Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и системе для управления временем переключения устройства, включающего в себя магнитную цепь и по меньшей мере одну проводящую обмотку.
Уровень техники
Как известно, когда в силовой трансформатор в сети передачи или распределения энергии повторно подают питание, кратковременно могут возникать чрезмерные токи вследствие разности между остаточными значениями потока в каждой части магнитной цепи и потоками, генерируемыми напряжениями, прикладываемыми к выводам каждой обмотки.
Такие избыточные токи, которые богаты гармониками, в некоторых конфигурациях сети могут представлять значения намного более высокие, чем допустимые уровни трансформатора.
Кроме того, такие чрезмерные токи могут формировать основные электродвижущие силы в обмотках, которые приводят к ускорению деградации трансформатора (деформации, смещению обмоток).
Эти проблемы, связанные с чрезмерными токами и чрезмерными напряжениями, также могут наблюдаться в других электрических устройствах, включающих в себя магнитную цепь и электрические обмотки (запуск электрических машин).
В качестве иллюстрации, ниже рассмотрен случай однофазного трансформатора.
Перед подачей питания поток Ф в ферромагнитном материале, из которого сформирована магнитная цепь, имеет значение Фr, называемое остаточным потоком.
Остаточный поток зависит от условий отключения энергии трансформатора, которые обычно являются неуправляемыми, от типа магнитной цепи (например, ее структуры) и от собственных параметров составляющего ее материала.
Остаточный поток, вероятно, развивается с течением времени, в частности, за счет внешних стрессов отключаемого трансформатора (например, под влиянием электрических устройств, находящихся в непосредственной близости к трансформатору).
Во время отключения тока в момент времени t=0, поскольку приложенное напряжение представляет собой переменное напряжение, напряжение на выводах индуктивной катушки может быть записано как
где
V представляет собой среднеквадратичное значение приложенного напряжения;
α представляет собой угол, представляющий фазу в момент времени включения питания.
V0 поэтому имеет значение, которое зависит исключительно от α.
Для данного значения существует соответствующий поток Ф0, возникающий внутри магнитной цепи.
Рабочее уравнение поэтому может быть представлено следующим образом:

где
ω представляет собой импульс напряжения;
R представляет собой общее сопротивление электрической цепи, включая в себя обмотку катушки индуктивности;
n представляет собой количество витков обмотки катушки индуктивности;
Ф представляет собой средний поток в магнитной цепи.
Известно, что выражение для потока, с некоторыми аппроксимациями, может быть представлено следующим образом:

где
τ=L/R, и L представляет собой индуктивность индуктивной обмотки.
Затем возможно определить ток i(t) как функцию кривой B(H) магнитного материала цепи.
Оптимальную подачу питания в трансформатор выполняют под заданным углом α таким образом, чтобы переходный поток (и, следовательно, переходный ток), то есть максимальный ток, достигаемый после подачи питания, был как можно более низким, для защиты трансформатора.
Например, если Фr=0 и α=0 (то есть подача питания при максимальном напряжении и без остаточного потока), тогда

что означает, что отсутствует скачок тока. Подача питания поэтому является оптимальной.
С другой стороны, если Фr=Фr max и α=3π/2 (то есть подача энергии при 0 напряжении и максимальном остаточном потоке), тогда

В этом случае поток достигает очень высоких значений, приводящих к большим скачкам тока, или приводит к основным временным гармоническим чрезмерным напряжениям в сети.
Эти два примера представляют преимущество знания значения остаточного потока.
Одно известное решение для оценки остаточного потока основано на том факте, что напряжение является однородным для вывода потока и поэтому состоит в оценке остаточного потока путем интегрирования напряжения на выводах трансформатора перед повторной подачей в него питания.
Упомянутый способ описан, например, в документе US 2010/0013470.
Документы DE 19641116 и DE 3614057 также раскрывают способы, используя данные о состоянии устройства перед повторной подачей в него питания, для оценки оптимального времени подачи питания.
Однако упомянутый опосредованный способ определения остаточного потока может в некоторых конфигурациях электрической сети, подающей питание в трансформатор, оказаться неточным и ненадежным из-за явлений, которые могут возникать при изменении магнитного состояние магнитной цепи, и неточностей при измерении напряжения, которые представляют собой входные данные для расчета потока - что делает этот расчет неточным (смещение, дрейф, низкий уровень напряжения, зашумленный сигнал).
Кроме того, может пройти много времени между отключением питания и подачей питания в трансформатор, что требует сохранения данных в течение длительного периода и регулярных измерений потока для проверки его изменения.
Задача изобретения поэтому состоит в том, чтобы обеспечить более точное, простое и надежное управление временем переключения трансформатора или любого устройства, содержащего магнитную цепь и одну или больше проводящих обмоток, через которые протекает ток во время работы, такого как, например, вращающаяся машина.
Дополнительная задача изобретения состоит в том, чтобы обеспечить простой и надежный способ для подачи энергии в трансформатор при оптимальных условиях.
Дополнительная задача изобретения состоит в том, чтобы разработать систему для определения остаточного потока в магнитной цепи, которая обеспечивает лучшую характеристику и является более точной, чем существующие системы, и может быть легко воплощена.
Сущность изобретения
В соответствии с изобретением, предложен способ для управления временем переключения устройства, содержащего магнитную цепь и, по меньшей мере, одну проводящую обмотку, отличающийся тем, что он содержит следующие этапы:
- получают, по меньшей мере, один результат измерения магнитного поля, генерируемого остаточным потоком в упомянутой магнитной цепи, с помощью, по меньшей мере, одного датчика магнитного поля, установленного в непосредственной близости к магнитной цепи;
- обрабатывают полученные результаты измерений магнитного поля для того, чтобы вывести из них остаточный поток в магнитной цепи;
- по остаточному потоку определяют оптимальное время переключения.
Все эти этапы выполняют после отключения питания устройства, и они не требуют какого-либо знания или запоминания состояния устройства во время его отключения.
Упомянутый способ, предпочтительно, содержит предварительный этап калибровки датчика, в результате которого определяют функцию между значением магнитного поля, измеренным с помощью датчика, и значением остаточного потока в магнитной цепи.
С этой целью, в соответствии с первым вариантом осуществления, по меньшей мере, одну пару датчиков помещают на магнитной цепи симметрично относительно упомянутой магнитной цепи, что позволяет устранить путем вычитания возмущающий компонент поля из измерений, получаемых с помощью датчиков, и упомянутую функцию передачи определяют в отношении значений магнитного поля, измеряемых упомянутой парой датчиков, и в отношении относительной проницаемости составляющего материала магнитной цепи.
В соответствии с одним вариантом осуществления калибровки, по меньшей мере, одну пару датчиков помещают в непосредственной близости к магнитной цепи симметрично относительно упомянутой магнитной цепи, что позволяет устранить посредством вычитания возмущающий компонент поля из измерений, получаемых с помощью датчиков; калибровка датчика затем содержит этап определения интеграла в течение одного текущего периода напряжения на выводах обмотки, когда ток пересекает ноль, этап определения индукции, когда ток пересекает ноль, используя кривую гистерезиса индукции в магнитной цепи, как функцию интенсивности тока, циркулирующего в обмотке перед отключением питания, и определения функции передачи на упомянутых этапах.
В соответствии с одним конкретным вариантом осуществления изобретения, упомянутое устройство содержит кожух, окружающий магнитную цепь и обмотку, и, по меньшей мере, один датчик магнитного поля затем помещают на внешней поверхности упомянутого кожуха.
Изобретение также относится к применению описанного способа для подачи питания в трансформатор, в результате чего в трансформатор подают питание в оптимальный момент времени, определенный с помощью упомянутого способа для каждой из фаз ввода мощности.
В соответствии с одним конкретным вариантом осуществления изобретения, в котором упомянутое устройство содержит несколько входных фаз, описанный выше способ воплощен для определения значения остаточного потока в магнитной цепи для каждой из фаз упомянутого устройства с отключенным питанием, и оптимальный момент времени подачи питания рассчитывают для фазы, имеющей наибольший остаточный поток.
Изобретение также относится к применению упомянутого способа для подачи питания в трехфазный трансформатор, в результате чего входную фазу, которая имеет наибольший остаточный поток, включают в оптимальный момент времени, определенный с помощью упомянутого способа для упомянутой входной фазы, после чего одновременно включают другие входные фазы в момент времени, когда напряжение, индуцируемое в результате подачи питания в первую фазу, пересекает нулевое значение.
Дополнительная цель изобретения относится к системе для управления временем переключения устройства, включающего в себя магнитную цепь и, по меньшей мере, одну проводящую обмотку.
Эта система примечательна тем, что она содержит:
- по меньшей мере, один датчик магнитного поля;
- систему для получения результатов измерений магнитного поля, выполняемых упомянутым датчиком;
- систему для обработки данных, получаемых системой получения, для расчета остаточного потока в магнитной цепи и для определения из остаточного потока оптимального момента времени переключения устройства.
И, наконец, изобретение также относится к трансформатору, содержащему магнитную цепь, по меньшей мере, одну первичную проводящую обмотку и одну вторичную проводящую обмотку, упомянутая магнитная цепь и упомянутые проводящие обмотки окружены кожухом, упомянутый трансформатор предусмотрен на магнитной цепи и/или на или в непосредственной близости к внешней поверхности кожуха, при этом, по меньшей мере, датчик магнитного поля принадлежит системе, такой как описана выше.
Краткое описание чертежей
Другие характеристики и преимущества изобретения будут понятны из следующего подробного описания изобретения со ссылкой на приложенные чертежи, на которых:
- на фиг.1 показан схематический обзор однофазного преобразователя и датчиков магнитного поля;
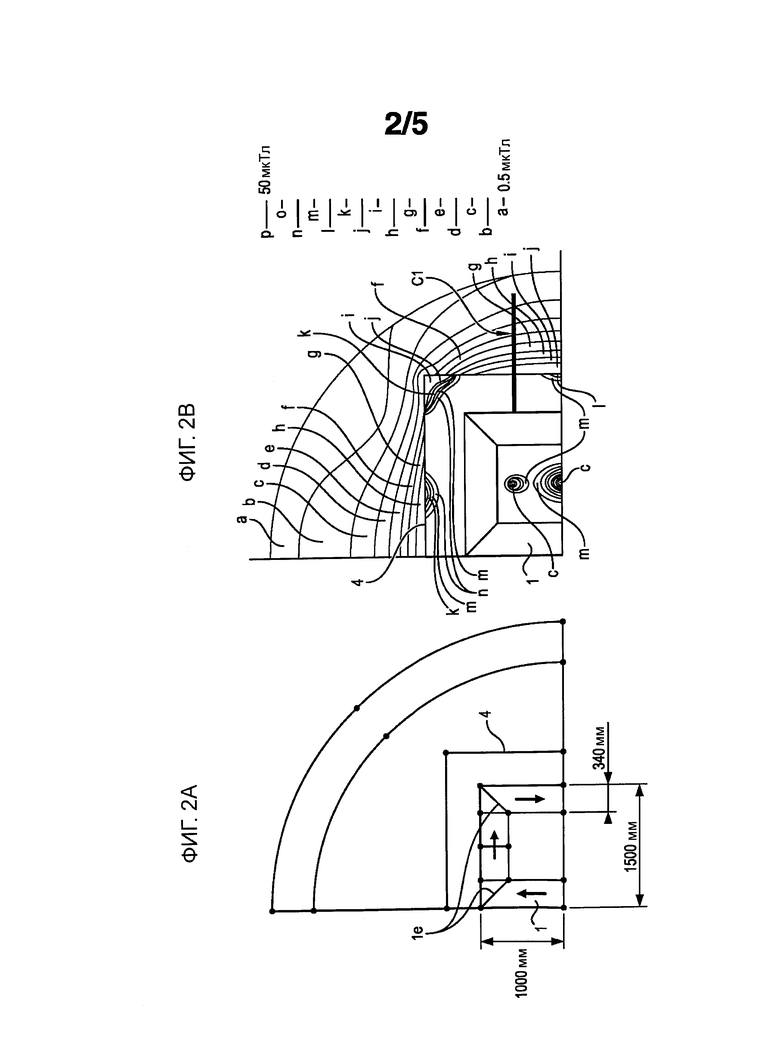
- на фиг.2A показана цифровая модель участка магнитной цепи и кожуха, окружающего упомянутую цепь;
- на фиг.2B показаны разные значения магнитной индукции, генерируемой остаточным потоком в магнитной цепи, показанной на фиг.2A, вне кожуха;
- на фиг.3 показана индукция, измеренная на пути, перпендикулярном одной поверхности магнитной цепи на фигуре 2A, с и без кожуха;
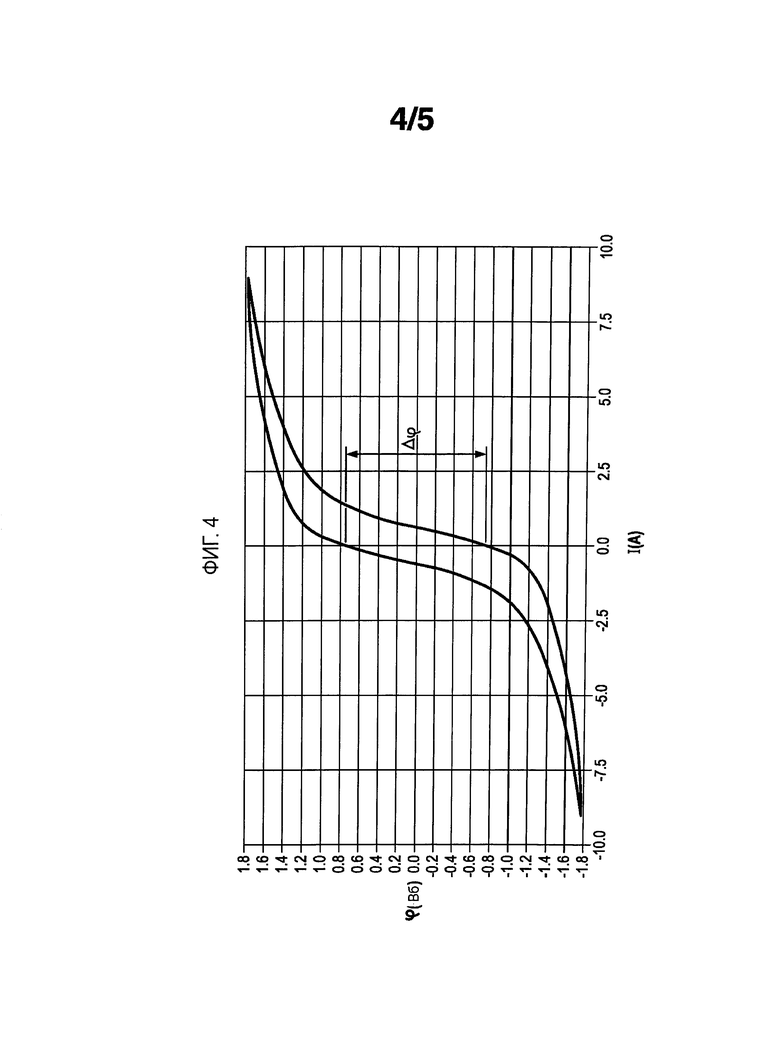
- на фиг.4 показана кривая магнитного потока в магнитной цепи как функция интенсивности тока, циркулирующего в обмотке перед выключением;
- на фиг.5 показана кривая индукции в магнитной цепи как функция интенсивности тока, циркулирующего в обмотке перед выключением.
Подробное описание изобретения
Устройство, в котором применяется данный способ, в общем, относится к магнитной цеп, сформированной из ферромагнитного материала, и одной или больше проводящих обмоток, которые могут окружать или которые могут не окружать магнитную цепь и через которые может протекать ток.
Кроме того, магнитная цепь и проводящая обмотка (обмотки) могут быть помещены внутрь кожуха, который обычно представляет собой кожух в виде стальной пластины.
Такой кожух, в частности, предназначен для содержания масла, требуемого для охлаждения трансформатора.
Материал кожуха не формирует барьер для утечки поля из магнитной цепи таким образом, что становится возможным измерять магнитный поток на внешней поверхности кожуха.
В трансформаторе одна из обмоток соединена с источником питания переменного напряжения, и одна или больше дополнительных обмоток соединены с электрической цепью, в которую требуется подавать энергию.
В этом неограничительном примере представлено описание однофазного трансформатора, однако способ, в принципе, применяется аналогично к любому другому устройству, такому как трехфазный трансформатор, вращающаяся машина и т.д.
Способ определения остаточного потока
В общем, способ основан на определении остаточного потока в магнитной цепи после отключения устройства путем выполнения одного или больше измерений магнитного поля, генерируемого этим остаточным потоком в непосредственной близости к магнитной цепи.
Знание остаточного потока затем позволяет определять оптимальное время переключения.
На фиг.1 схематично иллюстрируется однофазный трансформатор.
Этот трансформатор содержит магнитную цепь 1, первичную проводящую обмотку 2, соединенную с источником питания переменного тока, и вторичную проводящую обмотку 3, соединенную с электрической цепью, в которую требуется подавать напряжение.
Магнитная цепь содержит сердечник из ферромагнитного материала, который на этом чертеже 1 показан как однородный.
Однако обычно магнитная цепь может иметь многослойную структуру, сформированную из множества параллельных листов, изолированных друг от друга.
В соответствии с одним конкретным вариантом осуществления, магнитная цепь 1 и первичная и вторичная обмотки 2 и 3 окружены кожухом 4 в форме кожуха из стальной пластины, которая представлена здесь частично.
Когда питание трансформатора отключают, поток, циркулирующий в магнитной цепи, фиксируется после переходного состояния и приводит к формированию остаточного потока Фr в магнитной цепи 1.
Для определения значения остаточного потока один или больше датчиков магнитного поля помещают в непосредственной близости к магнитной цепи 1.
Под ″непосредственной близостью″ в настоящем тексте понимают, что датчик помещен либо на самой магнитной цепи, или на достаточно близком расстоянии таким образом, что измерение магнитного поля обеспечивает точное определение магнитного потока в магнитной цепи.
В качестве примера, здесь рассматривается, что датчик находится в непосредственной близости к магнитной цепи, если он размещен на расстоянии от нее, которое меньше, чем самая длинная сторона упомянутой магнитной цепи.
Существуют два основных источника магнитного поля в отключенном трансформаторе: во-первых, остаточный поток и, во-вторых, возмущающее поле (в основном, возникающее из-за магнитного поля Земли).
Если другие поля, кроме магнитного поля Земли, формируют возмущающее поле, тогда система может использоваться для устранения этих возмущений. Способы обработки сигналов известны тем, что они отделяют разные источники магнитного поля.
Когда магнитное поле измеряют в непосредственной близости к магнитной цепи, измеренное значение представляет собой результат этих двух источников.
Если кожух окружает магнитную цепь, возможно поместить датчик (датчики) на внешней или внутренней поверхности кожуха или в непосредственной близости к ней, причем этот кожух не устраняет ток утечки.
Неожиданно было показано, что индукция, измеренная снаружи кожуха, достаточна для обеспечения надежного измерения магнитного поля, генерируемого остаточным потоком.
На фиг.2A-3 показаны результаты моделирования, выполненного на модели участка цепи и для кожуха, окружающего упомянутый участок.
На фиг.2A иллюстрируется цифровая модель участка магнитной цепи 1 и кожуха 4, окружающего упомянутую цепь.
Хотя моделировали только одну четверть цепи, используя в данном случае программное обеспечение Flux 2D, цифровое моделирование относится ко всему устройству.
Магнитную цепь моделировали в форме набора магнитов, каждый из которых имел определенное направление намагничивания.
Магниты имели относительную проницаемость µr1=5000 и остаточную индукцию Br=1 Тл.
Варианты осуществления магнитной цепи моделировали по воздушным зазорам 1е размером 0,5 мм, размещенным в углах магнитной цепи.
Стрелки представляют ориентацию линий магнитного поля в магнитной цепи.
Металлический кожух 4 имеет относительную проницаемость µr4=100 и толщину 1 см.
На фиг.2B иллюстрируются разные значения магнитной индукции, генерируемые остаточным потоком в магнитной цепи 1, моделируемой таким образом, за пределами кожуха 4.
Шкала от a до p соответствует зонам индукции, имеющим значение от 0,5 мкТл до 50 мкТл.
Как можно видеть, магнитная индукция в непосредственной близости к кожуху имеет достаточно высокие значения для обеспечения полезных измерений с помощью датчика магнитного поля, помещенного в этой зоне.
Это можно видеть на фиг.3, на которой иллюстрируется магнитная индукция B, измеренная на пути C1 (схематично показанном на фиг.2B), перпендикулярно одной стороне магнитной цепи 1 без кожуха (пунктирная линия) и с кожухом (кривая в виде сплошной линии), как функция расстояния d от магнитной цепи.
Поэтому в присутствии кожуха индукция, измеряемая непосредственно снаружи кожуха, составляет 20 мкТл, в то врем как индукция, измеренная в той же точке без кожуха, составляет 34 мкТл.
В результате, даже если кожух не изменяет значение магнитного поля, генерируемого остаточным потоком, существует след снаружи кожуха, представляющий это магнитное поле, который может быть измерен и скоррелирован с реальным значением посредством соответствующей калибровки.
Его можно учитывать, благодаря тому факту, что магнитные поля, генерируемые устройством, в соответствии с изобретением, являются достаточно большими для генерирования измеримого следа снаружи кожуха.
В случае моделирования, описанного здесь, остаточная индукция 1 Тл магнитной цепи представлена индукцией, измеренной снаружи кожуха 20 мкТл.
Остаточная индукция порядка 1 мТл поэтому будет представлена индукцией снаружи кожуха порядка нескольких нТл, что больше, чем точность датчиков, присутствующих в настоящее время на рынке, и которая поэтому является измеримой величиной. Измерение с использованием датчика, помещенного снаружи кожуха, поэтому может быть репрезентативным для остаточной индукции при условии, что можно игнорировать внешние помехи.
Как показано на фиг.1, три датчика 10a, 10b, 10c магнитного поля были помещены на трех внешних сторонах кожуха 4.
Предпочтительное расположение и условия ориентации для датчиков дополнительно представлены ниже.
Предпочтительно, датчик (датчики) размещают в медианной плоскости магнитной цепи так, чтобы они имели наилучшую возможную чувствительность для линий магнитного поля вокруг цепи.
Для их установки можно использовать любой соответствующий способ крепления (клей и т.д.) для закрепления на магнитной цепи и/или кожухе, даже на держателе, отдельном от магнитной цепи или кожуха.
Благодаря использованию датчика (датчиков) одно или больше значений магнитного поля получают в непосредственной близости к магнитной цепи.
Упомянутое значение или значения затем обрабатывают для вывода значения остаточного потока в магнитной цепи.
Как можно видеть ниже, перед калибровкой каждого датчика обеспечивается возможность определения функции передачи между значением магнитного поля, измеренным этим датчиком, и значением остаточного потока.
Управление временем переключения
Знание остаточного потока затем позволяет определять оптимальное время переключения.
Возвращаясь к примеру однофазного трансформатора, если значение Фr известно, оптимальный угол α подачи питания для сведения к минимуму скачка тока выводят из представленных выше уравнений, используя формулу
то есть

Преимущество этого способа состоит в том, что в нем не требуются знания условий, в соответствии с которыми устройство было отключено, что исключает необходимость архивации рабочих условий этого устройства.
Кроме того, данный способ является более прямым, чем способы интегрирования предшествующего уровня техники, и поэтому является более точным, поскольку он позволяет преодолеть явления, которые могут возникнуть и которые приводят к изменению магнитного состояния магнитной цепи, и также исключают неточности результатов измерения напряжения, используемых, как входные данные, для расчета потока в способах предшествующего уровня техники.
Если устройство представляет собой трехфазный трансформатор, каждые три столбика остаточного потока измеряют в каждом столбике путем помещения, по меньшей мере, одного датчик магнитного поля на магнитной цепи каждого из столбиков.
Для подачи питания в трансформатор включают питание в первой фазе, для которой остаточный поток является наибольшим, при этом время переключения определяют так, чтобы свести к минимуму скачок тока.
Включение питания в первой фазе генерирует напряжение, индуцируемое в двух других фазах, причем эти фазы сдвинуты на 180° относительно первой фазы.
После времени, соответствующего нескольким полупериодам упомянутого индуцированного напряжения (предназначено для уменьшения асимметрии магнитного потока в двух фазах, в которые должно быть подано питание), в эти две фазы одновременно подают питание, в момент времени, соответствующий времени пересечения нуля индуцированного напряжения.
Способ подачи питания описан в статье автора A. Mercier et al., ″Transformer Controlled Switching taking into account the Core Residual Flux - A real case study″, CIGRE 13-201, 2002, ссылка на которую может быть сделана.
Очевидно, что любая другая стратегия переключения может быть выбрана без выхода за пределы объема настоящего изобретения.
Калибровка датчика
Измерения, выполненные с помощью датчиков, позволяют выполнить качественную оценку остаточного потока, а именно его наличие и его направление.
Для количественной оценки, то есть для вывода значения остаточного потока в магнитной цепи по измеренным значениям магнитного поля, необходимо заранее калибровать датчик для определения функции передачи между измеренным магнитным полем и соответствующим остаточным потоком.
Для иллюстрации примера ниже описан вариант использования двух датчиков, помещенных рядом с однофазным трансформатором, в котором не предусмотрен кожух.
Как можно видеть ниже, преимущество использования двух датчиков, расположенных симметрично, состоит в том, что посредством вычитания возможно устранить компонент возмущающего поля из измерений, полученных с помощью упомянутых датчиков.
При этом делается различие между случаем, в котором датчики располагаются непосредственно на магнитной цепи, и случаем, в котором датчики помещают на некотором расстоянии от магнитной цепи.
Случай 1: датчики на магнитной цепи
В этом случае тангенциальный компонент магнитного поля измеряют в основном направлении индукции в магнитной цепи.
Датчик поэтому должен быть ориентирован относительно магнитной цепи таким образом, чтобы он мог измерять этот компонент.
Этот случай также является действительным, когда датчик помещают достаточно близко к магнитной цепи так, чтобы стало возможным измерять тангенциальный компонент магнитного поля на границе перехода между цепью/воздухом.
Индукция, измеряемая датчиком, определена следующей формулой:
Bsensor=A1·B0+A2·Ba
где
A1 представляет собой магнитуду, зависящую как от положения датчика, так и от индукции в магнитной цепи;
B0 представляет собой компонент возмущающего поля (в основном, магнитного поля Земли) в направлении тангенциальной индукции;
Ва представляет собой основной компонент индукции в магнитной цепи, тангенциальный границе перехода между воздухом и магнитной цепью;
A2=1/µa, путем поддержания тангенциального магнитного поля на границе цепь/воздух (теорема Ампера);
µa представляет собой относительную проницаемость составляющего материала магнитной цепи.
Если два датчика расположены симметрично на магнитной цепи, компонент возмущающего поля модифицируется так же, как и в присутствии магнитной цепи.
Результаты измерения индукции, выполняемые двумя датчиками, поэтому могут быть записаны следующим образом:
Bsensor1=A1·B0+A2·Ba
Bsensor2=A1·B0-A2·Ba
Вычитание результатов измерений, полученных двумя датчиками, позволяет устранить компонент возмущающего поля, и таким образом получают:
Bsensor1-Bsensor2=2A2·Ba
Значение Ba может поэтому быть выведено из результатов измерений, полученных двумя датчиками, и по относительной проницаемости материала магнитной цепи, которая известна.
Затем возможно определить значение потока, циркулирующего в магнитной цепи, который задан уравнением
ϕa=n·Ba·Sa,
где n представляет собой количество витков индуктивной обмотки, и Sa представляет собой поперечное сечение магнитной цепи.
Случай 2: датчики находятся на расстоянии от магнитной цепи
Когда датчики не находятся на магнитной цепи, индукция, измеряемая этими датчиками, выражается как
Bsensor=A1·B0+A2·Ba,
где магнитуды A1, B0 и Ва имеют те же определения, как и в предыдущем случае.
С другой стороны, коэффициент A2 должен быть определен на следующих этапах:
1) При измерении первичного или вторичного напряжения (обозначено, как V) могут быть измерены магнитная индукция (обозначена, как B), измеряемая датчиком, и ток в первичной обмотке (обозначенный, как I), когда в трансформатор (без нагрузки) подают переменное напряжение.
2) Вычерчивают кривую φ(I), где φ определено как интеграл напряжения V, как функция времени в течение периода тока (то есть 20 мс при 50 Гц). Такая кривая показана на фиг.4. Ее получают, вначале, путем расчета, в течение периода тока, интеграла φ напряжения, как функции времени (которая имеет синусоидальный внешний вид, со сдвигом фазы 90° относительно напряжения V), и во-вторых, путем измерения вариации тока I в течение того же периода, и по этим двум последовательностям данных путем вычерчивания кривой гистерезиса φ(I). Упомянутая кривая и формы колебаний напряжения, потока и тока представлены на странице 455, например, работы: Electrotechnique - 3ème èdition, by Thèodore Wildi, De Boeck Supèrieur, 2003.
Следует отметить, что здесь интегрирование выполняют для периода кривой тока с целью определения функции передачи датчика. Поэтому на интегрирование не влияют дрейфы, в отличие от упомянутых выше способов предшествующего уровня техники, в которых используют интегрирование напряжения в течение длительного периода для вывода остаточного потока.
В качестве альтернативы, кривая φ(I) гистерезиса может быть построена из кривой насыщения трансформатора, которую предоставляет производитель трансформатора. Упомянутая кривая насыщения, построенная с использованием последовательности тестов, в условиях без нагрузки, представляет собой нелинейную кривую напряжения на выводах первичной обмотки, как функцию тока. Соответствующая кривая φ(I) гистерезиса может быть вычерчена с использованием адаптированного программного обеспечения для моделирования, такого как программное обеспечение ЕМТР.
3) На кривой φ(I) измеряют величину Δφ, которая соответствует разности между минимальным и максимальным значениями φ, когда ток пересекает ноль (то есть I=0).
4) Вычерчивают кривую B(I), как показано на фиг.5, по результатам измерений магнитной индукции, полученной с помощью датчика в разное время, и по результатам измерений тока в первичной обмотке в те же моменты времени, когда в трансформатор (без нагрузки) подают переменное питание.
5) На кривой B(I) измеряют величину ΔB, которая соответствует разности между минимальным и максимальным значениями B, когда ток пересекает ноль.
6) Рассчитывают A2, используя следующую формулу:

где n представляет собой количество витков индуктивной обмотки, и Sa представляет собой поперечное сечение магнитной цепи.
Когда два датчика расположены симметрично относительно магнитной цепи и возмущающего поля, компонент возмущающего поля модифицируется таким же образом в результате присутствия магнитной цепи.
Результаты измерения индукции, выполненные двумя датчиками, поэтому можно записать следующим образом:
Bsensor1=A1·B0+A2·Ba
Bsensor2=A1·B0-A2·Ba
Зная A2, из них возможно вывести Ba, используя результаты измерений, полученные с помощью двух датчиков и посредством вычитания, которое позволяет устранить компонент возмущающего поля:
Bsensor1-Bsensor2=2A2·Ba
Затем возможно определить значение потока, циркулирующего в магнитной цепи, который определен следующим уравнением:
ϕa=n·Ba·Sa
Датчики магнитного поля
Система измерения содержит, по меньшей мере, один датчик магнитного поля.
Датчики этого типа существуют на рынке, и специалист в данной области техники может выбрать соответствующую модель датчика.
Предпочтительно, датчики представляют собой векторные магнитометры ″феррозондового″ типа, в котором одна из трех осей выполнена с возможностью измерения компонента магнитного поля вдоль рассматриваемой оси или осей.
Магнитометры этого типа поставляет компания Bartington Instruments, например, под артикулом Mag-03.
Если датчик представляет собой одноосный магнитометр, и требуется разместить этот датчик непосредственно в магнитной цепи, его ось устанавливают параллельно основному направлению индукции магнитной цепи для измерения тангенциального компонента потока.
Датчики также могут представлять собой скалярные магнитометры, измеряющие модуль магнитного поля. Затем необходимо ориентировать эти датчики в направлении параллельно направлению потока магнитной цепи.
В зависимости от структуры магнитной цепи может быть целесообразным использовать по меньшей мере два датчика, расположенных так, чтобы способствовать или получать лучшую точность при определения остаточного потока.
Например, возможно размещать два датчика симметрично на каждом участке магнитной цепи (в данном примере на каждой ножке) однофазного или трехфазного трансформатора, имеющего три столбика.
Как упомянуто выше, симметричное размещение датчиков позволяет преодолеть влияние магнитного поля Земли.
Поскольку последнее индуцирует магнитный поток, ориентированный сверху вниз в магнитной цепи, размещение датчиков, для получения компонентов с противоположным знаком для остаточного потока, позволяет исключить эффект возмущающего поля.
Кроме того, в частности, в сложных устройствах, тот факт, что датчик расположен непосредственно на магнитной цепи, позволяет игнорировать паразитные явления.
Количество датчиков также может изменяться, в зависимости от способа, используемого для расчета остаточного потока.
В принципе, малое количество датчиков является достаточным, например один на участок магнитной цепи для трансформатора.
Однако также возможно определять остаточный поток по множеству точечных измерений магнитного поля, в соответствии со способом, описанным в документе WO 02/101405.
В этом случае множество датчиков магнитного поля должно быть размещено вокруг магнитной цепи.
Кроме того, датчик или датчики магнитного поля могут быть размещены непосредственно на магнитной цепи.
Однако упомянутая конфигурация в некоторых случаях может быть трудноосуществимой, поскольку окружающая среда магнитной цепи может быть неблагоприятной для установки и функционирования датчиков (например, присутствие текучих сред с высокой температурой и т.д.).
В этом случае также возможно размещать датчик (датчики) на или в непосредственной близости к кожуху, окружающему магнитную цепь.
Когда распределение магнитного поля вокруг цепи известно (например, в результате теоретического или экспериментального отображения), датчик (датчики) размещают в точках, где магнитное поле является наиболее интенсивным.
В ситуациях, в которых не известно распределение магнитного поля и/или ограничены точки для установки датчиков, необходимо попытаться разместить пары датчиков симметрично относительно возмущающего поля.
Такое решение с размещением на расстоянии от магнитной цепи имеет преимущество, поскольку оно не является интрузивным и позволяет воплотить его на существующих устройствах, без необходимости их модификации.
Датчик или датчики затем располагают на расстоянии от магнитной цепи, которое короче, чем размер цепи, что позволяет выполнять достаточно точное измерение магнитного поля.
Датчики могут быть установлены постоянно на кожухе.
В случае, когда это применимо, становится возможным выполнять измерения в режиме реального времени магнитного состояния магнитной цепи, когда устройство включено, с целью диагностики.
Дополнительный возможный вариант применения изобретения состоит в управлении обработкой трансформатора для устранения или модификации остаточного потока в магнитной цепи с использованием внешнего источника. Измерения, выполняемые датчиками, затем могут использоваться для проверки, позволила или нет обработка эффективно получить требуемый поток в магнитной цепи.
Изобретение также может быть воплощено для управления запуском вращающейся машины, обеспечивая возможность измерения остаточного потока в машине без подачи питания.
Система сбора данных
Система сбора данных выполнена с возможностью сбора данных от разных датчиков и регистрации, и передачи этих данных в систему обработки.
Система обработки данных
Система обработки данных обычно представляет собой процессор, в котором предусмотрено средство, использующее сигналы, полученные системой сбора данных, для расчета значения остаточного потока в магнитной цепи.
В частности, процессор может быть выполнен с возможностью расчета по сигналу, ассоциированному с каждым датчиком, остаточного потока, используя функции передачи упомянутого датчика.
Системы сбора и обработки данных могут быть интегрированы в управляемом устройстве, например, для трансформатора, описанного выше, в корпусе, который закреплен снаружи кожуха или установлен в удаленном месте.
Соединение между датчиками и системами сбора и обработки данных обеспечивается с помощью любого соответствующего электрического соединения.
В конечном итоге, примеры, которые были представлены выше, очевидно, представляют собой только определенные иллюстрации и, никоим образом, не ограничивают область применения изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОДНОЙ МОДУЛЬ | 2012 |
|
RU2592264C2 |
| ДАТЧИК, СПОСОБ И СИСТЕМА ТЕКУЩЕГО КОНТРОЛЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2007 |
|
RU2437105C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОФАЗНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ | 2011 |
|
RU2532415C2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2477561C2 |
| УСТРОЙСТВО ИСТОЧНИКА ПИТАНИЯ | 2013 |
|
RU2617831C2 |
| ЦЕПЬ ЭЛЕКТРОПИТАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ВКЛЮЧАЮЩАЯ В СЕБЯ АСИНХРОННУЮ МАШИНУ | 2011 |
|
RU2525852C1 |
| СХЕМА ДЛЯ ИНДУКТИВНОЙ ПЕРЕДАЧИ ПИТАНИЯ | 2008 |
|
RU2517435C2 |
| СПОСОБ УПРАВЛЕНИЯ МОДУЛЕМ ПЕРЕКЛЮЧЕНИЯ НА ТИРИСТОРНЫХ ПЕРЕКЛЮЧАЮЩИХ ЭЛЕМЕНТАХ | 2017 |
|
RU2754582C2 |
| Магнито-полупроводниковый преобразователь частоты | 1976 |
|
SU736295A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭНЕРГИИ УСКОРЕННЫХ ЭЛЕКТРОНОВ В БЕТАТРОНЕ | 2009 |
|
RU2408903C9 |



Изобретение относится к управлению временем переключения устройства, включающего в себя магнитную цепь и по меньшей мере одну проводящую обмотку. Способ управления временем переключения устройства, содержащего магнитную цепь (1) и по меньшей мере одну проводящую обмотку (2), отличающийся тем, что содержит этапы, на которых получают по меньшей мере один результат измерения магнитного поля, создаваемого остаточным потоком в упомянутой магнитной цепи (1), с помощью по меньшей мере одного датчика (10а, 10b, 10с) магнитного поля, установленного в непосредственной близости к магнитной цепи (1); обрабатывают полученные результаты измерений магнитного поля для того, чтобы вывести из них остаточный поток в магнитной цепи (1), по остаточному потоку определяют оптимальное время переключения для подачи питания в устройство; причем все упомянутые этапы выполняют после отключения устройства. Технический результат заключается в более надежном предотвращении чрезмерного тока при любых переключениях устройства, содержащего магнитную цепь и проводящую обмотку. 5 н. и 6 з.п. ф-лы, 5 ил.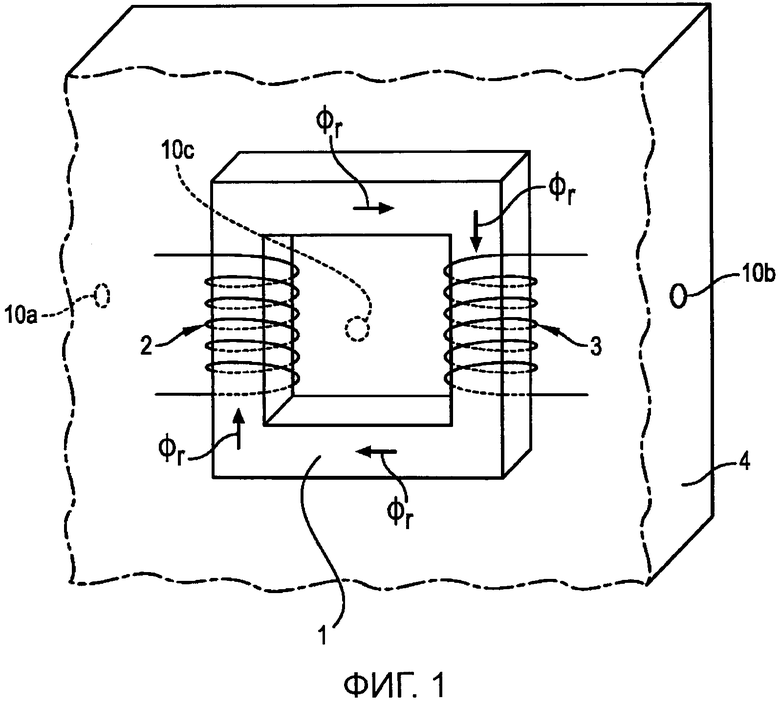
1. Способ управления временем переключения устройства, содержащего магнитную цепь (1) и по меньшей мере одну проводящую обмотку (2), отличающийся тем, что содержит этапы, на которых:
- получают по меньшей мере один результат измерения магнитного поля, создаваемого остаточным потоком в упомянутой магнитной цепи (1), с помощью по меньшей мере одного датчика (10а, 10b, 10с) магнитного поля, установленного в непосредственной близости к магнитной цепи (1);
- обрабатывают полученные результаты измерений магнитного поля для того, чтобы вывести из них остаточный поток в магнитной цепи (1),
- по остаточному потоку определяют оптимальное время переключения для подачи питания в устройство;
причем все упомянутые этапы выполняют после отключения устройства.
2. Способ по п. 1, отличающийся тем, что дополнительно содержит предшествующий этап калибровки датчика (10а, 10b, 10с), на котором определяют функцию передачи между значением магнитного поля, измеренного датчиком, и значением остаточного потока в магнитной цепи (1).
3. Способ по п. 2, отличающийся тем, что по меньшей мере одну пару датчиков помещают на магнитной цепи симметрично относительно упомянутой магнитной цепи и упомянутую функцию передачи определяют в отношении значений магнитного поля, измеряемых упомянутой парой датчиков, и в отношении относительной проницаемости составляющего материала магнитной цепи.
4. Способ по п. 2, отличающийся тем, что по меньшей мере одну пару датчиков помещают в непосредственной близости к магнитной цепи симметрично относительно упомянутой магнитной цепи, при этом при калибровке датчика выполняют этап определения интеграла напряжения на выводах обмотки за один период тока, когда ток пересекает ноль, и этап определения индукции, когда ток пересекает ноль, по кривой гистерезиса индукции в магнитной цепи как функции силы тока, проходящего в обмотке перед отключением питания, и определяют функцию передачи исходя из упомянутых этапов.
5. Способ по одному из пп.1-4, отличающийся тем, что упомянутое устройство содержит кожух (4), окружающий магнитную цепь (1) и обмотку (2), при этом по меньшей мере один датчик (10а, 10b, 10с) магнитного поля помещают на внешней поверхности упомянутого кожуха (4).
6. Способ по одному из пп.1-4, отличающийся тем, что упомянутое устройство содержит несколько силовых входных фаз, при этом определяют значение остаточного потока в магнитной цепи для каждой из фаз упомянутого устройства с отключенным питанием и рассчитывают оптимальный момент времени переключения для фазы, имеющей наибольший остаточный поток.
7. Способ по п. 5, отличающийся тем, что упомянутое устройство содержит несколько силовых входных фаз, при этом определяют значение остаточного потока в магнитной цепи для каждой из фаз упомянутого устройства с отключенным питанием и рассчитывают оптимальный момент времени переключения для фазы, имеющей наибольший остаточный поток.
8. Применение способа по п. 6 для подачи питания в трехфазный трансформатор, в результате чего входную фазу, которая имеет наибольший остаточный поток, включают в оптимальный момент времени, определенный с помощью упомянутого способа для упомянутой входной фазы, затем одновременно включают другие входные фазы в момент времени, когда напряжение, индуцируемое в результате подачи питания в первую фазу, пересекает нулевое значение.
9. Применение способа по п. 7 для подачи питания в трехфазный трансформатор, в результате чего входную фазу, которая имеет наибольший остаточный поток, включают в оптимальный момент времени, определенный с помощью упомянутого способа для упомянутой входной фазы, затем одновременно включают другие входные фазы в момент времени, когда напряжение, индуцируемое в результате подачи питания в первую фазу, пересекает нулевое значение.
10. Система для управления временем переключения устройства, включающего в себя магнитную цепь (1) и по меньшей мере одну проводящую обмотку (2), содержащая:
- по меньшей мере один датчик (10а, 10b, 10с) магнитного поля;
- систему получения данных, являющихся результатами измерений магнитного поля, выполняемых упомянутым датчиком;
- систему обработки данных, получаемых указанной системой получения данных, для расчета остаточного потока (потоков) в магнитной цепи и для определения исходя из остаточного потока оптимального момента времени переключения,
отличающаяся тем, что система выполнена с возможностью выполнять все следующие операции:
- получать по меньшей мере один результат измерения магнитного поля, создаваемого остаточным потоком в упомянутой магнитной цепи (1), с помощью по меньшей мере одного датчика (10a, 10b, 10с) магнитного поля, установленного в непосредственной близости к магнитной цепи (1);
- обрабатывать полученные результаты измерений магнитного поля для того, чтобы вывести из них остаточный поток в магнитной цепи (1),
- по остаточному потоку определять оптимальное время переключения для подачи питания в устройство после отключения устройства.
11. Трансформатор, содержащий магнитную цепь (1), по меньшей мере одну первичную проводящую обмотку (2) и одну вторичную проводящую обмотку (3), при этом магнитная цепь и проводящие обмотки окружены кожухом (4), отличающийся тем, что на магнитной цепи и/или на внешней поверхности кожуха (4) или в непосредственной близости к ней размещен по меньшей мере один датчик (10а, 10b, 10с) магнитного поля, принадлежащий системе по п. 10.
| DE 19641116 A1, 09.04.1998 | |||
| DE 3614057 A1, 29.10.1987 | |||
| DE 4312764 A1, 27.10.1994 | |||
| US 2010013470 A1, 21.01.2010. |

