Область техники, к которой относится изобретение
[001] Настоящая технология относится к беспилотным автомобилям в целом и к способу и системе для формирования траектории движения беспилотного автомобиля с использованием алгоритма планирования движения, в частности.
Уровень техники
[002] Полностью или в значительной степени автоматизированные системы вождения могут предназначаться для управления транспортным средством на дороге без участия водителя (например, в автономном режиме) или иного внешнего управления. Например, беспилотные и/или автономные транспортные средства рассчитаны на компьютеризированное управление.
[003] Автономное транспортное средство (например, беспилотный автомобиль (SDC, Self-Driving Car), робот-доставщик, складской робот и т.п.) способно проходить запланированный маршрут между текущим положением и целевым будущим положением без участия (или с минимальным участием) водителя. Для этого беспилотный автомобиль может быть подключен ко множеству датчиков, обеспечивающих «восприятие» им окружающего пространства. Например, беспилотный автомобиль в том или ином варианте реализации может содержать одну или несколько камер, один или несколько лидаров и один или несколько радиолокаторов. Кроме того, беспилотный автомобиль может иметь доступ к трехмерной карте для определения своего местоположения в пространстве.
[004] Одной из технических проблем, связанных с беспилотными автомобилями, является обеспечение их способности прогнозировать или иным образом определять траектории движения других участников дорожного движения (например, других транспортных средств), движущихся в окружающем пространстве беспилотного автомобиля, в частности, по соседним полосам. Если то или иное транспортное средство, движущееся, например, перед беспилотным автомобилем по соседней полосе, собирается совершить маневр (в частности, поворот влево или вправо), его траектория может совпасть и/или пересечься (по меньшей мере частично) с траекторией беспилотного автомобиля, в результате чего может возникнуть высокий риск столкновения между беспилотным автомобилем и одним из других транспортных средств (включая указанное) в окружающем пространстве. Следовательно, беспилотному автомобилю может потребоваться принятие упреждающих мер, таких как торможение или, наоборот, активное ускорение, чтобы траектория движения беспилотного автомобиля сводила к минимуму риск дорожно-транспортного происшествия.
[005] Как правило, беспилотный автомобиль способен определять траекторию своего движения с учетом объектов, расположенных в текущем окружающем пространстве беспилотного автомобиля. Для этого, например, процессор беспилотного автомобиля способен (1) получать данные измерений (например, данные лидара, датчика типа «камера» или другого датчика), содержащие информацию об окружающем пространстве беспилотного автомобиля, (2) на основе данных измерений с использованием алгоритма машинного обучения для обнаружения объектов определять местоположение и классы (например, транспортное средство, пассажир, уличный фонарь и т.п.) объектов в окружающем пространстве беспилотного автомобиля и (3) определять поведение таких объектов на основе их местоположения и классов. Далее на основе такого определения поведения внешних объектов процессор способен формировать траекторию движения беспилотного автомобиля.
[006] Процесс формирования траектории движения может реализовываться процессором беспилотного автомобиля итеративно, то есть процессор способен определять траекторию движения беспилотного автомобиля с учетом внешних объектов на каждой итерации (длительностью, например, 1, 5 или 10 мс). В связи с этим процессор беспилотного автомобиля способен выполнять алгоритм планирования движения. Например, процессор способен формировать траекторию движения на каждой итерации таким образом, чтобы беспилотный автомобиль избегал столкновения с внешними объектами.
[007] Одной из технических проблем, с которой может столкнуться беспилотный автомобиль при движении по заданной траектории, является обнаружение объектов неизвестных классов, то есть объектов, которые алгоритм машинного обучения распознавать не обучен. Другой проблемой для беспилотного автомобиля могут служить внезапно возникающие объекты, то есть объекты, для распознавания которых алгоритму обнаружения объектов требуется дополнительное время. Любая из таких ситуаций может приводить к навигационным ошибкам или к дорожно-транспортным происшествиям, связанным с беспилотным автомобилем. Например, поскольку женщины с колясками встречаются на дороге сравнительно реже других пешеходов, алгоритм машинного обучения для обнаружения объектов на беспилотном автомобиле может распознать такой объект как неодушевленный. В другом примере животное, несвойственное местности, для функционирования в которой был обучен беспилотный автомобиль (например, овца или корова в городе), может быть распознано как статический объект.
[008] Очевидно, что обучение алгоритма машинного обучения для обнаружения объектов всех классов, независимо от условий функционирования беспилотного автомобиля, например, его географического положения, может быть неэффективным из-за значительных затрат вычислительных ресурсов, времени и усилий на разметку обучающего набора данных, а также дальнейшее обучение и использование такого алгоритма машинного обучения для обнаружения объектов.
[009] В известных технических решениях был предложен ряд способов для решения вышеуказанной технической проблемы.
[010] В патенте US11551414B2 «Simulation architecture for on-vehicle testing and validation» («Архитектура системы имитационного моделирования для бортового анализа и контроля»), выданном 10 января 2023 года и принадлежащем компаниям Magna Autonomous Systems LLC и Woven by Toyota US Inc, раскрыта компьютерная система транспортного средства, которая формирует данные распознавания на основе данных, полученных одним или несколькими датчиками транспортного средства. Данные распознавания включают в себя одно или несколько представлений физических объектов в окружающем пространстве, связанном с транспортным средством. Компьютерная система также определяет имитационные данные распознавания, содержащие одно или несколько представлений виртуальных объектов в окружающем пространстве, и формирует модифицированные данные распознавания на основе данных распознавания и имитационных данных распознавания. Модифицированные данные распознавания содержат одно или несколько представлений физических объектов и/или одно или несколько представлений виртуальных объектов. На основе модифицированных данных распознавания, содержащих одно или несколько представлений виртуальных объектов, компьютерная система определяет траекторию движения транспортного средства.
[011] В патенте US11494533B2 «Simulations with modified agents for testing autonomous vehicle software» («Имитационное моделирование с использованием модифицированных агентов для тестирования программного обеспечения автономных транспортных средств»), выданном 8 ноября 2022 года и принадлежащем компании Waymo LLC, раскрыто программное обеспечение для имитационного моделирования, в котором могут использоваться данные журнала, собранные транспортным средством, функционирующим в режиме автономного вождения. Имитационное моделирование выполняется с использованием программного обеспечения, управляющего моделируемым транспортным средством, за счет изменения характеристик агента, распознанного на основе данных журнала. В процессе имитационного моделирования может быть определено, что в заданных условиях между первым моделируемым транспортным средством и модифицированным агентом происходит взаимодействие первого типа. При выявлении того, что в заданных условиях происходит взаимодействие определенного типа, модифицированный агент может быть заменен интерактивным агентом, имитирующим участника дорожного движения, соответствующего модифицированному агенту, который способен реагировать на действия, выполняемые моделируемыми транспортными средствами. Таким образом, имитационное моделирование позволяет определять конкретный тип взаимодействия между моделируемым транспортным средством и интерактивным агентом в заданных условиях.
[012] В патенте US11338825B2 «Agent behavior model for simulation control» («Модель поведения агента для управления имитационным моделированием»), выданном 24 мая 2022 года и принадлежащем компании Zoox Inc, раскрыт способ имитационного моделирования реального движения объекта, такого как транспортное средство или пешеход, в котором учитывается необычное поведение. Имитационное моделирование может предусматривать формирование модели поведения агента, по меньшей мере частично основанной на данных элемента распознавания автономного транспортного средства, и определение расхождения между этими данными и данными журнала, которые включают в себя признаки фактического перемещения объекта. Имитационное моделирование движения объекта может предусматривать прогнозирование движения объекта с использованием элемента распознавания и корректирование прогнозируемого движения на основе, по меньшей мере частично, модели поведения агента.
Раскрытие изобретения
[013] Таким образом, существует потребность в системах и способах, позволяющих исключать, уменьшать или преодолевать недостатки известных технических решений.
[014] Разработчики настоящей технологии установили, что данные измерений беспилотного автомобиля, характеризующие редкие и внезапно возникающие объекты, могут использоваться при формировании имитационной среды, которая позволяет тестировать новые версии алгоритма планирования движения, способного формировать новые траектории беспилотного автомобиля.
[015] В частности, разработчики настоящей технологии установили, что имитационная среда для моделирования движения беспилотного автомобиля может быть сформирована на основе прошлых данных измерений, характеризующих движение беспилотного автомобиля на заданном участке дороги с учетом прошлого поведения всех объектов, окружающих беспилотный автомобиль, например, женщины с коляской, направлявшейся к пешеходному переходу, пересекающему прошлую траекторию движения беспилотного автомобиля, или овцы, в панике выскочившей из фургона, припаркованного у дороги, по которой движется беспилотный автомобиль.
[016] Кроме того, моделирование движения беспилотного автомобиля по смоделированной траектории в сформированной таким способом имитационной среде может быть реализовано итеративно, как и при формировании траектории во время функционирования беспилотного автомобиля. При этом во избежание столкновений между беспилотным автомобилем и внешними объектами в имитационной среде, а также для повышения реалистичности моделирования разработчики учли, что имитационная среда может динамически обновляться путем корректировки поведения внешних объектов в зависимости от текущей смоделированной траектории беспилотного автомобиля на каждой итерации моделирования.
[017] Иными словами, некоторые не имеющие ограничительного характера варианты осуществления настоящей технологии призваны (1) моделировать на заданной итерации моделирования поведение заданного внешнего объекта, реагирующего на текущую смоделированную траекторию беспилотного автомобиля, (2) определять, отличается ли смоделированное поведение от прошлого поведения внешнего объекта в соответствующей ситуации, и если отличается, то (3) заменять в имитационной среде прошлое поведение этого внешнего объекта на смоделированное поведение на одной или нескольких последующих итерациях моделирования.
[018] Следовательно, сформированная указанным способом имитационная среда обеспечивает более реалистичное моделирование движения беспилотного автомобиля с учетом поведения различных объектов (включая неожиданные и/или редко встречающиеся) в окружающем пространстве беспилотного автомобиля, что позволяет более эффективно выбирать версии алгоритма планирования движения для последующего использования при формировании траекторий движения беспилотного автомобиля во время его функционирования.
[019] Таким образом, способы и системы, описанные в настоящем документе, способствуют повышению безопасности и комфорта беспилотного автомобиля.
[020] В частности, в соответствии с первым широким аспектом настоящей технологии представлен компьютерно-реализуемый способ определения траектории движения транспортного средства с использованием алгоритма планирования движения. Способ предусматривает получение данных о движении транспортного средства на заданном участке дороги, которые включают в себя данные о внешних объектах транспортного средства на заданном участке дороги, и формирование на основе данных о движении контрольной имитационной среды для моделирования движения транспортного средства, характеризующей контрольное поведение каждого внешнего объекта транспортного средства на заданном участке дороги на множестве итераций моделирования. Кроме того, на заданной итерации моделирования из множества итераций моделирования способ предусматривает формирование смоделированной траектории движения транспортного средства на заданной итерации моделирования в контрольной имитационной среде на основе данных о движении с использованием текущей версии алгоритма планирования движения, определение смоделированного поведения заданного внешнего объекта на основе смоделированной траектории, и если контрольное поведение заданного внешнего объекта на заданной итерации моделирования отличается от смоделированного поведения этого внешнего объекта, формирование модифицированной контрольной имитационной среды путем замены в контрольной имитационной среде контрольного поведения заданного внешнего объекта на его смоделированное поведение на одной или нескольких последующих итерациях моделирования из множества итераций моделирования, и использование экземпляра модифицированной контрольной имитационной среды с одной из множества итераций моделирования для определения траекторий движения транспортного средства с применением последующих версий алгоритма планирования движения.
[021] В некоторых вариантах реализации способа формирование контрольной имитационной среды предусматривает определение класса объектов для каждого внешнего объекта на заданном участке дороги.
[022] В некоторых вариантах реализации способа определение класса объектов для каждого внешнего объекта предусматривает запрос соответствующей метки у человека-оценщика.
[023] В некоторых вариантах реализации способа данные о движении содержат ограничивающие рамки, представляющие внешние объекты, а определение класса объектов для каждого внешнего объекта предусматривает применение алгоритма машинного обучения, обученного определению класса объектов для заданного внешнего объекта на основе представляющей его ограничивающей рамки.
[024] В некоторых вариантах реализации способа определение смоделированного поведения заданного внешнего объекта предусматривает применение алгоритма машинного обучения, обученного определению фактического поведения внешних объектов на основе текущей траектории движения транспортного средства.
[025] В некоторых вариантах реализации способа замена предусматривает замену до тех пор, пока на последующей итерации моделирования из множества итераций моделирования смоделированное поведение заданного окружающего объекта не окажется соответствующим его контрольному поведению на заданной итерации моделирования.
[026] В некоторых вариантах реализации способа при наступлении события останова на заданной итерации моделирования он дополнительно предусматривает прерывание моделирования движения транспортного средства без перехода к последующей итерации моделирования и исключение текущей версии алгоритма планирования движения из дальнейшего рассмотрения при определении траекторий движения транспортного средства.
[027] В некоторых вариантах реализации способа событие останова включает в себя возникновение на заданной итерации моделирования дорожно-транспортного происшествия, связанного с транспортным средством.
[028] В соответствии со вторым широким аспектом настоящей технологии реализован сервер для определения траектории движения транспортного средства с использованием алгоритма планирования движения. Сервер содержит по меньшей мере один процессор и по меньшей мере одну физическую машиночитаемую память, хранящую исполняемые команды, при исполнении которых по меньшей мере одним процессором, сервер обеспечивает получение данных о движении транспортного средства на заданном участке дороги, включая данные о внешних объектах транспортного средства на заданном участке дороги, формирование на основе данных о движении контрольной имитационной среды для моделирования движения транспортного средства, характеризующей контрольное поведение каждого внешнего объекта транспортного средства на заданном участке дороги на множестве итераций моделирования, а также, на заданной итерации моделирования из множества итераций моделирования, формирование смоделированной траектории движения транспортного средства в контрольной имитационной среде на заданной итерации моделирования на основе данных о движении с использованием текущей версии алгоритма планирования движения, определение смоделированного поведения заданного внешнего объекта на основе смоделированной траектории, и если контрольное поведение заданного внешнего объекта на заданной итерации моделирования отличается от смоделированного поведения этого внешнего объекта, формирование модифицированной контрольной имитационной среды путем замены в контрольной имитационной среде на одной или нескольких последующих итерациях моделирования из множества итераций моделирования контрольного поведения заданного внешнего объекта на его смоделированное поведение и использование экземпляра модифицированной контрольной имитационной среды с одной из множества итераций моделирования для определения траекторий движения транспортного средства с применением последующих версий алгоритма планирования движения.
[029] В некоторых вариантах реализации сервера при формировании контрольной имитационной среды по меньшей мере один процессор обеспечивает определение сервером класса объектов для каждого внешнего объекта на заданном участке дороги.
[030] В некоторых вариантах реализации сервера для определения класса объектов для каждого внешнего объекта, по меньшей мере один процессор обеспечивает запрос сервером соответствующей метки у человека-оценщика.
[031] В некоторых вариантах реализации сервера данные о движении содержат ограничивающие рамки, представляющие внешние объекты, а для определения класса объектов для каждого внешнего объекта по меньшей мере один процессор обеспечивает применение сервером алгоритма машинного обучения, обученного определению класса объектов для заданного внешнего объекта на основе представляющей его ограничивающей рамки.
[032] В некоторых вариантах реализации сервера для определения смоделированного поведения заданного внешнего объекта по меньшей мере один процессор обеспечивает применение сервером алгоритма машинного обучения, обученного определению фактического поведения внешних объектов на основе текущей траектории движения транспортного средства.
[033] В некоторых вариантах реализации сервера замена предусматривает замену до тех пор, пока на последующей итерации моделирования из множества итераций моделирования смоделированное поведение заданного окружающего объекта не окажется соответствующим его контрольному поведению на заданной итерации моделирования.
[034] В некоторых вариантах реализации сервера при наступлении события останова на заданной итерации моделирования по меньшей мере один процессор дополнительно обеспечивает прерывание сервером моделирования движения транспортного средства без перехода к последующей итерации моделирования и исключение сервером текущей версии алгоритма планирования движения из дальнейшего рассмотрения при определении траекторий движения транспортного средства.
[035] В некоторых вариантах реализации сервера событие останова включает в себя возникновение на заданной итерации моделирования дорожно-транспортного происшествия, связанного с транспортным средством.
[036] В контексте данного описания термин «источник света» в широком смысле относится к любому устройству, способному испускать излучение, в частности, излучать сигнал в виде луча, например, среди прочего, светового луча с одной или несколькими длинами волн в спектре электромагнитного излучения. В одном примере осуществления источником света может быть лазерный источник. Таким образом, источник света может содержать лазер, например, твердотельный лазер, лазерный диод, лазер высокой мощности, или альтернативный источник света, например, источник света на основе светоизлучающих диодов. Некоторыми (не имеющими ограничительного характера) примерами лазерного источника являются лазерный диод Фабри-Перо, лазер на квантовых ямах, лазер с распределенным брэгговским отражателем (DBR, Distributed Bragg Reflector), лазер с распределенной обратной связью (DFB, Distributed FeedBack), волоконный лазер или поверхностно-излучающий лазер с вертикальным резонатором (VCSEL, Vertical-Cavity Surface-Emitting Laser). Кроме того, лазерный источник может излучать световые лучи в различных форматах, например, в виде световых импульсов, непрерывных колебаний, квазинепрерывных колебаний и т.д. В некоторых не имеющих ограничительного характера примерах лазерный источник может содержать лазерный диод, способный излучать свет с длиной волны в диапазоне приблизительно 650-1150 нм. В альтернативном варианте источник света может содержать лазерный диод, способный излучать световые лучи с длиной волны в диапазоне приблизительно 800-1000 нм, приблизительно 850-950 нм, приблизительно 1300-1600 нм или в любом другом подходящем диапазоне. Если не указано иное, термин «приблизительно» применительно к числовому значению определяется как отклонение, не превышающее 10% указанного значения.
[037] В контексте настоящего описания термин «окружающее пространство» транспортного средства относится к области или объему вокруг этого транспортного средства, включая часть его текущей окружающей среды, доступную для сканирования с использованием одного или нескольких датчиков, установленных на этом транспортном средстве, например, для формирования трехмерной карты окружающего пространства или для обнаружения в нем объектов.
[038] В контексте настоящего описания «сервер» представляет собой выполняемую на соответствующих аппаратных средствах компьютерную программу, способную принимать по сети запросы (например, от электронных устройств), а также выполнять эти запросы или инициировать их выполнение. Такие аппаратные средства могут быть реализованы в виде одного физического компьютера или одной физической компьютерной системы, что не имеет существенного значения для настоящей технологии. В данном контексте при употреблении выражения «сервер» не подразумевается, что какая-либо конкретная задача или все задачи (например, принятые команды или запросы) принимаются, выполняются или запускаются на одном и том же сервере (т.е. одними и теми же программными и/или аппаратными средствами), а имеется в виду, что участвовать в приеме, передаче, выполнении или инициировании выполнения каких-либо задач или запросов либо результатов каких-либо задач или запросов может любое количество программных или аппаратных средств, и что все эти программные и аппаратные средства могут представлять собой один сервер или несколько серверов, при этом выражение «по меньшей мере один сервер» охватывает оба этих случая.
[039] В контексте настоящего описания «электронное устройство» представляет собой любые компьютерные аппаратные средства, способные обеспечивать работу программного обеспечения, подходящего для выполнения поставленной задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств, впрочем, это не носит обязательного характера для настоящей технологии. Таким образом, не имеющими ограничительного характера примерами электронных устройств являются блок автономного вождения, персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, например, маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте факт функционирования оборудования в качестве электронного устройства не означает, что оно не может функционировать в качестве сервера для других электронных устройств.
[040] В контексте данного описания выражение «информация» включает в себя информацию любого рода или вида, допускающую хранение в базе данных. Таким образом, информация включает в себя, среди прочего, визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), данные (например, данные о местоположении, данные о погоде, данные о трафике, числовые данные и т.д.), текст (например, отзывы, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[041] В контексте данного описания термин «база данных» означает любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных и компьютерных аппаратных средств для хранения таких данных, их применения или обеспечения их использования иным способом. База данных может размещаться в тех же аппаратных средствах, в которых реализован процесс, обеспечивающий хранение или использование информации, хранящейся в базе данных, либо в отдельных аппаратных средствах, таких как специализированный сервер или группа серверов.
[042] В контексте настоящего описания числительные «первый», «второй», «третий» и т.д. служат лишь для указания на различия между существительными, к которым они относятся, а не для описания каких-либо определенных взаимосвязей между этими существительными. Кроме того, как встречается в настоящем описании в другом контексте, ссылки на «первый» элемент и «второй» элемент не исключают того, что эти два элемента в действительности могут быть одним и тем же элементом.
[043] Каждый вариант осуществления настоящей технологии относится по меньшей мере к одной из вышеупомянутых целей и/или к одному из вышеупомянутых аспектов, но не обязательно ко всем ним. Следует понимать, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, не упомянутым здесь явным образом.
[044] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, на приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[045] Эти и другие признаки, аспекты и преимущества настоящей технологии содержатся в дальнейшем описании, в приложенной формуле изобретения и на следующих чертежах.
[046] На фиг. 1 схематически представлен пример компьютерной системы, пригодной для реализации некоторых вариантов осуществления систем и/или способов в соответствии с настоящей технологией.
[047] На фиг. 2 представлена сетевая компьютерная среда, пригодная для использования с некоторыми вариантами осуществления настоящей технологии.
[048] На фиг. 3 схематически представлена процедура сбора лидарных данных, выполняемая процессором электронного устройства в сетевой компьютерной среде, показанной на фиг. 2, и обеспечивающая получение данных трехмерного облака точек, собранных лидарным датчиком на транспортном средстве, которое входит в состав сетевой компьютерной среды, показанной на фиг. 2, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[049] На фиг. 4 схематически представлено транспортное средство, входящее в состав сетевой компьютерной среды, показанной на фиг. 2, и движущееся в пределах заданного участка дороги, представленного данными трехмерного облака точек, которые были получены процессором, выполняющим процедуру сбора данных, представленную на фиг. 3, в сетевой компьютерной среде, показанной на фиг. 2, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[050] На фиг. 5 схематически представлена контрольная имитационная среда, сформированная на сервере, входящем в состав сетевой компьютерной среды, показанной на фиг. 2, на основе прошлых данных измерений, собранных датчиками транспортного средства, входящего в состав сетевой компьютерной среды, показанной на фиг. 2, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[051] На фиг. 6 схематически представлена модифицированная имитационная среда, сформированная на сервере, входящем в состав сетевой компьютерной среды, показанной на фиг. 2, с использованием контрольной имитационной среды, показанной на фиг. 5, на основе смоделированных траекторий движения транспортного средства, входящего в состав сетевой компьютерной среды, показанной на фиг. 2, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[052] На фиг. 7 представлена блок-схема компьютерно-реализуемого способа определения траектории для транспортного средства, входящего в состав сетевой компьютерной среды, показанной на фиг. 2, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
Осуществление изобретения
[053] Представленные здесь примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Очевидно, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[054] Кроме того, чтобы способствовать лучшему пониманию, последующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалисты в данной области техники должны понимать, что различные варианты осуществления настоящей технологии могут быть значительно сложнее.
[055] В некоторых случаях приводятся предположительно полезные примеры модификаций настоящей технологии. Они призваны лишь способствовать пониманию и также не определяют объема или границ настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[056] Описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалисты в данной области техники должны понимать, что все приведенные здесь блок-схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих принципы настоящей технологии. Также следует понимать, что все блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены на машиночитаемом носителе информации и могут выполняться компьютером или процессором независимо от того, показан такой компьютер или процессор в явном виде или нет.
[057] Функции различных элементов, показанных на чертежах, включая все функциональные блоки, обозначенные как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также аппаратных средств, способных обеспечивать работу соответствующего программного обеспечения. Если используется процессор, эти функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или несколькими отдельными процессорами, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные обеспечивать работу программного обеспечения, и может подразумевать, среди прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ. Могут подразумеваться и другие аппаратные средства, общего назначения и/или заказные.
[058] Программные модули или просто модули, реализация которых предполагается на базе программных средств, могут быть представлены здесь в виде любого сочетания элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут реализовываться с помощью аппаратных средств, показанных явно или подразумеваемых.
[059] С учетом вышеизложенных принципов ниже рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящей технологии.
Компьютерная система
[060] На фиг. 1 представлена схема компьютерной системы 100, подходящей для использования в некоторых вариантах осуществления настоящей технологии. Компьютерная система 100 содержит различные аппаратные элементы, включая один или несколько одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120 и память 130, которая может быть оперативной памятью или памятью любого другого вида.
[061] Связь между элементами компьютерной системы 100 может осуществляться через одну или несколько внутренних и/или внешних шин (не показаны), таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д., с которыми различные аппаратные элементы соединены электронными средствами. Согласно вариантам осуществления настоящей технологии, твердотельный накопитель 120 хранит программные команды, пригодные для загрузки в память 130 и выполнения процессором 110 с целью определения наличия объекта. Например, программные команды могут входить в состав управляющего приложения транспортного средства, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может содержать дополнительные и/или необязательные элементы (не показаны), например, модули передачи данных по сети, модули определения местоположения и т.д.
Сетевая компьютерная среда
[062] На фиг. 2 представлена сетевая компьютерная среда 200, пригодная для использования с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или с пользователем (не показан), связанным с транспортным средством 220 (таким как водитель транспортного средства 220). Среда 200 также содержит сервер 235, соединенный с электронным устройством 210 через сеть 240 связи (например, через сеть Интернет и т.п., как более подробно описано ниже).
[063] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии электронное устройство 210 соединено с системами управления транспортного средства 220. Электронное устройство 210 может управлять различными рабочими системами транспортного средства 220, включая, среди прочего, блок управления двигателем, системы рулевого управления, тормозные системы, а также системы освещения и сигнализации (т.е. фары, стоп-сигналы и/или указатели поворота). В таком варианте осуществления транспортное средство 220 может быть беспилотным.
[064] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сетевая компьютерная среда 200 может содержать спутник системы GPS (не показан), передающий сигнал GPS электронному устройству 210 и/или принимающий сигнал GPS от него. Следует понимать, что настоящая технология не ограничивается применением системы GPS и может быть реализована на базе любой другой технологии определения местоположения. Следует отметить, что спутник GPS может вовсе отсутствовать.
[065] Транспортное средство 220, с которым связано электронное устройство 210, может представлять собой любое транспортное средство для отдыха или иных целей, например, личный или коммерческий автомобиль, грузовой автомобиль, мотоцикл и т.д. Несмотря на то, что транспортное средство 220 изображено как наземное транспортное средство, это не является обязательным для каждого не имеющего ограничительного характера варианта осуществления настоящей технологии. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии транспортным средством 220 может быть водное транспортное средство, например, лодка, или воздушное транспортное средство, например, беспилотный летательный аппарат.
[066] Транспортное средство 220 может управляться пользователем или представлять собой автономное (беспилотное) транспортное средство. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии транспортное средство 220 может быть реализовано в виде беспилотного автомобиля. Следует отметить, что при этом не накладывается ограничений на конкретные параметры транспортного средства 220, к числу которых, например, относятся производитель транспортного средства, модель транспортного средства, год выпуска транспортного средства, масса транспортного средства, размеры транспортного средства, распределение массы транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, вид трансмиссии (например, с приводом на два или четыре колеса), вид шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства и рабочий объем двигателя.
[067] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии транспортное средство 220 может быть реализовано в виде роботизированного транспортного средства-доставщика и использоваться для доставки пользователю различных товаров. В связи с этим в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии товары могут включать в себя товары, заказанные пользователем, в частности, потребительские товары, например, с онлайн-платформы объявлений (такой как онлайн-платформа объявлений Yandex™ Market™, онлайн-платформа объявлений Avito™ и т.п.). В данном примере транспортное средство 220 может принадлежать онлайн-платформе объявлений или другой организации, связанной с онлайн-платформой объявлений. В некоторых других не имеющих ограничительного характера вариантах осуществления настоящей технологии транспортное средство 220 может быть реализовано в виде складского роботизированного транспортного средства и использоваться для перемещения, погрузки и/или выгрузки различных товарно-материальных ценностей на складе.
[068] Согласно настоящей технологии, на реализацию электронного устройства 210 не накладывается ограничений. Например, электронное устройство 210 может быть реализовано в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, навигационного устройства транспортного средства (например, TomTom™, Garmin™), планшета, персонального компьютера, встроенного в транспортное средство 220, и т.д. Следует отметить, что электронное устройство 210 может быть связано или не связано с транспортным средством 220 постоянным образом. Дополнительно или в качестве альтернативы электронное устройство 210 может быть реализовано в виде устройства беспроводной связи, такого как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления изобретения электронное устройство 210 содержит дисплей 270.
[069] Электронное устройство 210 может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1, в зависимости от конкретного варианта осуществления. В некоторых вариантах осуществления электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, твердотельный накопитель 120 и память 130. Иными словами, электронное устройство 210 содержит аппаратные средства и/или программное обеспечение и/или микропрограммное обеспечение либо их комбинацию для осуществления обработки данных, как более подробно описано ниже.
[070] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 240 связи представляет собой сеть Интернет. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN, Local Area Network), глобальная сеть (WAN, Wide Area Network), частная сеть связи и т.п. Должно быть понятно, что варианты осуществления сети 240 связи приведены лишь в иллюстративных целях. Между электронным устройством 210 и сетью 240 связи предусмотрена линия связи (отдельно не обозначена), реализация которой зависит, среди прочего, от реализации электронного устройства 210. Для примера можно отметить, что в тех не имеющих ограничительного характера вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано в виде устройства беспроводной связи, такого как смартфон или навигационное устройство, линия связи может быть реализована в виде беспроводной линии связи, но не ограничивается этим. Примерами беспроводных линий связи могут служить, помимо прочего, канал сети связи 3G, канал сети связи 4G и т.п. В сети 240 связи также может использоваться беспроводное соединение с сервером 235.
[071] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован в виде компьютерного сервера и, таким образом, может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1. В одном не имеющем ограничительного характера примере сервер 235 реализован в виде сервера Dell™ PowerEdge™, работающего под управлением операционной системы Microsoft™ Windows Server™, но он также может быть реализован на базе любых других подходящих видов аппаратных средств, программного обеспечения и/или микропрограммного обеспечения либо их сочетания. В представленных не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 представляет собой одиночный сервер. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии функции сервера 235 могут быть распределены между несколькими серверами (не показаны).
[072] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может быть связан с сервером 235 для получения одного или нескольких обновлений. Такие обновления могут включать в себя, среди прочего, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погодных данных и т.п. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 также способен отправлять на сервер 235 определенные рабочие данные, например, информацию о пройденных маршрутах, данные о дорожной обстановке, эксплуатационные данные и т.п. Некоторые или все такие данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или обезличены.
[073] Следует отметить, что электронное устройство 210 может использовать целый ряд датчиков и систем для сбора информации об окружающем пространстве 250 транспортного средства 220. Как показано на фиг. 2, транспортное средство 220 может быть оборудовано множеством систем 280 датчиков. Следует отметить, что для сбора различных видов данных об окружающем пространстве 250 транспортного средства 220 могут применяться различные системы датчиков из множества систем 280 датчиков.
[074] В одном примере множество систем 280 датчиков может содержать различные оптические системы, в том числе одну или несколько систем датчиков типа «камера», установленных на транспортном средстве 220 и связанных с процессором 110 электронного устройства 210, таких как датчик 290 типа «камера». В целом, датчик 290 типа «камера» способен собирать данные в виде изображений (например, отдельных изображений или серии изображений) о разных частях окружающего пространства 250 транспортного средства 220.
[075] Например, в отдельных не имеющих ограничительного характера вариантах осуществления настоящей технологии датчик 290 типа «камера» может быть реализован в виде монохромной камеры с разрешающей способностью, достаточной для обнаружения внешних объектов в окружающем пространстве 250 транспортного средства 220 на расстояниях приблизительно до 80 м, но в объем настоящего изобретения входят и системы камер с другими значениями разрешающей способности и дальности действия. Датчик 290 типа «камера» может быть установлен в верхней части лобового стекла транспортного средства 220 с его внутренней стороны, однако в объем настоящего изобретения входят и другие места, включая заднее окно, боковые окна, передний капот, крышу, переднюю решетку и передний бампер транспортного средства 220. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии датчик 290 типа «камера» может монтироваться в специальном корпусе (не показан), установленном сверху транспортного средства 220.
[076] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии датчик 290 типа «камера» способен охватывать заданную часть окружающего пространства 250 транспортного средства 220. В некоторых вариантах осуществления настоящей технологии датчик 290 типа «камера» способен получать данные изображения, которые представляют сектор окружающего пространства 250 транспортного средства 220 шириной приблизительно 90 градусов в направлении движения транспортного средства 220.
[077] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии датчик 290 типа «камера» способен получать отдельные изображения (или серии изображений), которые представляют сектор окружающего пространства 250 транспортного средства 220 шириной приблизительно 180 градусов в направлении движения транспортного средства 220. В некоторых других не имеющих ограничительного характера вариантах осуществления настоящей технологии датчик 290 типа «камера» способен получать данные изображения, которые представляют сектор окружающего пространства 250 транспортного средства 220 шириной приблизительно 360 градусов в направлении движения транспортного средства 220 (иными словами, все окружающее пространство транспортного средства 220).
[078] В конкретном не имеющем ограничительного характера примере датчик 290 типа «камера» может быть реализован в виде камеры, выпускаемой компанией FLIR INTEGRATED IMAGING SOLUTIONS INC., 12051 Riverside Way, Richmond, BC, V6W 1K7, Canada (Канада). Очевидно, что датчик 290 типа «камера» может быть реализован на базе любого другого подходящего оборудования.
[079] В некоторых случаях данные изображения, предоставленные датчиком 290 типа «камера», могут использоваться электронным устройством 210 для выполнения процедур обнаружения объектов, как подробно описано ниже.
[080] В другом примере множество систем 280 датчиков может содержать одну или несколько систем датчиков типа «радиолокатор» (не обозначены отдельно), установленных на транспортном средстве 220 и связанных с процессором 110 электронного устройства 210. В целом, одна или несколько систем датчиков типа «радиолокатор» могут использовать радиоволны для сбора данных о разных частях окружающего пространства 250 транспортного средства 220. Например, одна или несколько систем датчиков типа «радиолокатор» могут собирать радиолокационные данные о потенциальных внешних объектах транспортного средства 220 и такие данные могут характеризовать расстояние от системы датчиков типа «радиолокатор» до внешних объектов, ориентацию внешних объектов, векторную и/или скалярную скорость внешних объектов и т.п.
[081] Следует отметить, что множество систем 280 датчиков может включать в себя системы датчиков других типов в дополнение к тем, что описаны выше неисчерпывающим образом, в рамках объема настоящей технологии.
[082] Например, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, как показано на фиг. 2, транспортное средство 220 может быть оборудовано по меньшей мере одной лазерной системой обнаружения и измерения дальности (лидарной системой), например, лидарным датчиком 300, для сбора информации об окружающем пространстве 250 транспортного средства 220. Несмотря на то, что описание здесь приведено в контексте установки на транспортном средстве 220, также предполагается, что лидарный датчик 300 может работать автономно или с подключением к другой системе.
[083] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии, лидарный датчик 300 транспортного средства 220 связан с электронным устройством 210. В некоторых не имеющих ограничительного характера вариантах осуществления информация, полученная электронным устройством 210 от лидарного датчика 300, может использоваться, по меньшей мере частично, при управлении транспортным средством 220. Например, в тех вариантах осуществления, в которых транспортное средство 220 является беспилотным, трехмерные карты, созданные на основе информации, полученной лидарным датчиком 300, могут использоваться электронным устройством 210 для управления, по меньшей мере частичного, транспортным средством 220. В еще одном примере процессор 110 электронного устройства 210 способен использовать информацию, полученную лидарным датчиком 300, для обнаружения в реальном времени внешних объектов, присутствующих в окружающем пространстве 250 транспортного средства 220, с целью планирования движения транспортного средства 220.
[084] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии для планирования движения транспортного средства 220 процессор 110 электронного устройства 210 способен строить и/или изменять траекторию движения транспортного средства 220 на основе информации об обнаруженных внешних объектах. Кроме того, хотя большинство примеров, приведенных в описании ниже, относится к планированию движения транспортного средства 220, которое сводится к построению траектории его движения, в более широких не имеющих ограничительного характера вариантах осуществления настоящей технологии планирование движения транспортного средства 220 может предусматривать определение процессором 110 электронного устройства 210 тех или иных параметров движения транспортного средства 220 в заданный момент времени в будущем, таких как дальность перемещения, скорость и/или ускорение транспортного средства 220 в заданный момент времени в будущем.
[085] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, внешний объект может представлять собой движущийся внешний объект и/или неподвижный внешний объект. Например, движущимся внешним объектом может быть, среди прочего, другое транспортное средство, поезд, трамвай, велосипедист или пешеход. Примерами неподвижного внешнего объекта, среди прочего, могут служить светофор, дорожный указатель, уличный фонарь, бордюр, дерево, пожарный гидрант, остановившееся или припаркованное транспортное средство и урна для мусора.
[086] Предполагается, что специалист в данной области имеет представление о функционировании лидарного датчика 300, тем не менее, целесообразно привести его краткое описание. Источник света (например, лазер, не показан) лидарного датчика 300 способен испускать световые лучи, которые после отражения от одного или нескольких внешних объектов в окружающем пространстве 250 транспортного средства 220, рассеиваются обратно к приемнику (не показан) лидарного датчика 300. Фотоны, возвращающиеся к приемнику, собираются оптической системой, а их количество представляется в виде функции времени. В результате процессор 110 электронного устройства 210, используя скорость света (~3×108 м/с), может вычислять расстояние, пройденное фотонами (в направлении туда и обратно). Фотоны могут рассеиваться в обратном направлении множеством различных объектов вокруг транспортного средства 220, таких как частицы (аэрозоли или молекулы) воды, пыли или дыма в атмосфере, другие транспортные средства, неподвижные внешние объекты или возможные препятствия перед транспортным средством 220.
[087] В зависимости от варианта осуществления, транспортное средство 220 может содержать больше или меньше лидарных датчиков 300, чем показано на чертежах. В зависимости от варианта осуществления, выбор конкретных систем из множества систем 280 датчиков может учитывать конкретный вариант осуществления лидарного датчика 300. Лидарный датчик 300 может быть установлен на транспортном средстве 220 изначально или при его модернизации в самых разных местах и/или в самых разных конфигурациях.
[088] Например, в зависимости от исполнения транспортного средства 220 и лидарного датчика 300, лидарный датчик 300 может быть установлен в верхней части лобового стекла транспортного средства 220 с его внутренней стороны. При этом, как показано на фиг. 2, установка лидарного датчика 300 в других местах, включая заднее окно, боковые окна, передний капот, крышу, переднюю решетку, передний бампер и боковину транспортного средства 220 входит в объем настоящей технологии. В некоторых случаях лидарный датчик 300 может монтироваться в специальном корпусе, установленном сверху транспортного средства 220.
[089] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии, например, в показанном на фиг. 2, лидарный датчик 300 установлен на крыше транспортного средства 220 и способен вращаться. В частности, лидарный датчик 300, установленный на транспортном средстве 220 и способный вращаться, может содержать по меньшей мере некоторые элементы, способные поворачиваться на 360 градусов вокруг оси вращения лидарного датчика 300. Лидарный датчик 300, установленный с возможностью вращения, может собирать данные о большей части окружающего пространства 250 транспортного средства 220.
[090] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии, таких как показанный на фиг. 2, лидарный датчик 300 установлен на боковой стороне или на передней решетке и не способен вращаться. В частности, лидарный датчик 300, установленный на транспортном средстве 220 без возможности вращения, может содержать по меньшей мере некоторые элементы, не способные поворачиваться на 360 градусов, но способные собирать данные о заданных частях окружающего пространства 250 транспортного средства 220.
[091] Независимо от конкретного места установки и/или конкретного варианта исполнения, лидарный датчик 300 может собирать данные об окружающем пространстве 250 транспортного средства 220, например, для построения многомерной карты внешних объектов в окружающем пространстве 250 транспортного средства 220. Ниже приведено описание устройства лидарного датчика 300 с точки зрения сбора данных об окружающем пространстве 250 транспортного средства 220.
[092] В конкретном не имеющем ограничительного характера примере лидарный датчик 300 может быть реализован в виде лидарного датчика, выпускаемого компанией VELODYNE LiDAR, INC, 5521 Hellyer Avenue, San Jose, CA 95138, United States of America (США). Очевидно, что лидарный датчик 300 может быть реализован на базе любого другого подходящего оборудования.
[093] Следует отметить, что хотя в приведенном здесь описании лидарный датчик 300 реализован как «времяпролетная лидарная система» и в связи с этим содержит соответствующие элементы, свойственные такой реализации, допускаются и другие варианты осуществления лидарного датчика 300 без отступления от существа и объема настоящей технологии. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии лидарный датчик 300 может быть реализован как лидарная система с непрерывным частотно-модулированным сигналом (FMCW, Frequency-Modulated Continuous Wave) согласно одному или нескольким вариантам реализации и на основе соответствующих им элементов, которые описаны в патентной заявке US2021373172A1 «LiDAR detection methods and systems» («Лидарные способы и системы обнаружения») этого же заявителя, опубликованной 2 декабря 2021 года, содержание которой полностью включено в настоящий документ посредством ссылки.
[094] На фиг. 3 схематически представлена процедура 302 сбора лидарных данных, выполняемая процессором 110 электронного устройства 210 для формирования данных 310 трехмерного облака точек, которые представляют внешний объект, присутствующий в окружающем пространстве 250 транспортного средства 220, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[095] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процедура 302 сбора лидарных данных для получения данных 310 трехмерного облака точек может выполняться непрерывно. В других вариантах осуществления настоящей технологии процедура 302 сбора лидарных данных для получения данных 310 трехмерного облака точек может выполняться с заданной периодичностью, например, каждые 2 миллисекунды или с любым другим подходящим интервалом времени.
[096] Для выполнения процедуры 302 сбора лидарных данных во время движения транспортного средства 220 по дороге 304 процессор 110 электронного устройства 210 способен собирать данные 306 датчика, представляющие объекты в окружающем пространстве 250 транспортного средства 220, с помощью лидарного датчика 300. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, процессор 110 способен получать данные 306 датчика, представляющие объекты в окружающем пространстве 250 транспортного средства 220, в разных местах дороги 304 в виде одного или нескольких трехмерных облаков точек, таких как трехмерное облако 312 точек.
[097] В общем случае трехмерное облако 312 точек представляет собой совокупность лидарных точек в виде трехмерного облака точек, в котором отдельно взятая лидарная точка 314 является точкой в трехмерном пространстве, характеризующей по меньшей мере часть поверхности конкретного внешнего объекта на дороге 304 или рядом с ней. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии трехмерное облако 312 точек может быть разделено на слои, точки каждого из которых образуют эллипс, при этом начальные точки всех эллиптических слоев считаются имеющими одинаковую ориентацию.
[098] Отдельно взятая лидарная точка 314 в трехмерном облаке 312 точек связана с параметрами 316 лидара (обозначенным на фиг. 3 как L1, L2 и Ln). Не имеющими ограничительного характера примерами параметров 316 лидара могут служить расстояние, интенсивность света, угол, а также другие параметры, относящиеся к данным, которые могут собираться лидарным датчиком 300. Лидарный датчик 300 может формировать трехмерное облако точек на каждом временном шаге t во время движения транспортного средства 220, в результате чего образуется совокупность аналогичных трехмерных облаков точек, содержащих данные 310 трехмерных облаков точек об окружающем пространстве 250 транспортного средства 220.
[099] Предполагается, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 способен дополнять трехмерное облако 312 точек данными изображения, полученными от датчика 290 типа «камера». Для этого процессор 110 способен использовать одно или несколько решений из патента US11551365B2 «Methods and systems for computer-based determining of presence of objects» («Способы и системы компьютерного определения наличия объектов») этого же заявителя, опубликованного 23 января 2023 года, содержание которого полностью включено в настоящий документ посредством ссылки.
[0100] Кроме того, как показано на фиг. 2, используя трехмерное облако 312 точек, процессор 110 способен (1) обнаруживать объекты в окружающем пространстве 250 транспортного средства 220 и (2) на основе обнаруженных объектов определять траекторию движения транспортного средства 220. На фиг. 4 схематически представлено транспортное средство 220, движущееся в пределах участка 402 дороги, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[0101] Как показано на фиг. 4, после выезда на перекресток на участке 402 дороги транспортное средство 220 в соответствии с заданной для него (предварительной) траекторией движения способно выполнять поворот 404 направо на пересекающую дорогу. При этом во избежание столкновения с приближающимся транспортным средством 420, движущимся по пересекающей дороге в прямом направлении 406, транспортное средство 220 должно быть способным (1) обнаруживать приближающееся транспортное средство 420 и (2) принимать определенные корректирующие меры по отношению к ранее заданной траектории движения, например, замедляться, ускоряться или тормозить, таким образом перестраивая траекторию движения транспортного средства 220.
[0102] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, для обнаружения приближающегося транспортного средства 420 процессор 110 способен определять (1) местоположение приближающегося транспортного средства 420 в системе координат транспортного средства 220 и (2) класс объектов для приближающегося транспортного средства 420.
[0103] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, процессор 110 транспортного средства 220 способен итеративно определять траекторию движения транспортного средства 220, чтобы корректировать ее в зависимости от текущего состояния окружающего пространства и своевременно реагировать на внешние объекты. В частности, на каждой итерации (длительность которой может составлять, например, 0,1, 1 или 5 мс либо 1, 10 или 20 с) процессор 110 способен (1) определять местоположение и классы объектов в окружающем пространстве 250, таких как приближающееся транспортное средство 402, (2) на основе местоположения и класса объектов определять поведение приближающегося транспортного средства 420 на заданной итерации, например, определять, что оно движется в прямом направлении 406, и (3) на основе местоположения, класса объектов и поведения приближающегося транспортного средства 420 формировать траекторию движения для транспортного средства 220 на заданной итерации.
[0104] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии для определения классов внешних объектов процессор 110 способен использовать первый алгоритм 260 машинного обучения, реализованный на сервере 235 и обеспечивающий обнаружение объектов в окружающем пространстве 250 транспортного средства 220. В не имеющих ограничительного характера вариантах осуществления настоящей технологии первый алгоритм 260 машинного обучения может быть реализован на основе нейронных сетей (NN, Neural Network), таких как сверточная нейронная сеть (CNN, Convolutional Neural Network), нейронная сеть на основе модели-трансформера и т.п., как более подробно описано ниже.
[0105] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, для определения классов внешних объектов первый алгоритм 260 машинного обучения способен обучаться определению множества признаков объекта, характеризующих внешний объект. Для примера можно отметить, что помимо прочего, когда внешним объектом является приближающееся транспортное средство 420, признаки объекта могут включать в себя, среди прочего, (1) тип заданного внешнего объекта, например, подвижный объект, (2) тип подвижного объекта, например, неодушевленный объект, (3) тип подвижного неодушевленного объекта, например, транспортное средство, (4) марку и модель приближающегося транспортного средства 420, (5) год выпуска приближающегося транспортного средства 420, (6) тип кузова приближающегося транспортного средства 420, например, седан, хетчбэк, универсал, минивэн и т.д., (7) тип приближающегося транспортного средства 420 с точки зрения управления, например, традиционное (управляемое водителем) или самоуправляемое (т.е. другой беспилотный автомобиль), (8) текущую скорость приближающегося транспортного средства 420 в прямом направлении 406, (9) расстояние 408 от транспортного средства 220 до приближающегося транспортного средства 420 и т.д.
[0106] В другом примере, где заданным внешним объектом является пешеход (не показан), признаки объекта могут включать в себя, среди прочего, (1) тип объекта, например, подвижный объект, (2) тип подвижного объекта, например, одушевленный объект, (3) тип подвижного одушевленного объекта, например, человек, (4) пол человека, например, женщина, (5) рост пешехода, (6) массу пешехода, (7) возрастную группу пешехода, например, взрослый или ребенок, (8) текущее направление движения пешехода, (9) текущую скорость пешехода в текущем направлении движения пешехода, (10) расстояние до пешехода и т.д.
[0107] В еще одном примере, где заданным внешним объектом является светофор 410, признаки объекта могут включать в себя, среди прочего, (1) тип объекта, например, неподвижный объект, (2) тип неподвижного объекта, например, объект регулирования дорожного движения, (3) тип объекта регулирования дорожного движения, например, светофор, (4) высоту светофора 410, (5) расстояние до светофора 410 и т.д.
[0108] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен обучать первый алгоритм 260 машинного обучения, используя первый обучающий набор данных, содержащий первое множество обучающих цифровых объектов, каждый из которых включает в себя (1) обучающую ограничивающую рамку, построенную вокруг по меньшей мере одного обучающего внешнего объекта, зафиксированного в заданной части окружающего пространства 250 на участке дороги для обучения (не показан) (такую как ограничивающая рамка 421, построенная вокруг приближающегося транспортного средства 420), (2) вектор признаков, содержащий признаки, представляющие по меньшей мере один обучающий объект, и (3) метку, характеризующую местоположение и класс объекта для по меньшей мере одного обучающего объекта в заданной части окружающего пространства 250. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, признаки, представляющие по меньшей мере один обучающий объект, могут включать в себя, среди прочего, (1) площадь поверхности, определяемой обучающей ограничивающей рамкой, (2) количество лидарных точек, попавших внутрь обучающей ограничивающей рамки, (3) плотность лидарных точек внутри обучающей ограничивающей рамки, (4) значения интенсивности света во всех лидарных точках, попавших внутрь обучающей ограничивающей рамки, и т.д.
[0109] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии обучение первого алгоритма 260 машинного обучения на сервере 235 может быть реализовано, как описано в патентной заявке RU2023119351 «Method and system of determining a trajectory for an autonomous vehicle» («Способ и система для определения траектории автономного транспортного средства») этого же заявителя, поданной 21 июля 2023 года, содержание которой полностью включено в настоящий документ посредством ссылки. При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии первый алгоритм 260 машинного обучения может обучаться сторонним сервером (не показан), а сервер 235 способен получать доступ к первому алгоритму 260 машинного обучения через сеть 240 связи или локально.
[0110] Кроме того, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, для определения поведения приближающегося транспортного средства 402 на заданной итерации, процессор 110 электронного устройства 210, связанного с транспортным средством 220, способен использовать второй алгоритм 360 машинного обучения, который также может выполняться на сервере 235 и может быть обучен определению поведения подвижных внешних объектов, таких как другое транспортное средство или пешеход, на основе различных признаков таких объектов. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии второй алгоритм 360 машинного обучения может быть реализован на основе нейронной сети, как и первый алгоритм 260 машинного обучения.
[0111] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии поведение подвижного внешнего объекта может включать в себя, среди прочего, начало или продолжение движения, остановку, ускорение, замедление, маневрирование и т.п. Таким образом, для обучения второго алгоритма 360 машинного обучения определению поведения подвижного внешнего объекта в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен использовать второй обучающий набор данных, содержащий второе множество обучающих цифровых объектов, каждый из которых включает в себя (1) обучающие данные измерений, полученные от множества систем 280 датчиков и характеризующие заданную часть окружающего пространства 250 на участке дороги для обучения (не показан) на заданной итерации обучения, (2) обучающий вектор признаков, содержащий множество обучающих признаков одного или нескольких обучающих подвижных внешних объектов, присутствующих в заданной части окружающего пространства 250, и (3) метку, характеризующую обучающее поведение одного или нескольких обучающих подвижных внешних объектов на заданной и последующих итерациях обучения.
[0112] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии обучающими данными измерений могут быть прошлые данные измерений, собранные электронным устройством 210 с использованием множества систем 280 датчиков на заданной (прошлой) итерации обучения. Таким образом, участок дороги для обучения может характеризовать окружающее пространство 250 транспортного средства 220 на заданной итерации обучения (например, в некоторый момент времени на заданной итерации обучения), включая местоположение и классы прошлых объектов. В связи с этим обучающие данные измерений, собранные на разных итерациях обучения, могут, например, относиться к одному и тому же прошлому объекту (например, к светофору), но представлять собой результаты измерений, выполненных множеством систем 280 датчиков с разных ракурсов, при разных уровнях освещенности или в разных положениях относительно других прошлых объектов на участках дороги для обучения, в частности, при перекрытии одного прошлого объекта другим прошлым объектом или при его расположении перед (или над) другим прошлым объектом. Кроме того, обучающие данные измерений на заданной итерации обучения могут включать в себя, среди прочего, данные, характеризующие дорожную разметку, пешеходные зоны (например, пешеходные переходы), снежные заносы, заборы, дорожные ограждения и т.д.
[0113] Кроме того, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, обучающий вектор признаков может формироваться с помощью подходящих алгоритмов кодирования, способных представлять обучающие данные измерений, собранные на участке дороги для обучения на заданной итерации обучения, в формате, пригодном для использования выбранным вариантом реализации алгоритма 360 машинного обучения, например, нейронной сетью, как указано выше.
[0114] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии второй алгоритм 360 машинного обучения может быть обучен определению поведения внешних объектов в зависимости от текущей траектории движения транспортного средства 220 на заданной итерации или на по меньшей мере одной предыдущей итерации из множества итераций. В связи с этим в таких вариантах осуществления заданный обучающий цифровой объект из второго множества обучающих цифровых объектов может дополнительно содержать данные, характеризующие обучающую траекторию движения транспортного средства 220 на заданной итерации обучения или на по меньшей мере одной предыдущей итерации обучения. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, данные, характеризующие обучающую траекторию движения, могут включать в себя, среди прочего, обучающие параметры движения (такие как скорость, ускорение, скорость изменения ускорения и т.п.) транспортного средства 220, данные, характеризующие маневры, такие как смена полосы движения, разворот, съезд с автомагистрали, и т.п.
[0115] Как и в случае с первым алгоритмом 260 машинного обучения, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен получать доступ ко второму алгоритму 360 машинного обучения, который был обучен сторонним сервером (не показан), через сеть 240 связи.
[0116] Кроме того, для формирования траектории движения транспортного средства 220 в зависимости от поведения приближающегося транспортного средства 402 на заданной итерации процессор 110, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, способен выполнять алгоритм 460 планирования движения. В общем случае алгоритм 460 планирования движения способен формировать траекторию транспортного средства 220 на каждой итерации на основе местоположения, классов и/или поведения объектов в окружающем пространстве 250. В частности, в продолжение примера, показанного на фиг. 4, процессор 110 способен, используя алгоритм 460 планирования движения, определять текущие кинематические характеристики объекта, в том числе текущие параметры движения объекта (например, текущие скорость, ускорение, скорость изменения ускорения, характер торможения и т.п.), для приближающегося транспортного средства 402 в прямом направлении 406. Кроме того, в зависимости от текущих кинематических характеристик объекта, процессор 110 способен определять текущие кинематические характеристики транспортного средства 220 на заданной итерации и обеспечивать движение транспортного средства 220 с текущими кинематическими характеристиками в направлении поворота 404 направо таким образом, чтобы не допустить его столкновения с приближающимся транспортным средством 402 и/или с любым другим объектом в окружающем пространстве 250.
[0117] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии алгоритм 460 планирования движения может включать в себя кинематическую модель. В общем случае кинематическая модель 402 представляет собой совокупность математических моделей, обеспечивающих вычисление текущих кинематических характеристик для внешних объектов транспортного средства 220. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии кинематическая модель может быть реализована, как описано в патенте US11753037B2 «Method and processor for controlling in-lane movement of autonomous vehicle» («Способ и процессор для управления движением автономного транспортного средства по полосе») этого же заявителя, выданном 12 сентября 2023 года, содержание которого полностью включено в настоящий документ посредством ссылки. При этом без отступления от существа и объема настоящей технологии возможны и другие варианты реализации алгоритма 460 планирования движения, например, включающие в себя алгоритм машинного обучения. Как должно быть понятно из приведенного ниже описания, может быть предусмотрено несколько версий алгоритма 460 планирования движения, пригодных для загрузки в электронное устройство 210 с целью их выполнения процессором 110 при формировании траекторий движения транспортного средства 220. Каждая из версий алгоритма 460 планирования движения способна формировать для заданного направления движения, например, для поворота 404 направо, как в примере на фиг. 4, собственные траектории движения с собственными кривизной и кинематическими характеристиками транспортного средства.
[0118] При этом одной из проблем, с которой может столкнуться транспортное средство 220 при движении по заданному маршруту, является обнаружение внезапно возникающих объектов и объектов, неизвестных первому алгоритму 260 машинного обучения. Например, неизвестными объектами могут оказываться, среди прочего, объекты сравнительно редко встречающихся классов, такие как человек с коляской, человек в инвалидной коляске, крупный скот (например, овца, свинья или корова, особенно на городской территории). С другой стороны, внезапно возникающими объектами становятся объекты, которые не могут быть обнаружены множеством систем 280 датчиков транспортного средства на части заданной итерации, например, из-за того, что их перекрывают другие объекты. К таким объектам также могут относиться объекты, движущиеся с относительно высокой скоростью, в частности, среди прочего, убегающее животное, велосипедист или другое транспортное средство. Таким образом, поскольку подобные объекты обнаруживаются множеством систем 280 датчиков только в определенный момент времени на заданной итерации, процессор 110 может не успевать определять классы, поведение и текущие кинематические характеристики этих объектов, что может приводить к неточному определению траектории движения транспортного средства 220.
[0119] Одним из эффективных решений вышеуказанной технической проблемы могут служить (1) обучение первого и второго алгоритмов 260, 360 машинного обучения обнаружению объектов всех возможных классов и, соответственно, последующего определения поведения этих объектов и (2) тестирование новых версий алгоритма 460 планирования движения на основе прогнозов, формируемых первым и вторым алгоритмами 260, 360 машинного обучения для этих конкретных объектов. При этом следует понимать, что обучение первого и второго алгоритмов 260, 360 машинного обучения обнаружению и определению поведения дополнительных объектов может приводить (1) к значительному увеличению затрат времени и усилий на разметку наборов данных, а также (2) к увеличению объема вычислительных ресурсов сервера 235 и/или процессора 110 электронного устройства 210, необходимых для обучения и использования первого и второго алгоритмов 260, 360 машинного обучения.
[0120] Соответственно, разработчики настоящей технологии установили, что данные измерений, собранные множеством систем 280 датчиков в прошлом и характеризующие указанные объекты, можно использовать для формирования имитационной среды, позволяющей тестировать разные версии алгоритма 460 планирования движения. Разные версии алгоритма 460 планирования движения могут использоваться для построения разных смоделированных траекторий, которые в дальнейшем могут анализироваться с точки зрения безопасности. Кроме того, версии алгоритма 460 планирования движения, обеспечившие построение смоделированных траекторий, признанных безопасными, могут быть использованы при формировании траекторий движения транспортного средства 220 во время его функционирования.
[0121] Ниже приведено описание способа формирования имитационной среды в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
Имитационная среда
[0122] На фиг. 5 схематически представлена контрольная имитационная среда 500, сформированная сервером 235 и характеризующая движение транспортного средства 220 по прошлому участку 502 дороги на первой, второй и третьей прошлых итерациях 501 (T1), 503 (T2) и 505 (T3), в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии. Очевидно, что в представленном примере транспортное средство 220 движется по прошлому участку 502 дороги в первом направлении 510, то есть в направлении переднего хода транспортного средства 220 или слева направо в ориентации, показанной на фиг. 5.
[0123] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, для формирования контрольной имитационной среды 500 сервер 235 способен использовать прошлые данные измерений, собранные множеством систем 280 датчиков транспортного средства 220 и полученные процессором 110 электронного устройства 210. Как указано выше, прошлые данные измерений могут включать в себя данные, характеризующие местоположение, классы и поведение прошлых внешних объектов на каждой прошлой итерации из множества прошлых итераций, таких как первая, вторая и третья прошлые итерации 501, 503 и 505.
[0124] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен определять классы прошлых внешних объектов, используя первый алгоритм 260 машинного обучения, обученный, как указано выше. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен запрашивать у людей-оценщиков сформированные ими метки, характеризующие классы прошлых внешних объектов. Например, в таких вариантах осуществления сервер 235 способен отправлять прошлые данные измерений в машиночитаемом формате через сеть 240 связи на краудсорсинговую платформу (такую как краудсорсинговая платформа Yandex™ Toloka™ или краудсорсинговая платформа Amazon™ Mechanical Turk™) с заданием на разметку. Например, если сервер 235 не смог распознать объект 504 как человека в инвалидной коляске с помощью первого алгоритма 260 машинного обучения, сервер 235 может получить метку для объекта 504 от человека-оценщика.
[0125] Как показано на фиг. 5, объект 504 (человек в инвалидной коляске) пересекает прошлый участок 502 дороги перед транспортным средством 220 во втором направлении 512, перпендикулярном первому направлению 510. Соответственно, на каждой из первой, второй и третьей прошлых итераций 501, 503 и 505 процессор 110 электронного устройства 210 способен (1) обнаруживать объект 504, используя первый алгоритм 260 машинного обучения, (2) определять, используя второй алгоритм 360 машинного обучения, прошлое поведение объекта 504, намеревающегося пересечь прошлый участок 502 дороги по пешеходному переходу (отдельно не обозначен) во втором направлении 512, и (3) определять на основе прошлого поведения, используя прошлую версию алгоритма 460 планирования движения, прошлые кинематические характеристики транспортного средства 220, задающие его прошлую траекторию на каждой из первой, второй и третьей прошлых итераций 501, 503 и 505. Как показано в примере на фиг. 5, каждая из прошлых траекторий движения транспортного средства 220 предусматривала уступку дороги объекту 504.
[0126] Таким образом, за счет формирования контрольной имитационной среды 500 на основе прошлых данных измерений сервер 235 способен моделировать прошлое фактическое движение транспортного средства 220 и соответствующее прошлое поведение прошлых внешних объектов на прошлом участке дороги 502. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен формировать контрольную имитационную среду 500 в виде двумерной имитационной среды, характеризующей движение транспортного средства 220 и прошлых внешних объектов на прошлом участке 502 дороги в заданной проекции, например, на виде сверху, как схематически представлено на фиг. 5. В таких вариантах осуществления контрольная имитационная среда 500 может быть представлена в виде последовательности изображений, характеризующих местоположение транспортного средства 220 и внешних объектов на прошлом участке 502 дороги на каждой прошлой итерации. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен формировать контрольную имитационную среду 500 в виде трехмерной имитационной среды, в которой транспортное средство 220 и прошлые внешние объекты представляются в виде трехмерных моделей, содержащих, например, элементы сетки.
[0127] Кроме того, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, сервер 235 способен использовать контрольную имитационную среду 500 для тестирования новых версий алгоритма 460 планирования движения с целью их последующего использования при формировании новых траекторий для транспортного средства 220. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен обеспечивать имитационное моделирование таких новых траекторий в контрольной имитационной среде 500 перед их использованием для управления фактическим движением транспортного средства 220.
[0128] Смоделированная траектория транспортного средства 220 на прошлом участке 502 дороги может отличаться от прошлой траектории (1) кинематическими характеристиками транспортного средства 220 и/или (2) геометрией пути движения, определяемой смоделированной траекторией. В частности, за счет изменения прошлых кинематических характеристик транспортного средства 220 сервер 235 способен обеспечивать движение транспортного средства 220 в первом направлении 510 (1) с большей или меньшей скоростью, (2) с ускорением или замедлением и/или (3) с большей или меньшей скоростью изменения ускорения. С другой стороны, за счет изменения геометрии прошлой траектории сервер 235 способен обеспечивать отклонение транспортного средства 220 от первого направления 510. Например, используя одну из новых версий алгоритма 460 планирования движения, сервер 235 способен обеспечивать смену полосы движения транспортным средством 220 на одной из итераций моделирования.
[0129] После формирования сервером 235 смоделированной траектории для транспортного средства 220 сервер 235 дополнительно способен обеспечивать моделирование движения транспортного средства 220 в контрольной имитационной среде 500. При этом смоделированное движение транспортного средства 220 может конфликтовать с движением прошлых внешних объектов в контрольной имитационной среде 500. Например, если смоделированная траектория по меньшей мере на одной из первой, второй и третьей прошлых итераций 501, 503 и 505 предусматривает обеспечение движения транспортного средства 220 с большей скоростью, представления транспортного средства 220 и объекта 504 в контрольной имитационной среде 500 могут перекрываться. Такой способ моделирования движения транспортного средства 220 может оказаться малоэффективным для тестирования новых версий алгоритма 460 планирования движения, поскольку он не позволяет определять реакцию внешних объектов на изменение траектории движения транспортного средства 220, а также оценивать безопасность и/или комфортность смоделированных траекторий для пассажиров транспортного средства 220 и других участников дорожного движения.
[0130] Таким образом, разработчики настоящей технологии установили, что для более реалистичного моделирования движения транспортного средства 220 и оценки комфортности и безопасности смоделированных траекторий, контрольная имитационная среда 500 может динамически изменяться в зависимости от смоделированной траектории движения транспортного средства 220. Иными словами, в соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии, после построения каждой новой смоделированной траектории движения транспортного средства 220 сервер 235 способен уточнять поведение внешних объектов в контрольной имитационной среде 500 на каждой итерации моделирования, тем самым формируя модифицированную имитационную среду, такую как модифицированная имитационная среда 600.
[0131] На фиг. 6 схематически представлена модифицированная имитационная среда 600, сформированная сервером 235 с использованием новой версии алгоритма 460 планирования движения на первой, второй и третьей итерациях моделирования 601 (T1'), 603 (T2') и 605 (T3'), в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, заданная итерация моделирования из множества итераций моделирования, например, одна из первой, второй и третьей итераций моделирования 601, 603 и 605, может совпадать по длительности с соответствующей прошлой итерацией. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии заданная итерация моделирования может иметь как меньшую, так и большую длительность в сравнении с соответствующей прошлой итерацией.
[0132] В примере, показанном на фиг. 6, начальные положения транспортного средства 220 и объекта 504 на прошлом участке 502 дороги, то есть их положения в начале первой итерации 601 моделирования, совпадают с начальными положениями транспортного средства 220 и объекта 504 в начале первой прошлой итерации 501 в контрольной имитационной среде 500.
[0133] На первой итерации 601 моделирования сервер 235 может, используя новую версию алгоритма 460 планирования движения и прошлые данные измерений (использованных сервером 235 для формирования контрольной имитационной среды 500), сформировать первую смоделированную траекторию для транспортного средства 220, определяемую первыми смоделированными кинематическими характеристиками транспортного средства 220 и первым направлением 510. Из фиг. 6 и 5 очевидно, что транспортное средство 220 с первыми смоделированными кинематическими характеристиками движется быстрее в первом направлении 510 на первой итерации 601 моделирования, чем с прошлыми кинематическими характеристиками на первой прошлой итерации 501.
[0134] Кроме того, сервер 235, используя второй алгоритм 360 машинного обучения, может определить первое смоделированное поведение объекта 504 на первой итерации 601 моделирования на основе первой смоделированной траектории. Например, сервер 235 способен определить, что во избежание столкновения с транспортным средством 220 на первой итерации 601 моделирования объект 504 не должен двигаться во втором направлении 512, а должен оставаться в исходном положении, поскольку транспортное средство 220 движется по первой смоделированной траектории относительно быстро.
[0135] Кроме того, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, сервер 235 может определить, отличается ли первое смоделированное поведение объекта 504 от соответствующего прошлого поведения этого объекта в контрольной имитационной среде 500. Очевидно, что в текущих примерах прошлое поведение объекта 504 на первой прошлой итерации 501 (соответствующей первой итерации 601 моделирования) заключается в пересечении прошлого участка 502 дороги во втором направлении 512, а в модифицированной имитационной среде 600 объект 504 остается неподвижным на первой итерации 601 моделирования.
[0136] Таким образом, при определении того, что первое смоделированное поведение объекта 504 отличается от соответствующего прошлого поведения этого объекта на первой итерации 601 моделирования, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 способен заменять прошлое поведение объекта 504 на первое смоделированное поведение по меньшей мере на одной последующей итерации моделирования из множества итераций моделирования. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологи сервер 235 способен заменять прошлое поведение объекта 504 на заданном количестве последующих итераций моделирования, например, на 1, 5 или 10 итерациях. На последующей итерации моделирования после заданного количества последующих итераций моделирования сервер 235 способен (1) уточнять смоделированное поведение объекта 504 и (2) сравнивать смоделированное поведение объекта 504 на последующей итерации моделирования с прошлым поведением этого объекта на первой прошлой итерации 501.
[0137] Например, сервер 235 может заменить прошлое поведение объекта 504 на второй итерации 603 моделирования на первое смоделированное поведение, тем самым обеспечив неподвижность объекта 504 на второй итерации 603 моделирования.
[0138] При этом на второй итерации 603 моделирования сервер 235 способен, используя новую версию алгоритма 460 планирования движения, определять вторую смоделированную траекторию для транспортного средства 220, включая вторые смоделированные кинематические характеристики транспортного средства 220, с которыми транспортное средство 220 продолжает двигаться в первом направлении 510, пока объект 504 остается неподвижным. Очевидно, что в результате назначения первого смоделированного поведения объекту 504, визуальные представления транспортного средства 220 и объекта 504 не перекрываются при движении транспортного средства 220 по смоделированным траекториям.
[0139] Наконец, на третьей итерации 605 моделирования сервер 235 способен формировать третью смоделированную траекторию для транспортного средства 220, включая третьи смоделированные кинематические характеристики, с которыми транспортное средство 220 движется в первом направлении 510 на прошлом участке 502 дороги. Кроме того, как указано выше, на третьей итерации 605 моделирования сервер 235 способен уточнять, соответствует ли текущее смоделированное поведение объекта 504 прошлому поведению этого объекта на первой прошлой итерации 501. В частности, на третьей итерации 605 моделирования сервер 235 может (1) определить третье смоделированное поведение объекта 504 на основе третьей смоделированной траектории движения транспортного средства 220, используя второй алгоритм 360 машинного обучения, и (2) решить, отличается ли третье смоделированное поведение объекта 504 на третьей итерации 605 моделирования от соответствующего прошлого поведения объекта 504 на первой прошлой итерации 501.
[0140] Например, поскольку на третьей итерации 605 моделирования второе направление 512 уже свободно от транспортного средства 220, сервер 235 может, используя второй алгоритм 360 машинного обучения, определить третье смоделированное поведение объекта 504, соответствующее прошлому поведению этого объекта на первой прошлой итерации 501, то есть его движению во втором направлении 512 с целью пересечения прошлого участка 502 дороги по пешеходному переходу.
[0141] Таким образом, сервер 235 способен продолжать моделирование движения транспортного средства 220 на последующих итерациях моделирования, корректируя поведение прошлых внешних объектов в зависимости от текущих смоделированных траекторий движения транспортного средства 220, тем самым формируя на основе контрольной имитационной среды 500 экземпляр модифицированной имитационной среды 600. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, сервер 235 способен продолжать моделирование движения транспортного средства 220 на последующих итерациях моделирования из множества итераций моделирования до наступления события останова.
[0142] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии событие останова может быть связано с безопасностью смоделированной траектории движения транспортного средства 220. Например, событие останова может включать в себя столкновение между транспортным средством 220 и другим объектом (не показан) на прошлом участке 502 дороги в модифицированной имитационной среде 600. Предположим, что на первой итерации 601 моделирования другой объект также намеревается двигаться во втором направлении 512, но не обнаруживается транспортным средством 220, например, из-за перекрытия объектом 504. В таком случае сервер 235 может оказаться не в состоянии определить смоделированное поведение другого объекта и либо на первой итерации 601 моделирования, либо на одной из второй и третьей итераций 603, 605 моделирования другой объект может начать двигаться во втором направлении 512 и столкнуться с транспортным средством 220.
[0143] Другими примерами события останова являются, среди прочего, достижение заданной скорости изменения ускорения транспортного средства 220 на смоделированной траектории, достижение заданного количества смен полосы движения, нарушение правил дорожного движения, пересечение транспортным средством 220 зоны безопасности, установленной вокруг другого участника дорожного движения на прошлом участке 502 дороги, и т.п.
[0144] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, при наступлении события останова сервер 235 способен (1) прерывать моделирование движения транспортного средства 220 с использованием текущей новой версии алгоритма 460 планирования движения, (2) исключать эту новую версию алгоритма 460 планирования движения из дальнейшего рассмотрения при формировании фактических траекторий движения транспортного средства 220 и (3) приступать к тестированию другой новой версии алгоритма 460 планирования движения в контрольной имитационной среде 500. Иными словами, в таких вариантах осуществления сервер 235 способен (1) отменять все изменения, внесенные в контрольную имитационную среду 500 в ходе тестирования новой версии алгоритма 460 планирования движения, и (2) начинать тестировать его другую новую версию с самого начала, как описано выше.
[0145] При этом, если после достижения заданного порогового количества итераций моделирования с использованием той или иной новой версии алгоритма 460 планирования движения, например, 100, 5000 или 1 000 000 итераций, событие останова не наступает, то в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологи сервер 235 способен сохранять эту новую версию алгоритма 460 планирования движения в памяти 130 сервера 235 с целью ее использования при формировании фактических траекторий для навигации транспортного средства 220 во время его функционирования. Иными словами, если новая версия алгоритма 460 планирования движения прошла тестирование в контрольной имитационной среде 500, то сервер 235 способен передавать эту версию алгоритма 460 планирования движения на электронное устройство 210, тем самым предоставляя процессору 110 электронного устройства 210 возможность использовать эту новую версию алгоритма 460 планирования движения при формировании фактических траекторий движения транспортного средства 220, как описано выше со ссылкой на фиг. 4.
[0146] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 дополнительно способен тестировать другую новую версию алгоритма 460 планирования движения в модифицированной имитационной среде 600, сформированной в ходе тестирования заданной новой версии алгоритма 460 планирования движения.
[0147] Таким образом, сервер 235 способен формировать модифицированную имитационную среду 600, характеризующую реальные условия, для моделирования движения транспортного средства 220 по смоделированным траекториям, сформированным новыми версиями алгоритма 460 планирования движения. В зависимости от смоделированного таким способом движения транспортного средства 220, сервер 235 может либо отказаться от дальнейшего использования новой версии алгоритма 460 планирования движения, либо сохранить ее для определения рабочих траекторий движения транспортного средства 220 во время его функционирования.
Способ
[0148] С учетом описанной выше архитектуры и приведенных примеров возможна реализация способа определения траектории движения транспортного средства 220. На фиг. 7 представлена блок-схема способа 700 в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии. Способ 700 может быть реализован на сервере 235.
Шаг 702: получение данных о движении транспортного средства на заданном участке дороги, включая данные о внешних объектах транспортного средства на этом участке дороги.
[0149] Способ 700 начинается с шага 702, на котором сервер 235 способен получать прошлые данные измерений, характеризующие прошлое движение транспортного средства 220 на прошлом участке 502 дороги. Как указано выше, прошлые данные измерений могут собираться множеством систем 280 датчиков транспортного средства 220, получаться процессором 110 электронного устройства 210 и передаваться на сервер 235.
[0150] Как указано выше, прошлые данные измерений могут включать в себя данные, характеризующие местоположение прошлого внешнего объекта, такого как объект 504, класс объекта 504 и прошлое поведение объекта 504 на каждой прошлой итерации из множества прошлых итераций формирования прошлых траекторий движения транспортного средства 220, таких как первая, вторая и третья прошлые итерации 501, 503 и 505, как подробно описано выше со ссылкой на фиг. 5.
[0151] Следующим шагом в способе 700 является шаг 704.
Шаг 704: формирование на основе данных о движении контрольной имитационной среды для моделирования движения транспортного средства, характеризующей контрольное поведение каждого внешнего объекта транспортного средства на заданном участке дороги на множестве итераций моделирования.
[0152] На шаге 704, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, сервер 235 способен на основе прошлых данных измерений формировать контрольную имитационную среду 500, как описано выше со ссылкой на фиг. 5. Контрольная имитационная среда 500 характеризует фактическое прошлое движение транспортного средства 220 и соответствующее прошлое поведение его прошлых внешних объектов, таких как объект 504, на каждой из первой, второй и третьей прошлых итераций 501, 503 и 505.
[0153] Следующим шагом в способе 700 является шаг 706.
Шаг 706: формирование смоделированной траектории движения транспортного средства в контрольной имитационной среде на основе данных о движении с использованием текущей версии алгоритма планирования движения на заданной итерации моделирования.
[0154] На шаге 706, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, сервер 235 способен запускать тестирование новой версии алгоритма 460 планирования движения, которая может использоваться процессором 110 электронного устройства 210 при формировании траекторий движения транспортного средства 220. В частности, на шаге 706 сервер 235 способен, используя новую версию (или, иными словами, текущую версию) алгоритма 460 планирования движения, формировать первую смоделированную траекторию для транспортного средства 220 на первой итерации 601 моделирования в контрольной имитационной среде 500. Как указано выше со ссылкой на фиг. 6, первая итерация 601 моделирования может быть такой же, как первая прошлая итерация 501 или может отличаться от нее.
[0155] В примере на фиг. 6 сервер 235 сформировал первую смоделированную траекторию для транспортного средства 220, включая первые кинематические характеристики, обеспечивающее движение транспортного средства 220 в первом направлении 510 на первой итерации 601 моделирования с большей скоростью, чем на первой прошлой итерации 501.
[0156] Следующим шагом в способе 700 является шаг 708.
Шаг 708: определение смоделированного поведения заданного внешнего объекта на основе смоделированной траектории.
[0157] На шаге 708 сервер 235, используя второй алгоритм 360 машинного обучения, способен определять первое смоделированное поведение объекта 504 на первой итерации 601 моделирования на основе первой смоделированной траектории движения транспортного средства 220. Как указано выше со ссылкой на фиг. 6, в связи с тем, что вероятность столкновения между объектом 504 и транспортным средством 220 при выборе первой смоделированной траектории сравнительно высока, сервер 235 способен определять первое смоделированное поведение объекта 504, которое, в частности, представляет собой нахождение в исходном положении в начале первой итерации 601 моделирования.
[0158] Следующим шагом в способе 700 является шаг 710.
Шаг 710: если контрольное поведение заданного внешнего объекта на заданной итерации моделирования отличается от смоделированного поведения этого внешнего объекта, формирование модифицированной контрольной имитационной среды путем замены контрольного поведения заданного внешнего объекта на его смоделированное поведение в контрольной имитационной среде на одной или нескольких последующих итерациях моделирования из множества итераций моделирования.
[0159] На шаге 710, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, сервер 235 способен определять, отличается ли первое смоделированное поведение объекта 504 от соответствующего прошлого поведения этого объекта на первой прошлой итерации 501.
[0160] В примерах, описанных выше и показанных на фиг. 5 и 6, первое смоделированное поведение объекта 504 на первой итерации 601 моделирования, представляющее собой нахождение в неизменном положении, отличается от прошлого поведения объекта 504 на первой прошлой итерации 501, которое заключается в движении во втором направлении 512. В результате, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, сервер 235 способен заменять прошлое поведение объекта 504 на его первое смоделированное поведение по меньшей мере на одной последующей итерации моделирования из множества итераций моделирования. Например, сервер 235 может назначить первое смоделированное поведение объекту 504 на второй итерации 603 моделирования.
[0161] Таким образом, за счет изменения поведения объекта 504 в контрольной имитационной среде 500, сервер 235 способен формировать экземпляр модифицированной имитационной среды 600.
[0162] Кроме того, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологи, сервер 235 способен заменять прошлое поведение объекта 504 на заданном количестве последующих итераций моделирования, например, на 1, 5 или 10 итерациях. На последующей итерации моделирования после заданного количества последующих итераций моделирования сервер 235 способен (1) уточнять смоделированное поведение объекта 504 и (2) сравнивать смоделированное поведение объекта 504 на последующей итерации моделирования с соответствующим прошлым поведением этого объекта на первой прошлой итерации 501.
[0163] Например, как указано выше со ссылкой на фиг. 6, на третьей итерации 605 моделирования сервер 235 способен формировать третью смоделированную траекторию для транспортного средства 220, включая третьи смоделированные кинематические характеристики, с которыми транспортное средство 220 движется в первом направлении 510 на прошлом участке 502 дороги. Затем сервер 235 способен (1) определять, используя второй алгоритм 360 машинного обучения, третье смоделированное поведение объекта 504 на основе третьей смоделированной траектории движения транспортного средства 220 и (2) решать, отличается ли третье смоделированное поведение объекта 504 на третьей итерации 605 моделирования от соответствующего прошлого поведения объекта 504 на первой прошлой итерации 501.
[0164] Например, поскольку на третьей итерации 605 моделирования второе направление 512 уже свободно от транспортного средства 220, сервер 235 может, используя второй алгоритм 360 машинного обучения, определить третье смоделированное поведение объекта 504, соответствующее прошлому поведению этого объекта на первой прошлой итерации 501, то есть его движению во втором направлении 512 с целью пересечения прошлого участка 502 дороги по пешеходному переходу.
[0165] Таким образом, сервер 235 способен продолжать моделирование движения транспортного средства 220 с использованием новой версии алгоритма 460 планирования движения на дальнейших итерациях моделирования из множества итераций моделирования до тех пор, пока не произойдет событие останова, например, дорожно-транспортное происшествие, связанное с транспортным средством 220.
[0166] Следующим шагом в способе 700 является шаг 712.
Шаг 712: использование экземпляра модифицированной контрольной имитационной среды из одной из множества итераций моделирования для определения траекторий движения транспортного средства с применением последующих версий алгоритма планирования движения.
[0167] При отсутствии события останова сервер 235 на шаге 712, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, способен сохранять экземпляр модифицированной имитационной среды 600 для тестирования последующих новых версий алгоритма 460 планирования движения.
[0168] Если в процессе тестирования сервером 235 новой версии алгоритма 460 планирования движения событие останова не наступает, сервер 235 дополнительно способен сохранять эту новую версию алгоритма 460 планирования движения с целью использования при формировании рабочих траекторий для транспортного средства 220 во время его функционирования.
[0169] Если событие останова наступает, сервер 235 способен прерывать моделирование движения транспортного средства 220 с использованием текущей новой версии алгоритма 460 планирования движения и исключать эту версию из дальнейшего рассмотрения при определении будущих траекторий движения транспортного средства 220.
[0170] На этом реализация способа 700 завершается.
[0171] Таким образом, некоторые не имеющие ограничительного характера варианты осуществления способа 700 позволяют безопасно моделировать движение транспортного средства 220 по вновь сформированным траекториям в реалистичной имитационной среде.
[0172] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Вышеприведенное описание включает в себя примеры реализации настоящей технологии и не носит ограничительного характера. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
[0173] Несмотря на то, что выше описаны варианты реализации с указанием конкретных шагов, выполняемых в определенном порядке, следует понимать, что некоторые из этих шагов могут быть объединены, разделены на части или переупорядочены без отступления от существа и объема настоящей технологии. Соответственно, порядок и группирование шагов не носят ограничительного характера для настоящей технологии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| Способ и система для определения траектории автономного транспортного средства | 2023 |
|
RU2821107C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ УХУДШЕНИЯ ЛИДАРНЫХ ДАННЫХ | 2021 |
|
RU2826476C1 |
| Способ и процессор для классификации точек на границе многоугольного участка | 2023 |
|
RU2836700C1 |
| Способ и устройство управления беспилотным автомобилем | 2021 |
|
RU2805539C2 |
| Способ управления роботизированным транспортным средством | 2021 |
|
RU2808469C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБУЧЕНИЯ АЛГОРИТМА МАШИННОГО ОБУЧЕНИЯ С ЦЕЛЬЮ ОБНАРУЖЕНИЯ ОБЪЕКТОВ НА РАССТОЯНИИ | 2020 |
|
RU2775817C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2021 |
|
RU2767826C1 |
| Способ и система для генерации опорного пути беспилотного автомобиля (SDC) | 2019 |
|
RU2746026C1 |
| Способ и система для прогнозирования маневра объекта | 2021 |
|
RU2778300C1 |
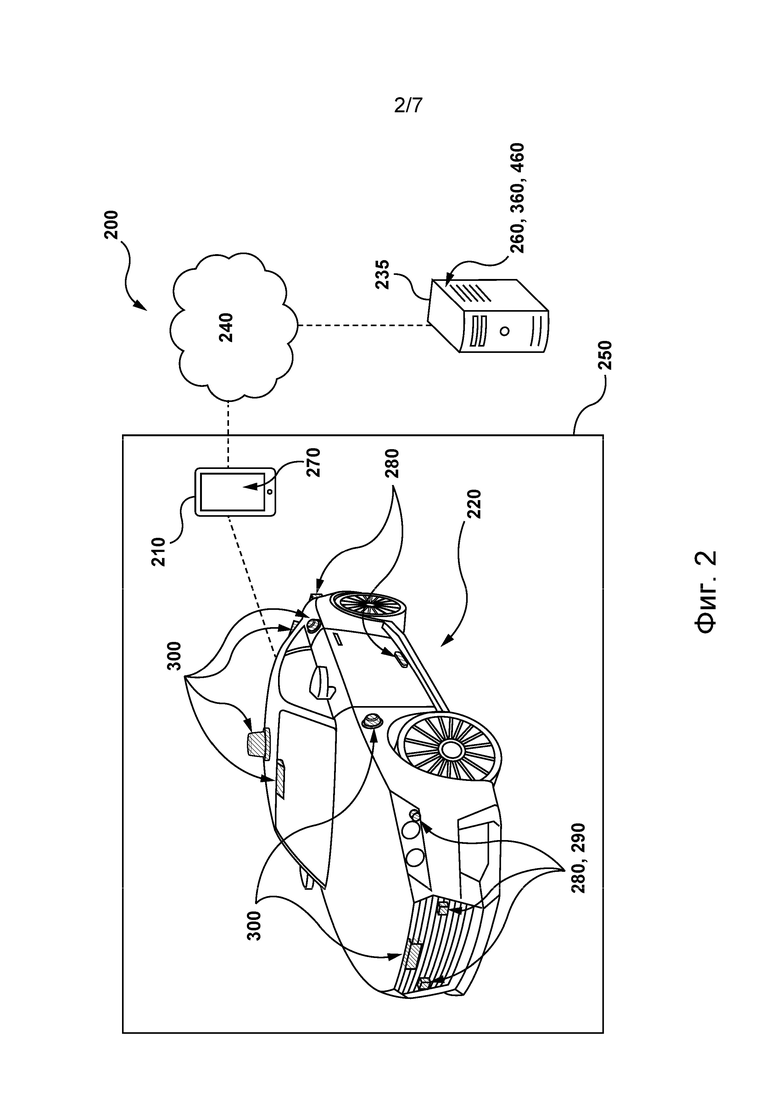
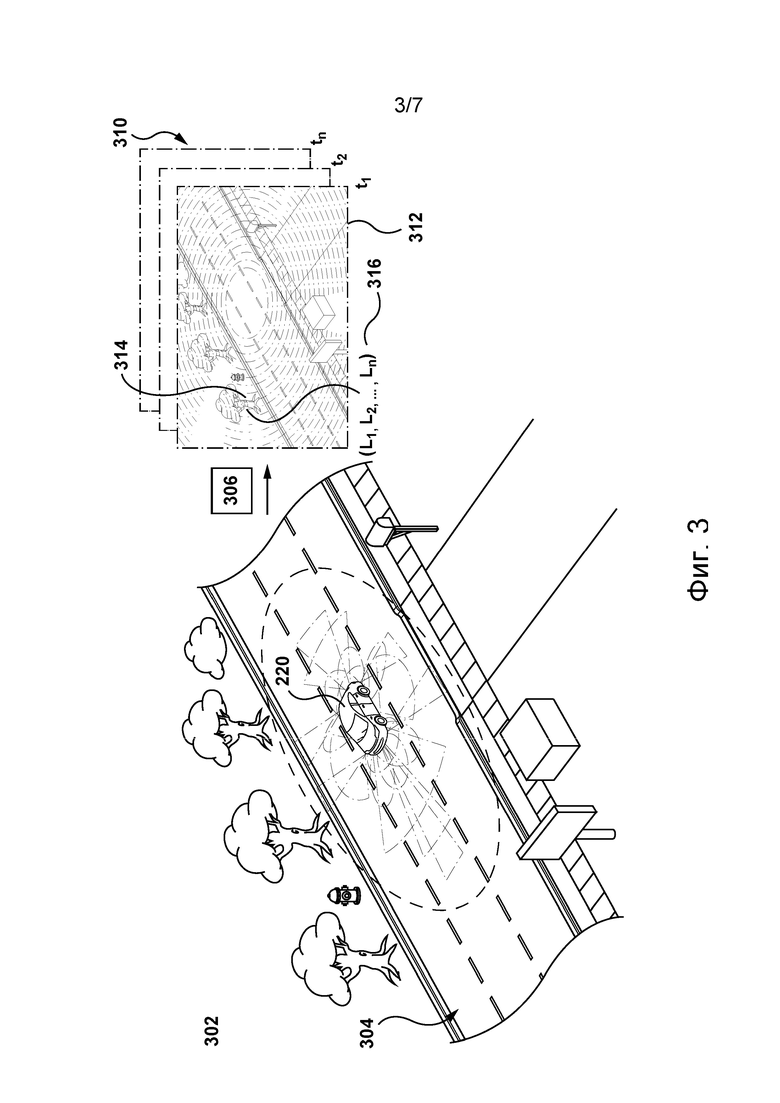
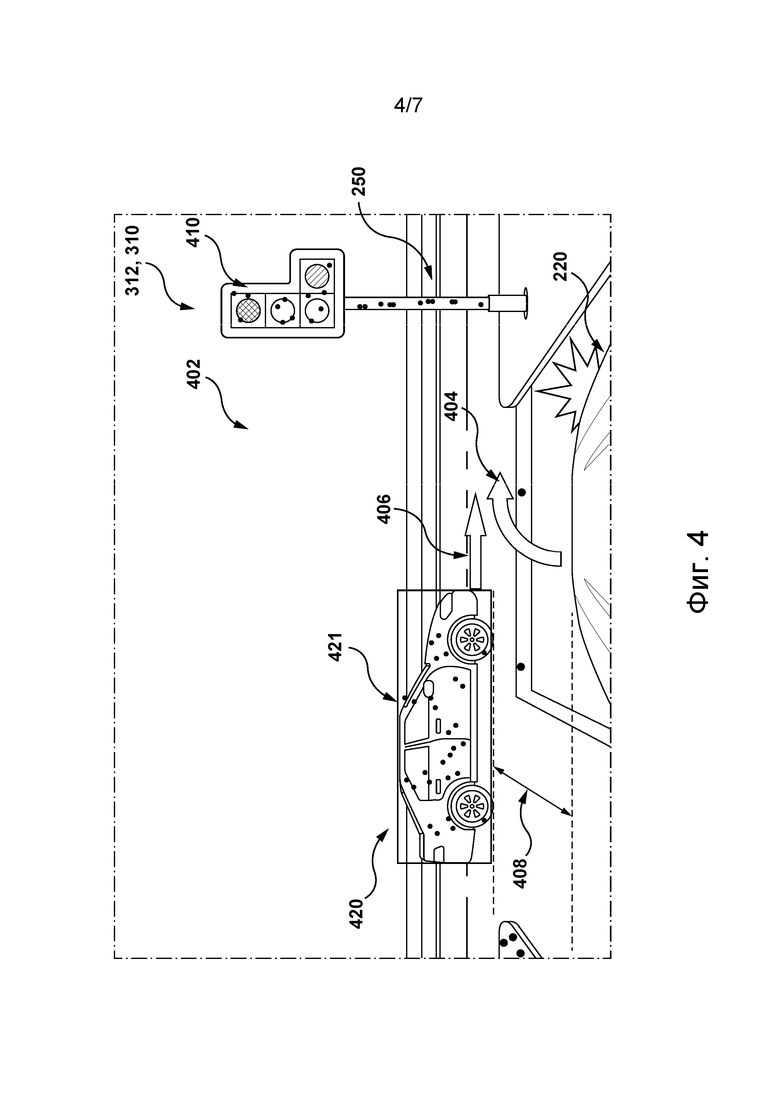
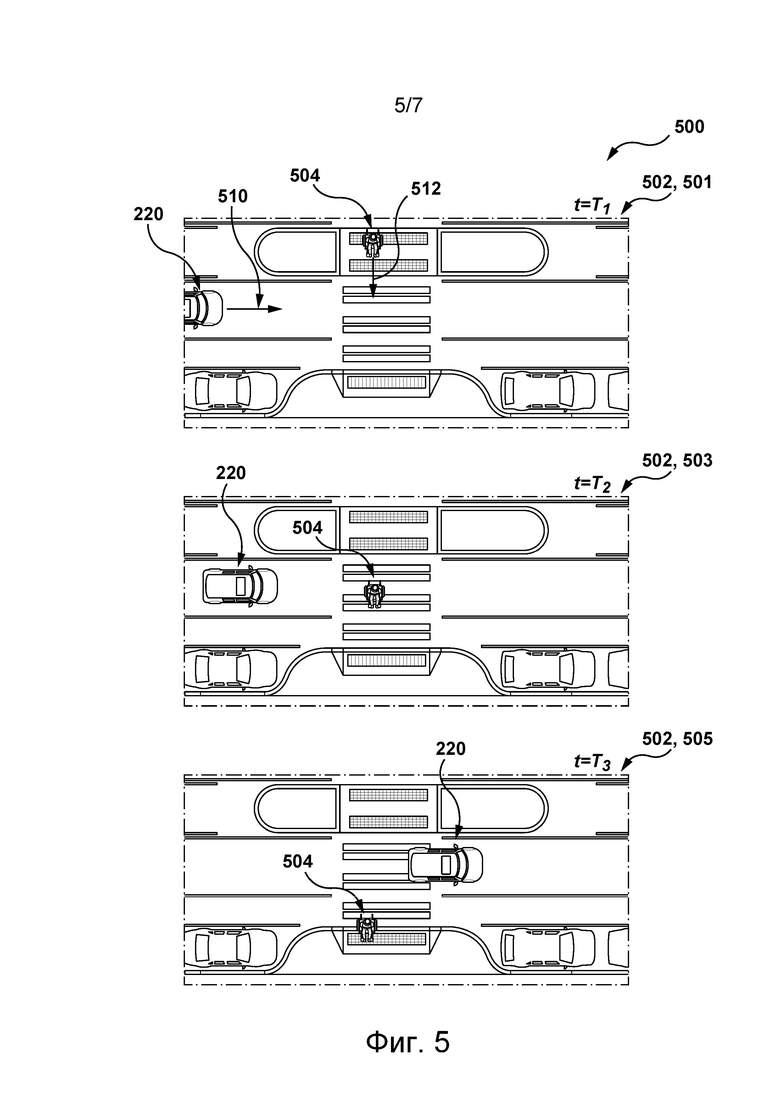
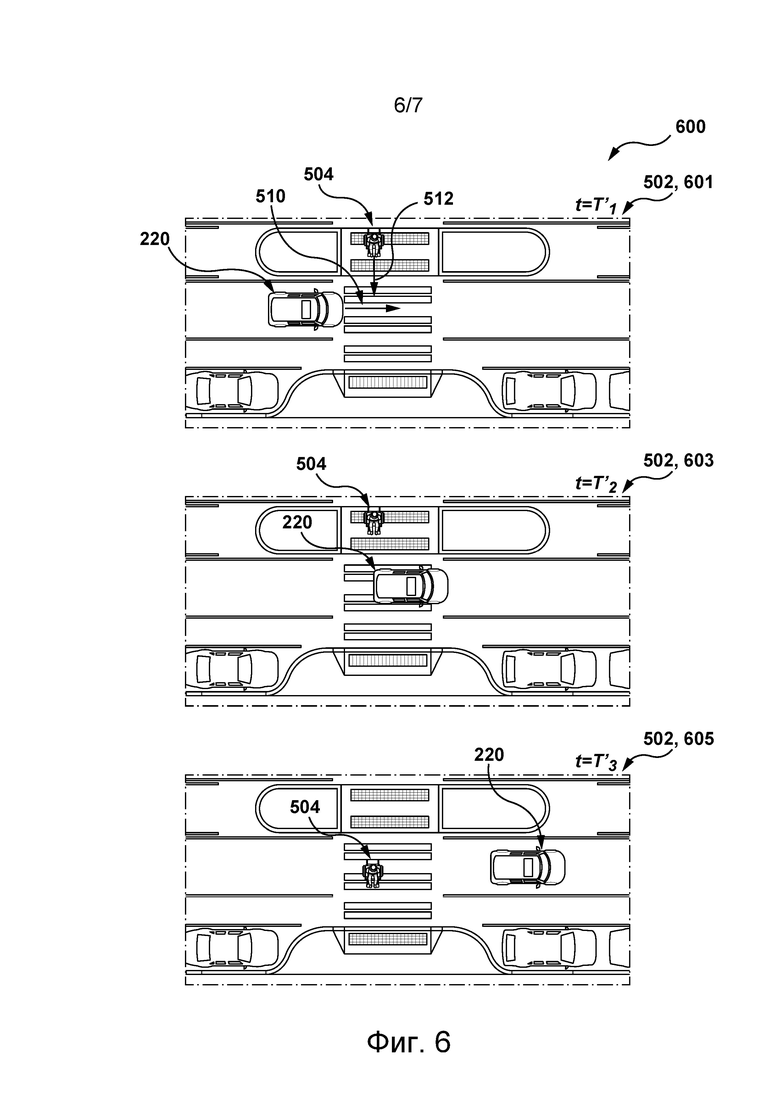
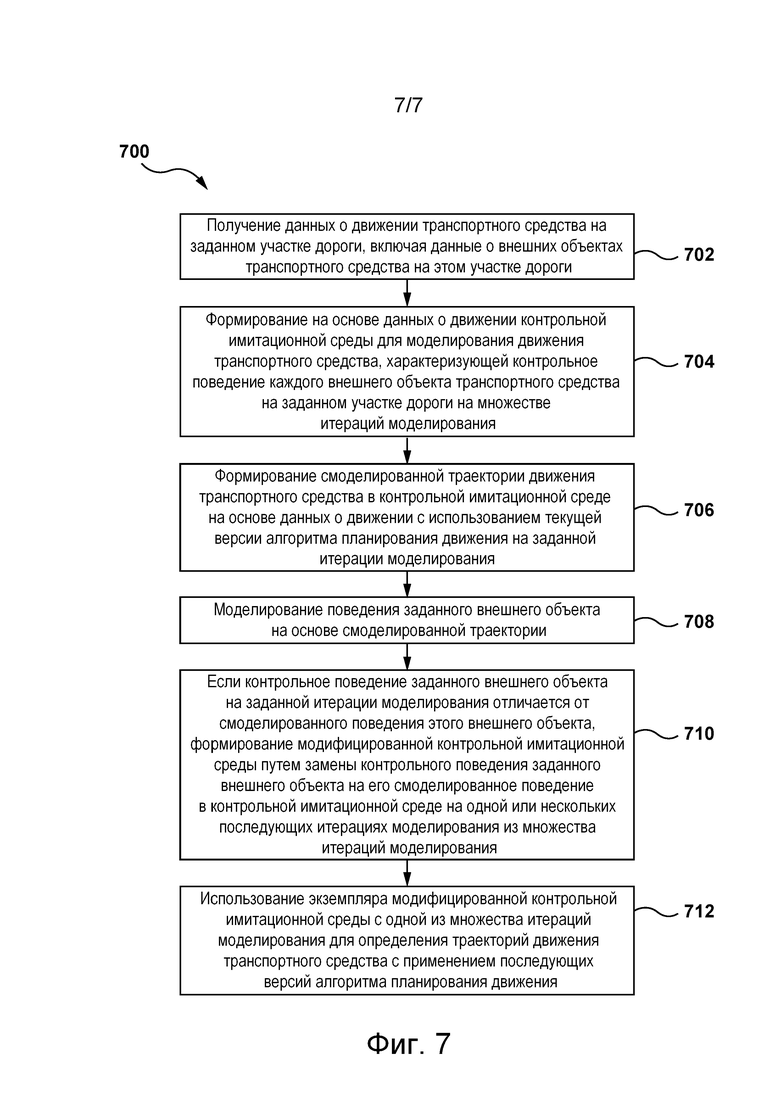
Группа изобретений относится к компьютерно-реализуемому способу определения траектории движения транспортного средства с использованием алгоритма планирования движения и серверу, его реализующему. Способ содержит: получение данных о движении транспортного средства и внешних объектах на заданном участке дороги; формирование на основе указанных данных о движении на множестве итераций моделирования; формирование смоделированной траектории движения транспортного средства с использованием текущей версии алгоритма планирования движения; определение смоделированного поведения заданного внешнего объекта на основе смоделированной траектории; формирование модифицированной контрольной имитационной среды путем замены контрольного поведения заданного внешнего объекта на его смоделированное поведение, если контрольное поведение отличается от смоделированного поведения этого внешнего объекта; и использование экземпляра модифицированной контрольной имитационной среды с применением последующих версий алгоритма планирования движения. Достигается прогнозирование траектории движения других участников дорожного движения. 2 н. и 14 з.п. ф-лы, 7 ил.
1. Компьютерно-реализуемый способ определения траектории движения транспортного средства с использованием алгоритма планирования движения, содержащий:
- получение данных о движении транспортного средства на заданном участке дороги, включая данные о внешних объектах транспортного средства на заданном участке дороги;
- формирование на основе данных о движении контрольной имитационной среды для моделирования движения транспортного средства, характеризующей контрольное поведение каждого внешнего объекта транспортного средства на заданном участке дороги на множестве итераций моделирования;
- выполнение следующих действий на заданной итерации моделирования из множества итераций моделирования:
- формирование смоделированной траектории движения транспортного средства на заданной итерации моделирования в контрольной имитационной среде на основе данных о движении с использованием текущей версии алгоритма планирования движения;
- определение смоделированного поведения заданного внешнего объекта на основе смоделированной траектории;
- формирование модифицированной контрольной имитационной среды путем замены в контрольной имитационной среде на одной или нескольких последующих итерациях моделирования из множества итераций моделирования контрольного поведения заданного внешнего объекта на его смоделированное поведение, если контрольное поведение заданного внешнего объекта на заданной итерации моделирования отличается от смоделированного поведения этого внешнего объекта; и
- использование экземпляра модифицированной контрольной имитационной среды из одной из множества итераций моделирования для определения траекторий движения транспортного средства с применением последующих версий алгоритма планирования движения.
2. Способ по п. 1, в котором формирование контрольной имитационной среды предусматривает определение класса объектов для каждого внешнего объекта на заданном участке дороги.
3. Способ по п. 2, в котором определение класса объектов для каждого внешнего объекта предусматривает запрос соответствующей метки у человека-оценщика.
4. Способ по п. 2, в котором данные о движении содержат ограничивающие рамки, представляющие внешние объекты, а определение класса объектов для каждого внешнего объекта предусматривает применение алгоритма машинного обучения, обученного определению класса объектов для заданного внешнего объекта на основе представляющей его ограничивающей рамки.
5. Способ по п. 1, в котором определение смоделированного поведения заданного внешнего объекта предусматривает применение алгоритма машинного обучения, обученного определению фактического поведения внешних объектов на основе текущей траектории движения транспортного средства.
6. Способ по п. 1, в котором замена предусматривает замену до тех пор, пока на последующей итерации моделирования из множества итераций моделирования смоделированное поведение заданного окружающего объекта не окажется соответствующим его контрольному поведению на заданной итерации моделирования.
7. Способ по п. 1, который при наступлении события останова на заданной итерации моделирования дополнительно предусматривает:
- прерывание моделирования движения транспортного средства без перехода к последующей итерации моделирования; и
- исключение текущей версии алгоритма планирования движения из дальнейшего рассмотрения при определении траекторий движения транспортного средства.
8. Способ по п. 7, в котором событие останова включает в себя возникновение на заданной итерации моделирования дорожно-транспортного происшествия, связанного с транспортным средством.
9. Сервер для определения траектории движения транспортного средства с использованием алгоритма планирования движения, содержащий по меньшей мере один процессор и по меньшей мере одну физическую машиночитаемую память, хранящую исполняемые команды, при исполнении которых по меньшей мере одним процессором сервер сконфигурирован:
- получать данные о движении транспортного средства на заданном участке дороги, включая данные о внешних объектах транспортного средства на заданном участке дороги;
- формировать на основе данных о движении контрольную имитационную среду для моделирования движения транспортного средства, характеризующую контрольное поведение каждого внешнего объекта транспортного средства на заданном участке дороги на множестве итераций моделирования;
- выполнять следующие действия на заданной итерации моделирования из множества итераций моделирования:
- формирование смоделированной траектории движения транспортного средства на заданной итерации моделирования в контрольной имитационной среде на основе данных о движении с использованием текущей версии алгоритма планирования движения;
- определение смоделированного поведения заданного внешнего объекта на основе смоделированной траектории;
- формирование модифицированной контрольной имитационной среды путем замены в контрольной имитационной среде контрольного поведения заданного внешнего объекта на его смоделированное поведение на одной или нескольких последующих итерациях моделирования из множества итераций моделирования, если контрольное поведение заданного внешнего объекта на заданной итерации моделирования отличается от смоделированного поведения этого внешнего объекта; и
- использовать экземпляр модифицированной контрольной имитационной среды из одной из множества итераций моделирования для определения траекторий движения транспортного средства с применением последующих версий алгоритма планирования движения.
10. Сервер по п. 9, в котором при формировании контрольной имитационной среды по меньшей мере один процессор обеспечивает определение сервером класса объектов для каждого внешнего объекта на заданном участке дороги.
11. Сервер по п. 10, в котором для определения класса объектов для каждого внешнего объекта по меньшей мере один процессор обеспечивает запрос сервером соответствующей метки у человека-оценщика.
12. Сервер по п. 10, в котором данные о движении содержат ограничивающие рамки, представляющие внешние объекты, а для определения класса объектов для каждого внешнего объекта по меньшей мере один процессор обеспечивает применение сервером алгоритма машинного обучения, обученного определению класса объектов для заданного внешнего объекта на основе представляющей его ограничивающей рамки.
13. Сервер по п. 9, в котором для определения смоделированного поведения заданного внешнего объекта по меньшей мере один процессор обеспечивает применение сервером алгоритма машинного обучения, обученного определению фактического поведения внешних объектов на основе текущей траектории движения транспортного средства.
14. Сервер по п. 9, в котором замена предусматривает замену до тех пор, пока на последующей итерации моделирования из множества итераций моделирования смоделированное поведение заданного окружающего объекта не окажется соответствующим его контрольному поведению на заданной итерации моделирования.
15. Сервер по п. 9, в котором при наступлении события останова на заданной итерации моделирования по меньшей мере один процессор дополнительно обеспечивает выполнение сервером:
- прерывания моделирования движения транспортного средства без перехода к последующей итерации моделирования; и
- исключения текущей версии алгоритма планирования движения из дальнейшего рассмотрения при определении траекторий движения транспортного средства.
16. Сервер по п. 15, в котором событие останова включает в себя возникновение на заданной итерации моделирования дорожно-транспортного происшествия, связанного с транспортным средством.
| US 2022340172 A1, 27.10.2022 | |||
| DE 102018222002 A1, 18.06.2020 | |||
| SE 1850271 A1, 13.09.2019 | |||
| DE 102018216044 A1, 26.03.2020 | |||
| JP 2021187345 A, 13.12.2021. |

