Область техники, к которой относится изобретение
Настоящее изобретение относится к базовой станции, способу связи и программе
Уровень техники
В настоящее время Группа проекта партнерства третьего поколения (3rd Generation Partnership Project (3GPP)) работает над разработкой системы LTE, представляющей собой стандарт радиосвязи следующего поколения, с целью улучшить работу радиосвязи. В рамках разработки стандарта LTE проводились исследования для увеличения зоны охвата путем введения базовых станций, отличных от макро узлов eNodeB, например, путем введения "домашних" узлов Home eNodeB (базовые станции фемтоячеек или небольшие базовые станции для мобильных телефонов), удаленных радиоблоков (RRH), пикоузлов eNodeB или других подобных устройств. Такая радиосвязь следующего поколения рассмотрена, например, в Заявке JP 2011-521512 А.
Кроме того, в стандарте LTE Rel-10 разработан способ подавления помех, именуемый «Почти пустой субкадр» (Almost Blank Subframe (ABS)). Субкадр ABS представляет собой субкадр, ограничивающий все передачи кроме передач опорного сигнала от макроузла eNodeB в некоторых субкадрах, или субкадр, в котором ограничены все передачи, отличные от передач опорного сигнала от макроузла eNodeB. Субкадр, заданный в качестве субкадра ABS, может уменьшить помехи для сигнала, принимаемого абонентской аппаратурой (UE), относящейся к пикоузлу eNodeB, расположенному в ячейке, образованной макроузлом eNodeB. Кроме того, предложено задавать один и тот же субкадр между соседними макроузлами eNodeB.
Список литературы
Патентная литература 1:
JP 2011-521512 A
Раскрытие изобретения
Однако в группе 3GPP обсуждалась технология multiple_ABS, позволяющая задать различные субкадры ABS между макроузлами eNodeB. Если технология multiple_ABS будет внедрена, между множеством соседствующих макроузлов eNodeB будут перемешаны макроузлы eNodeB, задающие один и тот же субкадр в качестве субкадра ABS, и макроузлы eNodeB, не задающие один и тот же субкадр в качестве субкадра ABS. В результате, даже в субкадрах, заданных в качестве субкадров ABS каким-либо макроузлом eNodeB, сигнал, принимаемый абонентской аппаратурой UE, относящейся к пикоузлу eNodeB, может содержать помехи, принимаемые от соседствующих макроузлов eNodeB.
Поэтому, настоящее изобретение предлагает новые и усовершенствованные базовую станцию, способ связи и программу, которые могут должным образом определить статус защиты от помех в каждом кадре связи. Хорошо ли подходит конфигурация субкадров ABS для конкретной ячейки или области, может зависеть от числа терминалов связи в этой ячейке или области. Таким образом, одно из преимуществ технологии multiple_ABS состоит в том, что эта технология позволяет макроузлам eNodeB использовать различные конфигурации субкадров ABS в разных ячейках или областях, чтобы защитить терминалы связи от помех без излишнего ограничения пропускной способности связи этих терминалов. Однако, как описано выше, использование технологии multiple_ABS ведет к сценарию, в котором одна или более базовых станций вблизи терминала рассматривают данный субкадр (и работают с ним) как субкадр ABS, тогда как другие одна или более базовых станций вблизи этого терминала не рассматривают этот же субкадр в качестве субкадра ABS. В результате терминал может принимать какие-то помехи, связанные с рассматриваемым субкадром. Некоторые аспекты настоящего изобретения относятся к способам определения, на базовой станции, статуса защиты от помех для устройства управления связью, связанного с этой базовой станцией. Кроме того, некоторые аспекты настоящего изобретения относятся к передаче информации от базовой станции к устройству управления связью в формате, обладающем обратной совместимостью с существующими способами передачи информации от базовой станции к устройству управления связью.
Согласно одному из вариантов настоящего изобретения предложен способ управления связью, в котором определяют, посредством процессора базовой станции, статус защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации базовых станций, причем первая из конфигураций отличается по меньшей мере от второй из конфигураций, а часть информации, указывающую вторую из конфигураций, принимают от второй базовой станции.
Согласно другому варианту настоящего изобретения предложена базовая станция, содержащая модуль определения помех, выполненный с возможностью определения статуса защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации двух или более базовых станций, причем первая из конфигураций отличается по меньшей мере от второй из конфигураций, а часть информации, указывающая вторую из конфигураций, принимается от второй базовой станции.
Согласно другому варианту настоящего изобретения предложен машиночитаемый носитель записи с записанной на нем компьютерной программой, которая, при выполнении по меньшей мере одним процессорным модулем, реализует способ, на котором определяют статус защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации базовых станций, причем первая из конфигураций отличается по меньшей мере от второй из конфигураций, а часть информации, указывающую вторую из конфигураций, принимают от второй базовой станции. Согласно другому варианту настоящего изобретения предложена система радиосвязи, содержащая первую базовую станцию и вторую базовую станцию. Первая базовая станция содержит модуль определения помех. Первая базовая станция выполнена с возможностью сохранения информации, указывающей первую конфигурацию. Вторая базовая станция выполнена с возможностью сохранения информации, указывающей вторую конфигурацию. Модуль определения помех первой базовой станции выполнен с возможностью определения статуса защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей первую конфигурацию первой базовой станции, и информации, указывающей вторую конфигурацию второй базовой станции, при этом первая конфигурация отличается от второй конфигурации.
Полезные результаты изобретения
Как описано выше, согласно настоящему изобретению можно должным образом определить статус защиты от помех для каждого кадра связи.
Краткое описание чертежей
Фиг. 1 представляет поясняющую схему, иллюстрирующую конфигурацию системы связи согласно одному из вариантов настоящего изобретения.
Фиг. 2 представляет поясняющую схему, иллюстрирующую формат кадра в системе четвертого поколения (4G)
Фиг. 3 представляет поясняющую схему, иллюстрирующую область увеличения дальности вокруг пикоузла eNodeB 30.
Фиг. 4 представляет поясняющую схему, иллюстрирующую субкадр, заданный в качестве ABS.
Фиг. 5 представляет поясняющую схему, иллюстрирующую субкадр, заданный в качестве субкадра ABS типа MBSFN.
Фиг. 6 представляет поясняющую схему, иллюстрирующую конкретные примеры конфигураций.
Фиг. 7 представляет функциональную блок-схему устройства, иллюстрирующую конфигурацию узла eNodeB согласно первому варианту настоящего изобретения.
Фиг. 8 представляет поясняющую схему, иллюстрирующую конкретный пример определения помех посредством модуля определения помех.
Фиг. 9 представляет логическую схему устройства, иллюстрирующую работу узла eNodeB согласно первому варианту настоящего изобретения.
Фиг. 10 представляет поясняющую схему, иллюстрирующую модифицированный пример определения помех посредством модуля определения помех.
Фиг. 11 представляет логическую схему, иллюстрирующую работу узла eNodeB согласно модифицированному примеру.
Фиг. 12 представляет поясняющую схему, иллюстрирующую пример первого варианта.
Фиг. 13 представляет функциональную блок-схему, иллюстрирующую конфигурацию узла eNodeB согласно второму варианту настоящего изобретения.
Фиг. 14 представляет поясняющую схему, иллюстрирующую пример расположения узла eNodeB и пикоузла eNodeB.
Фиг. 15 представляет логическую схему, иллюстрирующую работу узла eNodeB согласно второму варианту настоящего изобретения.
Фиг. 16 представляет поясняющую схему, иллюстрирующую конфигурацию пикоузла eNodeB согласно третьему варианту настоящего изобретения.
Фиг. 17 представляет функциональную блок-схему, иллюстрирующую конфигурацию абонентской станции UE 20 согласно третьему варианту настоящего изобретения.
Фиг. 18 представляет поясняющую схему, иллюстрирующую конкретный пример измерения качества сигнала согласно третьему варианту настоящего изобретения.
Фиг. 19 представляет поясняющую схему, иллюстрирующую пример применения измерений качества сигнала.
Фиг. 20 представляет схему последовательности операций, иллюстрирующую работу системы связи согласно третьему варианту настоящего изобретения.
Осуществление изобретения
Далее, предпочтительные примеры настоящего изобретения будут описаны подробно со ссылками на прилагаемые чертежи. Отметим, что в настоящем описании и на прилагаемых чертежах структурным элементам, имеющим по существу одинаковые функции и структуру, присвоены одни и те же цифровые позиционные обозначения, а повторные пояснения этих структурных элементов опущены.
Кроме того, в настоящем описании и на чертежах имеются случаи, когда несколько элементов, имеющих по существу одни и те же функции и структуру, отличают один от другого посредством разных букв, присоединенных после одинакового позиционного обозначения. Например, несколько конфигураций, имеющих по существу одинаковую функциональную конфигурацию, могут, если нужно, отличаться одна от другой как абонентская станция UE 20А, 20В и 20С. Однако если в совокупности из нескольких элементов, имеющих по существу одинаковую функциональную конфигурацию, не нужно специально отличать один элемент от другого, им присваивают только общее позиционное обозначение. Например, когда нет необходимости специально отличать одну от другой абонентскую станцию 20А, 20В и 20С, их можно просто именовать станция UE 20.
Кроме того, настоящее изобретение будет описано в следующем порядке.
1. Базовая конфигурация системы связи
2. Первый вариант
2-1. Конфигурация узла eNodeB согласно первому варианту
2-2. Работа узла eNodeB согласно первому варианту
2-3. Пример применения
3. Второй вариант
3-1. Конфигурация узла eNodeB согласно второму варианту
3-2. Работа узла eNodeB согласно второму варианту
3-3. Модифицированный пример
4. Третий вариант
4-1. Конфигурация пикоузла eNodeB
4-2. Конфигурация абонентской станции UE
4-3. Измерение качества сигнала
4-4. Работа системы связи
5. Заключение
1. Базовая конфигурация системы связи
Фиг. 1 представляет поясняющую схему, иллюстрирующую конфигурацию системы связи согласно одному из вариантов настоящего изобретения. Как показано на фиг. 1, система связи согласно одному из вариантов настоящего изобретения содержит несколько узлов eNodeB 10, несколько абонентских станций (UE) 20 и несколько прикоузлов eNodeB 30.
Узел eNodeB 10 представляет собой базовую радиостанцию, поддерживающую связь со станцией UE 20 в ячейке, образованной узлом eNodeB 10, иными словами в области связи узла eNodeB 10 (в настоящем описании, если специально не указано иное, узел eNodeB 10 представляет собой макроузел eNodeB). Узел eNodeB 10 имеет достаточно большую выходную мощность, чтобы создать ячейку размером от нескольких километров до 10 км. Кроме того, каждый узел eNodeB 10 соединен с кабелем, именуемым интерфейс Х2, и может обмениваться данными управления или данными абонентов с другим узлом eNodeB 10 через этот интерфейс Х2.
Пикоузел eNodeB 30 представляет собой маломощное устройство управления связью, мощность передач которого меньше мощности передач узла eNodeB 10, например, приблизительно на 10 дБ. Поэтому пикоузел eNodeB 30 образует ячейку меньшего размера, чем узел eNodeB 10, в пределах ячейки, образованной этим узлом eNodeB 10. Пикоузел eNodeB 30 управляет связью со станцией UE 20, относящейся к этому пикоузлу eNodeB 30. Кроме того, пикоузел eNodeB 30 соединен с узлом eNodeB 10 посредством интерфейса Х2 и может обмениваться данными управления или данными абонентов с этим узлом eNodeB 10 через этот интерфейс Х2.
Станция UE 20 представляет собой терминал связи, осуществляющий обработку приема в ресурсном блоке для нисходящей линии, назначенном базовой станцией, такой как узел eNodeB 10 или пикоузел eNodeB 10, и осуществляющий обработку передачи в ресурсном блоке восходящей линии. В примере, показанном на фиг. 1, станция UE 20А относится к узлу eNodeB 10А и осуществляет связь в восходящей линии и связь в нисходящей линии с этим узлом eNodeB 10А. Кроме того, станция UE 20 В относится к пикоузлу eNodeB 30 и осуществляет связь в восходящей линии и связь в нисходящей линии с этим пикоузлом eNodeB 30.
Станция UE 20, например, может представлять собой смартфон или устройство для обработки информации, такое как персональный компьютер (PC), бытовое устройство обработки изображений (устройство записи DVD, видеомагнитофон или подобное устройство), персональный цифровой помощник (PDA), игровая приставка для семейного использования, бытовая электроаппаратура или подобное устройство. Кроме того, станция UE 20 может представлять собой устройство мобильной связи, такое как портативный телефон, персональный радиотелефон (PHS), портативное устройство воспроизведения музыки (плеер), портативное устройство обработки видео, портативная игровая приставка или подобное устройство.
Конфигурация кадра
Далее будет описан радио кадр, совместно используемый базовой станцией, такой как описанный выше узел eNodeB 10, и станцией UE 20.
Фиг. 2 представляет поясняющую схему, иллюстрирующую формат кадра в системе четвертого поколения (4G). Как показано на фиг. 2, радио кадр продолжительностью 10 мс содержит десять субкадров продолжительностью 1 мс, а именно субкадры с #0 по #9. Каждый субкадр представляет собой один ресурсный блок, содержащий 12 поднесущих × 14 символов системы с ортогональным частотным уплотнением (OFDM), а планирование назначений осуществляется в единицах ресурсных блоков. Кроме того, один OFDM-символ соответствует единице, используемой в системе связи с OFDM-модуляцией, и представляет собой единицу для вывода данных, обработанных за один раз посредством быстрого преобразования Фурье (БПФ (FFT)).
Кроме того, как показано на фиг. 2, каждый субкадр содержит область управления и область данных. Эта область управления содержит первые от 1 до 3 OFDM-символов (фиг. 2 иллюстрирует пример, в котором область управления содержит 3 OFDM-символа) и используется для передачи сигнала управления, именуемого физическим нисходящим каналом управления (PDCCH). Кроме того, область данных, следующая за областью управления, используется для передачи данных абонента или аналогичных данных, именуемых сигналом физического нисходящего совместно используемого канала (PDSCH).
Кроме того, в области управления и в области данных находится специфичный для ячейки опорный сигнал (RS). Станция UE 20 может осуществлять оценку характеристики канала на основе приема этого опорного сигнала и может декодировать сигнал канала PDSCH и аналогичные сигналы на основе результата оценки характеристики канала.
Увеличение дальности
Станция UE 20 измеряет мощность принимаемого сигнала и в основном определяет базовую станцию, которой соответствует наибольшая мощность принимаемого сигнала, в качестве пункта назначения устанавливаемого соединения. Однако, как описано выше, пикоузел eNodeB 30 имеет мощность передач ниже мощности передач узла eNodeB 10. Поэтому, при измерениях мощности принимаемого сигнала на станции UE 20, даже если эта станция UE 20 расположена рядом с пикоузлом eNodeB 30, мощность сигнала, принимаемого от узла eNodeB 10, часто оказывается высокой. В результате, вероятность того, что станция UE 20 будет относиться к пикоузлу eNodeB 30 (поддерживать связь с ним) уменьшается.
Для решения такой проблемы была рассмотрена технология увеличения дальности. «Увеличение дальности» представляет собой технологию увеличения размеров ячейки пикоузла eNodeB 30. В частности, технология увеличения дальности представляет собой технологию, рассматривающую, когда станция UE 20 выполняет измерения, мощность сигнала, принимаемого от пикозула eNodeB 30, как величину, превосходящую реально измеренную величину приблизительно на 20 дБ.
Фиг. 3 представляет поясняющую схему, иллюстрирующую область увеличения дальности вокруг пикоузла eNodeB 30. В результате применения технологии увеличения дальности размер ячейки, образованной пикоузлом eNodeB 30, увеличен до размеров области увеличенной дальности, показанной на фиг. 3. В такой конфигурации можно увеличить вероятность того, что станция UE 20 относится к пикоузлу eNodeB 30 (поддерживает связь с ним).
С другой стороны, на станции UE 20, которая относится к пикоузлу eNodeB 30 и расположена в области увеличенной дальности, мощность сигнала, принимаемого от узла eNodeB 10, может быть выше мощности сигнала, принимаемого от пикоузла eNodeB 30, приблизительно на 20 дБ. По этой причине важно должным образом подавлять помехи от узла eNodeB 10. В дальнейшем будут рассмотрены подавление помех для области данных, в которой передают сигнал канала PDSCH, и подавление помех для области управления, в которой передают сигнал канала PDCCH.
Подавление помех в области данных
Технология «согласование помех между ячейками» (inter cell interference coordination (ICIC)) делает возможным управление помехами в области данных. В частности, узел eNodeB 10 может подавлять помехи в области данных в единицах ресурсных блоков путем обмена через интерфейс Х2 информацией о ресурсном блоке, имеющем сильные помехи, или о ресурсном блоке, для которого ожидается присутствие сильных помех, относительно соседствующих узлов eNodeB 10. С другой стороны, согласно технологии ICIC передачи сигнала канала PDCCH не останавливаются, вследствие чего было трудно использовать технологию ICIC, чтобы избежать помех для области управления.
Подавление помех в области управления - субкадры ABS
По этой причине для подавления помех в области управления использовались почти пустые субкадры (Almost Blank Subframe (ABS)). Технология субкадров ABS ограничивает передачи всех сигналов, кроме опорного сигнала, от узла eNodeB в некоторых субкадров. Субкадр, заданный в качестве субкадра ABS, становится кадром с ограниченной передачей, в котором ограничены все передачи, отличные от опорного сигнала. В дальнейшем, субкадр ABS будет описан более подробно со ссылками на фиг. 4.
Фиг. 4 представляет поясняющую схему, иллюстрирующую субкадр, заданный в качестве субкадра ABS. Как показано на фиг. 4, в субкадре, заданном в качестве субкадра ABS, сигналы канала PDCCH и канала PDSCH не передают, а передают опорный сигнал области управления и опорный сигнал области данных. Поэтому, в субкадре, заданном в качестве субкадра ABS узлом eNodeB 10, помехи подавлены и в области управления, и в области данных пикоузла eNodeB 30.
Кроме того, совокупность субкадров типа ABS содержит субкадры ABS типа субкадра для одночастотной сети многоадресного мультимедийного вещания (Multimedia Broadcast multicast Single Frequency Network (MBSFN)). В субкадре, заданном в качестве субкадра ABS типа MBSFN, как показано на фиг. 5, не передают опорный сигнал области данных, а передают только опорный сигнал области управления. По этой причине в субкадре, заданном в качестве субкадра ABS типа MBSFN, помехи для сигнала пикоузла eNodeB 30 подавлены сильнее, чем в обычном субкадре ABS, показанном на фиг. 4.
Схема задания субкадров ABS
В качестве схемы задания субкадров ABS определены несколько конфигураций, период каждой из которых составляет восемь субкадров. В дальнейшем конкретные примеры этих конфигураций будут рассмотрены со ссылками на фиг. 6.
Фиг. 6 представляет поясняющую схему, иллюстрирующую конкретные примеры конфигураций. Как показано на фиг. 6, в конфигурации 1 первый субкадр не задан в качестве субкадра ABS, а субкадры со второго по восьмой являются субкадрами ABS. Кроме того, в конфигурации 2 первый и пятый субкадры не заданы в качестве субкадров ABS, а субкадры со второго по четвертый и субкадры с шестого по восьмой являются субкадрами ABS. Аналогичным образом, в конфигурациях с 3 по 5 субкадры ABS задают в соответствии со схемами, имеющими период 8 мс.
Кроме того, хотя продолжительность одного радио кадра равна 10 мс, поскольку период гибридного квитирования (ACK) равен 8 мс, период конфигураций также определен равным 8 мс для обеспечения согласованности с гибридным квитированием ACK.
Multiple_ABS
До сих пор рассматривался случай задания одинаковой конфигурации из всей совокупности конфигураций в соседствующих узлах eNodeB 10. В примере, показанном на фиг. 1, субкадр, заданный в качестве субкадра ABS узлом eNodeB 10А, считается также субкадром, заданным в качестве субкадра ABS узлами eNodeB 10В и 10С. По этой причине, в субкадре, заданном в качестве субкадра ABS узлом eNodeB 10А, станция UE 20В, расположенная возле границы ячейки узла eNodeB 10А, принимает меньше помех от соседствующих узлов eNodeB 10В и 10С.
Однако в последнее время обсуждалась технология multipleABS, которая должна позволить задать различные конфигурации для соседствующих узлов eNodeB 10. С учетом этого, подходящее число субкадров, задаваемых в качестве субкадров ABS тем или иным узлом eNodeB 10, может быть различным. Другими словами, тогда как узел eNodeB 10, к которому относятся большое число пикоузлов eNodeB 30, должен задавать большое число субкадров в качестве субкадров ABS, узел eNodeB 10, к которому относятся небольшое число пикоузлов eNodeB 30, будет иметь меньшую потребность задавать большое число субкадров в качестве субкадров ABS.
Вследствие такого внедрения технологии multiple_ABS, в совокупности нескольких соседствующих макроузлов eNodeB будут перемешаны макроузлы eNodeB, задающие один и тот же субкадр в качестве субкадра ABS, и макроузлы eNodeB, не задающие один и тот же субкадр в качестве субкадра ABS. Например, в случае, когда узел eNodeB 10А, показанный на фиг. 1, задает конфигурацию 2 и узел eNodeB 10В задает конфигурацию 5 субкадр #3, задан в качестве субкадра ABS узлом eNodeB 10А, но узел eNodeB 10В не задает субкадр #3 в качестве субкадра ABS. По этой причине, станция UE 20В, расположенная возле границы ячейки узла eNodeB 10А, может принимать помехи от узла eNodeB в субкадре #3.
Второй вариант
Резюме первого варианта
Как описано выше, если при внедрении технологии multiple_ABS учитывать только конфигурацию узла eNodeB 10, к которому относится рассматриваемый пикоузел eNodeB 30, будет трудно избежать помех для этого пикоузла eNodeB 30.
По этой причине, если рассматривать случай нескольких узлов eNodeB 10, каждый из которых сообщают пикоузлу eNodeB 30 о своей конфигурации, такие сообщения ведут к увеличению нагрузки на интерфейс Х2, соединенный с пикоузлом eNodeB 30. Кроме того, поскольку в принципе пикоузел eNodeB 30 обязательно имеет интерфейс Х2, соединяющий его с одним из узлов eNodeB 10, этот один узел eNodeB 10 может сообщить о своей конфигурации.
Кроме того, в настоящем описании до сих пор рассматривался случай совместного использования одной и той же конфигурации узлом eNodeB 10 и пикоузлом eNodeB 30 посредством интерфейса Х2. Поэтому, с точки зрения обратной совместимости нежелательно извещать пикоузел eNodeB 30 о нескольких конфигурациях нескольких узлов eNodeB 10.
Таким образом, первый вариант настоящего изобретения был разработан с учетом указанных выше обстоятельств. Согласно первому варианту настоящего изобретения, даже когда внедрена технология multiple_ABS, можно должным образом определить статус защиты от помех для каждого кадра. В последующем первый вариант настоящего изобретения будет описан подробно.
2-1. Конфигурация узла eNodeB согласно первому варианту
Фиг. 7 представляет функциональную блок-схему, иллюстрирующую конфигурацию узла eNodeB 10 согласно первому варианту настоящего изобретения. Как показано на фиг. 7, узел eNodeB 10 согласно первому варианту настоящего изобретения содержит группу 104 антенн, модуль 110 обработки радиосигнала, цифроаналоговый/аналого-цифровой преобразователь 120, цифровой процессор 130, модуль 140 задания субкадра ABS, модуль 150 связи через интерфейс Х2, модуль 160 сохранения конфигурирации и модуль 170 определения помех.
Группа антенн
Группа 104 антенн получает электрический высокочастотный сигнал путем приема радиосигнала от станции UE 20 и передает этот высокочастотный сигнал в модуль 110 обработки радиосигнала. Кроме того, группа 104 антенн передает радиосигнал в адрес абонентской станции UE 20 на основе высокочастотного сигнала, поступившего от модуля 110 обработки радиосигнала. Поскольку узел eNodeB 10-1 содержит группу 104 антенн, имеющую несколько антенн, узел eNodeB 10 может осуществлять связь в режиме «несколько входов-несколько выходов» (MIMO) или связь с разнесенным приемом/передачей.
Модуль обработки радиосигнала
Модуль 110 обработки радиосигнала преобразует высокочастотный сигнал, поступивший от группы 104 антенн, в сигнал видеодиапазона (сигнал восходящей линии) путем выполнения аналоговой обработки, такой как усиление, фильтрация и преобразование вниз по частоте. Кроме того, модуль 110 обработки радиосигнала преобразует сигнал видеодиапазона (сигнал нисходящей линии), поступающий от цифроаналогового/аналого-цифрового преобразователя 120, в высокочастотный сигнал.
Цифроаналоговый/аналого-цифровой преобразователь
Цифроаналоговый/аналого-цифровой преобразователь 120 преобразует сигнал восходящей линии в аналоговом формате, поступающий от модуля 110 обработки радиосигнала, в цифровой формат и передает преобразованный сигнал восходящей линии в цифровом формате цифровому процессору 130. Цифроаналоговый/аналого-цифровой преобразователь 120 преобразует сигнал нисходящей линии в цифровом формате, поступающий от цифрового процессора 130 обработки радиосигнала, в аналоговый формат и передает сигнал нисходящей линии в аналоговом формате модулю 110 обработки радиосигнала.
Цифровой процессор
Цифровой процессор 130 осуществляет цифровую обработку сигнала восходящей линии, поступающего от цифроаналогового/аналого-цифрового преобразователя 120, и выделяет сигнал управления, такой как сигнал физического канала управления восходящей линии (PUCCH), или данные абонента, такие как сигнал физического восходящего совместно используемого канала (PUSCH). Кроме того, цифровой процессор 130 генерирует сигнал нисходящей линии в цифровом формате для передачи от узла eNodeB 10 и передает этот сигнал нисходящей линии цифроаналоговому/аналого-цифровому преобразователю 120.
Модуль задания субкадра ABS
Модуль 140 задания субкадра ABS задает субкадр ABS путем выбора и настройки конфигурации, описанной со ссылками фиг. 6.
Модуль связи через интерфейс Х2
Модуль 150 связи через интерфейс Х2 конфигурирован для осуществления связи с другим узлом eNodeB 10 или с пикоузлом eNodeB 30 через интерфейс Х2. Например, модуль 150 связи через интерфейс Х2 имеет функцию модуля приема информации настройки, который принимает информацию настройки, иными словами, конфигурацию субкадров ABS соседствующего узла eNodeB 10. Кроме того, модуль 150 связи через интерфейс Х2 имеет функцию модуля извещения, который сообщает пикоузлу eNodeB 30 информацию, указывающую результат определения статуса защиты от помех для каждого субкадра, полученный модулем 170 определения помех.
Модуль сохранения конфигурации
Модуль 160 сохранения конфигурации осуществляет сохранение информации о конфигурациях соседствующих узлов eNodeB 10, принятой модулем 150 связи через интерфейс Х2.
Модуль определения помех
Модуль 170 определения помех осуществляет определение статуса защиты от помех для станции UE 20, относящейся к пикоузлу eNodeB 30, в пределах ячейки узла eNodeB 10, для каждого субкадра. В частности, модуль 170 определения помех осуществляет определение статуса защиты от помех на основе конфигурации, заданной посредством модуля 140 задания субкадра ABS, и конфигурации соседствующего узла eNodeB 10, сохраняемой в модуле 160 сохранения конфигурации.
Например, в субкадре, заданном в качестве субкадра ABS, как узлом eNodeB 10, к которому относится целевой пикоузел eNodeB 30, находящийся в ячейке этого узла eNodeB 10 (в дальнейшем, по мере необходимости, именуемый обслуживающим узлом eNodeB 10), так и соседствующими узлами eNodeB 10, считается, что станция UE 20, относящаяся к указанному пикоузлу eNodeB 30, принимает меньше помех. Поэтому модуль 170 определения помех определяет, что субкадр, заданный в качестве субкадра ABS обслуживающим узлом eNodeB 10 и соседствующими узлами eNodeB 10, является защищенным кадром.
Кроме того, в субкадре, не заданном в качестве субкадра ABS ни обслуживающим узлом eNodeB 10, ни соседствующими узлами eNodeB 10, считается, что станция UE 20, относящаяся к указанному пикоузлу eNodeB 30, будет принимать помехи от указанных нескольких узлов eNodeB 10. Поэтому модуль 170 определения помех определяет, что субкадр, не заданный в качестве субкадра ABS ни обслуживающим узлом eNodeB 10, ни соседствующими узлами eNodeB 10, является незащищенным (Not Protected) кадром.
Кроме того, в субкадре, заданном в качестве субкадра ABS соседствующими узлами eNodeB 10, но не заданном в качестве субкадра ABS обслуживающим узлом eNodeB 10, высока вероятность, что станция UE 20, относящаяся к указанному пикоузлу eNodeB 30, будет принимать помехи от обслуживающего узла eNodeB 10. Поэтому модуль 170 определения помех может определить, что субкадр, заданный в качестве субкадра ABS соседствующими узлами eNodeB 10, но не заданный в качестве субкадра ABS обслуживающим узлом eNodeB 10, является незащищенным кадром.
Кроме того, в субкадре, заданном в качестве субкадра ABS обслуживающим узлом eNodeB 10, но не заданном в качестве субкадра ABS соседствующими узлами eNodeB 10, имеется вероятность, что станция UE 20, относящаяся к указанному пикоузлу eNodeB 30, будет принимать помехи от соседствующих узлов eNodeB 10. Другими словами, станция UE 20, относящаяся к пикоузлу eNodeB 30, может принимать сильные или слабые помехи. Поэтому модуль 170 определения помех может определить, что субкадр, заданный в качестве субкадра ABS обслуживающим узлом eNodeB 10, но не заданный в качестве субкадра ABS соседствующими узлами eNodeB 10, является частично защищенным (Partial Protected) кадром, статус помех которого не определен.
В дальнейшем конкретный пример определения статуса посредством модуля 170 определения помех будет рассмотрен со ссылками на фиг. 8.
Фиг. 8 представляет поясняющую схему, иллюстрирующую конкретный пример определения статуса помех посредством модуля 170 определения помех. Более конкретно, Фиг. 8 иллюстрирует пример, в котором обслуживающий узел eNodeB 10А задал конфигурацию 2, а соседствующие узлы eNodeB 10В и 10С задали конфигурации 3 и 4, соответственно.
В этом случае, поскольку субкадры #2 и #6 заданы в качестве субкадров ABS всеми узлами eNodeB 10, модуль 170 определения помех определяет, что эти субкадры #2 и #6 являются защищенными кадрами.
Кроме того, поскольку субкадры #1 и #5 не заданы в качестве субкадров ABS ни одним из узлов eNodeB 10, модуль 170 определения помех определяет, что эти субкадры #1 и #5 являются незащищенными кадрами.
Более того, поскольку субкадры #3 и #7 заданы в качестве субкадров ABS соседствующим узлом eNodeB 10В, но не заданы в качестве субкадров ABS обслуживающим узлом eNodeB 10А, модуль 170 определения помех определяет, что эти субкадры #3 и #7 являются незащищенными кадрами.
Кроме того, поскольку субкадры #4 и #8 заданы в качестве субкадров ABS обслуживающим узлом eNodeB 10, но не заданы в качестве субкадров ABS соседствующими узлами eNodeB 10, модуль 170 определения помех определяет, что эти субкадры #4 и #8 являются частично защищенными кадрами.
Когда модуль 170 определение помех выполнит определение статуса защиты от помех для каждого субкадра, как описано выше, этот модуль 170 определения помех специфицирует конфигурацию X в соответствии с результатами определения. В этом варианте добавлена конфигурация, определяющая сочетание, содержащее частично защищенные кадры в конфигурациях с 1 по 5, описанных со ссылками на фиг. 6, а модуль 170 определение помех специфицирует конфигурацию X, выбранную из совокупности этих конфигураций, в соответствии с результатами определения. Модуль 150 связи через интерфейс Х2 сообщает пикоузлу eNodeB 30 конфигурацию X, указанную модулем 170 определения помех.
При использовании такой конфигурации пикоузел eNodeB 30 может должным образом проверять статус защиты от помех каждого субкадра на основе одной конфигурации, принятой от обслуживающего узла eNodeB 10, без извещения этого пикоузла eNodeB 30 о нескольких конфигурациях от нескольких узлов eNodeB 10.
2-2. Работа узла eNodeB согласно первому варианту
Выше была описана конфигурация узла eNodeB 10 согласно первому варианту настоящего изобретения. Далее, работа узла eNodeB 10 согласно первому варианту настоящего изобретения будет описана со ссылками фиг. 9.
Фиг. 9 представляет логическую схему, иллюстрирующую работу узла eNodeB 10 согласно первому варианту настоящего изобретения. Как показано на фиг. 9, сначала модуль 140 задания субкадров ABS в составе обслуживающего узла eNodeB 10 выбирает конфигурацию и задает субкадр ABS (S404), а модуль 150 связи через интерфейс Х2 принимает конфигурацию соседствующего узла eNodeB 10 (S408). После этого, модуль 170 определения помех выполняет операции определения, указанные для этапов с S412 по S428, для каждого субкадра.
В частности, модуль 170 определения помех определяет, задан ли целевой субкадр в качестве субкадра ABS обслуживающим узлом eNodeB 10 (S412). Если целевой субкадр не задан в качестве субкадра ABS обслуживающим узлом eNodeB 10, модуль 170 определения помех определяет, что соответствующий субкадр является незащищенным кадром (S416).
С другой стороны, если целевой субкадр задан в качестве субкадра ABS обслуживающим узлом eNodeB 10, модуль 170 определения помех определяет, задан ли соответствующий субкадр в качестве субкадра ABS всеми соседствующими узлами eNodeB 10 (S420). Когда все соседствующие узлы eNodeB 10 задали соответствующий субкадр в качестве субкадра ABS, модуль 170 определения помех определяет, что соответствующий субкадр является защищенным кадром (S424). С другой стороны, если некоторые соседствующие узлы eNodeB 10 не задали соответствующий субкадр в качестве субкадра ABS (S420), модуль 170 определения помех определяет, что соответствующий субкадр является частично защищенным субкадром (S428).
После этого, модуль 170 определения помех специфицирует конфигурацию, соответствующую результатам определения статуса для каждого субкадра, а модуль 150 связи через интерфейс Х2 сообщает пикоузлу eNodeB 30 о специфицированной конфигурации (S432).
Модифицированный пример
Кроме того, хотя приведенное выше описание дано для примера, в котором с субкадром, заданным в качестве субкадра ABS соседствующими узлами eNodeB 10, но не заданным в качестве субкадра ABS обслуживающим узлом eNodeB 10, обращаются как с незащищенным кадром, рассматриваемый вариант этим примером не ограничивается. Например, модуль 170 определения помех может определить, что субкадр, заданный в качестве субкадра ABS соседствующими узлами eNodeB 10, но не заданный в качестве субкадра ABS обслуживающим узлом eNodeB 10, является частично защищенным кадром. В дальнейшем такой модифицированный пример будет описан со ссылками на фиг. 10 и 11.
Фиг. 10 представляет поясняющую схему, иллюстрирующую модифицированный пример определения статуса помех посредством модуля 170 определения помех. Более конкретно, как и на фиг. 8, фиг. 10 иллюстрирует пример, в котором обслуживающий узел eNodeB 10A задал конфигурацию 2, а соседствующие узлы eNodeB 10В и 10С задали конфигурации 3 и 4, соответственно.
В этом случае, поскольку субкадры #3 и #7 представляют собой субкадры, заданные в качестве субкадров ABS соседствующим узлом eNodeB 10В, но не заданные в качестве субкадров ABS обслуживающим узлом eNodeB 10А, модуль 170 определения помех согласно модифицированному примеру, как показано на фиг. 10, определяет, что эти субкадры #3 и #7 являются частично защищенными кадрами. Кроме того, поскольку результаты определения статуса относительно субкадров #1, #2, #4-6 и #8 являются такими же, как описано со ссылками на фиг. 8, подробное описание этих результатов здесь будет опущено.
Фиг. 11 представляет логическую схему, иллюстрирующую работу согласно модифицированному примеру. Как показано на фиг. 11, сначала модуль 140 задания субкадров ABS в составе обслуживающего узла eNodeB 10 выбирает конфигурацию и задает субкадр ABS (S404), а модуль 150 связи через интерфейс Х2 принимает информацию о конфигурации соседствующего узла eNodeB 10 (S408). После этого, модуль 170 определения помех выполняет операции определения, указанные для этапов с S414 по S430, для каждого субкадра.
В частности, модуль 170 определения помех определяет, задан ли целевой субкадр в качестве субкадра ABS всеми узлами eNodeB 10, включая обслуживающий узел eNodeB 10 и соседствующий узел eNodeB 10 (S414). Если целевой субкадр задан в качестве субкадра ABS всеми узлами eNodeB 10, модуль 170 определения помех определяет, что соответствующий субкадр является защищенным кадром (S418).
С другой стороны, модуль 170 определения помех определяет, задан ли целевой субкадр в качестве субкадра ABS не всеми, а только некоторыми узлами eNodeB 10 (S422). Если целевой субкадр не задан в качестве субкадра ABS ни одним из узлов eNodeB 10, модуль 170 определения помех определяет, что соответствующий субкадр является незащищенным кадром (S426). С другой стороны, если целевой субкадр задан в качестве субкадра ABS только некоторыми узлами eNodeB 10, модуль 170 определения помех определяет, что соответствующий субкадр является частично защищенным кадром (S418).
После этого, модуль 170 определение помех специфицирует конфигурацию, соответствующую результатам определения статуса для каждого субкадра, а модуль 150 связи через интерфейс Х2 сообщает пикоузлу eNodeB 30 информацию о специфицированной конфигурации (S432).
2-3. Пример применения
Как описано выше, согласно рассматриваемому варианту, поскольку пикоузел eNodeB 30 извещен о том, что конфигурация указывает частично защищенный кадр, где имеется вероятность помех, этот пикоузел eNodeB 30 может, например, планировать ресурсы для станции UE 20, расположенной в области увеличенной дальности, избегая при этом частично защищенного кадра в дополнение к незащищенному кадру.
Однако если число частично защищенных кадров увеличивается, это оказывает нежелательное воздействие на объем ресурсов, которые может назначать пикоузел eNodeB 30. Поэтому можно предположить, что возможна ситуация, когда пропускная способность пикоузла eNodeB 30 будет уменьшена. Поэтому ниже, в качестве примера рассматриваемого варианта будет рассмотрена конфигурация для уменьшения числа частично защищенных кадров.
Модуль 140 задания субкадра ABS согласно этому примеру применения задает конфигурацию каждого сектора узла eNodeB 10 во взаимодействии с соседствующими узлами eNodeB 10. В частности, модуль 140 задания субкадра ABS в составе каждого из нескольких соседствующих узлов eNodeB 10 задает одну и ту же конфигурацию для сектора, ориентированного по направлению к центру совокупности нескольких соседствующих узлов eNodeB 10. Далее, более подробное описание будет дано со ссылками на фиг. 12.
Фиг. 12 представляет поясняющую схему, иллюстрирующую пример применения первого варианта. Как показано на фиг. 12, сектор узла eNodeB 10А, ориентированный по направлению к центру совокупности узлов с eNodeB 10А по 10D, является первым сектором S1A. Кроме того, сектор узла eNodeB 10В, ориентированный по направлению к центру совокупности узлов с eNodeB 10А по 10D, является первым сектором S1B. Также, сектор узла eNodeB 10С, ориентированный по направлению к центру совокупности узлов с eNodeB 10А по 10D, является первым сектором S1C. Аналогично, сектор узла eNodeB 10D, ориентированный по направлению к центру совокупности узлов с eNodeB 10А по 10D, является первым сектором S1D.
Поэтому, модули 140 задания субкадров ABS в составе узлов eNodeB с 10А по 10D задают одну и ту же конфигурацию 2 для первого сектора S1A узла eNodeB 10А, первого сектора S1B узла eNodeB 10В, первого сектора S1C узла eNodeB 10С и первого сектора S1D узла eNodeB 10D.
Аналогично, модули 140 задания субкадров ABS в составе узлов eNodeB 10А и с 10D по 10F задают одну и ту же конфигурацию 3 для первого сектора S2A узла eNodeB 10А, первого сектора S2D узла eNodeB 10D, первого сектора S1E узла eNodeB 10Е и первого сектора S1F узла eNodeB 10F.
Здесь, модуль 170 определение помех согласно примеру применения определяет помехи на основе конфигурации, заданной для сектора каждого из соседствующих узлов eNodeB 10, ориентированного по направлению к центру совокупности узлов eNodeB 10. По этой причине, согласно примеру применения, в котором для этих секторов задана одна и та же конфигурация, можно избежать «перемешивания» узлов eNodeB 10, задающих один и тот же субкадр в качестве субкадра ABS, и узлов eNodeB 10, не задающих этот же субкадр в качестве субкадра ABS. Поэтому число частично защищенньгх кадров можно уменьшить. В результате, можно улучшить пропускную способность пикоузла eNodeB 30.
3. Второй вариант
Выше описан первый вариант настоящего изобретения. Далее будет описан второй вариант настоящего изобретения. Согласно второму варианту конфигурация, подходящая для каждого пикоузла eNodeB 30, может быть получена путем определения конфигураций каждого пикоузла eNodeB 30, относящегося к узлу eNodeB 10-2.
3-1. Конфигурация узла eNodeB согласно второму варианту
Фиг. 13 представляет функциональную блок-схему, иллюстрирующую конфигурацию узла eNodeB 10-2 согласно второму варианту настоящего изобретения. Как показано на фиг. 13, узел eNodeB 10-2 согласно второму варианту настоящего изобретения содержит группу 104 антенн, модуль 110 обработки радиосигнала, цифроаналоговый/аналого-цифровой преобразователь 120, цифровой процессор 130, модуль 140 задания субкадра ABS, модуль 150 связи через интерфейс Х2, модуль 160 сохранения конфигурации, модуль 172 определения помех и модуль 180 сохранения информации о местонахождении. Поскольку конфигурации группы 104 антенн, модуля 110 обработки радиосигнала, цифроаналогового/аналого-цифрового преобразователя 120, цифрового процессора 130 и модуля 140 задания субкадра ABS являются такими же, как конфигурации, описанные применительно к первому варианту, подробное описание этих конфигураций здесь будет опущено.
Модуль сохранения информации о местонахождении
Модуль 180 сохранения информации о местонахождении сохраняет информацию о местонахождении пикоузла eNodeB 30 в аппаратуре узла eNodeB 10-2. Кроме того, информацию о местонахождении каждого пикоузла eNodeB 30 может быть задана вручную и может быть сообщена от пикоузла eNodeB 30.
Модуль определения помех
Модуль 172 определения помех выполняет в каждом пикоузле eNodeB 30 определение конфигурации для извещения на основе информации о местонахождении каждого пикоузла eNodeB 30, сохраняемой в модуле 180 сохранения информации о местонахождении, в дополнение к конфигурациям нескольких узлов eNodeB 10-2. В дальнейшем, этот момент будет описан более подробно со ссылками на фиг. 14.
Фиг. 14 представляет поясняющую схему, иллюстрирующую пример расположения узла eNodeB 10-2 и пикоузла eNodeB 30. В примере, показанном на фиг. 14, пикоузел eNodeB 30А расположен относительно близко к узлу eNodeB 10-2А, а пикоузел eNodeB 30В находится возле края ячейки, образованной узлом eNodeB 10-2А.
В таком случае, если местонахождение каждого пикоузла eNodeB 30 различно, статус защиты от помех каждого пикоузла eNodeB 30 различен, даже хотя сочетание конфигураций соответствующих узлов eNodeB 10-2 идентично. Например, пикоузел eNodeB 30А, расположенный относительно близко к узлу eNodeB 10-2А,. принимает меньше помех от соседствующих узлов eNodeB 10-2В и 10-2С. С другой стороны, ожидается, что пикоузел eNodeB 30В, расположенный относительно близко к краю ячейки узла eNodeB 10-2А, будет принимать относительно сильные помехи от соседствующих узлов eNodeB 10-2 В и 10-2С.
Поэтому, если имеется «неоднородный» субкадр, заданный в качестве субкадра ABS обслуживающим узлом eNodeB 10-2, но не заданный в качестве субкадра ABS соседствующими узлами eNodeB 10-2, модуль 172 определения помех согласно второму варианту определяет статус защиты от помех соответствующего субкадра на основе информации о местонахождении каждого пикоузла eNodeB 30.
В частности, когда пикоузел eNodeB 30 находится в пределах заданной дальности от обслуживающего узла eNodeB 10-2, модуль 172 определения помех может определить, что «неоднородный» субкадр является защищенным кадром. С другой стороны, когда пикоузел eNodeB 30 выходит за пределы заданной дальности от обслуживающего узла eNodeB 10-2, модуль 172 определения помех может определить, что «неоднородный» субкадр является незащищенным кадром.
Согласно такой конфигурации имеется некий критерий для определения, необходимо или нет добавлять конфигурацию, описывающую сочетание, содержащее частично защищенный кадр. Однако если пикоузел eNodeB 30 находится в пределах заданной дальности от обслуживающего узла eNodeB 10-2 или за пределами этой заданной дальности, модуль 172 определения помех может определить, что «неоднородный» субкадр является частично защищенным кадром.
3-2. Работа узла eNodeB согласно второму варианту
Выше была описана конфигурация узла eNodeB 10-2 согласно второму варианту настоящего изобретения. Далее, работа узла eNodeB 10-2 согласно второму варианту настоящего изобретения будет описана со ссылками фиг. 15.
Фиг. 15 представляет логическую схему, иллюстрирующую работу узла eNodeB 10-2 согласно второму варианту настоящего изобретения. Как показано на фиг. 15, сначала модуль 140 задания субкадров ABS в составе обслуживающего узла eNodeB 10-2 выбирает конфигурацию и задает субкадр ABS (S404), а модуль 150 связи через интерфейс Х2 принимает информацию о конфигурации соседствующего узла eNodeB 10-2 (S408). После этого, модуль 170 определения помех выполняет операции определения, указанные для этапов с S436 по S456, для каждого субкадра.
В частности, модуль 172 определения помех определяет, задан ли целевой субкадр в качестве субкадра ABS обслуживающим узлом eNodeB 10-2 (S436). Если целевой субкадр не задан в качестве субкадра ABS обслуживающим узлом eNodeB 10-2, модуль 172 определения помех определяет, что соответствующий субкадр является незащищенным кадром (S440).
С другой стороны, если целевой субкадр задан в качестве субкадра ABS обслуживающим узлом eNodeB 10-2, модуль 172 определения помех определяет, задан ли соответствующий субкадр в качестве субкадра ABS всеми соседствующими узлами eNodeB 10-2 (S444). Когда все соседствующие узлы eNodeB 10-2 задали соответствующий субкадр в качестве субкадра ABS, модуль 172 определения помех определяет, что соответствующий субкадр является защищенным кадром (S448).
Здесь, когда некоторые из соседствующих узлов eNodeB 10-2 не задали соответствующий субкадр в качестве субкадра ABS (S444), модуль 172 определения помех определяет, находится ли целевой пикоузел eNodeB 30 в пределах заданной дальности от обслуживающего узла eNodeB 10-2 (S452). Если целевой пикоузел eNodeB 30 находится в пределах заданной дальности от обслуживающего узла eNodeB 10-2, модуль 172 определения помех определяет, что соответствующий субкадр является защищенным кадром (S448), а если целевой пикоузел находится за пределами заданной дальности, модуль 172 определения помех определяет, что соответствующий субкадр является незащищенным кадром (S456).
После этого, модуль 172 определение помех специфицирует конфигурацию, соответствующую результатам определения статуса для каждого субкадра, а модуль 150 связи через интерфейс Х2 сообщает пикоузлу eNodeB 30 о специфицированной конфигурации (S460).
Как описано выше, согласно второму варианту настоящего изобретения конфигурация, подходящая для каждого пикоузла eNodeB 30, может быть получена путем определения конфигураций каждого пикоузла eNodeB 30 на основе информации о местонахождения каждого узла eNodeB 30.
3-3. Модифицированный пример
Кроме того, хотя приведенное выше описание дано для примера, в котором статус защиты от помех определен в зависимости от того, находится ли соответствующий пикоузел eNodeB 30 в пределах заданной дальности от обслуживающего узла eNodeB 10-2, рассматриваемый вариант этим примером не ограничивается. В качестве модифицированного примера модуль 172 определения помех может определить статус защиты от помех на основе расстояния между рассматриваемым пикоузлом eNodeB 30 и соседствующим узлом eNodeB 10-2.
В качестве одного из примеров рассматривается «неоднородный» субкадр, заданный в качестве субкадра ABS обслуживающим узлом eNodeB 10-2, но не заданный в качестве субкадра ABS соседствующим узлом eNodeB 10-2. В таком случае по мере уменьшения расстояния между пикоузлом eNodeB 30 и соседствующим узлом eNodeB 10-2 рассматриваемый пикоузел eNodeB 30, будет принимать все больше помех от указанного узла eNodeB 10-2 в соответствующем субкадре.
Поэтому, если расстояние между пикоузлом eNodeB 30 и соседствующим узлом eNodeB 10-2 меньше заданного расстояния, модуль 172 определения помех может определить, что «неоднородный» субкадр является незащищенным кадром. С другой стороны, если расстояние между пикоузлом eNodeB 30 и соседствующим узлом eNodeB 10-2 не меньше заданного расстояния, модуль 172 определения помех может определить, что «неоднородный» субкадр является защищенным кадром.
4. Третий вариант
Выше описан второй вариант настоящего изобретения. Далее будет описан третий вариант настоящего изобретения. Согласно третьему варианту настоящего изобретения, если перемешаны макроузлы eNodeB, задающие один и тот же субкадр в качестве субкадра ABS, и макроузлы eNodeB, не задающие один и тот же субкадр в качестве субкадра ABS, статус защиты от помех для соответствующего субкадра может быть определен не на стороне узла eNodeB 10, а на стороне пикоузла eNodeB 30.
4-1. Конфигурация пикоузла eNodeB
Фиг. 16 представляет поясняющую схему, иллюстрирующую конфигурацию пикоузла eNodeB 30 согласно третьему варианту настоящего изобретения. Как показано на фиг. 16, пикоузел eNodeB 30 согласно третьему варианту настоящего изобретения содержит группу 304 антенн, модуль 310 обработки радиосигнала, цифроаналоговый/аналого-цифровой преобразователь 320, цифровой процессор 330, модуль 350 связи через интерфейс Х2, модуль 360 сохранения конфигурации, модуль 370 определения помех, планировщик 380 и модуль 390 сохранения результатов измерений.
Группа антенн
Группа 304 антенн получает электрический высокочастотный сигнал путем приема радиосигнала от станции UE 20 и передает этот высокочастотный сигнал в модуль 310 обработки радиосигнала. Кроме того, группа 304 антенн передает радиосигнал в адрес абонентской станции UE 20 на основе высокочастотного сигнала, поступившего от модуля 110 обработки радиосигнала. Поскольку пикоузел eNodeB 30 содержит группу 304 антенн, имеющую несколько антенн, этот пикоузел eNodeB 30 может осуществлять связь в режиме «несколько входов-несколько выходов» (MIMO) или связь с разнесенным приемом/передачей.
Модуль обработки радиосигнала
Модуль 310 обработки радиосигнала преобразует высокочастотный сигнал, поступивший от группы 304 антенн, в сигнал видеодиапазона (сигнал восходящей линии) путем выполнения аналоговой обработки, такой как усиление, фильтрация и преобразование вниз по частоте. Кроме того, модуль 310 обработки радиосигнала преобразует сигнал видеодиапазона (сигнал нисходящей линии), поступающий от цифроаналогового/аналого-цифрового преобразователя 320, в высокочастотный сигнал.
Цифроаналоговый/аналого-цифровой преобразователь
Цифроаналоговый/аналого-цифровой преобразователь 320 преобразует сигнал восходящей линии в аналоговом формате, поступающий от модуля 310 обработки радиосигнала, в цифровой формат и передает преобразованный сигнал восходящей линии в цифровом формате цифровому процессору 330. Цифроаналоговый/аналого-цифровой преобразователь 320 преобразует сигнал нисходящей линии в цифровом формате, поступающий от цифрового процессора 330 обработки радиосигнала, в аналоговый формат и передает сигнал нисходящей линии в аналоговом формате модулю 310 обработки радиосигнала.
Цифровой процессор
Цифровой процессор 330 осуществляет цифровую обработку сигнала восходящей линии, поступающего от цифроаналогового/аналого-цифрового преобразователя 320, и выделяет сигнал управления, такой как сигнал физического канала управления восходящей линии (PUCCH), или данные абонента, такие как сигнал физического восходящего совместно используемого канала (PUSCH). Кроме того, цифровой процессор 330 генерирует сигнал нисходящей линии в цифровом формате для передачи от пикоузла eNodeB 30 и передает этот сигнал нисходящей линии цифроаналоговому/аналого-цифровому преобразователю 320. Цифровой процессор 330 работает в качестве модуля связи вместе с цифроаналоговым/аналого-цифровым преобразователем 320, модулем 310 обработки радиосигнала и группой 304 антенн.
Модуль связи через интерфейс Х2
Модуль 350 связи через интерфейс Х2 конфигурирован для осуществления связи с узлом eNodeB 10 через интерфейс Х2. Например, модуль 350 связи через интерфейс Х2 принимает сообщение с информацией о конфигурации, которая определяет сочетание частично защищенных кадров, от узла eNodeB 10, как это описано в первом варианте.
Модуль сохранения конфигурации
Модуль 360 сохранения конфигурации осуществляет сохранение информации о конфигурации, принятой от пикоузла eNodeB 30 посредством модуля 350 связи через интерфейс Х2. Станция UE 20 принимает информацию о конфигурации, передаваемую через группу 304 антенн, измеряет качество сигнала в соответствии с принятой конфигурацией и сообщает результаты измерений пикоузлу eNodeB 30.
Модуль сохранения результатов измерений
Модуль 390 сохранения результатов измерений осуществляет сохранение результатов измерений, поступивших от станции UE 20, как описано ниже. Кроме того, станция UE 20, выполнившая измерения, может быть одной из станций UE 20, относящихся к пикоузлу eNodeB 30, и может быть станцией UE 20, расположенной в области увеличенной дальности.
Модуль определения помех
Модуль 370 определения помех определяет на основе результатов измерений, полученных от станции UE 20, обращаться ли с каждым частично защищенным кадром, как с защищенным кадром, который защищен от помех, или как с незащищенным кадром, который принимает помехи. Этот момент будет описан позднее со ссылками на фиг. 18 и 19.
Планировщик
Планировщик 380 осуществляет планирование работы станции UE 20, относящейся к пикоузлу eNodeB 30, в соответствии с результатами определения, выполненного модулем 370 определения помех, и данными конфигурации, сохраненными в модуле 360 сохранения конфигурации. Например, планировщик 380 назначает только ресурсы связи с использованием защищенных кадров для станции UE 20, расположенной в области увеличенной дальности. В такой конфигурации можно предовратить прием помех от узла eNodeB 10 станцией UE 20, расположенной в области увеличенной дальности.
4-2. Конфигурация абонентской станции UE
Выше была описана конфигурация пикоузла eNodeB 30 согласно третьему варианту настоящего изобретения. Далее будет описана конфигурация абонентской станции UE 20 согласно третьему варианту настоящего изобретения.
Фиг. 17 представляет функциональную блок-схему, иллюстрирующую конфигурацию абонентской станции UE 20 согласно третьему варианту настоящего изобретения. Как показано на фиг. 17, абонентская станция UE 20 согласно третьему варианту настоящего изобретения содержит группу 204 антенн, модуль 210 обработки радиосигнала, цифроаналоговый/аналого-цифровой преобразователь 220, цифровой процессор 230, модуль 260 сохранения конфигурации и модуль 270 управления измерениями.
Группа антенн
Группа 204 антенн получает электрический высокочастотный сигнал путем приема радиосигнала от узла eNodeB 10 или от пикоузла eNodeB 30 и передает этот высокочастотный сигнал в модуль 210 обработки радиосигнала. Кроме того, группа 204 антенн передает радиосигнал в адрес узла eNodeB 10 или пикоузла eNodeB 30 на основе высокочастотного сигнала, поступившего от модуля 210 обработки радиосигнала. Поскольку станция UE 20 содержит группу 204 антенн, имеющую несколько антенн, эта станция UE 20 может осуществлять связь в режиме «несколько входов-несколько выходов» (MIMO) или связь с разнесенным приемом/передачей.
Модуль обработки радиосигнала
Модуль 210 обработки радиосигнала преобразует высокочастотный сигнал, поступивший от группы 204 антенн, в сигнал видеодиапазона (сигнал нисходящей линии) путем выполнения аналоговой обработки, такой как усиление, фильтрация и преобразование вниз по частоте. Кроме того, модуль 210 обработки радиосигнала преобразует сигнал видеодиапазона (сигнал восходящей линии), поступающий от цифроаналогового/аналого-цифрового преобразователя 220, в высокочастотный сигнал.
Цифроаналоговый/аналого-цифровой преобразователь
Цифроаналоговый/аналого-цифровой преобразователь 220 преобразует сигнал нисходящей линии в аналоговом формате, поступающий от модуля 210 обработки радиосигнала, в цифровой формат и передает преобразованный сигнал нисходящей линии в цифровом формате цифровому процессору 230. Кроме того, цифроаналоговый/аналого-цифровой преобразователь 220 преобразует сигнал восходящей линии в цифровом формате, поступающий от цифрового процессора 230 обработки радиосигнала, в аналоговый формат и передает сигнал восходящей линии в аналоговом формате модулю 210 обработки радиосигнала.
Цифровой процессор
Цифровой процессор 230 осуществляет цифровую обработку сигнала нисходящей линии, поступающего от цифроаналогового/аналого-цифрового преобразователя 220, и выделяет сигнал управления, такой как сигнал физического канала управления нисходящей линии (PDCCH), или данные абонента, такие как сигнал физического нисходящего совместно используемого канала (PDSCH). Кроме того, цифровой процессор 230 генерирует сигнал восходящей линии в цифровом формате для передачи от станции UE 20 и передает этот сигнал восходящей линии цифроаналоговому/аналого-цифровому преобразователю 220. Цифровой процессор 230 работает в качестве модуля связи вместе с цифроаналоговым/аналого-цифровым преобразователем 220, модулем 210 обработки радиосигнала и группой 204 антенн.
Модуль сохранения конфигурации
Модуль 260 сохранения конфигурации осуществляет сохранение информации о конфигурации, принятой от пикоузла eNodeB 30. Кроме того, информация о конфигурации представляет, является ли каждый субкадр защищенным кадром (ABS), незащищенным кадром (не ABS) или частично защищенным кадром.
Модуль управления измерениями
Модуль 270 управления измерениями осуществляет управление измерениями качества сигнала в соответствии с конфигурацией, сохраняемой в модуле 260 сохранения конфигурации, и управляет передачей сообщения с результатами измерений пикоузлу eNodeB 30. Далее, измерения качества сигнала будут описаны подробно.
4-3. Измерение качества сигнала
Если субкадр, определяемый конфигурацией, является субкадром какого-либо из двух типов, а именно защищенным кадром или незащищенным кадром, станция UE 20 выполняет измерения двух видов. Другими словами, модуль 270 управления измерениями усредняет результаты измерений для нескольких защищенных кадров, усредняет результаты измерений для нескольких незащищенных кадров и сообщает среднюю величину для защищенных кадров и среднюю величину для незащищенных кадров пикоузлу eNodeB 30 в качестве результата измерений.
С другой стороны, поскольку каждый из частично защищенных кадров считается отличным от других по уровню помех в сочетании узлов eNodeB 10, задающих субкадры ABS, усреднение результатов измерений всех частично защищенных кадров не является оптимальным. Поэтому модуль 270 управления измерениями может независимо измерять каждый из частично защищенных кадров. Другими словами, модуль 270 управления измерениями может сообщать результат измерений для каждого частично защищенного кадра пикоузлу eNodeB 30 без усреднения результатов измерений этих частично защищенных кадров. В дальнейшем, этот момент будет описан более подробно со ссылками на фиг. 18.
Фиг. 18 представляет поясняющую схему, иллюстрирующую конкретный пример измерения качества сигнала согласно третьему варианту настоящего изобретения. Как показано на фиг. 18, станция UE 20 выполняет измерения для субкадров #2, #6 и #10, которые являются защищенными кадрами (с А-1 по А-3), и сообщает среднюю величину результатов измерений в качестве результата измерений защищенных кадров. Кроме того, станция UE 20 выполняет измерения для субкадров #1, #5 и #9, которые являются незащищенными кадрами (с В-1 по В-3), и сообщает среднюю величину результатов измерений в качестве результата измерений незащищенных кадров.
С другой стороны, субкадры #3, #4 и #7, которые являются частично защищенными кадрами, измеряют независимо. Другими словами, станция UE 20 выполняет измерения в субкадре #3, который является частично защищенным кадром (С), и сообщает о результате измерений без усреднения с результатами измерений других частично защищенных кадров. Кроме того, станция UE 20 может усреднить результат измерения субкадра #3 с результатами измерений других субкадров, периоды которых отличаются от периода субкадра #3 (например, субкадра #1 в следующем радио кадре), даже если этот субкадр является другим частично защищенным кадром.
Кроме того, станция UE 20 выполняет измерения в субкадре #4, который является частично защищенным кадром (D), и сообщает о результате измерений без усреднения с результатами измерений других частично защищенных кадров. Кроме того, станция UE 20 выполняет измерения в субкадре #7, который является частично защищенным кадром (Е), и сообщает о результате измерений без усреднения с результатами измерений других частично защищенных кадров. Аналогично, станция UE 20 выполняет измерения в субкадре #8, который является частично защищенным кадром (F), и сообщает о результате измерений без усреднения с результатами измерений других частично защищенных кадров.
Поскольку пикоузел eNodeB 30 принимает отчет о результатах измерений от станции UE 20 для каждого частично защищенного кадра, как описано выше, пикоузел eNodeB 30 может должным образом определить, обращаться ли с рассматриваемым частично защищенным кадром, как с защищенным кадром или как с незащищенным кадром.
Пример применения
Хотя выше в качестве примера применения был описан пример, в котором независимо измеряют каждый из всех частично защищенных кадров, даже когда субкадры представляют собой частично защищенные кадры, занимающие другие позиции в кадре, с этими частично защищенными кадрами можно обращаться как с группой, если сочетания узлов eNodeB 10, задающих субкадры ABS, являются идентичными. В дальнейшем этот пример применения будет описан со ссылками на фиг. 19.
Фиг. 19 представляет поясняющую схему, иллюстрирующую пример применения измерений качества сигнала. Более конкретно, фиг. 19 иллюстрирует пример, в котором обслуживающий узел eNodeB 10A задал конфигурацию 2, а соседствующие узлы eNodeB 10В и 10С задали конфигурации 3 и 4, соответственно, и в результате пикоузел eNodeB 30 извещен обслуживающим узлом eNodeB 10A о конфигурации Y.
Здесь, в конфигурации Y, хотя субкадры #3, #4, #7 и #8 являются частично защищенными кадрами, тот же узел eNodeB 10В задает субкадры #3 и #7 в качестве субкадров ABS, а те же узлы eNodeB 10А и 10В задают субкадры #4 и #8 в качестве субкадров ABS. По этой причине, считается, что статусы защиты от помех субкадров #3 и #7, являются аналогичными, и статусы защиты от помех субкадров #4 и #8, также являются аналогичными.
По этой причине, станция UE 20 может выполнить измерения субкадров #3 и #7 (С-1, С-2) и сообщить среднюю величину результатов измерений в качестве результата измерений группы, содержащей эти субкадры #3 и #7. Аналогично, станция UE 20 может выполнить измерения субкадров #4 и #8 (D-1, D-2) и сообщить среднюю величину результатов измерений в качестве результата измерений группы, содержащей эти субкадры #4 и #8.
Кроме того, обслуживающий узел eNodeB 10 может группировать частично защищенные кадры таким образом, что частично защищенные кадры, заданные в качестве субкадров ABS узлом eNodeB 10 по одной и той же схеме, составляют одну и ту же группу, и передавать отчет о результатах группирования пикоузлу eNodeB 30 посредством, например, сигнализации RRC (управление радио ресурсами). Посредством сообщения результатов группирования частично защищенных кадров в адрес станции UE 20 пикоузел eNodeB 30 может получить и сообщить результаты измерений каждой группы, как описано выше.
4-4. Работа системы связи
Далее, работа системы связи согласно третьему варианту настоящего изобретения будет описана со ссылками на фиг. 20.
Фиг. 20 представляет схему последовательности операций, иллюстрирующую работу системы связи согласно третьему варианту настоящего изобретения. Как показано на фиг. 20, сначала, когда узел eNodeB 10, например, специфицирует конфигурацию посредством модуля 170 определения помех, рассмотренного в первом варианте, этот узел eNodeB 10 сообщает пикоузлу eNodeB 30 информацию о специфицированной им конфигурации (S510). Пикоузел eNodeB 30 извещает станцию UE 20 о конфигурации, принятой от узла eNodeB 10 (S520).
После этого, станция UE 20 получает результаты измерениями качества сигнала для каждого из частично защищенных кадров, определяемых сообщенной ей конфигурацией (S530), и сообщает эти результаты измерений пикоузлу eNodeB 30 (S540).
После этого модуль 370 определения помех в составе пикоузла eNodeB 30 определяет, обращаться ли с каждым частично защищенным кадром, как с защищенным кадром или как с незащищенным кадромна основе сообщенных этому узлу результатов измерений (S550). Планировщик 380 в составе пикоузла eNodeB 30 осуществляет планирование работы станции UE 20, относящейся к этому пикоузлу eNodeB 30, в соответствии с результатами определения, выполненного модулем 370 определения помех (S560).
5. Заключение
Как описано выше, согласно первому варианту настоящего изобретения узел eNodeB 30 может должным образом проверять статус защиты от помех каждого субкадра на основе одной конфигурации, сообщенной от обслуживающего узла eNodeB 10, без извещения этого пикоузла eNodeB 30 о нескольких конфигурациях от нескольких узлов eNodeB 10. Кроме того, модуль 140 задания субкадра ABS в составе каждого из нескольких соседствующих узлов eNodeB 10 задает одну и ту же конфигурацию для сектора, ориентированного по направлению к центру совокупности нескольких соседствующих узлов eNodeB 10. Таким способом можно улучшить пропускную способность пикоузла eNodeB 30.
Кроме того, согласно второму варианту настоящего изобретения конфигурация, подходящая для каждого пикоузла eNodeB 30, может быть получена путем определения конфигураций каждого пикоузла eNodeB 30, расположенного в пределах ячейки узла eNodeB 10-2.
Также, согласно третьему варианту настоящего изобретения, если перемешаны макроузлы eNodeB, задающие один и тот же субкадр в качестве субкадра ABS, и макроузлы eNodeB, не задающие один и тот же субкадр в качестве субкадра ABS, статус защиты от помех для соответствующего субкадра может быть определен не на стороне узла eNodeB 10, а на стороне пикоузла eNodeB 30.
Специалисту в рассматриваемой области должно быть понятно, что возможны разнообразные модификации, сочетания и изменения в зависимости от конкретных технических требований к проектированию и других факторов до тех пор, пока такие изменения и модификации остаются в пределах объема прилагаемой Формулы изобретения или ее эквивалентов.
Например, согласно настоящему описанию каждый этап обработки сигнала, выполняемой узлом eNodeB 10 и станцией UE 30, не обязательно следует выполнять во временной последовательности и в порядке, показанном на диаграмме последовательности или на логической схеме. Например, каждый этап обработки сигнала, осуществляемой узлом eNodeB 10 и пикоузлом eNodeB 30, может быть выполнен в порядке, отличном от порядка, показанного на логической схеме, или этапы могут быть выполнены параллельно.
Кроме того, с использованием встроенного оборудования, такого как центральный процессор CPU, постоянное запоминающее устройство (ПЗУ) ROM и запоминающее устройство с произвольной выборкой (ЗУПВ) RAM, узел eNodeB 10, абонентская станция UE 20 и пикозузел eNodeB 30 могут быть реализованы посредством компьютерной программы, способной выполнять такие же функции, как соответствующие конфигурации узла eNodeB 10, станции UE 20 и пикоузла eNodeB 30. Кроме того, предложен носитель записи, на котором хранится указанная компьютерная программа.
В дополнение к этому, настоящая технология может быть также конфигурирована, как указано ниже.
(1) Базовая станция, содержащая:
модуль установки, выполненный с возможностью установки кадра с ограниченной передачей, в котором ограничены все передачи, отличные от передачи опорного сигнала, среди кадров связи;
модуль приема информации установки, выполненный с возможностью приема информации установки кадра с ограниченной передачей от соседней базовой станции; и
модуль определения помех, выполненный с возможностью определения статуса защиты от помех для каждого кадра связи в соте, создаваемой указанной базовой станцией, на основе кадра с ограниченной передачей, установленного модулем установки, и кадра с ограниченной передачей от соседней базовой станции.
(2) Базовая станция согласно (1), в которой модуль определения определяет, что кадр связи, установленный в качестве кадра с ограниченной передачей указанной базовой станцией или соседней базовой станцией, является защищенным кадром, и определяет кадр связи, не установленный в качестве кадра с ограниченной передачей ни указанной базовой станцией, ни соседней базовой станцией, является незащищенным кадром.
(3) Базовая станция согласно (1) или (2), в которой модуль определения определяет, что кадр связи, установленный в качестве кадра с ограниченной передачей указанной базовой станцией, является частично защищенным кадром, если имеется соседняя базовая станция, не установившая кадр связи в качестве кадра с ограниченной передачей.
(4) Базовая станция согласно (1) или (2), в которой модуль определения определяет, что кадр связи, установленный в качестве кадра с ограниченной передачей рассматриваемой базовой станцией или соседней базовой станцией, является частично защищенным кадром, если одна базовая станция из указанной базовой станции или соседней базовой станции, не установила указанный кадр связи в качестве кадра с ограниченной передачей.
(5) Базовая станция согласно (1) или (2), в которой модуль определения определяет статус защиты от помех для неоднородного кадра связи, установленного в качестве кадра с ограниченной передачей рассматриваемой базовой станцией и не установленного в качестве кадра с ограниченной передачей соседней базовой станцией, на основе информации о местонахождении маломощной базовой станции, передающая мощность которой ниже передающей мощности указанной базовой станции и которая располагается внутри соты указанной базовой станции.
(6) Базовая станция согласно (5), в которой модуль определения определяет, что неоднородный кадр связи является защищенным кадром, если маломощная базовая станция находится в пределах заданной дальности от указанной базовой станции.
(7) Базовая станция согласно (5) или (6), в которой модуль определения определяет, что неоднородный кадр связи является незащищенным кадром или частично защищенным кадром, если маломощная базовая станция находится за пределами заданной дальности от указанной базовой станции.
(8) Базовая станция по любому из (1)-(7), дополнительно содержащая модуль извещения, выполненный с возможностью извещения маломощной базовой станции, передающая мощность которой ниже мощности передач указанной базовой станции и которая расположена внутри соты указанной базовой станции, о результате определения, выполненного модулем определения.
(9) Способ связи, содержащий этапы, на которых:
устанавливают кадр с ограниченной передачей, в котором ограничены все передачи, отличные от передачи опорного сигнала, среди кадров связи;
принимают информацию задания кадра с ограниченной передачей от соседней базовой станции; и
определяют статус защиты от помех для каждого кадра связи в соте, образованной указанной базовой станцией, на основе кадра с ограниченной передачей, заданного указанной базовой станцией, и кадра с ограниченной передачей от соседней базовой станции.
(10) Программа, вызывающая функционирование компьютера в качестве:
модуля установки, выполненного с возможностью установки кадра с ограниченной передачей, в котором ограничены все передачи базовой станции, отличные от передачи опорного сигнала, среди кадров связи;
модуля приема информации установки, выполненного с возможностью приема информации установки кадра с ограниченной передачей от соседней базовой станции; и
модуля определения помех, выполненного с возможностью определения статуса защиты от помех для каждого кадра связи в соте, образованной указанной базовой станцией, на основе кадра с ограниченной передачей, установленного модулем установки, и кадра с ограниченной передачей от соседней базовой станции.
(А1) Способ, содержащий этапы, на которых:
посредством процессора базовой станции определяют статус защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации базовых станций, причем первая из указанных конфигураций отличается по меньшей мере от второй из указанных конфигураций, при этом часть информации, указывающую вторую из указанных конфигураций, принимают от второй базовой станции.
(А2) Способ согласно (А1), в котором первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа.
(A3) Способ согласно (А2), в котором кадр первого типа представляет собой кадр с ограниченной передачей, в котором ограничены все передачи, отличные от опорного сигнала.
(А4) Способ согласно (А2), в котором кадр первого типа представляет собой почти пустой субкадр (Almost Blank Subframe (ABS)).
(A5) Способ согласно (А2), дополнительно содержащий этап, на котором передают, посредством модуля связи статус защиты от помех для кадра устройству управления связью.
(А6) Способ согласно (А5), в котором на этапе определения статуса защиты от помех:
определяют, что статус защиты от помех для кадра является незащищенным статусом, если указанная первая конфигурация не связывает указанный кадр с кадром первого типа;
определяют, что статус защиты от помех для кадра является защищенным статусом, если каждая из конфигураций связывает указанный кадр с кадром первого типа; и
определяют, что статус защиты от помех для кадра является частично защищенным статусом, если указанная первая конфигурация связывает указанный кадр с кадром первого типа, а по меньшей мере одна из других конфигураций не связывает указанный кадр с кадром первого типа.
(А7) Способ согласно (А5), в котором на этапе определения статуса защиты от помех:
определяют, что статус защиты от помех для кадра является защищенным статусом, если каждая из конфигураций связывает указанный кадр с кадром первого типа;
определяют, что статус защиты от помех для кадра является частично защищенным статусом, если по меньшей мере одна из указанных конфигураций связывает указанный кадр с кадром первого типа, а по меньшей мере одна другая из указанных конфигураций не связывает указанный кадр с кадром первого типа; и
определяют, что статус защиты от помех является незащищенным кадром, если ни одна из конфигураций не связывает указанный кадр с кадром первого типа;
(А8) Способ согласно (А5), в котором определение статуса защиты от помех для кадра для устройства управления связью дополнительно основано, по меньшей мере частично, на местонахождении устройства управления связью.
(А9) Способ согласно (А8), в котором на этапе определения статуса защиты от помех для кадра для устройства управления связью на основе, по меньшей мере частично, местонахождения устройства управления связью определяют статус защиты от помех для кадра на основе, по меньшей мере частично, того, находится ли устройство управления связью в пределах заданного расстояния от базовой станции.
(А10) Способ согласно (А9) в котором устройство управления связью расположено в пределах соты указанной базовой станции.
(А11) Способ согласно (А8), в котором на этапе определения статуса защиты от помех:
определяют, что статус защиты от помех для кадра является незащищенным статусом, если указанная первая конфигурация не связывает указанный кадр с кадром первого типа;
определяют, что статус защиты от помех для кадра является защищенным статусом, если каждая из указанных конфигураций связывает указанный кадр с кадром первого типа или если первая конфигурация связывает указанный кадр с кадром первого типа и устройство управления связью расположено в пределах дальности связи первой из базовых станций; и
определяют, что статус защиты от помех для кадра является незащищенным статусом, если первая конфигурация связывает указанный кадр с кадром первого типа, по меньшей мере одна другая конфигурация не связывает указанный кадр с кадром первого типа и устройство управления связью не расположено в пределах дальности связи первой из базовых станций,
причем указанная первая конфигурация является конфигурацией первой базовой станции.
(А12) Способ согласно (А5), в котором:
указанная первая конфигурация является конфигурацией первой базовой станции,
указанная вторая конфигурация является конфигурацией второй базовой станции, и
указанная базовая станция принимает часть информации, указывающую вторую конфигурацию.
(А13) Способ согласно (А5), в котором множество конфигураций множества базовых станций совпадают друг с другом, причем указанное множество конфигураций соответствуют одной или более сотам, расположенным центрально относительно множества базовых станций.
(А14) Способ согласно (А1), дополнительно содержащий этап, на котором связывают статус защиты от помех с указанным кадром.
(А15) Способ согласно (А1), в котором указанный кадр представляет собой субкадр радиокадра.
(А16) Базовая станция, содержащая:
модуль определения помех, выполненный с возможностью определения статуса защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации двух или более базовых станций, причем первая из указанных конфигураций отличается по меньшей мере от второй из указанных конфигураций, при этом часть информации, указывающая вторую из конфигураций, принимается от второй базовой станции.
(А17) Базовая станция согласно (А16), в которой модуль определения помех выполнен с возможностью определения статуса защиты от помех для кадра посредством:
определения, что статус защиты от помех для кадра является незащищенным статусом, если указанная первая конфигурация не связывает указанный кадр с кадром первого типа;
определения, что статус защиты от помех для кадра является защищенным статусом, если каждая из конфигураций связывает указанный кадр с кадром первого типа; и
определения, что статус защиты от помех для кадра является частично защищенным статусом, если указанная первая конфигурация связывает указанный кадр с кадром первого типа, а по меньшей мере одна из других конфигураций не связывает указанный кадр с кадром первого типа.
(А18) Базовая станция согласно (А 17), дополнительно содержащая:
модуль связи, выполненный с возможностью передачи статуса защиты от помех для кадра устройству управления связью; и
модуль связывания, выполненный с возможностью связывания статуса защиты от помех с указанным кадром,
при этом первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа,
причем кадр первого типа представляет собой почти пустой субкадр (Almost Blank Subframe (ABS)).
(A19) Базовая станция согласно (А16), в которой модуль определения помех выполнен с возможностью определения статуса защиты от помех для кадра посредством:
определения, что статус защиты от помех для кадра является защищенным статусом, если каждая из конфигураций связывает указанный кадр с кадром первого типа;
определения, что статус защиты от помех для кадра является частично защищенным статусом, если по меньшей мере одна из указанных конфигураций связывает указанный кадр с кадром первого типа, а по меньшей мере одна другая из указанных конфигураций не связывает указанный кадр с кадром первого типа; и
определения, что статус защиты от помех для кадра является незащищенным статусом, если ни одна из конфигураций не связывает указанный кадр с кадром первого типа;
(А20) Базовая станция согласно (А19), дополнительно содержащая:
модуль связи, выполненный с возможностью передачи статуса защиты от помех для кадра устройству управления связью; и
модуль связывания, выполненный с возможностью связывания статуса защиты от помех с указанным кадром,
при этом первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа,
причем кадр первого типа представляет собой почти пустой субкадр (Almost Blank Subframe (ABS)).
(А21) Базовая станция согласно (А16), в которой модуль определения помех дополнительно выполнен с возможностью определения статуса защиты от помех для кадра на основе, по меньшей мере частично, местонахождения устройства управления связью.
(А22) Базовая станция согласно (А21), дополнительно содержащая:
модуль связи, выполненный с возможностью передачи статуса защиты от помех для кадра устройству управления связью; и
модуль связывания, выполненный с возможностью связывания статуса защиты от помех с указанным кадром,
при этом первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа,
причем кадр первого типа представляет собой почти пустой субкадр (Almost Blank Subframe (ABS)).
(A23) Базовая станция согласно (А16), в которой:
указанная первая конфигурация является конфигурацией указанной базовой станции,
указанная вторая конфигурация является конфигурацией второй базовой станции, и
рассматриваемая базовая станция выполнена с возможностью принимать часть информации, указьшающую вторую конфигурацию.
(А24) Машиночитаемый носитель записи с записанной на нем компьютерной программой, которая при ее исполнении по меньшей мере одним процессором, выполняет способ, содержащий этап, на котором
определяют статус защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации базовых станций, при этом первая из указанных конфигураций отличается по меньшей мере от второй из указанных конфигураций, причем часть информации, указывающей вторую из конфигураций, принимают от второй базовой станции.
(А25) Машиночитаемый носитель записи согласно (А24), в котором первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа.
(А26) Машиночитаемый носитель записи согласно (А25), в котором способ дополнительно содержит этап, на котором передают, посредством модуля связи, статус защиты от помех для кадра устройству управления связью.
(А27) Система беспроводной связи, содержащая:
первую базовую станцию, включающую в себя модуль определения помех; и
вторую базовую станцию,
при этом:
первая базовая станция выполнена с возможностью хранения информации, указывающей первую конфигурацию,
вторая базовая станция выполнена с возможностью хранения информации, указывающей вторую конфигурацию,
модуль определения помех первой базовой станции выполнен с возможностью определения статуса защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей первую конфигурацию первой базовой станции, и информации, указывающей вторую конфигурацию второй базовой станции, и
первая конфигурация отличается от второй конфигурации.
(А28) Система согласно (А27), в которой первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа.
(А29) Система согласно (А27), дополнительно содержащая третью базовую станцию, при этом:
первая, вторая и третья базовые станции выполнены с возможностью хранения информации, указывающей третью конфигурацию,
указанная третья конфигурация соответствует соте, центрально расположенной относительно первой, второй и третьей базовых станций, и
каждая из первой, второй и третьей базовых станций выполнена с возможностью передачи сигналов в соте в соответствии с третьей конфигурациией,
Список позиционных обозначений
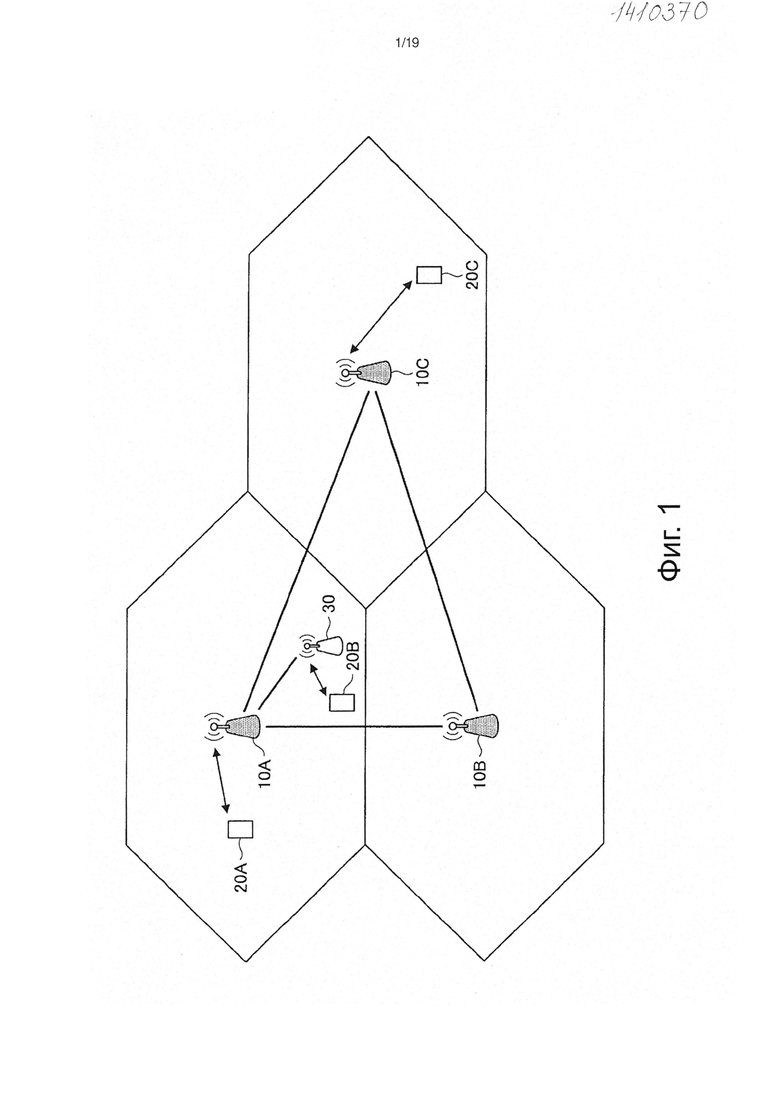
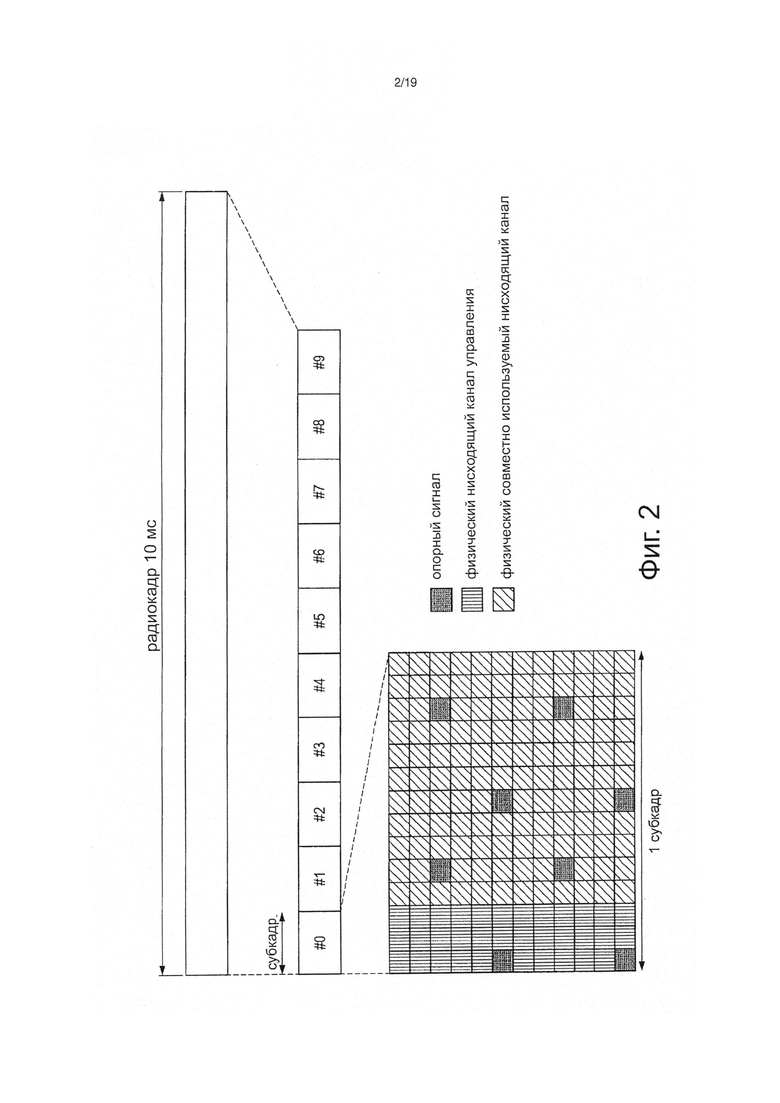
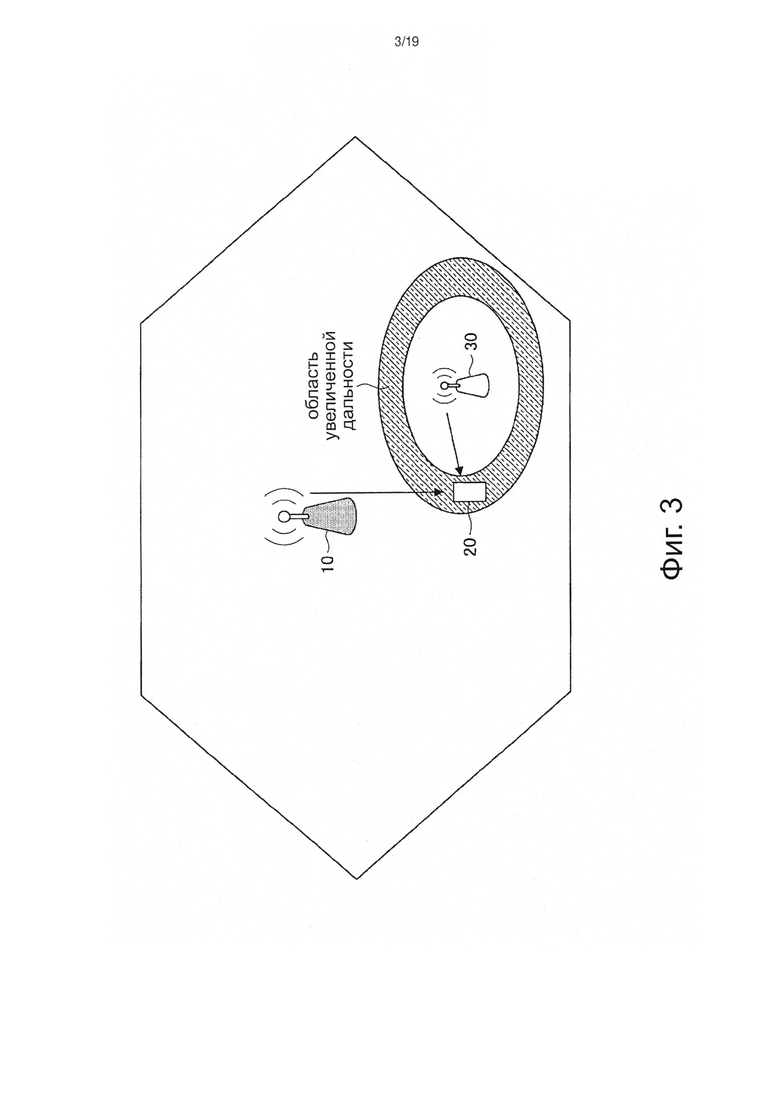
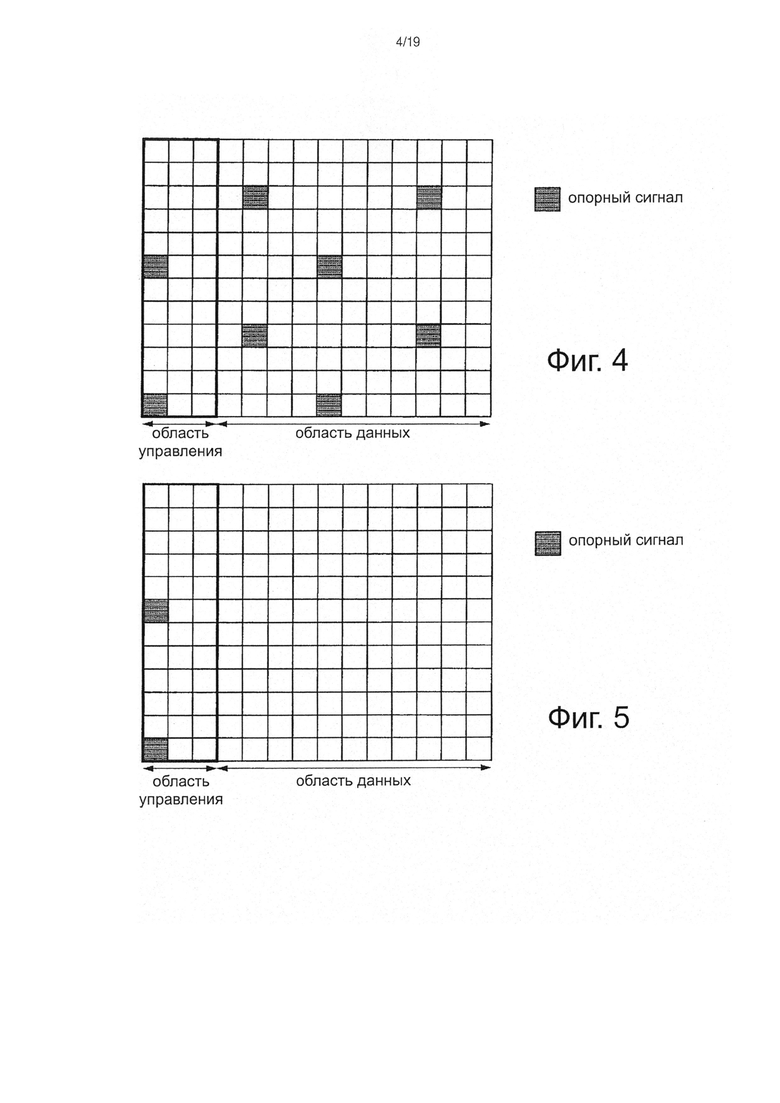
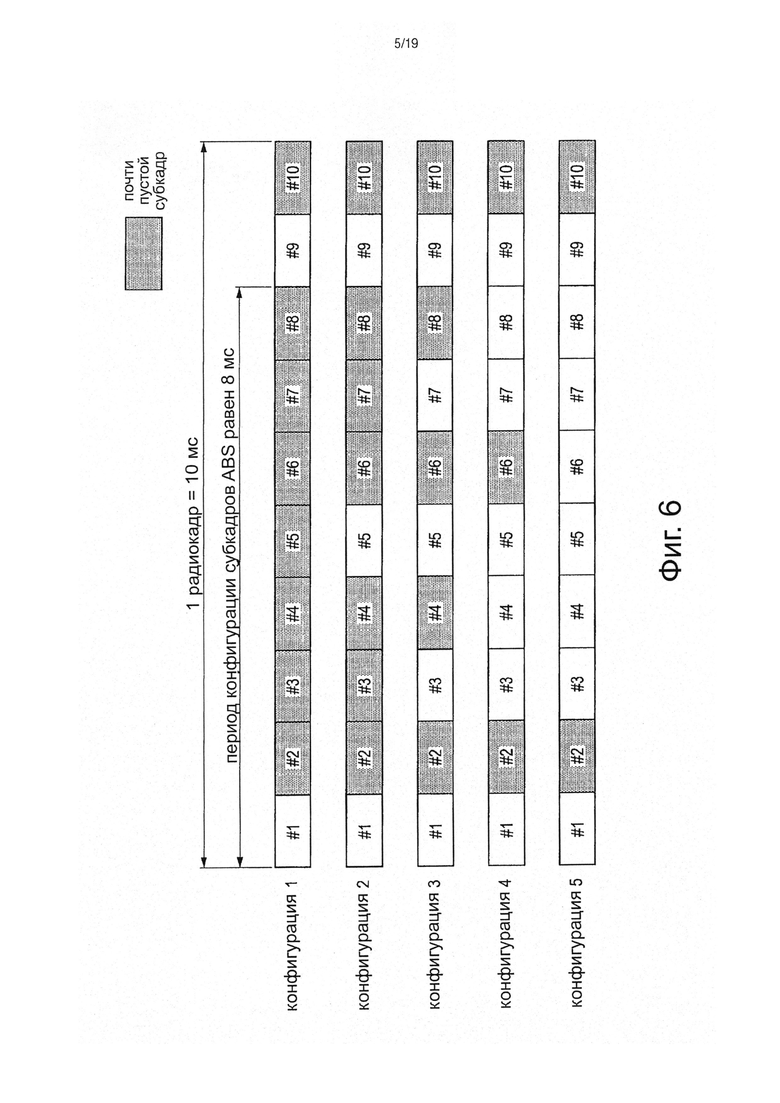
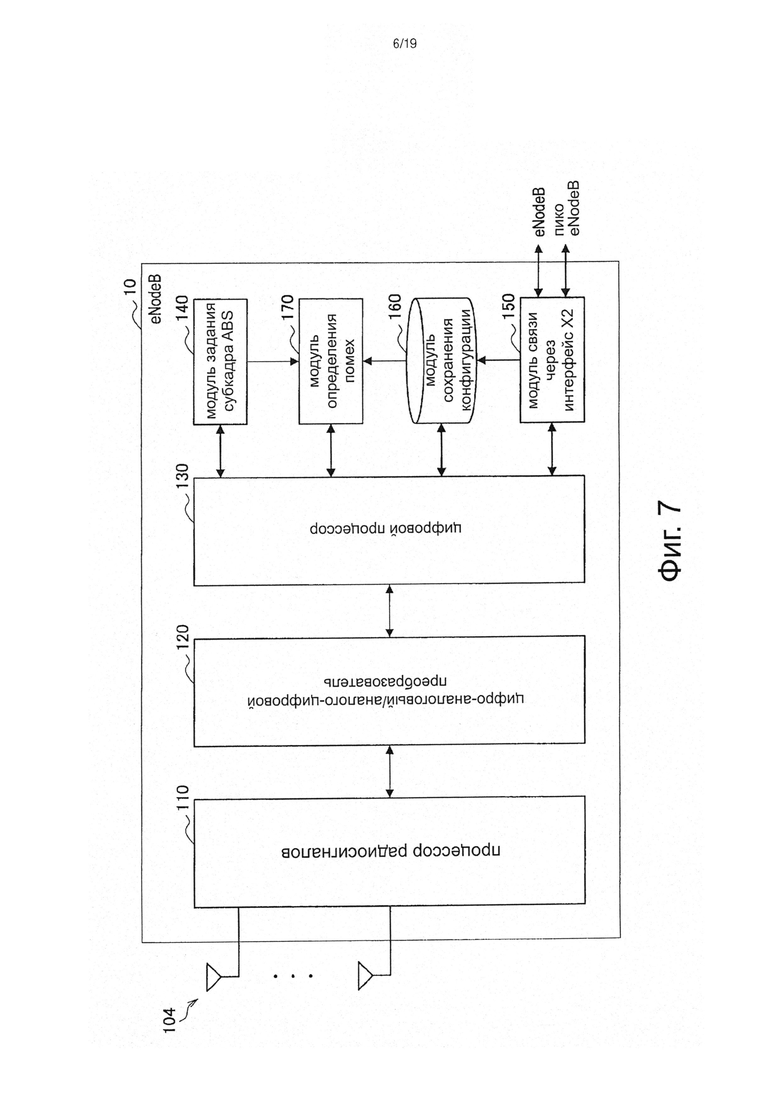
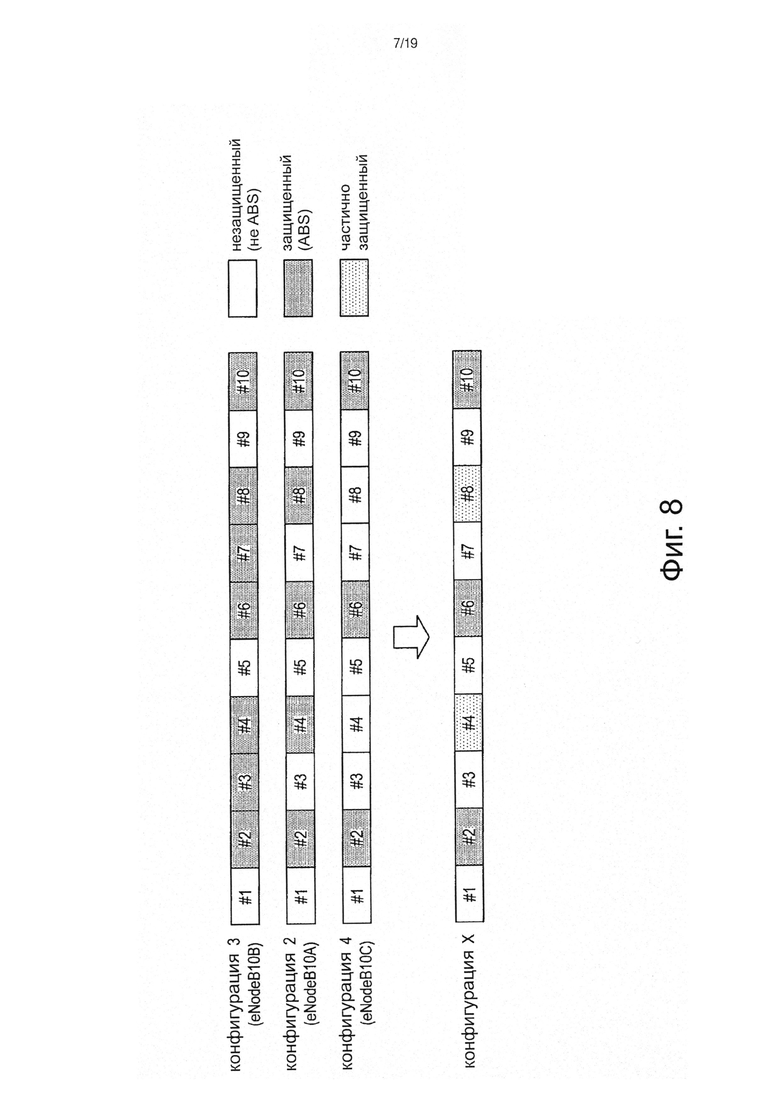
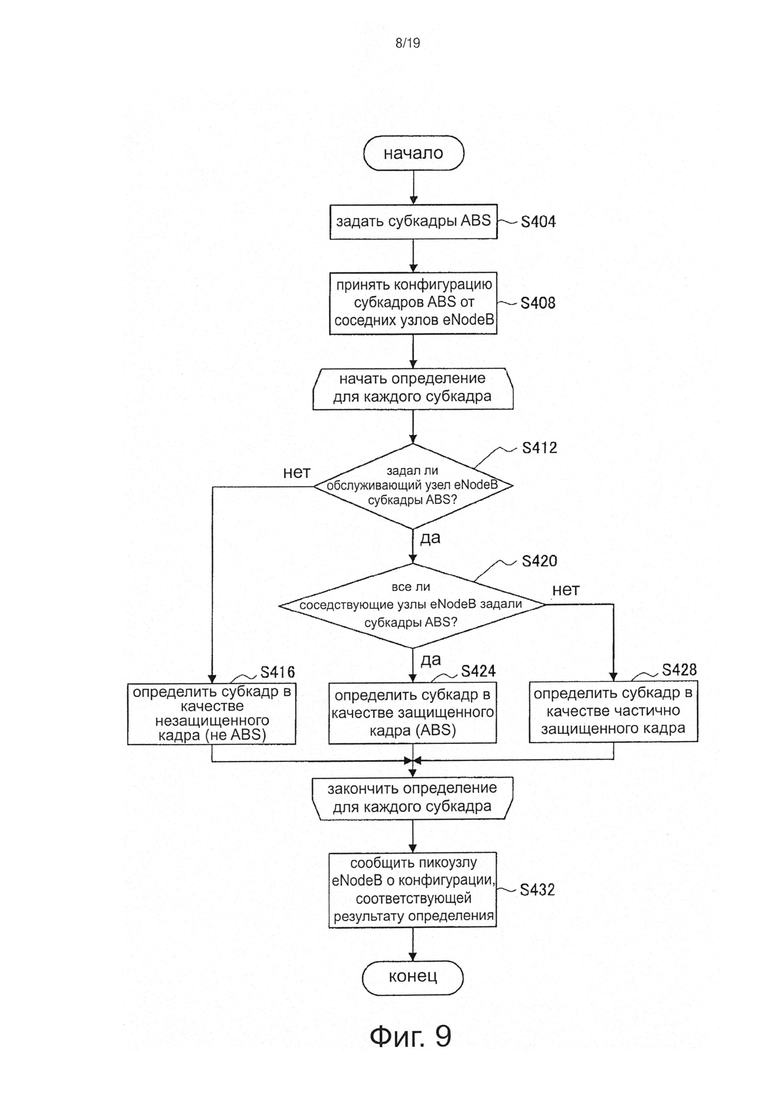
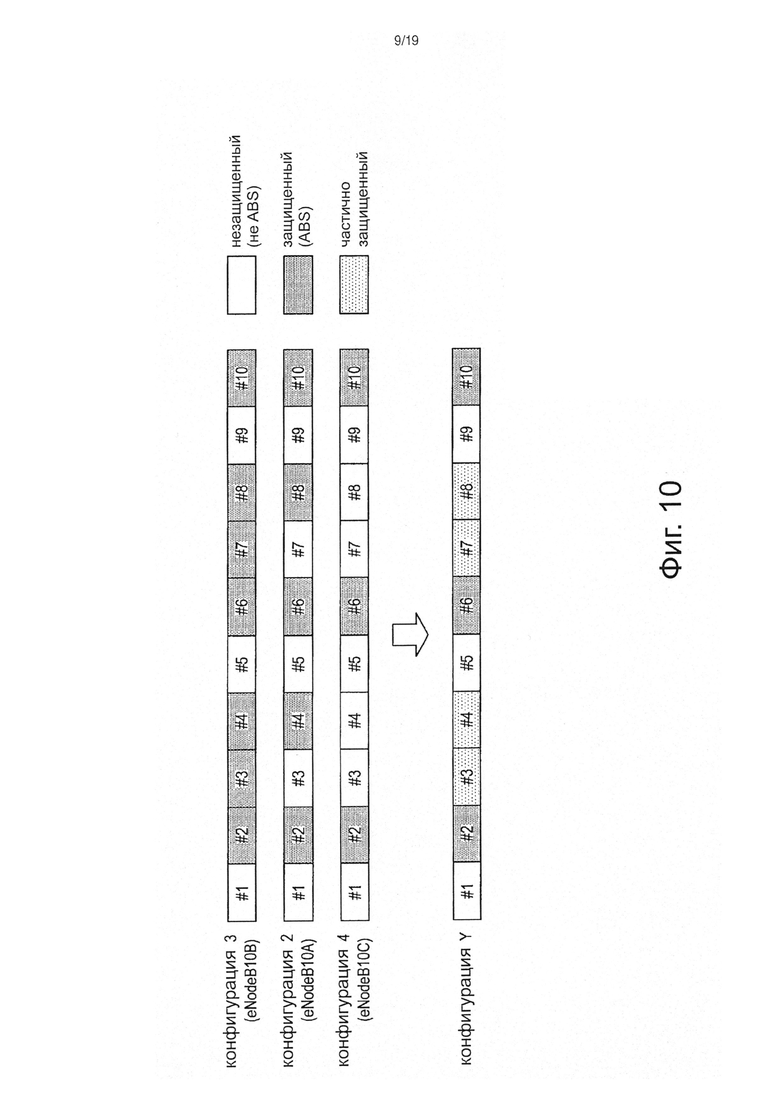
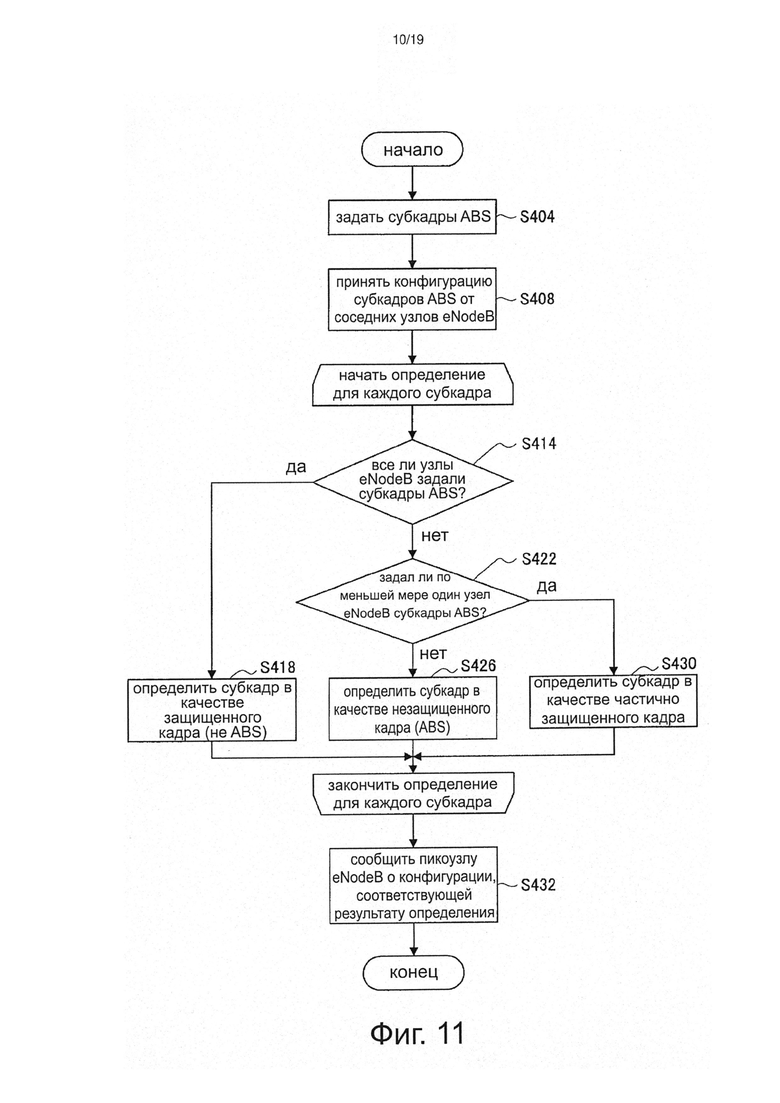
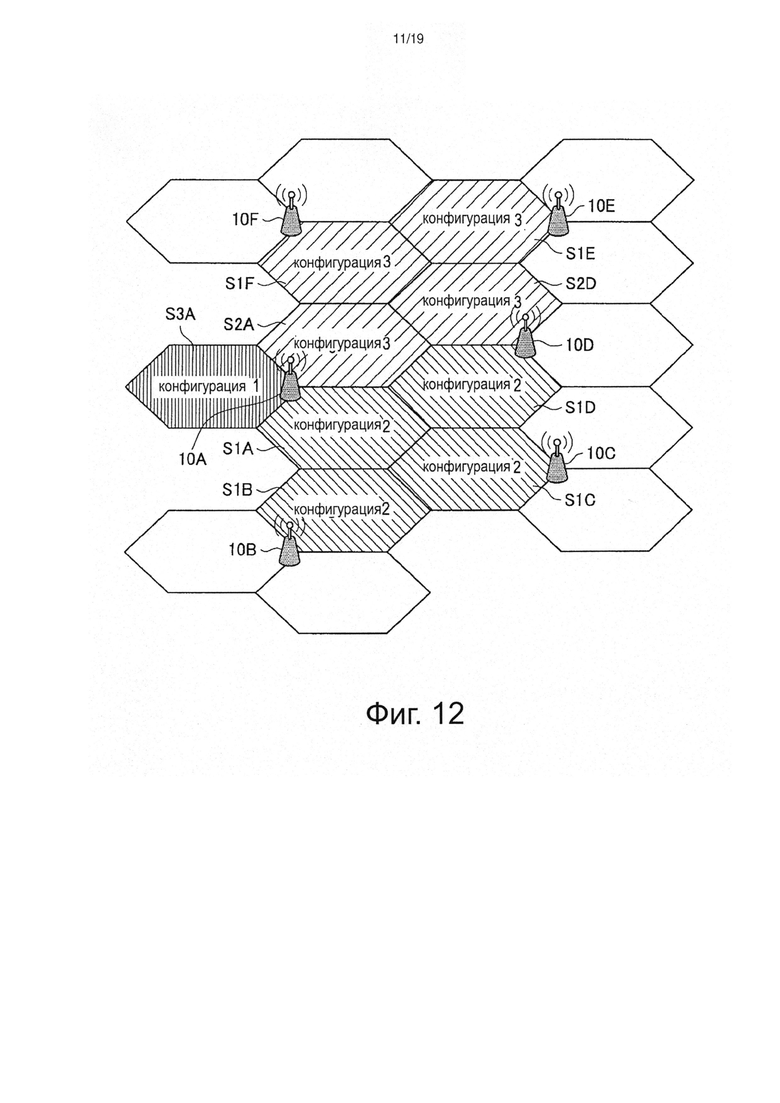
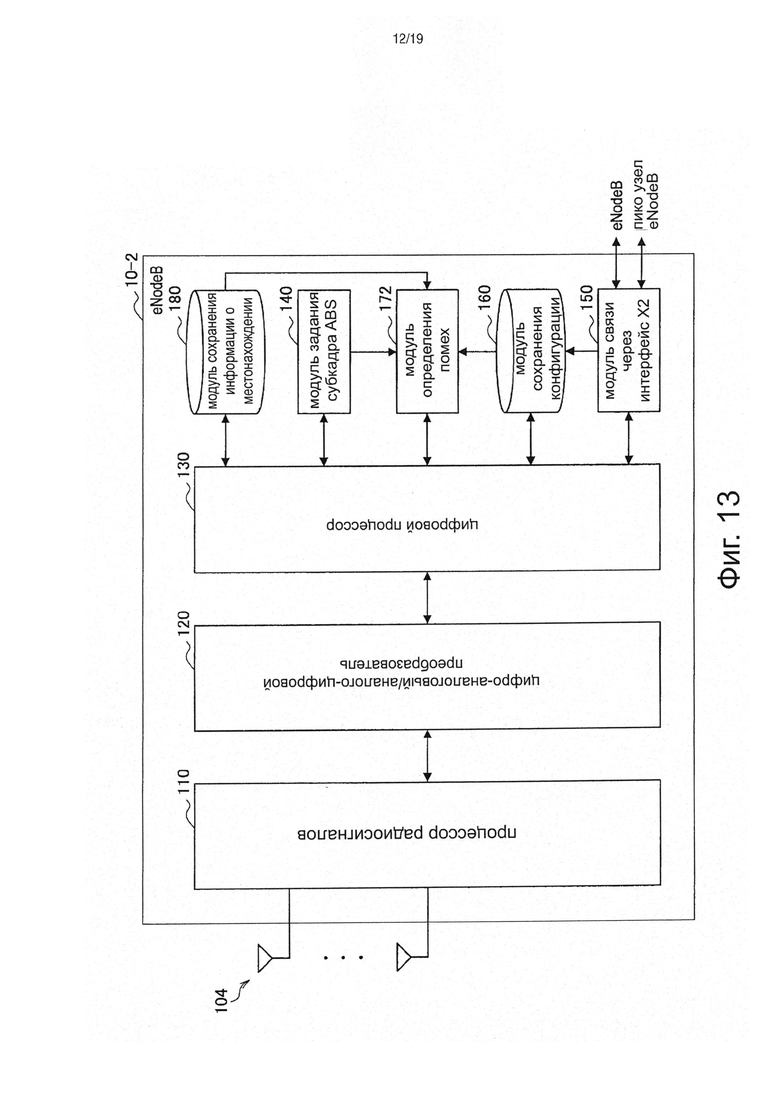
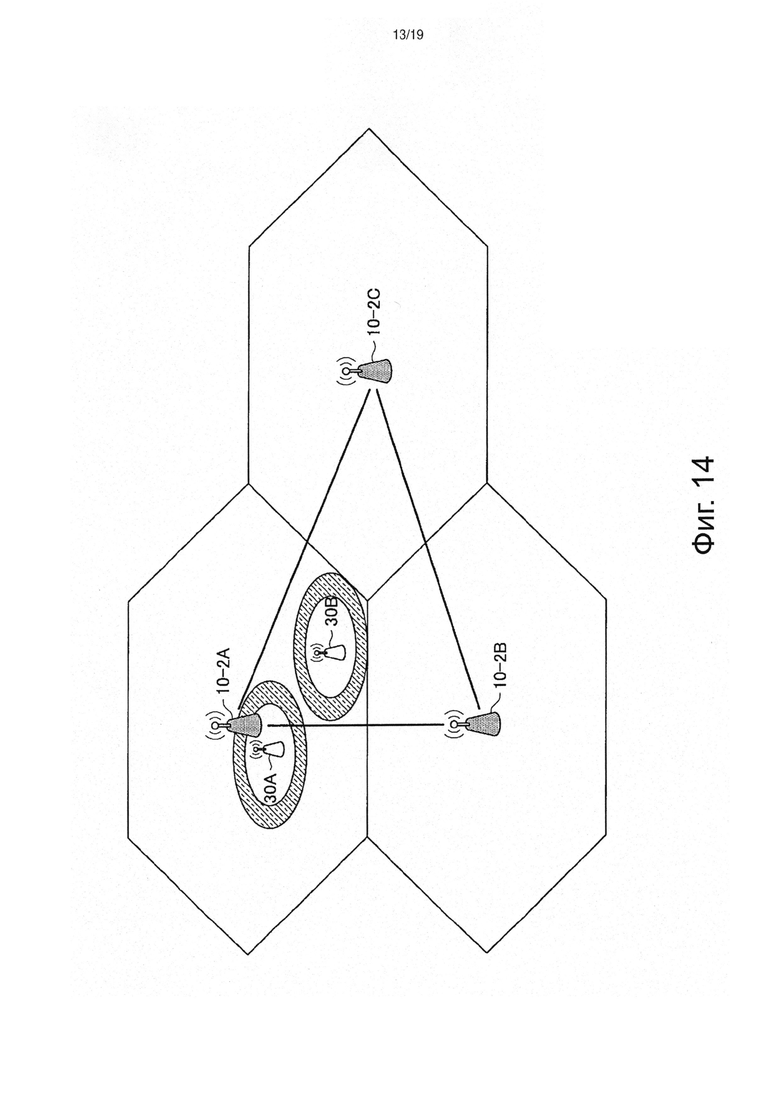
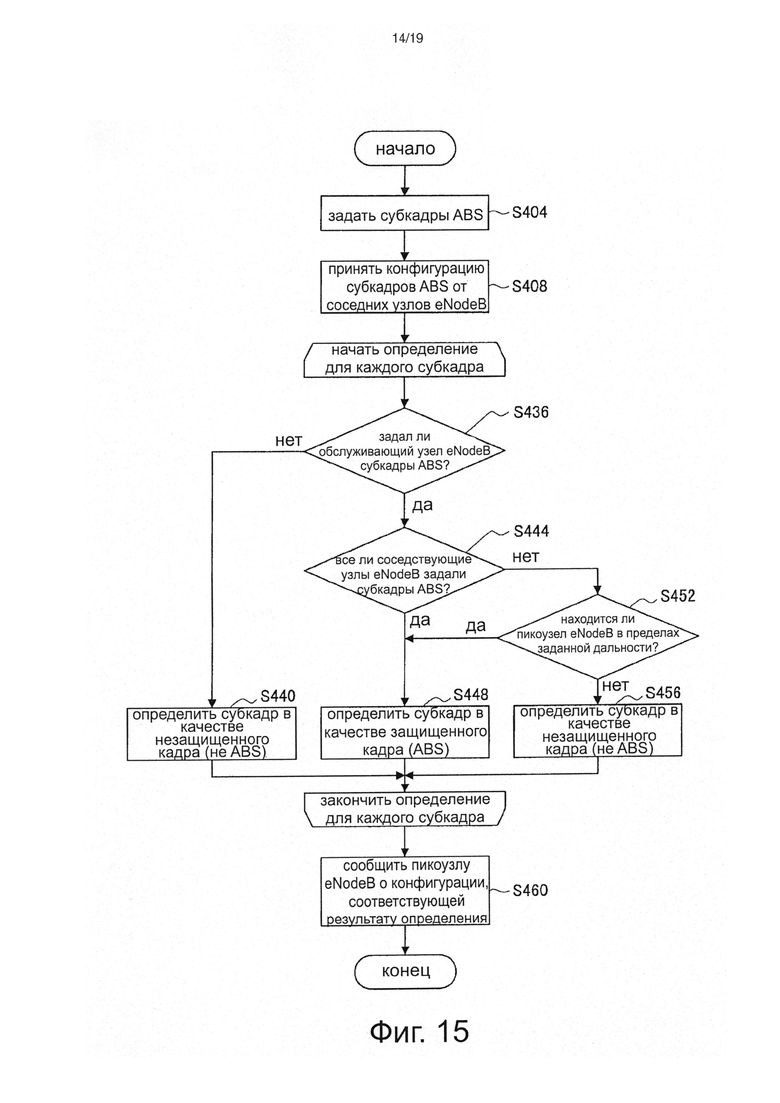
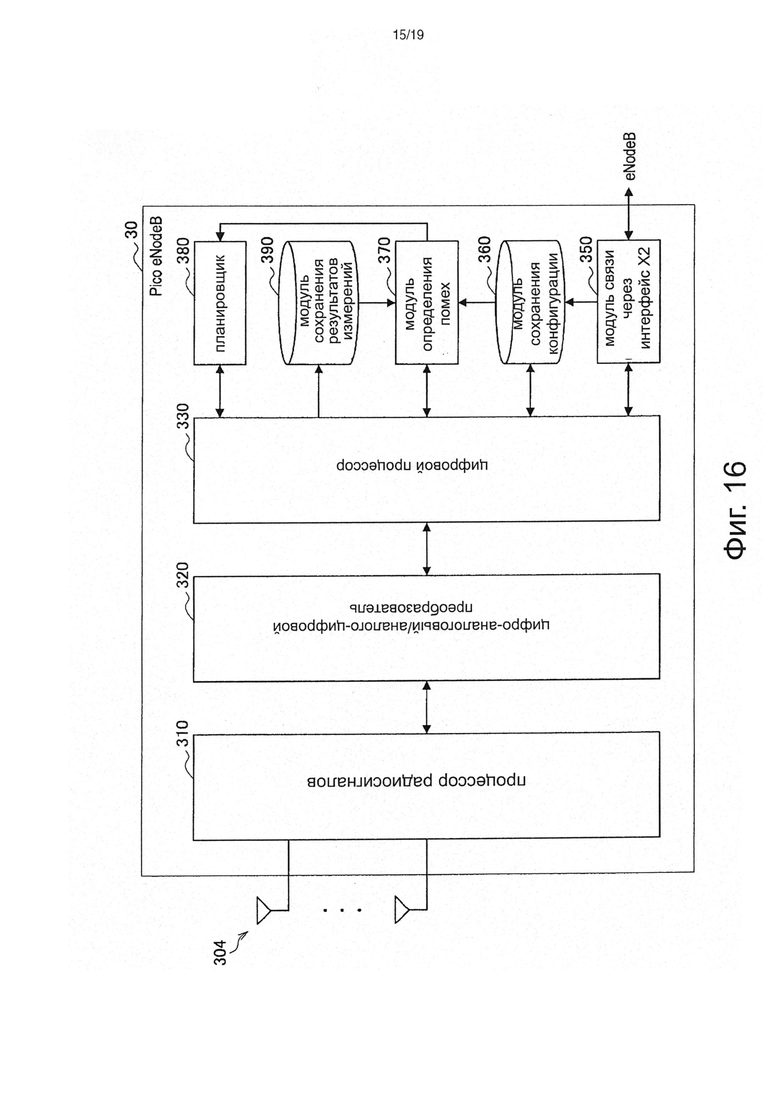
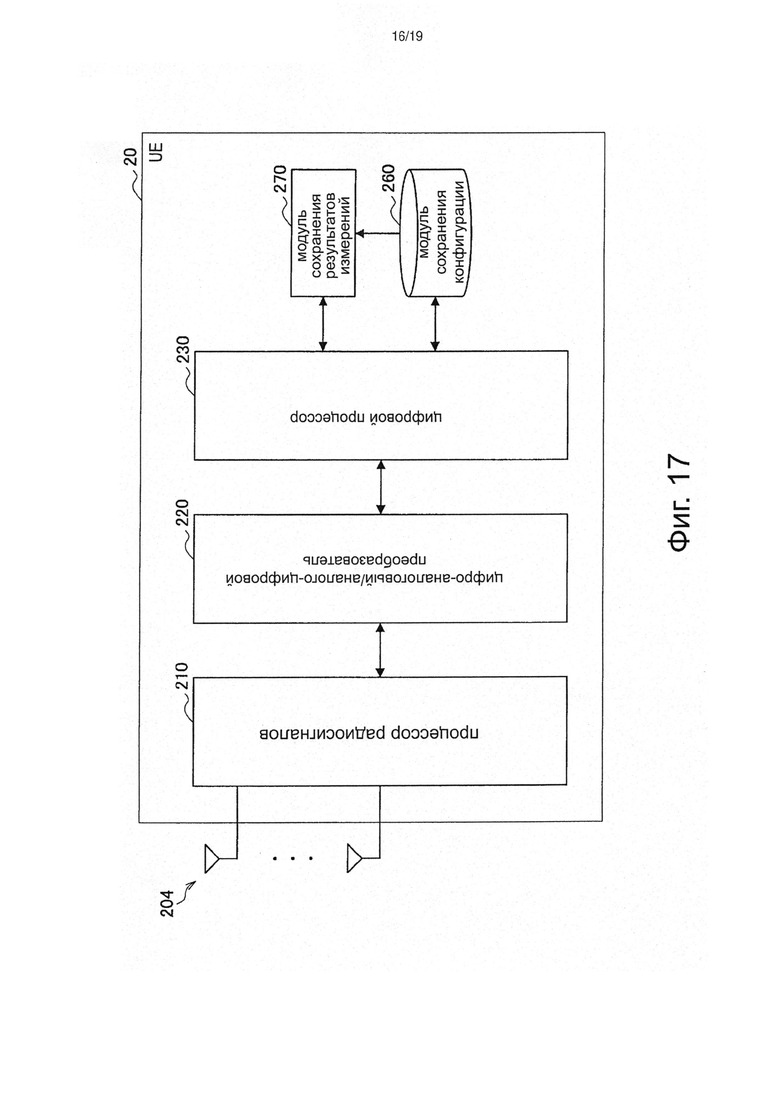
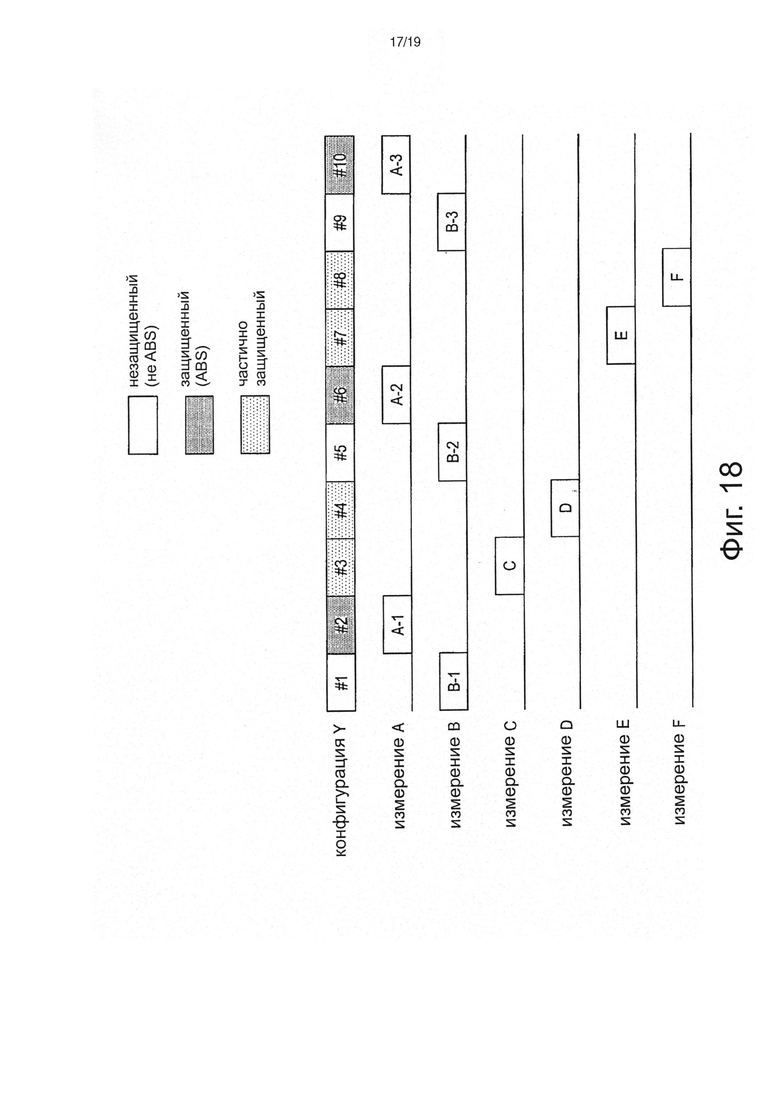
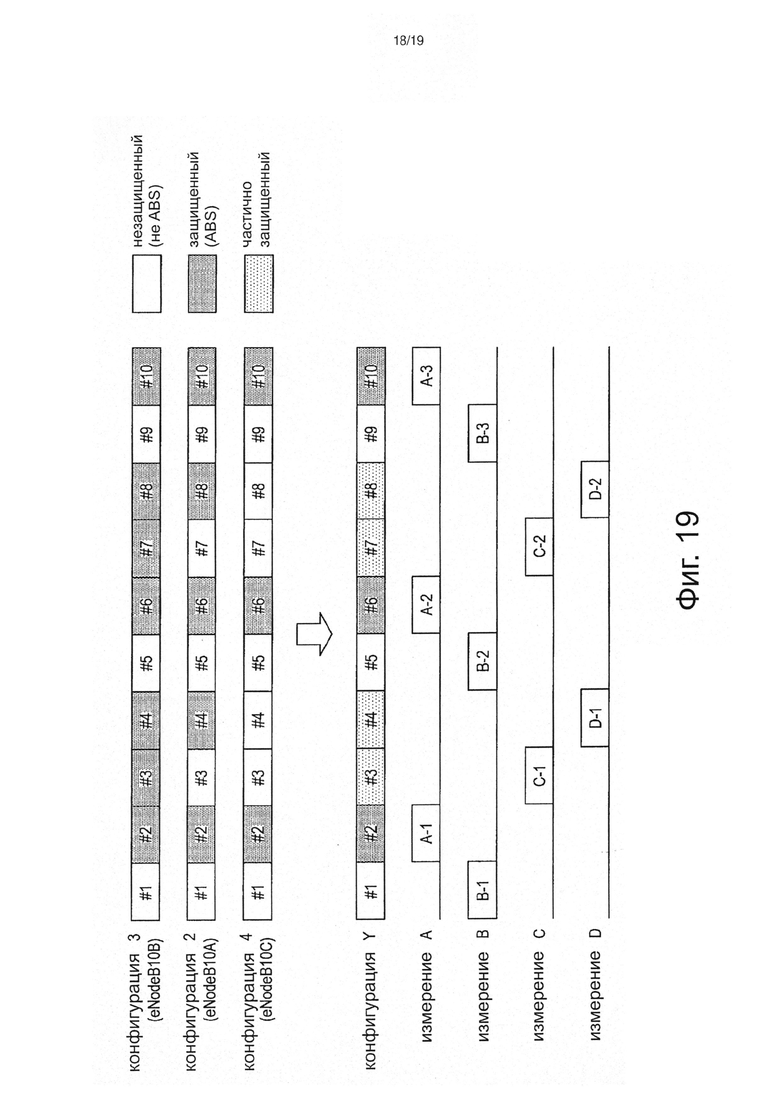
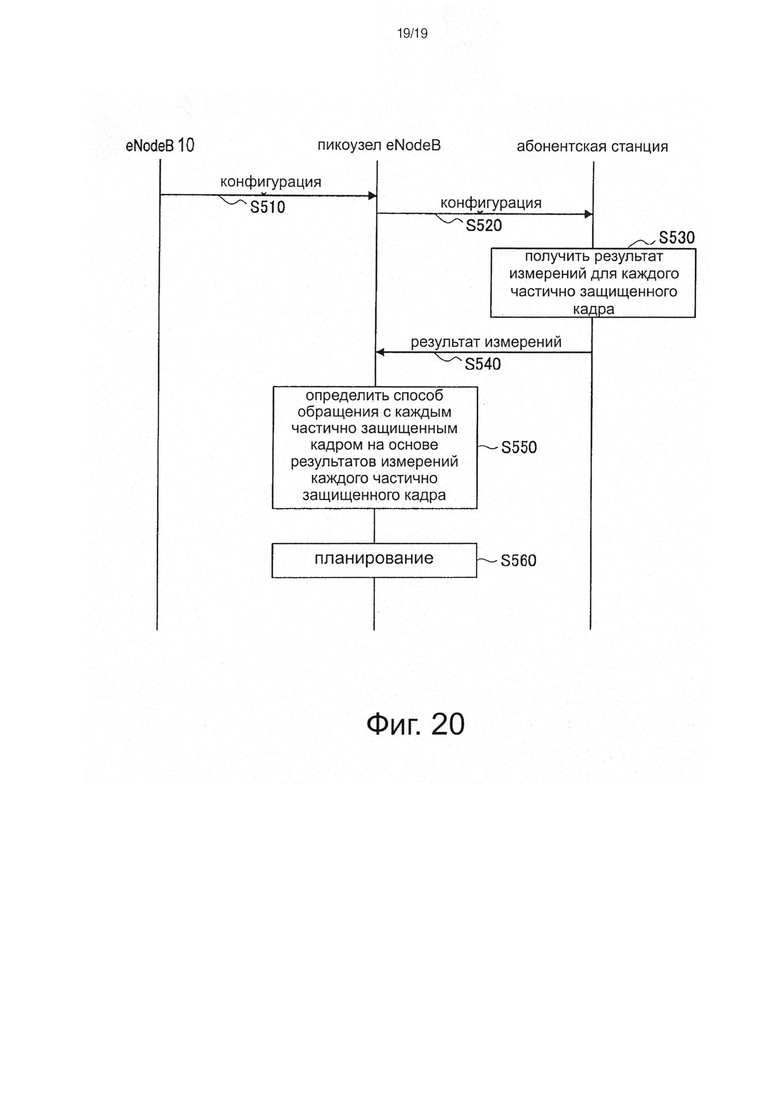
Изобретение относится к области радиосвязи. Технический результат изобретения заключается в возможности использования почти пустого субкадра (ABS) в разных ячейках или областях для защиты терминала связи от помех без излишнего ограничения пропускной способности связи терминала. Статус защиты от помех для кадра связи определяют на основе по меньшей мере частично конфигураций базовых станций. Эти конфигурации могут указывать схемы из одного или более кадров первого типа. Кадр первого типа может представлять собой почти пустой субкадр (ABS). В некоторых вариантах осуществления статус защиты от помех для кадра может быть определен как защищенный статус, незащищенный статус или частично защищенный статус. 4 н. и 25 з.п. ф-лы, 20 ил.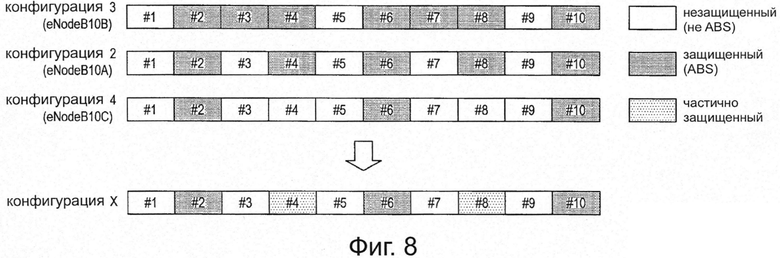
1. Способ связи, содержащий этап, на котором определяют посредством процессора базовой станции статус защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации базовых станций, причем первая из указанных конфигураций отличается по меньшей мере от второй из указанных конфигураций, при этом часть информации, указывающая вторую из указанных конфигураций, принимают от второй базовой станции.
2. Способ по п. 1, в котором первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа.
3. Способ по п. 2, в котором кадр первого типа представляет собой кадр с ограниченной передачей, в котором ограничены все передачи, отличные от передачи опорного сигнала.
4. Способ по п. 2, в котором кадр первого типа представляет собой почти пустой субкадр (ABS).
5. Способ по п. 2, дополнительно содержащий этап, на котором передают, посредством модуля связи, статус защиты от помех для кадра устройству управления связью.
6. Способ по п. 5, в котором на этапе определения статуса защиты от помех для кадра:
определяют, что статус защиты от помех для кадра является незащищенным статусом, если указанная первая конфигурация не связывает указанный кадр с кадром первого типа;
определяют, что статус защиты от помех для кадра является защищенным статусом, если каждая из конфигураций связывает указанный кадр с кадром первого типа; и
определяют, что статус защиты от помех для кадра является частично защищенным статусом, если указанная первая конфигурация связывает указанный кадр с кадром первого типа, а по меньшей мере одна из других конфигураций не связывает указанный кадр с кадром первого типа.
7. Способ по п. 5, в котором на этапе определения статуса защиты от помех для кадра:
определяют, что статус защиты от помех для кадра является защищенным статусом, если каждая из конфигураций связывает указанный кадр с кадром первого типа;
определяют, что статус защиты от помех для кадра является частично защищенным статусом, если по меньшей мере одна из указанных конфигураций связывает указанный кадр с кадром первого типа, а по меньшей мере одна другая из указанных конфигураций не связывает указанный кадр с кадром первого типа; и
определяют, что статус защиты от помех для кадра является незащищенным статусом, если ни одна из указанных конфигураций не связывает указанный кадр с кадром первого типа.
8. Способ по п. 5, в котором определение статуса защиты от помех для кадра для устройства управления связью дополнительно основано, по меньшей мере частично, на местонахождении устройства управления связью.
9. Способ по п. 8, в котором на этапе определения статуса защиты от помех для кадра для устройства управления связью на основе, по меньшей мере частично, информации о местонахождении устройства управления связью определяют статус защиты от помех для кадра на основе, по меньшей мере частично, того, находится ли устройство управления связью в пределах заданного расстояния от указанной базовой станции.
10. Способ по п. 9, в котором устройство управления связью расположено в пределах соты указанной базовой станции.
11. Способ по п. 8, в котором на этапе определения статуса защиты от помех для кадра:
определяют, что статус защиты от помех для кадра является незащищенным статусом, если указанная первая конфигурация не связывает указанный кадр с кадром первого типа;
определяют, что статус защиты от помех для кадра является защищенным статусом, если каждая из указанных конфигураций связывает указанный кадр с кадром первого типа или если первая конфигурация связывает указанный кадр с кадром первого типа и устройство управления связью расположено в пределах дальности связи первой из базовых станций; и
определяют, что статус защиты от помех для кадра является незащищенным статусом, если первая конфигурация связывает указанный кадр с кадром первого типа, по меньшей мере одна другая из конфигураций не связывает указанный кадр с кадром первого типа и устройство управления связью не расположено в пределах дальности связи первой базовой станции,
при этом указанная первая конфигурация является конфигурацией первой базовой станции.
12. Способ по п. 5, в котором
указанная первая конфигурация является конфигурацией указанной базовой станции,
указанная вторая конфигурация является конфигурацией указанной второй базовой станции и
указанная базовая станция принимает часть информации, указывающую вторую конфигурацию.
13. Способ по п. 5, в котором множество конфигураций множества базовых станций совпадает друг с другом, при этом указанное множество конфигураций соответствуют одной или более сотам, расположенным центрально относительно указанного множества базовых станций.
14. Способ по п. 1, дополнительно содержащий этап, на котором связывают статус защиты от помех с указанным кадром.
15. Способ по п. 1, в котором указанный кадр представляет собой субкадр радиокадра.
16. Базовая станция, содержащая:
модуль определения помех, выполненный с возможностью определения статуса защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации двух или более базовых станций, причем первая из указанных конфигураций отличается по меньшей мере от второй из указанных конфигураций, при этом часть информации, указывающая вторую из указанных конфигураций, принимается от второй базовой станции.
17. Базовая станция по п. 16, в которой модуль определения помех выполнен с возможностью определения статуса защиты от помех для кадра посредством:
определения, что статус защиты от помех для кадра является незащищенным статусом, если указанная первая конфигурация не связывает указанный кадр с кадром первого типа;
определения, что статус защиты от помех для кадра является защищенным статусом, если каждая из указанных конфигураций связывает указанный кадр с кадром первого типа; и
определения, что статус защиты от помех для кадра является частично защищенным кадром, если первая конфигурация связывает указанный кадр с кадром первого типа, а по меньшей мере одна другая из указанных конфигураций не связывает указанный кадр с кадром первого типа.
18. Базовая станция по п. 17, дополнительно содержащая:
модуль связи, выполненный с возможностью передачи статуса защиты от помех для кадра устройству управления связью, и
модуль связывания, выполненный с возможностью связывать статус защиты от помех с указанным кадром,
при этом первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа,
причем кадр первого типа представляет собой почти пустой субкадр (ABS).
19. Базовая станция по п. 16, в котором модуль определения помех выполнен с возможностью определения статуса защиты от помех для кадра посредством:
определения, что статус защиты от помех для кадра является защищенным статусом, если каждая из указанных конфигураций связывает указанный кадр с кадром первого типа;
определения, что статус защиты от помех для кадра является частично защищенным статусом, если по меньшей мере одна из указанных конфигураций связывает указанный кадр с кадром первого типа, а по меньшей мере одна другая из указанных конфигураций не связывает указанный кадр с кадром первого типа; и
определения, что статус защиты от помех для кадра является незащищенным статусом, если ни одна из конфигураций не связывает указанный кадр с кадром первого типа.
20. Базовая станция по п. 19, дополнительно содержащая
модуль связи, выполненный с возможностью передачи статуса защиты от помех для кадра устройству управления связью, и
модуль связывания, выполненный с возможностью связывать статус защиты от помех с указанным кадром,
при этом первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа,
причем кадр первого типа представляет собой почти пустой субкадр (ABS).
21. Базовая станция по п. 16, в которой модуль определения помех дополнительно выполнен с возможностью определения статуса защиты от помех для кадра на основе, по меньшей мере частично, местонахождения устройства управления связью.
22. Базовая станция по п. 21, дополнительно содержащая
модуль связи, выполненный с возможностью передачи статуса защиты от помех для кадра устройству управления связью, и
модуль связывания, выполненный с возможностью связывать статус защиты от помех с указанным кадром,
при этом первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа,
причем кадр первого типа представляет собой почти пустой субкадр (ABS).
23. Базовая станция по п. 16, в которой
указанная первая конфигурация является конфигурацией указанной базовой станции,
указанная вторая конфигурация является конфигурацией указанной второй базовой станции, и
указанная базовая станция выполнена с возможностью приема части информации, указывающей указанную вторую конфигурацию.
24. Машиночитаемый носитель записи с записанной на нем компьютерной программой, которая при исполнении по меньшей мере одним процессором выполняет способ, содержащий этапы, на которых определяют статус защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей конфигурации базовых станций, причем первая из указанных конфигураций отличается по меньшей мере от второй из указанных конфигураций, при этом часть информации, указывающую вторую из указанных конфигураций, принимают от второй базовой станции.
25. Машиночитаемый носитель записи п. 24, в котором первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа.
26. Машиночитаемый носитель записи по п. 25, в котором способ дополнительно содержит этап, на котором передают, посредством модуля связи, статус защиты от помех для кадра устройству управления связью.
27. Система беспроводной связи, содержащая:
первую базовую станцию, включающую в себя модуль определения помех, и
вторую базовую станцию,
при этом
первая базовая станция выполнена с возможностью хранения информации, указывающей первую конфигурацию,
вторая базовая станция выполнена с возможностью хранения информации, указывающей вторую конфигурацию,
модуль определения помех первой базовой станции выполнен с возможностью определения статуса защиты от помех для кадра на основе, по меньшей мере частично, информации, указывающей первую конфигурацию первой базовой станции, и информации, указывающей вторую конфигурацию второй базовой станции, и
первая конфигурация отличается от второй конфигурации.
28. Система по п. 27, в которой первая конфигурация указывает первую схему с одним или более кадрами первого типа, и/или вторая конфигурация указывает вторую схему с одним или более кадрами первого типа.
29. Система по п. 27, дополнительно содержащая третью базовую станцию, при этом:
первая, вторая и третья базовые станции выполнены с возможностью хранения информации, указывающей третью конфигурацию,
указанная третья конфигурация соответствует соте, центрально расположенной относительно первой, второй и третьей базовых станций, и
каждая из первой, второй и третьей базовой станции выполнена с возможностью передачи сигналов в соте в соответствии с третьей конфигурацией.
| QUALCOMM INCORPORATED: "eCIC FOR A PICO ENB WITH MULTIPLE INTERFERING MACRO ENBs", 3GPP DRAFT; R3-103415; 09.11.2010 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

