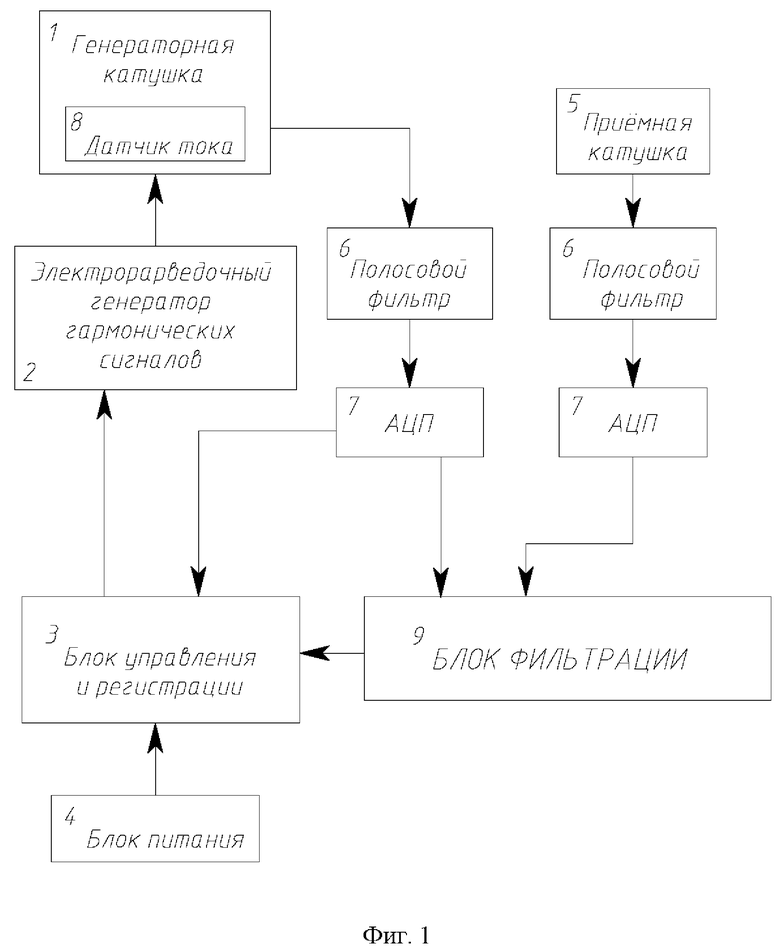
1. Способ подавления сигнала прямого поля при электромагнитном индукционном зондировании, включающий измерение суммы сигналов прямого поля и полезного сигнала от среды в приемной катушке и сигнала датчика тока, установленного внутри генераторной катушки и дающего информацию о прямом поле, полосовую фильтрацию и оцифровку измеренных данных, отличающийся тем, что подавление сигнала прямого поля выполняют в блоке фильтрации с использованием многоканального адаптивного RLS-алгоритма путем определения весовых коэффициентов при минимизации невязки целевой функции, характеризующей разность между измеренным и моделируемым сигналами с приемной катушки, формированием по полученным значениям коэффициентов симплекса в соответствии с методом Нелдера-Мида для нахождения безусловного минимума целевой функции, процентной оценкой наличия сигнала прямого поля в регистрируемых данных и вычислением амплитуды и фазы полезного сигнала на основе весовых коэффициентов.
2. Устройство подавления сигнала прямого поля при электромагнитном зондировании, состоящее из генераторной катушки, генератора гармонических сигналов, датчика тока, установленного внутри генераторной катушки и дающего информацию о прямом поле, а также одной или набора приемных катушек, сигналы от которых через соответствующие цепи, имеющие полосовой фильтр и аналого-цифровой преобразователь, соединены с блоком фильтрации, где амплитуда и фаза полезного сигнала вычисляются с использованием способа подавления сигнала прямого поля по п. 1.
| Способ высокоточных электромагнитных зондирований и устройство для его осуществления | 2016 |
|
RU2629705C1 |
| СПОСОБ ИНДУКЦИОННОГО ЧАСТОТНОГО ЗОНДИРОВАНИЯ | 1998 |
|
RU2152058C1 |
| Свеча для двигателей внутреннего горения | 1933 |
|
SU32855A1 |
| Измерительное устройство для геоэлектроразведки | 1976 |
|
SU702334A1 |
| CN 103424780 B, 18.05.2016 | |||
| US 9389281 B2, 12.07.2016 | |||
| US 20100052685 A1, 04.03.2010 | |||
| US 20090295391 A1, 03.12.2009. | |||

