Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе для управления позициями суппорта и троса электрического стояночного тормоза (EPB).
[0002] Уровень техники
[0003] Стояночный тормоз автомобиля служит для торможения задних колес и/или передних колес автомобиля для того, чтобы поддерживать состояние, в котором автомобиль остановлен/припаркован. Стояночный тормоз должен препятствовать непреднамеренному движению транспортного средства и функционирует таким образом, что усилие прикладывается к стояночному тросу, когда водитель тянет рычаг тормоза, и приложенное усилие равномерно распределяется на механизм тормоза, установленный на колесе, через уравнитель, чтобы вынуждать механизм тормоза удерживать колесо.
[0004] Электрический стояночный тормоз (EPB) является тормозной системой, используемой в качестве замены для механического задействования рычага (ручного тормоза) или ножной педали среди стояночных тормозов, в которой стояночный тормоз включается с помощью простого задействования кнопки и мощности электромотора. В частности, EPB может быть связан с автоматическим удерживающим устройством транспортного средства (AVH) (далее в данном документе называемым "автоматическим удерживающим устройством"), которое предусматривается, чтобы уменьшать усталость, вызванную вследствие увеличения числа нажатий ножной педали водителем, когда движение транспортного средства стагнирует в городской зоне. Даже когда водитель хочет запускать транспортное средство вновь после остановки на наклонной поверхности, транспортное средство не движется назад, тем самым, улучшая безопасность и удобство водителя. Кроме того, оно имеет преимущество предоставления большой пользы для водителей, которые испытывают недостаток энергии, быстрой реакции и внимания.
[0005] В типичном применении EPB отельный актуатор, оборудованный мотором, используется, чтобы ограничивать движение колеса, тем самым, выполняя операцию задействования стояночного тормоза. EPB типа суппорта или типа ручной рычажной лебедки, главным образом, используется как средство для ограничения перемещения колеса.
[0006] Для того, чтобы управлять позицией суппорта или троса и предоставлять надлежащее тормозное усилие колесу, магнит, как правило, располагается внутри актуатора, и линейный датчик Холла устанавливается для измерения изменения в магнитном поле от магнита. Здесь, линейный датчик Холла измеряет изменение в магнитном поле и, таким образом, измеряет натяжение стояночного тормоза, создаваемое в актуаторе посредством приведения в действие мотора, в результате чего, тормозное усилие контролируется с помощью измеренного натяжения тормоза.
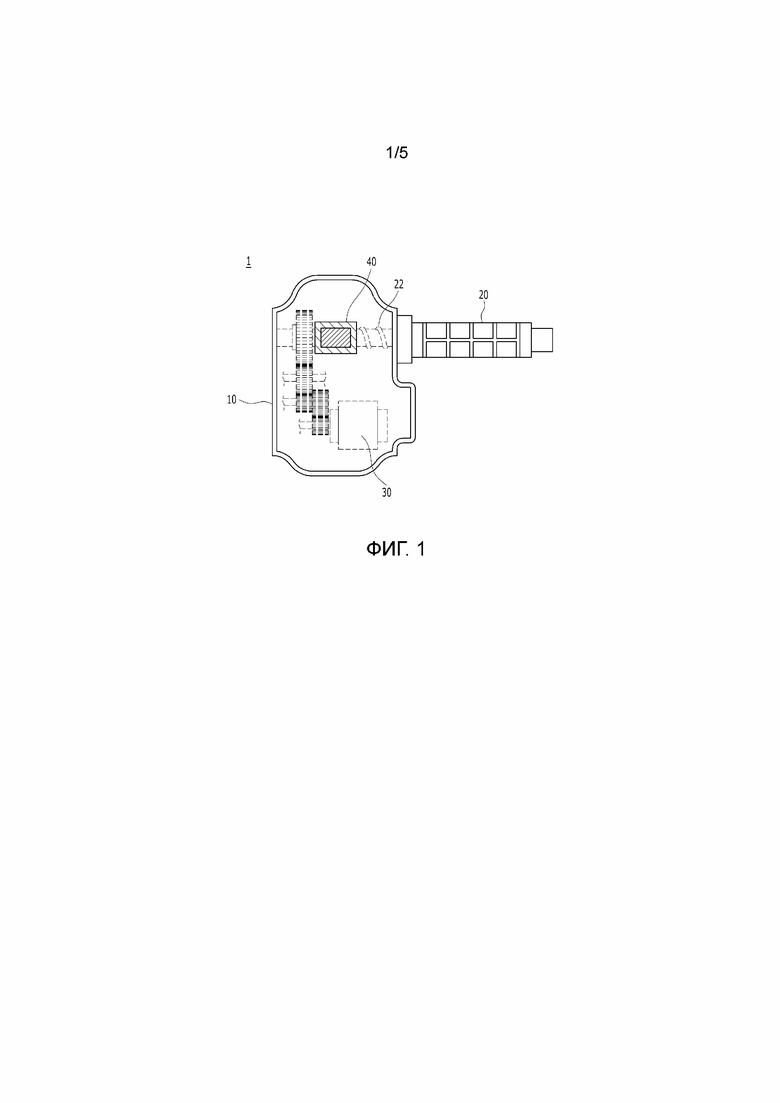
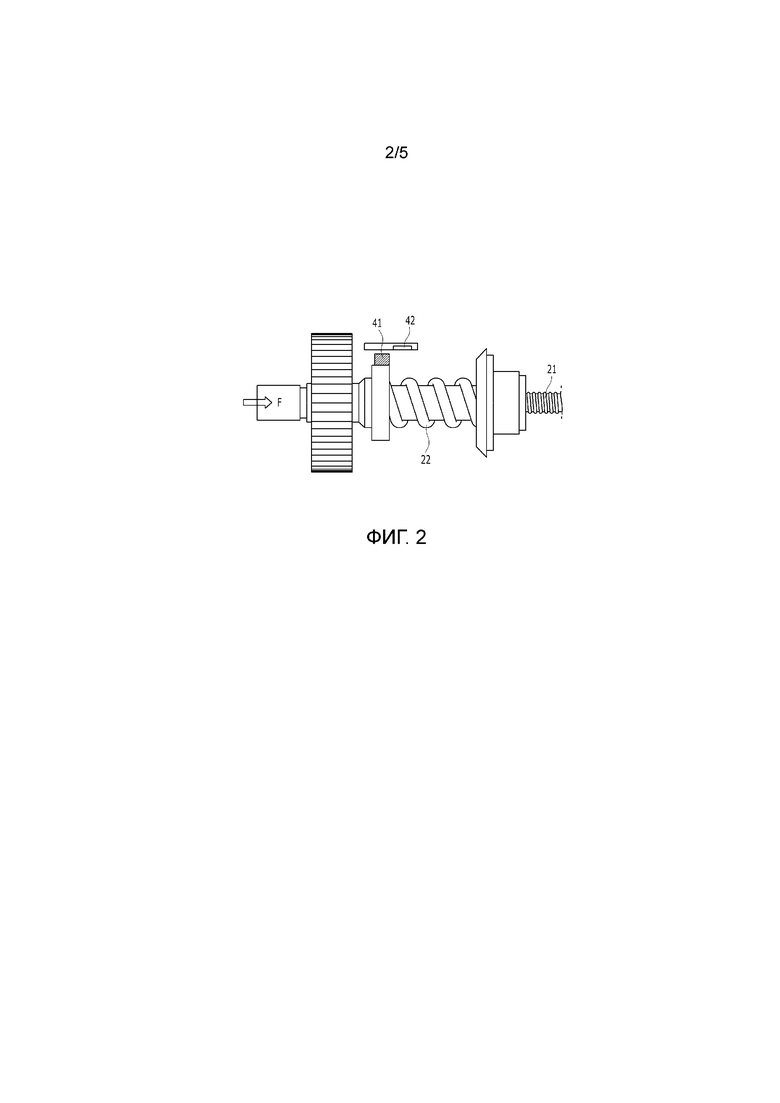
[0007] Фиг. 1 является видом, показывающим пример EPB-узла. Фиг. 2 является видом, показывающим устройство для обнаружения числа оборотов мотора согласно приводу актуатора EPB-узла согласно традиционному уровню техники.
[0008] EPB-узел 1 может включать в себя, например, корпус 10, редуктор (не показан), актуатор 20, мотор 30, электронный модуль 40 управления EPB и т.п. В частности, актуатор, показанный на фиг. 1 и 2, является актуатором типа ручной рычажной лебедки и имеет пружину 22 и резьбу 21, сформированную на зубчатом механизме, и вал вращения актуатора, соответственно, в качестве одного варианта осуществления.
[0009] Система обнаружения натяжения стояночного тормоза традиционного уровня техники, показанная на фиг. 2, дополнительно включает в себя магнит 41 и узел 42 линейного датчика Холла для определения числа оборотов актуатора или мотора. Материальные затраты увеличиваются вследствие добавления магнита 41 и узла 42 линейного датчика Холла, и магнитное тело магнита 41 должно иметь оптимизированную структуру, чтобы чутко обнаруживать изменение в магнитном поле, которое приводит в результате к увеличению сложности структуры.
[0010] Кроме того, если магнетизм теряется вследствие характеристик магнита, магнит не может играть роль самого датчика, что приводит в результате к явлению, называемому прихватыванием тормоза, в результате чего, существует проблема, что точное управление позицией становится невозможным. Для того, чтобы решать эту проблему, некоторые производители EPB выбирают два типа магнитов, один для линейного движения независимо от вращения актуатора и другой для того же вращения, что и вращение актуатора, у которых линейное движение и вращение измеряются посредством каждого датчика Холла, так что усилие, действующее на актуатор, и число оборотов актуатора измеряются в одно и то же время, тем самым, увеличивая надежность изделия. Однако, хотя надежность изделия может быть увеличена в таком случае, материальные затраты дополнительно увеличиваются, и конфигурация EPB-узла дополнительно усложняется, в результате чего, сложность структуры устройства увеличивается.
[0011] Кроме того, согласно такому традиционному устройству для управления позициями суппорта EPB, имеющего усложненную конфигурацию, также существует риск того, что приведение в действие мотора или актуатора не выполняется вследствие малозаметного позиционного колебания, вызванного непрерывным использованием EPB, перегрева мотора, явления прилипания вследствие проникновения постороннего вещества в актуатор или явления износа, и т.п.
[0012] Описание
Техническая задача
[0013] Соответственно, настоящее изобретение было выполнено с учетом вышеописанных проблем, возникающих на предшествующем уровне техники, и целью настоящего изобретения является предоставление системы для управления позициями суппорта и тормоза EPB без отдельного предоставления магнита и датчика Холла.
[0014] В качестве более конкретного варианта осуществления предоставляется система для управления операцией применения EPB и операцией освобождения EPB посредством узнавания позиции суппорта и троса EPB с помощью устройства измерения тока и устройства измерения скорости настоящего изобретения.
[0015] Техническое решение
[0016] Согласно варианту осуществления настоящего изобретения предоставляется система для управления позициями суппорта и троса электрического стояночного тормоза (EPB), система включает в себя: приводной мотор 30 актуатора, используемый для зацепления и расцепления стояночного тормоза EPB-системы; электронный модуль 40 управления для управления мотором; и аккумулятор 50 транспортного средства для подачи мощности к мотору и электронному модулю управления, при этом электронный модуль 40 управления включает в себя блок 100 измерения тока для измерения изменения в токе возбуждения мотора и блок 200 измерения пульсации для измерения пульсации мотора посредством приема выходного сигнала мотора.
[0017] Согласно варианту осуществления выходной сигнал мотора может быть выведен в качестве любой одной формы тока или напряжения.
[0018] Согласно варианту осуществления, система может включать в себя блок 110 логики применения EPB и блок 210 логики освобождения EPB.
[0019] При этом, система может включать в себя блок 300 логики защиты EPB.
[0020] Согласно другому варианту осуществления настоящего изобретения, предоставляется способ управления позициями суппорта и троса EPB, в случае режима применения EPB, способ включает в себя: измерение изменения в токе возбуждения мотора; сравнение измеренного значения тока с предварительно заданным значением тока; и прекращение применения EPB, когда измеренное значение тока превышает предварительно заданное значение тока.
[0021] В режиме применения EPB способ дополнительно может включать в себя наблюдение за величиной вращения приводного мотора EPB, чтобы предотвращать превышение числа оборотов или ложное срабатывание.
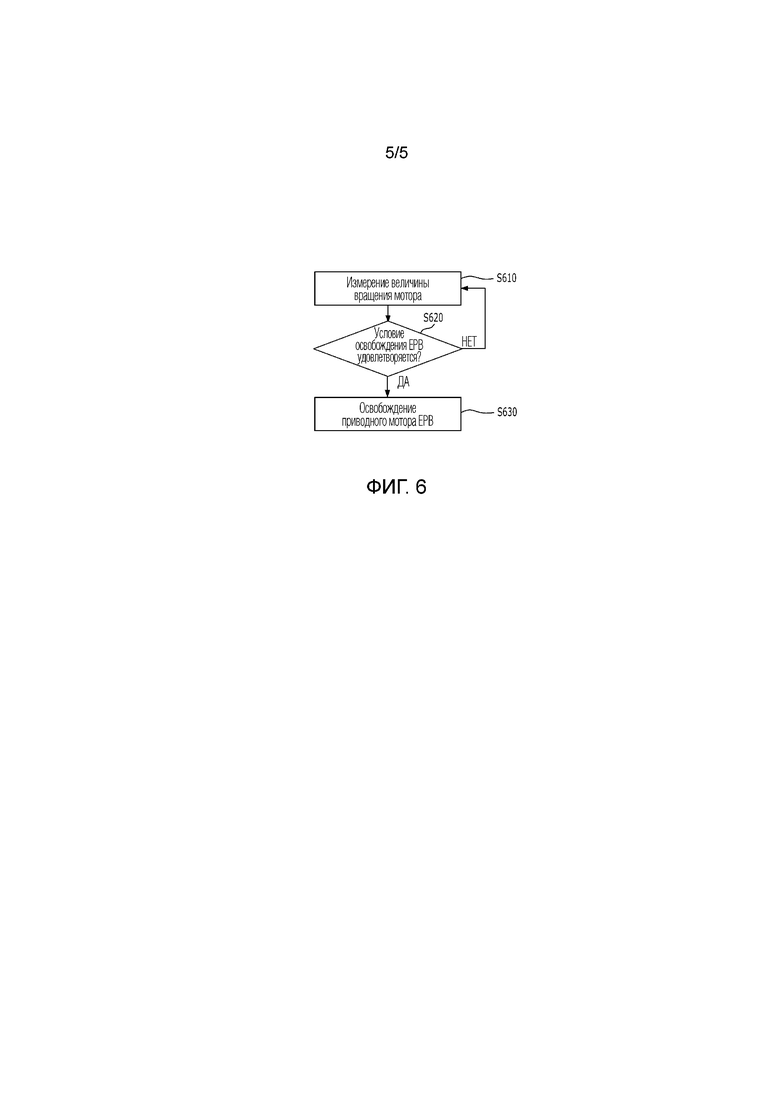
[0022] Согласно другому варианту осуществления настоящего изобретения, предоставляется способ управления позициями суппорта и троса EPB, в случае режима освобождения EPB, способ включает в себя: измерение величины вращения мотора; определение того, удовлетворяется ли условие освобождения EPB, с помощью измеренной величины вращения мотора; и освобождение приводного мотора EPB, когда условие освобождения EPB удовлетворяется.
[0023] При этом, в режиме освобождения EPB, способ может дополнительно включать в себя использование интервала времени по профилю тока приводного мотора EPB, чтобы предотвращать превышение числа оборотов или ложное срабатывание.
[0024] Полезные результаты
[0025] Согласно варианту осуществления настоящего изобретения, число оборотов EPB-мотора может быть точно измерено без использования магнита или линейного датчика Холла, когда используется EPB-мотор.
[0026] Дополнительно, поскольку магнит и линейный датчик Холла не предусматриваются, вес EPB-актуатора может быть уменьшен, актуатор может быть легко спроектирован, и стоимость продукта может быть уменьшена.
[0027] С помощью системы согласно варианту осуществления настоящего изобретения позиции суппорта и троса EPB могут точно управляться.
[0028] Кроме того, посредством предоставления логики защиты EPB, достигается преимущество в том, что устойчивость добавляется к приведению в действие EPB-системы.
[0029] Краткое описание чертежей
[0030] Фиг. 1 является видом, показывающим EPB-узел.
[0031] Фиг. 2 является видом, показывающим устройство для обнаружения числа оборотов мотора согласно приводу актуатора EPB-узла согласно традиционному уровню техники.
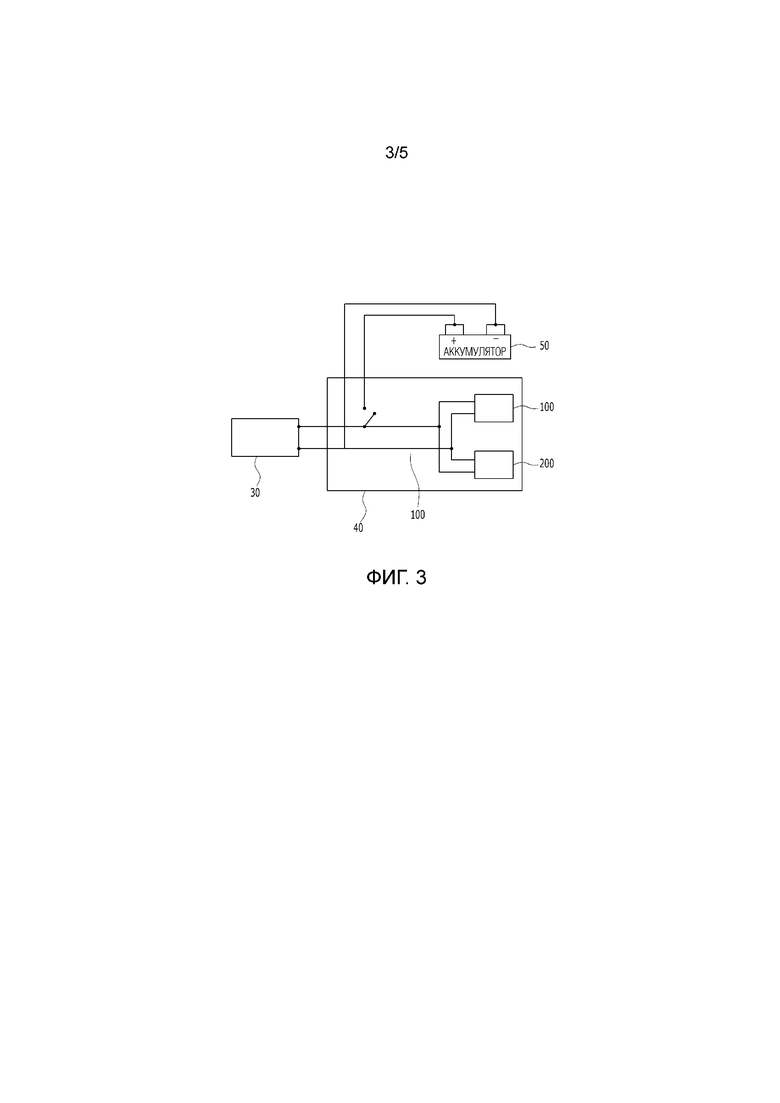
[0032] Фиг. 3 является схематичным чертежом, иллюстрирующим конфигурацию системы для управления позициями суппорта и троса EPB согласно варианту осуществления настоящего изобретения.
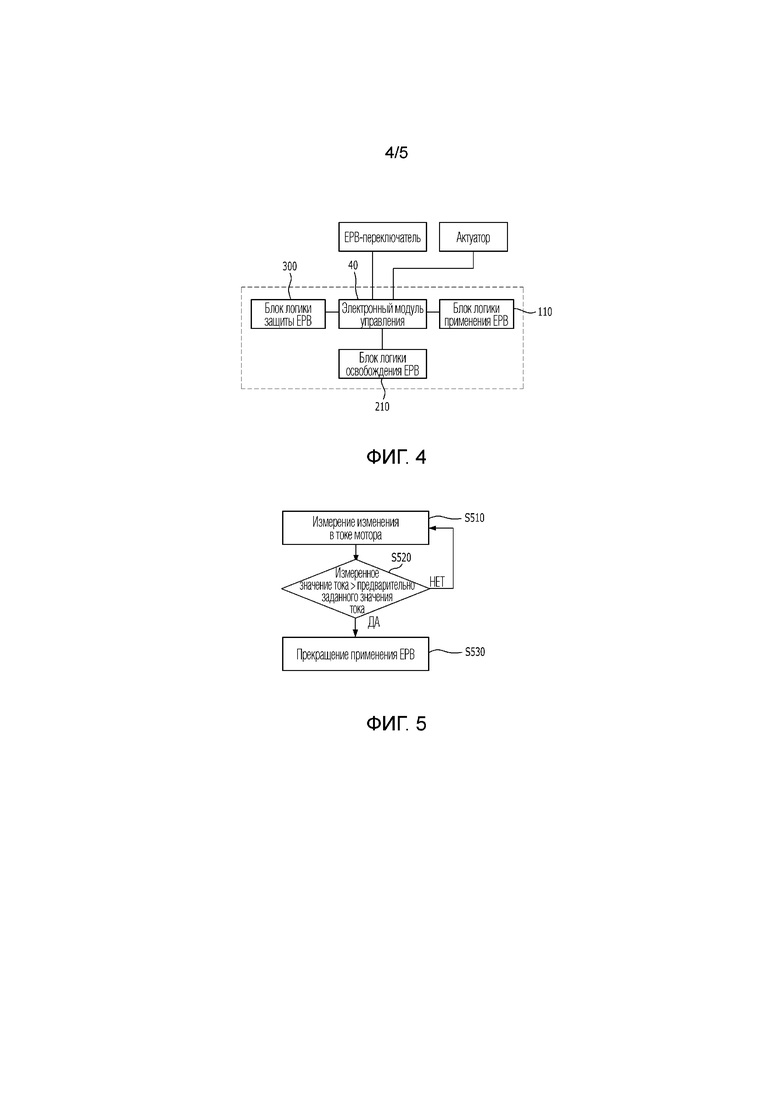
[0033] Фиг. 4 является блок-схемой последовательности операций управления, иллюстрирующей систему для управления позициями суппорта и троса EPB согласно варианту осуществления настоящего изобретения.
[0034] Фиг. 5 является блок-схемой логики применения EPB согласно варианту осуществления изобретения.
[0035] Фиг. 6 является блок-схемой логики освобождения EPB согласно варианту осуществления настоящего изобретения.
[0036] Оптимальный режим осуществления изобретения
[0037] Варианты осуществления, описанные ниже, предоставляются так, что специалисты в области техники могут легко понимать техническую идею настоящего изобретения, и, таким образом, настоящее изобретение не ограничивается ими. Кроме того, сущности, описанные на прилагаемых чертежах, могут отличаться от сущностей, фактически реализованных посредством схематичных чертежей, чтобы легко описывать варианты осуществления настоящего изобретения.
[0038] Следует понимать, что, когда элемент называется соединяемым или соединенным с другим элементом, он может быть непосредственно соединен или соединен с другим элементом, и другие элементы могут также присутствовать между ними.
[0039] Термин "соединение", когда используется в данном документе, означает непосредственно соединение или опосредованное соединение между элементом и другим элементом и может ссылаться на все физические соединения, такие как склеивание, скрепление, прикрепление, связывание и сцепление.
[0040] Сингулярные формы включают в себя множественные формы, пока контекст явно не диктует иное. Следует понимать, что слова "содержащий" или "имеющий" и т.д. означают, что отличительные признаки, числа, этапы, операции, элементы, части или их сочетания присутствуют, и один или более признаков или чисел, этапов, операций, элементов, частей или их сочетаний могут быть добавлены.
[0041] Прежде описания чертежей, те же составные элементы, что и на традиционном уровне техники, будут описаны с помощью тех же ссылочных номеров.
[0042] [0043] Далее в данном документе система для управления позициями суппорта и троса EPB согласно варианту осуществления настоящего изобретения будет описана со ссылкой на фиг. 3 и 4.
[0044] Сначала, будет описана конфигурация системы настоящего изобретения. Фиг. 3 является схематичным чертежом, показывающим конфигурацию системы для измерения тока возбуждения EPB-мотора и числа оборотов EPB-мотора согласно варианту осуществления настоящего изобретения.
[0045] Как показано на фиг. 3, основные составляющие элементы системы настоящего изобретения могут включать в себя приводной мотор 30 актуатора, используемый для зацепления и расцепления стояночного тормоза системы электрического стояночного тормоза (EPB); электронный модуль 40 управления для управления мотором; и аккумулятор 50 транспортного средства для подачи мощности к мотору и электронному модулю управления.
[0046] В частности, в системе настоящего изобретения, электронный модуль 40 управления дополнительно включает в себя блок 100 измерения тока для измерения изменения в токе возбуждения мотора и блок 200 измерения пульсации для приема выходного сигнала мотора и измерения пульсации мотора.
[0047] Для того, чтобы добиваться цели, раскрытой выше в разделе "Техническая проблема", настоящее изобретение имеет техническое решение, что приведение в действие EPB-мотора управляется посредством операции применения EPB и операции освобождения EPB с помощью блока 100 измерения тока и блока 200 измерения пульсации.
[0048] Блок 100 измерения тока настоящего изобретения конфигурируется, чтобы управлять приведением в действие EPB-мотора с помощью пропорционального соответствия между током возбуждения мотора и силой зацепления актуатора в режиме применения EPB. В целом, когда ток возбуждения мотора увеличивается, сила зацепления актуатора увеличивается. Следовательно, сила зацепления актуатора оценивается как ток возбуждения мотора с помощью таких характеристик. Кроме того, возможно предотвращать превышение числа оборотов приводного мотора в режиме применения EPB посредством оцененной силы зацепления актуатора. В частности, блок 100 измерения тока измеряет изменение в токе возбуждения мотора в логике применения EPB. Когда ток мотора превышает особое значение (особую целевую силу зацепления), работа приводного мотора EPB может быть задана, чтобы останавливаться.
[0049] Отдельный датчик нагрузки (например, линейный датчик Холла), традиционно, должен быть предусмотрен, чтобы измерять силу зацепления EPB-актуатора, между тем, настоящее изобретение имеет блок 100 измерения тока, предусмотренный в электронном модуле управления для того, чтобы предоставлять возможность обнаружения токов на одном или обоих концах приводного мотора, в результате чего, возможно эффективно оценивать силу зацепления EPB-актуатора.
[0050] Блок 200 измерения пульсации настоящего изобретения конфигурируется, чтобы управлять приведением в действие EPB-мотора с помощью пропорционального соответствия между величиной вращения приводного мотора и силой зацепления актуатора в режиме освобождения EPB. При этом, блок управления приведением в действие EPB управляет моментом освобождения приводного мотора EPB, как противоположность управлению моментом остановки работы приводного мотора EPB в блоке 100 измерения тока EPB.
[0051] Более конкретно, когда пользователь применяет переключатель для освобождения EPB, величина вращения приводного мотора увеличивается, и зацепление актуатора освобождается. Величина вращения приводного мотора измеряется относительно момента времени, когда зацепление актуатора освобождается, при этом приводной мотор EPB освобождается, когда удовлетворяется предварительно определенное условие освобождения EPB. Например, условие освобождения EPB может быть установлено, когда величина вращения мотора равна или больше величины вращения мотора, установленной в качестве точки освобождения EPB.
[0052] Отдельный датчик нагрузки (например, линейный датчик Холла), традиционно, должен быть также предусмотрен в работе приводного мотора для освобождения EPB, тогда как настоящее изобретение имеет блок 200 измерения пульсации, предусмотренный в электронном модуле управления, так что величина вращения мотора может быть точно измерена, в то же время избегая опасности, такой как ослабление магнитного поля магнита, перегрев мотора, колебание позиции датчика измерения и т.п.
[0053] Чтобы облегчить понимание, блок 200 измерения пульсации будет дополнительно описан.
[0054] Мотор 30, электронный модуль 40 управления и аккумулятор 50 транспортного средства могут быть электрически соединены друг с другом. Мотор 30 приводится в действие посредством получения мощности от аккумулятора транспортного средства. Составляющая пульсации выходного сигнала мотора 30 обнаруживается, для того, чтобы точно оценивать число оборотов мотора 30. Дополнительно, посредством оценки числа оборотов мотора 30, натяжение тормоза может быть оценено, чтобы управлять точной работой EPB-узла.
[0055] Вследствие структурных характеристик мотора 30 особая пульсация существует в форме волны выходного сигнала мотора 30, в которой только сигнал пульсации извлекается посредством блока 200 измерения пульсации.
[0056] Блок 200 измерения пульсации может включать в себя, например, преобразователь истинного среднеквадратичного значения в значение постоянного тока (DC). Преобразователь среднеквадратичного значения в значение постоянного тока является элементом схемы, имеющим трансформатор или датчик, встроенный в него, и может быть преобразователем для извлечения сигнала, который преобразует формы волн всех типов в эффективные значения безотносительно к постоянному току, переменному току, неустановившемуся переменному току и т.п. По меньшей мере, один OP-AMP предусматривается и соединяется с преобразователем истинного среднеквадратичного значения в значение постоянного тока, тем самым, делая возможным извлечение чистой пульсирующей формы волны напряжения.
[0057] Например, число пульсаций измеряется из извлеченного сигнала пульсации, и число оборотов может быть оценено с помощью значений (ротора, статора, фланца, воздушного зазора и величины и формы корпуса), в которых отражается информация для структуры, присущей мотору. В частности, текущее число оборотов приводного мотора оценивается из соотношения между информацией, определенной по структуре, присущей мотору, и приложенному сигналу пульсации.
[0058] Между тем, выходной сигнал мотора 30 может быть либо током, либо напряжением. В частности, пульсация мотора 30, измеряемая посредством блока 200 измерения пульсации настоящего изобретения, может быть составляющей пульсации тока возбуждения или составляющей пульсации напряжения возбуждения.
[0059] Мотор 30 и электронный модуль 40 управления настоящего изобретения могут быть электрически соединены с аккумулятором 50 транспортного средства, чтобы получать мощность, и аккумулятор 50 транспортного средства согласно варианту осуществления может быть соединен с источником питания постоянного напряжения (не показан), приготовленным в транспортном средстве. В целом, сигнал постоянного тока от аккумулятора выпрямляется и затем прикладывается к другим элементам схемы (например, блоку измерения пульсации) через источник питания постоянного напряжения. Непоказанный источник питания постоянного напряжения может быть свободно расположен в любом месте в транспортном средстве и может быть расположен рядом с аккумулятором 50 транспортного средства, или расположен рядом с устройством для обнаружения числа оборотов мотора согласно настоящему изобретению.
[0060] [0061] Далее, будет описана последовательность операций управления для системы настоящего изобретения. Фиг. 4 является блок-схемой последовательности операций управления для системы для измерения тока возбуждения EPB-мотора и числа оборотов EPB-мотора согласно варианту осуществления настоящего изобретения.
[0062] Обращаясь к фиг. 4, настоящее изобретение имеет EPB-переключатель, установленный в транспортном средстве, чтобы задействовать EPB, и выполняет операцию применения EPB и операцию освобождения EPB посредством нажатия на переключатель. Намерение пользователя применить усилие стояночного тормоза может быть непосредственно передано электронному модулю 40 управления согласно срабатыванию EPB-переключателя или может быть опосредованно передано электронному модулю 40 управления через ECU, отдельно предусмотренный в транспортном средстве.
[0063] Более конкретно, EPB-переключатель может быть переключен таким образом, что предоставляет возможность EPB-системе применять стояночный тормоз согласно действию пользователя или предоставляет возможность EPB-системе освобождать стояночный тормоз согласно действию пользователя или предоставляет возможность EPB-системе находиться в нейтральном состоянии согласно случаю.
[0064] Актуатор настоящего изобретения может прикладывать тормозное усилие к стояночному тормозу согласно управлению электронного модуля 40 управления EPB, т.е., удерживать тормозной диск с помощью суппорта и троса.
[0065] Операция применения EPB и операция освобождения EPB, описанные выше, выполняются посредством блока 110 логики применения EPB и блока 210 логики освобождения EPB, предусмотренных в электронном модуле управления, или ECU, отдельно предусмотренного в транспортном средстве. Кроме того, блок 300 логики защиты EPB может быть предусмотрен в электронном модуле управления или ECU настоящего изобретения, чтобы улучшать устойчивость в работе EPB.
[0066] [0067] Наконец, обращаясь к фиг. 5 и фиг. 6, будут описаны логика применения EPB, логика освобождения EPB и логика защиты EPB.
[0068] Фиг. 5 является блок-схемой логики применения EPB согласно варианту осуществления изобретения. Фиг. 6 является блок-схемой логики освобождения EPB согласно варианту осуществления настоящего изобретения.
[0069] Как показано на фиг. 5, способ управления позициями суппорта и троса EPB согласно варианту осуществления настоящего изобретения, в случае режима применения EPB, может включать в себя измерение изменения в токе возбуждения мотора (S510); сравнение измеренного значения тока с предварительно заданным значением тока (S520); и прекращение применения EPB, когда измеренное значение тока превышает предварительно установленное значение тока (S530).
[0070] Когда измеренное значение тока меньше предварительно заданного значения тока, способ возвращается обратно к измерению изменения в токе возбуждения мотора, тем самым, непрерывно измеряя значение тока мотора.
[0071] Когда измеренное значение тока превышает предварительно заданное значение тока, приводной мотор EPB управляется, чтобы останавливаться, тем самым, предотвращая превышение числа оборотов мотора.
[0072] Дополнительно, поскольку логика защиты мотора может содержаться согласно варианту осуществления настоящего изобретения, величина вращения приводного мотора EPB может дополнительно наблюдаться в режиме применения EPB, тем самым, предотвращая превышение числа оборотов или ложное срабатывание.
[0073] Обращаясь к фиг. 6, способ управления позициями суппорта и троса EPB согласно варианту осуществления настоящего изобретения, в случае режима освобождения EPB, включает в себя: измерение величины вращения мотора (S610); определение того, удовлетворяется ли условие освобождения EPB, с помощью измеренной величины вращения (S620); и освобождение приводного мотора EPB, когда условие освобождения EPB удовлетворяется (S630).
[0074] Когда величина вращения мотора измеряется, и затем условие освобождения EPB удовлетворяется, приводной мотор EPB освобождается. Когда условие освобождения EPB не удовлетворяется, способ возвращается обратно к измерению величины вращения мотора. В этом случае условие освобождения EPB может быть установлено как тот же параметр, что и величина вращения мотора. В частности, когда величина вращения мотора равна или больше величины вращения мотора, заданной по точке освобождения EPB, приводной мотор EPB может быть освобожден.
[0075] Дополнительно, логика защиты мотора может быть включена согласно одному варианту осуществления настоящего изобретения, так что интервал времени по профилю тока приводного мотора EPB может быть использован в режиме освобождения EPB, тем самым, предотвращая превышение числа оборотов и ложное срабатывание.
[0076] В то время как блок-схемы последовательностей операций изображают операции на чертежах в конкретном порядке, они показаны ради получения наиболее желаемых результатов и не должны истолковываться как необходимое навязывание таких операций в конкретном порядке или показанном последовательном порядке. Т.е., этапы, описанные по ссылкам S510-S550, могут быть применены на практике таким образом, чтобы быть свободно заменяемыми специалистами в области техники без отступления от рамок изобретения.
[0077] [0078] Спецификация не предназначается, чтобы ограничивать изобретение точной раскрытой формой. В то время как настоящее изобретение было описано в соединении с тем, что в настоящее время рассматривается как практические примерные варианты осуществления, следует понимать, что изобретение не ограничивается описанными вариантами осуществления, а, напротив, изменения и модификации могут быть выполнены.
[0079] Рамки настоящего изобретения определяются скорее прилагаемой формулой изобретения, чем подробным описанием, и все изменения или модификации, полученные из значения и диапазона формулы изобретения и ее эквивалентов, должны интерпретироваться как включенные в рамки настоящего изобретения.
Промышленная применимость
[0080] Согласно варианту осуществления настоящего изобретения, как описано выше, число оборотов EPB-мотора может быть точно измерено без использования магнита или линейного датчика Холла, когда используется EPB-мотор.
[0081] Дополнительно, поскольку магнит и линейный датчик Холла не предусматриваются, вес EPB-актуатора может быть уменьшен, актуатор может быть легко спроектирован, и стоимость продукта может быть уменьшена.
[0082] С помощью системы согласно варианту осуществления настоящего изобретения позиции суппорта и троса EPB могут точно управляться.
[0083] Кроме того, посредством предоставления логики защиты EPB, существует преимущество в том, что устойчивость добавляется к приводу EPB-системы.
[0084] Соответственно, настоящее изобретение имеет промышленную применимость благодаря своим преимуществам и различным результатам по сравнению с предшествующим уровнем техники.
Настоящее изобретение относится к системе для управления позициями суппорта и троса электрического стояночного тормоза (EPB). Согласно варианту осуществления настоящего изобретения система для управления позициями суппорта и троса EPB содержит: приводной мотор актуатора, используемый для зацепления и расцепления стояночного тормоза EPB-системы; электронный модуль управления для управления мотором; и аккумулятор транспортного средства для подачи мощности к мотору и электронному модулю управления, при этом электронный модуль управления включает в себя блок измерения пульсации для измерения пульсации мотора посредством приема выходного сигнала мотора и блок измерения тока для измерения изменения в токе возбуждения мотора. Технический результат - предоставление системы для управления позициями суппорта и тормоза EPB без отдельного предоставления магнита и датчика Холла. 2 н. и 4 з.п. ф-лы, 6 ил.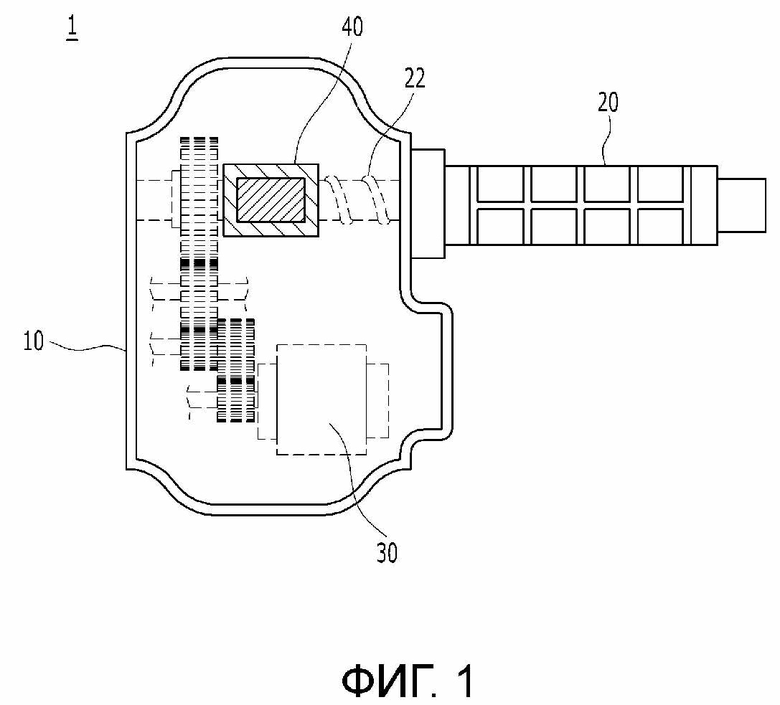
1. Система для управления позициями суппорта и троса электрического стояночного тормоза (EPB), причем система содержит:
приводной мотор (30) актуатора, используемый для зацепления и расцепления стояночного тормоза EPB-системы;
электронный модуль (40) управления для управления мотором; и
аккумулятор (50) транспортного средства для подачи мощности к мотору и электронному модулю управления, при этом электронный модуль (40) управления включает в себя блок (100) измерения тока для измерения изменения в токе возбуждения мотора и блок (200) измерения пульсации для измерения пульсации мотора посредством приема выходного сигнала мотора,
причем электронный модуль (40) управления управляет приводным мотором (30) актуатора через режим применения EPB для зацепления стояночного тормоза или режим освобождения EPB для расцепления стояночного тормоза,
причем в режиме применения EPB электронный модуль (40) управления управляет моментом остановки приводного мотора (30) актуатора на основе приводного тока приводного мотора (30) актуатора, измеренного блоком (100) измерения тока, и
причем в режиме освобождения EPB электронный модуль (40) управления управляет моментом освобождения приводного мотора (30) актуатора на основе пульсации приводного мотора (30) актуатора, измеренной блоком (200) измерения пульсации.
2. Система по п. 1, в которой выходной сигнал мотора выводится как любая одна форма тока или напряжения.
3. Система по п. 1, при этом система включает в себя блок (300) логики защиты EPB.
4. Способ управления позициями суппорта и троса EPB с помощью системы по любому из пп. 1-3, в случае режима применения EPB, причем способ содержит этапы, на которых:
измеряют изменение в токе возбуждения мотора;
сравнивают измеренное значение тока с предварительно заданным значением тока; и
прекращают применение EPB, когда измеренное значение тока превышает предварительно заданное значение тока,
причем предварительно заданное значение тока соответствует определенной целевой силе зацепления стояночного тормоза, полученной с помощью пропорциональной корреляции между приводным током приводного мотора актуатора и силой зацепления стояночного тормоза, и,
в случае режима освобождения EPB, способ содержит этапы, на которых:
измеряют составляющую пульсации приводного тока мотора;
оценивают величину вращения мотора с помощью составляющей пульсации приводного тока;
определяют, удовлетворяется ли условие освобождения EPB с помощью пропорциональной корреляции между величиной вращения двигателя и силой зацепления стояночного тормоза; и
освобождают приводной мотор EPB, когда условие освобождения EPB удовлетворяется.
5. Способ по п. 4, дополнительно содержащий этап, на котором:
наблюдают за величиной вращения приводного мотора EPB, чтобы предотвращать превышение числа оборотов или ложное срабатывание, в режиме применения EPB.
6. Способ по п. 4, дополнительно содержащий этап, на котором:
используют интервал времени по профилю тока приводного мотора EPB, чтобы предотвращать превышение числа оборотов или ложное срабатывание, в режиме освобождения EPB.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| KR 20100108013 A, 06.10.2010 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| KR 20110125378 A, 21.11.2011 | |||
| ДИСКОВЫЙ ТОРМОЗ | 2000 |
|
RU2246053C2 |

