Изобретение относится к железнодорожному транспорту и может быть использовано в любых типах подвижного состава, оборудованного устройствами безопасности, а также на любых типах станций, оборудованных устройствами постовой аппаратуры и автоматического управления тормозами.
Известно «Комплексное локомотивное устройство безопасности унифицированное (КЛУБ-У)» (RU 2248899 C, B61L, 25/04, 27.03.2005 г.), в котором в открытую систему реального времени с модульной архитектурой включены и соединены между собой кабелем системного CAN-интерфейса блоки электроники, индикации, коммутации и ввода данных, расположенные в кабине машиниста. Блок электроники выполнен с возможностью определения допустимого скоростного режима и осуществления контроля за его соблюдением за счет фиксации сигналов обратной связи от рукоятки бдительности машиниста, внутреннего фонового тестирования каждого модуля, а также двухканальной обработки информации и включает в себя два модуля центральной обработки информации, модуль маршрута, модуль цифрового радиоканала, два модуля измерения параметров движения, два модуля внешних устройств, систему контроля безопасности и усилитель электропневматического клапана. Блок индикации выполнен с возможностью подготовки информации, необходимой машинисту, ее регистрации и индикации, взаимодействия с машинистом посредством рукоятки безопасности и кнопок ввода информации, введения и отображения локомотивных и поездных характеристик, текущего времени, фактической скорости и их сохранения при отключении электропитания и включает в себя модуль регистрации, модуль управления и модуль индикации. Блок коммутации выполнен с возможностью включения электропитания устройства, осуществления его связей с периферийной аппаратурой, а также переключения связей при изменении кабины управления локомотивом и включает в себя узел формирования данных о состоянии цепей управления локомотивом.
Недостатком этого устройства является низкая пропускная способность и отказоустойчивость, отсутствие возможности принудительной остановки подвижной единицы по команде дежурного по станции либо поездного диспетчера и всего один канал для передачи значений автоматической локомотивной сигнализации, а также ограниченная функциональность, отсутствие защиты передаваемой информации и высокое влияние человеческого фактора на безопасность движения.
Наиболее близким к предлагаемому изобретению является выбранная в качестве прототипа система передачи информации, используемая в устройстве автоматического управления торможением поезда по патенту RU 2283786, B61T 8/172; B61L 3/12, 01.03.05 г.
Устройство содержит расположенную в начале каждого блок-участка пути передающую антенну, соединенную с генератором, и расположенные на локомотиве приемную антенну, соединенную с блоком приема информации, датчик угла поворота, установленный на буксе колеса и соединенный с входами измерителя пути и измерителя скорости, измеритель эффективности тормозов, блок программной скорости, трехпозиционный релейный элемент. Измеритель эффективности тормозов подключен к выходам измерителя ускорения и датчика давления в тормозной магистрали. Один вход программной скорости соединен с выходом измерителя пути, второй вход - с выходом блока приема информации, третий вход - с выходом измерителя эффективности тормозов. Трехпозиционный релейный элемент подключен к вентилям торможения и отпуска тормозной системы поезда. Устройство направлено на повышение точности регулирования скорости и остановки поезда.
Недостатком используемой в этом устройстве системы передачи информации является ограниченная функциональность, так как путевые генераторы устанавливаются непосредственно на железнодорожных путях лишь в ограниченном количестве мест на станции и имеют кабельное соединение с постовыми устройствами, отсутствие цифрового радиоканала и защиты передаваемой информации.
Техническим результатом изобретения является повышение надежности, расширение функциональных возможностей и упрощение конструкции за счет исключения кабельного соединения для передачи информации.
Технический результат достигается тем, что в системе передачи ответственной информации о маршрутах приема/отправления и кодах АЛС, содержащей в составе стационарной аппаратуры блок радиосвязи стационарный, а на локомотиве блок радиосвязи локомотивный, соединенный с локомотивным устройством безопасности, согласно изобретению в состав локомотивного устройства безопасности включен модуль сравнения сигналов, соединенный своим портом с модулем внешних устройств через CAN шину, а в состав стационарной аппаратуры введен вычислительный комплекс, состоящий из двух серверов, соединенных между собой и подключенных к устройству ввода и вывода информации, каждый из серверов через соответствующий порт соединен с постовыми устройствами системы автоматического управления торможением, а один из серверов дополнительно соединен с коммутатором связи системы передачи данных, при этом блок радиосвязи стационарный состоит из модема, подключенного к одному из серверов, а через дуплексный фильтр - к антенне, блок радиосвязи локомотивный состоит из подключенных к системной плате двух процессоров, CAN модуля, модуля интерфейса RS-232, модуля позиционирования и модуля GSM, соединенного с антенной, с CAN модулем соединены порты локомотивного устройства безопасности, а модуль интерфейса RS-232 соединен с модемом локомотивного устройства безопасности, который подключен через дуплексный фильтр к антенне.
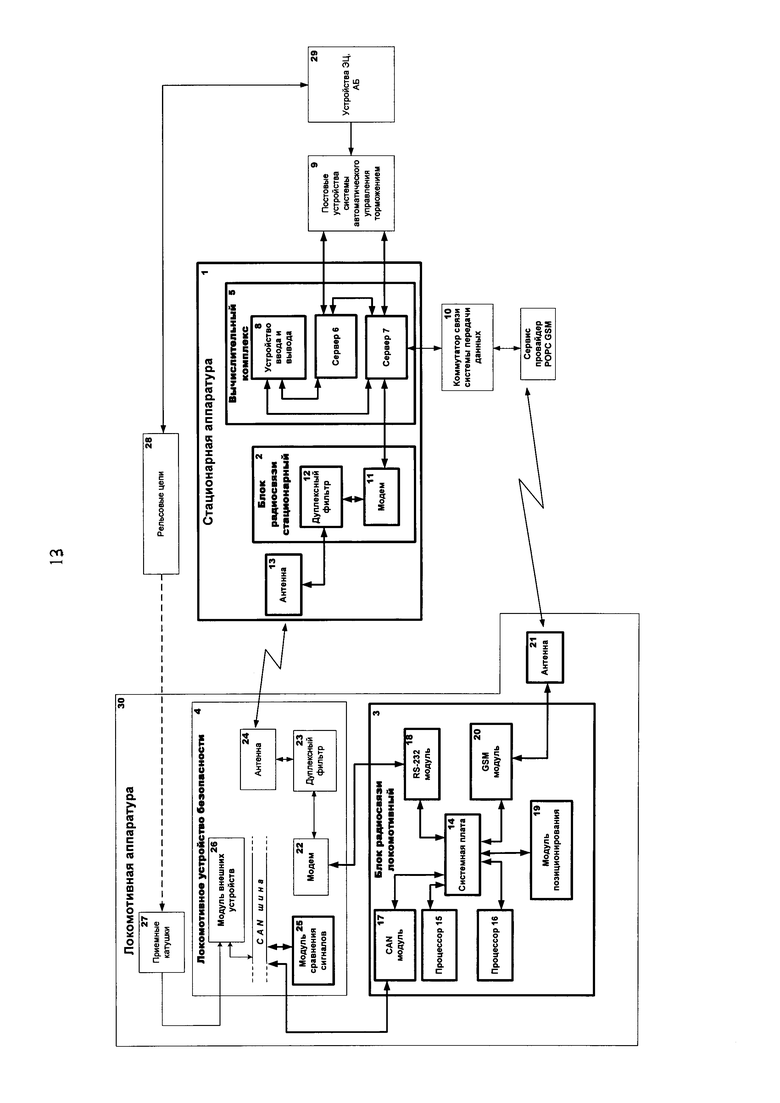
На чертеже приведена функциональная схема системы передачи ответственной информации о маршрутах приема/отправления и кодах АЛС.
Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС содержит в составе стационарной аппаратуры 1 блок 2 радиосвязи стационарный, а на локомотиве блок 3 радиосвязи локомотивный, соединенный с локомотивным устройством 4 безопасности, в состав стационарной аппаратуры введен вычислительный комплекс 5, состоящий из двух серверов 6 и 7, соединенных между собой и подключенных к устройству 8 ввода и вывода информации, каждый из серверов 6 и 7 через соответствующий порт соединен с постовыми устройствами 9 системы автоматического управления торможением, а один из серверов 7 дополнительно соединен с коммутатором 10 связи системы передачи данных, при этом блок 2 радиосвязи стационарный состоит из модема 11, подключенного к одному из серверов 7, а через дуплексный фильтр 12 - к антенне 13, блок 3 радиосвязи локомотивный состоит из подключенных к системной плате 14 двух процессоров 15 и 16, CAN модуля 17, модуля 18 интерфейса RS-232, модуля 19 позиционирования и модуля 20 GSM, соединенного с антенной 21, с CAN модулем 17 соединены порты локомотивного устройства 4 безопасности, а модуль 18 интерфейса RS-232 соединен с модемом 22 локомотивного устройства безопасности, который подключен через дуплексный фильтр 23 к антенне 24, в состав локомотивного устройства 4 безопасности включен модуль 25 сравнения сигналов, соединенный своим портом с модулем 26 внешних устройств через CAN шину.
Блок 2 радиосвязи стационарный предназначен для обмена данными по радиоканалу диапазона 160 МГц и включает в себя дуплексный фильтр 12 и модем 11.
Блок 3 радиосвязи локомотивный предназначен для организации на борту локомотива модемного пула, обеспечения защиты информации, передаваемой по каналам цифровой радиосвязи и предварительной логической обработки данных, включая уточнение позиционирования локомотива, принятых по радиоканалу.
Локомотивное устройство 4 безопасности (КЛУБ-У), предназначенное для обеспечения безопасности движения, по каналу связи соединено со стационарной аппаратурой 1.
Вычислительный комплекс 5 объединяет в себе стационарные устройства, предназначенные для сбора информации о состоянии напольного оборудования станции, местоположения локомотива и его параметров движения, а так же формирования ответственных команд для передачи локомотивному устройству 4 безопасности.
Сервер 6 представляет собой промышленный компьютер с операционной системой Linux реального времени, предназначен для обработки информации о состоянии стрелок и сигналов станции, местоположения подвижных единиц на станции и участках приближения, формирования ответственных команд (маршрутов приема/отправления) для подвижных единиц.
Сервер 7 представляет собой промышленный компьютер с операционной системой Linux реального времени, предназначен для обработки информации о состоянии стрелок и сигналов станции, местоположения подвижных единиц на станции и участках приближения, формирования ответственных команд (маршрутов приема/отправления) для подвижных единиц и служит для проведения сравнения результатов вычислений при формировании ответственных команд.
Устройство 8 ввода и вывода предназначено для проведения пусконаладочных работ, настройки и вывода диагностической информации.
Постовые устройства 9 системы автоматического управления торможением поезда предназначены для сбора и оцифровки данных от электрической централизации станции. В типовых устройствах системы автоматического управления торможением применяются для управления путевыми генераторами, установленными на путях для передачи информации на подвижные единицы.
Коммутатор 10 связи системы передачи данных предназначен для соединения нескольких узлов сети по интерфейсу Ethernet и служит для подключения вычислительного комплекса 5 к сети передачи данных ОАО «РЖД» и к частной сети сервис провайдера POPC GSM.
Модемы 11 и 22 предназначены для приема/передачи информации по каналам радиосвязи в рамках организации локального радиоканала.
Дуплексные фильтры 12 и 23 предназначены для выделения полезного сигнала и подавления помех.
Антенны 13 и 24 являются конечными устройствами антенно-фидерного тракта канала передачи данных 160 МГц.
Системная плата 14 входит в состав блока 3 радиосвязи локомотивного и предназначена для соединения между собой CAN модуля 17, процессора 15, процессора 16, модуля 18 интерфейса RS-232, модуля позиционирования 19 и GSM модуля 20.
Процессоры 15 и 16 предназначены для обработки принятой из каналов радиосвязи информации и формирования данных для локомотивного устройства 4 безопасности.
CAN модуль 17 предназначен для стыковки блока 3 радиосвязи локомотивного с локомотивным устройством 4 безопасности по CAN-шине (межблочный CAN).
Модуль 18 интерфейса RS-232 предназначен для увязки блока 3 радиосвязи локомотивного с внешними устройствами по протоколу RS-232.
GSM модуль 20 предназначен для передачи сообщений по цифровому радиоканалу в GSM диапазоне частот.
Антенна 21 является конечным устройством антенно-фидерного тракта канала передачи данных в GSM диапазоне частот.
Локомотивная аппаратура 30 включает в себя блок 3 радиосвязи локомотивный с антенной 21, локомотивное устройство 4 безопасности, в котором к модулю 26 внешних устройств подключены приемные катушки 27, предназначенные для приема информации посредством рельсовых цепей 28 от устройств 29 электрической централизации (ЭЦ) и автоблокировки (АБ), обеспечивающих организацию безопасного движения на станциях и перегонах.
Модуль 25 сравнения сигналов предназначен для сравнения и выбора актуального и безопасного значения кода автоматической локомотивной сигнализации, информация о котором поступает из приемных катушек 27 и из блока 3 радиосвязи локомотивного.
Модуль 19 позиционирования предназначен для уточнения позиционирования локомотива на основе данных спутниковой навигации, полученных от локомотивного устройства 4 безопасности, и данных, полученных по радиоканалу от стационарной аппаратуры 1.
Модуль 26 внешних устройств входит в состав локомотивного устройства безопасности и предназначен для обработки внешних сигналов, несущих информацию о значении кодов автоматической локомотивной сигнализации, полученных от устройств 29 ЭЦ и АБ через рельсовые цепи 28 с помощью приемных катушек 27.
Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС работает следующим образом.
Система функционирует следующим образом. Дежурный по станции осуществляет формирование маршрута приема/отправления поезда, используя свое автоматизированное рабочее место (на чертеже не показано), при этом устройства 29 ЭЦ и АБ обеспечивают управление и контроль объектов железнодорожной автоматики с соблюдением требований безопасности движения, а постовые устройства 9 системы автоматического управления торможением обеспечивают безопасный съем информации в аналоговом виде о положении стрелок и сигналов на станции, преобразуют его в цифровой формат и передают по двум каналам в сервер 6 и в сервер 7 вычислительного комплекса 5 для формирования пакета ответственной информации для передачи в подвижные единицы, находящиеся на станции. Сервер 6 и сервер 7 параллельно производят формирование пакета ответственной информации. Сформированные независимо друг от друга пакеты информации сравниваются в сервере 7 и в случае их полного совпадения передаются по каналам цифровой радиосвязи. Сигнал с сервера 7 передается через модем 11, дуплексный фильтр 12 и антенну 13 на локомотивную аппаратуру 30 в локомотивное устройство 4 безопасности. Сигнал, принятый антенной 24 через дуплексный фильтр 23 и модем 22, поступает в модуль 18 интерфейса RS-232 блока 3 радиосвязи локомотивного, параллельно по каналу GSM сервер 7 через коммутатор 10 связи системы передачи данных с помощью оборудования сервис провайдера POPC GSM передает сигнал в GSM модуль 20 через антенну 21. Пакеты ответственной информации о состоянии стрелок, сигналов и рельсовых цепей на станции через модуль 18 интерфейса RS-232 и GSM модуль 20 параллельно передаются через системную плату 14 в процессоры 15 и 16, которые независимо друг от друга производят проверку принятой информации на корректность и актуальность, при этом используются данные о текущем времени и местоположении поезда, а также о других параметрах движения, получаемых от локомотивного устройства 4 безопасности по CAN интерфейсу, через CAN модуль 17. Данные о местоположении поезда и занятости рельсовых цепей передаются через системную плату 14 в модуль позиционирования 19, который производит сравнение данных о занятости рельсовых цепей и координате поезда. В случае несовпадения информации о занятости рельсовых цепей, полученной от стационарной аппаратуры 1, с информацией о текущей координате, полученной от локомотивного устройства 4 безопасности, модуль позиционирования 19 производит расчет корректирующих поправок к координате локомотива, которые через системную плату 14 и CAN модуль 17 передаются в локомотивное устройство 4 безопасности для изменения текущей координаты локомотива. Локомотивное устройство безопасности 4 производит корректировку текущей координаты поезда и повторно формирует, данные о текущем местоположении для модуля 19 позиционирования. В случае подтверждения модулем 19 позиционирования корректности координаты, модуль позиционирования формирует команду для процессоров 15 и 16. Осуществление такой корректировки вышеуказанными средствами обусловлено тем, что формирование кодов автоматической локомотивной сигнализации на основе данных, полученных по радиоканалу, возможно лишь при условии точного позиционирования поезда на конкретной рельсовой цепи, а существующие приборы безопасности, имеющие погрешность измерения координаты, не позволяют выполнить это условие. Процессоры 15 и 16 параллельно, независимо друг от друга, производят расчет маршрута приема/отправления и значения кодов автоматической локомотивной сигнализации. Одновременно в модуль 25 сравнения сигналов через CAN шину от модуля внешних устройств 26, через приемные катушки 25 посредством рельсовых цепей 28 передаются значения кодов автоматической локомотивной сигнализации от устройств 29 ЭЦ и АБ. Модуль 25 сравнения сигналов производит сравнение полученных данных от блока 3 радиосвязи локомотивного и приемных катушек 27. В случае совпадения данных о кодах автоматической локомотивной сигнализации, полученных от модуля внешних устройств 26 и блока 3 радиосвязи локомотивного, модуль 25 сравнения сигналов передает эти данные в CAN шину локомотивного устройства 4 безопасности. Тем самым повышается общий уровень безопасности движения, поскольку информация о значениях кодов автоматической локомотивной сигнализации получают и обрабатывают от двух источников, а не от одного, как это реализуется в известных решениях. В случае неисправности модуля 26 внешних устройств или блока 3 радиосвязи локомотивного, информация о значениях кодов автоматической локомотивной сигнализации поступает от исправного модуля или блока, тем самым повышая надежность устройства за счет дополнительного канала передачи данных. В случае если данные о значениях кодов автоматической локомотивной сигнализации различаются, то за истинное значение в соответствии с требованиями и нормами безопасности принимается более запрещающее. Значение кодов автоматической локомотивной сигнализации используются локомотивным устройством 4 безопасности для расчета значений допустимой скорости, а данные о маршруте приема/отправления - для формирования актуального списка впередилежащих препятствий.
Таким образом, в предлагаемой системе обеспечивается непрерывное взаимодействие между стационарной аппаратурой и локомотивной аппаратурой и осуществляется оперативная передача информации о маршруте приема/отправления, показаниях автоматической локомотивной сигнализации и занятости или свободности рельсовых цепей в локомотивное устройство безопасности, которое, в свою очередь, в автоматическом режиме осуществляет переключение номера пути при движении по станции и заблаговременное отображение соответствующих препятствий с актуальными ограничениями скорости и значениями кодов автоматической сигнализации, в том числе и при движении по некодируемым путям. В прототипе передача данных возможна лишь в точках установки путевых генераторов системы автоматического управления торможением поезда, а в переданных данных о маршруте отсутствует информация об объектах и ограничениях скорости на маршруте и значениях кодов автоматической локомотивной сигнализации, и имеется лишь точка остановки поезда. За счет использования радиоканала передачи данных для взаимодействия стационарной аппаратуры и локомотивной аппаратуры происходит сокращение затрат на внедрение системы из-за отсутствия путевых генераторов и кабельных соединений, а также сокращение эксплуатационных расходов на обслуживание. Кроме того, происходит снижение психофизической нагрузки на машинистов и сокращение временных интервалов приема/отправления поезда за счет автоматической работы локомотивной аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| СИСТЕМА ПЕРЕДАЧИ ОТВЕТСТВЕННОЙ ИНФОРМАЦИИ ОТ ПОСТОВОЙ АППАРАТУРЫ В БОРТОВЫЕ УСТРОЙСТВА БЕЗОПАСНОСТИ | 2015 |
|
RU2582323C1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2015 |
|
RU2578638C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте. Система включает стационарную аппаратуру, содержащую вычислительный комплекс, состоящий из двух серверов, соединенных между собой и подключенных к устройству ввода/вывода информации, каждый из серверов соединен с постовыми устройствами системы автоматического управления торможением. Причем один из серверов дополнительно соединен с коммутатором связи системы передачи данных, при этом стационарный блок радиосвязи состоит из модема, подключенного к одному из серверов, а через дуплексный фильтр подключен к антенне. Локомотивный блок радиосвязи состоит из подключенных к системной плате двух процессоров, CAN модуля, модуля интерфейса RS-232 и модуля GSM, соединенного с антенной, с CAN модулем соединены порты локомотивного устройства безопасности, а модуль интерфейса RS-232 соединен с модемом локомотивного устройства безопасности, который подключен через дуплексный фильтр к антенне. Причем в локомотивное устройство безопасности дополнительно включен модуль сравнения сигналов, соединенный с модулем внешних устройств через CAN шину. Достигается повышение надежности системы. 1 ил.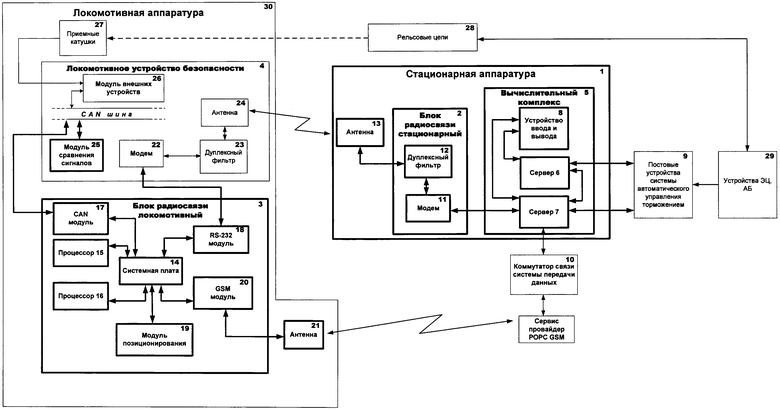
Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС, содержащая в составе стационарной аппаратуры блок радиосвязи стационарный, а на локомотиве - блок радиосвязи локомотивный, соединенный с локомотивным устройством безопасности, отличающаяся тем, что в состав локомотивного устройства безопасности включен модуль сравнения сигналов, соединенный своим портом с модулем внешних устройств через CAN шину, а в состав стационарной аппаратуры введен вычислительный комплекс, состоящий из двух серверов, соединенных между собой и подключенных к устройству ввода и вывода информации, каждый из серверов через соответствующий порт соединен с постовыми устройствами системы автоматического управления торможением, а один из серверов дополнительно соединен с коммутатором связи системы передачи данных, при этом блок радиосвязи стационарный состоит из модема, подключенного к одному из серверов, а через дуплексный фильтр - к антенне, блок радиосвязи локомотивный состоит из подключенных к системной плате двух процессоров, CAN модуля, модуля интерфейса RS-232, модуля позиционирования и модуля GSM, соединенного с антенной, с CAN модулем соединены порты локомотивного устройства безопасности, а модуль интерфейса RS-232 соединен с модемом локомотивного устройства безопасности, который подключен через дуплексный фильтр к антенне.
| СПОСОБ И УСТРОЙСТВО ОБМЕНА ИНФОРМАЦИЕЙ ПО РАДИОКАНАЛУ МЕЖДУ ПОЕЗДНЫМ ЛОКОМОТИВОМ И СТАЦИОНАРНЫМ ПУНКТОМ | 2011 |
|
RU2476342C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2387564C1 |
| DE 19931967 A1, 01.02.2001. | |||

