Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству связи и способу связи.
Уровень техники
В последнее время обсуждается техническая задача по дальнейшему совершенствованию функционирования сотовой системы беспроводной связи четвертого поколения (4G). В 4G уделяется особое внимание использованию релейной технологии, агрегации несущих частот и технологии Скоординированной Многоточечной передачи и приема (СоМР).
Релейная технология является технологией, с помощью которой ретрансляционный узел ретранслирует связь между базовой станцией (например, базовой станцией макросоты) и оконечным устройством связи и играет важную роль в повышении пропускной способности на границе соты базовой станции. Кроме того, агрегация несущих частот является технологией, которая расширяет возможность использования полосы частот (например, 20 МГц·5=100 МГц) и обеспечивает повышение максимальной пропускной способности за счет коллективной обработки множества частотных диапазонов, которые имеют полосу пропускания в 20 МГц. Более того, СоМР является технологией, с помощью которой множество базовых станций, называемое набором СоМР, устанавливают взаимодействие для обмена данными с оконечным устройством связи, и может расширить покрытие, которое может поддерживать связь с высокой скоростью передачи данных. СоМР раскрыто в Патентном Документе 1, например.
Более того, при использовании 4G обсуждается вопрос улучшения качества покрытия с использованием базовых станций, помимо macro-eNodeBs, например посредством эксплуатации Home eNodeBs (фемтосотовых базовых станций, микробазовых станций для мобильных телефонов), дистанционных радиоузлов (RRHs) и pico-eNodeBs.
Перечень ссылок 1
Патентная литература
PTL 1: Выложенная заявка на патент Японии №2011-091785
Раскрытие изобретения
Техническая задача
Таким образом, в гетерогенной среде, в которой различные виды базовых станций, такие как RRHs, макро eNodeBs и т.п. рассредоточены, предполагается, что даже набор СоМР может динамически изменяться. Тем не менее, способы определения набора СоМР в гетерогенной среде недостаточно обсуждены.
Соответственно, настоящее изобретение предлагает новое и усовершенствованное устройство связи, способ связи, программу и систему связи для надлежащего определения комбинации базовых станций, используемых для связи с оконечным устройством связи.
Решение технической задачи
В соответствии с настоящим изобретением устройство связи включает в себя приемник, который принимает информацию, указывающую период времени, в котором заданный сигнал передается передающей базовой станцией из множества базовых станций, имеющих одинаковый ID соты. Приемник определяет, что заданный сигнал был передан передающей базовой станцией, на основании согласования по времени, зафиксированного приемником.
Более того, согласно настоящему изобретению дополнительно обеспечивается способ связи, содержащий этапы, на которых принимают по беспроводной связи принимающим оборудованием пользователя, информацию, указывающую момент времени, в котором заданный сигнал передается передающей базовой станцией от множества базовых станций, имеющих одинаковый ID соты;
определяют, что заданный сигнал был передан передающей базовой станцией, на основании согласования по времени, зафиксированного упомянутым принимающим оборудованием пользователя.
Более того, согласно настоящему изобретению дополнительно обеспечивается устройство управления связью и способ, использующий блок установки для установки момента времени, при котором заданный сигнал передается только некоторыми базовыми станциями из множества базовых станций, имеющих один и тот же ID соты, так что оборудование пользователя выполнено с возможностью определения того, что заданный сигнал был передан передающей базовой станцией, на основании согласования по времени, зафиксированного упомянутым принимающим оборудованием пользователя.
Полезные эффекты изобретения
В соответствии с настоящим изобретением, как описано выше, возможно соответствующим образом определить комбинацию базовых станций, используемых для установки связи с оконечным устройством связи.
Краткое описание чертежей
Фиг.1 является пояснительной схемой, иллюстрирующей конфигурацию системы связи в соответствии с вариантом осуществления настоящего изобретения.
Фиг.2 является пояснительной схемой, иллюстрирующей формат фрейма 4G.
Фиг.3 является пояснительной схемой, иллюстрирующей пример одного из вариантов осуществления СоМР.
Фиг.4 представляет собой пояснительную схему, иллюстрирующую другой пример варианта осуществления СоМР.
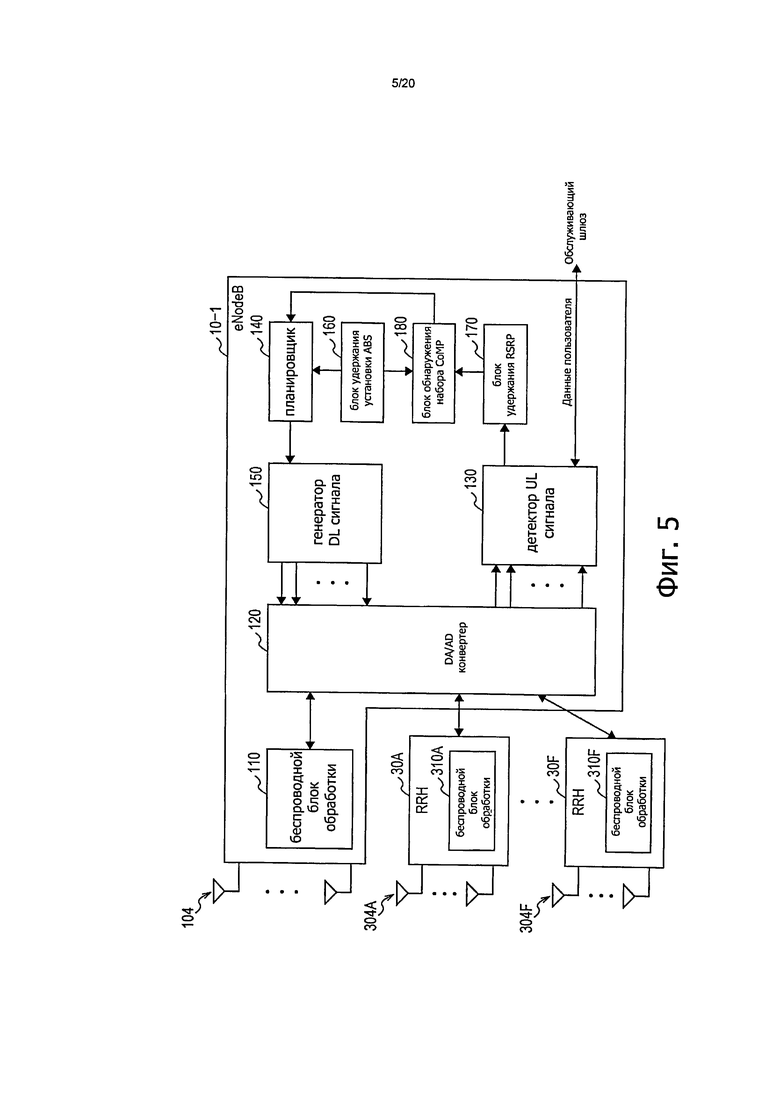
Фиг.5 представляет собой функциональную блок-схему, иллюстрирующую конфигурации eNodeB и RRH в соответствии с первым вариантом осуществления.
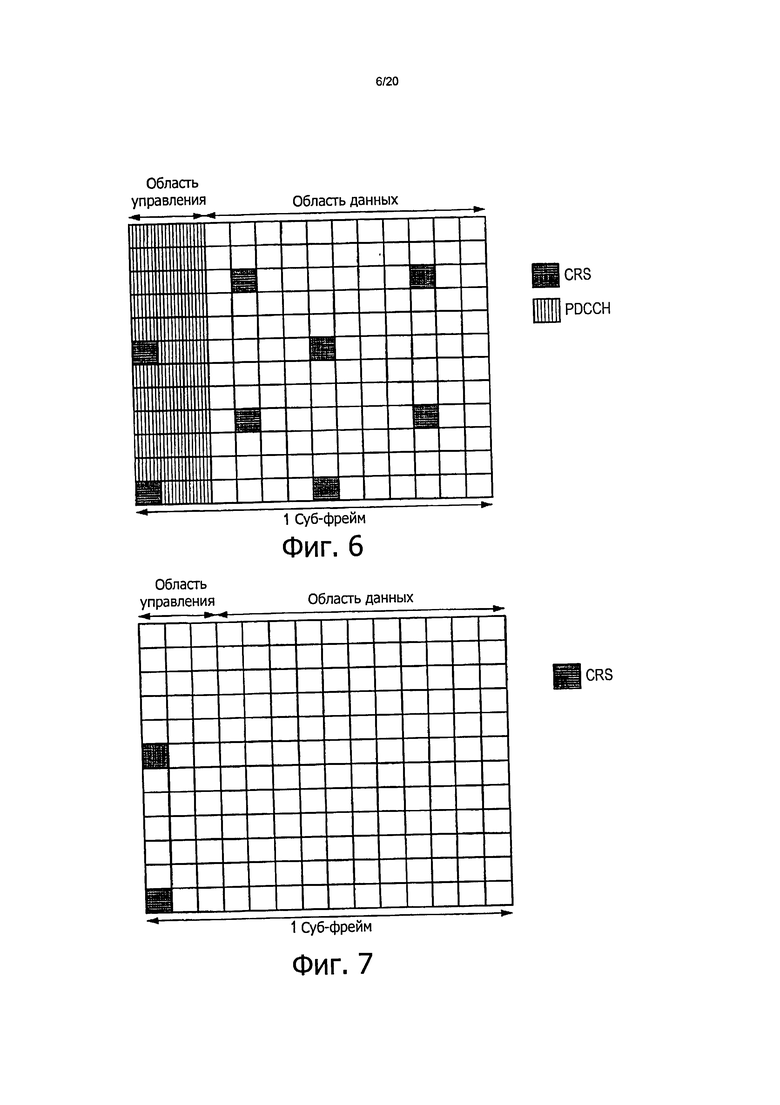
Фиг.6 является пояснительной схемой, иллюстрирующей субфрейм, который установлен как ABS.
Фиг.7 является пояснительной схемой, иллюстрирующей субфреймы, которые устанавливаются как ABS и мультимедийную широковещательную многоадресную одночастотную сеть (MBSFN).
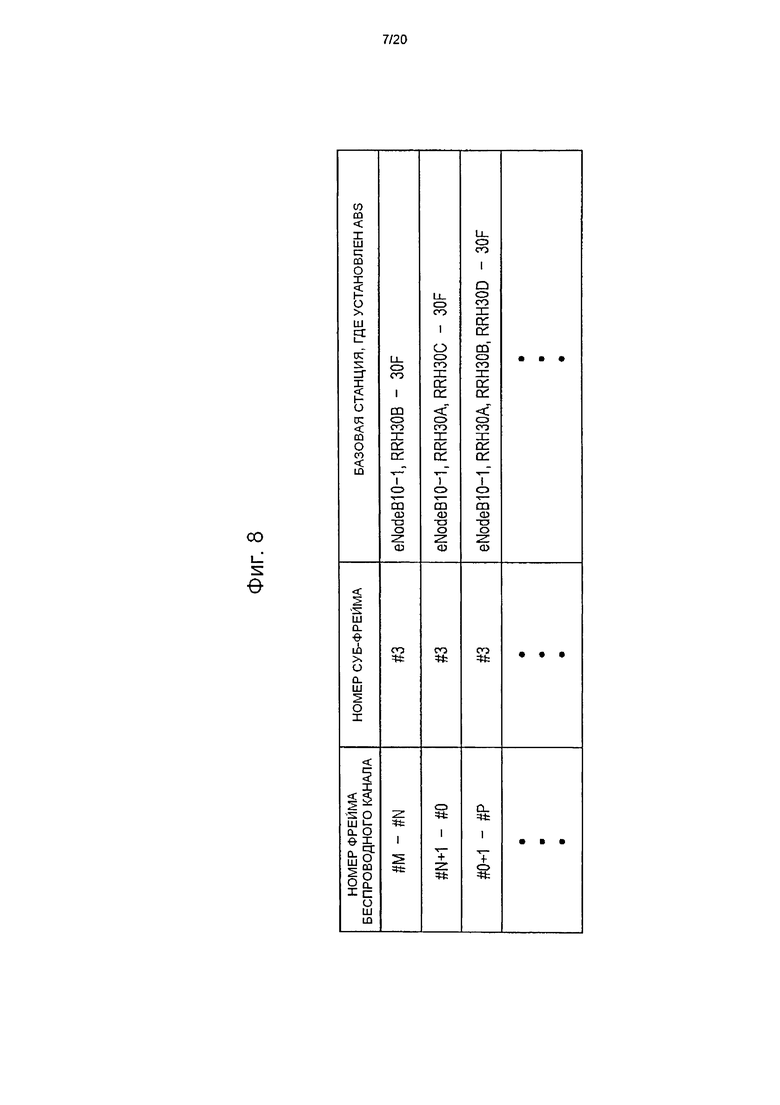
Фиг.8 является пояснительной схемой, иллюстрирующей пример установки ABS.
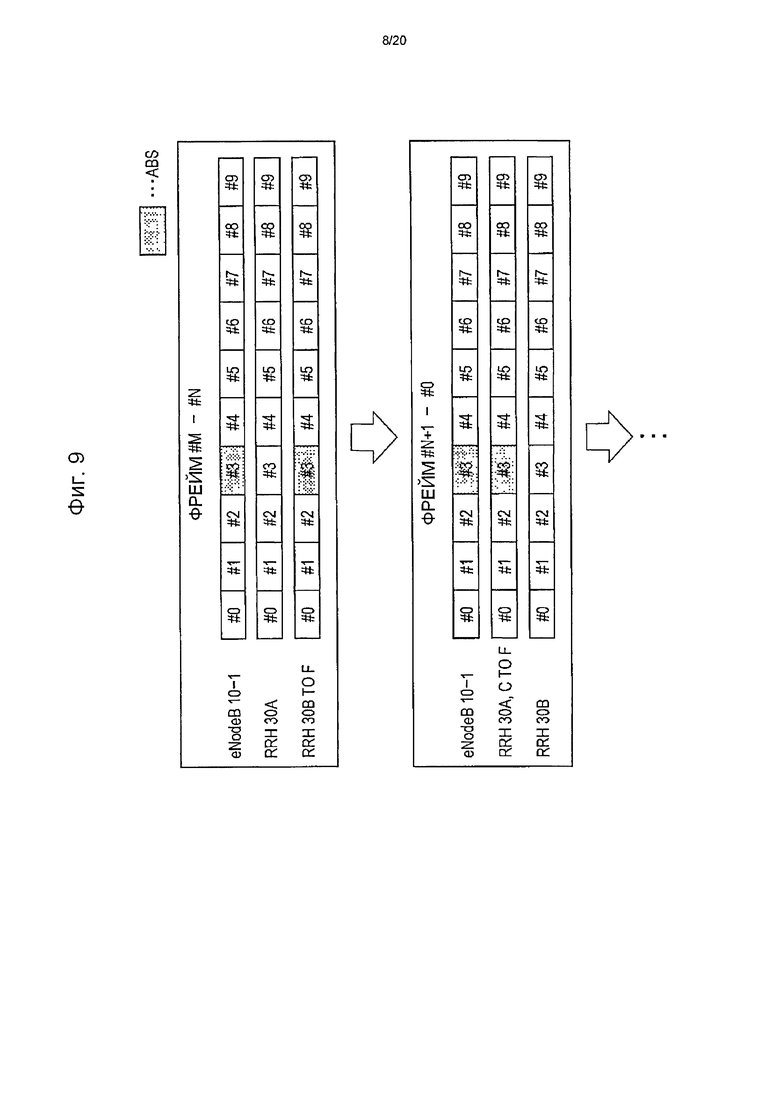
Фиг.9 является пояснительной схемой, иллюстрирующей другой пример установки ABS.
Фиг.10 является пояснительной схемой, иллюстрирующей пример установки ABS, когда базовые станции сгруппированы.
Фиг.11 является пояснительной схемой, иллюстрирующей пример информации, которая хранится в RSRP блоке удержания.
Фиг.12 является функциональной блок-схемой, иллюстрирующей конфигурацию UE согласно первому варианту осуществления.
Фиг.13 является блок-схемой алгоритма, иллюстрирующей работу системы связи.
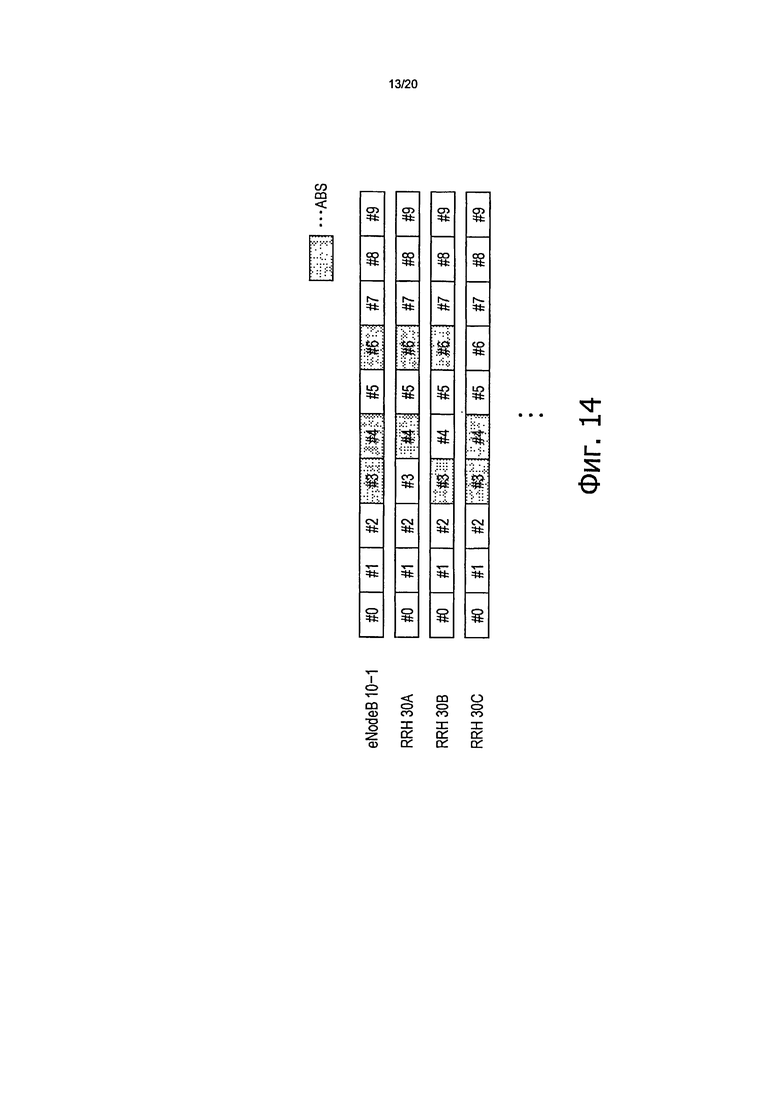
Фиг.14 представляет собой пояснительную таблицу, иллюстрирующую изменение способа установки ABS.
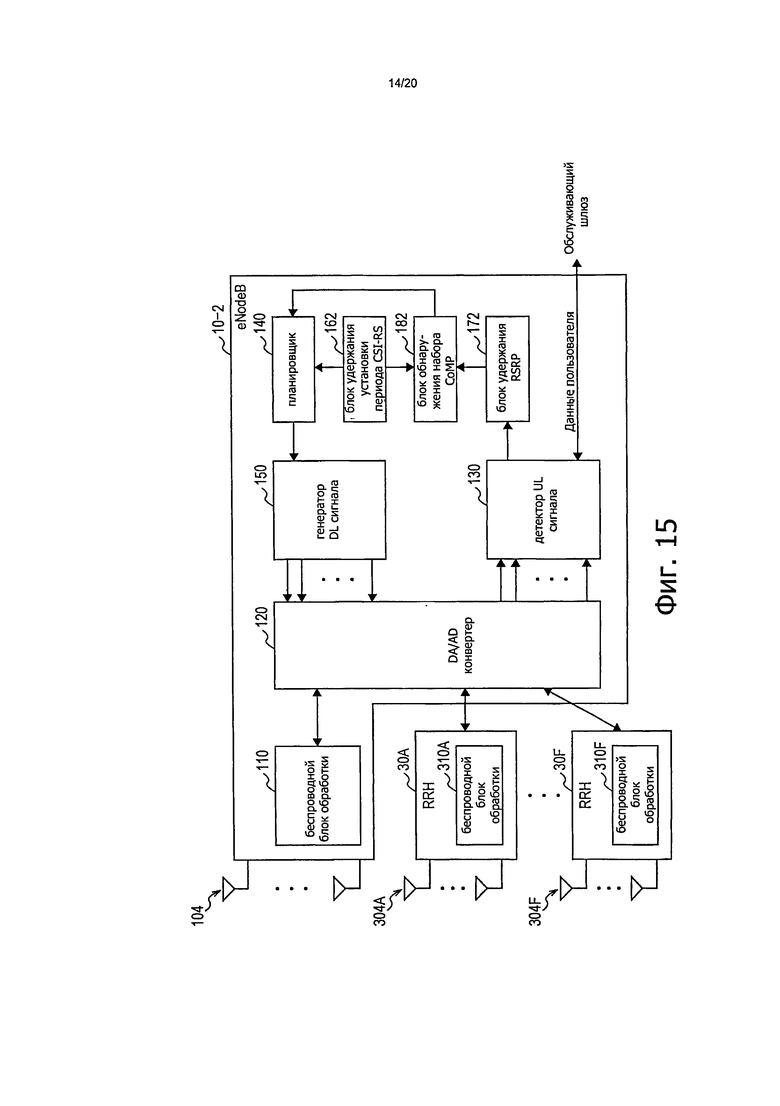
Фиг.15 является функциональной блок-схемой, показывающей конфигурацию eNodeB и RRH в соответствии со вторым вариантом осуществления настоящего изобретения.
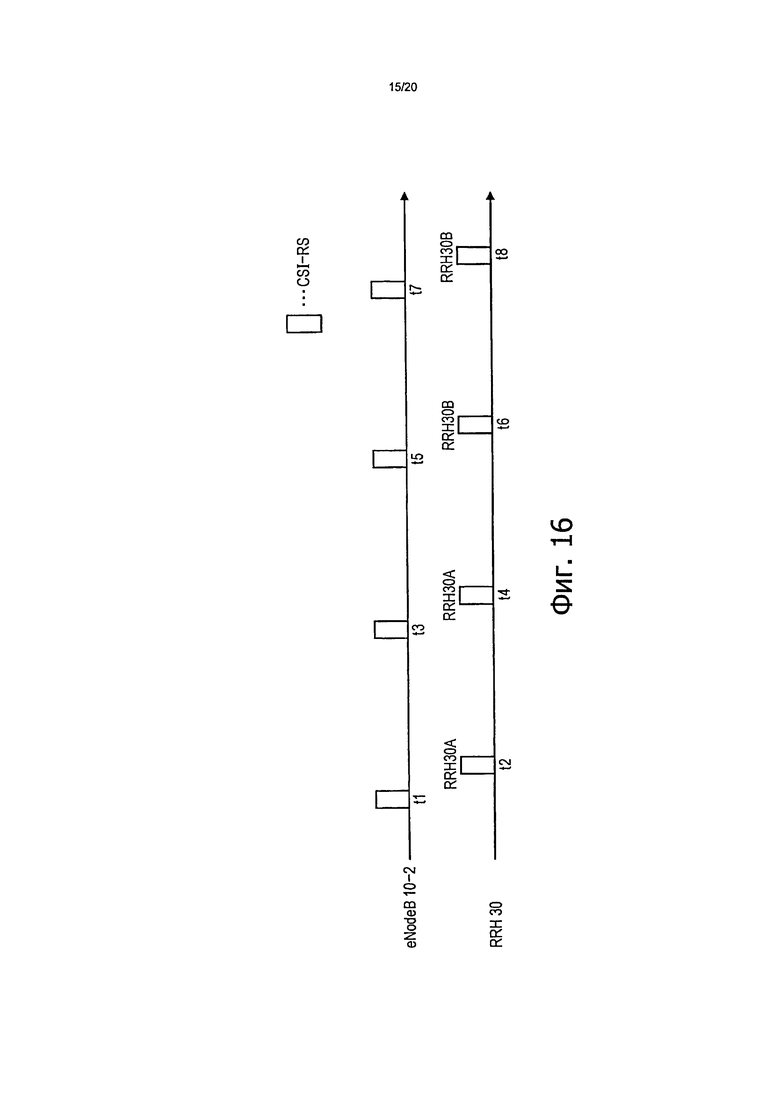
Фиг.16 представляет собой пояснительную схему, иллюстрирующую конкретный пример периода вставки CSI-RS.
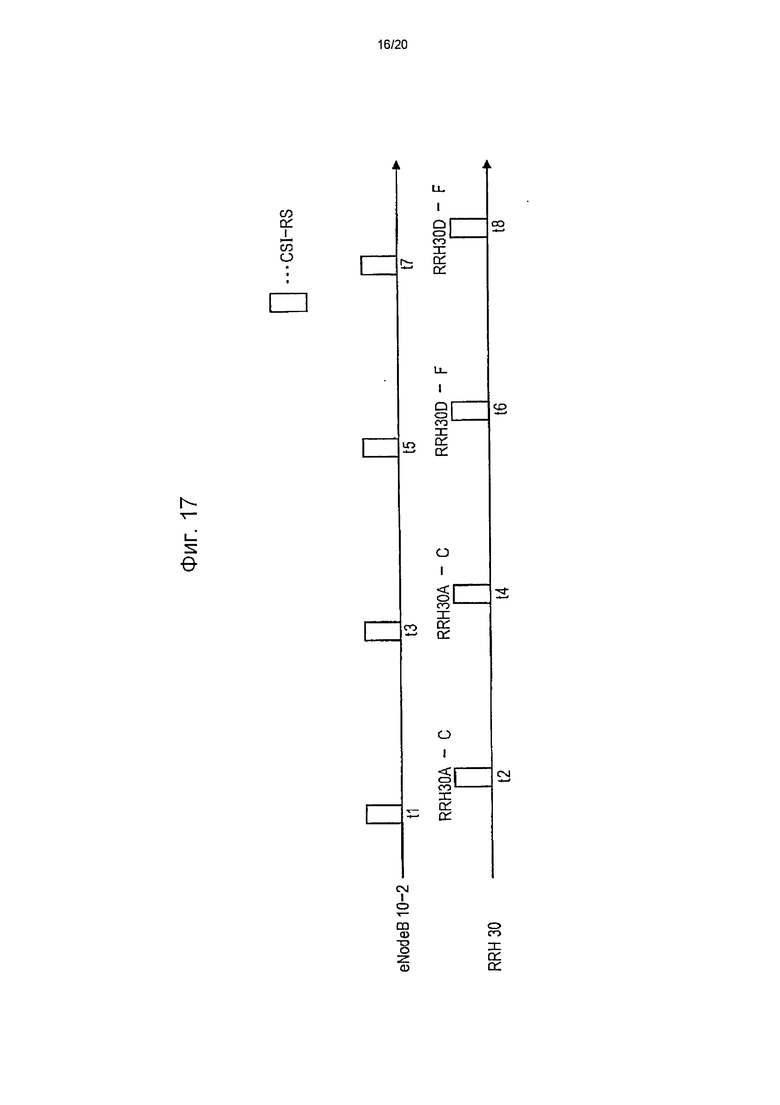
Фиг.17 является пояснительной схемой, иллюстрирующей пример установки периода вставки CSI-RS, когда RRHs сгруппированы.
Фиг.18 является функциональной блок-схемой, иллюстрирующей конфигурацию UE согласно второму варианту осуществления.
Фиг.19 является блок-схемой алгоритма, иллюстрирующей работу системы связи.
Фиг.20 представляет собой пояснительную схему, показывающую модификацию периода вставки CSI-RS.
Фиг.21 представляет собой пояснительную схему, иллюстрирующую CSI-RS + Enhanced_Muting согласно второму варианту модификации.
Осуществление изобретения
Предпочтительные варианты осуществления настоящего изобретения описаны ниже подробно со ссылкой на прилагаемые чертежи. В настоящем описании и на чертежах компоненты, имеющие, по существу, те же самые функциональные конфигурации, обозначены теми же ссылочными буквами или номерами и, таким образом, избыточное описание таких компонентов не осуществляется.
Кроме того, в данном описании и на чертежах множество компонентов, имеющих, по существу, те же самые функциональные конфигурации, могут иногда выделяться с использованием различных буквенных обозначений, добавленных к последней части той же буквенной ссылочной позиции. Например, множество компонентов, имеющих по существу, ту же самую функциональную конфигурацию, может быть выделено как RRHs 30А, 30В и 30С, если необходимо. Однако когда множество компонентов, имеющих по существу, ту же самую функциональную конфигурацию, не обязательно должны отличаться друг от друга, такие компоненты могут быть обозначены только одной буквенной ссылочной позицией. Например, когда RRHs 30А, 30В и 30С не должны быть обязательно выделены друг от друга, то они обозначаются только как RRHs 30.
Более того, настоящее изобретение описано в следующем порядке.
1. Общая конфигурация системы связи
2. Первый вариант осуществления
2-1. Конфигурация базовой станции
2-2. Конфигурация UE
2-3. Функционирование системы связи
2-4. Модификация
3. Второй вариант осуществления
3-1. Описание CSI-RS
3-2. Конфигурация базовой станции
3-3. Конфигурация UE
3-4. Функционирование системы связи
3-5. Первый вариант модификации
3-6. Второй вариант модификации
4. Заключение
1. Общая конфигурация системы связи
Технология в соответствии с настоящим изобретением может быть реализована различными способами, как подробно описано, например, в разделах с «2. Первый вариант осуществления» по «3. Второй вариант осуществления». Более того, устройство связи (UE 20) в соответствии с каждым из вариантов осуществления включает в себя:
A. Приемник (антенную группу 204 и тому подобное), который принимает информацию, указывающую момент времени, в который конкретный сигнал передается только некоторыми базовыми станциями из множества базовых станций, имеющих одинаковый ID соты;
B. Измерительный блок (детектор 230 DL сигнала), который измеряет мощность принимаемого сигнала в момент времени; и
C. Передатчик (антенная группа 204 и тому подобное), который передает сигнал, показывающий результат измерения, полученный с помощью измерительного блока.
Здесь и далее, прежде всего, описываются основные компоненты, которые являются общими в соответствующих вариантах осуществления, со ссылкой на фиг.1 и 2.
Общая конфигурация системы связи
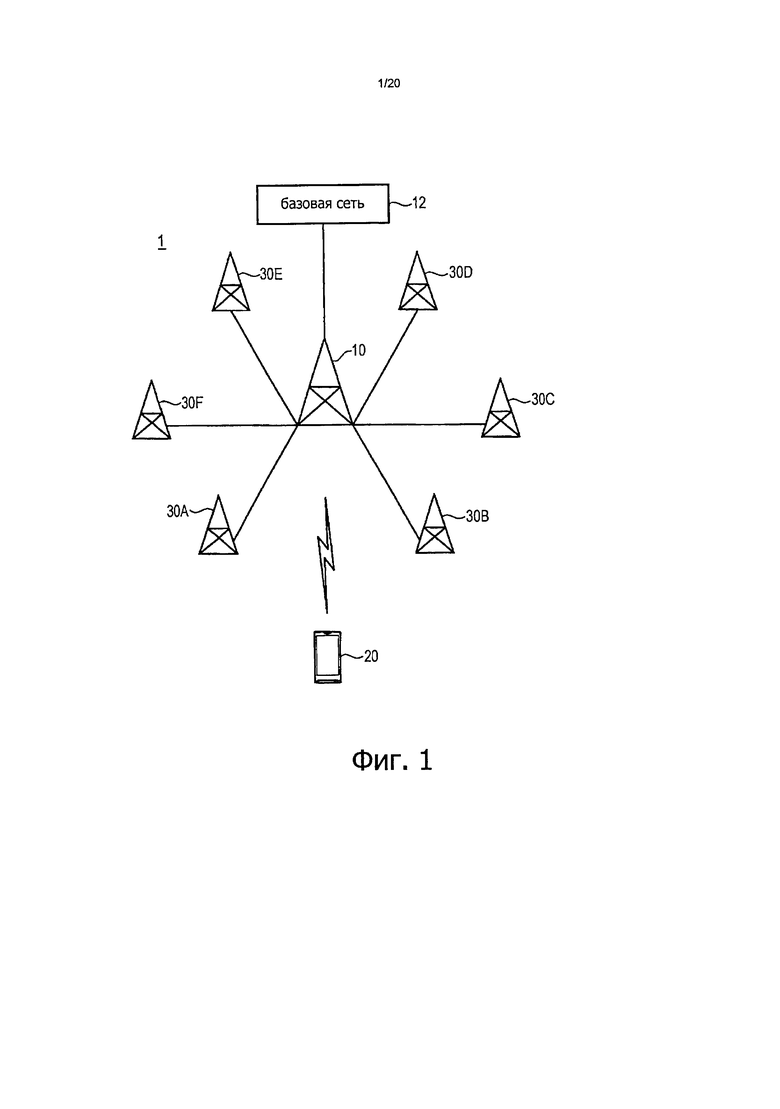
Фиг.1 является пояснительной схемой, иллюстрирующей конфигурацию системы 1 связи в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг.1, система 1 связи в соответствии с вариантом осуществления настоящего изобретения включает в себя eNodeB 10, базовую сеть 12, оборудование (UE) 20 пользователя и множество RRHs 30А-30F.
UE 20 представляет собой устройство связи, которое выполняет обработку принимаемого сигнала для нисходящего канала связи блока ресурсов, который используется базовой станцией, такой как eNodeB 10, и выполняет процесс передачи по восходящему каналу связи блока ресурсов.
UE 20 может быть смартфоном, как показано на фиг.1, например, или может быть устройством обработки информации, таким как персональный компьютер (PC), устройством обработки видео для домашнего использования (DVD рекордер, VCR и т.п.), персональные цифровые помощники (PDA), игровой приставкой для семейного использования или бытовым электрическим прибором. Кроме того, UE 20 может быть устройством мобильной связи, таким как мобильный телефон, персональный миниатюрный радиотелефон (PHS), портативный музыкальный плеер, портативное устройство обработки видео или портативная игровая приставка.
eNodeB 10 представляет собой базовую радиостанцию, которая устанавливает связь с UE 20, находящимся в зоне покрытия (в данном описании eNodeB 10 обозначает Macro_eNodeB, если специально не указано иначе). Более того, eNodeB 10 соединяется с множеством RRHs 30A-30F через канал связи, такой как оптическое волокно, например. Таким образом, eNodeB 10 может передавать сигнал по нисходящему каналу связи в RRH 30 через канал связи и инициировать работу RRH 30 на передачу сигнала по нисходящему каналу связи в UE 20 или может принимать сигнал, переданный по восходящему каналу связи, который был принят RRH 30 из UE 20, из RRH 30. Кроме того, возможно также для eNodeB 10 устанавливать связь с СоМР, взаимодействуя с множеством RRHs 30A-30F. Подробное описание взаимодействия с СоМР будет приведено ниже. Хотя это и не показано на фиг.1, многие NodeBs 10 на самом деле подключены к базовой сети 12.
Базовая сеть является сетью провайдера услуг, включающая в себя коды управления, такие как Узел Управления Мобильностью (ММЕ), и обслуживающий шлюз (GW). ММЕ представляет собой устройство, которое устанавливает сеанс для передачи данных и управляет разрывом и передачей обслуживания. Данный ММЕ подключается к eNodeB 10 через интерфейс, называемый Х2. S-GW является устройством, которое маршрутизирует и направляет данные пользователя.
RRH 30 является базовой радиостанцией, которая осуществляет связь с UE 20 с использованием относительно небольшой мощности по сравнению с eNodeB 10. В частности, RRH 30 подключается к eNodeB 10 через канал связи, такой как оптическое волокно, и передает сигнал по нисходящему каналу связи, который был получен от eNodeB 10 через данный канал связи, в UE 20. Кроме того, RRH 30 передает сигнал по восходящему каналу связи, который был принят от UE 20, в eNodeB 10 через канал связи. Система 1 связи в соответствии с настоящим изобретением включает в себя RRHs 30, так что покрытие и качество связи в непосредственной близости от границы соты могут быть улучшены.
Конфигурация фрейма
Далее описывается радиофрейм, распределенный между UE 20 и базовой станцией, такой как eNodeB 10.
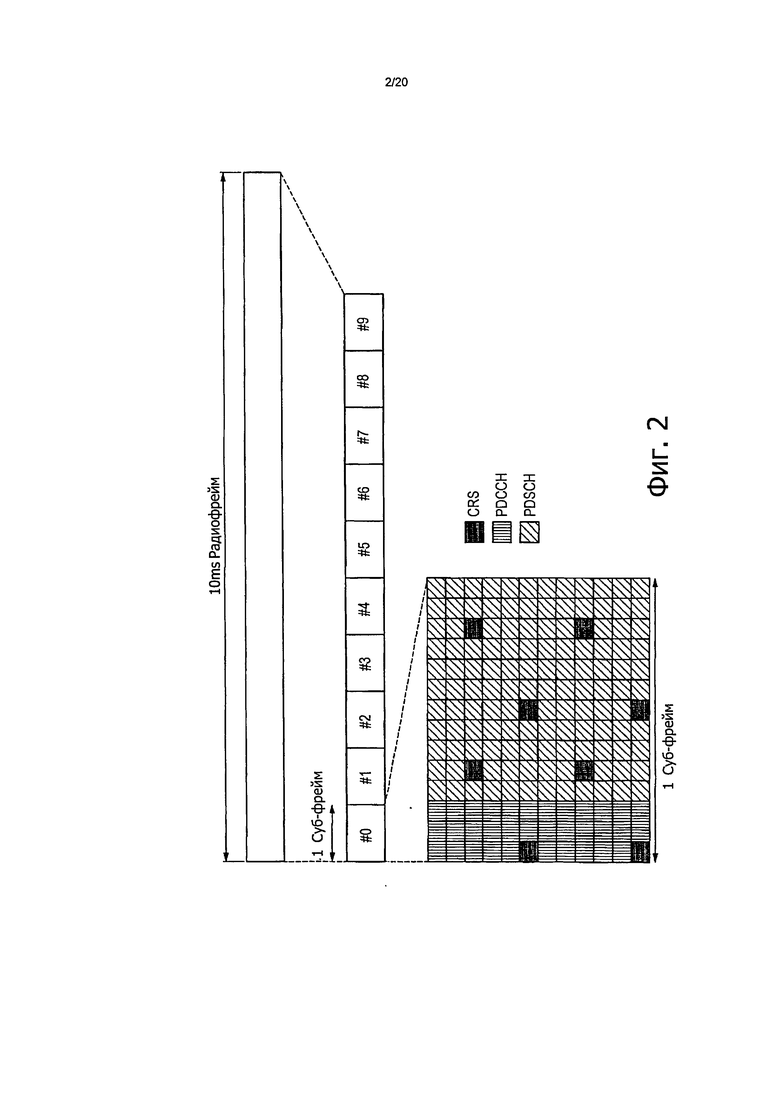
Фиг.2 представляет собой пояснительную схему, иллюстрирующую формат фрейма 4G. Как показано на фиг.2, радиофрейм длительностью 10 мс, который включает в себя десять субфреймов от # 0 до # 9, длительность каждого из которых составляет 1 мс. Каждый субфрейм имеет один блок ресурсов, включающий в себя двенадцать поднесущих/четырнадцать символов ортогонального частотного разделения каналов (OFDM) и планирование, заданное в блоках блока ресурсов. Более того, один OFDM символ соответствует блоку, используемому в системе связи системы OFDM модуляции, и является блоком вывода данных, которые обрабатываются в ходе однократного быстрого преобразования Фурье (FFT).
Кроме того, как показано на фиг.2, каждый субфрейм включает в себя область управления и область данных. Область управления включает в себя сначала от одного до трех OFDM-символов (фиг.2 показывает пример, в котором область управления включает в себя три OFDM-символа) и используется для передачи сигнала управления, которая называется нисходящим физическим каналом управления (PDCCH). Дополнительно, область данных, следующая за областью управления, используется для передачи данных пользователя или тому подобное, которая называется нисходящим физическим совместно используемым каналом (PDSCH).
В дополнение, общий опорный сигнал (CRS) конкретной соты представляет собой опорный сигнал конкретной соты, расположенной в области управления и в области данных. UE 20 выполняет контроль состояния канала посредством получения данного CRS и может осуществить демодуляцию PDSCH и т.п. на основании результата анализа канала.
Описание СоМР
Далее, приведено описание СоМР, которая относится к настоящему изобретению. СоМР является технологией, с помощью которой множество базовых станций, называемое набором СоМР, устанавливает связь для осуществления обмена данными с UE 20 и может увеличить зону покрытия, где может осуществляться связь с высокой скоростью передачи данных. Данная СоМР разделена примерно на Совместную Обработку и Скоординированное Планирование и/или Технологию Формирования Луча.
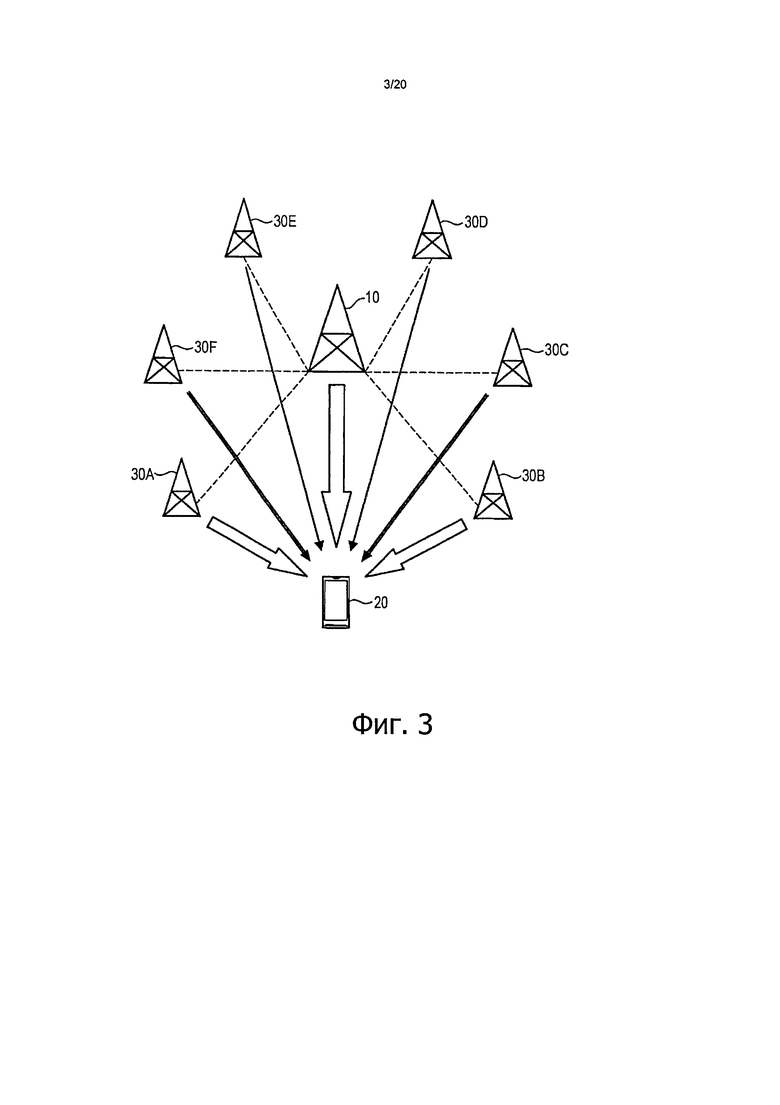
Предшествующая технология Совместной Обработки является технологией, с помощью которой множество базовых станций устанавливает связь с одним UE 20 одновременно. Например, как показано на фиг.3, где проиллюстрирован пример, в котором eNodeB 10 и RRHs 30A-30F передают данные на UE 20, в то же время данные подвергаются совместной обработке. Согласно данной технологии совместной обработки, в связи с тем что элементы (антенны и аналоговые схемы (процессоры беспроводной связи)) множества базовых станций могут быть использованы для передачи данных, то коэффициенты направленного действия антенны и SINR могут быть улучшены.
При осуществлении совместной обработки для нисходящей линии связи передача данных в UE 20 должна быть заранее распределена между RRHs 30A-30F через проводной канал связи, например называемый резервным каналом, между базовыми станциями. Кроме того, совместная обработка для восходящей линии связи выполняется интеграцией данных, принятых множеством базовых станций от UE 20.
Примеры способа интеграции данных включают в себя способ интеграции данных на уровне битов, которые были демодулированы каждой из базовых станций, способ интеграции данных программированного уровня битов, который еще не был декодирован каждой из базовых станций, способ интеграции данных, который еще не был распакован каждой из базовых станций, и тому подобное. Так как данные интегрированы после демодулирования последней части данных в каждой базовой станции, то количество данных, которыми обмениваются через резервный канал, увеличивается, значение производительности функционирования имеет тенденцию к улучшению.
Технология скоординированного планирования и/или формирования луча представляет собой технологию, при которой передача данных осуществляется только одной базовой станцией и осуществляется совместное планирование (функция управления, которая определяет блоки ресурсов, выделяемых для соответствующих UE 20) множества базовых станций. В соответствии с данной технологией скоординированного планирования и/или формирования луча взаимного влияния при работе базовых станций можно легко избежать осуществлением корректировки планирования.
Технология в соответствии с настоящим изобретением особенно фокусируется на предшествующую технологию, то есть на совместную обработку между двумя видами СоМР. Данная совместная обработка грубо разделяется на некогерентную совместную обработку и когерентную совместную обработку.
Технология когерентной совместной обработки представляет собой способ регулировки времени передачи данных каждой из базовых станций так, чтобы фазы данных, которые принимает оконечное устройство 20 связи, переданные соответствующими базовыми станциями, совпадали. С другой стороны, технология некогерентной совместной обработки представляет собой способ, в котором каждая из базовых станций передает данные без корректировки времени передачи данных каждой из базовых станций. Таким образом, способ когерентной совместной обработки превосходит по производительности способ некогерентной совместной обработки. Однако чтобы реализовать технологию когерентной совместной обработки, необходимо рассчитать величину регулировки времени передачи каждой из базовых станций 10 на каждое оконечное устройство 20 связи. Соответственно, это затрудняет осуществление комплексной обработки данных.
Описание набора СоМР
Набор СоМР - это термин, используемый в 3GPP, и означает сочетание базовых станций, которые совместно осуществляют передачу для реализации СоМР. Как правило, предполагается, что около трех eNodeBs 10 составляют набор СоМР. С другой стороны, три или более базовые станции, например пять или десять, составляют набор СоМР в гетерогенной среде, в которой соты, такие как Pico_eNodeBs, Home_eNodeBs, RRH_eNodeBs (в данном описании, называется просто RRHs) и т.п., накладываются. Более того, ожидается, чтобы набор СоМР динамически изменялся.
Кстати, поскольку расстояния до соответствующих базовых станций различаются в зависимости от расположения UE 20, то наилучший набор СоМР отличается для каждого из UE 20. Таким образом, важно определить наилучший набор СоМР для каждого из UE 20. Например, набор СоМР может быть определен способом, при котором базовые станции принимают информацию опорного сигнала принимаемой мощности (RSRP) CRS, где каждое из UE 20 принимает синхронизированный по времени сигнал от каждой из базовых станций и выбирается базовая станция из множества базовых станций, где RSRP имеет наилучшее значение, которые принимают информацию от UE 20.
Взаимосвязь между ID и СоМР
Вышеупомянутые Macro_eNodeBs 10 обычно имеют ID ячеек, которые отличаются для каждой из Macro_eNodeBs 10. Кроме того, было сделано предположение, что для RRHs 30 назначаются ID ячеек, отличные для каждого из RRHs 30. Тем не менее, в последнее время обсуждается сценарий, в котором множество RRHs 30, которые принадлежит к определенной Macro_eNodeB 10, используют один и тот же ID соты, что и Macro_eNodeB 10. В этом случае, поскольку Macro_eNodeB 10 и множество RRHs 30 передают один и тот же сигнал, существует преимущество, которое заключается в том, что взаимные помехи при работе RRHs 30 не возникают и можно легко выполнить СоМР, однако существует и недостаток, который заключается в том, что коэффициент усиления соты не улучшается.
Решение задачи, предложенное данным вариантом осуществления
Так как ID соты и опорный сигнал как CRS находятся во взаимно однозначном соответствии, когда eNodeB 10 и все RRHs 30 имеют одинаковый ID соты, как описано выше, считается, что CRSs, которые передаются eNodeB 10 и каждым из RRHs 30, являются идентичными. Поэтому даже если UE 20 пытается измерить и ответить на RSRP CRS, переданным каждым из RRHs 30, трудно отличить передающие станции CRS друг от друга. Таким образом, также трудно для eNodeB 10 выбрать лучший набор СоМР для UE 20. В результате, как показано на фиг.3, рассматривается способ, в котором eNodeB 10 и все RRHs 30 выполняет СоМР по отношению к UE 20.
Фиг.3 представляет собой пояснительную схему, иллюстрирующую пример варианта осуществления СоМР. Когда eNodeB 10 и все RRHs 30 выполняют СоМР по отношению к UE 20, как показано на фиг.3, UE 20 улучшает качество приема, получая тот же сигнал из eNodeB 10 и от всех RRHs 30.
Однако когда это подробно рассматривается, сигнал передачи из RRHs 30D и 30Е реально не улучшает качества приема UE 20, потому что мощность приема от RRHs 30D и 30Е, которые находятся на значительном расстоянии от UE 20, низка. Сигналы передачи от RRHs 30D и 30Е действуют как интерференционная волна и, следовательно, как полагают, приводит к ухудшению пропускной способности всей системы.
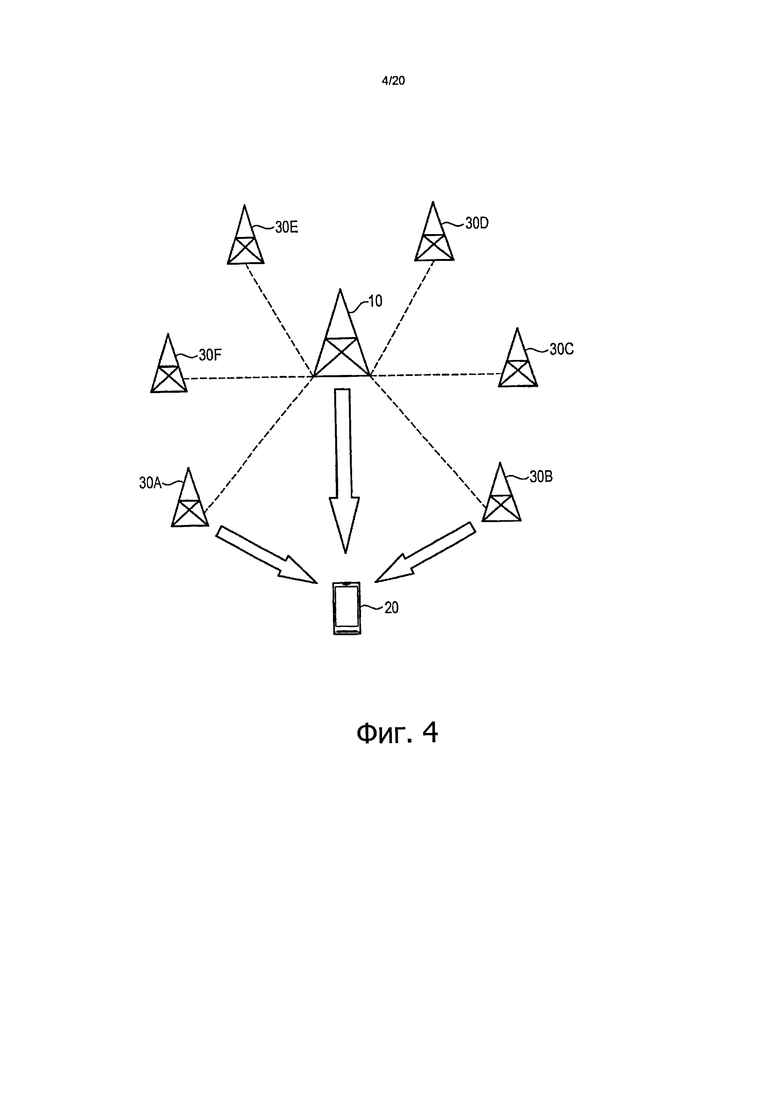
Таким образом, в идеальном случае, как показано на фиг.4, является предпочтительным, чтобы СоМР была выполнена с использованием только части RRHs 30 (например, RRHs 30А и 30В), которые вносят вклад в улучшение качества приема UE 20. Однако не было никакой возможности выбрать наилучший набор СоМР для UE 20, как описано выше. В этом отношении ожидается, что типовые UE из RE18, Re19 и RE110 примут тот же сигнал, переданный каждым из RRHs, если соответствующие RRHs 30 передают сигналы, на котором соответствующие RRHs могут быть выделены, в то время как соответствующие RRHs 30 имеют тот же ID соты, совместимость может быть потеряна.
Таким образом, ввиду вышеупомянутых обстоятельств каждый вариант осуществления настоящего изобретения был описан. В соответствии с каждым вариантом осуществления настоящего изобретения лучший набор СоМР для UE 20 может быть определен путем получения RSRP каждого из RRHs 30 в UE 20. Далее подробно описывается каждый вариант осуществления настоящего изобретения следующим образом.
2. Первый вариант осуществления
2-1. Конфигурация базовой станции
Фиг.5 представляет собой функциональную схему, иллюстрирующую конфигурацию eNodeB 10-1 и RRHs 30 в соответствии с первым вариантом осуществления. Как показано на фиг.5, каждый из RRHs 30 включает в себя антенную группу 304 и беспроводное устройство 310 обработки и передает сигнал нисходящей линии связи, поставленный eNodeB 10-1 по оптическому волокну в UE 20-1 в соответствии с первым вариантом осуществления. Кроме того, каждый из RRHs 30 поставляет сигнал по восходящей линии связи, принятый из UE 20-1, в eNodeB 10-1 по оптическому волокну. Каждый из RRHs 30 имеет тот же идентификатор соты, как и eNodeB 10-1, и передает тот же опорный сигнал конкретной соты (например, CRS).
Более того, как показано на фиг.5, eNodeB 10-1 включает в себя антенную группу 104, беспроводное устройство 110 обработки, DA/AD конвертер 120, детектор 130 сигнала восходящей линии связи (UL), планировщик 140, генератор 150 сигнала нисходящей линии связи (DL), блок 160 удержания установки ABS, блок 170 удержания RSRP и блок 180 определения набора СоМР. Практически бланковый субфрейм (ABS) представляет собой технологию, которая была принята в RE110 из 3GPP, и ABS является субфреймом, большинство из которых прекращается с передачей. Например, только PDCCH и CRS передаются в субфрейме, который устанавливается как ABS. Первый вариант осуществлен с учетом ABS.
Антенная группа 104 принимает радиосигнал от UE 20-1, получает электрический высокочастотный сигнал и подает высокочастотный сигнал в беспроводное устройство 110 обработки. Более того, антенная группа 104 передает радиосигнал в UE 20-1 на основе высокочастотного сигнала, поставленного от беспроводного устройства 110 обработки. Поскольку eNodeB 10-1 включает в себя антенную группу 104, включающую в себя множество антенн, eNodeB 10-1 может осуществлять связь MIMO и связь с разнесенным приемом.
Беспроводное устройство 110 обработки преобразует сигнал высокой частоты, переданный антенной группой 104, в модулирующий сигнал (сигнал восходящей линии связи), выполняя аналоговую обработку, такую как усиление, фильтрацию и преобразование с понижением частоты. Кроме того, беспроводное устройство 110 обработки преобразовывает модулирующий сигнал (сигнал нисходящей линии связи), передаваемый DA/AD конвертером 120, в высокочастотный сигнал.
DA/AD конвертер 120 преобразовывает сигнал восходящей линии связи в аналоговом формате, передаваемый беспроводным устройством 110 обработки, в цифровой формат и передает преобразованный сигнал на детектор 130 сигнала UL. Более того, DA/AD конвертер 120 преобразовывает сигнал нисходящей линии связи цифрового формата, передаваемый генератором 150 сигнала DL, в аналоговый формат и передает преобразованный сигнал на беспроводное устройство 110 обработки.
Более того, сигналы в нисходящей линии связи для соответствующих RRHs 30 передаются в DA/AD конвертер 120 от генератора 150 сигнала DL. Таким образом, DA/AD конвертер 120 преобразовывает сигнал нисходящей линии связи для каждого из этих RRHs 30 в аналоговый формат и передает преобразованный сигнал в соответствующий RRH 30 по оптическому волокну. Сигнал восходящей линии связи передается в DA/AD конвертер 120 от каждого из RRHs 30 по оптическому волокну, который преобразовывает сигнал восходящей линии связи в цифровой формат и поставляет преобразованный сигнал на детектор 130 UL сигнала.
Детектор 130 UL сигнала обнаруживает сигнал управления, такой как PUCCH, или данные пользователя, такие как PUSCH, из сигнала восходящей линии связи, переданного DA/AD конвертером 120. В частности, детектор 130 UL сигнала согласно этому варианту осуществления определяет RSRP результат измерений, полученный в результате CRS измерения в UE 20-1 из сигнала восходящей линии связи, подаваемый DA/AD конвертером 120. Значение результата измерения RSRP может быть включено в PUSCH.
Планировщик 140 осуществляет планирование ресурсов, которые будут использоваться eNodeB 10-1, каждым из RRHs 30 и 20-1 UE для реализации связи. В частности, планировщик 140 согласно этому варианту осуществления выполняет планирование на основе базовой станции (eNodeB 10-1 или каждый из RRHs 30), где ABS устанавливается блоком 160 удержания установки ABS и позицией субфрейма. Более того, планировщик 140 планирует установление связи с UE 20-1 с помощью набора СоМР для UE 20-1, который определяется блоком 180 определения набора СоМР.
Генератор 150 сигнала DL генерирует сигнал нисходящей линии связи, который передается из eNodeB 10-1 и каждого из RRHs 30. В частности, генератор 150 сигнала DL генерирует PDCCH, PDSCH и т.п.в соответствии с графиком планирования, сформированным планировщиком 140. Дополнительно, генератор 150 сигнала DL согласно этому варианту осуществления, устанавливает позицию субфрейма, которая задается блоком 160 удержания установки ABS, как ABS, в ABS для eNodeB 10-1 и каждого из RRHs 30. Более того, в PDCCH или PDSCH может содержать информацию о ABS, который установлен блоком 160 удержания установки ABS. Далее, субфрейм, который устанавливается как ABS, подробно описан со ссылками на фи.6 и 7.
Фиг.6 является пояснительной схемой, иллюстрирующей субфрейм, который установлен как ABS. В субфрейм, который установлен как ABS, как показано на фиг.6, PDSCH не передается в области данных. С другой стороны, передача PDCCH и CRS (опорный сигнал) не остановлена в области данных.
Фиг.7 является пояснительной схемой, иллюстрирующей субфрейм, который установлен как ABS и как для многоадресной одночастотной сети мультимедийного вещания (MBSFN). Как показано на фиг.7, все передачи, кроме передачи CRS, могут быть остановлены в области управления установкой как ABS, так и MBSFN в субфрейм. В этом варианте осуществления, как подробно описано ниже, ABS и MBSFN установлены в eNodeB 10-1 и каждый из RRHs 30 так, что RSRPs соответствующих RRHs 30 могут быть получены в UE 20-1.
Здесь, возвращаясь к описанию конфигурации eNodeB 10-1 со ссылкой на фиг.5, блок 160 удержания установки ABS устанавливает ABS (который может содержать MBSFN, то же ниже) относительно, по меньшей мере, части субфрейма eNodeB 10-1 и RRHs 30A-30F. Блок 160 удержания установки ABS ассоциирует и удерживает информацию, которая указывает на установленный субфрейм как ABS, и информацию, которая указывает базовую станцию, где установлен ABS.
Блок 160 удержания установки ABS устанавливает тот же субфрейм, как ABS в базовой станции за исключением одной базовой станции, или за исключением двух или более базовых станций из eNodeB 10-1 и RRHs 30A-30F. Как результат, в субфреймах, которые установлены как ABS, только одна базовая станция или только две или более базовых станций будут передавать CRS в области данных. Далее, процесс установки такого ABS описан более конкретно со ссылками на фигуры с 8 по 10.
Фиг.8 является пояснительной схемой, иллюстрирующей пример установки ABS. Когда субфрейм # 3 радиофреймов с # М по # Н устанавливается как ABS в eNodeB 10-1 и RRHs с 30В по 30F, за исключением RRH 30А, как показано в первой строке фиг.8, только RRH 30А передает CRS в области данных субфрейма # 3 из радиофреймов с # М по # Н, как показано в верхней части фиг.9.
Аналогичным образом, когда субфрейм # 3 радиофреймов с # N+1 по # О, устанавливается как ABS eNodeB 10-1, RRH 30А и RRHs с 30С по 30F, исключением RRH 30В, как показано во втором ряду на фиг.8, только RRH 30В передает CRS в области данных субфрейма # 3 радиофреймов с # N+1 по # О, как показано в нижней части фиг.9. При повторении такой установки можно генерировать субфреймы с областью данных, в которых только каждый из RRHs 30A-30F может передавать CRS.
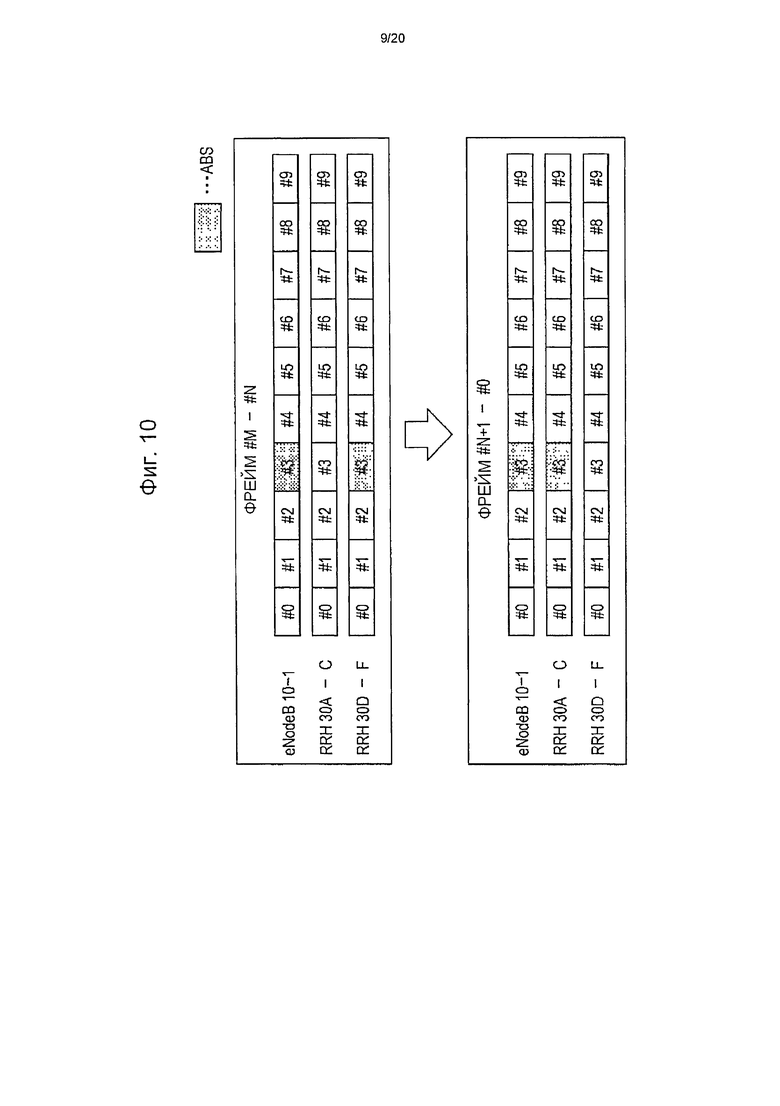
Хотя был описан выше пример установки ABS, исключающий только один RRH 30, этот вариант осуществления не ограничивается данным примером. Например, блок 160 удержания установки ABS может группировать eNodeB 10-1 и RRHs 30A-30F в две или более группы базовых станций, a ABS может быть установлено за исключением некоторых групп базовой станции. Здесь и далее, будет описан конкретный пример со ссылкой на фиг.10.
Фиг.10 является пояснительной схемой, иллюстрирующей пример установки ABS, когда базовые станции сгруппированы. Как показано на фиг.10, блок 160 удержания установки ABS может сгруппировать RRHs 30A-30F в группу базовых станций, которая включает в себя RRHs с 30А по 30С, и группу базовых станций, которая включает в себя RRHs с 30D по 30F. В этом случае блок 160 удержания установки ABS может вызвать только группу базовой станции, которая включает в себя RRHs с 30А по 30С, для передачи CRS в области данных субфрейма # 3, установив субфрейм # 3 радиофеймов с # М по # N как ABS для eNodeB 10-1 и группы базовых станций, которая включает в себя RRHs с 30D по 30F.
Аналогичным образом, как показано в нижней части фиг.10, блок 160 удержания установки ABS может вызвать лишь группу базовых станций, которая включает в себя RRHs с 30D по 30F для передачи CRS в области данных субфрейма # 3, установив субфрейм # 3 радиофреймов с # N+1 по # О, как ABS на eNodeB 10-1 и группу базовых станций, которая включает в себя RRHs с 30А по 30С. В результате, хотя подробности будут описаны позднее, можно определить группу базовых станций, где результат измерения RSRP в UE 20-1 показывает наилучший набор СоМР.
Дополнительно, блок 160 удержания установки ABS может установить ABS так, что группа базовых станций, где результат измерения RSRP в UE 20-1 показывает наилучшее значение, прежде всего, отличается, и затем RSRPs соответствующих RRHs 30, которые образуют соответствующую группу базовых станций, может быть получена. В соответствии с этой конфигурацией, поскольку RRHs 30, где RSRP в UE 20-1 имеет наилучший результат, могут быть определены на этапах, такая конфигурация является эффективной с точки зрения необходимого времени и эффективности.
Здесь, возвращаясь к описанию конфигурации eNodeB 10-1 ссылкой на фиг.5, блок 170 удержания RSRP удерживает RSRP результаты измерений в UE 20-1, обнаруженные детектором 130 UL сигнала, с учетом временных периодов (например, количество радиофреймов и/или количество субфреймов) для измерения UE 20-1.
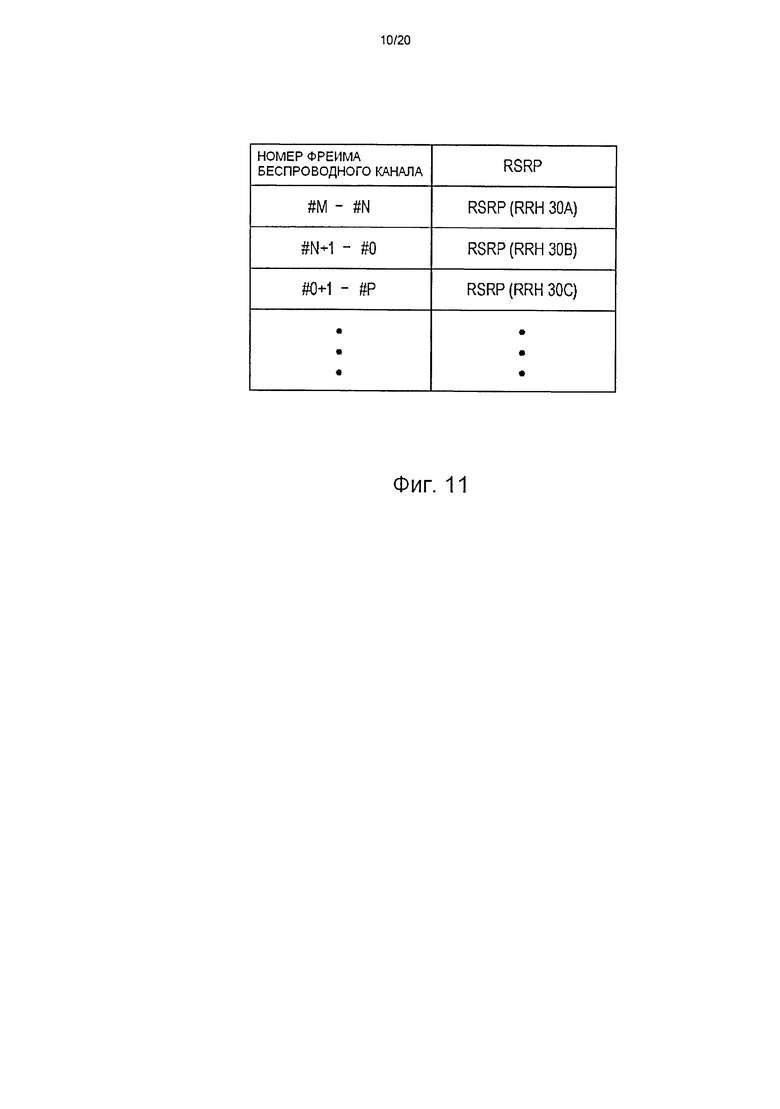
Фиг.11 представляет собой пояснительную схему, иллюстрирующую пример информации, которая удерживается блоком 170 удержания RSRP. Когда блок 160 удержания установки ABS устанавливает ABS, например, как показано на фиг.8, блок 170 удержания RSRP содержит информацию, как показано на фиг.11, на основании обратной связи из UE 20-1. В частности, блок 170 удержания RSRP ассоциирует и удерживает радиофреймы от # М до # Н, которые устанавливаются как ABS, и RSRPs измерен UE 20-1 в соответствующих радиофреймах, так что CRS может быть передано только из RRH 30А. Аналогично, блок 170 удержания RSRP ассоциирует и удерживает количество радиофреймов, на которые установлен ABS, и RSRPs измерен UE 20-1 в соответствующих радиофреймах, так что CRS может быть передан только из одного из RRHs 30.
Блок 180 определения набора СоМР определяет набор СоМР для выполнения СоМР с каждым из UE 20-1. В частности, блок 180 определения набора СоМР определяет, какие RRH 30 RSRP в каждом из радиофреймов, которые удерживаются блоком 170 удержания RSRP, ассоциированы сопоставлением RSRPs с установочной информацией ABS, которая удерживается блоком 160 удержания установки ABS. Блок 180 определения набора СоМР определяет подходящий набор СоМР для UE 20-1 на основе RSRP каждого из RRHs 30.
Например, блок 180 определения набора СоМР может определять заданное количество RRHs 30 из числа тех, где RSRP наилучшая, как набор СоМР. Альтернативно, блок 180 определения набора СоМР может определить RRHs 30, где RSRP превышает заданное значение в качестве набора СоМР. Дополнительно, блок 180 определения набора СоМР может определить выбранные RRHs 30 из тех, где RSRP имеет наилучшее значение, таким образом, чтобы общий объем RSRPs достигал заданного значения, как набор СоМР. Набор СоМР может содержать или не содержать eNodeB 10-1.
2-2. Конфигурация UE
Конфигурация NodeB 10-1 и RRH 30 в соответствии с первым вариантом осуществления были описаны выше. Далее, приведено описание конфигурации UE 20-1 в соответствии с первым вариантом осуществления.
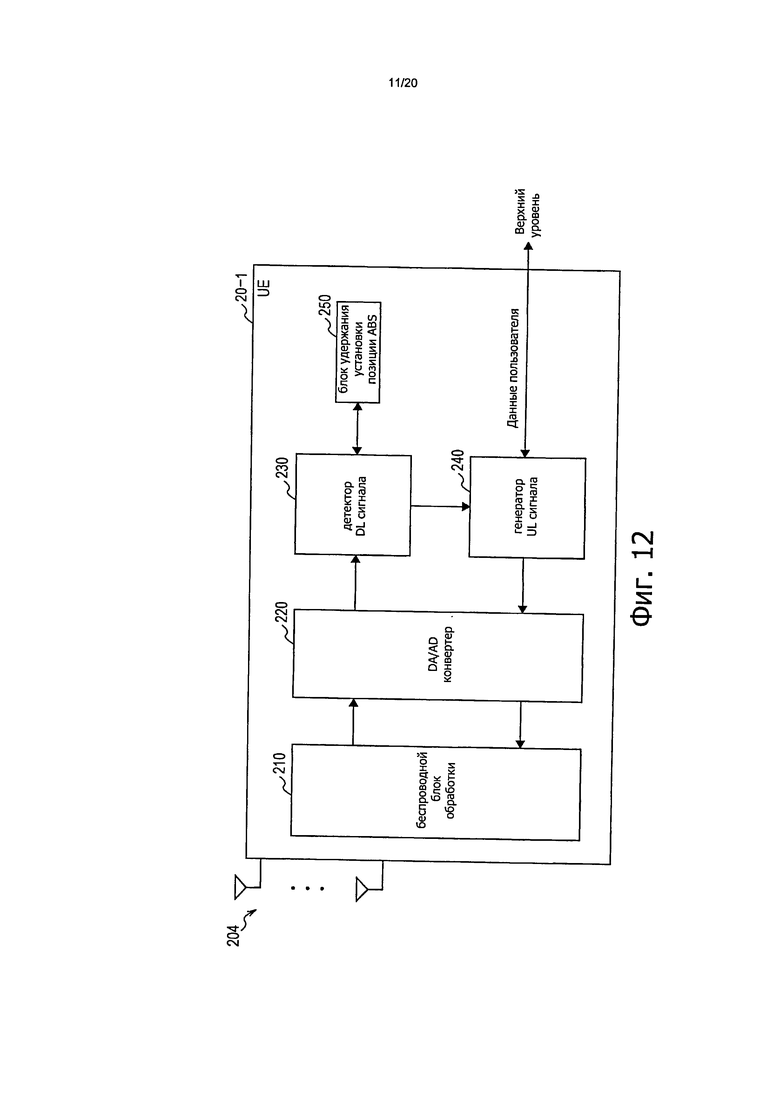
Фиг.12 является функциональной блок-схемой, иллюстрирующей конфигурацию UE 20-1 в соответствии с первым вариантом осуществления. Как показано на фиг.12, UE 20-1 включает в себя антенную группу 204, беспроводной блок 210 обработки, DA/AD конвертер 220, детектор 230 сигнала DL, генератор 240 сигнала UL и блок 250 удержания установочной позиции ABS.
Антенная группа 204 принимает радиосигнал от eNodeB 10-1 и RRHs 30, получая электрический высокочастотный сигнал, и поставляет высокочастотный сигнал в беспроводной блок 210 обработки. Более того, антенная группа 204 передает радиосигнал на eNodeB 10-1 и RRHs 30 на основе сигнала высокой частоты, подаваемого от беспроводного блока 210 обработки. UE 20-1 включает в себя антенную группа 204, которая включает в себя множество антенн, как описано ранее, так что UE 20-1 может осуществлять связь MIMO или связь с разнесенным приемом.
Беспроводной блок 210 обработки преобразует сигнал высокой частоты, подаваемый антенной группой 204, в модулирующий сигнал (сигнал нисходящей линии связи), выполняя аналоговую обработку, такую как усиление, фильтрацию и преобразование с понижением частоты. Кроме того, беспроводной блок 210 обработки преобразует модулирующий сигнал (сигнал восходящей линии связи), подаваемый DA/AD конвертером 220, в сигнал высокой частоты. Таким образом, беспроводной блок 210 обработки взаимодействует с антенной группой 204 таким образом, чтобы функционировать в качестве передатчика и приемника.
DA/AD конвертер 220 преобразовывает сигнал нисходящей линии связи аналогового формата, подаваемый беспроводным блоком 210 обработки, в цифровой формат и передает преобразованный сигнал на детектор 230 сигнала DL. Кроме того, DA/AD конвертер 220 преобразовывает сигнал восходящей линии связи цифрового формата, подаваемый генератором 240 UL сигнала, в аналоговой формат и подает преобразованный сигнал на беспроводной блок 210 обработки.
Детектор 230 сигнала DL обнаруживает сигнал управления, такой как PDCCH, данные пользователя, такие как PDSCH, или т.п. из сигнала нисходящей линии связи, поставленного DA/AD конвертером 220. В частности, детектор 230 сигнала DL согласно этому варианту осуществления извлекает информацию, которая указывает установочную позицию ABS, из PDCCH или PDSCH. Информация, которая указывает установочную позицию ABS, соответствует положению для измерения RSRP и удерживается в блоке 250 удержания установочной позиции ABS. Более того, детектор 230 сигнала DL функционирует как измерительный блок, который измеряет RSRP в установочной позиции ABS, которая удерживается в блоке 250 установки позиции удержания ABS. Согласно этому варианту осуществления, поскольку только некоторые базовые станции из eNodeB 10-1 и RRHs 30A-30F передают CRS в установочной позиции ABS, детектор 230 сигнала DL может измерить RSRP только часть базовых станций.
Генератор 240 UL сигнала генерирует сигнал восходящей линии связи, подлежащий передаче на eNodeB 10-1 и каждый из RRHs 30. В частности, генератор 240 UL сигнала генерирует сигнал управления как PUCCH и сигнал данных пользователя как PUSCH. В частности, генератор 240 сигнала UL, согласно этому варианту осуществления, генерирует PUCCH или PUSCH, включающий в себя результат измерений RSRP, полученный детектором 230 сигнал DL.
2-3. Функционирование системы связи
Ранее были описаны конфигурации eNodeB 10-1, RRHs 30 и UE 20-1 согласно первому варианту осуществления. Далее будет приведено описание функционирования системы связи, которая включает в себя eNodeB 10-1, RRHs 30 и UE 20-1, со ссылкой на фиг.13.
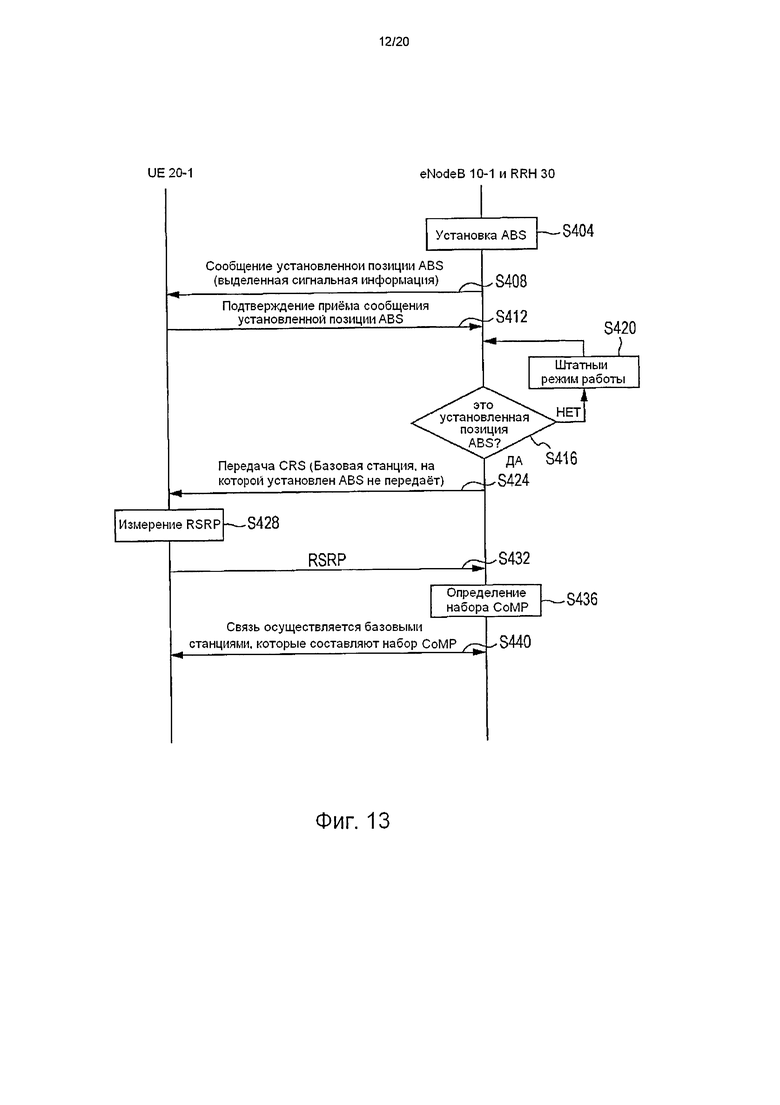
Фиг.13 представляет собой блок-схему алгоритма, иллюстрирующую работу системы связи. Как показано на фиг.13, когда блок 160 удержания установки ABS eNodeB 10-1 сначала устанавливает ABS (S404), то eNodeB 10-1 уведомляет UE 20-1 информацией, которая указывает установочную позицию ABS, направлением выделенной сигнальной информации (S408). Когда информация, которая указывает установочную позицию ABS, получена, то 20-1 UE передает подтверждение получения в eNodeB 10-1 (S412).
Следовательно, eNodeB 10-1 и RRHs 30 работают в штатном режиме эксплуатации до момента получения информации, указывающей установочную позицию ABS (S416, S420). Затем, когда информация об установочной позиции ABS поступила, только RRHs 30, где ABS не установлен, передает CRS в области данных, но ни eNodeB 10-1, ни другой RRHs 30 не передают CRS в области данных (S424).
С другой стороны, UE 20-1 измеряет RSRP на установочной позиции ABS на основании информации уведомления на S408 (S428). Затем, UE 20-1 передает результат измерения RSRP в eNodeB 10-1 (S432).
После этого eNodeB 10-1 определяет подходящий набор СоМР для UE 20-1 на основании RSRP каждого из RRHs 30 или RSRP каждой группы RRHs 30, когда RSRP каждого из RRHs 30 или RSRP каждой группы RRHs 30 полностью собраны (S436). Затем eNodeB 10-1 и RRHs 30, которые составляют определенный набор СоМР, осуществляют СоМР коммуникацию с UE 20-1 (S440). В частности, eNodeB 10-1 поставляет сигнал нисходящей линии на RRHs 30, которые составляют определенный набор СоМР, и RRHs 30, которые составляют набор СоМР, посылает поданный сигнал нисходящей линии на UE 20-1 совместно с eNodeB 10-1. Дополнительно, если eNodeB 10-1 поставляет сигнал нисходящей линии связи на RRHs 30, которые образуют набор СоМР, как описано выше, то сигнал нисходящей линии связи передается из соответствующих RRHs 30 так, что СоМР коммуникация может быть достигнута. Таким образом, определенный набор СоМР не обязательно уведомляется для RRHs 30.
Как описано выше, согласно первому варианту осуществления RSRP в UE 20-1 каждой из RRHs 30 может быть измерен даже в ситуации, в которой каждый из RRHs 30 передает тот же самый CRS. Таким образом, eNodeB 10-1 может определить подходящий набор СоМР для UE 20-1 на основе RSRP каждого из RRHs 30 в UE 20-1.
2-4. Модификация
Хотя пример, где блок 160 удержания установки ABS устанавливает ABS в разных радиофреймах для различных RRHs 30, был описан выше со ссылкой на фиг.9 и т.п., но этот вариант осуществления не ограничивается данным примером. Например, блок 160 удержания установки ABS может установить ABS на множество субфреймов в пределах того же радиофрейма для различных RRHs 30, как описано со ссылкой на фиг.14.
Фиг.14 является пояснительной схемой, иллюстрирующей модификацию способа установки ABS. Как показано на фиг.14, блок 160 удержания установки ABS может установить ABS для базовых станций, кроме RRH 30А в субфрейме №3 того же радиофрейма и установить ABS для базовых станций, кроме RRH 30В в субфрейме №4. В этом случае, как только RRH 30А передает CRS в области данных субфрейма №3, то UE 20-1 может измерить RSRP из RRH 30А в субфрейме №3. Аналогичным образом, UE 20-1 может измерить RSRP из RRH 30В в субфрейме №4.
В этой модификации UE 20-1 может сообщать результаты измерения RSRP и номера субфреймов, где RSRP измерен, в сочетании друг с другом для eNodeB 10-1 таким образом, что eNodeB 10-1 может различать, какой RRH 30 ассоциирован с уведомлением RSRP от UE 20-1.
Аналогично данной модификации, когда ABS установлен в различных RRHs 30 относительно множества субфреймов одного и того же радиофрейма, время для получения RSRPs соответствующих RRHs 30 может быть сокращено.
3. Второй вариант осуществления
Выше был описан первый вариант осуществления настоящего изобретения. Далее приводится описание второго варианта осуществления настоящего изобретения. Согласно второму варианту осуществления получение RSRP каждого из RRHs 30 осуществляется измерением опорного сигнала, который называется CSI-RS, а не измерением CRS, как это описано в первом варианте осуществления. В дальнейшем, прежде всего, описывается CSI-RS, после чего будут описаны детали второго варианта осуществления.
3-1. Описание CSI-RS
Информация о состоянии канала опорного сигнала (CSI-RS) является опорным сигналом, установленным LTE-Advanced (RE110). Данный CSI-RS используется для измерения качества канала, а не с целью демодуляции данных. Таким образом, CSI-RS прореживается в направлениях частоты и времени и вставляется сравнительно редко. Например, период вставки CSI-RS может быть установлен в диапазоне от примерно 5 мс до 80 мс, так и 10 мс. Поскольку установка CSI-RS (например, такие установки, как регулировка период вставки до 5 мс или до 10 мс) может быть выполнена для каждого UE, то можно сказать, что установка (конфигурация) является UE_Specific.
Более того, как указано в разделе 36.2116.10.5.1 RE110, псевдослучайная последовательность используется для CSI-RS. Однако начальное значение случайной последовательности отличается для каждой соты (ID соты). Таким образом, поскольку CSI-RS является первоначально cell_specific, то базовая станция, которая является передающей станцией CSI-RS, может быть опознана UE.
Однако когда соответствующие RRHs 30 имеют одинаковый ID соты, то CSI-RSs, передаваемые соответствующими RRHs 30, также идентичны. Более того, хотя период вставки CSI-RS может быть установлен в блоках соты, когда каждый из RRHs 30 имеет тот же ID соты, то периоды вставки CSI-RS (временные) соответствующих RRHs 30 становятся также идентичными. Таким образом, было трудно отличить RRH 30, который является передающей станцией CSI-RS, измеренный UE, и определить подходящий набор СоМР для UE.
Второй вариант осуществления настоящего изобретения представляет собой технологию, которая решает данную техническую задачу, принимая вышеупомянутые обстоятельства во внимание. В соответствии со вторым вариантом осуществления настоящего изобретения можно отличить RRH 30, которая является передающей станцией CSI-RS, принимаемого UE. Второй вариант осуществления настоящего изобретения будет подробно описан ниже.
3-2. Конфигурация базовой станции
Фиг.15 является функциональной блок-схемой, иллюстрирующей конфигурации eNodeB 10-2 и RRHs 30 в соответствии со вторым вариантом осуществления настоящего изобретения. Как показано на фиг.15, каждый из RRHs 30 передает сигнал нисходящей линии связи, поданный eNodeB 10-2 через оптическое волокно для UE 20-2, в соответствии со вторым вариантом осуществления аналогично первому варианту осуществления. Кроме того, каждый из RRHs 30 подает сигнал восходящей линии связи, принятый из UE 20-2 в eNodeB 10-2 через оптическое волокно. Каждый из RRHs 30 имеет тот же ID соты, как eNodeB 10-2, и передает тот же опорный сигнал конкретной соты (например, CSI-RS).
Более того, как показано на фиг.15, eNodeB 10-2 согласно второму варианту осуществления включает в себя антенную группу 104, беспроводное устройство ПО обработки, DA/AD конвертер 120, детектор 130 сигнала восходящей линии связи (UL), планировщик 140 и генератор 150 сигнала нисходящей линии связи (DL), блок 162 удержания установки периода CSI-RS, блок 172 удержания RSRP и блок 182 определения набора СоМР. Поскольку антенная группа 104, беспроводное устройство ПО обработки и DA/AD конвертер 120 были описаны в первом варианте осуществления, их подробное описание не приводится.
Детектор 130 сигнала UL обнаруживает сигнал управления, такой как PUCCH, и данные пользователя, такие как PUSCH, из сигнала восходящей линии связи, поставленный DA/AD конвертером 120. В частности, детектор 130 сигнала UL согласно этому варианту осуществления определяет результат измерения RSRP, полученный в результате CSI-RS измерения в UE 20-2 из сигнала восходящей линии связи, поставленный DA/AD конвертером 120. Результат измерения RSRP может содержаться в PUSCH.
Планировщик 140 распределяет ресурсы, которые будут использоваться eNodeB 10-2, каждым из RRHs 30 и 20-2 UE для коммуникации. В частности, планировщик 140 согласно данному варианту осуществления выполняет планирование в соответствии с периодом вставки CSI-RS, установленным блоком 162 удержания установки периода CSI-RS. Кроме того, планировщик 140 планирует установление связи с UE 20-2 с помощью набора СоМР, который определяется для коммуникации с UE 20-2 блоком 182 определения набора СоМР.
Генератор 150 сигнала DL генерирует сигнал нисходящей линии связи, который передается от eNodeB 10-2 и каждым из RRHs 30. В частности, генератор 150 сигнала DL генерирует PDCCH, PDSCH и т.п. в соответствии с планированием, выполняемым планировщиком 140. Кроме того, генератор 150 сигнала DL согласно данному варианту осуществления вставляет CSI-RS в eNodeB 10-2 и каждый из RRHs 30 в соответствии с периодом, установленным блоком 162 удержания установки периода CSI-RS. Кроме того, PDCCH или PDSCH может содержать информацию о периоде вставки CSI-RS, установленного блоком 162 удержания установки периода CSI-RS.
Блок 162 удержания установки периода CSI-RS устанавливает период вставки CSI-RS для eNodeB 10-2 и каждого из RRHs 30. Например, блок 162 удержания установки периода CSI-RS устанавливает различные периоды вставки (вставка периода времени) для eNodeB 10-2 и каждого из RRHs 30. В результате можно установить передающую станцию CSI-RS, когда UE 20-2 принимает CSI-RS в определенный период времени. Далее приведено более подробное описание периода вставки CSI-RS со ссылкой на фиг.16.
Фиг.16 представляет собой пояснительную схему, иллюстрирующую конкретный пример периода вставки CSI-RS. Как показано на фиг.16, блок 162 удержания установки периода CSI-RS устанавливает периоды вставки CSI-RS так, что могут быть периоды времени, в течение которых только некоторые базовые станции из eNodeB 10-2 и каждая из RRHs 30 передает CSI-RS.
Например, блок 162 удержания установки периода CSI-RS устанавливает периоды период t1, t3, t5 и t7 вставки CSI-RS для eNodeB 10-2, как показано на фиг.16, и устанавливает периоды t2 и t4 вставки CSI-RS для RRH 30А. Таким образом, только RRH 30А передает CSI-RS в течение t2 и t4. Аналогично, блок 162 удержания установки периода CSI-RS устанавливает периоды t6 и t8 вставки CSI-RS для RRH 30В. Таким образом, только RRH 30В передает CSI-RS в течение t6 и t8. Аналогичным образом, можно генерировать временные периоды, в течение которых только каждый из RRHs 30 передает CSI-RS установкой периодов вставки CSI-RS, отличающееся от eNodeB 10-2 для каждого из RRHs 30.
Пример установки периодов t1, t3, t5 и t7 вставки CSI-RS только для eNodeB 10-2 показан на фиг.16, но эти периоды вставки CSI-RS могут быть установлены для каждого из RRHs 30. В таком случае UE до REL10 принимают CSI-RSs из множества RRHs 30 в течение тех же периодов t1, t3, t5 и t7 и получают каналы без выделения передающих станций соответствующих CSI-RSs. С другой стороны, UE 20-2 вниз от ReEL1 могут принять CSI-RSs в периоды времени, в течение которых только каждый из RRHs 30 передает путем установки множества периодов, в качестве периодов приема CSI-RS. То есть способ установки CSI-RS согласно второму варианту осуществления может обеспечить совместимость с существующими UE.
Более того, хотя пример установки различных периодов вставки CSI-RS для каждого из RRHs 30 был описан в вышеупомянутом варианте осуществления, этот вариант осуществления не ограничивается данным примером. Например, блок 162 удержания установки периода CSI-RS может сгруппировать RRHs 30A-30F на две или несколько групп и установить такой же период вставки SCI-RS для RRHs 30, которые составляют одну группу. Далее процесс такой установки подробно описан со ссылкой на фиг.17.
Фиг.17 является пояснительной схемой, иллюстрирующей пример установки периодов CSI-RS, когда RRHs 30 сгруппированы. Как показано на фиг.17, блок 162 удержания установки периода CSI-RS может сгруппировать RRHs 30A-30F в группу, которая включает в себя RRHs с 30A по 30С, и группу, которая включает в себя RRHs с 30D по 30F. В этом случае блок 162 удержания установки периода CSI-RS может вызвать только RRHs с 30А по 30С для передачи CSI-RS в течение периодов времени t2 и t4 установкой периодов t2 и t4 вставки CSI-RS для группы, которая включает в себя RRHs с 30А по 30С.
Аналогично блок 162 удержания установки периода CSI-RS может вызвать только RRHs 30D-30F для передачи CSI-RS в течение периодов t6 и t8 установкой периодов t6 и t8 вставки CSI-RS для группы, которая включает в себя RRHs 30D-30F. В результате, возможно определить группу, где результат измерения RSRP в UE 20-2 имеет наилучшее значение, например, как набор СоМР.
Дополнительно, блок 162 удержания установки периода CSI-RS может установить периоды вставки CSI-RS так, что группа, где результат измерения RSRP в UE 20-2 имеет наилучшее значение, во-первых, различается, и затем, RSRP каждого из 30 RRHs, которые образуют соответствующую группу, могут быть достигнуто. В соответствии с этой конфигурацией, поскольку RRHs 30, где RSRP в UE 20-2 имеет наилучшее значение, могут быть установлены на этапах, конфигурация является эффективной с точки зрения требуемого времени и эффективности.
Здесь, возвращаясь к описанию конфигурации eNodeB 10-2 со ссылкой на фиг.15, блок 172 удержания RSRP удерживает результаты измерений RSRP в UE 20-2, выявленные детектором 130 сигнала UL совместно с временными периодами (например, количеством радиофреймов и количеством субфреймов) для выполнения измерения UE 20-2.
Блок 182 определения набора СоМР определяет набор СоМР для выполнения СоМР с каждым из UE 20-2. В частности, блок 182 определения набора СоМР определяет, какие RRH 30 RSRP в каждом из радиофреймов, удержанные в блоке 172 удержания RSRP, ассоциированы путем сопоставления RSRP с установочной информацией каждой базовой станции, удержанных блоком 162 удержания установки периода CSI-RS. Блок 182 определения набора СоМР определяет подходящий набор СоМР для UE 20-2 на основании RSRP каждого из RRHs 30.
Например, блок 182 определения набора СоМР может определять заданное число RRHs 30 из числа тех, в которых RSRP имеет наилучшее значение, как набор СоМР. С другой стороны, блок 182 определения набора СоМР может определять RRHs 30, в которых RSRP превышает заданное значение, как набор СоМР. Кроме того, блок 182 определения набора СоМР может определять, как набор СоМР, RRHs 30, выбранный из тех, в которых RSRP имеет наилучшее значение, так что общее значение RSRPs достигает заданного значения. Набор СоМР может содержать или может не содержать eNodeB 10-2.
3-3. Конфигурация UE
Выше были описаны конфигурации eNodeB 10-2 и RRHs 30 в соответствии со вторым вариантом осуществления. Далее приведено описание конфигурации UE 20-2 в соответствии со вторым вариантом осуществления.
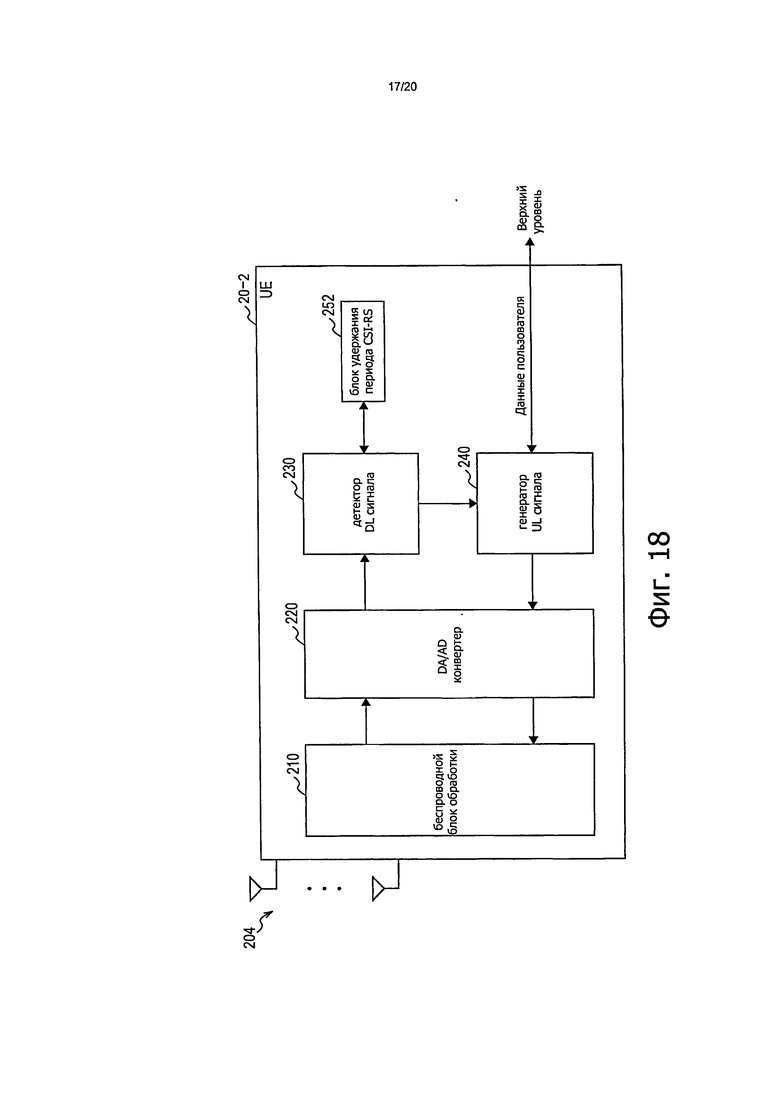
Фиг.18 является функциональной блок-схемой, иллюстрирующей конфигурацию UE 20-2 согласно второму варианту осуществления. Как показано на фиг.18, UE 20-2 включает в себя антенную группу 204, беспроводной блок 210 обработки 210, DA/AD конвертер 220, детектор 230 сигнала DL, генератор 240 сигнала UL и блок 252 удержания периода CSI-RS. Поскольку антенная группа 204, беспроводное 210 устройство обработки и DA/AD конвертер 220 были описаны в первом варианте осуществления, их подробное описание не приводится.
Детектор 230 сигнала DL обнаруживает сигнал управления, такой как PDCCH, и данные пользователя, такие как из PDSCH, из сигнала нисходящей линии связи, подаваемого от DA/AD конвертера 220. В частности, детектор 230 сигнала DL согласно этому варианту осуществления извлекает информацию, которая указывает период вставки CSI-RS из PDCCH или PDSCH. Информация, которая указывает период вставки CSI-RS, соответствует положению для измерения RSRP и удерживается блоком 252 удержания периода CSI-RS. Кроме того, детектор 230 сигнала DL измеряет RSRP для периода вставки CSI-RS, удерживаемого в блоке 252 удержания периода CSI-RS. Согласно этому варианту осуществления, поскольку только некоторые базовые станции eNodeB 10-2 и RRHs 30A-30F передают CSI-RS в течение периодов вставки CSI-RS, детектор 230 сигнала DL может измерить RSRPs части базовых станций.
Генератор 240 UL сигнала генерирует сигнал восходящей линии связи, подлежащий передаче в eNodeB 10-2 и каждый из RRHs 30. В частности, генератор 240 UL сигнала генерирует сигнал управления как PUCCH и сигнал данных пользователя как PUSCH. В частности, генератор 240 UL сигнала, согласно данному варианту осуществления генерирует PUCCH или PUSCH, включающий в себя результат измерения RSRP, полученный детектором 230 сигнала DL.
3-4. Функционирование системы связи
Ранее был описан процесс функционирования eNodeB 10-2, RRHs 30 и 20-2 UE согласно второму варианту осуществления изобретения. Далее, описывается принцип функционирования системы связи, которая включает в себя eNodeB 10-2, RRHs 30 и UE 20-2, со ссылкой на фиг.19.
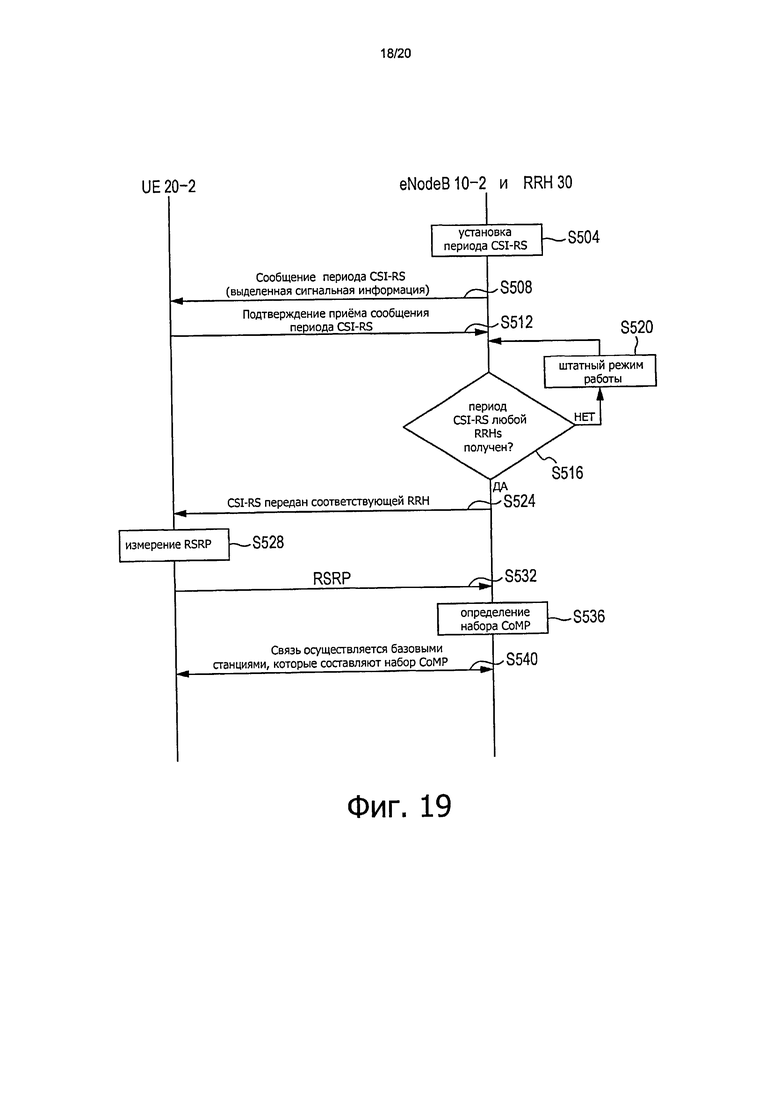
Фиг.19 представляет собой блок-схему алгоритма, иллюстрирующую принцип функционирования системы связи. Как показано на фиг.19, когда блок 162 удержания установки периода CSI-RS eNodeB 10-2 сначала устанавливает период вставки CSI-RS для каждого из RRHs 30 (S504), то eNodeB 10-2 направляет информацию на UE 20-2, которая указывает период вставки CSI-RS выделением сигнальной информации (S508). Если информация, которая указывает период вставки CSI-RS, получена, то UE 20-2 передает подтверждение получения на eNodeB 10-2 (S512).
После этого eNodeB 10-2 и RRHs 30 работают в штатном режиме, как обычно, до тех пор, пока не поступает информация о периоде вставки CSI-RS (S516, S520). Когда поступает информация о периоде вставки CSI-RS, CSI-RS передается только RRH 30, для которых установлен период вставки (S524).
С другой стороны, UE 20-2 измеряет RSRP для периода вставки CSI-RS на основании информации, полученной на этапах S508 (S528). Затем UE 20-2 передает результат измерения RSRP в eNodeB 10-2 (S532).
После этого eNodeB 10-2 определяет подходящий набор СоМР для UE 20-2 на основании RSRP каждого RRHs 30 или RSRP каждой группы RRHs 30, когда RSRP каждого из 30 RRHs или RSRP каждой группы RRHs 30 полностью собраны (S536). ENodeB 10-2 и RRHs 30, которые составляют определенный набор СоМР, осуществляют СоМР связь с UE 20-2 (S540). В частности, eNodeB 10-2 поставляет сигнал нисходящей линии связи на RRH 30, который составляет определенный набор СоМР и RRH 30, что составляет набор СоМР, передает поданный сигнал нисходящей линии связи на UE 20-2 с участием eNodeB 10-2. Дополнительно, если eNodeB 10-2 подает сигнал нисходящей линии связи в RRH 30, который составляет набор СоМР, как указано выше, сигнал нисходящей линии связи передается соответствующим RRH 30, так что СоМР связь может быть обеспечена. Соответственно, нет необходимости направлять сообщение в RRH 30 относительно определенного набора СоМР.
Как описано выше, в соответствии со вторым вариантом осуществления настоящего изобретения RSRP может быть измерено в UE 20-2 каждой из RRHs 30 даже в ситуации, в которой каждый из RRHs 30 передает тот же самый CSI-RS. Таким образом, eNodeB 10-2 может определить набор СоМР, который подходит для UE 20-2, на основании RSRP каждого из RRHs 30 в UE 20-2.
3-5. Первый вариант модификации
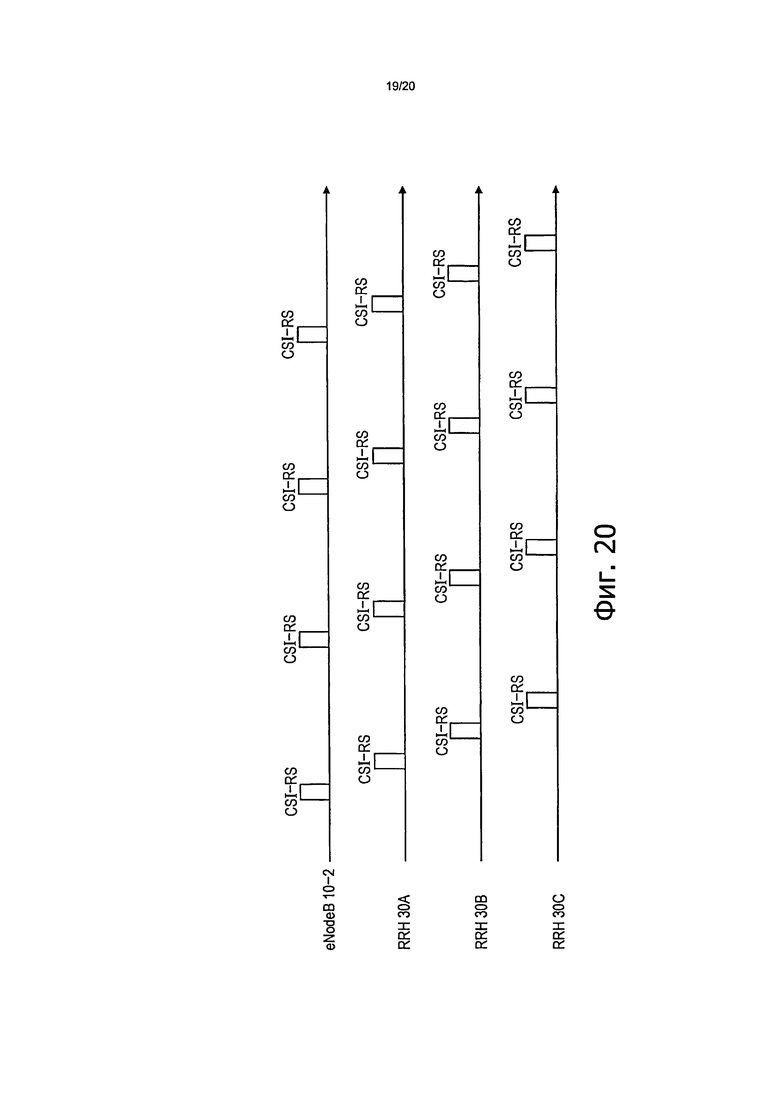
Хотя пример, в котором блок 162 удержания установки периода CSI-RS устанавливает период вставки CSI-RS для различных RRHs 30 в разных временных фреймах, был описан со ссылкой на фиг.16, но этот вариант осуществления не ограничивается данным примером. Например, блок 162 удержания установки периода CSI-RS может установить различные периоды вставки CSI -RS для различных RRHs 30 в фрейме, который перекрывается, как показано на фиг.20.
В этом случае UE 20-2 может сообщать взаимосвязанные результаты измерения RSRP и периоды измерений RSRP в eNodeB 10-2 таким образом, что eNodeB 10-2 может различать, какой RRH 30 направил RSRP сообщение, с которым ассоциировано UE 20-2.
Как и в первом варианте модификации, время для получения RSRP каждого из RRHs 30 может быть сокращено путем установки различных периодов вставки CSI-RS для различных RRHs 30 в перекрывающемся фрейме.
3-6. Второй вариант модификации
Кстати, технология, называемая Отключение CSI-RS, стандартизирована в REL10, учитывает тот факт, что прием CSI-RS соседней соты нарушается PDSCH или сигналом большой мощности, переданным обслуживающей базовой станцией. Отключение является технологией, которая останавливает передачу от обслуживающей базовой станции с использованием блока ресурса, соответствующего позиции, с которой передается CSI-RS соседней соты. На самом деле, считается, что передача PDSCH прекращается не только с позиции, из которой теоретически передаются смежные CSI-RS, но также и на всей позиции передачи. Короче говоря, отключение CSI-RS является технологией, которая защищает CSI-RS соседней соты от воздействия PDSCH обслуживающей базовой станции.
Поэтому в соответствии со вторым вариантом модификации RRH 30, которая является передающей станцией CSI-RS, принимаемого UE 20-2, может быть выделена с помощью способа, называемого CSI-RS + Enhanced_Muting, что улучшает качество отключения CSI-RS, как указано во втором варианте осуществления.
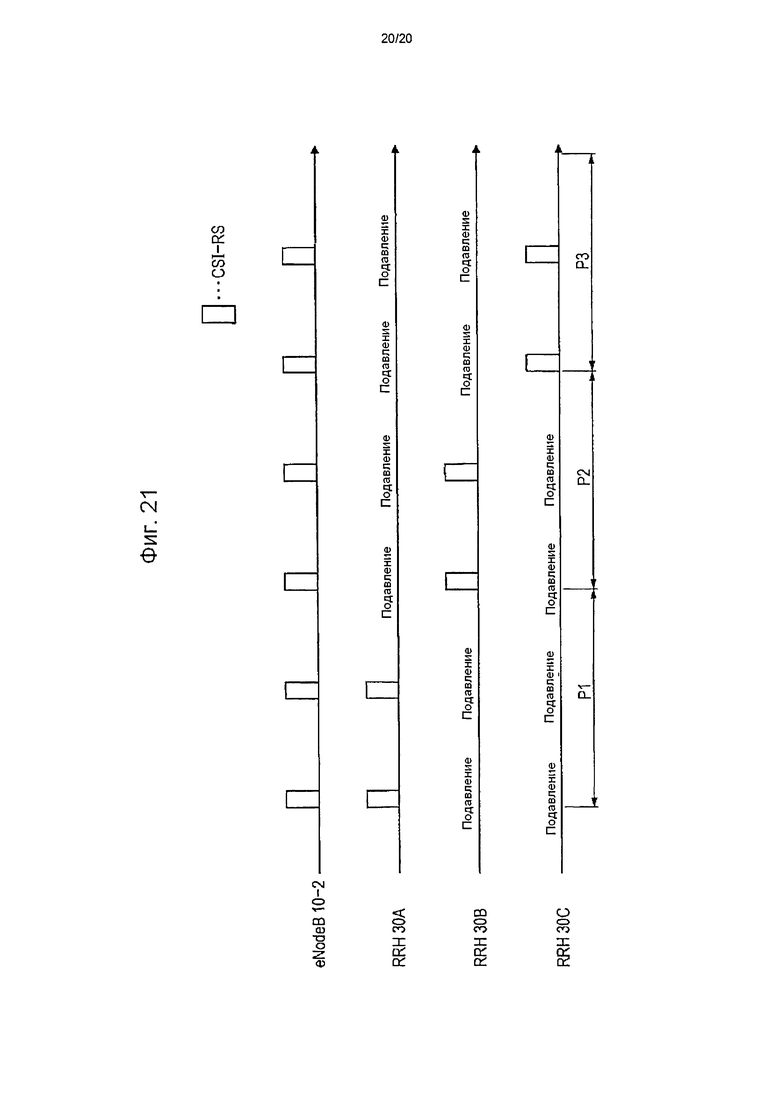
В частности, eNodeB 10-2 отключает CSI-RSs от RRHs 30 за исключением части RRHs 30 в ситуации, в которой периоды вставки CSI-RS eNodeB 10-2 и каждой из RRHs 30, являются идентичными. В результате только некоторые RRHs 30 из множества RRHs передают CSI-RS, RRH 30, которая является передающей станцией CSI-RS, принимаемого UE 20-2, может быть различима. Далее процесс функционирования будет подробно описан со ссылкой на фиг.21.
Фиг.21 представляет собой пояснительную схему, иллюстрирующую процесс CSI-RS + Enhanced_Muting согласно второму варианту модификации. Как показано на фиг.21, CSI-RS из 30 RRHs, кроме RRH 30А, отключается в течение периода Р1. Таким образом, RRH 30А может быть определена как передающая станция CSI-RS, принимаемого UE 20-2 в течение периода Р1.
Более того, поскольку CSI-RSs из RRHs 30, кроме RRH 30В, подавлены в течение периода Р2, то RRH 30В может быть определена как передающая станция CSI-RS, принимаемая UE 20-2 в течение периода Р2. Кроме того, поскольку CSI-RSs из RRHs 30, кроме RRH 30С, подавлены в течение периода Р3, то RRH 30С может быть определена как передающая станция CSI-RS, принимаемая UE 20-2 в течение периода Р3.
Во втором варианте модификации eNodeB 10-2 уведомляет UE 20-2 о периоде одного CSI-RS заранее, и UE 20-2 может измерять RSRP в течение данного периода CSI-RS и сообщать результат измерения на eNodeB 10-2. В результате eNodeB 10-2 может определить подходящий набор СоМР для UE 20-2 на основании результата измерения RSRP, полученного от UE 20-2.
<4. Заключение>
Как описано выше, в соответствии с вариантами осуществления настоящего изобретения RSRP может быть измерен в UE 20 каждого из RRHs 30 даже в ситуации, в которой каждый из RRHs 30 работает с использованием того же ID соты. Таким образом, eNodeB 10 может определить набор СоМР, который подходит для UE 20, на основании RSRP каждого из RRHs 30 в UE 20. В результате можно достичь улучшения пропускной способности системы и снижения энергопотребления, поскольку передача от RRHs 30, которые на самом деле не вносят вклад в улучшение качества приема UE 20, может не осуществляться.
Хотя предпочтительные варианты осуществления настоящего изобретения были описаны подробно со ссылкой на прилагаемые чертежи, технический объем настоящего изобретения не ограничивается данными примерами. Специалистам в области техники очевидны различные модификации, в связи с чем подразумевается, что настоящее изобретение не ограничивается изложенными вариантами его осуществления и что возможны отклонения от них в пределах существа и объема изобретения.
Например, хотя примеры определения набора СоМР основаны на результате измерения RSRP в качестве опорного сигнала, который измеряется UE 20, были описаны выше, технический объем настоящего изобретения не ограничивается данными примерами. В качестве модификации UE 20 может направлять сигнал обратной связи, который указывает на параметр, характеризующей качество приема, такой как частота возникновения ошибки сигнала, посланного каждой из RRHs 30 в eNodeB 10, и eNodeB 10 может определить набор СоМР на основании данного сигнала.
Более того, каждый этап обработки, выполняемой eNodeB 10 и UE 20, согласно данному описанию, не обязательно осуществляется в порядке, описанном в алгоритме последовательности выполнения операций. Например, каждый этап обработки eNodeB 10 и UE 20 может быть осуществлен в ином порядке, чем указано в алгоритме или могут обрабатываться параллельно.
Более того, второй вариант модификации второго варианта осуществления был описан с помощью примера, в котором RSRPs соответствует соответствующим комбинациям RRHs 30, полученным с помощью отключения CSI-RS, но использованные сигналы не ограничиваются CSI-RS. Например, механизм, аналогичный вышеописанному механизму, может быть обеспечен путем подготовки RS кроме CSI-RS, или новым RS. Особенно, когда множество RRHs 30 (или множество eNodeBs 10) посылает RS с использованием тех же элементов ресурса, RSRPs, которые соответствуют соответствующим комбинациям, могут быть получены с использованием того же механизма, как и настоящая технология.
Кроме того, хотя набор СоМР определяется с помощью оценки полезного сигнала и оценки помехи сигнала, но способ получения этих оценок не был достаточно изучен. Более того, величина оценки значения помех в среде СоМР может быть использована не только для определения набора СоМР, но также как информация для управления другими помехами, такими как ICIC (межсотовая координация помех) LTE релиз 8. Соответственно, оценка величины помех каждого eNodeB также становится важным параметром.
Таким образом, технологии согласно настоящему изобретению используются не только для получения желаемого RSRP, но также с целью получения информации о величине интенсивности помехи. То есть в соответствии с технологией настоящего изобретения величина компоненты интерференции, вызванная работой базовых станций, таких как RRHs 30 или eNodeBs 10, которые имеют тот же самый ID соты, может быть получена для каждой из различных комбинаций базовых станций. Это реализуется, например, таким образом, что детектор 130 UL сигнала eNodeB 10 получает информацию результата обнаружения компоненты интерференции, который получают из сигнала восходящей линии посредством измерения RS в UE 20, и блок 170 удержания RSRP хранит информацию о результате обнаружения компоненты интерференции. Конкретный способ получения компоненты интерференции в каждом из UE 20 выглядит следующим образом: например, корреляция с сигналом приема осуществляется с помощью RS (опорный сигнал) каждого из eNodeBs 10 как известный сигнал и значение помехи каждого eNodeB 10 может быть получена с помощью величины корреляции. Можно сказать, что способ получения величины этой компоненты помехи и способ получения величины желаемой компоненты среди сигналов приема одинаковы.
Более того, возможно обеспечить компьютерную программу, которая управляет аппаратурой, встроенной в eNodeB 10 и UE 20, такой как CPU, ROM и RAM, для выполнения тех же функций, что и у соответствующих компонентов eNodeB 10 и UE 20, которые были описаны выше. Кроме того, обеспечивается носитель данных, который хранит компьютерную программу.
Более того, следующие конфигурации также входят в технический объем настоящего изобретения.
Устройство связи согласно варианту осуществления, содержащее
приемник для приема информации, указывающей момент времени, в котором заданный сигнал передается передающей базовой станцией из множества базовых станций, имеющих одинаковый ID соты, при этом
указанный приемник выполнен с возможностью определения, что указанный заданный сигнал передан передающей базовой станцией, на основании времени приема упомянутым приемником.
Согласно одному аспекту варианта осуществления устройство связи дополнительно содержит
передатчик, выполненный с возможностью передачи сигнала результатов измерений, осуществленных указанным приемником, указанного заданного сигнала так, что подмножество из упомянутого множества базовых станций назначены для осуществления предстоящей связи с указанным устройством связи на основании указанных результатов измерений.
Согласно другому аспекту
приемник выполнен с возможностью приема указанного сигнала от подмножества упомянутого множества базовых станций в области данных заданного субфрейма, а
другие базовые станции из множества базовых станций не передают упомянутый заданный сигнал в упомянутом заданном субфрейме, при этом приемник выполнен с возможностью различения является ли заданный сигнал сигналом от одного из подмножества упомянутого множества базовых станций или других базовых станций.
Согласно другому аспекту
заданный субфрейм является практически пустым субфреймом, содержащим заданный сигнал.
Согласно другому аспекту
заданный субфрейм расположен в различных соответствующих временных интервалах для различных базовых станций из множества базовых станций.
Согласно другому аспекту
приемник выполнен с возможностью измерения мощности принимаемого сигнала упомянутого заданного сигнала для каждой из множества базовых станций.
Согласно другому аспекту
упомянутый передатчик выполнен с возможностью передачи указания об упомянутой мощности принимаемого сигнала на передающую базовую станцию для содействия в установлении подмножества упомянутого множества базовых станций.
Согласно другому аспекту
приемник выполнен с возможностью определения величины интерференционной составляющей в качестве области упомянутого результата измерения.
Устройство связи согласно другому варианту осуществления содержит
устройство управления связью, содержащее блок установки, выполненный с возможностью установки периода времени, при котором заданный сигнал передается только некоторыми базовыми станциями из множества базовых станций, имеющих одинаковый ID соты, при этом оборудование пользователя выполнено с возможностью определения того, что заданный сигнал передан передающей базовой станцией на основании времени приема оборудованием пользователя.
Согласно одному аспекту варианта осуществления устройство дополнительно содержит
беспроводной блок обработки, выполненный с возможностью приема результата измерений упомянутого заданного сигнала от оборудования пользователя в качестве принятого упомянутого оборудования пользователя и назначения подмножества из упомянутого множества базовых станций, имеющих одинаковый ID соты, для обеспечения предстоящей связи с оборудованием пользователя.
Согласно другому аспекту
устройство управления связью выполнено с возможностью установки формата упомянутого заданного сигнала, содержащегося в составе заданного субфрейма, переданного от подмножества упомянутого множества базовых станций, имеющих одинаковый ID соты.
Согласно другому аспекту
устройство управления связью выполнено с возможностью установки позиций упомянутого заданного субфрейма в качестве практически чистого субфрейма, содержащего заданный сигнал.
Согласно другому аспекту
заданный субфрейм располагается в различных соответствующих временных интервалах для различных базовых станций из множества базовых станций.
Согласно другому аспекту
беспроводной блок обработки выполнен с возможностью приема сигнала от оборудования пользователя, содержащего информацию измерения мощности принятого сигнала, осуществляемого упомянутым оборудованием пользователя для упомянутого заданного сигнала, передаваемого соответствующим множеством базовых станций.
Согласно другому аспекту
упомянутый беспроводной блок обработки принимает указание об упомянутой мощности принимаемого сигнала для содействия управляющему устройству связи в установке подмножества упомянутого множества базовых станций в сочетании с количеством субфреймов упомянутого заданного сигнала.
Согласно другому аспекту
беспроводной блок обработки выполнен с возможностью приема помеховой составляющей в качестве части упомянутого результата измерения.
В соответствии с вариантом осуществления обеспечивается способ, при этом способ содержит этапы, на которых
принимают по каналу беспроводной связи с помощью оборудования пользователя, информацию, указывающую период времени для осуществления передачи заданного сигнала, передающей базовой станцией из множества базовых станций, имеющих одинаковый ID соты; и
определяют, что упомянутый заданный сигнал передан передающей базовой станцией на основании периода времени приема упомянутым оборудованием пользователя.
Согласно одному аспекту варианта осуществления способ дополнительно содержит этап, на котором
передают информационный сигнал о результатах измерений, осуществленных упомянутым приемником упомянутого заданного сигнала, так что подмножество из упомянутого множества базовых станций назначается для осуществления предстоящей связи с упомянутым устройством связи на основании упомянутых результатов измерений.
Согласно другому аспекту
этап приема содержит подэтап, на котором принимают заданный сигнал от подмножества упомянутого множества базовых станций в области данных заданного субфрейма, при этом отсутствует передача другими базовыми станциями из множества базовых станций, упомянутого заданного сигнала в упомянутом заданном субфрейме, так что приемник выполнен с возможностью различения, является ли заданный сигнал сигналом одного из подмножества упомянутого множества базовых станций или сигналом, передаваемым другими базовыми станциями.
Согласно другому аспекту
заданный субфрейм является практически бланковым субфреймом, который включает в себя заданный сигнал.
Согласно другому аспекту
заданный субфрейм расположен в различных соответствующих временных интервалах для различных базовых станций упомянутого множества базовых станций.
Согласно другому аспекту
этап приема содержит подэтап, на котором осуществляют измерение мощности принимаемого сигнала упомянутого заданного сигнала для каждой из множества базовых станций.
Согласно другому аспекту
этап передачи содержит подэтап, на котором передают информационный сигнал об упомянутой мощности принимаемого сигнала на передающие базовые станции для содействия в определении подмножества упомянутого множества базовых станций.
Согласно другому аспекту
этап приема содержит подэтап, на котором осуществляют определение помеховой составляющей, в качестве части упомянутого результата измерения.
Способ согласно другому варианту осуществления способ содержит этапы, на которых
устанавливают период времени для передачи заданного сигнала только некоторыми базовыми станциями из множества базовых станций, имеющих одинаковый ID соты; и
передают упомянутый заданный сигнал на оборудование пользователя так, что оборудование пользователя выполнено с возможностью определения на основании периода времени приема оборудованием пользователя, что заданный сигнал передан передающей базовой станцией.
Согласно одному аспекту способ дополнительно содержит этапы, на которых
принимают результат измерения от оборудования пользователя упомянутого заданного сигнала в качестве принятого оборудованием пользователя и назначают подмножество базовых станций из упомянутого множества базовых станций, имеющих одинаковый ID соты так, чтобы обеспечить предстоящую связь с оборудованием пользователя на основании упомянутого результата измерения.
Согласно другому аспекту
устанавливают формат упомянутого заданного сигнала, содержащегося в заданном субфрейме, переданном подмножеством базовых станций из упомянутого множества базовых станций, имеющих одинаковый ID соты.
Согласно другому аспекту
этап установки содержит подэтап, на котором устанавливают упомянутый заданный субфрейм в качестве практически пустого субфрейма, содержащего заданный сигнал.
Согласно другому аспекту
заданный субфрейм расположен в различных соответствующих временных интервалах для различных базовых станций из упомянутого множества базовых станций.
Согласно другому аспекту
этап приема сигнала от оборудования пользователя содержит подэтап, на котором измеряют мощность принимаемого сигнала упомянутого заданного сигнала от множества базовых станций упомянутым оборудованием пользователя.
Согласно другому аспекту
этап приема содержит подэтап, на котором принимают указание об упомянутой мощности принимаемого сигнала для содействия в определении подмножества упомянутого множества базовых станций в сочетании с номером субфрейма упомянутого заданного сигнала.
Согласно другому аспекту
этап приема содержит подэтап, на котором принимают помеховую составляющую в качестве части упомянутого результата измерения.
Список ссылочных позиций
10, 10-1, 10-2 - eNodeB
12 - Базовая сеть
20, 20-1, 20-2 - UE
30 - RRH
104, 204, 304 антенная группа
110, 210, 310 - беспроводной блок обработки
120, 220 - DA/AD конвертер
130 - детектор UL сигнала
140 - планировщик
150 - генератор DL сигнала
160 - блок удержания установки ABS
162 - блок удержания установки CSI-RS
170, 172 - блок удержания RSRP
180, 182 - блок определения набора СоМР
230 - детектор сигнала DL
240 - генератор сигнала UL
250 - блок удержания установки позиции ABS
252 - блок удержания периода CSI-RS
Изобретение относится к системам связи. Технический результат заключается в улучшении качества отключения опорного сигнала информации о состоянии канала (CSI-RS). Устройство связи и способ обеспечивают возможность для множества передающих базовых станций, имеющих одинаковый ID соты, передавать заданный сигнал на оборудование пользователя, что позволяет оборудованию пользователя впоследствии устанавливать связь с наиболее эффективным подмножеством упомянутого множества передающих базовых станций для конкретного оборудования пользователя. Оборудование пользователя принимает заданный сигнал от всех базовых станций и затем обеспечивает обратную связь для информирования о качестве приема сигнала. На основании данной обратной связи формат сообщения создается таким образом, чтобы информировать оборудование пользователя о том, какие базовые станции включены в состав подмножества базовых станций, которые будут использоваться для осуществления связи с оборудованием пользователя. 3 н. и 4 з.п. ф-лы, 21 ил. 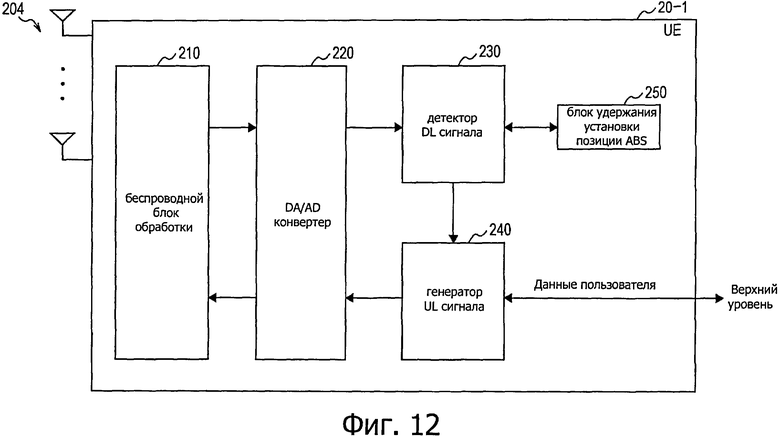
1. Устройство связи, содержащее:
схему, выполненную с возможностью:
осуществления связи с множеством базовых станций посредством технологии Скоординированной Многоточечной передачи и приема (СоМР), при этом указанные базовые станции содержат первую базовую станцию и вторую базовую станцию;
приема от первой базовой станции информации конфигурации, указывающей первый период первого опорного ресурса;
приема второго опорного ресурса от второй базовой станции в течение первого периода; при этом
указанный первый опорный ресурс соответствует подавленной мощности опорного сигнала информации о состоянии канала (CSI-RS), а второй опорный ресурс соответствует неподавленной мощности CSI-RS.
2. Устройство связи по п. 1, в котором
вторая базовая станция соответствует дистанционному радиоузлу (RRH).
3. Устройство связи по п. 1, в котором указанные множество базовых станций имеют одинаковый ID соты.
4. Первая базовая станция, содержащая:
схему, выполненную с возможностью:
осуществления связи с устройством связи совместно с одной или более базовыми станциями посредством технологии Скоординированной Многоточечной передачи и приема (СоМР), при этом указанные базовые станции содержат вторую базовую станцию;
передачи устройству связи информации конфигурации, указывающей первый период первого опорного ресурса, при этом первый период предназначен для приема второго опорного ресурса от указанной второй базовой станции; при этом
указанный первый опорный ресурс соответствует подавленной мощности опорного сигнала информации о состоянии канала (CSI-RS), а второй опорный ресурс соответствует неподавленной мощности CSI-RS.
5. Первая базовая станция по п. 4, в которой вторая базовая станция соответствует дистанционному радиоузлу (RRH).
6. Первая базовая станция по п. 4, в которой указанная первая базовая станция и указанные одна или более базовые станции имеют одинаковый ID соты.
7. Способ беспроводной связи, содержащий этапы, на которых:
осуществляют связь с множеством базовых станций посредством технологии Скоординированной Многоточечной передачи и приема (СоМР), при этом указанные базовые станции содержат первую базовую станцию и вторую базовую станцию;
принимают от первой базовой станции информацию конфигурации, указывающую первый период первого опорного ресурса; и
принимают второй опорный ресурс от второй базовой станции в течение первого периода; при этом
указанный первый опорный ресурс соответствует подавленной мощности опорного сигнала информации о состоянии канала (CSI-RS), а второй опорный ресурс соответствует неподавленной мощности CSI-RS.
| US 2011034175 A1, 10.02.2011 | |||
| WO 2011044530 A2, 14.04.2011 | |||
| WO 2011010904 A2, 27.01.2011 | |||
| СИНХРОНИЗАЦИЯ ПО ВРЕМЕНИ, ПОДДЕРЖИВАЕМАЯ ПОДВИЖНОЙ СТАНЦИЕЙ, В СИСТЕМЕ СВЯЗИ CDMA | 1998 |
|
RU2231224C2 |

