Изобретение относится к грузоподъемным устройствам и может быть использовано для подъема и опускания научно-исследовательской аппаратуры, бурового инструмента в сверхглубоких скважинах малого диаметра при бурении антарктических льдов. Устройство может быть также использовано для контроля и исследования технического состояния стенок обсадных труб глубоких скважин.
Известен телескопический податчик бурильной установки (патент РФ №2018656, Е21С 11/00, опубл. 30.08.1994 г.), состоящий из двух коаксиальных цилиндров и трубчатого штока, в котором между головкой и поршнем закреплена трубка, снабженная дополнительным каналом. Вблизи поршня в стенках штока выполнены радиальные отверстия, а в поршневом участке - продольные каналы.
Недостатком данного устройства являются значительные габаритные размеры и необходимость магистрали сжатого воздуха для его работы.
Известно устройство для контроля технического состояния обсаженных скважин (патент РФ №2380535, Е21В 47/00, опубл. 27.01.2010 г.), содержащее корпус, ротор с приводом вращения, бесконтактный датчик, цилиндрическую направляющую, выполненную в виде уплотняемого телескопического соединения двух гильз, исполнительный механизм в виде винтовой передачи, взаимодействующей с днищами гильз, наземную аппаратуру.
Недостатком данного устройства является необходимость размещения дополнительного привода внутри ротора, что приводит к увеличению осевого размера устройства и не позволяет использовать его в сверхглубоких скважинах малого диаметра.
Известен механизм выдвижения телескопической стрелы (патент РФ №2083471, В66С 23/04, опубл. 10.07.1997 г.), содержащий двигатель, кинематически соединенный с ним ходовой винт, гайку, взаимодействующую с ходовым винтом, высокочастотный генератор.
Недостатком данного устройства являются значительные габаритные размеры и высокая металлоемкость устройства, что не позволяет использовать его для спускоподъемных операций в скважинах малого диаметра.
Известно телескопическое устройство (патент РФ №2180314, В66С 23/687, опубл. 10.03.2002 г.), включающее опорную и подвижные секции, механизм перемещения секций в виде двух последовательно соединенных гидроцилиндров, рабочий орган, устанавливаемый на конце устройства. При этом корпус одного из гидроцилиндров шарнирно соединен со средней секцией.
Недостатком данного устройства является наличие гидропривода, что значительно усложняет конструкцию, увеличивает габариты устройства и не позволяет использовать его в условиях ограниченного пространства скважин малого диаметра.
Известен регулируемый телескопический механизм (патент РФ №2328629, В66С 23/687, F16C 3/02, опубл. 10.07.2008 г.), содержащий внутреннюю и наружную концентричные обоймы и продольные винтовые пары, включающие гайку и винт, обоймы взаимосвязаны между собой окружными рядами опор качения, причем гайка винтовой пары выполнена за одно целое с внутренней обоймой, а винт упомянутой винтовой пары связан с приводом через соединительную муфту и радиально-упорный подшипник.
Недостаток устройства заключается в невозможности обеспечения перемещения на значительное расстояние.
Известен способ выпуска-уборки телескопического цилиндра и устройство для его осуществления (патент РФ №2083884, F15B 15/16, опубл. 10.07.1997 г.), принятое за прототип, содержащее корпус, привод, приводной винт, телескопические цилиндры, фиксаторы и запорные элементы.
Недостатком данного устройства является то, что для фиксации секций цилиндров требуется наличие давления рабочей среды (энергоносителя), что усложняет конструкцию устройства, процесс управления им и не позволяет осуществлять перемещения на значительные расстояния в условиях ограниченного пространства сверхглубоких скважин малого диаметра.
Техническим результатом заявляемого изобретения является устранение указанных недостатков, а именно создание устройства, обеспечивающего подъем и опускание груза, в частности научно-исследовательской аппаратуры, бурового инструмента на значительную глубину и имеющего габаритные размеры, позволяющие разместить его в скважинах малого диаметра при бурении сверхглубоких скважин (например, в антарктических льдах).
Технический результат достигается тем, что телескопические цилиндры выполнены с продольными пазами и направляющими штифтами и снабжены фиксаторами в виде шариков с пружинами, количество которых пропорционально поперечным сечениям цилиндров, внутренние поверхности которых имеют цилиндрические отверстия, глубиной, равной 0,5 диаметра шарика, при этом верхний телескопический цилиндр жестко связан с корпусом, снабженным барабаном с зубчатым венцом внутреннего зацепления с возможностью вращения относительно оси корпуса, а нижний телескопический цилиндр выполнен с гайкой, взаимодействующей с приводным винтом, связанным с приводом устройства.
Такое выполнение устройства позволяет разместить на телескопических цилиндрах трос значительной длины (до 700 м), что гарантирует перемещение груза на большую глубину и при этом обеспечить габаритные размеры устройства, соответствующие размерам скважин малого диаметра (до 127 мм).
Устройство для перемещения грузов в скважинах малого диаметра поясняется чертежами:
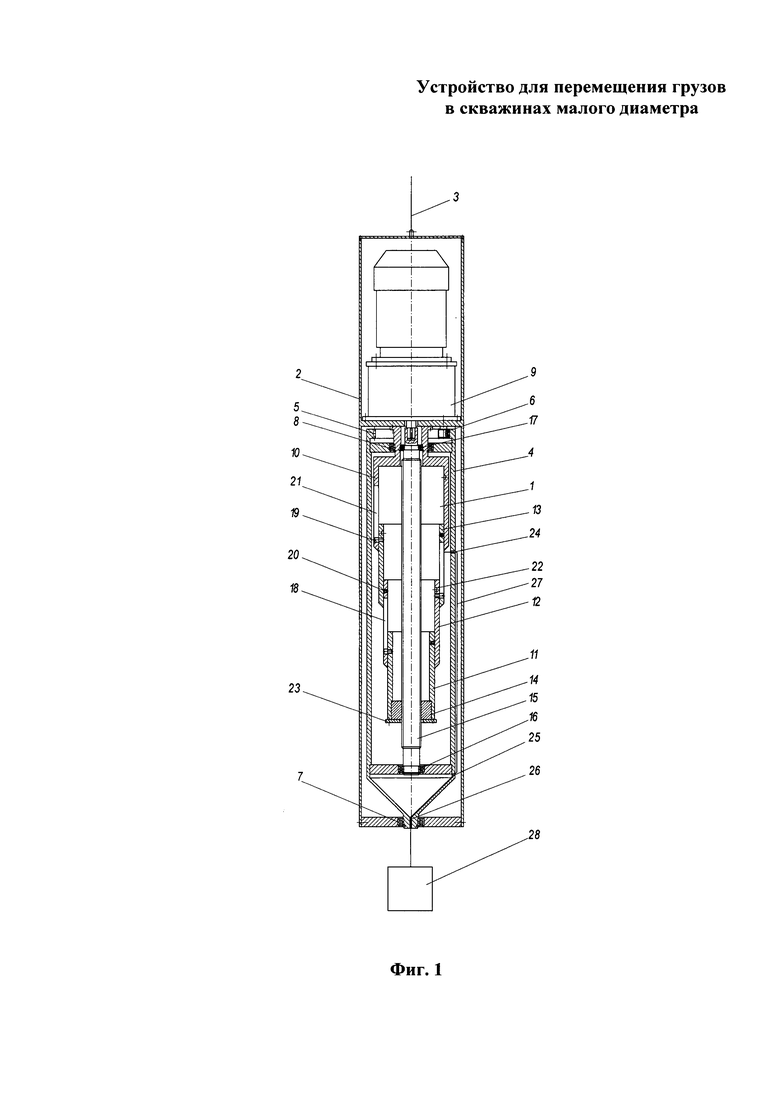
фиг. 1 - общий вид устройства;
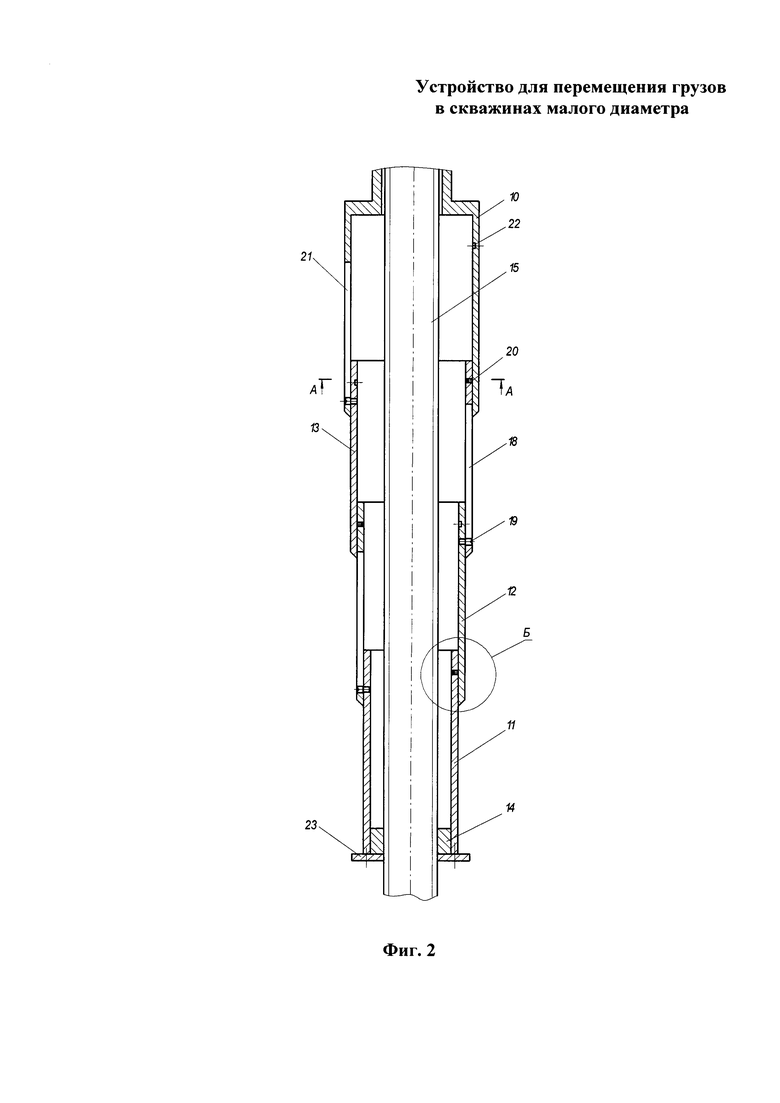
фиг. 2 - положение телескопических цилиндров в начале рабочего цикла;
фиг. 3 - сечение А-А телескопических цилиндров;
фиг. 4 - вид Б на подпружиненные шарики в момент выхода из зацепления;
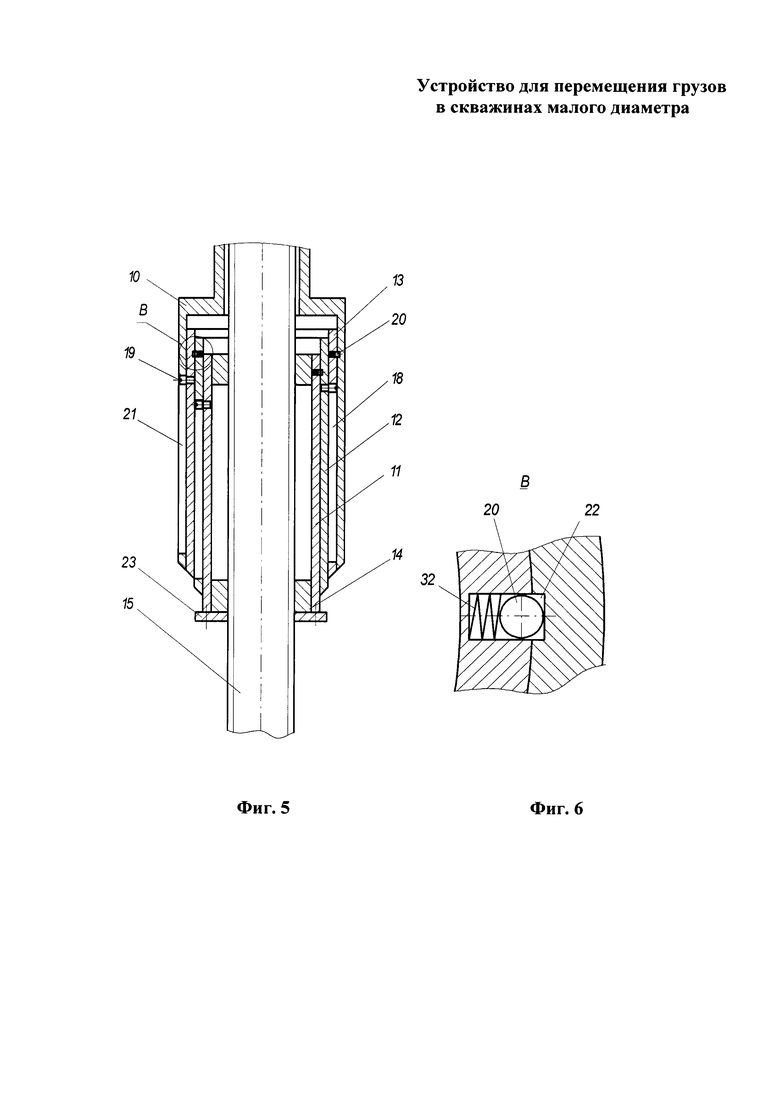
фиг. 5 - положение телескопических цилиндров в конце рабочего цикла;
фиг. 6 - вид В на подпружиненные шарики в момент входа в зацепление;
фиг. 7 - общий вид устройства в начале цикла (груз в верхнем положении);
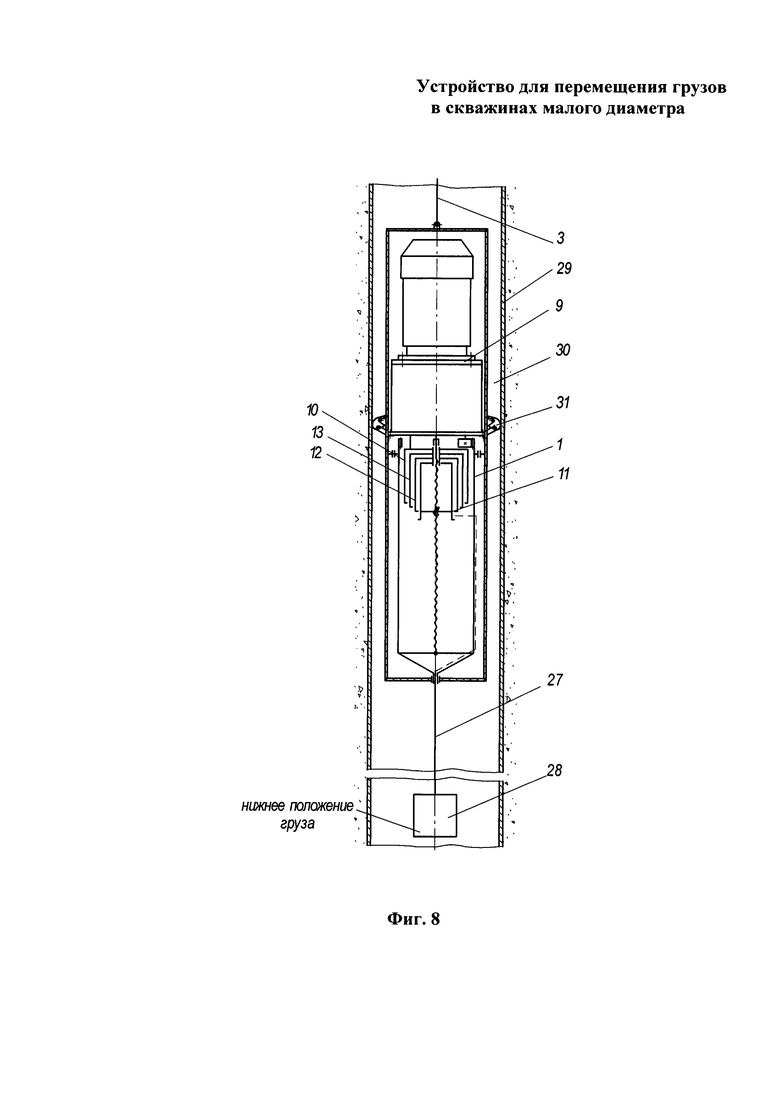
фиг. 8 - общий вид устройства в конце цикла (груз в нижнем положении).
1 - устройство;
2 - корпус;
3 - грузонесущий кабель;
4 - барабан;
5 - зубчатый венец;
6 - шестерня;
7, 8 - подшипники;
9 - привод;
10 - верхний цилиндр;
11, 12, 13 - телескопические цилиндры;
14 - гайка;
15 - приводной винт;
16, 17 - подшипники;
18 - продольные пазы;
19 - цилиндрические штифты;
20 - шарик;
21 - продольный паз верхнего цилиндра;
22 - цилиндрическое отверстие;
23 - предохранительная шайба;
24, 25, 26 - отверстия в барабане;
27 - трос;
28 - перемещаемый груз;
29 - обсадная труба;
30 - скважина;
31 - стопорные элементы;
32 - пружина.
Устройство 1 (фиг. 1) состоит из корпуса 2, подвешенного на грузонесущем кабеле 3. Внутри корпуса 2 размещен барабан 4, снабженный зубчатым венцом внутреннего зацепления 5, входящим в зацепление с шестерней 6. Барабан 4 установлен в подшипниках 7, 8 и приводится во вращение относительно оси корпуса 2 двухпоточным приводом 9 через зубчатую передачу 6, 5. Верхний телескопический цилиндр 10 жестко соединен с корпусом 2 и содержит комплект входящих друг в друга телескопических цилиндров 11, 12, 13 разного поперечного сечения. Необходимое количество телескопических цилиндров определяется требуемой глубиной перемещения груза. Нижний телескопический цилиндр 11 (фиг. 2) выполнен с гайкой 14, взаимодействующей с приводным винтом 15, установленным в подшипниках 16, 17 (фиг. 1). Винт 15 приводится во вращение приводом 9. Для обеспечения осевого перемещения телескопических цилиндров 11, 12, 13 и предотвращения их вращения относительно оси винта 15 цилиндры выполнены с продольными пазами 18 и цилиндрическими штифтами 19, входящими в эти пазы. Все телескопические цилиндры 11, 12, 13 имеют фиксаторы, выполненные в виде подпружиненных шариков 20 (фиг. 1, 2, 4), количество которых пропорционально поперечным сечениям цилиндров, что обеспечивает последовательность их выдвижения. Минимальное количество фиксаторов (например, один) имеет нижний цилиндр 11 наименьшего поперечного сечения, максимальное - цилиндр 13 наибольшего поперечного сечения (например, три). Верхний неподвижный цилиндр 10 также имеет продольный паз 21 (фиг. 2). Кроме того, цилиндр 10 и промежуточные цилиндры 12 и 13 на внутренних поверхностях имеют цилиндрические отверстия 22 глубиной, равной 0,5 диаметра шарика, диаметр отверстий соответствует диаметру подпружиненных шариков 20. Торцевая поверхность нижнего цилиндра 11 снабжена предохранительной шайбой 23.
Барабан 4 выполнен с отверстиями 24, 25, 26, через которые пропущен трос 27, один конец которого связан с поднимаемым грузом 28, а другой при помощи шайбы 23 закреплен на нижнем цилиндре 11.
Работа устройства осуществляется следующим образом.
На грузонесущем кабеле 3 (фиг. 7) устройство 1 с приводом 9 опускают в обсадную трубу 29 скважины 30 и жестко раскрепляют в ней стопорными элементами 31. При этом все телескопические цилиндры 11, 12, 13 выдвинуты по отношению друг к другу и к неподвижному верхнему цилиндру 10 (фиг. 1, фиг. 2), рабочая длина троса 27 полностью намотана на внешние поверхности цилиндров 11, 12, 13, а перемещаемый груз 28 (например, научно-исследовательская аппаратура) находится в верхнем положении (фиг. 7).
При включении привода 9 барабан 4 получает вращательное движение через зубчатую передачу внутреннего зацепления 6, 5. Барабан 4 вращается вместе с тросом 27, пропущенным через отверстия 24, 25, 26, и начинает разматывать трос первоначально с телескопического цилиндра 13. Одновременно с барабаном 4 вращательное движение от двухпоточного привода 9 получает винт 15, сопряженный с гайкой 14 нижнего цилиндра 11, который начинает поступательно перемещаться вверх относительно оси винта 15. Так как на цилиндрах 11, 12, 13 намотан трос 27, препятствующий перемещению телескопических цилиндров относительно друг друга, то поступательное движение гайки 14 передается, прежде всего, на цилиндр 13 и по мере освобождения его от витков троса 27 цилиндр 13 начинает поступательное движение вверх, относительно внутренней поверхности верхнего неподвижного цилиндра 10. Одновременно с этим идет процесс опускания груза 28. При этом цилиндрический штифт 19 цилиндра 13 скользит по продольному пазу 21 неподвижного цилиндра 10. К моменту упора штифта 19 в верхнюю поверхность продольного паза 21 весь трос будет размотан с цилиндра 13, а подпружиненные шарики 20 цилиндра 13 окажутся напротив цилиндрических отверстий 22 цилиндра 10 и будут вытолкнуты силами упругости пружин 32 (фиг. 6) в эти отверстия, в зависимости от жесткости пружин на величину от 0,3 до 0,5 диаметра шарика. Таким образом, телескопический цилиндр 13 окажется полностью задвинутым в неподвижный верхний цилиндр 10 и надежно в нем зафиксирован стопорными элементами (фиксаторами) в виде подпружиненных шариков 20. Вращающийся барабан 4 продолжает процесс разматывания троса 27 со следующего цилиндра 12, который по мере освобождения от троса совершает поступательное движение вверх относительно внутренней поверхности цилиндра 13. По мере полного освобождения указанного цилиндра от троса 27 он оказывается полностью задвинутым в цилиндр 13 и надежно зафиксирован в нем фиксаторами 20. Далее аналогичным образом по мере освобождения от троса происходит перемещение и фиксация цилиндра 11.
По окончании процесса разматывания троса 27 груз 28 оказывается опущенным на требуемую глубину и занимает нижнее положение (фиг. 8), а весь комплект телескопических цилиндров 11, 12, 13 оказывается внутри неподвижного верхнего цилиндра 10 (фиг. 5).
Для подъема груза изменяют направление вращения винта 15 реверсом привода 9, при этом изменяет направление вращения и барабан 4. Вращающийся относительно оси корпуса барабан 4 начинает наматывать трос на нижний цилиндр 11, который начинает поступательное движение вниз, при этом пружина 32 фиксатора сжимается и шарик 20 цилиндра 11 осевым усилием винтовой пары 14, 15 будет выведен из зацепления с цилиндрическим отверстием 22 (фиг. 4) цилиндра 12 и цилиндр 11 вместе с цилиндрическим штифтом 19 начнет движение вниз. К моменту упора штифта 19 в нижнюю поверхность продольного паза цилиндра 12, подпружиненные шарики цилиндра 12 будут выведены из зацепления с цилиндрическими отверстиями цилиндра 13, начнется поступательное движение вниз цилиндра 12 и продолжится процесс намотки троса барабаном 4 на цилиндр 12. Аналогично продолжается процесс намотки троса на цилиндр 13. После того, как все цилиндры будут выдвинуты относительно друг друга и относительно верхнего неподвижного цилиндра 10, груз 28 будет поднят и окажется в верхнем положении (фиг. 7).
Гарантией последовательности выдвижения телескопических цилиндров в указанном порядке является наличие фиксаторов, выполненных в виде шариков с пружинами, количество которых пропорционально размерам поперечных сечений цилиндров. Минимальное количество фиксаторов (например, один) имеет нижний цилиндр наименьшего поперечного сечения 11, максимальное - цилиндр наибольшего поперечного 13 (например, три). Таким образом, в первую очередь начнется выдвижение цилиндра 11, т.к. сопротивление между цилиндрами 11 и 12 при наличии наименьшего количества подпружиненных шариков окажется минимальным.
Такое выполнение устройства позволяет разместить на подвижных телескопических цилиндрах трос значительной длины (до 700 м), что гарантирует транспортировку груза на большую глубину, и при этом обеспечить диаметральные размеры устройства, соответствующие размерам скважин малого диаметра (до 127 мм).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПЛАСТА | 2017 |
|
RU2656644C1 |
| РАЗБУРИВАЕМЫЙ МЕХАНИЧЕСКИЙ ПАКЕР | 2003 |
|
RU2236556C1 |
| АВАРИЙНЫЙ ЭВАКУАТОР | 2003 |
|
RU2251438C1 |
| СПОСОБ РАЗОБЩЕНИЯ ПЛАСТОВ В СКВАЖИНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2182644C2 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| ГЛУБИННЫЙ ДОМКРАТ | 1992 |
|
RU2029852C1 |
| Завинчивающий патрон стационарного устройства для сборки резьбовых соединений | 1982 |
|
SU1039682A1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПЛАСТА | 2001 |
|
RU2186967C1 |
| ИНСТРУМЕНТ ДЛЯ ИЗВЛЕЧЕНИЯ И НАБИВКИ САЛЬНИКОВ В УСТЬЕВОЙ САЛЬНИК УСТЬЕВОЙ АРМАТУРЫ СКВАЖИНЫ | 2016 |
|
RU2630008C1 |


Изобретение относится к грузоподъемным устройствам и может быть применено для подъема и опускания научно-исследовательской аппаратуры, бурового инструмента в сверхглубоких скважинах малого диаметра при бурении антарктических льдов. Устройство может быть также использовано для контроля и исследования технического состояния стенок обсадных труб глубоких скважин. Устройство содержит корпус, привод, приводной винт, телескопические цилиндры, фиксаторы, вращающийся относительно неподвижного корпуса барабан с отверстиями для тягового элемента (например, троса). При этом телескопические цилиндры выполнены с продольными пазами и направляющими штифтами и снабжены фиксаторами в виде шариков с пружинами, количество которых пропорционально поперечным сечениям цилиндров, внутренние поверхности которых имеют цилиндрические отверстия глубиной, равной 0,5 диаметра шарика. При этом верхний телескопический цилиндр жестко связан с корпусом, снабженным барабаном с зубчатым венцом внутреннего зацепления с возможностью вращения относительно оси корпуса, а нижний телескопический цилиндр выполнен с гайкой, взаимодействующей с приводным винтом, связанным с приводом устройства. Технический результат заключается в обеспечении возможности размещения на подвижных телескопических цилиндрах троса значительной длины (до 700 м), что гарантирует подъем-опускание груза на требуемую глубину и при этом обеспечивает минимальные габаритные размеры устройства, соответствующие размерам скважин малого диаметра (до 127 мм). 8 ил.
Устройство для перемещения грузов в скважинах малого диаметра, включающее корпус, привод, приводной винт, телескопические цилиндры, фиксаторы, отличающееся тем, что телескопические цилиндры выполнены с продольными пазами и направляющими штифтами и снабжены фиксаторами в виде шариков с пружинами, количество которых пропорционально поперечным сечениям цилиндров, внутренние поверхности которых имеют цилиндрические отверстия глубиной, равной 0,5 диаметра шарика, при этом верхний телескопический цилиндр жестко связан с корпусом, снабженным барабаном с зубчатым венцом внутреннего зацепления с возможностью вращения относительно оси корпуса, а нижний телескопический цилиндр выполнен с гайкой, взаимодействующей с приводным винтом, связанным с приводом устройства.
| СПОСОБ ВЫПУСКА-УБОРКИ ТЕЛЕСКОПИЧЕСКОГО ЦИЛИНДРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2083884C1 |
| Тампонажное устройство | 1983 |
|
SU1133378A1 |
| ТЕЛЕСКОПИЧЕСКИЙ ПОДАТЧИК БУРИЛЬНОЙ УСТАНОВКИ | 1992 |
|
RU2018656C1 |
| Фонарь для фотографических работ в темной комнате | 1925 |
|
SU4825A1 |
| ГИРЛЯНДНАЯ ДВУХПРОВОДНАЯ ДАТЧИКОВАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА И СПОСОБ | 2021 |
|
RU2783744C1 |

