ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу укладки трубопровода на дно водоема. Более конкретно, способ, согласно настоящему изобретению, содержит стадии сооружения трубопровода на трубоукладочном судне, укладку трубопровода в водоем, и предназначен для минимизации любого ущерба, вызванного разрывом трубопровода по мере того, как его укладывают.
УРОВЕНЬ ТЕХНИКИ
Трубопроводы сооружаются и укладываются с использованием различных типов трубоукладочных судов, в зависимости от глубины дна. Один тип судна, пригодный для относительно неглубокого дна, предназначен для состыковки секций трубы на, по существу, в горизонтальной сборочной линии и снабжен спусковой аппарелью для так называемой S-образной укладки труб - названной по форме, которую трубопровод принимает между трубоукладочным судном и дном. Другой тип судна, пригодный для глубокого дна, предназначен для состыковки секций трубы на, по существу, вертикальной сборочной линии и снабжен спусковой аппарелью для так называемой J-образной укладки труб - также названной по форме, которую трубопровод принимает между трубоукладочным судном и дном.
В обоих случаях часть трубопровода между трубоукладочным судном и дном подвергается воздействию изгибающих напряжений, т.е. образует один изгиб при использовании системы J-образной укладки труб и два изгиба при использовании системы S-образной укладки труб. До тех пор, пока он не введен в эксплуатацию, трубопровод, очевидно, пуст, так что внешнее давление, особенно на большой глубине, гораздо выше, чем внутри трубопровода. Трубопроводы могут укладываться на глубине до 3000 метров ниже уровня моря, поэтому крутые изгибы в сочетании с разницей между внешним и внутренним давлением и могут разрушить и разорвать трубопровод, что приведет к заполнению водой, которое будет иметь серьезные последствия. В частности, по меньшей мере, части трубопровода будет нанесен непоправимый ущерб и ее необходимо будет заменить; и очистка заполненного водой трубопровода является дорогой и занимающей очень много времени работой.
Одним известным решением проблемы является вставка и перемещение заглушки вдоль трубопровода, чтобы предотвратить заполнение водой части трубопровода, расположенной выше от заглушки по мере того, как трубопровод опускается на дно.
Заглушку перемещают вдоль трубопровода, используя различные способы. Например, в документах США 4498811 и WO 03/042594, она протягивается вдоль с помощью кабеля, вставленного внутрь трубопровода, и управляется лебедкой на трубоукладочном судне. В другом способе, известном как поршневание, заглушка выдувается вдоль сжатым воздухом, выработанным на насосной станции, предпочтительно расположенной на одном конце трубопровода. В документе WO 2007/040403, заглушка перемещается вдоль трубопровода благодаря разности давления выше и ниже от заглушки. В другом способе заглушка связана с самоходной тележкой, но это требует независимого источника питания, как описано в документах США 3837214 и 3978678.
Каждый из приведенных выше способов закупоривания имеет плюсы и минусы с точки зрения точного позиционирования заглушки, рабочий диапазон, стоимость, производства и установки.
Кроме того, способы, в вышеуказанных документах, не являются эффективными для того, чтобы предотвратить распространение разрушения трубопровода и таким образом подвергнуть опасности целостность значительной части трубопровода и заглушку и уплотнительную способность заглушки.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Объектом настоящего изобретения является предоставление способа укладки трубопровода на дно водоема, предназначенного для минимизации ущерба, вызываемого местным разрывом трубопровода по мере того, как его укладывают.
Согласно настоящему изобретению предлагается способ укладки трубопровода на дно водоема, способ, содержащий стадии сооружения трубопровода на трубоукладочном судне, трубопровода, содержащего секции трубы заданной толщины и секции трубы с большей толщиной, распределенные вдоль трубопровода; движение вперед трубоукладочного судна и укладку трубопровода в водоем по мере того, как трубопровод сооружается; и продвижение вперед ходового механизма, предназначенного для того, чтобы закупорить трубопровод, внутри трубопровода, уложенного на дно водоема; перемещение ходового механизма, связанного с положением секций трубы с большей толщиной и точкой касания трубопровода с дном водоема.
В настоящем изобретении, секции трубы с большей толщиной, распределенные вдоль трубопровода, предотвращают распространение любого разрушения трубопровода; ходовой механизм предотвращает заполнение водой трубопровода; и положение ходового механизма выбирается в соответствии с положением секций трубы с большей толщиной и точки касания трубопровода, для защиты максимально возможной секции трубопровода от разрушения и заполнения водой, и в то же время для защиты ходового механизма.
Способ, по сути, предусматривает определение положения ходового механизма внутри трубопровода и положения секции трубы с большей толщиной, ближайшей к точке касания, по отношению к точке касания.
В предпочтительном варианте осуществления изобретения, способ предусматривает позиционирование ходового механизма непосредственно перед последней секцией трубы с большей толщиной, уложенной на дно водоема.
Другими словами, ходовой механизм движется вперед этапами, каждый из которых, по существу, равен расстоянию между двумя последовательными секциями трубы с большей толщиной. Секции трубы с большей толщиной предпочтительно находятся на равных расстояниях друг от друга, и ходовой механизм продвигается в режиме «стоп/ход».
В предпочтительном варианте осуществления способ предусматривает автоматическое закупоривание трубопровода посредством ходового механизма в случае, если трубопровод заполняется водой по мере того, как его укладывают. Таким образом, трубопровод будет закупорен только, когда это необходимо, что имеет преимущество в предотвращении сцепления ходового механизма с трубопроводом и затруднения снова сдвинуть его.
В предпочтительном варианте осуществления способ предусматривает управление ходовым механизмом с помощью электромагнитных волн, направленных в трубопровод, между ходовым механизмом и блоком управления на борту трубоукладочного судна.
В предпочтительном варианте осуществления изобретения, этап продвижения вперед ходового механизма содержит подачу газа под давлением в трубопровод, от низконапорной насосной станции, расположенной на конце трубопровода, противоположном концу трубопровода на борту трубоукладочного судна, для того, чтобы толкнуть ходовой механизм вперед.
Низконапорной насосной станции достаточно для перемещения ходового механизма вперед, и она относительно дешевая по сравнению насосной станцией высокого давления, обычно используемой для тестирования трубопроводов. Тесты показывают, что давления 0,5 бар достаточно для того, чтобы продвинуть вперед ходовой механизм, и давления 1 бар достаточно для того, чтобы преодолеть трение покоя, чтобы получить стационарное движение ходового механизма.
В предпочтительном варианте осуществления изобретения способ предусматривает продвижение вперед и торможение ходового механизма с помощью самоходного модуля на самом ходовом механизме. С помощью самоходного модуля, ходовой механизм может продвигаться вперед и тормозиться с помощью либо самоходного модуля самого по себе, без насосной станции, либо с помощью комбинирования этих двух. Комбинированный образ действий является особенно преимущественным при запуске или остановке ходового механизма. При запуске трение покоя ходового механизма преодолевается самоходным модулем, поэтому может быть установлена насосная станция для производства относительно низкого давления внутри трубопровода. И при остановке или движении вперед, тормоз самоходного модуля обеспечивает точное позиционирование ходового механизма по отношению к секции трубы с большей толщиной и управление скоростью перемещения ходового механизма.
Комбинированный образ действий может ограничиваться приведением в движение и остановкой ходового механизма, поэтому потребление электроэнергии самоходного модуля является относительно низким.
В предпочтительном варианте осуществления изобретения, способ предусматривает рекуперацию кинетической энергии при торможении, преобразование кинетической энергии в электрическую энергию, накапливание электрической энергии и преобразование электрической мощности обратно в кинетическую энергию для того, чтобы привести в действие ходовой механизм. При рекуперации энергии можно использовать относительно компактную и легкую аккумуляторную батарею.
Настоящее изобретение также относится к системе укладки трубопровода на дно водоема, предназначенной для минимизации ущерба, вызываемого разрывом трубопровода по мере того, как его укладывают.
Согласно настоящему изобретению предлагается система укладки трубопровода на дно водоема содержит трубоукладочное судно для сооружения трубопровода, содержащего секции трубы заданной толщины и секции трубы с большей толщиной, распределенные вдоль трубопровода; спусковую аппарель для укладки трубопровода в водоем по мере того, как трубоукладочное судно перемещается вперед; ходового механизма, предназначенного для продвижения внутри трубопровода и для закупоривания трубопровода в случае необходимости; и блок управления для управления перемещением ходового механизма, основываясь на положении секций трубы с большей толщиной и точки касания трубопровода с дном водоема.
Более конкретно, ходовой механизм содержит модули, выбранные из ряда модулей и соединенные последовательно друг с другом; ходовой механизм, содержащий, по меньшей мере, один модуль для продвижения вперед ходового механизма; по меньшей мере, один модуль для закупоривания трубопровода; по меньшей мере, один модуль для управления модулем для закупоривания трубопровода; по меньшей мере, один модуль, который выступает в качестве стояночного тормоза ходового механизма; и, по меньшей мере, один модуль для передачи/приема данных между ходовым механизмом и блоком управления на трубоукладочном судне.
Модульная конструкция ходового механизма делает возможными различные типы ходовых механизмов, которые формируются путем вставки или удаления модулей или с использованием нескольких модулей с той же функцией на том же ходовом механизме. Такая универсальность является особенно преимущественной с точки зрения эксплуатации и технического обслуживания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Несколько не имеющих ограничительного характера вариантов осуществления изобретения описываются в качестве примера со ссылкой на прилагаемые чертежи, на которых:
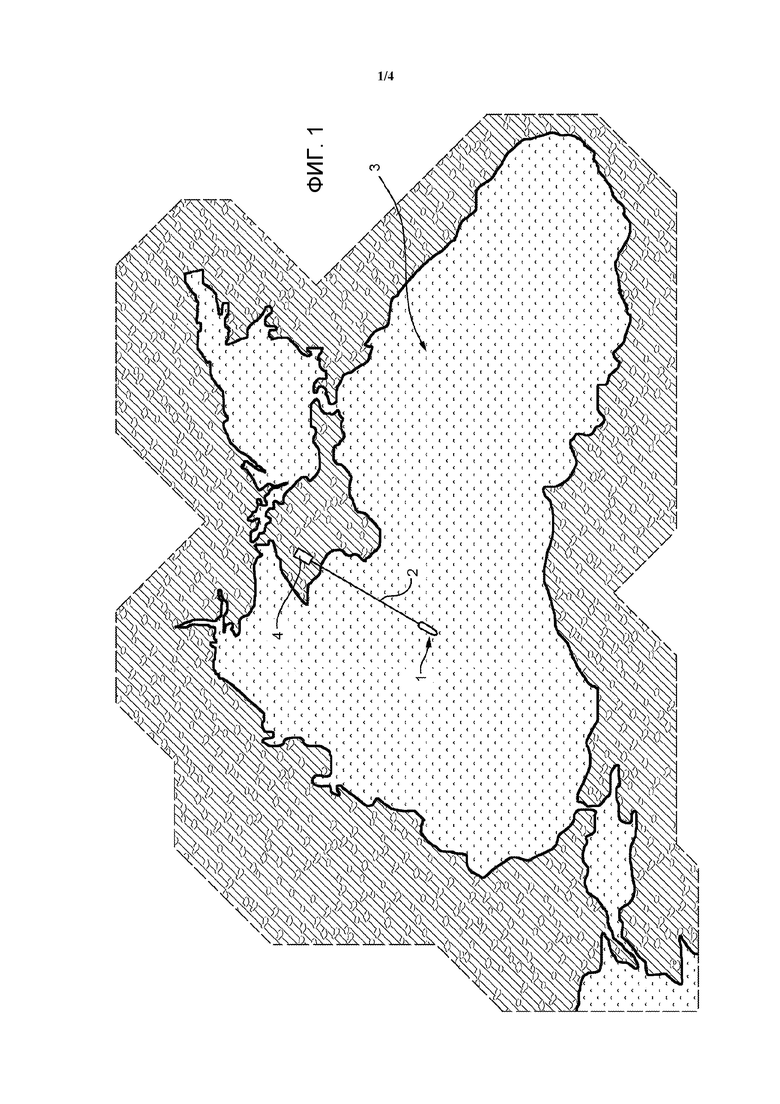
на Фигуре 1 показан вид сверху с удаленными для ясности частями трубоукладочного судна, укладывающего трубопровод в водоем;
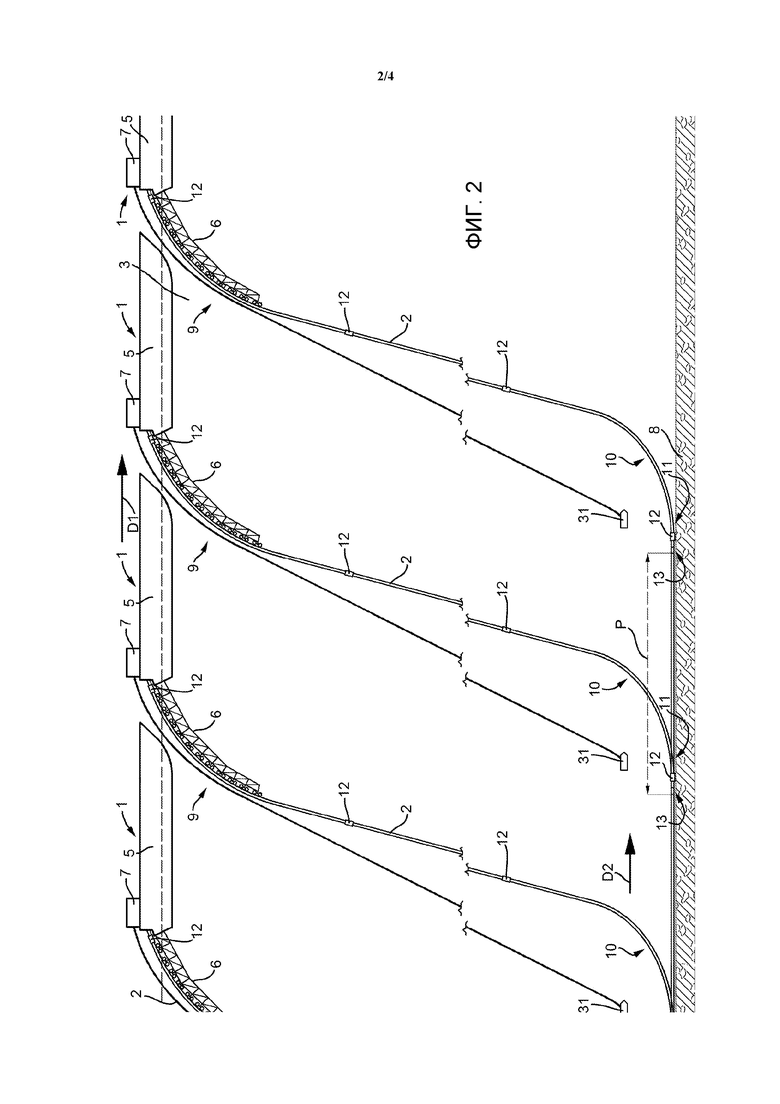
на Фигуре 2 показан вид сбоку с удаленными для ясности частями трубоукладочного судна с Фигуры 1, в последовательных положениях укладки трубопровода;
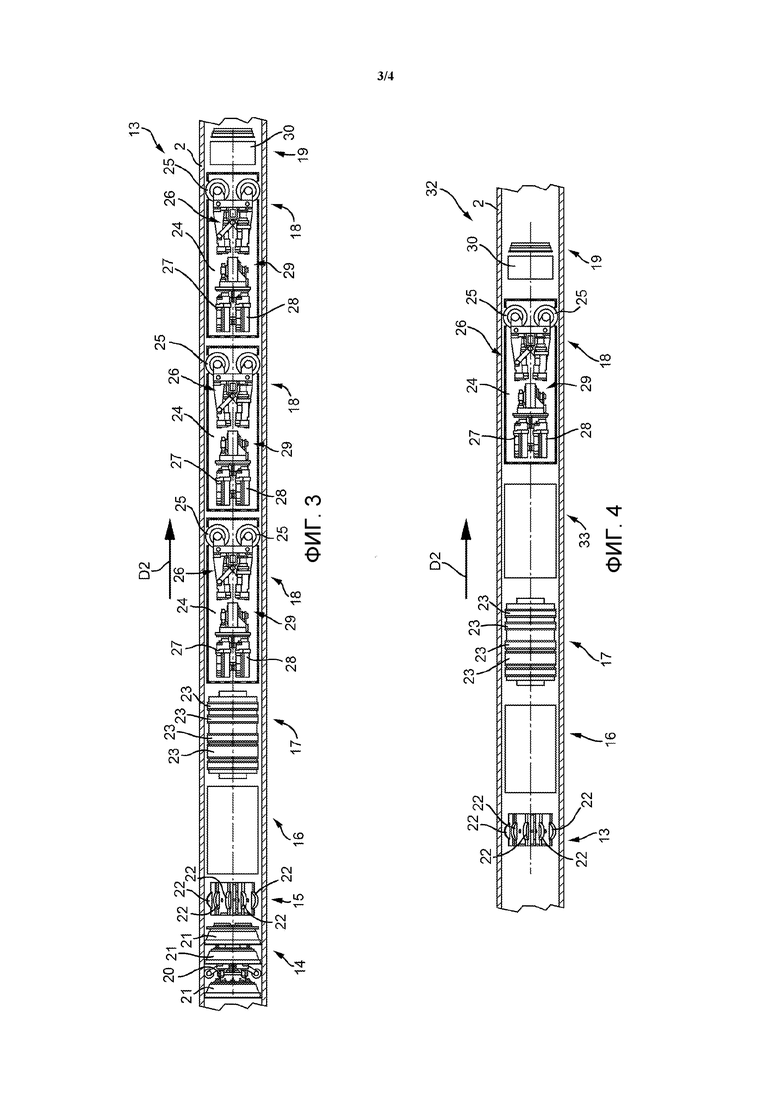
на Фигуре 3 показан вид сбоку с удаленными для ясности частями, компонента с помощью которого осуществляется способ согласно настоящему изобретению;
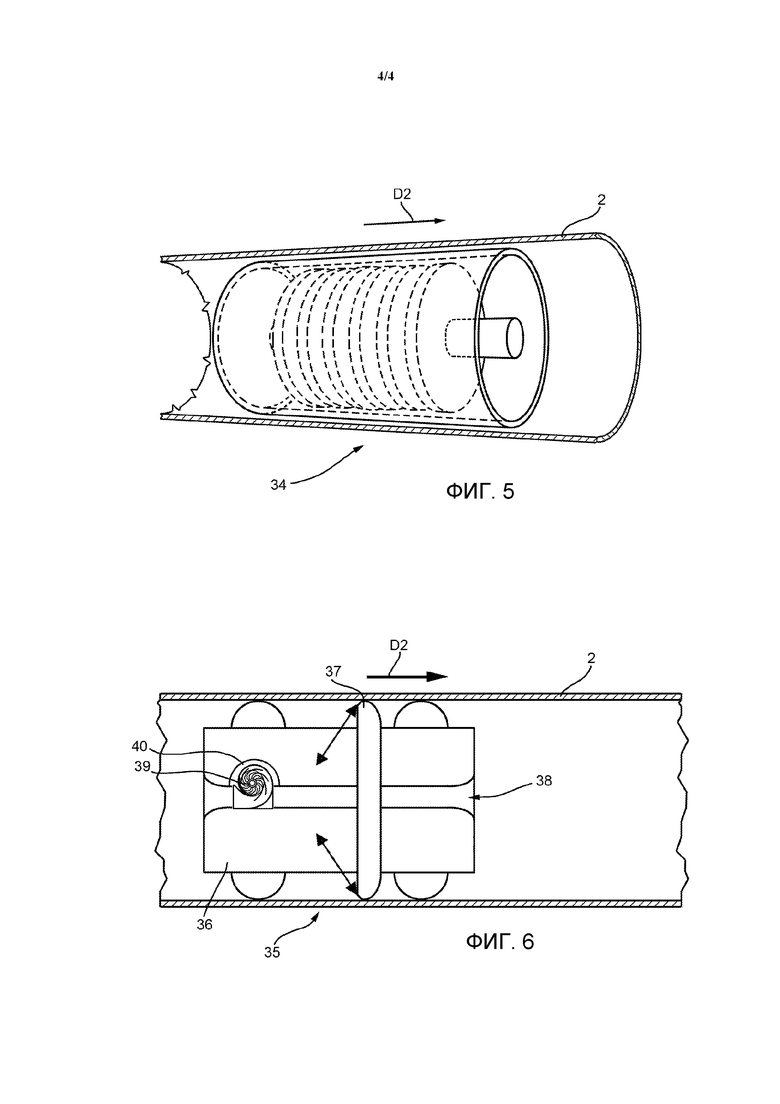
на Фигуре 4 показан вид сбоку с удаленными для ясности частями компонента альтернативного варианта осуществления с Фигуры 3;
на Фигуре 5 показан в увеличенном масштабе частично в разрезе вид в перспективе детали компонента варианта с Фигуры 3;
на Фигуре 6 показано частично в разрезе схематическое изображение детали компонента еще одного варианта с Фигуры 3.
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Под номером 1 на Фигуре 1 обозначено целиком трубоукладочное судно, укладывающее трубопровод 2 в водоеме 3. Трубопровод 2 укладывается по мере того, как он сооружается, посредством трубоукладочного судна 1, в водоем 3, и проходит между трубоукладочным судном 1 и расположенной на суше насосной станцией 4.
На фигуре 2 показано трубоукладочное судно 1 и трубопровод 2 в последовательных положениях, по мере того, как трубоукладочное судно 1 движется в направлении D1 вдоль заданного курса и трубопровод 2 сооружается по частям на борту трубоукладочного судна 1. На Фигуре 2 показано судно 1 для S-образной укладки труб, хотя настоящее изобретение также подходит для судов для J-образной укладки труб.
Трубоукладочное судно 1 показано схематически и содержит плавучее сооружение 5 поддерживающее спусковую аппарель 6, частично погруженную в водоем 3 для частичного направления трубопровода 2, сходящего от опорной конструкции 5; и блок 7 управления для управления операцией укладки.
В примере, показанном на чертежах, трубопровод 2 принимает характерную S форму между трубоукладочным судном 1 и дном 8 водоема 3, образует два изгиба 9 и 10, поддерживается посредством спусковой аппарели 6 вдоль изгиба 9 и не поддерживается вдоль изгиба 10, который находится близко к дну 8 или, скорее, точке касания 11 трубопровода 2 с дном 8. Точка касания 11 сдвигается вправо на Фигуре 2 по мере того, как трубоукладочное судно 1 движется в направлении D1.
Трубопровод 2 изготовлен из отдельных секций трубы с заданной толщиной, соединенных друг с другом и не указанных на чертежах;
и из секций 12 трубы с большей толщиной, которые более устойчивы к изгибу и разрушению, и таким образом предотвращают любое случайное распространение разрушения трубопровода 2. Секции 12 трубы с большей толщиной предпочтительно находятся на равных расстояниях друг от друга вдоль трубопровода 2, но это расстояние между ними может меняться, если необходимо, и предпочтительно составляет от 500 м и 5000 м. Трубопровод 2 заключает в себе ходовой механизм 13, предназначенный для закупоривания трубопровода 2 в случае случайного заполнения водой.
Поскольку области, которые наиболее вероятно выйдут из строя и заполнятся водой, находятся в части трубопровода 2, подвешенной между трубоукладочным судном 1 и дном 8, ходовой механизм 13 служит для предотвращения заполнения водой участка трубопровода 2, лежащего на дне 8, и вследствие этого продвигается постепенно вперед внутри трубопровода 2 в направлении D2 по мере того, как трубоукладочное судно 1 продвигается в направлении D1.
Используемые в настоящем документе термины «выше» и «ниже», по сути, относятся к направлению D2 движения ходового механизма 13. Ходовой механизм 13 перемещается вперед, основываясь на абсолютных координатах точки 11 касания и положении последней секции 12 трубы с большей толщиной, уложенной на дно 8, продвигается по этапам Р, каждый из которых по существу равен расстоянию между двумя последними секциями 12 трубы с большей толщиной, уложенной на дно 8, и останавливается непосредственно перед последней секцией 12 трубы с большей толщиной, уложенной на дно 8. Этот режим перемещения ходового механизма 13 уменьшает любой ущерб, вызванный выходом из строя или заполнением водой трубопровода 2, посредством ходового механизма 13, всегда находящегося в месте, защищенном последней секцией 12 трубы с большей толщиной, который предотвращает разрушение трубопровода 2 и таким образом ходового механизма 13.
Для лучшей реализации способа согласно изобретению, ходовой механизм 13 должен быть расположен относительно точно внутри трубопровода 2 и необходимо контролировать или, по меньшей мере, точно определять положение точки касания 11 трубопровода 2 с дном 8, положение секций 12 трубы с большей толщиной рядом с точкой касания 11 и положение ходового механизма 13.
Как показано на Фигуре 3, ходовой механизм 13 предназначен для перемещения в направлении D1 и содержит несколько по существу цилиндрических модулей 14, 15, 16, 17, 18, 19, соединенных последовательно в направлении D2. Модуль 14 известен как «черт» и содержит тележку 20; и по меньшей мере одно чашеобразное уплотнение 21, предназначенное для толкания ходового механизма 13 в направлении D2 в зависимости от давления выше модуля 14. Модуль 15 действует как стояночный тормоз, когда ходовой механизм 13 остановлен, и имеет колеса 22, которые катятся вдоль по поверхности трубопровода 2, когда ходовой механизм 13 движется, и блокируются, когда ходовой механизм 13 остановлен. Модуль 16, по существу, определяет блок управления модуля 17, который действует как заглушка и имеет надувные камеры 23, предназначенный для сцепления с внутренней поверхностью трубопровода 2. Каждый модуль 18 представляет собой самоходный модуль и содержит опорную раму 24, ведущие колеса 25, механическую коробку передач 26, электродвигатель 27, аккумуляторную батарею 28 и предпочтительно содержит устройство 29 рекуперации энергии, предназначенное для рекуперации кинетической энергии при торможении, преобразования кинетической энергию в электрическую энергию и, по меньшей мере, частично подзарядки батареи 28. Другими словами, электродвигатель 27 работает как электрогенератор при торможении.
Модуль 19 располагается в передней части ходового механизма 13 и содержит передающий/принимающий блок 30 для сигнализации о положении ходового механизма 13, заряде батареи 28 и любых аномалиях в работе, и для приема сигналов управления от трубоукладочного судна 1.
Как показано на Фигуре 2, положение точки 11 касания и укладка секций 12 трубы с большей толщиной контролируется подводным аппаратом с дистанционным управлением 31, которое способствует операции укладки непосредственно по дну 8 водоема 3.
В реальных условиях эксплуатации блок 7 управления управляет перемещением ходового механизма 13 внутри трубопровода 2, основываясь на информации, принятой от подводного аппарата с дистанционным управлением 31 и модуля 19. Более конкретно, блок 7 управления фиксирует текущее положение ходового механизма 13 и с помощью подводного аппарата с дистанционным управлением 31 контролирует продвижение точки 11 касания по мере того, как трубоукладочное судно 1 движется вперед, и укладку секции трубы 12 с большей толщиной на дно 8 водоема 3. И каждый раз, когда секцию 12 трубы с большей толщиной укладывают на дно 8, блок 7 управления дает команду ходовому механизму 13 переместиться в положение непосредственно перед и в непосредственной близости к последней уложенной секции трубы 12 с большей толщиной.
В одном из вариантов, который не показан, трубоукладочное судно оснащено гидролокатором для определения положения точки касания и секций трубы с большей толщиной.
Положение точки 11 касания и секций 12 трубы с большей толщиной может быть определено достаточно точно с использованием математической модели и в зависимости от характеристик трубопровода 2, топографии дна 8 водоема 3, курса трубоукладочного судна 1 и конфигурации спусковой аппарели 6.
В одном из вариантов осуществления подводный аппарат с дистанционным управлением 31 и модуль 19 взаимодействуют непосредственно для определения положения остановки ходового механизма 13.
Все перечисленные выше функции управления можно использовать как по отдельности, так и в сочетании одних с другими.
Под номером 32 на Фигуре 4 показан альтернативный вариант осуществления ходового механизма с Фигуры 3. Перемещение ходового механизма 32 не основано на разности давления выше и ниже по потоку, насосная станция 4 с Фигуры 1 не требуется. Ходовой механизм 32 не имеет модуля 14 (Фигура 3, и содержит модули 15, 16, 17, 18, 19, как описано выше, и модуль 33 для питания самоходного модуля 18. В отличие от ходового механизма 13 с Фигуры в 3, ходовой механизм 32 содержит только один самоходный модуль 18, который питается от модуля 33, который предпочтительно является батареей топливных элементов, способной хранить большое количество энергии, поэтому ходовой механизм 32 имеет довольно хороший рабочий диапазон.
В качестве альтернативы модулю 14 с Фигуры 3, ходовой механизм 13 может быть самоходным, использующим модуль 34 (Фигура 5) с малым лобовым сопротивлением, не предназначенным для сцепления с трубопроводом. Модуль 34, по сути, образует узкий кольцевой зазор с трубопроводом 2 и поступательное движение обеспечивается разностью давлений давления выше и ниже от модуля 34.
Под номером 352 на Фигуре 6 показан модуль электрогенератора для увеличения рабочего диапазона ходового механизма 32 с Фигуры 4, который содержит тележку 36; избирательно надувной/сдуваемый кольцевые камеры 37, окружающие тележку 36; продольную трубку 38 внутри тележки 36; турбину 39 в направлении трубки 38 и электрогенератор 40, связанный с турбиной 39.
Модуль 35, очевидно, предназначен для работы в трубопроводе 2, связанном с насосной станцией с Фигуры 1. Когда модуль 35 останавливается в заданном положении, кольцевая камера 37 надувается для того, чтобы заставить воздух по трубке 38 вращать турбину 39 и вырабатывать электроэнергию с помощью генератора 40.
Модуль 35 обеспечивает удаленное, т.е. от насосной станции, снабжение энергией ходового механизма 32 (Фигура 4), относительно легко, таким образом, позволяя уменьшить размер и вес модуля 33 (Фигура 4).
Очевидно, что изменения могут быть внесены в описанный вариант осуществления настоящего изобретения, не отходя при этом от объема прилагаемой формулы изобретения.
Группа изобретений относится к строительству подводных трубопроводов. Трубоукладочное судно (1) движется вперед и укладывает трубопровод (2) в водоем (3) по мере его сооружения. Трубопровод (2) содержит секции трубы заданной толщины и распределенные вдоль трубопровода (2) секции (12) трубы с большей толщиной, более устойчивые к изгибу и разрушению. Для закупоривания уложенного на дно водоема трубопровода (2) внутри него продвигают вперед ходовой механизм (13; 32). Перемещение ходового механизма (13; 32) осуществляют поэтапно в зависимости от положения секций (12) трубы с большей толщиной и точки (11) касания трубопровода (2) с дном (8) водоема (3). Позволяет уменьшить ущерб, вызванный разрушением или заполнением водой трубопровода (2). 2 н. и 15 з.п. ф-лы, 6 ил.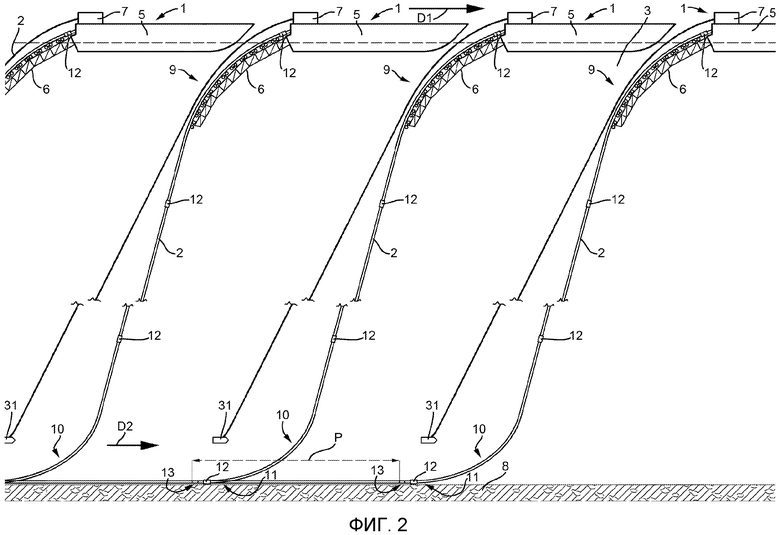
1. Способ укладки трубопровода на дно водоема, содержащий стадии, на которых: сооружают на трубоукладочном судне трубопровод (2), содержащий секции трубы заданной толщины и секции (12) трубы с большей толщиной, распределенные вдоль трубопровода (2); перемещают вперед трубоукладочное судно (1) и укладывают трубопровод (2) в водоем (3) по мере сооружения трубопровода (2); и осуществляют продвижение вперед ходового механизма (13; 32), предназначенного для закупоривания трубопровода (2), внутри трубопровода, уложенного на дно водоема; перемещают ходовой механизм (13; 32), связанный с положением секций (12) трубы с большей толщиной и точкой (11) касания трубопровода (2) с дном водоема (3).
2. Способ по п.1, содержащий стадию определения положения ходового механизма (13, 32) внутри трубопровода (2), и положения, по отношению к точке (11) касания, секции трубы (12) с большей толщиной, ближайшей к точке (11) касания.
3. Способ по п.1, содержащий этап позиционирования ходового механизма (13; 32) непосредственно перед последней секцией (12) трубы с большей толщиной, уложенной на дно (8) водоема (3).
4. Способ по п.1, содержащий этап автоматического закупоривания трубопровода (2) посредством ходового механизма (13; 32) в случае, если трубопровод (2) заполняется водой по мере того, как его укладывают.
5. Способ по п.1, содержащий этап управления ходовым механизмом (13, 32) с помощью электромагнитных волн, направленных в трубопровод (2), между ходовым механизмом (13; 32) и блоком (7) управления на борту трубоукладочного судна (1).
6. Способ по п.1, в котором этап продвижения вперед ходового механизма (13; 32) содержит подачу газа под давлением в трубопровод (2), от низконапорной насосной станции (4), расположенной на конце трубопровода (2), противоположном концу трубопровода на борту трубоукладочного судна (1).
7. Способ по п.1, содержащий этап продвижения вперед и торможения ходового механизма (13; 32) с помощью самоходного модуля (18) на самом ходовом механизме (13, 32).
8. Способ по п.1, содержащий этап рекуперации кинетической энергии при торможении ходового механизма (13) и рекуперации кинетической энергии в электрическую энергию для того, чтобы привести в действие ходовой механизм (13).
9. Система укладки трубопровода на дно водоема, содержащая трубоукладочное судно для сооружения трубопровода, содержащего секции трубы заданной толщины и секции (12) трубы с большей толщиной, распределенные вдоль трубопровода (2); спусковую аппарель (6) для укладки трубопровода (2) в водоем (3) по мере того, как трубоукладочное судно перемещается вперед; ходовой механизм (13; 32), предназначенный для продвижения внутри трубопровода (2) и для закупоривания трубопровода (2) в случае необходимости; и блок (7) управления для управления перемещением ходового механизма (13; 32), основываясь на положении секций (12) трубы с большей толщиной и точки (11) касания трубопровода (2) с дном (8) водоема (3).
10. Система по п.9, в которой блок (7) управления выполнен с возможностью определения положения ходового механизма (13, 32) внутри трубопровода (2) и положения каждой секции (12) трубы с большей толщиной по отношению к точке (11) касания.
11. Система по п.10, содержащая подводный аппарат с дистанционным управлением (31) для определения положения точки (11) касания и положения секции (12) трубы с большей толщиной, ближайшей к точке (11) касания.
12. Система по п.9, в которой ходовой механизм (13, 32) содержит модули, выбранные из ряда модулей (14, 15, 16, 17, 18, 19, 34, 35) и соединенные последовательно друг с другом; ходовой механизм (13, 32), содержащий, по меньшей мере, один модуль (14, 34, 18) для продвижения вперед ходового механизма (13, 32); по меньшей мере, один модуль (17) для закупоривания трубопровода (2); по меньшей мере, один модуль (16) для управления модулем (17) для закупоривания трубопровода (2); по меньшей мере, один модуль (15), который выступает в качестве стояночного тормоза ходового механизма (13, 32); и, по меньшей мере, один модуль (19) для передачи/приема данных между ходовым механизмом (13, 32) и блоком (7) управления на трубоукладочном судне (1).
13. Система по п.12, в которой ходовой механизм (13) содержит модуль (14, 34) поступательного движения ходового механизма, предназначенный для использования разности давлений выше и ниже от ходового механизма (13); при этом система содержит низконапорную насосную станцию (4), соединенную с концом трубопровода (2), противоположным концу на борту трубоукладочного судна (1).
14. Система по п.13, в которой модуль (14) поступательного движения ходового механизма содержит тележку (20) и, по меньшей мере, одно чашеобразное уплотнение (21), смонтированное на тележке (20) и для предотвращения воздушного потока ниже от модуля (14) поступательного движения ходового механизма.
15. Система п.12, в которой ходовой механизм (13, 32) содержит модуль (17) закупоривания трубопровода, содержащий, по меньшей мере, одну надувную камеру (23) для избирательного закупоривания трубопровода (2); и модуль (16) управления для управления модулем (17) закупоривания трубопровода.
16. Система по п.12, в которой ходовой механизм (13, 32) содержит, по меньшей мере, один самоходный модуль (18), в свою очередь, содержащий ведущие колеса (25), контактирующие с трубопроводом (2), и электродвигатель (27).
17. Система по п.16, в которой самоходный модуль (18) содержит устройство (29) рекуперации энергии для рекуперации кинетической энергии ходового механизма (13, 32) при торможении ходового механизма (13, 32) и для приведения в действие электродвигателя (27), работающего как электрогенератор.
| US 3978678 A, 07.09.1976;US 3837214 A, 24.09.1974;US 2004261873 A1, 30.12.2004;US 2004062611 A1, 01.04.2004;US 4498811 A, 12.02.1985. |

