Настоящее изобретение касается устройства канатной дороги для перемещения людей или, соответственно, грузов, имеющего две пары несущих канатов, распространяющихся между двумя конечными станциями, в частности нижней конечной станцией и верхней конечной станцией, по которым посредством по меньшей мере одного тягового каната могут передвигаться транспортные средства, причем эти несущие канаты в области по меньшей мере одной несущей опоры проходят криволинейно, и тяговый канат в области указанной по меньшей мере одной несущей опоры проведен через опорные ролики.
У известных устройств канатных дорог такого рода несущие канаты по участку пути опираются на опоры, при этом они в области опор могут проходить по изгибам. Благодаря этому возможна адаптация хода устройства канатной дороги к топографическим условиям.
Движение транспортных средств осуществляется посредством по меньшей мере одного тягового каната. В частности, для этого предусмотрен замкнутый тяговый канат, который на конечных станциях проведен через направляющие шкивы, по меньшей мере один из которых является приводным.
По ходу участка пути указанный по меньшей мере один тяговый канат проведен через опорные ролики. Для этого предусмотрены закрепленные на соответственно сгруппированных друг с другом несущих канатах выступающие вниз канатные подвески, на каждой из которых опирается по меньшей мере один опорный ролик, служащий опорой для тягового каната. Тяговый канат находится при этом примерно в середине под несущими канатами. В областях опор тяговый канат тоже проведен через опорные ролики, которые опираются на неподвижные держатели роликов.
Так как тяговый канат сцеплен с механизмом передвижения транспортного средства в тех областях, в которых находится механизм передвижения, это приводит к тому, что он отрывается от находящихся в этой области опорных роликов и только тогда, когда механизм передвижения удалился от этих опорных роликов, снова попадает на эти опорные ролики. В тех областях участка пути, в которых этот участок проходит прямолинейно, тяговый канат опускается, после того как механизм передвижения удалился от соответствующих опорных роликов, в вертикальном направлении, при этом он попадает на эти ролики в середине.
В отличие от этого, тогда, когда несущие канаты проходят криволинейно, в областях изгибов тяговый канат не только отрывается транспортным средством с находящихся там опорных роликов, но и смещается в боковом направлении относительно этих опорных роликов, при этом также при его опускании на эти ролики остается смещенным в боковом направлении. Из-за этого тяговый канат не попадает обратно на опорные ролики в середине, поэтому он не попадает непосредственно на находящиеся на этих роликах канавки для канатов. Из-за этого в областях изгибов на опорных роликах возникают поперечные смещения тягового каната, вследствие которых либо тяговый канат не попадает больше в канавки соответствующих опорных роликов, либо тяговый канат придвигается к канавкам на опорных роликах, что приводит к повышенному износу опорных роликов.
Таким образом, в основе настоящего изобретения лежит задача - избежать этих недостатков. В соответствии с изобретением это достигается за счет того, что по меньшей мере некоторые из находящихся в области указанной по меньшей мере одной опоры опорных роликов указанного по меньшей мере одного тягового каната могут переставляться по своему положению относительно обоих несущих канатов.
При изменении положения опорных роликов в областях криволинейно проходящих несущих канатов соответствующие опорные ролики, равным образом, как и тяговый канат, смещаются в боковом направлении, благодаря чему обеспечивается, что тяговый канат при своем опускании попадает на эти опорные ролики примерно в середине, благодаря чему он попадает в канавки опорных роликов, и таким образом предотвращаются боковые смещения опущенного на опорные ролики тягового каната и обусловленный ими износ опорных роликов.
Предпочтительно опорные ролики могут переставляться под действием переставляющей силы. При этом соответствующий опорный ролик указанного по меньшей мере одного тягового каната может быть опирается на поворотный рычаг или т.п., который может поворачиваться по высоте вокруг по меньшей мере приблизительно горизонтальной оси под действием переставляющего устройства, в частности переставляющей пружины. При этом несущие канаты в области указанной по меньшей мере одной опоры могут опираться на держатели, в частности, несущие листы, на которые с возможностью поворота по высоте опирается поворотный рычаг, на который опирается опорный ролик указанного по меньшей мере одного тягового каната.
В частности, на опоре могут быть закреплены держатели, в частности, несущие листы, на которых находятся опорные стойки несущих канатов, при этом поворотный рычаг шарнирно соединен с помощью опирающегося на него опорного ролика с одним из двух держателей, а другой из двух держателей выполнен с упорами для поворотного рычага.
По другому варианту осуществления оба несущих каната в области указанной по меньшей мере одной опоры опираются каждый на один держатель, в частности, на несущие листы, и эти держатели наклонно ориентированным соединительным раскосом соединены друг с другом, и на этот соединительный раскос с возможностью смещения опирается находящаяся под действием возвратной силы, в частности, пружины сжатия, втулка, на которую опирается опорный ролик. При этом для обладающей возможностью смещения втулки может быть предусмотрен упор.
Кроме того, оба несущих каната в области указанной по меньшей мере одной опоры могут опираться каждый на один держатель, в частности на несущие листы, и эти два держателя соединены друг с другом соединительным раскосом, причем на этот соединительный раскос опираются два направляющих рычага, к которым шарнирно присоединен держатель опорного ролика, причем этот держатель находится под действием переставляющей силы, в частности пружины сжатия, посредством которой он может переставляться в боковом направлении относительно держателей несущих канатов, в частности несущих листов.
Кроме того, один из двух держателей, в частности несущих листов, может быть выполнен с упором.
По другому варианту осуществления в области указанной по меньшей мере одной опоры предусмотрены держатели, в частности вертикальные несущие листы, между которыми на неподвижный палец с возможностью поворота опирается поворотный рычаг, на который опирается опорный ролик, причем этот поворотный рычаг под действием переставляющей силы, в частности, груза или, соответственно, электродвигателя может переставляться из нижнего положения поворота в верхнее положение поворота.
Кроме того, поворотный рычаг может быть переставляемым по высоте между двумя упорами.
Предмет изобретения поясняется подробнее ниже с помощью примеров осуществления, изображенных на чертеже. Показано:
фиг. 1, фиг. 1A - предлагаемое изобретением устройство канатной дороги, в схематичном изображении, на виде сбоку и на виде сверху;
фиг. 2 - фрагмент устройства канатной дороги в области опоры, включающий в себя транспортное средство, которое находится вне этой опоры, на виде сбоку;
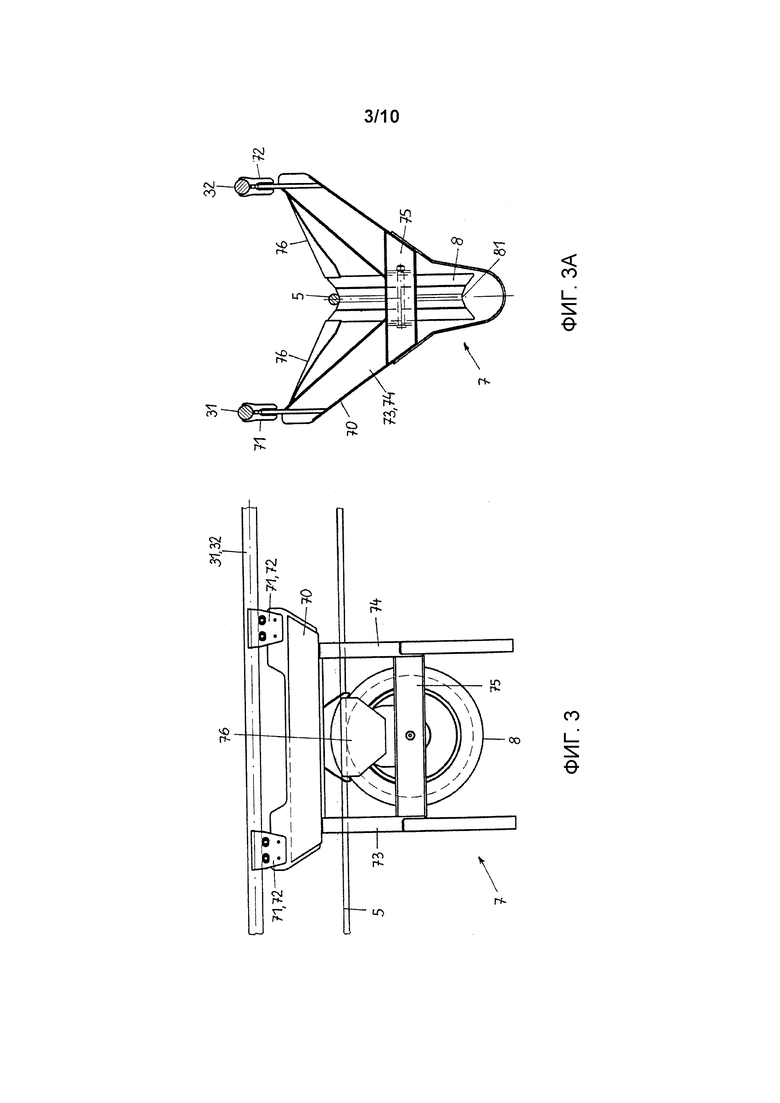
фиг. 3, фиг. 3A - закрепленная на сгруппированных друг с другом несущих канатах канатная подвеска, на которую опирается опорный ролик тягового каната, на виде сбоку и на виде с торца;
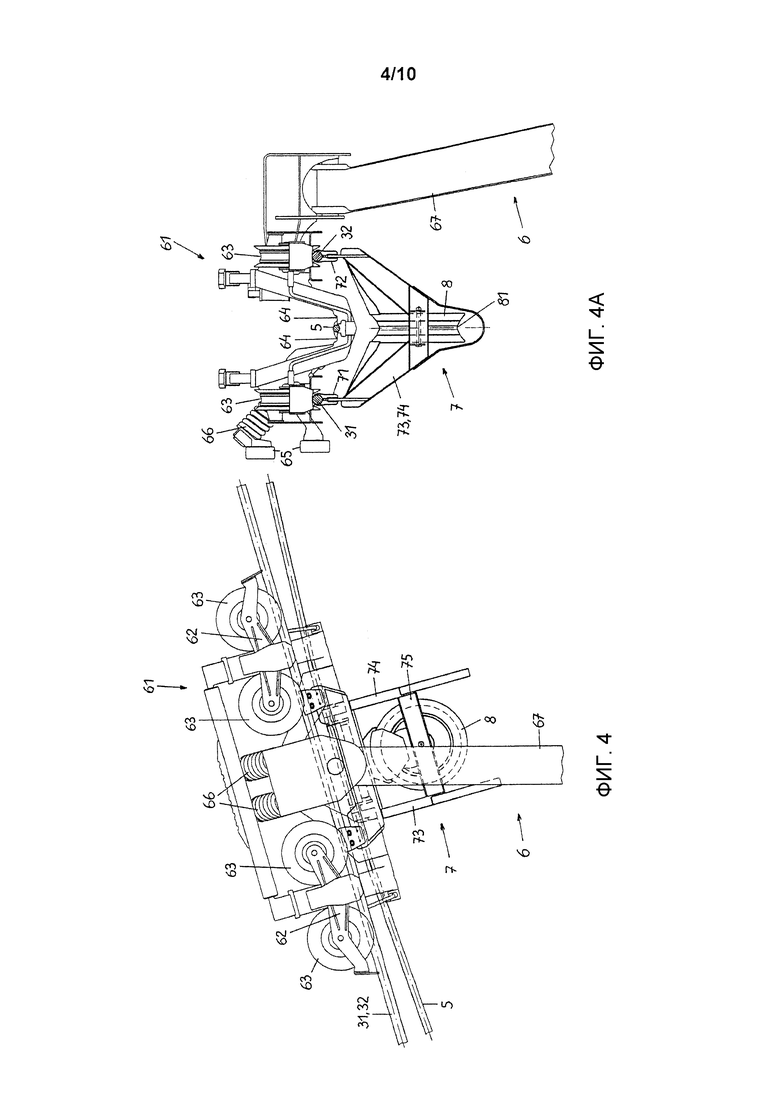
фиг. 4, фиг. 4A - канатная подвеска и механизм передвижения транспортного средства, на виде сбоку и в сечении по линии IVA-IVA фиг. 2 и в увеличенном масштабе;
фиг. 5 - фрагмент устройства канатной дороги в области опоры, включающий в себя транспортное средство, которое находится на этой опоре, на виде сбоку;
фиг. 5A - предлагаемый изобретением держатель ролика, включающий в себя опорный ролик тягового каната, в сечении по линии VA-VA фиг. 2 и в увеличенном масштабе;
фиг. 5B - держатель ролика и тяговый канат во втором положении транспортного средства в соответствии с фиг. 5, в сечении по линии VB-VB фиг. 5 и в увеличенном масштабе;
фиг. 6 - фрагмент устройства канатной дороги в третьем положении транспортного средства, при этом механизм передвижения находится над держателем ролика, на виде сбоку;
фиг. 6A - держатель ролика, механизм передвижения транспортного средства и положение тягового каната, в сечении по линии VIA-VIA фиг. 6;
фиг. 7 - этот фрагмент устройства канатной дороги в четвертом положении транспортного средства, при этом его механизм передвижения находится в области держателя ролика, после того как он переехал через него, на виде сбоку;
фиг. 7A - держатель ролика и тяговый канат, в сечении по линии VIIA-VIIA фиг. 7;
фиг. 8 - фрагмент устройства канатной дороги в пятом положении транспортного средства, механизм передвижения которого находится вне области держателя ролика, на виде сбоку;
фиг. 8A, фиг. 8B - первый вариант осуществления держателя ролика и положение тягового каната, в сечениях по линиям VIIIA-VIIIA и VIIIB-VIIIB фиг. 8;
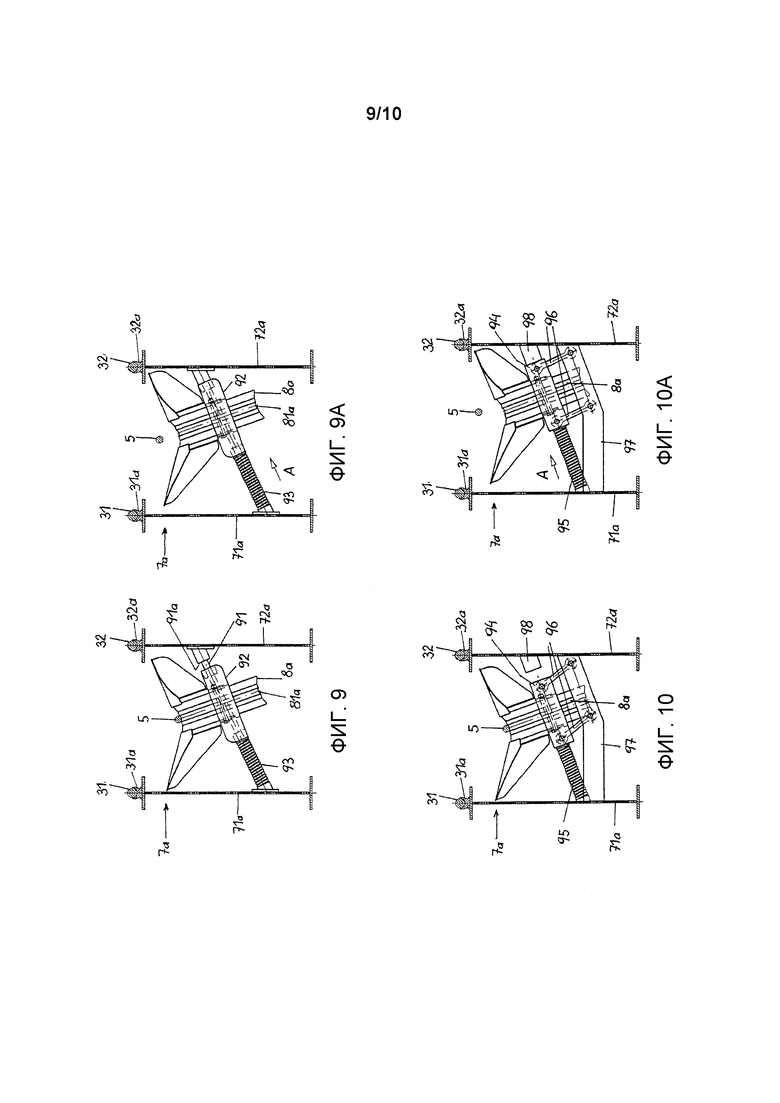
фиг. 9, фиг. 9A - второй вариант осуществления предлагаемого изобретением держателя ролика, в двух положениях, а также на виде с торца;
фиг. 10, фиг. 10A - третий вариант осуществления предлагаемого изобретением держателя ролика, в двух положениях, а также на виде с торца;
фиг. 11, фиг. 11A - четвертый вариант осуществления предлагаемого изобретением держателя ролика, в двух положениях, а также на виде с торца, и
фиг. 12, фиг. 12A - пятый вариант осуществления предлагаемого изобретением держателя ролика, в двух положениях, а также на виде с торца.
Изображенное на фиг. 1 и фиг. 1A устройство канатной дороги имеет первую конечную станцию 1 и вторую конечную станцию 2, между которыми находятся две пары сгруппированных друг с другом несущих канатов 3, а именно, соответственно сгруппированные друг с другом несущие канаты 31, 32, а также 33, 34. Несущие канаты 3 по ходу участка пути устройства канатной дороги проведены через опоры 4 и опираются на них. Кроме того, в устройстве канатной дороги находится замкнутый тяговый канат 5, который проведен в конечных станциях 1 и 2 через направляющие шкивы 11 и 21, при этом по меньшей мере один из этих направляющих шкивов 11 является приводным. По несущим канатам 31 и 32 посредством тягового каната 5 передвигаются сцепленные с ним транспортные средства 6, которые выполнены с кабиной 60 транспортного средства и механизмом 61 передвижения, от первой конечной станции 1 ко второй конечной станции 2. По несущим канатам 33 и 34 сцепленные с тяговым канатом транспортные средства 6 снова возвращаются в первую конечную станцию 1. В обеих конечных станциях 1 и 2 предусмотрены направляющие рельсы, по которым отцепленные от тягового каната 5 транспортные средства 6 продвигаются через конечные станции 1 и 2 и движутся от одной пары несущих канатов 3 на другую пару несущих канатов 3, после чего они снова прицепляются к замкнутому тяговому канату 5.
Как изображено на фиг. 1A, тяговые канаты 3 в области опоры 4 проходят криволинейно. В областях других опор тяговые канаты 3 тоже могут проходить криволинейно. Благодаря этому возможна адаптация хода устройства канатной дороги к топографическим условиям. В прямолинейных областях устройства канатной дороги два сгруппированных друг с другом несущих каната 31, 32 соединены канатной подвеской, на которую опираются опорные ролики тягового каната 5. В областях опор 4, в которых несущие канаты 31, 32 опираются на опорные стойки, относительно которых они обладают возможностью перемещения, также предусмотрены опорные ролики тягового каната 5, которые опираются на держатели роликов, закрепленные на сгруппированных друг с другом опорных устройствах несущих канатов 3.
На фиг. 2 изображен фрагмент устройства канатной дороги, при этом транспортное средство 6, механизм 61 передвижения которого посредством тягового каната 5 передвигается по несущим канатам 3, приближается к опоре 4.
На фиг. 3 и фиг. 3A изображена канатная подвеска 7 такого рода, которые находятся на прямолинейных участках пути устройства канатной дороги. Эта канатная подвеска 7 состоит из несущего кронштейна 70, который посредством двух пар зажимов 71, 72 прикреплен к несущим канатам 31, 32. От несущего кронштейна 70 вертикально выдаются вниз два приблизительно V-образно выполненных бугеля 73, 74, которые находятся на расстоянии друг от друга в продольном направлении несущих канатов 31, 32 и которые соединены друг с другом посредством опорной рамы 75. На опорной раме 75 опирается опорный ролик 8 тягового каната 5. Кроме того, по обеим сторонам от опорного ролика 8 находятся закрепленные на опорной раме 75 направляющие устройства 76 для каната. Когда в области канатной подвески 7 не находится транспортное средство 6, тяговый канат 5 находится в направляющей канавке 81 опорного ролика 8. В этой связи ссылаемся на фиг. 3A.
На фиг. 4 и фиг. 4A изображены механизм 61 передвижения сцепленного с тяговым канатом 5 транспортного средства 6 и прикрепленная к несущим канатам 31 и 32 канатная подвеска 7, через которую переезжает механизм 61 передвижения. Механизм 61 передвижения выполнен с двумя парами качающихся рычагов 62, на каждый их которых опирается пара ходовых колес 63, при этом две пары ходовых колес 63 обегают по несущему канату 31, а две другие пары рабочих колес 63 - по несущему канату 32. Ходовой механизм 61 транспортного средства 6 выполнен, кроме того, с двумя сгруппированными друг с другом зажимными колодками 64, которые посредством двух управляющих роликов 65 могут приводиться в действие против действия пружин 66 сжатия. Посредством зажимных колодок 64 механизм 61 передвижения может прикрепляться к тяговому канату 5.
К механизму 61 передвижения шарнирно присоединена несущая штанга 67, на нижнем конце которой закреплена кабина 60 транспортного средства.
Как видно из фиг. 4 и фиг. 4A, тяговый канат 5 при переезде механизма 61 передвижения через канатную подвеску 7 отрывается от опорного ролика 8. Как только механизм 61 передвижения удалился от канатной подвески 7, тяговый канат 5 снова опускается, благодаря чему он попадает в направляющую канавку 81 опорного ролика 8. Так как несущие канаты 3 между опорами 4 проходят прямолинейно, отклонение тягового каната 5 не происходит, так что он, после того как механизмы 61 передвижения удалились от канатных подвесок 7, снова попадает в направляющие канавки 81 опорных роликов 8.
На фиг. 5 изображен фрагмент устройства канатной дороги, при этом транспортное средство 6 находится на опоре 4.
Как было изложено выше, несущие канаты 3 могут на опорах 4 проходить криволинейно. При этом, однако, при отрыве тягового каната 5 от находящихся на опорах 4 опорных роликов происходит боковое отклонение тягового каната 5 относительно несущих канатов 3, так же, как и относительно опорных роликов, из-за чего при последующем опускании тягового каната 5 он не попадает в канавку для каната соответствующего опорного ролика.
На фиг. 5A изображен держатель 7a ролика такого рода, который находится на опоре 4 и с помощью которого достигается, что при опускании тягового каната 5 этот канат попадает непосредственно в канавку для каната соответствующего опорного ролика. В каркасе 4 закреплены два вертикально ориентированных I-образных несущих листа 71a, 72a, на верхних концах которых находятся изготовленные их бронзы опорные стойки 31a, 32a для несущих канатов 31, 32. Между вертикальными несущими листами 71a, 72a находится поворотный рычаг 73a, на который опирается опорный ролик 8a тягового каната 5. Поворотный рычаг 73a на одном своем конце опирается на вертикальный несущий лист 72a с возможностью поворота по высоте вокруг пальца 70a. На другом вертикальном несущем листе 71a предусмотрены два упора 76a, посредством которых ограничивается возможность поворота по высоте поворотного рычага 73a. Кроме того, к вертикальному несущему листу 71a и к поворотному рычагу 73a шарнирно присоединена пружина 77a растяжения, посредством которой поворотный рычаг 73a нагружен таким образом, что он поворачивается по высоте.
На участке пути тяговый канат 5 опирается на опорный ролик 8a, опирающийся на поворотный рычаг 73a, при этом он находится в направляющей канавке 81a. Пока тяговый канат 5 вследствие того, что механизм 61 передвижения транспортного средства 6 не находится в области держателя 7a ролика, не оторвался от опорного ролика 8a, пружина 77a растяжения вследствие нагрузки тяговым канатом 5 не действует. Как только, однако, механизм 61 передвижения приближается к держателю 7a ролика, тяговый канат 5 отрывается от опорного ролика 8a.
Ниже пояснены положения тягового каната 5 при различных положениях транспортного средства 6 относительно опирающегося на опору 4 опорного ролика 8a в том случае, когда несущие канаты 3 проходят криволинейно, как это изображено на фиг. 1A.
В соответствии с фиг. 2 транспортное средство 6 находится на таком расстоянии от тех опорных роликов 8a, которые опираются на опору 4, что тяговый канат 5 еще не оторван от этих опорных роликов 8a. Это положение видно из фиг. 5A.
В соответствии с фиг. 5 механизм 61 передвижения транспортного средства 6 находится на опоре 4 в области опорного ролика 8a. Как видно из фиг. 5B, при этом тяговый канат 5 оторван от опорного ролика 8a, благодаря чему поворотный рычаг 73a под действием пружины 76a растяжения переставлен в свое верхнее положение поворота.
Как видно из фиг. 6 и фиг. 6A, а также из фиг. 7 и фиг. 7A, это относится также к тому случаю, когда механизм 61 передвижения транспортного средства 6 находится над держателем 7a ролика и когда, хотя механизм 61 передвижения и переехал через держатель 7a ролика, механизм 61 передвижения еще находится в области этого держателя 7a ролика.
Так как несущие канаты 31, 32 в области опоры 4 проходят по изгибу, это приводит к тому, что тяговый канат 5 отклоняется в направлении центральной точки изгиба, а именно, что он смещается в боковом направлении относительно несущих канатов 3, а также относительно предусмотренного опорного ролика 8a. Из-за того что тяговый канат 5 отрывается от опорного ролика 8a, под действием пружины 77a растяжения поворотный рычаг 73a и вместе с ним опорный ролик 8a переставляются так, что та область опорного ролика 8a, которая обращена к тяговому канату 5, тоже переставляется в направлении центральной точки изгиба, вследствие чего направляющая канавка 81a опорного ролика 8a находится приблизительно под тяговым канатом 5.
На фиг. 8A изображен фрагмент устройства канатной дороги, при этом транспортное средство 6 удалилось от опорного ролика 8a настолько, что тяговый канат 5 снова опускается на опорный ролик 8a. При этом тяговый канат 5, хотя он вследствие криволинейного хода несущих канатов 3 был отклонен относительно них в боковом направлении, попадает непосредственно в направляющую канавку 81a опорного ролика 8a. В дальнейшем поворотный рычаг 73a вследствие его нагрузки тяговым канатом 5 против действия пружины 77a растяжения снова переставляется из верхнего положения поворота в нижнее положение поворота, как это изображено на фиг. 8B.
Благодаря возможности поворота опорных роликов 8a тягового каната 5 в областях криволинейного хода несущих канатов 3, таким образом, достигается, что в отношении бокового отклонения тягового каната 5 положение опорных роликов 8a адаптируется к положению тягового каната 5, благодаря чему обеспечивается, что тяговый канат 5 при его опускании попадает непосредственно в направляющие канавки 81a. Тем самым предотвращаются движения сдвиг тягового каната 5 относительно опорных роликов 8a и обусловленный ими повышенный износ опорных роликов 8a.
На фиг. 9 и фиг. 9A изображен второй вариант осуществления предлагаемого изобретением держателя 7a ролика, снабженного опорным роликом 8a, переставляемым относительно несущих канатов 31a, 32a в боковом направлении и по высоте. При этом два вертикальных несущих листа 71a и 72a соединены друг с другом прикрепленным к ним, наклонно ориентированным раскосом 91, причем на этом раскосе 91 находится втулка 92, которая под действием пружины 93 сжатия обладает возможностью смещения в направлении стрелки A, и на которую опирается опорный ролик 8. Для втулки 91 предусмотрен упор 91a.
Пока тяговый канат 5 проведен в направляющей канавке 81a, как это видно из фиг. 9, пружина 93 сжатия находится в своем натянутом положении. Как только тяговый канат 5 вследствие того, что механизм 61 передвижения переезжает через опорный ролик 8a, приподнимается, втулка 92 под действием пружины 93 сжатия смещается в направлении стрелки A, как это видно из фиг. 9A. При этом опорный ролик 8a следует боковому отклонению тягового каната 5. Как только тяговый канат 5 опускается, он попадает непосредственно в направляющую канавку 81a. В дальнейшем втулка 92 вследствие оказываемой тяговым канатом 5 нагрузки переставляется обратно в направлении стрелки A, вследствие чего пружина 93 сжатия снова натягивается.
На фиг. 10 и фиг. 10A изображен третий вариант осуществления предлагаемого изобретением держателя 7a ролика. При этом на двух вертикальных несущих листах 71a, 72a закреплен раскос 97, к которому шарнирно присоединены два направляющих рычага 96. На эти два направляющих рычага 96 опирается держатель 94, на который опирается опорный ролик 8a и который находится под действием пружины 95 сжатия. Кроме того, на вертикальном несущем листе 72a предусмотрен упор 98, с которым держатель 94 соприкасается при его перестановке в боковом направлении, вследствие чего его движение перестановки ограничивается.
На фиг. 11 и фиг. 11A изображен четвертый вариант осуществления предлагаемого изобретением держателя 7a ролика. При этом опорный ролик 8a опирается на поворотный рычаг 101, который опирается на неподвижный палец 102. На одном из двух концов поворотного рычага 101 предусмотрены упоры 103. На другом его конце на поворотном рычаге 101 закреплен груз 104.
Пока тяговый канат 5 находится на опорном ролике 8a, поворотный рычаг 101 против действия груза 104 находится в своем нижнем положении поворота, которое изображено на фиг. 11A.
Как только тяговый канат 5 отрывается от опорного ролика 8a, поворотный рычаг 101 под действием груза 104 переставляется в свое верхнее положение поворота, вследствие чего опорный ролик 8a несколько приподнимается и смещается в боковом направлении, как это изображено на фиг. 11A.
На фиг. 12 и фиг. 12A изображен пятый вариант осуществления предлагаемого изобретением держателя 7a ролика, который отличается от четвертого варианта осуществления в соответствии с фиг. 11 и фиг. 11A тем, что переставляющая сила для перестановки поворотного рычага 101 создается не грузом, а, в отличие от этого, электродвигателем 105.
Принцип осуществления возможности перестановки опорного ролика 8a в вариантах осуществления держателя ролика в соответствии с фиг. 10 и фиг. 10A, фиг. 11 и фиг. 11A или, соответственно, фиг. 12 и фиг. 12A соответствует тому принципу осуществления, который пояснен выше на примере осуществления в соответствии с фиг. 9 и фиг. 9A.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ЛЮДЕЙ | 2014 |
|
RU2644818C2 |
| ТРАНСПОРТНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 1994 |
|
RU2146626C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2014 |
|
RU2653648C1 |
| Канатная дорога | 1991 |
|
SU1796512A1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2011 |
|
RU2518544C2 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО С ТРАНСПОРТИРУЮЩЕЙ ЛЕНТОЙ | 2005 |
|
RU2381977C2 |
| Канатный зажим для проволочно-канатной дороги | 1926 |
|
SU51320A1 |
| Лесозаготовительный агрегат | 1983 |
|
SU1115949A2 |
| Тормозное устройство для транспортного средства подвесной канатной дороги | 1974 |
|
SU633462A3 |
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ РОЛИКОВЫХ БАТАРЕЙ | 2014 |
|
RU2628838C2 |







Изобретение касается устройства канатной дороги для перемещения людей или грузов. Устройство канатной дороги для перемещения людей или, соответственно, грузов имеет две пары несущих канатов (31, 32), распространяющихся между двумя конечными станциями, в частности нижней конечной станцией и верхней конечной станцией, вдоль которых посредством по меньшей мере одного тягового каната (5) могут передвигаться транспортные средства. Несущие канаты (3) в области по меньшей мере одной опоры проходят криволинейно на виде сверху. Тяговый канат (5) в области указанной по меньшей мере одной опоры (4) проведен через опорные ролики (8a). При этом по меньшей мере некоторые из находящихся в области указанной по меньшей мере одной опоры (4) опорных роликов (8a) указанного по меньшей мере одного тягового каната (5) могут переставляться по своему положению относительно обоих несущих канатов (3) в вертикальном и горизонтальном направлении в положение приблизительно под тяговым канатом (5). В результате повышается износостойкость элементов канатной дороги, в частности опорных роликов. 10 з.п. ф-лы, 25 ил.
1. Устройство канатной дороги для перемещения людей или, соответственно, грузов, имеющее две пары несущих канатов (3), распространяющихся между двумя конечными станциями (1, 2), в частности нижней конечной станцией и верхней конечной станцией, вдоль которых посредством по меньшей мере одного тягового каната (5) имеют возможность перемещения транспортные средства (6), причем несущие канаты (3) в области по меньшей мере одной опоры (4) проходят криволинейно на виде сверху, и тяговый канат (5) в области указанной по меньшей мере одной опоры (4) проведен через опорные ролики (8a), отличающееся тем, что по меньшей мере некоторые из находящихся в области указанной по меньшей мере одной опоры (4) опорных роликов (8a) для указанного по меньшей мере одного тягового каната (5) выполнены с возможностью переставления относительно обоих несущих канатов (3) в вертикальном и горизонтальном направлении в положение приблизительно под тяговым канатом (5).
2. Устройство канатной дороги по п.1, отличающееся тем, что опорные ролики (8a) выполнены с возможностью переставления под действием переставляющей силы.
3. Устройство канатной дороги по одному из пп.1 или 2, отличающееся тем, что соответствующий опорный ролик (8a) указанного по меньшей мере одного тягового каната (5) опирается на поворотный рычаг (73a), который выполнен с возможностью поворота по высоте вокруг, по меньшей мере, приблизительно горизонтальной оси под действием переставляющего устройства, в частности переставляющей пружины (77a).
4. Устройство канатной дороги по п.3, отличающееся тем, что несущие канаты (3, 3a) в области указанной по меньшей мере одной опоры (4) опираются на держатели, в частности несущие листы (71a, 72a), на которые с возможностью поворота по высоте опирается поворотный рычаг (73a), на который опирается опорный ролик (8a) указанного по меньшей мере одного тягового каната (5).
5. Устройство канатной дороги по п.4, отличающееся тем, что на опоре (4) закреплены держатели, в частности несущие листы (71a, 72a), на которых находятся опорные стойки (31a, 32a) несущих канатов (31, 32), при этом поворотный рычаг (73a) шарнирно соединен с помощью опирающегося на него опорного ролика (8a) с одним из двух держателей, а другой из двух держателей выполнен с упорами (76a) для поворотного рычага.
6. Устройство канатной дороги по п.1, отличающееся тем, что оба несущих каната (31, 32) в области указанной по меньшей мере одной опоры (4) опираются каждый на один держатель, в частности на несущие листы (71a, 72a), при этом держатели соединены друг с другом наклонно ориентированным соединительным раскосом (91), причем на соединительный раскос (91) с возможностью смещения опирается находящаяся под действием возвратной силы, в частности пружины (93) сжатия, втулка (92), на которую опирается опорный ролик (8a).
7. Устройство канатной дороги по п.6, отличающееся тем, что для обладающей возможностью смещения втулки (91) предусмотрен упор (91a).
8. Устройство канатной дороги по п.1, отличающееся тем, что оба несущих каната (31, 32) в области указанной по меньшей мере одной опоры (4) опираются каждый на один держатель, в частности на несущие листы (71a, 72a), причем два держателя соединены друг с другом соединительным раскосом (97), причем на соединительный раскос (97) опираются два направляющих рычага (96), к которым шарнирно присоединен держатель (94) опорного ролика (8a), причем держатель (94) находится под действием переставляющей силы, в частности пружины (95) сжатия, посредством которой он имеет возможность переставляться в боковом направлении относительно держателей несущих канатов (31, 32), в частности несущих листов (71a, 72a).
9. Устройство канатной дороги по п.1, отличающееся тем, что один из двух держателей, в частности несущих листов (71a, 72a), выполнен с упором (98).
10. Устройство канатной дороги по п.1, отличающееся тем, что в области указанной по меньшей мере одной опоры (4) предусмотрены держатели, в частности вертикальные несущие листы (71a, 72a), между которыми на неподвижный палец (102) с возможностью поворота опирается поворотный рычаг (101), на который опирается опорный ролик (8a), причем этот поворотный рычаг (101) под действием переставляющей силы, в частности груза (104) или, соответственно, электродвигателя (105), имеет возможность переставляться из нижнего положения поворота в верхнее положение поворота.
11. Устройство канатной дороги по одному из пп.5 или 10, отличающееся тем, что поворотный рычаг (109) является переставляемым по высоте между двумя упорами (103).
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ получения этоксифенилнигроантраниловой кислоты | 1934 |
|
SU39112A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Станок для расчесывания щетины | 1926 |
|
SU5901A1 |

