1. Самотранспортирующаяся мина-глайдер
Описываемое изобретение относится к средствам поражения морских целей в отдаленных охраняемых районах.
Известны самотранспортирующиеся мины SLMM (Submarine-Launched Mobile Mine) - лодочная самоходная мина [1].
Самотранспортирующиеся мины (СТМ) пользуются наибольшим вниманием при постановке активных минных заграждений в районах, контролируемых силами противника, вблизи подходов к портам и военно-морским базам, а также в узкостях. Находят они применение и при создании оборонительных минных заграждений.
Применение СТМ, способных к автономной транспортировке на большие расстояния в запрограммированный район, позволяет ставить активные минные заграждения (МЗ) с соблюдением мер скрытности, что повышает эффективность МЗ и снижает боевые потери кораблей-постановщиков мин.
Главным недостатком СТМ является сравнительно малая дальность транспортировки мин, определяемая энергетическим запасом торпеды или носителя-транспортировщика на базе необитаемого подводного аппарата (НПА). Так лодочная самоходная мина Мк67 (SLMM) ВМС США, переделанная из торпеды Мк37, имеет дальность транспортировки в несколько десятков километров. Требуемые дальности транспортировки мин определяются географическими размерами и удаленностью районов боевых действий на море, измеряемыми сотнями и тысячами километров.
Другим недостатком СТМ является их акустическая заметность на этапе доставки в район минной постановки, обусловливаемая работой двигательной установки торпеды или НПА-носителя-транспортировщика.
Известны подводные планеры-глайдеры [2], [3], [4], [5] которые перемещаются, периодически изменяя свою плавучесть таким образом, что их массовая плотность становится меньшей или большей, чем плотность окружающей океанской воды. Плотность изменяется путем продвижения маленького поршня в направляющем цилиндре вперед и назад, что изменяет соотношение между пустой и наполненной забортной водой полостями направляющего цилиндра. Для планера Slocum изменение объема приблизительно равно половине чашки воды, что требует ничтожных затрат энергии и позволяет осуществлять периодический процесс изменения массовой плотности глайдера в течение многих суток и даже недель и месяцев. В качестве движущей силы в глайдере используют разность между гравитационной силой притяжения и выталкивающей силой Архимеда. Глайдер «Scarlet Knight» за 221 сутки пересек Атлантику между США и Европой по параллели около 40°, пройдя расстояние 7500 км со средней скоростью 1,4 км/час [3]. Он имел массу 60,6 кг, массу батареи 23,8 кг, среднюю массовую плотность 1025 кг/м3, что близко к средней плотности воды в Северной Атлантике, и длину 2,34 м. Для связи, уточнения текущих координат и внесения изменений в маршрутное задание использовался спутниковый модем.
Известна самотранспортирующаяся мина-глайдер (СТМГ) [6], которая представляет собой самотранспортирующуюся мину (СТМ), включающую подводный транспортировщик-глайдер с пустотелым крылом и отсек с миной или минным модулем (ММ). Устройство СТМГ обеспечивает поступательное скольжение в воде по пологой траектории погружения или всплытия и необходимый для транспортирования мины запас положительной плавучести, в качестве органов управления движением в ней применяют водозаборник, перемещаемый контейнер с грузом, горизонтальные и вертикальный рули. Суммарная средняя массовая плотность СТМГ соответствует средней плотности морской воды в районе использования, то есть СТМГ имеет нулевую плавучесть. Эту плотность регулируют по командам бортовой системы управления глайдера (БСУГ) в процессе движения, а также при приготовлении СТМГ к пуску. На траектории движения регулировку осуществляют с помощью водозаборника, установленного в головной части, который представляет собой цилиндр с решетчатой крышкой и поршнем с электроприводом, управляемым по сигналам БСУГ. Положение поршня в цилиндре определяет количество принятой в корпус глайдера воды и тем самым суммарную массовую плотность или плавучесть СТМГ, а также величину смещения центра масс СТМГ вдоль продольной оси и дифферент или угол тангажа. Перемещая поршень в крайние положения добиваются поочередного изменения плавучести СТМГ и ее дифферента, в результате чего СТМГ производит периодическое постепенное всплытие или погружение с поступательным скольжением в воде. В качестве груза, перемещаемого в контейнере с электроприводом используют источник тока, БСУГ или другие приборы. Контейнер с грузом и электроприводом, передвигаемый по направляющим в сторону носовой или кормовой оконечностей вдоль продольной оси глайдера, является дополнительным органом управления и используется, когда хода поршня водозаборника недостаточно для создания требуемых углов дифферента.
Глайдер имеет источник тока, служащий для обеспечения энергией БСУГ, приборов и механизмов, курсоуказатель, гидростат, датчик гидродинамического давления, горизонтальный и вертикальный рули с электроприводами, датчики дифферента и крена.
Курсоуказатель определяет курс СТМГ, гидростат - глубину погружения, датчик гидродинамического давления - скорость движения, датчики дифферента и крена - его пространственную ориентацию, рули обеспечивают маневр СТМГ по глубине и курсу. Показания приборов считываются в электронной форме, аналогично оптоэлектронному кренометру [7].
Плавучесть СТМГ регулируют в ходе предварительной подготовки к пуску, для чего в корпусе или пустотелом крыле размещают регулировочную емкость с заливной горловиной. Перед пуском производят обнуление плавучести СТМГ путем заполнения регулировочной емкости забортной водой при среднем положении поршня в цилиндре водозаборника. Количество заливаемой воды приводят в соответствие с плотностью воды в предполагаемом районе действий.
Глайдер имеет устройство приема сигналов телеуправления с командного пункта, навигационные приборы с GPS/ГЛОНАСС-приемником, по показаниям которых в БСУГ вырабатывают команды для корректуры траектории. Сигналы телеуправления принимают от радиогидроакустического буя управления (РГБУ) по радиогидроакустическому модему [11], [12].
Дополнительно глайдер оснащают устройством для обозначения его местонахождения, включающим катушку с тросом, газогенератор и надувной поплавок с радиомаяком или радиотехническим отражателем, облегчающими обнаружение поплавка при поиске. Устройство включают по команде системы телеуправления [6].
Отделение мины от глайдера производится в назначенной точке с помощью устройства крепления и отделения ММ, оборудованного кабелем электрической и информационной связи с глайдером [6].
При необходимости СТМГ разрушают и затапливают с помощью устройства ликвидации, состоящего из герметичной пробки с пиропатроном, нарушающим ее целостность, и пиропатрона для подрыва бортовой системы управления. Ликвидацию СТМГ производят по команде БСУГ или с КП [6].
Минный модуль также имеет бортовую систему управления (БСУ), которая по команде с КП переводит его в состояние «опасно», «безопасно» или «ликвидация». Для передачи команды используют шифровой заряд взрывного источника звука (ВИЗ) [10] или РГБУ, доставляемые органом управления в район минной постановки.
Преимуществами СТМГ перед СТМ являются:
1) превосходство на один-два порядка в дальности транспортировки мины в район постановки;
2) полная скрытность вследствие отсутствия акустического излучения.
Недостатком СТМГ является ее малая скорость движения. Это определяет место СТМГ в предвоенный или угрожаемый период, а также при длительном ведении военных действий.
Другими недостатками СТМГ являются невозможность их постановки на заданное углубление для контроля приповерхностных слоев морской поверхности в глубоководных районах, а также ограниченная автономность, определяемая временем разряда бортового источника тока.
Целью изобретения является разработка самотранспортирующейся мины-глайдера, позволяющей осуществлять дистанционную постановку мины и минного заграждения в удаленном районе, на заданном углублении, а также заряжать бортовой источник тока в процессе движения на маршруте.
Поставленная цель достигается благодаря тому, что предлагается самотранспортирующаяся мина-глайдер, включающая транспортировщик-глайдер и отсек с миной или минным модулем (ММ), отличающаяся тем, что глайдер имеет солнечную батарею для подзарядки источника тока в светлое время суток при всплытии на малую глубину, оптический датчик и шумопеленгатор для контроля окружающего пространства, поплавковый якорь для постановки мины во льдах на заданном углублении, который включает поплавок, газогенератор, катушку с минрепом и стопор.
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в таблице 1.
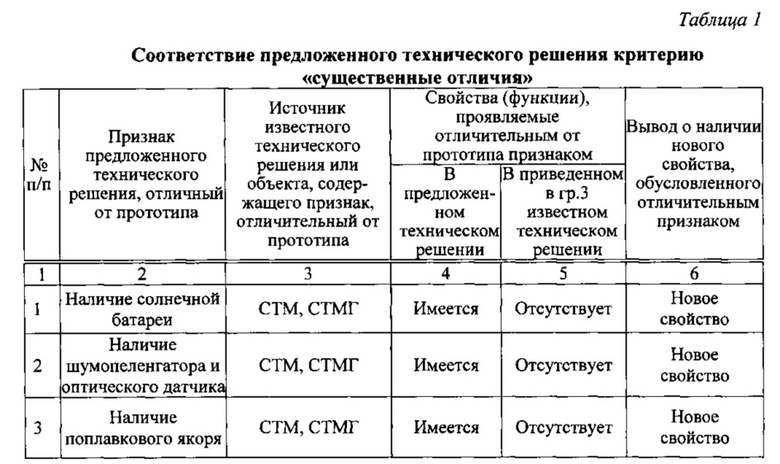
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известном устройстве не обнаружен.
Достижение положительного эффекта при осуществлении предложенного устройства подтверждается сведениями, приведенными в таблице 2.
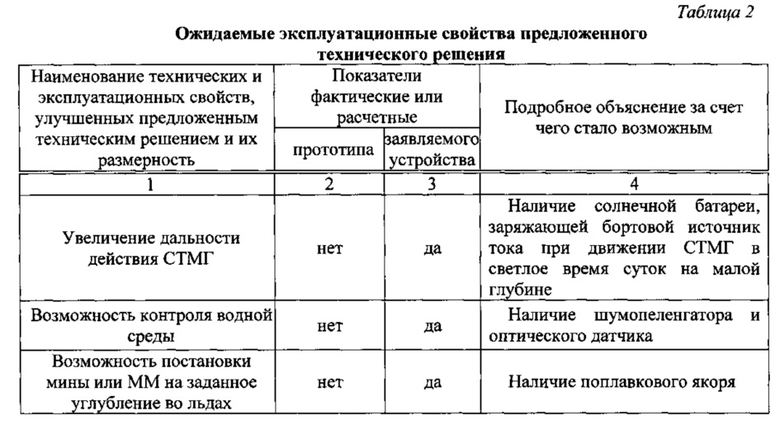
Использование предлагаемой СТМГ позволит производить скрытную постановку мин, увеличить дальность минной постановки, контролировать водное пространство на маршруте движения, а также ставить мины на заданное углубление подо льдом.
2. Способ постановки самотранспортирующейся мины-глайдера
Описываемое изобретение относится к способам поражения морских целей в отдаленных охраняемых районах.
Известен способ постановки самотранспортирующейся мины-глайдера (СТМГ), который включает [6]: подготовку СТМГ к пуску на надводном или подводном носителе, в ходе которой заливают в регулировочную емкость через заливочную горловину забортную воду в количестве, соответствующем плотности воды в предполагаемом районе действий, устанавливают поршень в цилиндре водозаборника в среднее положение, обеспечивая тем самым нулевую плавучесть СТМГ и отсутствие дифферента, проверяют работу БСУГ и вводят в нее программу движения СТМГ в заданный район, производят действия по окончательной подготовке мины или минного модуля, включающие приведение ММ в боевую готовность и ввод в систему управления ММ задания, осуществляют пуск СТМГ. После пуска СТМГ задействуют бортовой химический (ХИТ) или другой источник тока и включают БСУГ в работу. По команде БСУГ поршень цилиндра водозаборника перемещают в крайнее заднее положение, заполняют емкость цилиндра забортной водой, в результате чего СТМГ получает незначительную отрицательную плавучесть, дифферент на нос и начинает плавное погружение, то есть скольжение по наклонной траектории под действием преобладающей гравитационной силы. В случае, когда вследствие внешних условий (сильного течения или других возмущающих факторов) дифферент СТМГ недостаточен, БСУГ выдает команду на электропривод для перемещения контейнера с ХИТ, БСУГ или другим грузом по направляющим в сторону носовой оконечности, а также на отклонение горизонтальных рулей в положение «на погружение». Таким образом, СТМГ начинает поступательное движение в виде планирования в воде с постепенным заглублением. При достижении нижней границы рабочего диапазона глубин и в соответствии с сигналом гидростата БСУГ выдает команду на перемещение поршня цилиндра водозаборника в крайнее переднее положение. Вода вытесняется из цилиндра водозаборника через решетчатую крышку наружу, СТМГ получает незначительную положительную плавучесть, дифферент на корму и начинает поступательное движение вперед с постепенным всплытием под действием преобладающей силы Архимеда. В случае, когда вследствие внешних условий дифферент СТМГ для всплытия недостаточен, БСУГ выдает команду на электропривод для перемещения контейнера с ХИТ, БСУГ или другим грузом по направляющим в сторону кормовой оконечности и на горизонтальные рули в положение «на всплытие». Таким образом, осуществляют управление траекторией СТМГ в продольной плоскости путем плавного всплытия или погружения при общем поступательном движении. В горизонтальной плоскости управление движением СТМГ по заданному направлению осуществляют вертикальным рулем. В качестве органов управления движением СТМГ используют поршень цилиндра водозаборника, электропривод перемещения контейнера с ХИТ, БСУГ или другим грузом, горизонтальными и вертикальным рулями.
На маршруте движения в БСУГ глайдера производят постоянный расчет траектории по данным курсоуказателя, гидростата, датчиков гидродинамического давления, дифферента и крена. Результаты расчета сравнивают с программной траекторией и вырабатывают в БСУГ корректирующие сигналы для коррекции траектории.
Посредством навигационных приборов GPS/ГЛОНАСС-приемников, устанавливаемых на глайдере, в БСУГ производят уточнение географических координат, отклонение их от расчетных и вырабатывают команды по корректуре траектории.
При столкновении СТМГ с подводным препятствием осуществляют маневр обхода препятствия путем всплытия, погружения или отворота в сторону.
По командам с носителя или КП, принимаемым устройством приема сигналов телеуправления по радиотехническому или гидроакустическому каналам связи, осуществляют дистанционное управление глайдером по изменению маршрута движения и переключения состояний мины («опасно», «безопасно», «ликвидация»), при возникновении аварийной ситуации и для предотвращения захвата СТМГ противником осуществляют ликвидацию глайдера (ММ), для поиска глайдера включают устройство обозначения его местонахождения. Для дистанционного управления используют шифровой заряд со взрывным источником звука (ВИЗ) [10] или РГБУ, сигналы управления на который передают по радиоканалу и ретранслируют на СТМГ по гидроакустическому каналу (акустическому модему) [11], [12].
С прибытием СТМГ в заданный район (точку) осуществляют сброс мины (ММ) в соответствии с программой или погружают СТМГ на грунт.
В случаях осуществления противником попыток захватить обнаруженный глайдер (ММ), а также при возникновении аварийной ситуации, по команде БСУГ, производят самоликвидацию глайдера (ММ) подрывом или затоплением.
Данный способ имеет свои недостатки. Так, при движении по маршруту СТМГ не осуществляет контроль окружающего пространства, в результате чего не способна своевременно реагировать на возможные препятствия. Постепенный разряд бортового источника тока ограничивает дальность применения СТМГ. Отсутствие якоря у мины не позволяет устанавливать ее на заданное углубление.
С целью устранения отмеченных недостатков предлагается способ постановки СТМГ, отличающийся тем, что в процессе движения СТМГ по заданному маршруту производят подзарядку ее источника тока в светлое время суток на малой глубине, контролируют окружающее пространство оптическим датчиком и шумопеленгатором, уклоняются от обнаруженных объектов, которые классифицируют в БСУГ, ставят мину на заданное углубление подо льдом с помощью поплавкового якоря, для чего в точке постановки отделяют мину, имеющую отрицательную плавучесть, от глайдера, подают команду на газогенератор, наполняют газом поплавок, прикрепленный к мине, обеспечивают положительную суммарную плавучесть, снимают стопор катушки и обеспечивают всплытие поплавка и разматывание минрепа на длину, соответствующую заданному углублению мины, фиксируют катушку стопором, всплывший поплавок используют в качестве якоря, который под действием своей положительной плавучести и неровностей нижней поверхности льда сохраняет свое местоположение, глайдер уводят на заданное удаление и затапливают.
Источники информации, использованные при выявлении изобретения и составлении его описания
1. Скоп Д. Барлсон, Дэвид Э. Эверхарт и Скотт К. Трувер. Новейшая система подводного оружия - ключевой фактор трансформации войны на море: Пер. с англ. / Источник: Naval Engineers Journal, 2012, март, №124-1, с. 57-64. - СПб: НИИ КиВ ВМФ ВУНЦ ВМФ «Военно-морская академия», 2013.
2. Электронный ресурс http://rucool.marine.rutgers.edu/atlantic/about_gliders.htmll.
3. Наступает эпоха подводных разведпланеров. http://pics.rbc.ru/img/cnews/2009/12114/gl1.ipg.
4. Подводные роботы: новые перспективы. http://filearchive.cnews.ru/img/onews/2009/12/14/100559.13238_real.jpg
5. Новый подводный робот: экономный и бесшумный. http://www.infuture.ru/article/294
6. В.И. Поленин и др. Самотранспортирующаяся мина-глайдер и способ ее постановки. Заявка на изобретение №2014104395. - М.: ФИПС, 2015. Бюл. №23.
7. Оптоэлектронный кренометр. Патент на изобретение RU 2244259 С1, 18.04.2003.
8. Кудрявцев Г.И., Щетинин A.M. Армирующие химические волокна для композиционных материалов // под ред. Г. И. Кудрявцева. - М.: «Химия», 1992.
9. Мусина Т.К., Волохина А.В., Щетинин A.M. Полиамидные и арамидные волокна и нити со специальными свойствами и изделия на их основе / В мире оборудования, 2010. - http://legprom.bz/.
10. Патент RU 2510355 С2. Реактивный шифровой заряд (варианты) / Новиков А.В., Цапко С.А. - М.: ФИПС, 2014. Бюл. №9.
11. Акустический модем АМ-300. http://www.diveservice.ru/
12. Матвиенко Ю. В. Гидроакустический комплекс навигации подводного робота. Диссертация на соискание ученой степени доктора технических наук. - Владивосток, 2004. http://ww.diwssercat.com/content/gidroakusticheskii-kompleks-navigatsii-podvodnogo-robota#ixzz2fPt3Bsov
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО МИНИРОВАНИЯ | 2015 |
|
RU2600038C1 |
| СПОСОБ ДИСТАНЦИОННОГО МИНИРОВАНИЯ | 2016 |
|
RU2652610C1 |
| СПОСОБ ОХРАНЫ ПОДВОДНОГО ОБЪЕКТА | 2016 |
|
RU2659213C2 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
| РАДИОБУЙ ПОДВОДНОЙ ЛОДКИ | 2017 |
|
RU2688544C1 |
| ДИСТАНЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ МОРСКИМИ МИНАМИ | 2019 |
|
RU2726673C1 |
| ПРОТИВОВОЗДУШНЫЙ (ПРОТИВОКОРАБЕЛЬНЫЙ) АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ПОЗИЦИОННЫЙ ПОДВОДНЫЙ УПРАВЛЯЕМЫЙ ("ПАУК" ППУ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2009 |
|
RU2413156C1 |
| СПОСОБ РЕГИСТРАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ | 2015 |
|
RU2619883C2 |
| СПОСОБ ДИСТАНЦИОННОГО МИНИРОВАНИЯ | 2018 |
|
RU2707494C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
Изобретения относятся к средствам поражения морских целей в отдаленных охраняемых районах и к способам их применения. Самотранспортирующаяся мина-глайдер (СТМГ) включает транспортировщик-глайдер и отсек с миной или минным модулем. Глайдер имеет солнечную батарею для подзарядки источника тока, оптический датчик и шумопеленгатор, поплавковый якорь для постановки мины на заданном углублении подо льдом, прикрепленный к мине, газогенератор, который наполняет газом поплавок, катушку с минрепом и стопор. Для постановки СТМГ в процессе ее движения по заданному маршруту производят подзарядку ее источника тока в светлое время суток на малой глубине. Контролируют окружающее пространство оптическим датчиком и шумопеленгатором. Уклоняются от обнаруженных объектов. Ставят мину на заданное углубление подо льдом с помощью поплавкового якоря. Подают команду на газогенератор, наполняют газом поплавок, прикрепленный к мине, обеспечивают их положительную суммарную плавучесть, снимают стопор катушки и обеспечивают всплытие поплавка и разматывание минрепа на длину, соответствующую заданному углублению мины. Фиксируют катушку стопором, всплывший поплавок используют в качестве якоря, а глайдер уводят на заданное удаление и затапливают. Достигается скрытая и дальняя постановка мин, а также достигается возможность установки мины на заданное углубление подо льдом. 2 н.п. ф-лы, 2 табл.
1. Самотранспортирующаяся мина-глайдер (СТМГ), включающая транспортировщик-глайдер и отсек с миной или минным модулем, отличающаяся тем, что глайдер имеет солнечную батарею для подзарядки источника тока в светлое время суток на малой глубине, оптический датчик и шумопеленгатор для контроля окружающего пространства, поплавковый якорь для постановки мины на заданном углублении подо льдом, содержащий поплавок, прикрепленный к мине, газогенератор, который наполняет газом поплавок, катушку с минрепом и стопор.
2. Способ постановки самотранспортирующейся мины-глайдера (СТМГ), отличающийся тем, что в процессе движения СТМГ по заданному маршруту производят подзарядку ее источника тока в светлое время суток на малой глубине, контролируют окружающее пространство оптическим датчиком и шумопеленгатором, уклоняются от обнаруженных объектов, которые классифицируют в бортовой системе управления, ставят мину на заданное углубление подо льдом с помощью поплавкового якоря, для чего в точке постановки отделяют мину, имеющую отрицательную плавучесть, от глайдера, подают команду на газогенератор, наполняют газом поплавок, прикрепленный к мине, обеспечивают их положительную суммарную плавучесть, снимают стопор катушки и обеспечивают всплытие поплавка и разматывание минрепа на длину, соответствующую заданному углублению мины, фиксируют катушку стопором, всплывший поплавок используют в качестве якоря, который под действием своей положительной плавучести и неровностей нижней поверхности льда сохраняет свое местоположение, глайдер уводят на заданное удаление и затапливают.
| RU 2014104395 A, 20.08.2015 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| РЕАКТИВНЫЙ ШИФРОВОЙ ЗАРЯД (ВАРИАНТЫ) | 2011 |
|
RU2510355C2 |
| US 5163379 A1, 17.11.1992. | |||

