ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
В общем, изобретение относится к устройству для выполнения измерений, имеющих отношение к разведке на нефть и газ.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
При бурении скважин для проведения разведки на нефть и газ понимание структуры и свойств соответствующей геологической формации обеспечивает информацию для содействия такой разведке. В дополнение к этому интенсивность бурения можно повысить при наличии систем и способов для обнаружения проводящих конструкций ниже земной поверхности. Проводящие конструкции могут включать в себя металлические трубы, используемые в различных способах бурения, при этом определение местоположения металлических труб может иметь важное значение при выполнении операции бурения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах приведено:
Фиг. 1 - пример системы, пригодной для определения положения проводящей конструкции, согласно различным вариантам осуществления;
Фиг. 2 - блок-схема последовательности действий в примере способа определения положения проводящей конструкции относительно приборной структуры, на которой установлены приемные датчики, согласно различным вариантам осуществления;
Фиг. 3 - иллюстрация примера тока в обсадной колонне, который наводит магнитное поле, обнаруживаемое приемником на бурильной трубе, согласно различным вариантам осуществления;
Фиг. 4 - пример прибора для обнаружения проводящей конструкции в пласте, согласно различным вариантам осуществления;
Фиг. 5 - иллюстрация взаимного положения проводящей конструкции и приемников прибора, расположенного на конструкции, параллельной проводящей конструкции, согласно различным вариантам осуществления;
Фиг. 6 - иллюстрация тангенциального и нормального магнитных полей на поверхности конструкции, на которой расположен прибор из Фиг. 5, согласно различным вариантам осуществления;
Фиг. 7А и 7В - моделированные тангенциальные измерения приемником из Фиг. 4, согласно различным вариантам осуществления;
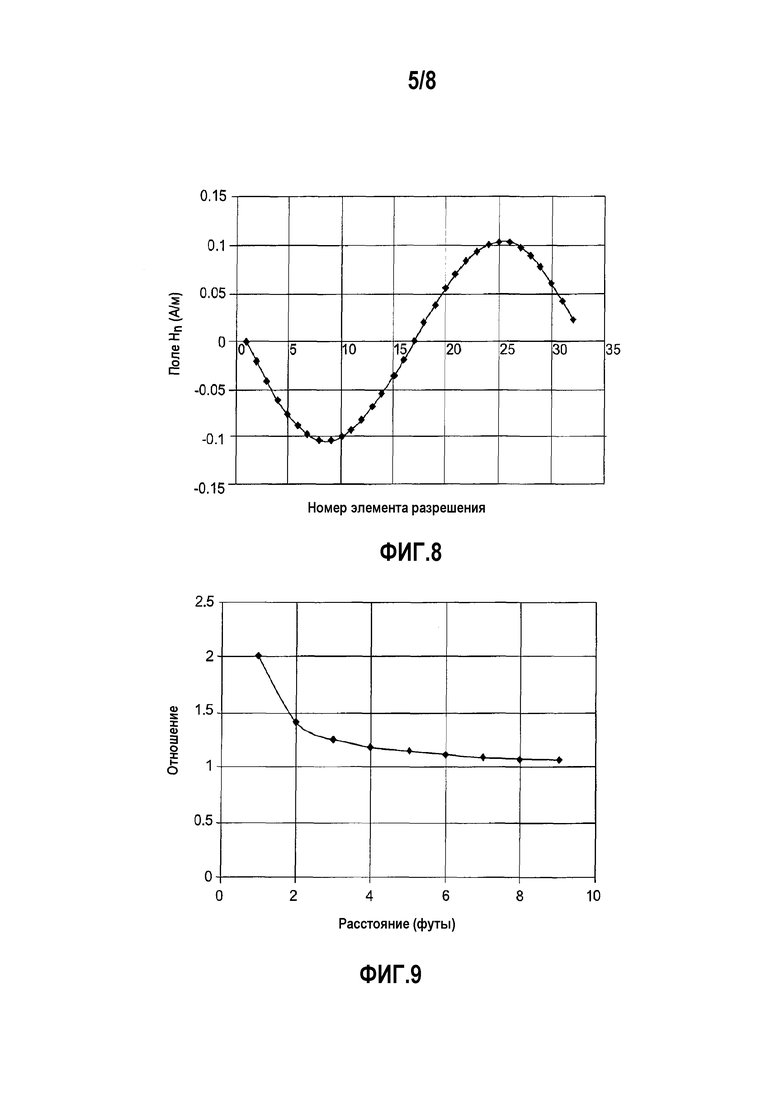
Фиг. 8 - измерения нормальной составляющей магнитного поля в зависимости от номера элемента разрешения, согласно различным вариантам осуществления;
Фиг. 9 - зависимость между расстоянием и отношением максимального магнитного поля к минимальному магнитному полю, согласно различным вариантам осуществления;
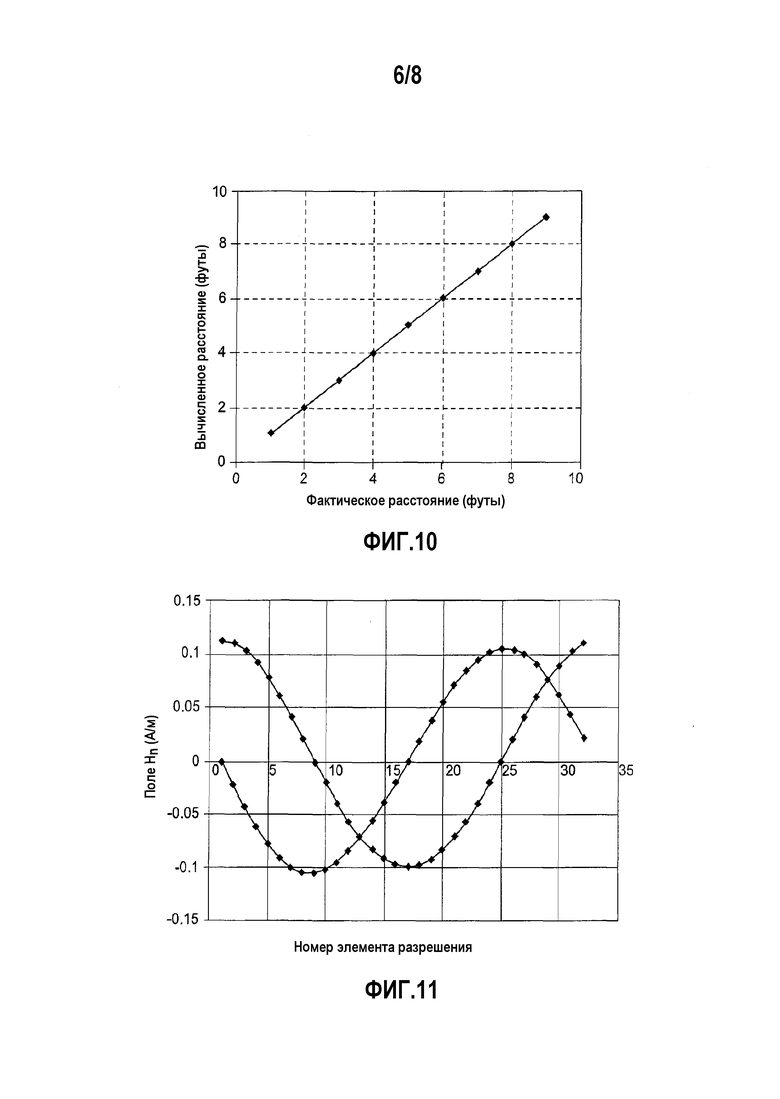
Фиг. 10 - зависимость между фактическим расстоянием и вычисленным расстоянием, согласно различным вариантам осуществления;
Фиг. 11 - иллюстрация двух элементов разрешения, в которых кривая тангенциального магнитного поля и кривая нормального магнитного поля пересекаются, согласно различным вариантам осуществления;
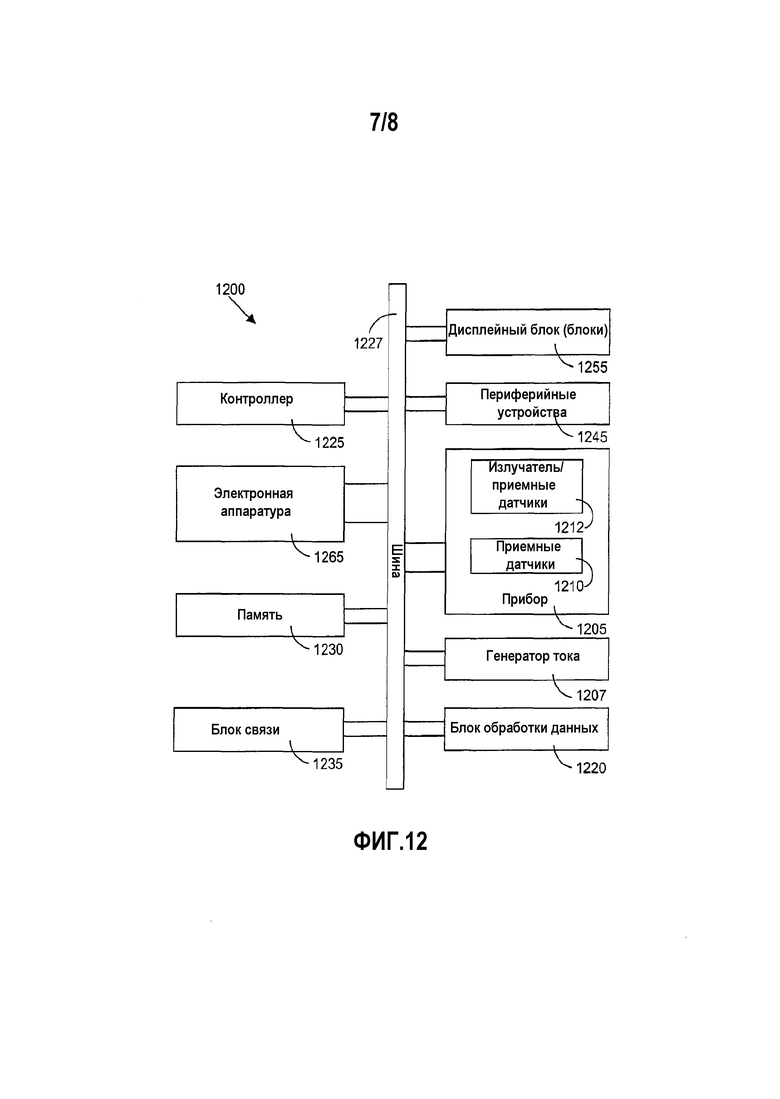
Фиг. 12 - структурная схема примера системы, имеющей прибор, снабженный приемными датчиками, согласно различным вариантам осуществления; и
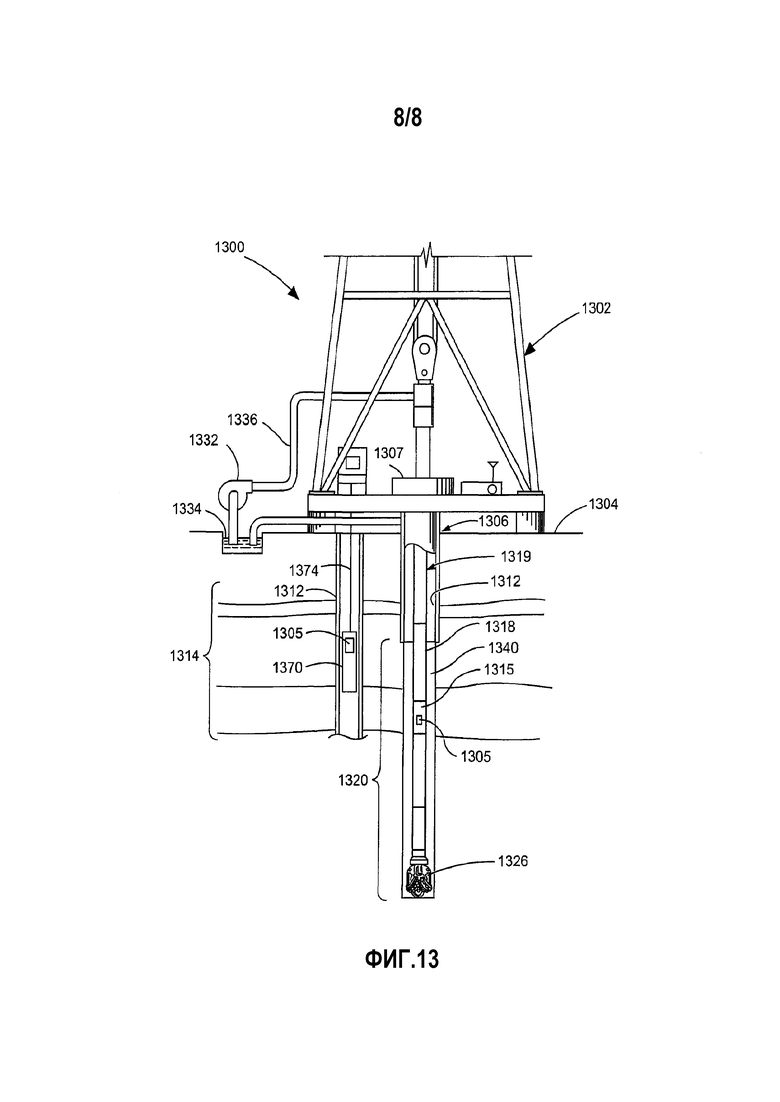
Фиг. 13 - пример системы на месте бурения, при этом система включает в себя прибор, снабженный приемными датчиками, согласно различным вариантам осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
В нижеследующем подробном описании делаются ссылки на сопровождающие чертежи, на которых для примера, а не для ограничения, показываются различные варианты осуществления, в соответствии с которыми изобретение может быть применено на практике. Эти варианты осуществления описываются достаточно подробно, чтобы дать возможность специалистам в данной области техники применить на практике эти и другие варианты осуществления. Можно использовать другие варианты осуществления, а в эти варианты осуществления можно вносить структурные, логические и электрические изменения. Различные варианты осуществления необязательно являются взаимно исключающими, поскольку некоторые варианты осуществления можно объединять с одним или несколькими другими вариантами осуществления, чтобы образовывать новые варианты осуществления. Поэтому нижеследующее подробное описание не следует рассматривать в ограничительном смысле.
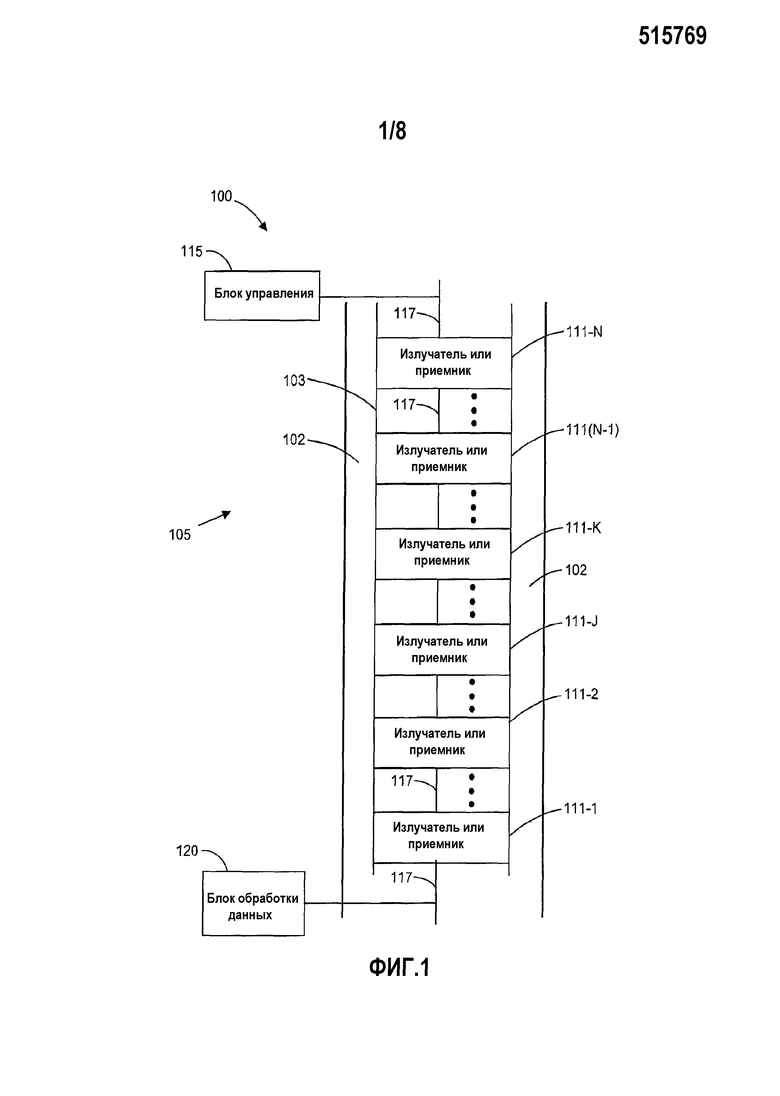
На Фиг. 1 показана структурная схема системы 100 согласно варианту осуществления, имеющей прибор 105 для определения положения проводящей конструкции. Система 100 включает в себя приборную структуру 103, имеющую компоновку датчиков 111-1, 111-2, …, 111-(N-1), 111-(N) вдоль продольной оси 117 приборной структуры 103. Под управлением блока 115 управления каждый датчик 111-1, 111-2, …, 111-(N-1), 111-(N), работающий в области 102, может использоваться как излучающий датчик или приемный датчик. Прибор 105 и способы использования прибора 105 можно применять при глубоководной разведке, чтобы получать угол наклона, азимут и удельные сопротивления Rh и Rv конструкции.
Два датчика 111-J и 111-K из числа датчиков 111-1, 111-2, …, 111-(N-1), 111-(N) могут быть структурированы для определения положения проводящей конструкции относительно приборной структуры 103. Два датчика 111-J и 111-K можно использовать в качестве приемных датчиков, при этом два датчика 111-J и 111-K ориентируют ортогонально друг к другу. Прибор 105 можно реализовывать как прибор, специально предназначенный для определения положения проводящей конструкции, при этом прибор будет содержать одну или нескольких пар приемных датчиков, а приемные датчики каждой пары будут ориентированы ортогонально друг к другу.
Прибор 105 может включать в себя блок 115 управления, способный управлять сбором принимаемых сигналов с приемных датчиков 111-J и 111-K в зависимости тока, протекающего в проводящей конструкции ниже земной поверхности, для определения относительного положения проводящей конструкции. Такое определение может быть реализовано в блоке 120 обработки данных прибора 105, при этом блок 120 обработки данных может быть выполнен с возможностью обработки принимаемых сигналов для определения положения проводящей конструкции. Система 100 может включать в себя излучатель тока, обеспечивающий протекание тока в проводящей конструкции. Излучателем тока может управлять блок 115 управления.
Блок 120 обработки данных и блок 115 управления могут быть выполнены с возможностью управления образованием связанных с магнитным полем значений на основании принимаемых сигналов на приемных датчиках 111-J и 111-K и обработки связанных с магнитным полем значений для определения относительно приборной структуры 103 положения проводящей конструкции на основании связанных с магнитным полем значений и элемента разрешения по углу, связанного с приемными датчиками 111-J и 111-K, прикрепленными к приборной структуре 103. Приборная структура 103 может быть частью бурильной трубы, а проводящая конструкция, положение которой определяют, может быть обсадной колонной в пластовых слоях ниже поверхности в области бурения скважины. Проводящая конструкция может быть обсадной колонной в пластовых слоях ниже дна водного бассейна, имеющего отношение, например, к бурению в море. Проводящая конструкция может включать в себя другие трубы и проводящие конструкции, имеющие отношение к буровым работам.
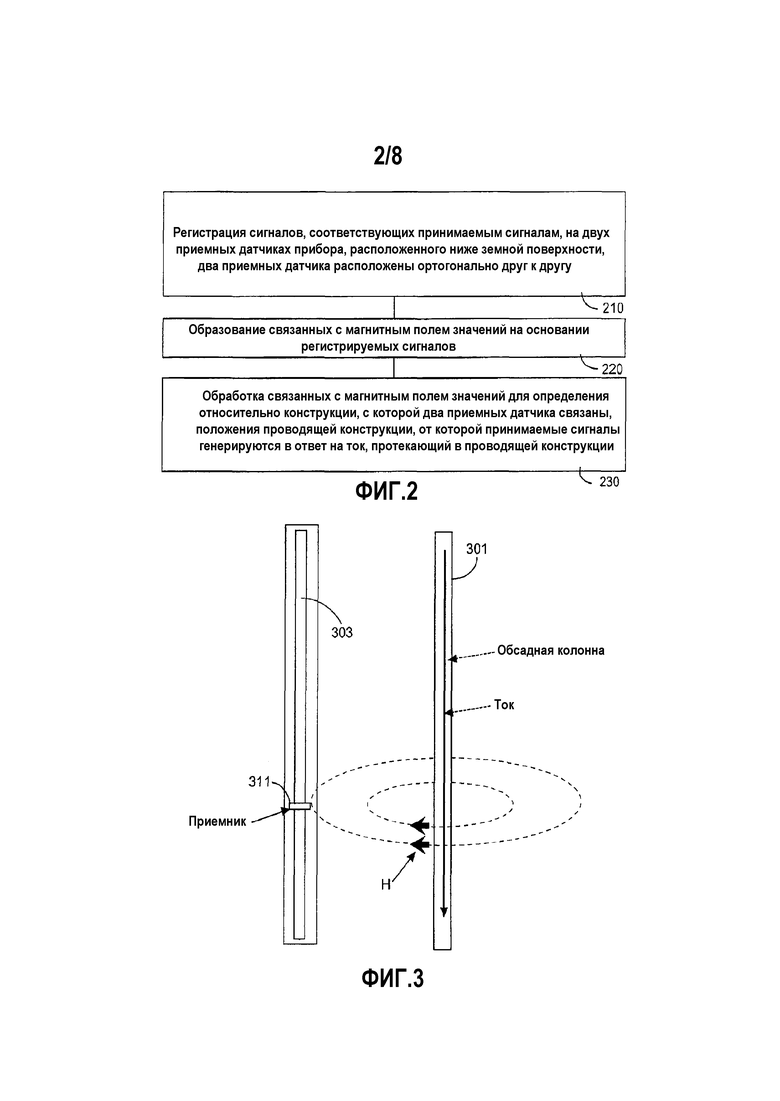
На Фиг. 2 показаны действия в примере способа определения положения проводящей конструкции относительно приборной структуры, на которой установлены приемные датчики. На этапе 210 регистрируют сигналы, соответствующие принимаемым сигналам, на двух приемных датчиках прибора, расположенного ниже земной поверхности. Два приемных датчика могут быть ориентированы ортогонально друг к другу. Сигналы, принимаемые на двух приемных датчиках, могут быть измеряемыми напряжениями, которые соответствуют магнитному полю на приемных датчиках. Получение принимаемых сигналов может включать в себя использование двух приемных рамок на приборе, ориентированных ортогонально друг к другу, для сбора сигналов, генерируемых от проводящей конструкции. Приборная структура может быть ориентирована параллельно проводящей конструкции. Проводящая конструкция может включать в себя обсадную колонну, связанную со скважиной, а приборная структура может быть выполнена как часть бурильной трубы.
На этапе 220 связанные с магнитным полем значения образуют на основании регистрируемых сигналов. Связанные с магнитным полем сигналы могут быть отношениями максимального измеряемого магнитного поля к минимальному измеряемому магнитному полю. Связанные с магнитным полем значения могут быть отношениями составляющих x и y измеряемого магнитного поля. Связанные с магнитным полем значения могут быть отношениями тангенциальной и нормальной составляющих измеряемого магнитного поля.
На этапе 230 связанные с магнитным полем значения обрабатывают, чтобы определить относительно конструкции, с которой два приемных датчика связаны, положение проводящей конструкции, от которой генерируются принимаемые сигналы в ответ на ток, протекающий в проводящей конструкции. Ток, протекающий в проводящей конструкции, может включать в себя ток, непосредственно генерируемый в проводящей конструкции. Обработка связанных с магнитным полем значений может включать в себя вычисление расстояния до проводящей конструкции на основании образуемых связанных с магнитным полем значений. Обработка связанных с магнитным полем значений может включать в себя вычисление азимутального угла прибора относительно проводящей конструкции на основании образуемых связанных с магнитным полем значений.
Определение положения проводящей конструкции относительно конструкции, на которой установлен прибор, имеющий два приемных датчика, может включать в себя сбор принимаемых сигналов с двух приемных датчиков при вращении прибора; связывание принимаемых сигналов с элементом разрешения прибора, при этом элемент разрешения соответствует углу прибора при сборе сигналов; сбор дополнительных принимаемых сигналов и приписывание принимаемых сигналов к различным элементам разрешения, при этом каждый элемент разрешения соответствует азимутальному направлению вращающегося прибора; и определение углового положения проводящей конструкции относительно конструкции, с которой связаны два приемных датчика, на основании определения, какой элемент разрешения охватывает наибольшее абсолютное значение разности между максимальным связанным с магнитным полем значением, получаемым на основании принимаемого сигнала в соответствующем элементе разрешения, и средним связанным с магнитным полем значением.
Определение положения проводящей конструкции может включать в себя определение при отсутствии тока в приборной структуре и при неизвестном значении тока в проводящей конструкции расстояния (Dis), связанного с отношением, касающимся измеряемого минимального магнитного поля, HMinimum, и измеряемого максимального магнитного поля, HMaximum. Определение положения проводящей конструкции может включать в себя определение при наличии тока в проводящей конструкции расстояния (Dis), связанного с отношением, касающимся измеряемого минимального магнитного поля, HMinimum, и измеряемого максимального магнитного поля, HMaximum.
Определение положения проводящей конструкции относительно конструкции, на которой установлен прибор, имеющий два приемных датчика, может включать в себя сбор принимаемых сигналов с двух приемных датчиков при нахождении прибора в режиме отсутствия вращения; образование на основании принимаемых сигналов связанных с магнитным полем значений в виде связанных с магнитным полем значений ортогональных составляющих; и вычисление углового положения проводящей конструкции относительно прибора с использованием связанных с магнитным полем значений ортогональных составляющих и элемента разрешения по углу прибора в режиме отсутствия вращения.
Определение положения проводящей конструкции относительно конструкции, на которой установлен прибор, имеющий два приемных датчика, может включать в себя связывание принимаемых сигналов на приемных датчиках с элементом разрешения по углу прибора, при этом элемент разрешения по углу соответствует углу прибора при сборе принимаемых сигналов; и выполнение процесса инверсии с использованием измеряемого параметра принимаемого сигнала и элемента разрешения по углу для образования азимутального угла прибора относительно проводящей конструкции. Выполнение процесса инверсии может включать в себя использование функций подбора кривой.
Согласно различным вариантам осуществления прибор выполняет действия, чтобы определить относительное положение проводящей конструкции в пласте относительно конструкции, на которой установлен прибор. Прибор может выполнять действия в соответствии с различными вариантами осуществления методологии, по которой производятся действия над сигналами, принимаемыми прибором от проводящей конструкции. Положение может определяться путем вычисления азимутального угла проводящей конструкции относительно прибора на основании принимаемых сигналов и путем вычисления расстояния между конструкцией, на которой установлен прибор, и проводящей конструкцией на основании принимаемых сигналов. Различные методологии можно применять на основании установочных параметров приемников на приборе, действующем, например, как вращающийся прибор или как не вращающийся прибор. Прибор и методологии можно применять для определения положения обсадной колонны относительно бурового инструмента/каротажного прибора.
Прибор может выполнять действия на основании принимаемых сигналов от проводящей конструкции, которые прибор использует для обнаружения. Источником сигналов, которые могут использоваться для обнаружения проводящей конструкции, такой как обсадная колонна, может быть ток, протекающий в проводящей конструкции. Этот ток может наводиться другим источником или может подводиться к проводящей конструкции непосредственно. Ток в проводящей конструкции может наводить магнитные поля вокруг проводящей конструкции, которые могут измеряться с помощью приемников, установленных на приборе. Измеренные сигналы с приемников можно использовать для определения положения проводящей конструкции. Приемники могут быть установлены на бурильной трубе для определения положения обсадной колонны относительно бурильной трубы. На Фиг. 3 показан пример тока в обсадной колонне 301, который наводит магнитное поле, обнаруживаемое приемником 311 на бурильной трубе 303.
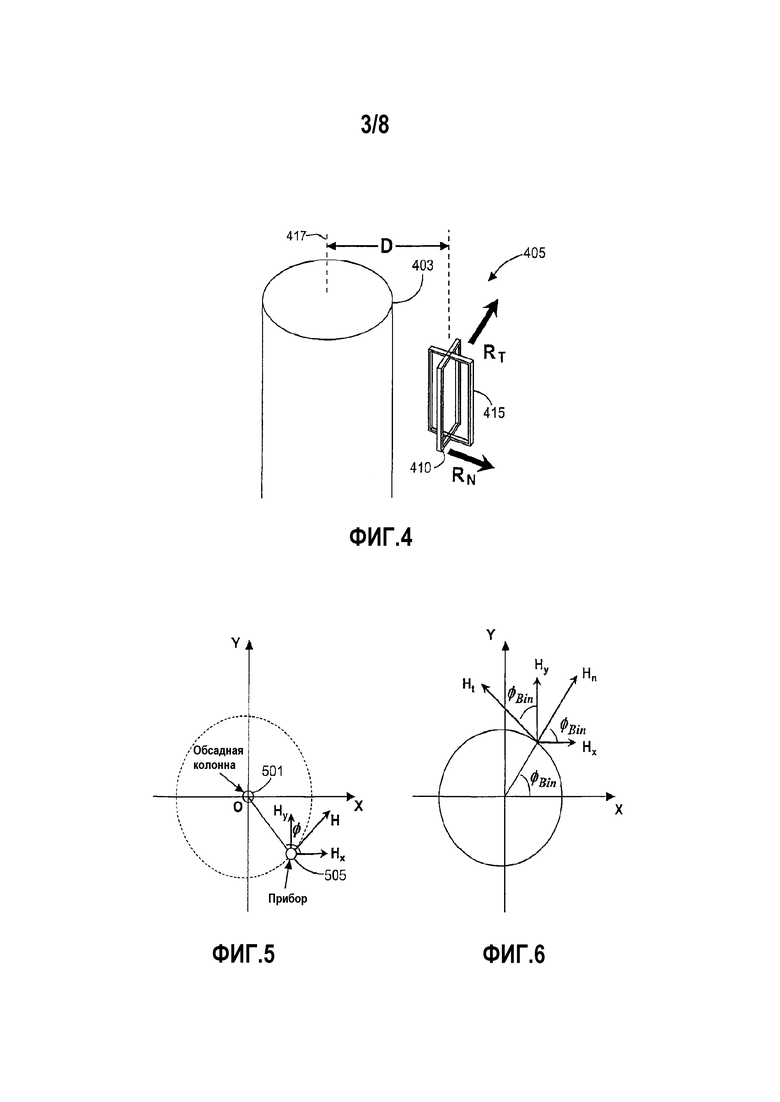
На Фиг. 4 показан прибор 405 согласно примеру варианта осуществления, предназначенный для обнаружения проводящей конструкции в пласте. Прибор 405 может включать в себя приемники 410, 415, выбранные в виде ортогональных рамок. Приемники 410, 415 прибора 405 могут быть расположены как перекрещивающиеся рамки, при этом D является расстоянием между центром приемных рамок 410, 415 и центром 417 бурильной трубы 403, на которой расположен прибор 405. Одна рамка 410, обозначенная в этой заявке как RN, может быть расположена параллельно поверхности бурильной трубы 403 и другая рамка, обозначенная в этой заявке как RT, может быть расположена перпендикулярно к поверхности бурильной трубы 403. Измерения на RN и RT могут быть реализованы как напряжения, наводимые нормальным и тангенциальным магнитными полями, соответственно. Измерения могут быть преобразованы в измерения по направлениям X и Y при выполнении операции вращения прибора.
На Фиг. 5 показано взаимное положение проводящей конструкции 501 и приемников прибора 505, расположенного на конструкции, параллельной проводящей конструкции 501. Взаимное положение представлено азимутальным углом проводящей конструкции 501 относительно прибора 505. Составляющие по направлению X и направлению Y магнитного поля генерируются на приборе 505 током в проводящей конструкции 501. Конструкция может быть реализована в виде бурильной трубы, параллельной обсадной колонне, при этом обсадная колонна является проводящей конструкцией 501, положение которой должно быть определено.
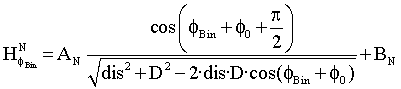
На Фиг. 6 показаны тангенциальное и нормальное магнитные поля на поверхности конструкции, на которой расположен прибор 505 из Фиг. 5. Тангенциальное и нормальное магнитные поля можно вычислить в соответствии со следующими формулами на основании составляющих по направлению X и направлению Y:
Ht=-Hxsin(ϕBin)+Hycos(ϕBin), (1a)
Hn=+Hxcos(ϕBin)+Hysin(ϕBin), (1b)
где Ht, Hn, Hx и Hy представляют тангенциальное, нормальное, по направлению X и по направлению Y магнитные поля. Угол ϕBin является элементом разрешения по углу. В случае прибора, который может вращаться, такого, как расположенный, например, на бурильной трубе, которая вращается, поворот на 360° может быть разделен на некоторое количество равных частей, при этом части именуются элементами разрешения. Например, измерения в пределах 360° могут быть разделены на 32 элемента разрешения, при этом каждый элемент разрешения охватывает 11,25°. Количество элементов разрешения может быть больше или меньше 32 элементов разрешения. Прибор может работать без вращения, при этом измерения будут выполняться в одном элементе разрешения. Соответствующие измерения тангенциального и нормального напряжений, Vt и Vn, можно выразить как
Vt=-Vxsin(ϕBin)+Vycos(ϕBin), (1c)
Vn=+Vxcos(ϕBin)+Vysin(ϕBin), (1d)
где Vx и Vy представляют измерения напряжений рамками по направлению X и направлению Y, соответственно. Поскольку измеряемые напряжения и магнитные поля могут преобразовываться друг в друга, нижеследующее рассмотрение может основываться на измеряемых магнитных полях, но применимо к измеряемым напряжениям.
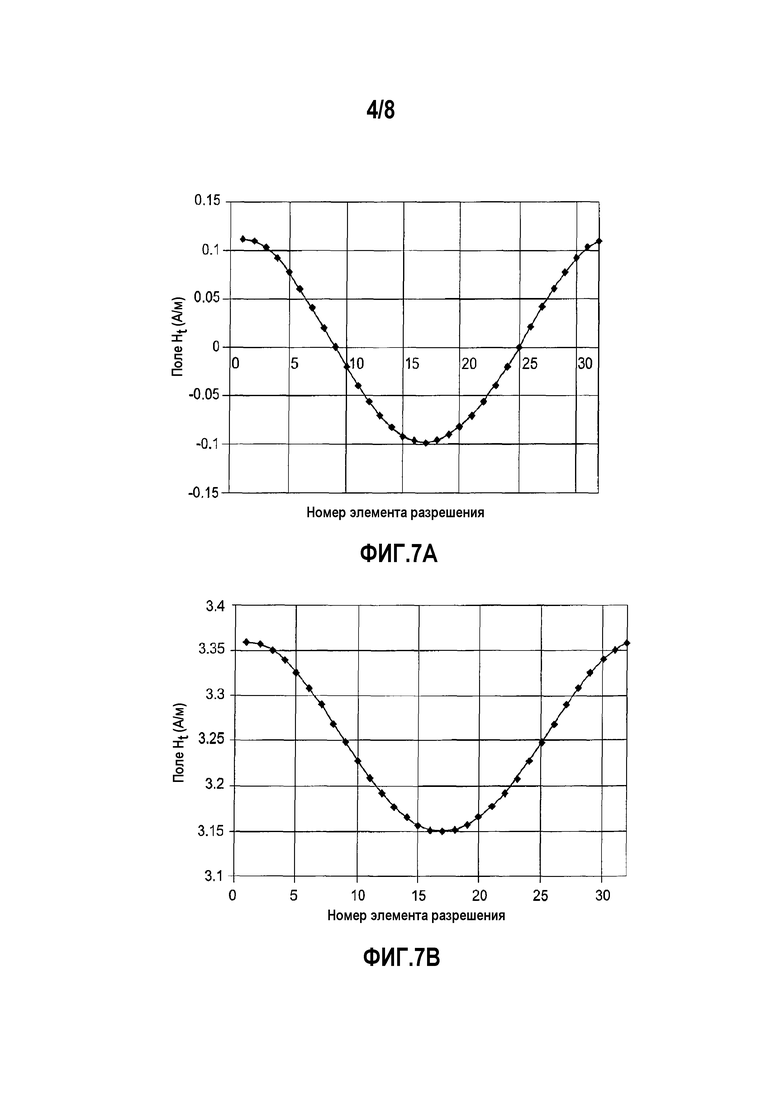
На Фиг. 7А и 7В показаны моделированные тангенциальные измерения на приемнике RT из Фиг. 4. На Фиг. 7А показаны моделированные результаты тангенциальных измерений в зависимости от номера элемента разрешения для бурильной трубы без протекающего тока. На Фиг. 7В показаны моделированные результаты тангенциальных измерений в зависимости от номера элемента разрешения для бурильной трубы с протекающим током. Моделированное магнитное поле на Фиг. 7В сдвинуто относительно показанного на Фиг. 7А, поскольку измерение на RT включает в себя магнитное поле, непосредственно наводимое током в бурильной трубе, которое не зависит от угла поворота. Кривые, показанные на Фиг. 7А и 7В, похожи на синусоидальные кривые, но фактически не являются ими, поскольку |HMaximum-HAverage| не равно |HMinimum-HAverage|. Различие между этими двумя разностями можно использовать для вычисления расстояния от конструкции, на которой прибор расположен, до проводящей конструкции, такого как расстояние от бурильной трубы до обсадной колонны.
На Фиг. 8 показаны измерения нормальной составляющей магнитного поля в зависимости от номера элемента разрешения. Измерения на RN отражают сдвиг элементов разрешения на 90° относительно измерений на RT. Поскольку измерения на RT не чувствительны к магнитному полю, наводимому током в бурильной трубе, измерения на RT отражают только проводящую конструкцию, такую как обсадная колонна.
При получении измерений тангенциальной составляющей соответствующий номер элемента разрешения при максимальных значениях |HMaximum-HAverage| и |HMinimum-HAverage| показывает направление на проводящую конструкцию. Следовательно, направление на проводящую конструкцию можно получать в реальном времени на основании кривых элементов разрешения. В дополнение к этому проводящая конструкция расположена в плоскости, которая перпендикулярна к направлению от элемента разрешения с минимальным значением до элемента разрешения с максимальным значением измерений на RN.
Если конструкция, на которой расположен прибор, не вращается, например, в случае, когда прибор спускают вниз по стволу скважины, нельзя получить форму кривой в зависимости от номера элемента разрешения, показанную на Фиг. 8. Тем не менее, уравнение (2а) и уравнение (2b) можно использовать для вычисления азимутального угла проводящей конструкции относительно направления X, показанного на Фиг. 5 и 6, если ток в конструкции представляет собой постоянный ток
где Hx=-Htsin(ϕBin)+Hncos(ϕBin), (2c)
Hy=Htcos(ϕBin)+Hnsin(ϕBin). (2d)
Если в конструкции, содержащей прибор, ток отсутствует, а ток в проводящей конструкции неизвестен, следующие формулы можно использовать для вычисления расстояния от бурильного инструмента до обсадной колонны:
где 
Если ток в проводящей конструкции, такой как обсадная колонна, известен, среднее абсолютного максимального значения измерения и абсолютного минимального значения измерения можно использовать для вычисления расстоянии в соответствии со следующей формулой:
где 
После того как эквивалентный ток станет известным, его можно использовать для вычисления расстояния до проводящей конструкции в соответствии со следующей формулой, когда прибор спускают вниз и не вращают, поскольку ток в проводящей конструкции, такой как обсадная колонна, спадает очень медленно:
где 
Если в конструкции, на которой расположен прибор, имеется протекающий ток, следующие формулы можно использовать для вычисления расстояния от конструкции до проводящей конструкции:
где 
Согласно различным вариантам осуществления принимаемые сигналы на приемных датчиках прибора могут быть связаны с элементом разрешения по углу прибора, при этом элемент разрешения по углу соответствует углу прибора при сборе сигналов. Процесс инверсии с использованием измеряемого параметра принимаемых сигналов и элемента разрешения по углу можно выполнять для получения азимутального угла прибора относительно проводящей конструкции. Инверсия представляет собой процесс поиска оптимального соответствия между моделированными данными и измерениями. Выполнение инверсии может включать в себя использование функций подбора кривой. Примеры функций подбора кривой включают в себя 
На Фиг. 11 показаны два элемента разрешения, в которых кривая тангенциального магнитного поля и кривая нормального магнитного поля пересекаются. Две кривые получены нанесением кривых из Фиг. 7А и Фиг. 8 на один чертеж. Как показано на Фиг. 11, этими кривыми на одном чертеже отображаются два элемента разрешения, в которых две кривые пересекаются. Один элемент разрешения при отрицательном значении имеет сдвиг 135° элемента разрешения относительно проводящей конструкции; другой элемент разрешения при положительном значении имеет сдвиг -45° элемента разрешения, и этот сдвиг позволяет реализовать быстрый способ определения направления на проводящую конструкцию. Если измерения из Фиг. 7В вычесть из среднего данных и нанести кривую вместе с кривой из Фиг. 8 на один и тот же чертеж, можно получить почти такие же результаты, как на Фиг. 11.
Согласно различным вариантам осуществления в качестве приемников можно использовать ортогональные рамки, которые могут измерять магнитные поля в тангенциальном и нормальном направлениях на поверхности бурильного инструмента. Методологии, изложенные в этой заявке, можно использовать для обнаружения положения проводящей конструкции, когда ток протекает в проводящей конструкции. Методологии, изложенные в этой заявке, можно использовать для определения азимутального угла обсадной колонны относительно бурильного инструмента и можно использовать для вычисления расстояния между обсадной колонной и бурильным инструментом. Прибор можно использовать при вращении и можно использовать без вращения, например, когда прибор спускают вниз по стволу скважины.
Различные компоненты системы, в том числе прибор, имеющий приемные датчики, расположенные для приема сигналов в ответ на ток, протекающий в проводящей конструкции, и имеющий блок обработки данных для обработки связанных с магнитным полем значений, основанных на принимаемых сигналах, для определения относительно приборной структуры положения проводящей конструкции описанным в этой заявке способом или аналогичным, можно реализовать сочетанием аппаратного обеспечения и программного обеспечения. Эти реализации могут включать в себя считываемое машиной запоминающее устройство, имеющее исполняемые машиной инструкции, такое как считываемое машиной запоминающее устройство, имеющее исполняемые компьютером инструкции, для регистрации сигналов, соответствующих принимаемым сигналам, на двух приемных датчиках прибора, расположенного ниже земной поверхности, при этом два приемных датчика расположены ортогонально друг к другу; образования связанных с магнитным полем значений на основании регистрируемых сигналов; и обработки связанных с магнитным полем значений для определения относительно конструкции, с которой связаны два приемных датчика, положения проводящей конструкции, от которой генерируются принимаемые сигналы в ответ на ток, протекающий в проводящей конструкции. Инструкции могут включать в себя инструкции по управлению прибором и обнаружению проводящей конструкции с использованием связанных с магнитным полем значений согласно идеям, изложенным в этой заявке. Кроме того, в данном случае считываемое машиной запоминающее устройство представляет собой физическое устройство, в котором сохраняются данные, представляемые физической структурой в устройстве. Примеры считываемых машиной запоминающих устройств включают в себя, но без ограничения ими, постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), запоминающее устройство на магнитном диске, оптическое запоминающее устройство, флэш-память и другие электронные, магнитные и/или оптические запоминающие устройства.
На Фиг. 12 показана структурная схема системы 1200 согласно примеру варианта осуществления, имеющей прибор 1205, снабженный датчиками, расположенными для обнаружения проводящей конструкции ниже земной поверхности на основании связанных с магнитным полем измерений в ответ на ток, протекающий в проводящей конструкции. Датчики могут быть скомпонованы в виде одной или нескольких пар приемных датчиков, при этом два приемных датчика каждой пары могут быть расположены ортогонально другу к другу. Конструкция, на которой приемные датчики могут быть закреплены, может быть бурильной трубой. Проводящая конструкция, положение которой должно быть определено, может быть обсадной колонной скважины. Система 1200 включает в себя прибор 1205, имеющий компоновку приемных датчиков 1210, которая может быть реализована аналогично или идентично компоновкам датчиков, рассмотренным в этой заявке. Прибор 1205 может включать в себя излучатели/приемники 1212 для выполнения других измерений. Система 1200 может быть сконфигурирована для работы в соответствии с идеями, изложенными в этой заявке.
Система 1200 может включать в себя контроллер 1225, память 1230, электронную аппаратуру 1265 и блок 1235 связи. Контроллер 1225, память 1230 и блок 1235 связи могут быть приспособлены для работы в качестве блока обработки для управления работой прибора 1205, имеющего компоновку приемных датчиков 1210, и для выполнения операций относительно сигналов, собираемых прибором 1205, для определения расстояния от прибора 1205 до проводящей конструкции, такой как обсадная колонна или другая система труб, способом, подобным или идентичным процедурам, рассмотренным в этой заявке. Такой блок обработки можно реализовать при использовании блока 1220 обработки данных, который можно реализовать как один блок или распределенный среди компонентов системы 1200, включая электронную аппаратуру 1265. Контроллер 1225 и память 1230 могут выполнять операции по управлению работой излучателей/приемников 1212, выбору приемных датчиков 1210 в приборе 1205 и управлению схемами обработки в соответствии с измерительными процедурами и обработкой сигналов, описанными в этой заявке. Контроллер 1225 может управлять генератором 1207 тока для обеспечения протекания тока в проводящей конструкции, положение которой должно быть определено. Система 1200 может быть приспособлена для выполнения функций способом, подобным или идентичным используемому в структурах, имеющим отношение к Фиг. 1-11.
Блок 1235 связи может включать в себя средства скважинной связи с надлежащим образом расположенными датчиками. Такие средства скважинной связи могут включать в себя телеметрическую систему. При работе блока 1235 связи могут использоваться сочетания технологий проводной связи и технологий беспроводной связи на частотах, которые не интерферируют с частотами периодических измерений.
Кроме того, система 200 может включать в себя шину 1227, при этом шина 1227 обеспечивает электрическую проводимость между компонентами системы 1200. Шина 1227 может включать в себя адресную шину, шину данных и шину управления, каждая из которых сконфигурирована независимо или в объединенном формате. Шину 1227 можно реализовать при использовании ряда различных сред связи, которые позволяют иметь распределение компонентов системы 1200. Использованием шины 1227 может управлять контроллер 1225.
В различных вариантах осуществления периферийные устройства 1245 могут включать в себя дополнительные запоминающие устройства и/или другие управляющие устройства, которые могут работать в сочетании с контроллером 1225 и/или памятью 1230. Согласно варианту осуществления контроллер 1225 реализован как процессор или группа процессоров, которые могут работать самостоятельно, что зависит от задаваемых функций. Периферийные устройства 1245 могут быть расположены вместе с одним или несколькими дисплеями 1255 в виде распределенных компонентов на поверхности, и эти дисплеи можно использовать вместе с инструкциями, сохраняемыми в памяти 1230, чтобы реализовывать пользовательский интерфейс для мониторинга работы прибора 1205 и/или компонентов, распределенных в системе 1200. Пользовательский интерфейс можно использовать для ввода значений рабочих параметров, так что система 1200 может работать автономно, по существу без вмешательства пользователя.
На Фиг. 13 показана система 1300 согласно варианту осуществления, расположенная на буровой площадке, при этом система 1300 включает в себя измерительный прибор 1305, снабженный датчиками и блоком обработки данных, расположенный для обнаружения проводящей конструкции ниже земной поверхности на основании связанных с магнитным полем измерений в ответ на ток, протекающий в проводящей конструкции. Датчики могут быть скомпонованы в виде одной или нескольких пар приемных датчиков, при этом два приемных датчика каждой пары могут быть расположены ортогонально друг к другу. Конструкция, на которой приемные датчики могут быть закреплены, может быть бурильной трубой. Проводящая конструкция, положение которой должно быть определено, может включать в себя обсадную колонну скважины. Система 1300 включает в себя прибор 1305, имеющий компоновку приемников, блок управления и блок обработки данных, которые могут быть реализованы способом, аналогичным или идентичным способу реализации устройств, рассмотренных в этой заявке.
Система 1300 может включать в себя буровую установку 1302, расположенную на поверхности 1304 скважины 1306, и бурильную колонну, то есть колонну 1319 бурильных труб, соединенных друг с другом с образованием бурильной колонны, которую спускают с помощью роторного стола в буровую скважину или ствол 1312 скважины. Буровая установка 1302 может обеспечивать поддержку бурильной колонне 1319. Бурильная колонна 1319, проходящая сквозь роторный стол 1307, может приводиться в движение для бурения ствола 1312 скважины через подземные пласты 1314. Бурильная колонна 1319 может включать в себя бурильную трубу 1318 и компоновку 1320 низа бурильной колонны, расположенную на нижнем участке бурильной трубы 1318.
Компоновка 1320 низа бурильной колонны может включать в себя утяжеленную бурильную трубу 1315, измерительный прибор 1305, прикрепленный к утяжеленной бурильной трубе 1315, и буровое долото 1326. Буровое долото 1326 может приводиться в движение для создания ствола 1312 скважины путем проходки поверхности 1304 и подземных пластов 1314. Измерительный прибор 1305 может быть приспособлен для реализации в стволе скважине системы измерений в процессе бурения (ИПБ), такой как система каротажа во время бурения (КВБ), чтобы обнаруживать проводящую конструкцию, такую как обсадная колонна или другая проводящая конструкция. Определение положения проводящей конструкции можно использовать для направления процесса бурения относительно обнаруживаемой проводящей конструкции. Измерительный прибор 1305 может быть конструктивно оформлен для использования в морских условиях. Корпус, содержащий измерительный прибор 1305, может включать в себя электронику для сбора откликов с приемников измерительного прибора 1305. Такая электроника может включать в себя блок обработки данных для анализа сигналов, обнаруживаемых измерительным прибором 1305, и передачи результатов измерений, таких как расстояние от прибора 1305 до проводящей конструкции и направление на нее, на поверхность с помощью стандартного механизма связи, используемого при эксплуатации скважины. В качестве варианта электроника может включать в себя связной интерфейс для передачи сигналом, обнаруживаемых измерительным прибором 1305, на поверхность с помощью стандартного механизма связи, используемого при эксплуатации скважины, где обнаруживаемые сигналы могут анализироваться в блоке обработки на поверхности.
В различных вариантах осуществления измерительный прибор 1305 может быть заключен в корпус 1370 прибора, соединенный с каротажным кабелем 1374, таким как, например, бронированный каротажный кабель. Корпус 1370 прибора, содержащий измерительный прибор 1305, может включать в себя электронику для сбора откликов с приемников измерительного прибора 1305. Такая электроника может включать в себя блок обработки данных для анализа сигналов, обнаруживаемых измерительным прибором 1305, и передачи результатов измерений, таких как расстояние от прибора 1305 до проводящей конструкции и направление на нее, на поверхность с помощью стандартного механизма связи, используемого при эксплуатации скважины. В качестве варианта электроника может включать в себя связной интерфейс для передачи сигналов, обнаруживаемых измерительным прибором 1305, на поверхность с помощью стандартного механизма связи, используемого при эксплуатации скважины, при этом эти собираемые обнаруживаемые сигналы анализируются в блоке обработки на поверхности. Каротажный кабель 1374 может быть реализован как бронированный каротажный кабель (многожильные силовые и связные кабели), одножильный кабель (один проводник) и/или стальной трос малого диаметра (без проводников для электропитания или связи), или другая конструкция, подходящая для использования в стволе 1312 скважины.
Во время буровых работ бурильная колонна 1319 может вращаться с помощью роторного стола 1307. В дополнение к этому или как вариант компоновка 1320 низа бурильной колонны также может вращаться двигателем (например, забойным двигателем), который расположен в скважине. Утяжеленные бурильные трубы 1315 могут использоваться для добавления массы к буровому долоту 1326. Кроме того, утяжеленные бурильные трубы 1315 могут придавать жесткость компоновке 1320 низа бурильной колонны, что позволяет компоновке 1320 низа бурильной колонне передавать дополнительную массу к буровому долоту 1326, способствующую проникновению бурового долота сквозь поверхность 1304 и подземные пласты 1314.
Во время буровых работ насос 1332 для бурового раствора может закачивать промывочную жидкость (в ряде случаев называемую специалистами в данной области техники буровым раствором) из отстойника 1334 по шлангу 1336 в бурильную трубу 1318 и вниз к буровому долоту 1326. Промывочная жидкость может вытекать из бурового долота 1326 и возвращаться на поверхность 1304 через кольцевое пространство 1340 между бурильной трубой 1318 и сторонами ствола 1312 скважины. Затем промывочная жидкость может возвращаться в отстойник 1334, где такая жидкость фильтруется. В некоторых вариантах осуществления промывочная жидкость может использоваться для охлаждения бурового долота 1326, а также для обеспечения смазывания бурового долота 1326 во время буровых работ. В дополнение к этому промывочную жидкость можно использовать для удаления обломков выбуренной породы из подземного пласта 1314, образующихся при работе бурового долота 1326.
Хотя были показаны и описаны конкретные варианты осуществления, специалисту в данной области техники должно быть понятно, что любая компоновка, которая рассчитана на решение аналогичной задачи, может быть использована в конкретном показанном варианте осуществления. В различных вариантах осуществления используются преобразования и/или сочетания вариантов осуществления, описанных в этой заявке. Следует понимать, что приведенное выше описание предполагается иллюстративным, а не ограничивающим, и что фразеология или терминология, использованная в этой заявке, служит задачам описания. Сочетания приведенных выше вариантов осуществления и других вариантов осуществления станут понятными специалистам в данной области техники при изучении приведенного выше описания.
Использование: для обнаружения и определения положения проводящих конструкций ниже земной поверхности. Сущность изобретения заключается в том, что приборы могут снабжаться приемными датчиками, расположенными для приема сигналов, генерируемых от проводящей конструкции в ответ на ток, протекающий в проводящей конструкции. Связанные с магнитным полем значения, получаемые на основании сигналов, могут обрабатываться относительно прибора для определения положения проводящей конструкции, от которой сигналы генерируются в ответ на ток, протекающий в проводящей конструкции. Технический результат: обеспечение возможности определения положения проводящих конструкций ниже земной поверхности. 3 н. и 20 з.п. ф-лы, 14 ил.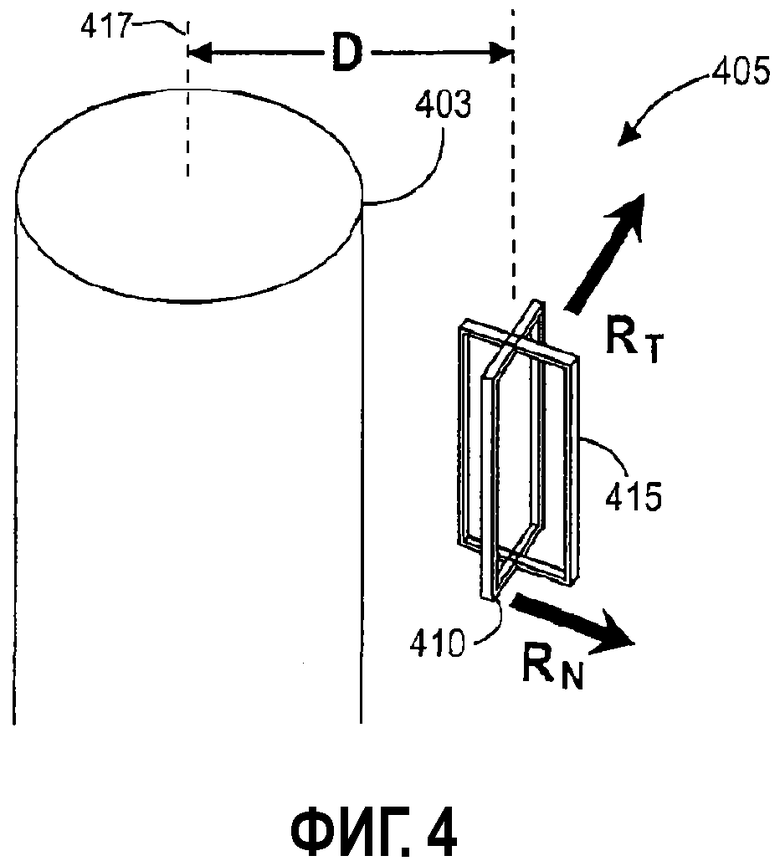
1. Способ определения расстояния до проводящей конструкции под земной поверхностью, содержащий этапы, на которых:
регистрируют сигналы, соответствующие принимаемым сигналам, на двух приемных датчиках прибора, расположенного ниже земной поверхности, при этом два приемных датчика расположены ортогонально друг к другу;
образуют связанные с магнитным полем значения на основании регистрируемых сигналов; и
обрабатывают связанные с магнитным полем значения, чтобы определить относительно конструкции, с которой связаны два приемных датчика, положение проводящей конструкции, от которой принимаемые сигналы генерируются в ответ на ток, протекающий в проводящей конструкции, в том числе определить расстояние в зависимости от отношения, касающегося измеренного минимального магнитного поля и измеренного максимального магнитного поля, причем измеренное минимальное магнитное поле и измеренное максимальное магнитное поле являются выбранными из множества измерений магнитного поля.
2. Способ по п. 1, в котором обработка связанных с магнитным полем значений включает в себя вычисление азимутального угла прибора относительно проводящей конструкции на основании образованных связанных с магнитным полем значений.
3. Способ по п. 1, в котором способ включает в себя непосредственную генерацию тока в проводящей конструкции.
4. Способ по п. 1, в котором способ включает в себя использование двух приемных рамок на приборе, ориентированных ортогонально друг к другу, для сбора сигналов, генерируемых от проводящей конструкции.
5. Способ по п. 1, в котором способ включает в себя:
сбор принимаемых сигналов с двух приемных датчиков при вращении прибора;
связывание принимаемых сигналов с элементом разрешения прибора, при этом элемент разрешения соответствует углу прибора при сборе сигналов;
сбор дополнительных принимаемых сигналов и приписывание дополнительных принимаемых сигналов к различным элементам разрешения, при этом каждый элемент разрешения соответствует азимутальному направлению вращающегося прибора; и
определение углового положения проводящей конструкции относительно конструкции, с которой связаны два приемных датчика, на основании определения, какой элемент разрешения включает в себя наибольшее абсолютное значение разности между максимальным связанным с магнитным полем значением, полученным на основании принимаемого сигнала в соответствующем элементе разрешения, и средним связанным с магнитным полем значением.
6. Способ по п. 1, в котором определение положения проводящей конструкции включает в себя определение при отсутствии тока в приборной структуре и неизвестном значении тока в проводящей конструкции расстояния (Dis) в зависимости от отношения, касающегося измеренного минимального магнитного поля HMinimum и измеренного максимального магнитного поля HMaximum.
7. Способ по п. 6, в котором Dis дается  , где
, где  , или
, или  , где D - расстояние между центром двух приемных датчиков и центром конструкции, с которой связаны два приемных датчика,
, где D - расстояние между центром двух приемных датчиков и центром конструкции, с которой связаны два приемных датчика,  и k1 - калибровочная постоянная, так что Dis определяется одним из (1-α1) или (α2-1), которое больше нуля.
и k1 - калибровочная постоянная, так что Dis определяется одним из (1-α1) или (α2-1), которое больше нуля.
8. Способ по п. 1, в котором определение положение проводящей конструкции включает в себя определение при наличии тока в приборной структуре расстояния (Dis) в зависимости от отношения, касающегося измеренного минимального магнитного поля HMinimum и измеренного максимального магнитного поля HMaximum.
9. Способ по п. 8, в котором Dis дается  , где
, где  , или
, или  , где D - расстояние между центром двух приемных датчиков и центром конструкции, с которой связаны два приемных датчика,
, где D - расстояние между центром двух приемных датчиков и центром конструкции, с которой связаны два приемных датчика,  и k4 - калибровочная постоянная, так что Dis определяется одним из (1-α1) или (α2-1), которое больше нуля.
и k4 - калибровочная постоянная, так что Dis определяется одним из (1-α1) или (α2-1), которое больше нуля.
10. Способ по п. 1, в котором способ включает в себя:
сбор принимаемых сигналов с двух приемных датчиков при нахождении прибора в режиме отсутствия вращения;
образование связанных с магнитным полем значений на основании принимаемых сигналов в виде значений связанных с магнитным полем ортогональных составляющих; и
вычисление углового положения проводящей конструкции относительно прибора при использовании значений связанных с магнитным полем ортогональных составляющих и элемента разрешения по углу прибора в режиме отсутствия вращения.
11. Способ по п. 10, в котором угловое положение дается  при Hx>0 или
при Hx>0 или  при Hx>0, где Hy и Hx - составляющие y и x магнитного поля и являются функциями элемента разрешения по углу.
при Hx>0, где Hy и Hx - составляющие y и x магнитного поля и являются функциями элемента разрешения по углу.
12. Способ по п. 10, в котором определение положения включает в себя определение расстояния (Dis), даваемого  , где
, где  , и k3 - калибровочная постоянная, где Hy и Hx - составляющие y и x магнитного поля, на основании эквивалентного тока в проводящей конструкции, связанного с отношением измеренного минимального магнитного поля к измеренному максимальному магнитному полю.
, и k3 - калибровочная постоянная, где Hy и Hx - составляющие y и x магнитного поля, на основании эквивалентного тока в проводящей конструкции, связанного с отношением измеренного минимального магнитного поля к измеренному максимальному магнитному полю.
13. Способ по п. 1, где способ включает в себя:
связывание принимаемых сигналов на двух приемных датчиках с элементом разрешения по углу прибора, при этом элемент разрешения по углу соответствует углу прибора при сборе сигналов; и
выполнение процесса инверсии с использованием измеряемого параметра принимаемых сигналов и элемента разрешения по углу для образования азимутального угла прибора относительно проводящей конструкции.
14. Способ по п. 13, в котором выполнение процесса инверсии включает в себя использование функций подбора кривой  для измерений тангенциального направления,
для измерений тангенциального направления, 
15. Способ по п. 1, в котором проводящая конструкция включает в себя обсадную колонну, связанную со скважиной, а приборная структура является частью бурильной трубы.
16. Способ по п. 1, в котором способ включает в себя определение относительно конструкции, с которой связаны два приемных датчика, положения проводящей конструкции относительно конструкции, с которой связаны два приемных датчика, ориентированных параллельно проводящей конструкции.
17. Считываемое машиной запоминающее устройство, имеющее инструкции, сохраняемые в нем, которые при исполнении машиной побуждают машину к выполнению операций, при этом операции содержат способ по любому из пп. 1-16.
18. Система для определения расстояния до проводящей конструкции под земной поверхностью, содержащая:
два приемных датчика прибора, приспособленных для связи с конструкцией, в рабочем состоянии расположенной ниже земной поверхности, для приема сигналов на двух приемных датчиках, расположенных ниже земной поверхности, два приемных датчика расположены ортогонально друг к другу относительно конструкции, с которой два приемных датчика связаны;
блок управления, выполненный с возможностью управления сбором принимаемых сигналов с приемных датчиков в зависимости от тока, протекающего в проводящей конструкции ниже земной поверхности; и
блок обработки данных для обработки принимаемых сигналов для определения положения проводящей конструкции, в том числе для определения расстояния в зависимости от отношения, касающегося измеренного минимального магнитного поля и измеренного максимального магнитного поля, причем измеренное минимальное магнитное поле и измеренное максимальное магнитное поле являются выбранными из множества измерений магнитного поля.
19. Система по п. 18, в которой система включает в себя излучатель тока для протекания тока в проводящей конструкции.
20. Система по п. 18, в которой блок обработки данных и блок управления выполнены с возможностью образования связанных с магнитным полем значений на основании принимаемых сигналов, и обработки связанных с магнитным полем значений для определения относительно конструкции, с которой связаны два приемных датчика, положения проводящей конструкции на основании связанных с магнитным полем значений и элемента разрешения по углу, связанного с двумя приемными датчиками.
21. Система по п. 18, в которой приемные датчики включают в себя две рамки, расположенные ортогонально друг к другу.
22. Система по п. 18, в которой система включает в себя считываемое машиной запоминающее устройство, имеющее инструкции, сохраняемые в нем, которые при исполнении системой побуждают систему к выполнению способа по любому из пп. 1-16.
23. Система по п. 18, в которой два приемных датчика, блок управления и блок обработки данных сконфигурированы для выполнения способа по любому из пп. 1-16.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Устройство для электромагнитного каротажа скважин | 1981 |
|
SU960701A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

