Описываемое изобретение относится к способам поражения морских целей в отдаленных районах, в частности к способам применения морских мин, доставляемых в район минной постановки носителями-транспортировщиками и являющихся средствами дистанционного минирования.
К классу средств дистанционного минирования относятся самотранспортирующиеся мины (СТМ), носителями-транспортировщиками которых являются торпеды и необитаемые подводные аппараты (НПА).
Известны, например, самотранспортирующаяся лодочная мина SLMM (Submarine-Launched Mobile Mine) [1] и НПА - транспортировщик мин «Manta» [2]. СТМ пользуются наибольшим вниманием при постановке активных минных заграждений в районах, контролируемых силами противника, вблизи подходов к портам и военно-морским базам, а также в узкостях. Находят они применение и при создании оборонительных минных заграждений.
Главным недостатком СТМ является сравнительно малая дальность транспортировки мин, составляющая несколько десятков километров, определяемая энергетическим запасом носителя. Так, лодочная самоходная мина Mk67 (SLMM) ВМС США, переделанная из торпеды Mk37, имеет дальность транспортировки в несколько десятков километров [3]. Требуемые дальности транспортировки мин определяются географическими размерами и удаленностью районов боевых действий на море, измеряемыми сотнями и тысячами километров.
Другим недостатком СТМ является их акустическая заметность на этапе доставки в район минной постановки, обусловливаемая работой двигательной установки носителя-транспортировщика - торпеды или НПА.
Известны подводные аппараты с переменной плавучестью - планеры-глайдеры [3], [4], [5], [6], которые перемещаются, периодически изменяя свою плавучесть таким образом, что их массовая плотность становится меньшей или большей, чем плотность окружающей океанской воды. Управление плавучестью глайдера с одновременным перемещением полезного груза для изменения дифферента приводит к его поступательному движению в воде с плавным скольжением и периодическими всплытиями и погружениями.
Так, глайдер «Scarlet Knight» за 221 сутки пересек Атлантику между США и Европой, пройдя расстояние 7500 км со средней скоростью 1,4 км/час [3]. Для связи, уточнения текущих координат и внесения изменений в маршрутное задание использовался спутниковый модем.
Применяя в качестве транспортировщика мины подводный аппарат с переменной плавучестью (глайдер), получают самотранспортирующуюся мину-глайдер (СТМГ) с новым качеством: увеличенной дальностью и высокой скрытностью действия.
Применение СТМ, способных к скрытному автономному переходу на большие расстояния в запрограммированный район, повышает эффективность минных заграждений и снижает боевые потери своих сил.
Преимуществами СТМГ перед СТМ-торпедой или СТМ-НПА являются:
1) превосходство на один-два порядка в дальности транспортировки мины в район постановки, измеряемой сотнями и тысячами километров;
2) полная скрытность вследствие отсутствия акустического излучения.
Недостаток СТМГ состоит в малой, порядка 1-2 уз, скорости транспортировки. Это определяет место таких мин в подготовительный (угрожаемый) период, а также при длительном ведении военных действий. Влияние этого недостатка может быть частично снижено за счет старта СТМГ с корабля-постановщика вблизи районов минных постановок.
Современное качество минных постановок характеризуется шириной, глубиной и вертикальной толщиной, а также маневренностью минных заграждений, состоящей в способности изменения координат согласно оперативно-тактической обстановке [7, с. 249].
Целью изобретения является разработка способа дистанционного минирования, при котором достигается обеспечение маневренности минного заграждения путем осуществления маневрирования мины в заданном районе, в соответствии с установленной в ее систему управления программой, и дистанционное управление миной (минным заграждением) с командного пункта, включающее управление состоянием мин «опасно-безопасно-ликвидация» и их перемещение в районе с целью изменения характеристик минного заграждения - его ширины, глубины и толщины, а также координат согласно оперативно-тактической обстановке.
Поставленная цель достигается применением способа дистанционного минирования, который заключается в том, что осуществляют подготовку самотранспортирующейся мины-глайдера (СТМГ) к пуску, в ходе которой производят ее балластировку, настраивают органы управления, проверяют работу бортовой системы управления, вводят в нее программу движения СТМГ в район минирования и программу движения на маневренной позиции, производят действия по окончательной подготовке мины или минного модуля, предусматривающие приведение ее (его) в боевую готовность, вводят в систему управления мины задание, осуществляют пуск СТМГ, после пуска СТМГ задействуют бортовой источник тока и включают бортовую систему управления в работу, по командам которой управляют работой органов управления СТМГ для осуществления движения в район минирования, в бортовой системе управления рассчитывают траекторию СТМГ, сравнивают ее с программной и вырабатывают необходимую корректуру движения, уточняют географические координаты СТМГ и отклонение их от расчетных с помощью навигационных приборов космической или радионавигационной систем, по командам с носителя или командного пункта осуществляют дистанционное управление состоянием СТМГ, в районе минирования определяют маневренную позицию для каждой мины, осуществляют маневрирование каждой СТМГ на маневренной позиции в соответствии с установленной программой или по командам с командного пункта с целью изменения характеристик минного заграждения - ширины, глубины и вертикальной толщины, а также координат согласно оперативно-тактической обстановке, и приведения мин в нужный момент в боевое состояние путем включения боевого канала и удержания СТМГ на заданном углублении за счет периодического изменения дифферента на всплытие и погружение в заданном месте и за счет задания циркуляции минимального радиуса, и так до срабатывания мины у корабля противника, или смены района расположения минного заграждения, или отмены минной постановки с ликвидацией или возращением СТМГ в заданный район поиска, подъема и приведения в исходное состояние.
О соответствии предложенного технического решения условию патентоспособности «новизна» свидетельствуют сведения, приведенные в табл. 1.
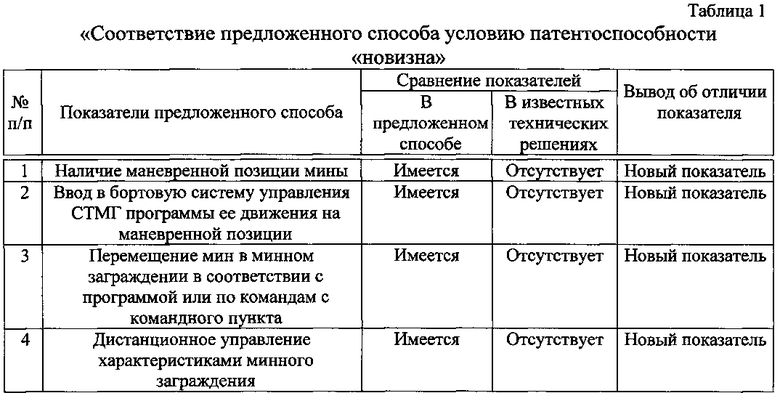
Предложенный способ соответствует условию патентоспособности «новизна», так как ни один из отличительных признаков в известных способах не обнаружен.
Достижение положительного эффекта при осуществлении предложенных способов подтверждается сведениями, приведенными в табл. 2.
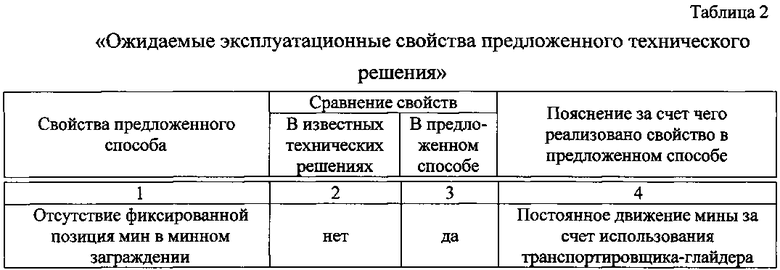
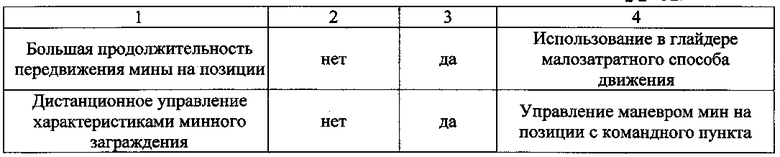
Применение рассмотренного выше способа дистанционного минирования позволит выставлять в районах действия сил противника маневренные минные заграждения и дистанционно управлять их характеристиками.
Источники информации
1. Скоп Д. Барлсон, Дэвид Э. Эверхарт и Скотт К. Трувер. Новейшая система подводного оружия - ключевой фактор трансформации войны на море: Пер. с англ./ Источник: Naval Engineers Journal, 2012, март, №124-1, с. 57-64. - СПб: НИИ КиВ ВМФ ВУНЦ ВМФ «Военно-морская академия», 2013. 17 с.
2. Дайджест зарубежной прессы. ВМС и кораблестроение. Вып. 1-69. - СПб: ЦНИИ им. А.Н. Крылова. 1991-2014.
3. Электронный ресурс http://rucool.marine.rutgers.edu/atlantic/about_gliders.html].
4. Наступает эпоха подводных разведпланеров. http://pics.rbc.ru/img/cnews/2009/12/14/gl1.ipg.
5. Подводные роботы: новые перспективы. http://filearchive.cnews.ru/img/onews/2009/12/14/100559.13238_real.jpg.
6. Новый подводный робот: экономный и бесшумный. http://www.infoture.ru/article/294.
7. Военно-морской словарь /Гл. ред. В.Н. Чернавин. - М.: Воениздат, 1989. - 511 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО МИНИРОВАНИЯ | 2016 |
|
RU2652610C1 |
| СПОСОБ ОХРАНЫ ПОДВОДНОГО ОБЪЕКТА | 2016 |
|
RU2659213C2 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
| СПОСОБ ДИСТАНЦИОННОГО МИНИРОВАНИЯ | 2018 |
|
RU2707494C1 |
| ДИСТАНЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ МОРСКИМИ МИНАМИ | 2019 |
|
RU2726673C1 |
| СПОСОБ ПРИМЕНЕНИЯ МИНЫ | 2014 |
|
RU2562008C1 |
| РАДИОБУЙ ПОДВОДНОЙ ЛОДКИ | 2017 |
|
RU2688544C1 |
| УСТРОЙСТВО ЗАЩИТЫ КОРАБЛЯ ОТ ТОРПЕДЫ | 2018 |
|
RU2703832C1 |
| СПОСОБ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ КОРАБЛЯ ИЛИ ПОДВОДНОЙ ЛОДКИ | 2015 |
|
RU2639298C2 |
Изобретение относится к способам поражения морских целей в отдаленных районах. Способ дистанционного минирования заключается в осуществлении подготовки самотранспортирующейся мины-глайдера (СТМГ) к пуску путем балластировки, настройки органов управления, проверки бортовой системы управления. В бортовую систему управления вводят программу движения СТМГ в район минирования и программу движения на маневренной позиции. Вводят в систему управления мины задание, осуществляют пуск СТМГ. После пуска СТМГ задействуют бортовой источник тока и включают бортовую систему управления, по командам которой управляют работой органов управления СТМГ для осуществления движения в район минирования. В бортовой системе управления рассчитывают траекторию СТМГ, сравнивают ее с программной и вырабатывают необходимую корректуру движения, в районе минирования определяют маневренную позицию для каждой мины. Техническим результатом изобретения является минирование в районах действия сил противника и дистанционное управление характеристиками маневренных минных заграждений. 2 табл.
Способ дистанционного минирования, включающий подготовку самотранспортирующейся мины-глайдера (СТМГ) к пуску, в ходе которой производят ее балластировку, настраивают органы управления, проверяют работу бортовой системы управления, вводят в нее программу движения СТМГ в район минирования, производят действия по окончательной подготовке мины (минного модуля), предусматривающие приведение ее в боевую готовность и ввод в систему управления мины задания, осуществляют пуск СТМГ, после пуска СТМГ задействуют бортовой источник тока и включают бортовую систему управления в работу, по командам которой управляют работой органов управления СТМГ для осуществления движения в район минирования, в бортовой системе управления рассчитывают траекторию СТМГ, сравнивают ее с программной и вырабатывают необходимую корректуру движения, уточняют географические координаты СТМГ и отклонение их от расчетных с помощью навигационных приборов космической или радионавигационной систем, по командам с носителя или командного пункта осуществляют дистанционное управление состоянием СТМГ, отличающийся тем, что в районе минирования определяют маневренную позицию для каждой мины, в бортовую систему управления самотранспортирующейся мины-глайдера дополнительно вводят программу движения на маневренной позиции, осуществляют маневрирование СТМГ на маневренной позиции в соответствии с установленной программой или по командам с командного пункта с целью изменения характеристик минного заграждения - ширины, глубины и вертикальной толщины, а также координат согласно оперативно-тактической обстановке, и приведения мин в нужный момент в боевое состояние путем включения боевого канала и удержания СТМГ на заданном углублении за счет периодического изменения дифферента на всплытие и погружение и в заданном месте за счет задания циркуляции минимального радиуса, и так до срабатывания мины у корабля противника, или смены района расположения минного заграждения, или отмены минной постановки с ликвидацией или возращением СТМГ в заданный район поиска, подъема и приведения в исходное состояние.
| DE 4300497 A1, 28.11.1996 | |||
| US 20050109259 A1, 26.05.2005 | |||
| Оборудование к самоходному шасси для поверхностного внесения минеральных удобрений и погрузки их в кузов самосвальной тележки | 1958 |
|
SU122970A1 |

