ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к способу, системе и машиночитаемому носителю для создания имитационной модели движения транспортных и пешеходных потоков, использующейся в тренажерах для обучения вождению.
УРОВЕНЬ ТЕХНИКИ
На сегодняшний день известно множество различных систем и способов для построения имитационной модели для использования в тренажерах обучения вождению.
Пакет TRANSIMS [1] (TRansportation ANalysis and SIMulation System) - часть программы по усовершенствованию модели многополосного автотранспортного движения, выполняемой национальным исследовательским центром Лос-Аламос и оплачиваемой американским Министерством транспорта и Управлением по охране окружающей среды. TRANSIMS моделирует каждую транспортную единицу и оценивает ее движение на протяжении ее движения по назначенному маршруту. Таким образом, TRANSIMS предсказывает поведение каждого участника транспортного потока.
Данная система имеет модульную структуру.
- Модуль "Спрос на движение" генерирует индивидуальные транспортные средства и их движение посредством создания моделей поселений, данные о которых взяты из переписи населения или других источников. При этом модуль генерирует движение каждого транспортного средства.
- Межмодульный "Планировщик маршрута движения" использует определенные на основе демографических и других данных стоимостные показатели движения индивидуально для каждого потребителя транспортного спроса. Он представляет данные оптимальности выбранного способа движения для каждого транспортного средства, сделанные при составлении плана маршрута.
- Блок "Микромоделирование движения" воспроизводит поездки по транспортной сети для прогноза характеристик отдельных транспортных средств и транспортной системы в целом. Он пытается воспроизвести маршрут каждого транспортного средства в масштабе городского региона. Так, например, каждое пассажирское транспортное средство имеет водителя, который реализует собственную логику движения согласно своему маршруту, ускоряя или замедляя движение транспортного средства.
- Блок "Качество воздуха" получает информацию из блока "Микромоделирование движения" и осуществляет оценку экологических показателей. Модель эмиссии оценивает экологические параметры как для транспортных средств, находящихся в движении, так и ожидающих движения. Модули имеют различные обратные связи. Так, незапланированные поездки естественно отражаются на недельной активности. Те поездки, которые в процессе микромоделирования окажутся длиннее, чем это оказалось на самом деле, потребуют корректировки (калибровки модели). То есть модель необходимо постоянно подстраивать под реальную транспортную обстановку. Недостатками модели является отсутствие возможности моделирования пешеходных потоков и воссоздания аварийных ситуаций.
AIMSUN [2] - микроскопическая модель, разработанная в политехническом институте Барселоны, предназначенная для имитации городского и загородного дорожного движения. Включает модели следования и перестроения собственной разработки. Дорожная сеть основана на опорных узлах и связях, описывающих участки дорог между ними. Модель включает представления дорожных светофоров, знаков и дорожной разметки. Концептуальная архитектура системы моделирования AIMSUN показана на рисунке ниже.
Данная модель не предоставляет возможности моделирования пешеходных потоков, а также возможности воссоздания аварийных ситуаций.
Модель VISSIM [3].
VISSIM - это дискретная, стохастическая модель на основе временных шагов, разработанная в университете Karlsruhe в Германии. Участники движения представляются в виде отдельных сущностей. Модель содержит психофизическую модель следования для продольного движения и основанный на правилах алгоритм поперечного движения. Применяемая модель следования основана на модели Wiedmann, которая базируется на предположении, что водитель может находиться в одном из 4-х состояний.
- Свободное движение - не осуществляется влияние впереди идущей машины, водитель стремится поддерживать собственную скорость.
- Приближение - водитель адаптирует собственную скорость к скорости впереди идущей машины путем торможения до безопасной дистанции.
- Следование - водитель следует за машиной без ускорения или торможения.
- Торможение - водитель осуществляет торможение при приближении на расстояние меньшее, чем безопасная дистанция.
В случае движения по многополосной дороге множество иерархически-организованных правил образует модель перестроения.
Данная модель не предоставляет возможности моделирования пешеходных потоков, а также возможности воссоздания аварийных ситуаций.
Модель Paramics [4].
Разработанная в эдинбургском центре по параллельным вычислениям, система имитационного моделирования Paramics использует объединение микроскопических и макроскопических моделей для имитации дорожного движения в масштабе города. Помимо модели следования за лидером и модели перестроения система включает модель обгона по встречной полосе и модель совершения парковки.
Отличительными особенностями системы являются два модуля: динамического выбора маршрута и создания аварийных ситуаций. Первый на основе текущей дорожной ситуации строит маршрут движения для каждого автомобиля. Второй имитирует аварийные ситуации с помощью флуктуаций в поведении водителя в транспортном потоке.
Данная модель является наиболее близкой по своей технической сущности заявленному изобретению, однако ее недостатками являются отсутствие возможности преднамеренного создания определенных аварийных ситуаций, а также моделирования пешеходных потоков.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей, на достижение которой направлено настоящее изобретение, является создание нового типа имитационной модели дорожного движения на основе агентно-ориентированного подхода, содержащей множество различных агентов - участников дорожного движения, позволяющую осуществлять гибкую настройку параметров взаимодействия между агентами внутри модели, тем самым позволяя максимально оптимизировать имитационную модель для обучения вождению в реальных условиях.
Техническим результатом является создание высокоточной имитационной модели дорожного движения с возможностью гибкой настройки взаимоотношений между множеством участников дорожного движения. Заявленный технический результат достигается за счет выполнения способа построения имитационной модели дорожного движения, который содержит этапы, на которых:
- загружают из базы данных информацию о дорожной сети;
- генерируют множество автономных агентов дорожной сети, причем каждый упомянутый агент содержит физическую и логическую модели;
- с помощью упомянутых агентов моделируют участников дорожного движения;
- определяют уникальные идентификаторы событий пересчета состояния агентов для каждого участника дорожного движения;
- обрабатывают упомянутые идентификаторы с помощью дискретно-событийного моделирования (ДСМ);
- генерируют среду функционирования агентов;
и
- визуализируют полученную среду функционирования агентов.
В частном варианте осуществления заявленного изобретения агенты имитационной модели представляют собой: легковые автомобили, грузовые автомобили, общественный транспорт, технику дорожных служб, пешеходов, животных, мотоциклистов, тихоходный транспорт, велосипедистов, подвижные составы метрополитена или их сочетания.
В частном варианте осуществления заявленного изобретения физическая модель агентов содержит информацию о геометрической форме участника дорожного движения, информацию о его положении в пространстве, скорости и параметрах ускорения.
В частном варианте осуществления заявленного изобретения логическая модель агента содержит правила поведения участников дорожного движения, которые включают в себя методы навигации, методы маневрирования, методы управления динамикой физической модели, методы исполнения сценария.
В частном варианте осуществления заявленного изобретения физическая и логическая модели пересчитывают свое состояние через заданный промежуток времени.
В частном варианте осуществления заявленного изобретения пересчет состояния осуществляется при помощи идентификаторов событий пересчета состояния агентов.
В частном варианте осуществления заявленного изобретения, по меньшей мере, один агент является неавтономным и ему присваивается идентификатор выполнения сценария, создающего экстремальную ситуацию в имитационной модели.
В частном варианте осуществления заявленного изобретения сценарий загружается из базы данных.
В частном варианте осуществления заявленного изобретения один и более агентов, выполняющих сценарий, создающий экстремальную ситуацию в виртуальной модели, не участвуют в общем движения с другими агентами до момента завершения сценария.
В частном варианте осуществления заявленного изобретения после выполнения упомянутого сценария, по меньшей мере, один агент продолжает участие в общем движении с остальными агентами имитационной модели. В частном варианте осуществления заявленного изобретения осуществляется генерация данных о положении, скорости, ускорении, направлении движения и об угловой скорости всех участников дорожного движения. Заявленный технический результат также достигается при реализации заявленного изобретения как устройства, системы и машиночитаемого носителя.
Частные варианты осуществления заявленного изобретения будут детально раскрыты ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
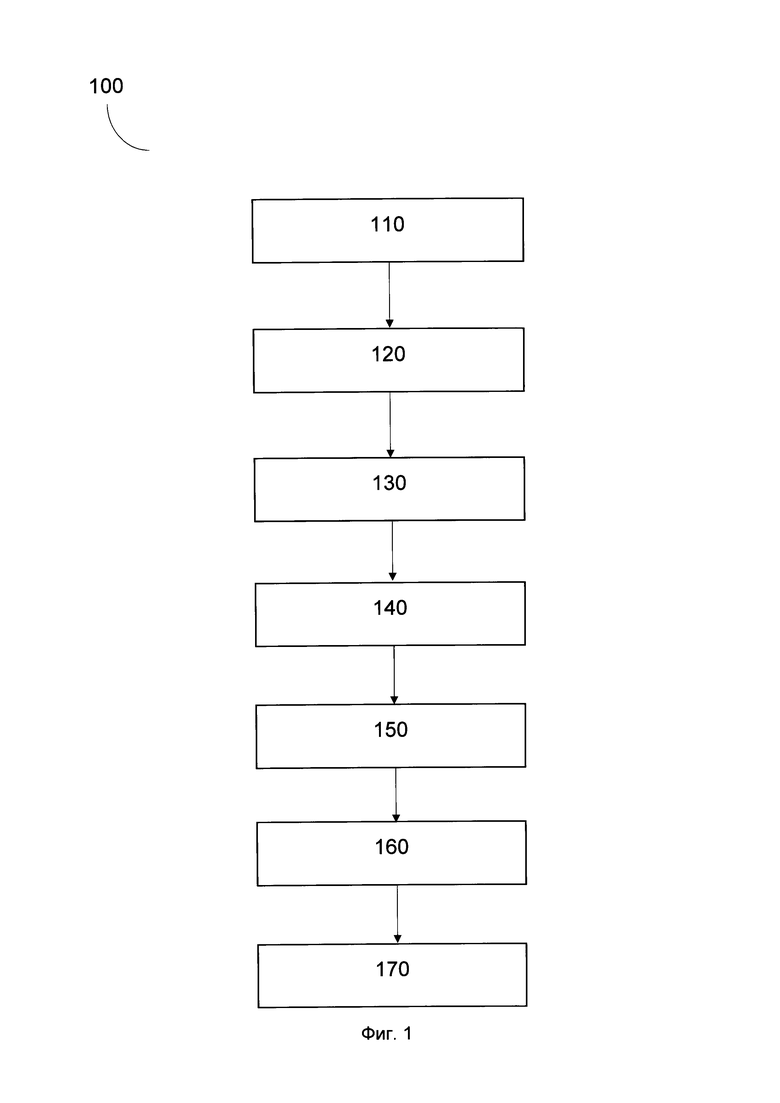
На Фиг. 1 изображена последовательность этапов способа построения имитационной модели дорожного движения.
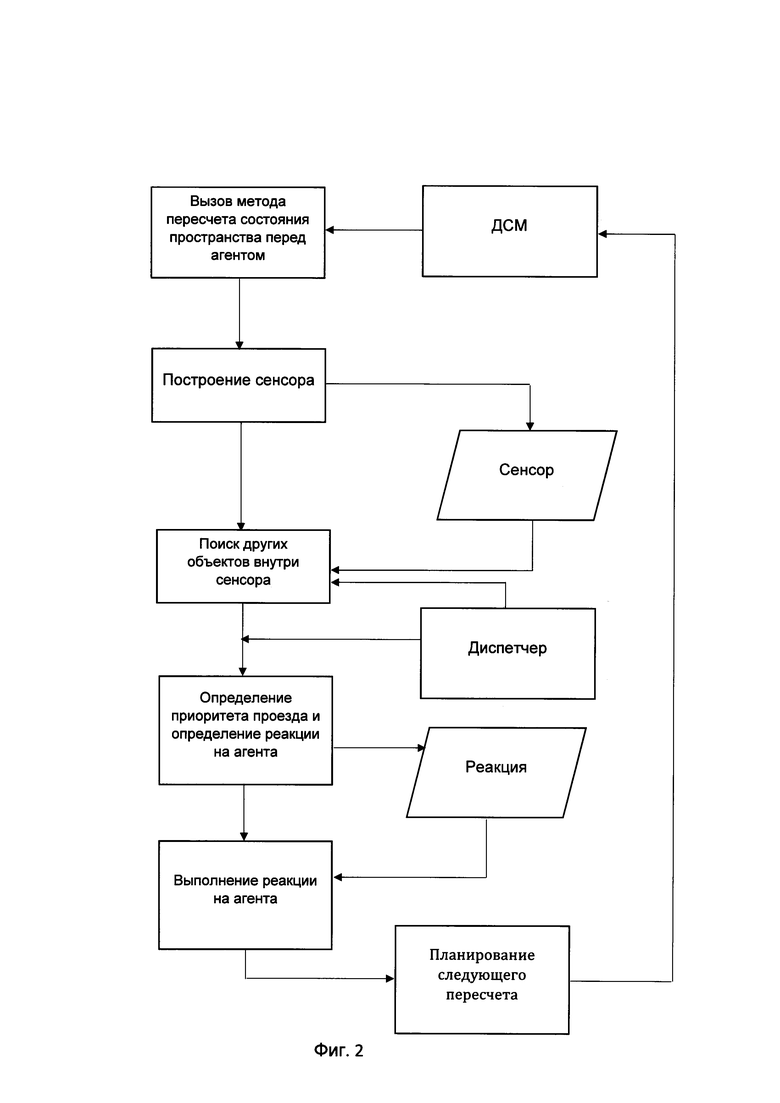
На Фиг. 2 - алгоритм работы компонента маневрирования логической модели участника дорожного движения.
На Фиг. 3-6 представлено графическое отображение имитационной модели.
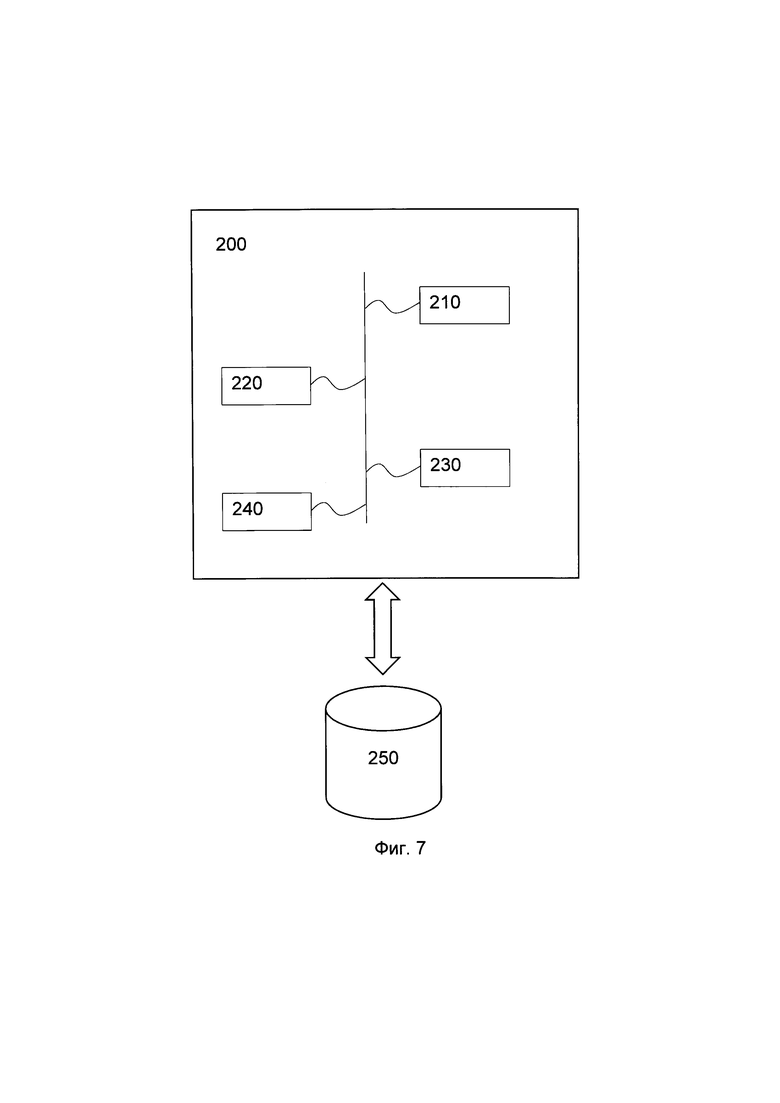
На Фиг. 7 изображен пример реализации устройства для построения имитационной модели дорожного движения.
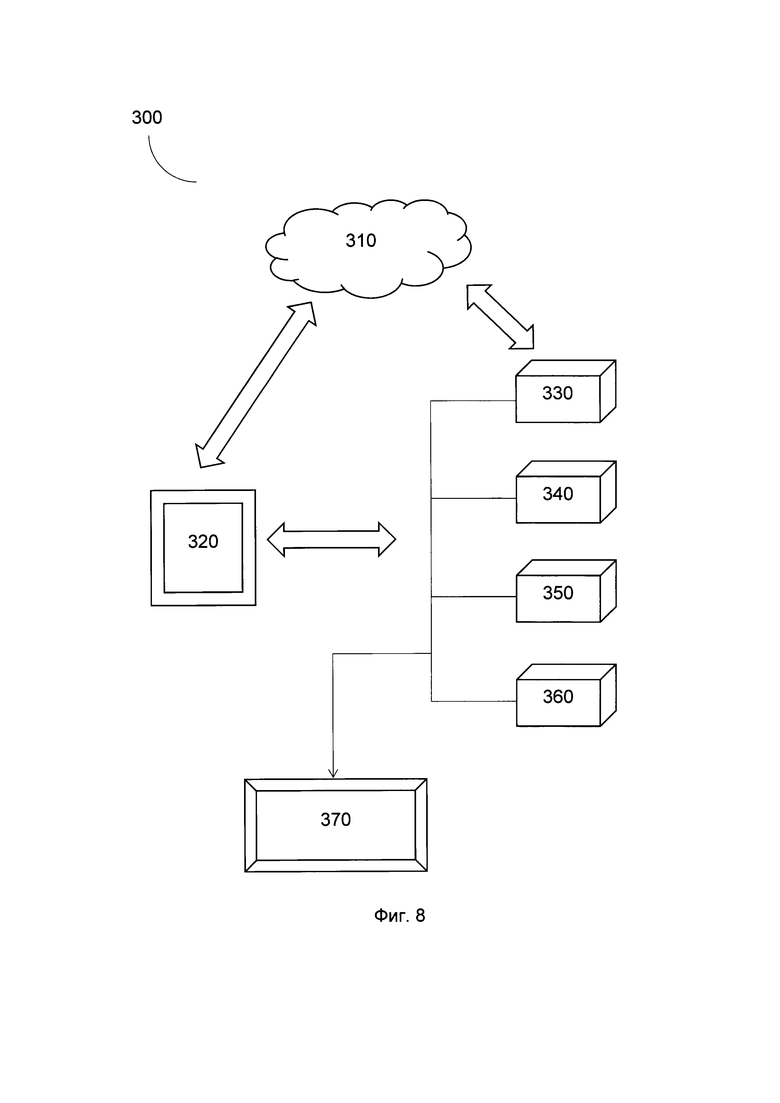
На Фиг. 8 изображен пример реализации системы для построения имитационной модели дорожного движения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 изображен способ (100), реализуемый при построении имитационной модели дорожного движения.
Работа способа построения имитационной модели дорожного движения (100) начинается с загрузки информации о дорожной сети из базы данных на этапе (110). Для моделирования дорожной сети используются два графа, имеющие пересекающиеся множества узлов, а именно топографический граф и логический граф.
Топографический граф - это граф, чьи узлы представляют из себя точки в трехмерном пространстве, а ребра содержат информацию о наличии дороги, ее ширине и геометрической форме (прямая или дуга с заданным радиусом). Логический граф в качестве собственных узлов использует те узлы топографического графа, где происходит пересечение нескольких направлений для движения (больше одного входящего ребра, либо больше одного исходящего ребра), либо только одно входящие/исходящие ребро. Содержит в себе информацию о типах участников дорожного движения, которые могут передвигаться по соответствующим ребрам топографического графа (машина, пешеход, поезд). Узлы логического графа содержат информацию о возможности перехода между логическими дугами и типом такого перехода (прямо, направо, налево, разворот).
Дорожная сеть также содержит встраиваемые объекты, имеющие собственные дорожные сети, например линии метрополитена, поездов, переезды, трамвайные линии и т.п. Данные объекты необходимы для возможности моделирования объектов, по которым происходит перемещение участников дорожного движения (остановки общественного транспорта, парковки, железнодорожные станции), в модели дорожной сети используются объекты, содержащие в себе фрагменты дорожной сети, что упрощает разработку моделей таких дорожных сетей, как маршруты движения автобусов или ветки метрополитена.
База данных, предпочтительно, является реляционной СУБД Microsoft SQL Server для хранения дорожной сети. Все элементы дорожной сети, такие как узлы и ребра дорожного графа, информация об объектах дорожного движения, станции метрополитена, хранятся в соответствующих таблицах, а связи между этими элементами протягиваются как связи между таблицами. Также в отдельных таблицах хранятся сценарии экстремальных ситуаций.
На этапе (120) осуществляется генерирование множества агентов имитационной модели - участников дорожного движения. Для достижения реализма поведения имитационной модели участника дорожного движения используется агентно-ориентированный подход. Модель дорожного движения реализована как многоагентная система. На этапе (130) каждый участник дорожного движения моделируется автономным агентом без функции долгосрочного планирования своих действий, содержащим физическую модель и логическую модель, взаимодействующую с фиксированным набором правил поведения.
Агенты в имитационной модели представляют собой: легковые автомобили, грузовые автомобили, общественный транспорт, технику дорожных служб, пешеходов, животных, мотоциклистов, тихоходный транспорт, велосипедистов, подвижные составы метрополитена или их сочетания.
Физическая модель агента содержит информацию о границах объекта представленных в виде некоторого геометрического примитива (фигуры, описывающей форму участника дорожного движения), а также набор данных о положении и ориентации агента в пространстве, его скорости и ускорении.
Через каждый фиксированный промежуток времени физическая модель пересчитывает собственное состояние. Логическая модель агента содержит тематические компоненты, содержащие наборы правил поведения, и содержит семантическую информацию о дорожной обстановке. Правила поведения разбиты по наборам тематических методов: методы навигации, методы маневрирования, методы управления динамикой физической модели, методы исполнения сценария. Логическая модель пересчитывает состояние собственных компонентов через промежуток времени, величина которого зависит от текущей скорости агента. Пересчет модели своих состояний осуществляется с помощью идентификаторов событий пересчета состояния агентов.
Методы навигации задают параметры правил определения желаемой ориентации и желаемой позиции в пространстве по логической карте. Методы маневрирования задают параметры правил взаимодействия агентов друг с другом в соответствии с правилами дорожного движения (ПДД) и позволяют реализовать такие маневры, как, например, перестроение, обгон. Методы управления динамикой физической модели позволяют определить необходимое ускорение и угол поворота колес для достижения желаемой позиции в пространстве и ориентации. Методы исполнения сценария позволяют использовать агентов для воссоздания экстремальных (аварийных) ситуаций.
На этапе (140) определяются уникальные идентификаторы каждого модуля модели и всех компонентов агентов (адресаты вызова). Также определяются уникальные идентификаторы всех их состояний, нуждающихся в пересчете. События, генерируемые на этапе (150), содержат указанные идентификаторы и время вызова события. Данные события на этом же этапе помещаются в ДСМ для их обработки. При достижении времени вызова события ДСМ находит необходимого адресата по его идентификатору и инициирует исполнение функции пересчета нужного состояния у адресата по идентификатору состояния, затем происходит исключение данного события из ДСМ. Пересчет выполняется относительно параметров адресата. Если необходимо какое-либо состояние какого-либо адресата обрабатывать периодически (например, пересчет положения, скорости), то по завершении обработки этого состояния и удаления события в ДСМ создается новое событие, включающее в себя идентификатор адресата, идентификатор события и новое время вызова.
Далее на этапе (160) происходит передача данных об агентах в среду функционирования агентов. Среда функционирования агентов представляется собой промежуточное звено между моделью имитации дорожного движения и внешними по отношению к ней модулями.
На этапе (170) осуществляется визуализация среды функционирования агентов, содержащей множество агентов в виртуальном пространстве. Визуализация может осуществляться на всех вычислительных системах, осуществляющих вывод визуализации виртуального пространства на мониторы, или проекторы, или любой иной пригодный тип устройства для представления данных.
На Фиг. 2 представлен алгоритм работы компонента маневрирования логической модели участника дорожного движения.
Данные об агентах обрабатываются ДСМ, который инициирует пересчет параметров состояния агентов, в частности, каждый агент анализирует свое состояние по отношению к другим агентам, находящимся в зоне его действия. Для этого каждый агент выполнен с функцией построения сенсора - области расчета параметров других агентов, попавших в упомянутую область, или тех, чьи сенсоры попали в упомянутую область. Поиск агентов внутри сенсора происходит с помощью модуля - диспетчера. С помощью данных от диспетчера агенты распределяют приоритеты проезда, таких объектов, как перекрестки, переезды, светофоры, пешеходные переходы и т.д. Агенты пересчитывают свое состояние и на основании полученных данных в зависимости от дорожной обстановки выполняют то или иное действие, не противоречащее ПДД. После выполнения реакции на одного или более агентов, попавших в сенсор, агент пересчитывает свое состояние и направляет соответствующие идентификаторы в ДСК для планирования дальнейшего пересчета.
Каждый агент множество раз за определенный промежуток времени пересчитывает свое положение в дорожной сети и проводит оценку необходимости взаимодействия с другими участниками дорожного движения. За это отвечают разные компоненты модели участника дорожного движения: компонент "навигация" и компонент "маневрирование", входящие в состав логического модуля модели участника дорожного движения. Во время инициализации агента в ДСМ этими компонентами помещаются идентификаторы методов пересчета необходимых параметров с обозначенным временем вызова. Во время вызова этих методов, при необходимости, происходит повторное помещение идентификаторов методов в ДСКМ с новым временем вызова (время вызова порядка 0.01 сек зависит от скорости перемещения агента). Осуществляется генерация данных о положении, скорости, ускорении, направлении движения и об угловой скорости всех участников дорожного движения.
На Фиг. 3-6 представлены примеры отображения заявленной имитационной модели. Для моделирования оживленного дорожного движения вокруг специальных точек генерируются агенты, имитирующие, например, легковые автомобили и пешеходы. Для обеспечения реализма симуляции создание машин происходит за заданным горизонтом видимости с этих точек и зависит от типа местности и типа точки видимости. Для обеспечения быстродействия системы машины, выехавшие из зоны видимости, удаляются. В качестве точек генерации могут использоваться различные объекты, в зависимости от применения модели, например, в тренажерах вождения - это модель транспортного средства, управляемая реальным экипажем. Для воссоздания аварийных ситуаций для обучения людей используются сценарии реальных экстремальных ситуаций. Агенты, воссоздающие аварийную ситуацию, не участвуют в общем дорожном движении во время выполнения сценария, а только после его выполнения (опционально через заданный промежуток времени) начинают следовать ПДД. Данные агенты не являются автономными, для выполнения заданных сценариев агентам присваивается соответствующий идентификатор, который позволяет для данных агентов загрузить из базы требуемый сценарий, до момента завершения которого упомянутые агенты не будут участвовать в общем движении наряду с автономными агентами. Причем дальнейшее участие в общем движении может продолжить как минимум один агент, создавший экстремальную ситуацию, или группа агентов. Данные сценарии настраиваются пользователем. Все агенты внутри имитационной модели двигаются по дорожной сети в соответствии с ПДД, по которым составлялись методы навигации и методы маневрирования. Также с учетом ПДД работает модуль - диспетчер. Агенты, формирующие трафик, взаимодействуют с управляющими элементами дорожного потока, таким как светофоры, дорожные знаки, регулировщики дорожного движения и т.д. Пользователь модели - инструктор или пользователь, может регулировать плотность потока в зависимости от воссоздания желаемой ситуации. Агент, который управляется не логикой модели, например, агент - пользователь, также будет считываться сенсором каждого агента в среде функционирования агентов для получения информации относительно необходимости выполнения того или иного действия. При этом возможно настраивание интенсивности как для каждого типа участников дорожного движения по отдельности, так и указание доли от максимального количества участников дорожного движения для трафика в целом.
Если при взаимодействии агентов возникают конфликтные ситуации, то идентификаторы таких агентов передаются в диспетчер, который устраняет конфликты между агентами. Также обращение к диспетчеру происходит при определении двумя агентами приоритета проезда перекрестка. Модуль - диспетчер содержит в себе правила определения приоритетов проезда, правила разрешения конфликтных ситуаций, а также все агенты регистрируют в нем свое положение, что необходимо для быстродействия поиска агентов внутри сенсоров другими агентами.
Заявленное изобретение реализуется также с помощью устройства для построения имитационной модели дорожного движения, изображенной на Фиг. 7, и машиночитаемого носителя. Устройство (200) содержит один или более процессоров (210), соединенных через шину данных (Serial Bus) с одним или более средством памяти (220), устройствами ввода/вывода (I/O) (230) и интерфейсами I/O (240). В памяти (230) устройства (200) содержаться инструкции, которые при их выполнении одним или более процессорами (210) реализуют способ построения имитационной модели дорожного движения, указанный выше. Устройство (200) может представлять собой стационарный компьютер, мейнфрейм, сервер или серверный кластер, ноутбук и любой иной пригодный тип устройства, позволяющий реализовать выполнение способа построения имитационной модели согласно упомянутым инструкциям. Средство памяти представляет собой постоянное запоминающее устройство (ПЗУ), или оперативное запоминающее устройство (ОЗУ), или жесткий диск (HDD), или внешний машиночитаемый носитель данных, или их сочетания. Внешний машиночитаемый носитель данных выбирается из группы: USB-флеш накопитель, карта памяти, оптический диск, мини-диск, внешний HDD диск или иной пригодный тип носителя, с возможностью его использования в устройстве (200). База данных (250), содержащая необходимые данные для построения имитационной модели дорожного движения, может представлять собой как внешнее хранилище данных, соединенное посредством проводной или беспроводной сети передачи данных с устройством (200), например интернет, интранет, LAN, WAN, WLAN и т.п., а также содержаться непосредственно в самом устройстве (200) (данный вариант не показан на Фиг. 7).
Интерфейсы I/O (240) представляют собой, но не ограничиваясь, например, последовательные порты, параллельные порты, универсальную последовательную шину (USB), IEEE-1394 (i. Link или Fire Ware), LAN или любой иной тип интерфейса, использующего при конкретном частном варианте реализации устройства (200).
Машиночитаемый носитель данных представляет собой средство памяти, содержащее машиночитаемые инструкции. Которые при их выполнении побуждают один или более процессоров выполнять этапы способа построения имитационной модели дорожного движения. Машиночитаемый носитель может представлять собой любое из вышеуказанных средств памяти или носителей, пригодных для хранения машиночитаемых инструкций для их исполнения процессором.
На Фиг. 8 изображен примерный вид системы для построения имитационной модели (300). Система (300) представляет собой окружение из соединенных посредством сети передачи данных (310) устройств. Устройство (320), представляющее собой основное вычислительное устройство - обработчик, в частности сервер, реализует шаги способа, раскрытого в настоящих материалах выше. Устройства (330)-(360) являются устройствами пользователей или рабочими местами, например стационарными компьютерами или ноутбуками, соединенными через сеть передачи данных (310) или напрямую с сервером (320). Устройства (330)-(360) могут быть объединены в сеть между собой. В частном варианте исполнения группы устройств могут организовывать кластеры, которые по отдельности могут соединяться с серверным устройством (320), это используется как вариант для генерирования сценария исполнения экстремальных ситуаций или имитирования кортежа, сопровождения и т.п. Устройство (370) представляет собой средство для отображения данных, например дисплей, монитор, проектор, которое сопряжено с помощью соответствующих средств с каждым из упомянутых рабочих мест пользователей.
Приведенные в настоящих материала примеры реализации заявленного изобретения были успешно реализованы в следующих системах:
- комплекс тренажеров ЛиАЗ-5256/6212, установленный в ГУП "Мосгортранс";
- тренажеры ВАЗ-2110 (РОСТО (ДОСААФ));
- тренажеры Урал-4320, (минская военная академия Республики Беларусь);
- тренажеры КАМАЗ-4350/5350 (РОСТО (ДОСААФ));
- комплекс тренажеров ВАЗ-2110 (Федеральной службы охраны РФ).
Изложенные в настоящих материалах заявки сведения об осуществлении заявленного изобретения не должны трактоваться как сведения, ограничивающие иные, частные варианты осуществления заявленного изобретения, не выходящие за пределы раскрытия информации заявки, и которые должны являться очевидными для специалистов в данной области техники, имеющих обычную квалификацию, на которых рассчитано заявленное техническое решение.
Источники информации
1. Angshuman G., Introduction to TRANSIMS.
(URL: https://t-square.gatech.edu/access/content/group/28974.201002/Introduction_to_TRANSIMS_Part1.pdf)
2. Barcelo J. Microscopic traffic simulation: a tool for the design, analysis and evaluation of intelligent transport systems // Journal of intelligent and robotic systems. - 2005. - Vol. 41, №2-3. - P. 173-203.
3. Lownes N.E. VISSIM: a multi-parameter sensitivity analysis / N.E. Lownes, R.B. Machemehl // Proceedings of the 38th conference on Winter simulation. - 2006. - P. 1406-1413.
4. Cameron G. PARAMICS - moving vehicles on the connection machine / G. Cameron, B. Wyline, D. McArthur // Proceedings of the conference on supercomputing. - IEEE computer society press, 1994. - P. 291-300.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ВИРТУАЛЬНЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПОДГОТОВКИ ОБУЧАЮЩИХСЯ В ОБЛАСТИ ОБЕСПЕЧЕНИЯ ПОЖАРНОЙ БЕЗОПАСНОСТИ И ЗАЩИТЫ НАСЕЛЕНИЯ И ТЕРРИТОРИЙ ОТ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2023 |
|
RU2816401C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2024 |
|
RU2839125C1 |
| ТРЕНАЖЕР ОПЕРАТИВНОГО И ЭКСПЛУАТАЦИОННОГО ПЕРСОНАЛА НА ОСНОВЕ МОДЕЛЕЙ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ ТРАНСФОРМАТОРНОЙ ПОДСТАНЦИИ | 2016 |
|
RU2617972C1 |
| ИНТЕРАКТИВНЫЙ ТРЕНАЖЕР ДЛЯ ОСУЩЕСТВЛЕНИЯ ТРЕНИРОВОК С ПОМОЩЬЮ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2020 |
|
RU2761325C1 |
| ТРЕНАЖЕР ОБУЧЕНИЯ НАРАЩИВАНИЮ РЕСНИЦ | 2012 |
|
RU2493608C1 |
| СИСТЕМА ПРИНЯТИЯ РЕШЕНИЙ В МУЛЬТИАГЕНТНОЙ СРЕДЕ | 2021 |
|
RU2791840C2 |
| Комплекс оповещения участников дорожного движения для предотвращения их столкновений | 2024 |
|
RU2836064C1 |
| Комплекс технических средств обучения для подготовки общевойсковых соединений в центре боевой подготовки | 2016 |
|
RU2610725C9 |
| СПОСОБ ОЦЕНКИ КОНКУРЕНТОСПОСОБНОСТИ ГИДРОАКУСТИЧЕСКОЙ РЫБОПОИСКОВОЙ АППАРАТУРЫ И ИНФОРМАЦИОННО-АНАЛИТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2139554C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ КООПЕРАТИВНОЙ ОСВЕДОМЛЕННОСТИ В ИНТЕЛЛЕКТУАЛЬНЫХ ТРАНСПОРТНЫХ СИСТЕМАХ | 2017 |
|
RU2752430C2 |

Изобретение относится к созданию имитационной модели движения транспортных и пешеходных потоков, использующейся в тренажерах для обучения вождению. Техническим результатом является создание высокоточной имитационной модели дорожного движения с возможностью гибкой настройки взаимоотношений между множеством участников дорожного движения. В способе построения имитационной модели дорожного движения загружают из базы данных информацию о дорожной сети. Генерируют множество автономных агентов дорожной сети, причем каждый упомянутый агент содержит физическую и логическую модели, и моделируют участников дорожного движения с помощью полученных агентов. Определяют уникальные идентификаторы событий пересчета состояния агентов для каждого участника дорожного движения. Обрабатывают идентификаторы с помощью дискретно-событийного моделирования (ДСМ). Генерируют и визуализируют среду функционирования агентов. 4 н. и 12 з.п. ф-лы, 8 ил.
1. Способ построения имитационной модели дорожного движения, содержащий этапы, на которых:
- загружают из базы данных информацию о дорожной сети;
- генерируют множество автономных агентов дорожной сети, причем каждый упомянутый агент содержит физическую и логическую модели;
- с помощью упомянутых агентов моделируют участников дорожного движения;
- определяют уникальные идентификаторы событий пересчета состояния агентов для каждого участника дорожного движения;
- обрабатывают упомянутые идентификаторы с помощью дискретно-событийного моделирования (ДСМ);
- генерируют среду функционирования агентов;
и
- визуализируют полученную среду функционирования агентов.
2. Способ по п. 1, отличающийся тем, что агенты в имитационной модели представляют собой: легковые автомобили, грузовые автомобили, общественный транспорт, технику дорожных служб, пешеходов, животных, мотоциклистов, тихоходный транспорт, велосипедистов, подвижные составы метрополитена или их сочетания.
3. Способ по п. 1, отличающийся тем, что физическая модель агентов содержит информацию о геометрической форме участника дорожного движения, информацию о его положении в пространстве, скорости и параметрах ускорения.
4. Способ по п. 1, отличающийся тем, что логическая модель агента содержит правила поведения участников дорожного движения, которые включают в себя методы навигации, методы маневрирования, методы управления динамикой физической модели, методы исполнения сценария.
5. Способ по п. 1, отличающийся тем, что физическая и логическая модели пересчитывают свое состояние через заданный промежуток времени.
6. Способ по п. 5, отличающийся тем, что пересчет состояния осуществляется при помощи идентификаторов событий пересчета состояния агентов.
7. Способ по п. 1, отличающийся тем, что, по меньшей мере, один агент является неавтономным и ему присваивается идентификатор выполнения сценария, создающего экстремальную ситуацию в имитационной модели.
8. Способ по п. 7, отличающийся тем, что упомянутый сценарий загружается из базы данных.
9. Способ по п. 7, отличающийся тем, что один и более агентов, выполняющих сценарий, создающий экстремальную ситуацию в имитационной модели, не участвуют в общем движения с другими агентами до момента завершения сценария.
10. Способ по п. 7, отличающийся тем, что после выполнения упомянутого сценария, по меньшей мере, один агент продолжает участие в общем движении с остальными агентами имитационной модели.
11. Способ по п. 1, отличающийся тем, что осуществляется генерация данных о положении, скорости, ускорении, направлении движения и об угловой скорости всех участников дорожного движения.
12. Устройство для построения имитационной модели дорожного движения, содержащее один или более процессоров, устройства и интерфейсы ввода/вывода и, по меньшей мере, одно средство памяти, причем память содержит исполняемые, по меньшей мере, одним процессором инструкции, которые при их исполнении выполняют способ по любому из пп. 1-11.
13. Устройство по п. 12, отличающееся тем, что средство памяти представляет собой постоянное запоминающее устройство (ПЗУ), или оперативное запоминающее устройство (ОЗУ), или жесткий диск (HDD), или внешний машиночитаемый носитель данных, или их сочетания.
14. Устройство по п. 13, отличающееся тем, что внешний машиночитаемый носитель данных выбирается из группы: USB-флеш накопитель, карта памяти, оптический диск, мини-диск, внешний HDD диск.
15. Система построения имитационной модели дорожного движения, содержащая сервер, базу данных и одно или более автоматизированных рабочих мест, причем сервер содержит один или более процессоров, и, по меньшей мере, одно средство памяти, причем память содержит исполняемые, по меньшей мере, одним процессором инструкции, которые при их исполнении выполняют способ по любому из пп. 1-11, а каждое упомянутое рабочее место дополнительно содержит средство визуализации информации, получаемой от сервера.
16. Машиночитаемый носитель данных, содержащий исполняемые, по меньшей мере, одним процессором машиночитаемые команды, которые при их исполнении выполняют способ построения имитационной модели дорожного движения по любому из пп. 1-11.
| А.Ж | |||
| АХМЕТОВА, К.С | |||
| ЧИРКУНОВ, О.В | |||
| ЛЕСКИН "Многоагентная система управления дорожным движением", В: Научный журнал "НОВЫЙ УНИВЕРСИТЕТ", серия "Технические науки", N 4(14) 2013, ООО "Коллоквиум", 2013, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| MOHAMED HABIB KAMMOUN, ILHEM KALLEL, MOHAMED ADEL ALIMI "RoSMAS: Road Supervision based Multi-Agent System Simulation", In: International | |||

