Уровень техники
Настоящее изобретение относится к области техники систем приведения в действие на основе сервоклапанов. Изобретение конкретно относится к системе приведения в действие для авиационного турбореактивного двигателя.
Турбореактивный двигатель типично содержит системы приведения в действие на основе сервоклапанов, предназначенные для управления изменяемыми геометриями турбореактивного двигателя.
Под "изменяемыми геометриями" турбореактивного двигателя здесь подразумеваются модули двигателя или его окружения, размеры, формы, позиции и/или скорости которых могут быть модифицированы в зависимости от определенных событий или рабочих параметров двигателя. Примеры "изменяемых геометрий" представляют собой лопасти статора с регулируемым шагом спрямляющих аппаратов компрессора, выпускные клапаны компрессора, кромки лопастей турбины и дозатор топлива.
В типичном варианте эти системы приведения в действие отслеживаются посредством модуля электронного управления системы управления двигателем или EEC ("электронного управления двигателем") таким образом, чтобы адаптировать изменяемые геометрии к сценарию полета. Управление обеспечивается через контуры обратной связи.
Таким образом, следует четко понимать, что мониторинг систем для приведения в действие изменяемых геометрий в турбореактивном двигателе является крайне важным с точки зрения готовности и производительности турбореактивного двигателя.




 Ухудшение характеристик этих систем приведения в действие конкретно выражается посредством несовместимых позиций и/или размеров модулей турбореактивного двигателя с управляющими воздействиями ECU в установившемся рабочем режиме или посредством медленной реакции этих модулей на эти управляющие воздействия в переходных режимах. Эти ухудшения характеристик являются настораживающими признаками неисправности, поскольку, в общем, в первой фазе они компенсируются либо посредством контуров обратной связи систем приведения в действие либо без конкретного последствия, за исключением реконфигурации (например, изменения в активном канале управления).
Ухудшение характеристик этих систем приведения в действие конкретно выражается посредством несовместимых позиций и/или размеров модулей турбореактивного двигателя с управляющими воздействиями ECU в установившемся рабочем режиме или посредством медленной реакции этих модулей на эти управляющие воздействия в переходных режимах. Эти ухудшения характеристик являются настораживающими признаками неисправности, поскольку, в общем, в первой фазе они компенсируются либо посредством контуров обратной связи систем приведения в действие либо без конкретного последствия, за исключением реконфигурации (например, изменения в активном канале управления).
Тем не менее, после некоторого времени, в течение которого эти ухудшения характеристик сохраняются и усиливаются, они больше не могут компенсироваться, поскольку управляющее оборудование имеет ограничения. Таким образом, эти ухудшения характеристик могут иметь последствия в виде снижения эксплуатационных параметров турбореактивного двигателя или его поломки. Это может выражаться посредством сообщения с ошибкой, передаваемого посредством ECU. Следовательно, определение этого ухудшения характеристик является слишком запоздалым, поскольку оно осуществляется только тогда, когда возникает неисправность в системе приведения в действие.
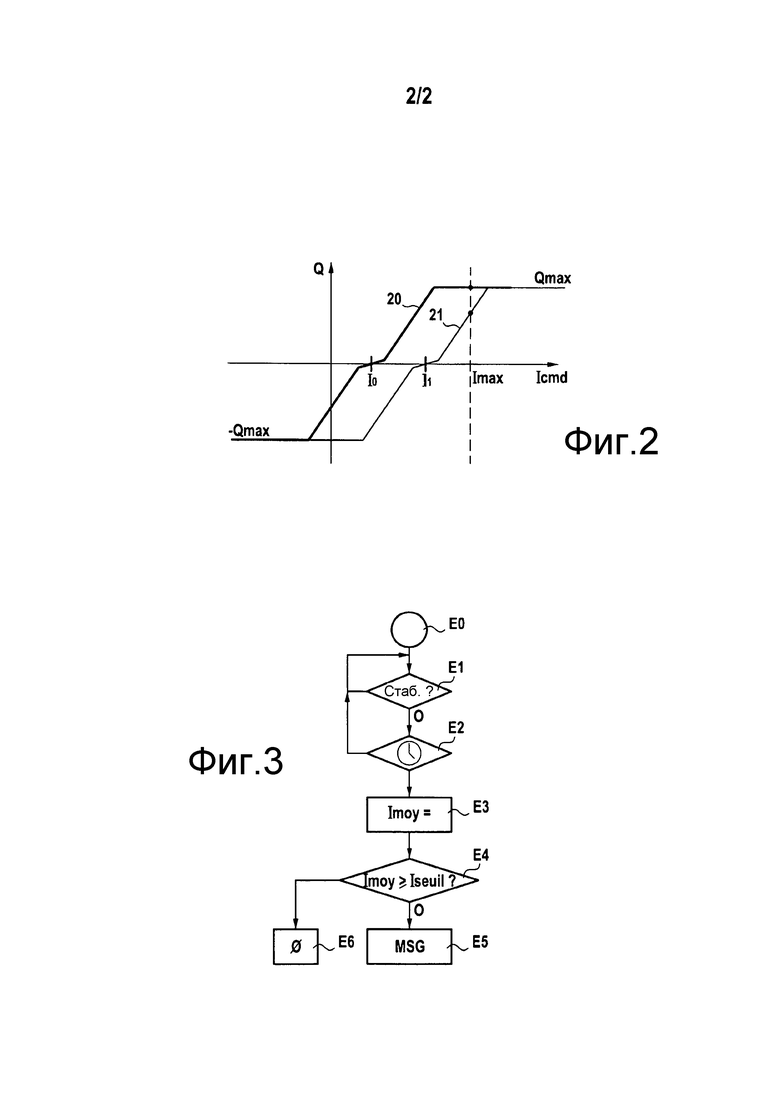
Конкретный тип ухудшения характеристик представляет собой смещение тока покоя сервоклапана, как показано на фиг. 2.
Фиг. 2 является графиком, который иллюстрирует кривую рабочей характеристики сервоклапана. Более конкретно график на фиг. 2 иллюстрирует зависимое от времени изменение в гидравлическом расходе Q, доставляемом посредством сервоклапана 3 в актуатор, в зависимости от управляющего тока Icmd. На фиг. 2 Imax представляет максимальное значение управляющего тока Icmd, которое может предоставлять ECU.
Кривая 20 соответствует расчетному режиму сервоклапана и показывает то, что ток покоя сервоклапана, т.е. управляющий ток, требуемый для поддержания актуатора в определенной позиции, имеет ненулевое значение I0. Тем не менее, в расчетном режиме ток Imax дает возможность предоставления максимального гидравлического расхода Qmax.
Кривая 21 иллюстрирует нерасчетный режим сервоклапана, например режим после старения. Можно видеть, что ток покоя имеет значение I1 большее I0. Другими словами, выявлено смещение тока покоя сервоклапана. Дополнительно в нерасчетном режиме кривой 21 ток Imax больше не дает возможности предоставления максимального гидравлического расхода Qmax. Другими словами, кривая 21 соответствует режиму ухудшенных характеристик сервоклапана.
 Определение такого режима ухудшенных характеристик хорошо известно. Тем не менее, в ходе определения рабочие характеристики турбореактивного двигателя уже существенно затронуты.
Определение такого режима ухудшенных характеристик хорошо известно. Тем не менее, в ходе определения рабочие характеристики турбореактивного двигателя уже существенно затронуты.
Следовательно, существует потребность в эффективном способе мониторинга для системы для приведения в действие изменяемых геометрий турбореактивного двигателя, в частности для того, чтобы иметь возможность доставлять уведомление о необходимости технического обслуживания для этой системы приведения в действие до того, как снизятся эксплуатационные параметры турбореактивного двигателя или произойдет его поломка.
Аналогичная потребность существует в других вариантах применения системы приведения в действие на основе сервоклапанов.
Документ US 2009/0306830 описывает способ для мониторинга системы клапанов, в котором время переключения элемента клапана измеряется между двумя позициями. Если эта длительность превышает предварительно определенное пороговое значение, способ определяет то, обусловлено это превышение износом системы или общим режимом. Общий режим, например, представляется посредством управляющего тока электромагнитного клапана. Управляющий ток сравнивается с опорным значением. Тем не менее, этот документ не описывает, что релевантный управляющий ток является средним значением управляющего тока в ходе обнаружения стабилизированного режима, при этом стабилизированный режим определяется посредством верификации того, что измеренная позиция актуатора остается постоянной. Напротив, описанный способ мониторинга требует переключения элементов клапана между двумя позициями.
Цель и сущность изобретения
Настоящее изобретение удовлетворяет вышеуказанную потребность посредством предложения способа для мониторинга системы приведения в действие, содержащей устройство управления, сервоклапан и актуатор, управляемый посредством сервоклапана, причем устройство управления может определять управляющий ток согласно заданному значению позиции и измеренной позиции актуатора и предоставлять управляющий ток в сервоклапан. Этот способ мониторинга отличается тем, что он содержит:
- этап для определения стабилизированного режима,
- этап для определения среднего значения управляющего тока в ходе определения стабилизированного режима, и
- этап для сравнения среднего значения с предварительно определенным пороговым значением.
 Соответственно изобретение также направлено на устройство управления для системы приведения в действие, содержащей устройство управления, сервоклапан и актуатор, управляемый посредством сервоклапана, причем устройство управления может определять управляющий ток согласно заданному значению позиции и измеренной позиции актуатора и предоставлять управляющий ток в сервоклапан. Это устройство мониторинга отличается тем, что оно содержит:
Соответственно изобретение также направлено на устройство управления для системы приведения в действие, содержащей устройство управления, сервоклапан и актуатор, управляемый посредством сервоклапана, причем устройство управления может определять управляющий ток согласно заданному значению позиции и измеренной позиции актуатора и предоставлять управляющий ток в сервоклапан. Это устройство мониторинга отличается тем, что оно содержит:
- средство для определения стабилизированного режима,
- средство для определения среднего значения управляющего тока в ходе определения стабилизированного режима, и
- средство для сравнения среднего значения с предварительно определенным пороговым значением.
В стабилизированном режиме позиция актуатора соответствует заданному значению позиции. Следовательно, управляющий ток сервоклапана соответствует току покоя сервоклапана. Вычисление среднего значения этого тока дает возможность работы без быстрых изменений, и сравнение с пороговым значением дает возможность тестирования того, является или нет смещение тока покоя приемлемым.
Способ мониторинга может содержать, перед этапом определения, этап ожидания с периодом ожидания, в ходе которого определяется стабилизированный режим.
Это предоставляет возможность выжидания ослабления возможных переходных эффектов после определения этого стабилизированного режима.
В варианте осуществления стабилизированный режим определяется согласно позиции актуатора.
В варианте осуществления система приведения в действие является системой для приведения в действие изменяемых геометрий авиационного турбореактивного двигателя, при этом стабилизированный режим определяется, когда воздушное судно находится на земле.
Среднее значение может быть определено согласно управляющему току, определенному посредством устройства управления.
Следовательно, среднее значение является точным, поскольку на него не влияет точность измерения управляющего тока.
В этом случае устройство управления может содержать пропорционально-интегральный контроллер, при этом среднее значение определяется согласно интегральному току управления.
Согласно варианту осуществления способ мониторинга содержит, когда среднее значение превышает или равно предварительно определенному пороговому значению, этап для формирования сообщения о необходимости технического обслуживания.
В конкретном варианте осуществления различные этапы способа мониторинга определяются посредством инструкций компьютерных программ.
Соответственно изобретение также направлено на компьютерную программу на носителе информации, причем эта программа может применяться в устройстве мониторинга или, если обобщать, в компьютере, причем эта программа включает в себя инструкции, выполненные с возможностью для применения этапов способа мониторинга, как описано выше.
Эта программа может использовать любой язык программирования и иметь форму исходного кода, объектного кода или промежуточного кода между исходным кодом и объектным кодом, к примеру в частично компилированной форме либо в любой другой требуемой форме.
Изобретение также направлено на машиночитаемый носитель информации и включает в себя инструкции компьютерной программы, как упомянуто выше.
Носитель информации может быть любым объектом, сущностью или устройством, допускающим сохранение программы. Например, носитель может включать в себя средство хранения, такое как ROM, например CD-ROM или ROM микроэлектронной схемы, либо дополнительно средство магнитной записи, например дискету (гибкий диск) или жесткий диск.
С другой стороны, носитель информации может представлять собой передающую среду, к примеру электрический или оптический сигнал, который может быть передан через электрический или оптический кабель, по радиосвязи либо посредством другого средства. Программа согласно изобретению может, в частности, загружаться по сети Интернет.
Альтернативно носитель информации может быть интегральной схемой, в которую включена программа, при этом схема выполнена с возможностью осуществления релевантного способа или использования при его осуществлении.
Краткое описание чертежей
 Другие признаки и преимущества настоящего изобретения должны становиться очевидными из нижеприведенного описания в отношении прилагаемых чертежей, которые иллюстрируют примерный его вариант осуществления без ограничений.
Другие признаки и преимущества настоящего изобретения должны становиться очевидными из нижеприведенного описания в отношении прилагаемых чертежей, которые иллюстрируют примерный его вариант осуществления без ограничений.
На этих чертежах:
фиг. 1 иллюстрирует систему приведения в действие турбореактивного двигателя,
фиг. 2 является графиком, который иллюстрирует кривую работы сервоклапана,
фиг. 3 иллюстрирует в качестве блок-схемы последовательности операций способа основные этапы способа мониторинга согласно изобретению.
Подробное описание вариантов осуществления
Как описано выше, изобретение относится к мониторингу цепочек сервоуправления систем приведения в действие на основе сервоклапанов. В варианте осуществления, описанном здесь, рассматривается мониторинг цепочки сервоуправления системы приведения в действие, управляющей изменяемой геометрией турбореактивного двигателя в качестве оборудования воздушного судна. Тем не менее, это допущение не накладывает никаких ограничений. Изобретение также применяется к другим системам приведения в действие с использованием сервоклапана, в частности к строительному оборудованию, промышленным роботам и т.п.
Приведение в действие изменяемой геометрии, например, соответствует управлению:
- позицией дозатора топлива турбореактивного двигателя, так же известного как FMV ("клапан дозирования топлива");
- позициями выпускных клапанов компрессора турбореактивного двигателя, к примеру систем приведения в действие на основе регулируемого дренажного клапана (регулируемого дренажного клапана) и TBV (динамического дренажного клапана);
- углами тангажа лопастей статора турбореактивного двигателя, так же известных как VSB (поворотная лопасть статора); и
- зазорами в кромках лопасти турбины высокого давления или низкого давления, к примеру систем приведения в действие на основе HPTACC (активного управления зазорами турбины высокого давления) или LPTACC (активного управления зазорами турбины низкого давления).
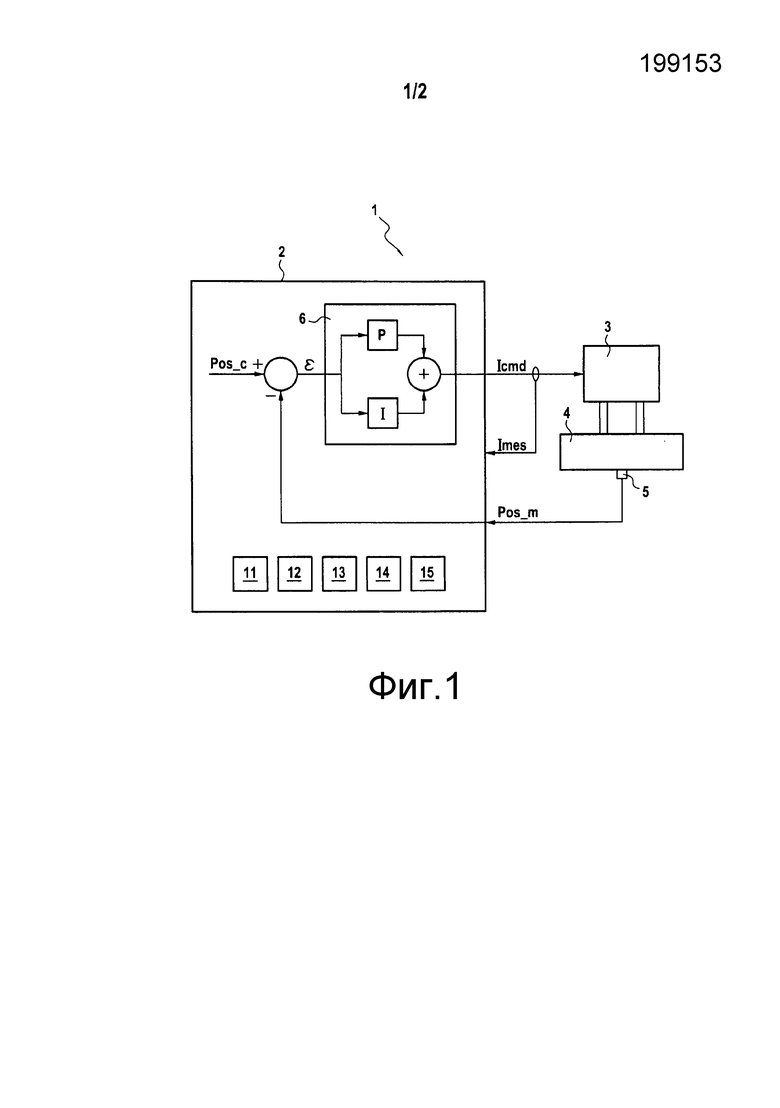
Фиг. 1 иллюстрирует систему 1 приведения в действие, управляющую позицией дозатора топлива турбореактивного двигателя. Система приведения в действие содержит устройство 2 управления, сервоклапан 3 и актуатор 4. Позиция актуатора 4 влияет на расход топлива, доставляемого посредством дозатора топлива (не показан).
Устройство 2 управления может быть компьютером турбореактивного двигателя (ECU, "модулем управления двигателем"), также называемым автономным устройством управления для воздушного судна (FADEC, "автономной цифровой системой управления двигателем").
Актуатор 4 ассоциирован с датчиком 5 позиции. Позиция актуатора 4 управляется посредством сервоклапана 3, непосредственно управляемого посредством устройства 2 управления. Более конкретно сервоклапан 3 адаптирует гидравлическую мощность, доставляемую в актуатор 4, согласно электрическому управляющему току Icmd, который он принимает из устройства 2 управления.
Позиция актуатора 4, измеряемая посредством датчика 5, указывается как Pos_m и предоставляется в устройство 2 управления.
Устройство 2 управления, сервоклапан 3 и актуатор 4 образуют контур обратной связи. Фактически устройство 2 управления определяет разность ε между позицией Pos_m и заданным значением позиции, указанным как Pos_c. Разность ε предоставляется в контроллер 6, например, пропорционально-интегрального типа, который определяет управляющий ток Icmd.
Устройство 2 управления здесь имеет аппаратную архитектуру компьютера. Оно конкретно включает в себя процессор 11, энергонезависимое запоминающее устройство 12, энергозависимое запоминающее устройство 13, интерфейс 14 и модуль 15 связи. С помощью процессора 11 можно выполнять компьютерные программы, сохраняемые в памяти в энергонезависимом запоминающем устройстве 12, посредством использования энергозависимого запоминающего устройства 13. Интерфейс 14 дает возможность получения измерительных сигналов, в частности позиции Pos_m и измерения управляющего тока Icmd, указанного как Imes, с одной стороны, и передачи управляющих сигналов, в частности управляющего тока Icmd, с другой стороны.
Модуль 15 связи дает возможность обмена данными с другими объектами, в частности оборудованием для технического обслуживания.
В варианте осуществления определение заданного значения Pos_c позиции и разности ε, а также применение контроллера 6 соответствует управляющей программе, сохраняемой в памяти в энергонезависимом запоминающем устройстве 12 и выполняемой посредством процессора 11.
 Как пояснено во введении со ссылкой на фиг. 2, ток покоя сервоклапана 3 может смещаться. Следует понимать, что между значениями I0 и I1 тока покоя, надлежащим образом соответствующими расчетному режиму и режиму ухудшенных характеристик, обнаруживается пороговый ток Iseuil, вплоть до которого смещение тока покоя остается приемлемым.
Как пояснено во введении со ссылкой на фиг. 2, ток покоя сервоклапана 3 может смещаться. Следует понимать, что между значениями I0 и I1 тока покоя, надлежащим образом соответствующими расчетному режиму и режиму ухудшенных характеристик, обнаруживается пороговый ток Iseuil, вплоть до которого смещение тока покоя остается приемлемым.
Далее со ссылкой на фиг. 3 описывается способ мониторинга согласно изобретению, предназначенный для того, чтобы определять то, является или нет смещение тока покоя сервоклапана 3 приемлемым. Способ мониторинга применяется посредством устройства 2 управления, которое в силу этого также является устройством мониторинга согласно изобретению.
Способ мониторинга по фиг. 3 начинается на этапе E0, и затем на этапе E1 проверяется то, определяется или нет стабилизированный режим.
Стабилизированный режим, например, может быть определен, когда измеренная позиция Pos_m остается постоянной.
Дополнительно или альтернативно другой режим может быть использован для определения стабилизированного режима, а именно:
воздушное судно находится на земле (что типично указывается посредством значения компьютерной переменной, называемой WOW, "обжатие колес массой самолета (сигнал касания колесами ВПП)").
Рабочий режим N двигателя является постоянным, например, соответствующим режиму холостого хода на земле.
Когда стабилизированный режим не определяется, способ мониторинга циклически переходит к этапу E1. С другой стороны, если определяется стабилизированная позиция, способ мониторинга продолжается на этапе E2.
На этапе E2 способ ожидает в течение предварительно определенного периода ожидания, в ходе которого определяется стабилизированный режим.
Этап E2 является, например, контуром для подсчета числа тактовых циклов реального времени. Если в каждом подсчитанном цикле определяется стабилизированный режим, способ переходит к этапу E3, когда счетчик циклов достигает предварительно определенного значения. С другой стороны, если стабилизированный режим больше не определяется до того как счетчик циклов достигает предварительно определенного значения, способ мониторинга возвращается к этапу E1.
Этап E2 дает возможность выжидания ослабления возможных переходных эффектов вследствие работы турбореактивного двигателя перед определением стабилизированного режима на этапе E1.
Затем на этапе E3 среднее значение Imoy управляющего тока Icmd определяется в течение предварительно определенного времени, во время которого определяется стабилизированный режим.
Среднее значение Imoy представляет ток покоя сервоклапана 3. Фактически когда стабилизированный режим определяется, измеренный Pos_m является постоянным и равным заданному значению Pos_c. Следовательно, управляющий ток Icmd используется просто для поддержания позиции постоянной.
Этап E3, например, применяется посредством контура для подсчета числа тактовых циклов реального времени. В каждом цикле i вычисляется сумма S(i)=S(i-1)+Icmd. После предварительно определенного числа n циклов сумма S(n) делится на n, чтобы получать Imoy: Imoy=S(n)/n.
В каждом цикле, если стабилизированный режим больше не определяется, способ мониторинга переходит к началу (этап E0). С другой стороны, если стабилизированный режим всегда определяется вплоть до n-го цикла и до вычисления Imoy, то способ переходит к этапу E4.
На этапе E4 ток Iavg сравнивается с пороговым током Iseuil.
Если Imoy меньше Iseuil, это означает, что смещение тока покоя сервоклапана 3 является приемлемым. Следовательно, способ мониторинга завершается на этапе E6 без отправки сообщений о необходимости технического обслуживания.
С другой стороны, если Imoy превышает или равен Iseuil, это означает то, что смещение тока покоя сервоклапана 3 больше не является приемлемым. Следовательно, способ мониторинга завершается на этапе E5, на котором формируется сообщение о необходимости технического обслуживания.
Сообщение о необходимости технического обслуживания, например, сохраняется в памяти в энергонезависимом запоминающем устройстве 12 и затем перенаправляется в конкретное оборудование для технического обслуживания посредством модуля 15 связи.
Период ожидания этапа E2, длительность, учитываемая для вычисления среднего Imoy, и пороговое значение Iseuil могут выбираться разработчиком способа мониторинга согласно целевому применению.
Например, период ожидания этапа E2 и длительность, учитывая вычисления среднего Imoy на этапе E3, могут составлять по 10 секунд.
 В этом случае полная длительность этапов E2 и E3, в течение которой требуется определять стабилизированный режим, составляет 20 секунд. Такая длительность меньше длительности, в течение которой самолет работает на холостом ходу на земле перед взлетом во время типичного задания. Следовательно, можно определять стабилизированный режим и выполнять этапы E2 и E3 в это время.
В этом случае полная длительность этапов E2 и E3, в течение которой требуется определять стабилизированный режим, составляет 20 секунд. Такая длительность меньше длительности, в течение которой самолет работает на холостом ходу на земле перед взлетом во время типичного задания. Следовательно, можно определять стабилизированный режим и выполнять этапы E2 и E3 в это время.
Кроме того, известно, что контур двигателя типично имеет собственную частоту, соответствующую периоду порядка 4 секунд. Для синхросигнала реального времени с типичным периодом 15 мс вычисление Imoy за период в 10 секунд соответствует n=666 циклов и, как следствие, дает возможность получения реального среднего независимо от колебаний контура двигателя. Дополнительно период ожидания в 10 секунд превышает период контура двигателя и, как следствие, дает возможность выжидания ослабления переходных эффектов.
Значение Iseuil может быть выбрано согласно кривой номинальной характеристики сервоклапана 3, максимальному току, который может предоставлять устройство 2 управления, и точности тока, предоставляемой посредством устройства 2 управления.
На этапе E3 среднее Imoy вычисляется согласно управляющему току Icmd. Более конкретно среднее Imoy вычисляется согласно значению управляющего тока Icmd, вычисленному посредством контроллера 6. В случае пропорционально-интегрального контроллера это значение равно интегральному току контроллера, когда определяется стабилизированный режим. Таким образом, среднее Imoy может быть вычислено согласно значению интегрального тока контроллера. Альтернативно среднее Imoy может быть вычислено согласно измеренному значению Imes управляющего тока Icmd. Тем не менее, в этом случае на среднее Imoy влияет точность измерения.
В варианте осуществления этапы по фиг. 3 соответствуют программе мониторинга, сохраняемой в памяти в энергонезависимом запоминающем устройстве 12 и выполняемой посредством процессора 11.
Согласно другому преимуществу изобретения, идентификация тока покоя сервоклапана может давать возможность ненасыщения интегральной части контроллера 6 пропорционально-интегрального типа и в силу этого ограничения ошибки вследствие смещения (в течение переходного режима) для позиции актуатора, управляемого посредством сервоклапана. В случае управления углами тангажа статора турбореактивного двигателя (VSV) эта повышенная точность дает возможность получения большего допустимого запаса и, как следствие, большей надежности.
Способ для мониторинга системы для приведения в действие изменяемых геометрий турбореактивного двигателя, при этом способ мониторинга содержит этап для определения стабилизированного режима, этап для определения среднего значения управляющего тока в ходе определения стабилизированного режима и этап для сравнения упомянутого среднего значения с предварительно определенным пороговым значением. Технический результат изобретения - повышение эффективности данного способа. 3 н. и 7 з.п. ф-лы, 3 ил.
1. Способ для мониторинга системы приведения в действие, содержащей устройство управления, сервоклапан и актуатор, управляемый посредством сервоклапана, причем устройство управления выполнено с возможностью определять управляющий ток согласно заданному значению позиции и измеренной позиции актуатора и предоставлять упомянутый управляющий ток в сервоклапан, при этом способ мониторинга содержит этапы на которых:
- определяют стабилизированный режим посредством проверки того, что упомянутая измеренная позиция остается постоянной,
- определяют среднее значение управляющего тока в ходе определения стабилизированной позиции, и
- сравнивают упомянутое среднее значение с предварительно определенным пороговым значением.
2. Способ мониторинга по п. 1, дополнительно содержащий, перед этапом определения, этап, на котором ожидают в течение периода ожидания, в ходе которого определяется стабилизированный режим.
3. Способ мониторинга по п. 1, в котором система приведения в действие является системой для приведения в действие изменяемых геометрий турбореактивного двигателя воздушного судна, при этом стабилизированный режим определяется, когда воздушное судно находится на земле.
4. Способ мониторинга по п. 1, в котором упомянутое среднее значение определяется согласно управляющему току, определенному посредством устройства управления.
5. Способ мониторинга по п. 4, в котором устройство управления содержит пропорционально-интегральный контроллер, причем упомянутое среднее значение определяется согласно интегральному току контроллера.
6. Способ мониторинга по п. 1, дополнительно содержащий, когда упомянутое среднее значение превышает или равно упомянутому предварительно определенному пороговому значению, этап, на котором формируют сообщение о техническом обслуживании.
7. Машиночитаемый носитель записи, на который записывается компьютерная программа, содержащая инструкции для выполнения этапов способа мониторинга по п. 1.
8. Способ мониторинга по п. 1, дополнительно содержащий этап определения того, должно ли уведомление о техническом обслуживании для системы приведения в действие быть сформированным перед тем как снизились эксплуатационные параметры турбореактивного двигателя или произошла его поломка.
9. Устройство управления для системы приведения в действие, содержащей устройство управления, сервоклапан и актуатор, управляемый посредством сервоклапана, причем устройство управления выполнено с возможностью определять управляющий ток согласно заданному значению позиции и измеренной позиции актуатора и предоставлять упомянутый управляющий ток в сервоклапан, при этом устройство управления содержит:
- средство для определения стабилизированного режима посредством проверки того, что упомянутая измеренная позиция остается постоянной,
- средство для определения среднего значения управляющего тока в ходе определения стабилизированного режима, и
- средство для сравнения упомянутого среднего значения с предварительно определенным пороговым значением.
10. Устройство по п. 9, дополнительно содержащее средство для определения того, должно ли уведомление о техническом обслуживании для системы приведения в действие быть сформированным перед тем, как снизились эксплуатационные параметры турбореактивного двигателя или произошла его поломка.
| US2009306830A1, 10.12.2009 | |||
| US2007203656 A1, 30.08.2007 | |||
| US2005000580A1, 06.01.2005 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СПОСОБ КАЛИБРОВКИ МНОЖЕСТВА ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ, ПРИСОЕДИНЁННЫХ К ПРИВОДНОМУ КОЛЬЦУ, В СИСТЕМЕ УПРАВЛЕНИЯ ДЛЯ ПОВОРОТА ВЫХЛОПНЫХ СТВОРОК В ПОВОРОТНОМ СОПЛЕ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ РЕГУЛИРОВАНИЯ ВЕЛИЧИНЫ ПЕРЕМЕЩЕНИЯ МНОЖЕСТВА РАСПРЕДЕЛЁННЫХ ПО ОКРУЖНОСТИ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ | 1999 |
|
RU2222707C2 |
| ОСЕСИММЕТРИЧНАЯ НАПРАВЛЯЮЩАЯ СОПЛОВАЯ ПРИВОДНАЯ СИСТЕМА, ИМЕЮЩАЯ МНОЖЕСТВЕННЫЕ СИЛОВЫЕ УПРАВЛЯЮЩИЕ КОНТУРЫ | 1996 |
|
RU2158836C1 |

