Уровень техники
В современных условиях добычи углеводородов важно точно знать расположение целевой скважины по отношению к опорной скважине, которая может использоваться, например, для таких операций, как гравитационное дренирование при закачке пара (SAGD).
Краткое описание графических материалов
На Фиг. 1 проиллюстрирован вариант реализации системы для измерения расстояния до целевой скважины.
На Фиг. 2 проиллюстрирован другой вариант реализации системы для измерения расстояния до целевой скважины.
На Фиг. 3 проиллюстрирован еще один вариант реализации системы для измерения расстояния до целевой скважины.
На Фиг. 4 проиллюстрирован еще один вариант реализации системы для измерения расстояния до целевой скважины.
На Фиг. 5 проиллюстрирован вариант реализации схемы для генерирования опорного сигнала в соответствии с системами, проиллюстрированными на Фиг. 1-4.
На Фиг. 6 проиллюстрирован вариант реализации устройства для реконструкции полученного опорного сигнала и обнаружения магнитного или электрического поля в соответствии с вариантами реализации изобретения на Фиг. 1-4.
На Фиг. 7 проиллюстрирована типовая диаграмма выходных сигналов синхронизирующего усилителя в соответствии с вариантом реализации изобретения на Фиг. 6.
На Фиг. 8 проиллюстрирован увеличенный вид диаграммы сигналов, проиллюстрированных на Фиг. 7.
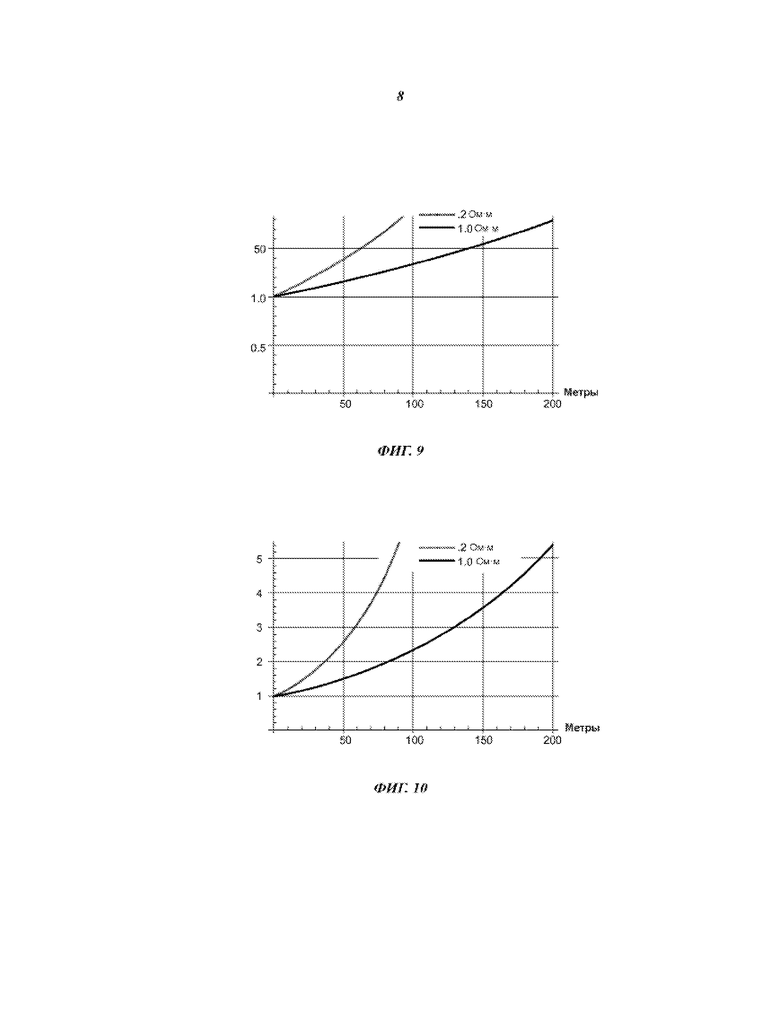
На Фиг. 9 проиллюстрирована типовая диаграмма отношения амплитуд сигнала на приборе для измерения дальности в соответствии с вариантом реализации изобретения на Фиг. 6.
На Фиг. 10 проиллюстрирована диаграмма отношения амплитуд сигнала на приборе для измерения дальности, имеющего увеличенную частоту для измерения дальности, в соответствии с вариантом реализации изобретения на Фиг. 6.
На Фиг. 11 проиллюстрированы варианты реализации системы для измерения расстояния до целевой скважины, в которых используется скважинный прибор на каротажном кабеле и на бурильной трубе.
Подробное описание изобретения
Различные варианты реализации изобретения, описанные в данной заявке, служат для получения информации, которая служит для проверки: производится ли бурение скважины вблизи по меньшей мере одной скважины. Например, путем определения местоположения целевой скважины относительно опорной скважины.
С целью исключения двусмысленного толкования, “целевая скважина” будет определяться как скважина, местоположение которой должно использоваться как точка отсчета при бурении другой скважины. Другая скважина будет определяться как “опорная скважина”. В других вариантах реализации изобретения данная терминология может использоваться в противоположном значении, поскольку варианты реализации изобретения не ограничиваются отдельно взятой целевой скважиной и отдельно взятой опорной скважиной. В большинстве вариантов реализации местоположение опорной скважины фактически хорошо известно, местоположение целевой скважины не так хорошо известно, при этом необходимо определить расстояние от опорной скважины до целевой скважины.
Некоторые технологии измерения расстояния от опорной скважины до удаленной обсадной колонны в целевой скважине основаны на подаче тока с известной частотой с поверхности земли вниз по обсадной колонне целевой скважины и получении сигнала, распространенного обсадной колонной опорной скважины. При прохождении через различные геологические породы полученные сигналы могут быть очень слабыми, особенно с учетом того, что некоторые технологии основаны на измерении градиента магнитного поля через сравнительно небольшой диаметр скважинного или бурового инструмента. Описанные ниже варианты реализации изобретения могут использоваться с целью увеличения отношения сигнал/шум в сигнале, полученном с помощью магнитного прибора для измерения дальности, в результате чего повышается точность определения расстояния между опорной скважиной и целевой скважиной, а также расширяется диапазон, в котором целевая скважина может быть точно обнаружена для планирования пересечения или предотвращения пересечения стволов скважин.
На близких расстояниях представленные варианты реализации изобретения могут использоваться на более высоких частотах по сравнению с теми, которые были возможны ранее. Некоторые варианты реализации изобретения могут легко распространяться на другие приборы для измерения дальности, выполненные с возможностью использования сигналов, излучаемых из скважины, до которой выполняется измерение расстояния (например, целевой скважины). Примеры таких приборов включают те, в которых дальность измеряется с помощью электрических полей или комбинации электрического и магнитного полей. Варианты реализации, описанные в данной заявке, могут быть применимы при измерении расстояния до скважин через геологические породы с высокой проводимостью.
Варианты реализации изобретения для измерения расстояния до целевой скважины, проиллюстрированные на Фиг. 1-4, имеют ряд общих характеристик. Например, варианты реализации изобретения генерируют зондирующий сигнал непосредственно из тактового сигнала, генерируемого задающим генератором, и опорного сигнала, сгенерированного на основании тактового сигнала. Результирующий опорный сигнал имеет гораздо более низкую частоту, чем зондирующий сигнал. Устройство, подключенное к скважинному прибору, содержит схему реконструкции, выполненную с возможностью реконструкции опорного сигнала из полученного сигнала, переданного к скважинному прибору.
Варианты реализации изобретения могут содержать один или более магнитометров, магнитных градиометров или датчиков электрического поля для измерения значений полей или изменения значений полей, наводимых целевой скважиной в зависимости от зондирующего сигнала, передаваемого вниз по целевой скважине. Как будет описано ниже, далее может быть определено сравнительное расположение целевой скважины по отношению к опорной скважине на основании зависимости между реконструированным опорным сигналом и значениями магнитного или электрического поля или изменениями в этих полях. Сравнительное расположение целевой скважины может включать сравнительное расстояние от опорной скважины, а также угол наклона опорной скважины.
Зондирующий сигнал, передаваемый в обсадную колонну целевой скважины, может генерироваться непосредственно задающим генератором. Опорный сигнал является производным сигналом от одного и того же задающего генератора. При этом частота опорного сигнала отличается от зондирующего сигнала, передаваемого в обсадную колонну. Опорный сигнал получают путем использования схемы умножения и деления частоты (например, схемы преобразования частоты).
Если частота опорного сигнала была только составной частью частоты задающего осциллятора, нелинейные искажения данного сигнала можно легко спутать с обнаруженным зондирующим сигналом. Другими словами, данная гармоника может исказить полученный зондирующий сигнал. Также гармоника может исказить опорный сигнал синхронизирующего усилителя, используемого в системе (более подробно будет описан ниже). Таким образом, в различных вариантах реализации изобретения опорный сигнал генерируется путем деления частоты задающего осциллятора на целое число n и умножения на другое целое число m, причем m/n < 1. Например, если зондирующий сигнал имеет частоту 5 Гц, сначала может генерироваться сигнал 5/7 Гц, а затем из него может быть получен сигнал 2*5/7 Гц. Основной и первыми тремя гармониками такого сигнала являются 1,4285 Гц, 2,8571 Гц, 4,28571 Гц и 5,7143 Гц.
Сигналы любой из этих частот можно легко получить из 5 Гц опорного сигнала, излучаемого из обсадной колонны целевой скважины. Основная гармоника (в данном примере 1,4285 Гц) может распространяться через толщу земли со значительно меньшими потерями сигнала, чем опорный сигнал с частотой 5 Гц.
Как описано ниже, с помощью синхронизирующего усилителя можно добиться разделения сигналов, являющихся гораздо более близкими по частоте, чем в вышеприведенном примере, даже если потери сигнала через толщу земли являются существенными. Таким образом, возможно получение опорного сигнала более низкой частоты, чем в данном примере, без искажения зондирующего сигнала. Например, при использовании соотношения 2/17 основной частоты основная и 8 первых гармоник сигнала 5 Гц имеют частоту 0,5882 Гц, 1,1765 Гц, 2,3529 Гц, 2,9412 Гц, 3,5294 Гц, 4,1177 Гц, 4,7059 Гц и 5,2941 Гц.
На Фиг. 1 проиллюстрирован вариант реализации системы для измерения расстояния до целевой скважины. В данной системе используется передающая схема, содержащая токовую петлю большой площади 150 (например, петлевую антенну) для излучения опорного сигнала в геологическую породу над опорной скважиной 101. Петлевая антенна 150 может быть выполнена в виде проводника большого размера вблизи или в непосредственном контакте с поверхностью геологической породы.
Система содержит задающий осциллятор 120, который является генератором прецизионного тактового сигнала. Как будет описано ниже, желательно, чтобы частота данного тактового сигнала была относительно стабильной. Способность описанных ниже синхронизирующих усилителей подавлять помехи является функцией стабильности опорного сигнала, генерируемого задающим осциллятором 120, и времени интегрирования, используемого в синхронизирующем усилителе. Таким образом, чем стабильнее тактовая частота, тем лучше характеристика подавления помех синхронизирующего усилителя.
Задающий осциллятор 120 соединен с усилителем мощности 122 (например, усилителем с симметричным входом/выходом), выход которого соединен с обсадной колонной 130 целевой скважины 100, а выход соединен с заземленным электродом 124. Усилитель мощности 122 выполнен с возможностью усиления мощности до значения, необходимого для излучения целевого сигнала вниз по обсадной колонне целевой скважины 100.
Контур масштабирования частоты 121 (например, делитель и множитель частоты) соединен с задающим осциллятором 120. Контур масштабирования частоты 121 выполнен с возможностью преобразования опорного сигнала путем понижения частоты для передачи. Контур масштабирования частоты 121 выполнен с возможностью деления частоты тактового сигнала от задающего осциллятора 120 на первое целое число n и умножения результата деления на второе целое число m таким образом, что m/n < 1.
Усилитель мощности 123 (например, усилитель с симметричным входом/выходом) соединен с выходом контура масштабирования частоты 121. Усилитель мощности 123 выполнен с возможностью усиления мощности до значения, используемого для излучения опорного сигнала в геологическую породу над опорной и целевой скважинами 100, 101. Вариант реализации генератора опорного сигнала и схема передатчика 120, 121, 123 описывается ниже со ссылкой на Фиг. 5.
Система в опорной скважине 101 дополнительно содержит прибор для измерения дальности 103. Прибор для измерения дальности 103 может быть скважинным прибором, который является частью бурильной колонны в опорной скважине 101. Прибор для измерения дальности 103 содержит устройство для обнаружения магнитного или электрического полей для определения сравнительного расположения целевой скважины 100 по отношению к опорной скважине 101. Устройство для обнаружения магнитных или электрических полей более подробно описано ниже со ссылкой на Фиг. 6.
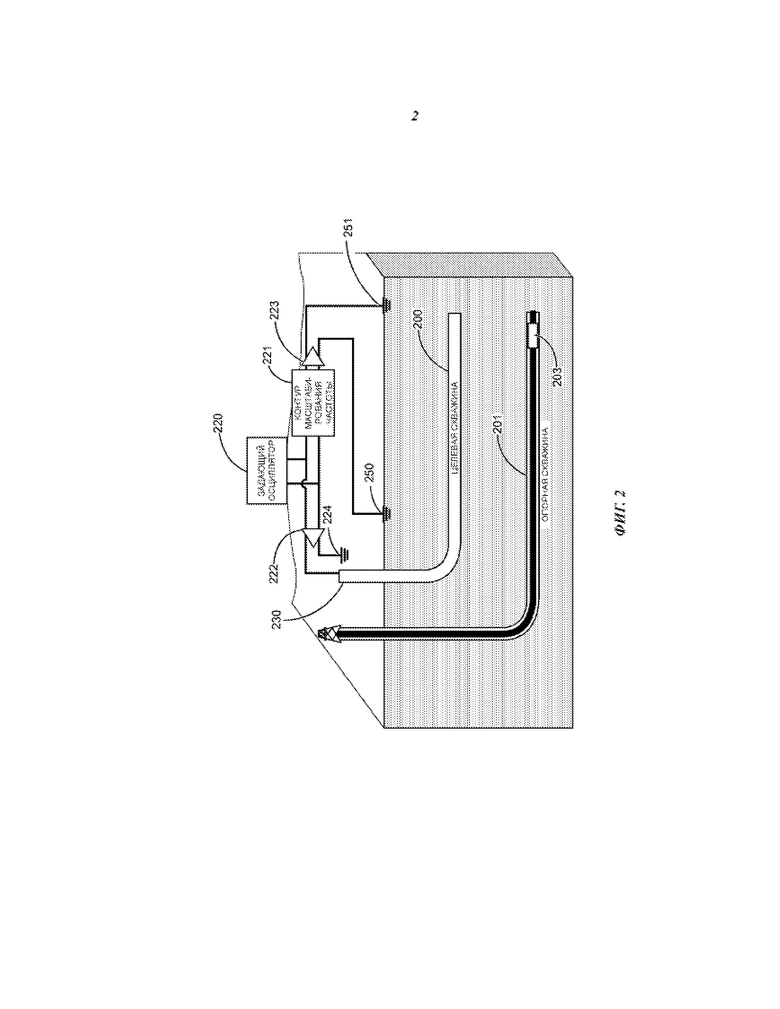
На Фиг. 2 проиллюстрирован другой вариант реализации системы для измерения расстояния до целевой скважины. В данной системе используется передающая схема, содержащая один или более заземленных контактов (например, дипольные передатчики) 250, 251 для излучения опорного сигнала в геологическую породу над целевой скважиной 200 и опорной скважиной 201.
Система содержит задающий осциллятор 220, соединенный с усилителем мощности 222, который содержит выход, соединенный с обсадной колонной 230 целевой скважины 200, а также выход, соединенный с заземленным электродом 224. Усилитель мощности 222 (например, усилитель с симметричным входом/выходом) выполнен с возможностью усиления мощности до значения, используемого для излучения зондирующего сигнала вниз по целевой скважине 200.
Контур масштабирования частоты 221 (например, делитель и умножитель частоты) соединен с задающим осциллятором 220. Контур масштабирования частоты 221 выполнен с возможностью преобразования опорного сигнала путем понижения частоты для передачи. С помощью контура масштабирования частоты 221 генерируется сигнал с частотой, которую получают путем деления частоты тактового сигнала от задающего осциллятора 220 на первое целое число n и умножения результата деления на второе целое число m таким образом, что m/n < 1.
Усилитель мощности 223 (например, усилитель с симметричным входом/выходом) соединен с выходом контура масштабирования частоты 221. Усилитель мощности 223 выполнен с возможностью усиления мощности до значения, используемого для излучения опорного сигнала через заземленные контакты 250, 251 в геологическую породу над опорной и целевой скважинами 200, 201. Вариант реализации схемы генерирования опорного сигнала 220, 221, 223 описывается ниже со ссылкой на Фиг. 5.
Система дополнительно содержит прибор для измерения дальности 203 в опорной скважине 201. Прибор для измерения дальности 203 может быть скважинным прибором, который является частью бурильной колонны в опорной скважине 201. Прибор для измерения дальности 203 содержит устройство для обнаружения магнитного или электрического полей для определения сравнительного расположения целевой скважины 200 по отношению к опорной скважине 201. Устройство для обнаружения магнитных или электрических полей более подробно описано ниже со ссылкой на Фиг. 6.
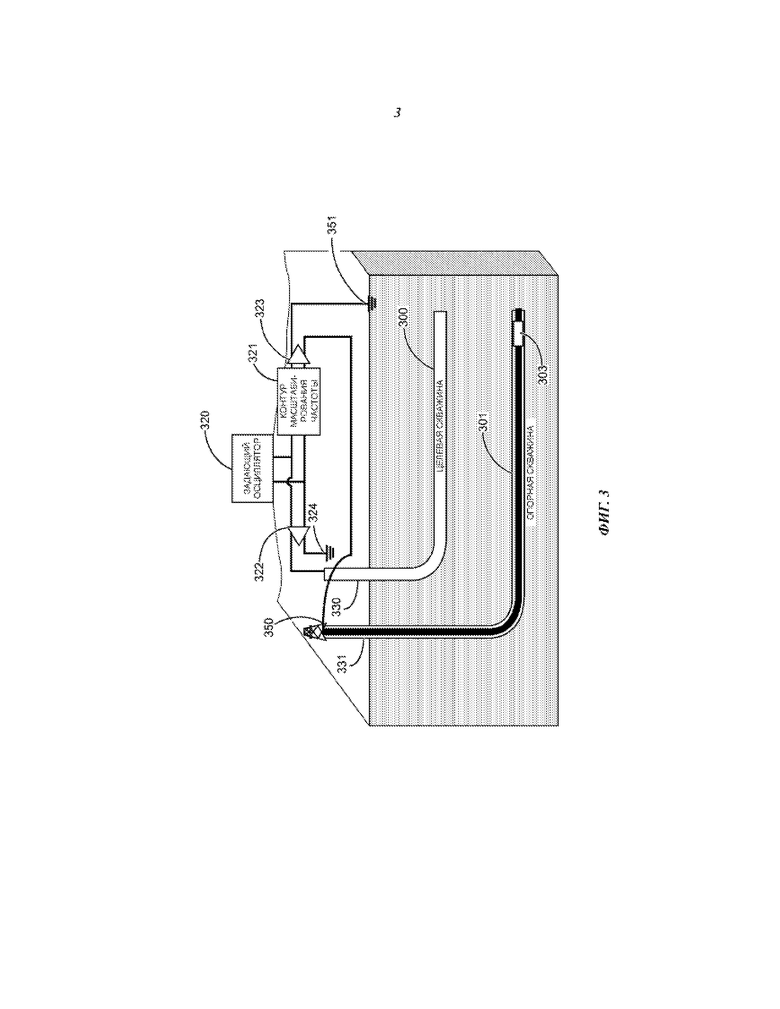
На Фиг. 3 проиллюстрирован еще один вариант реализации системы для измерения расстояния до целевой скважины. В данной системе на поверхности используется электрод 351, а также электрод 350, соединенный с обсадной колонной 331 скважины, содержащей прибор для измерения дальности 303 (например, опорной скважины) с целью излучения опорного сигнала в геологическую породу над целевой скважиной 300 и опорной скважиной 301, а также по всей длине опорной скважины 301.
Система содержит задающий осциллятор 320, соединенный с усилителем мощности 322 (например, усилителем с симметричным входом/выходом), выход которого соединен с обсадной колонной 330 целевой скважины 300, а выход соединен с заземленным электродом 324. Усилитель мощности 322 выполнен с возможностью усиления мощности до значения, используемого для излучения зондирующего сигнала вниз по обсадной колонне целевой скважины 300.
Контур масштабирования частоты 321 (например, делитель и множитель частоты) соединен с задающим осциллятором 320. Контур масштабирования частоты 321 выполнен с возможностью преобразования опорного сигнала путем понижения частоты для передачи. Контур масштабирования частоты 321 выполнен с возможностью деления частоты тактового сигнала от задающего осциллятора 320 на первое целое число n и умножения результата деления на второе целое число m таким образом, что m/n < 1.
Усилитель мощности 323 (например, усилитель с симметричным входом/выходом) соединен с выходом контура масштабирования частоты 321. Усилитель мощности 323 выполнен с возможностью усиления мощности до значения, используемого для излучения опорного сигнала в геологическую породу над опорной и целевой скважинами 300, 301, а также вниз по опорной скважине 301. Усилитель мощности 323 имеет выход, соединенный с электродом 351, расположенным в земле, а также выход, соединенный с электродом 350, соединенным с обсадной колонной опорной скважины 301. Вариант реализации схемы генерирования опорного сигнала 320, 321, 323 описан ниже со ссылкой на Фиг. 5.
Система дополнительно содержит прибор для измерения дальности 303 в опорной скважине 301. Прибор для измерения дальности 303 может быть скважинным прибором, который является частью бурильной колонны в опорной скважине 301. Прибор для измерения дальности 303 содержит устройство для обнаружения магнитного или электрического полей для определения сравнительного расположения целевой скважины 300 по отношению к опорной скважине 301. Устройство для обнаружения магнитных или электрических полей более подробно описано ниже со ссылкой на Фиг. 6.
На Фиг. 4 проиллюстрирован еще один вариант реализации системы для измерения расстояния до целевой скважины. В данной системе используется суммирующий усилитель 424 выполненный с возможностью суммирования опорного сигнала с зондирующим сигналом перед подачей полученного суммарного сигнала в обсадную колонну 430 целевой скважины 400.
Система содержит задающий осциллятор 420, соединенный с суммирующим усилителем 424, который в свою очередь содержит выход, соединенный с усилителем мощности 422 (например, усилитель с симметричным входом/выходом). Выход усилителя мощности 422 соединен с обсадной колонной 430 целевой скважины 400, причем другой выход усилителя мощности 422 соединен с заземленным электродом 425. Усилитель мощности 422 выполнен с возможностью усиления мощности до значения, используемого для излучения зондирующего сигнала вниз по обсадной колонне целевой скважины 400.
Контур масштабирования частоты 421 (например, делитель и множитель частоты) соединен с задающим осциллятором 420. Контур масштабирования частоты 421 выполнен с возможностью преобразования опорного сигнала путем понижения частоты для передачи. Контур масштабирования частоты 421 выполнен с возможностью деления частоты тактового сигнала от задающего осциллятора 420 на первое целое число n и умножения результата деления на второе целое число m таким образом, что m/n < 1.
Первый усилитель 423 (например, усилитель с симметричным входом/выходом) соединен с выходом контура масштабирования частоты 421. Выход усилителя 423 соединен с входом суммирующего усилителя 424 таким образом, что с помощью суммирующего усилителя 424 возможно суммирование опорного сигнала с зондирующим сигналом перед излучением полученного суммарного сигнала вниз по целевой скважине 400. Усилитель мощности 426 содержит вход, соединенный с выходом усилителя 423, выход, соединенный с заземленным электродом 427, а также выход, соединенный с обсадной колонной 450 опорной скважины 401. Усилитель мощности 426 выполнен с возможностью усиления мощности до значения, используемого для излучения зондирующего сигнала вниз по опорной скважине 401. Вариант реализации схемы генерирования опорного сигнала 420, 421, 423 описан ниже со ссылкой на Фиг. 5.
Система дополнительно содержит прибор для измерения дальности 403 в опорной скважине 401. Прибор для измерения дальности 403 может быть скважинным прибором, который является частью бурильной колонны в опорной скважине 401. Прибор для измерения дальности 403 содержит устройство для обнаружения магнитного или электрического полей для определения сравнительного расположения целевой скважины 400 по отношению к опорной скважине 401. Устройство для обнаружения магнитных или электрических полей более подробно описано ниже со ссылкой на Фиг. 6.
Варианты реализации изобретения, проиллюстрированные на Фиг. 1-4, выполнены с возможностью передачи опорного сигнала различными способами. Например, некоторые варианты реализации изобретения могут быть целесообразными в случае, если требованиями безопасности будут исключаться варианты, в которых передаваемый сигнал, как правило, сигнал, обладающий большой энергией, может представлять опасность для персонала буровой вышки или существует опасность взрыва.
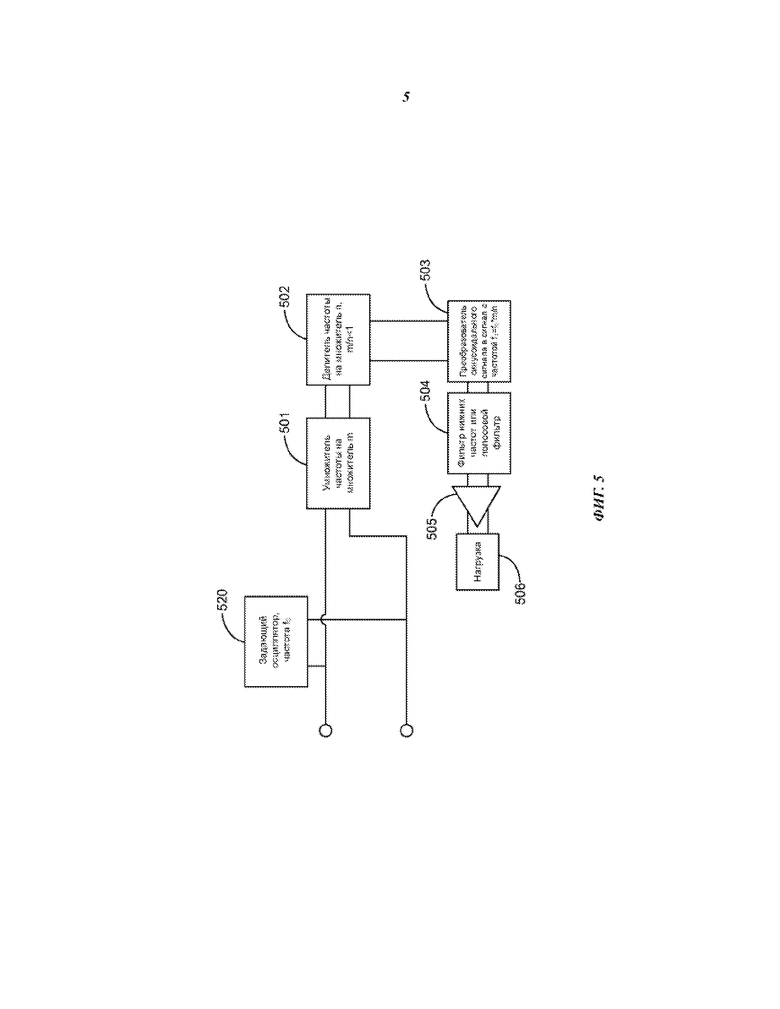
На Фиг. 5 проиллюстрирован вариант реализации схемы генерирования опорного сигнала. Вариант реализации, проиллюстрированный на Фиг. 5, приводится исключительно с целью наглядности, поскольку опорный сигнал может генерироваться с помощью других способов. Данная схема выполнена с возможностью генерирования опорного сигнала, имеющего частоту f0⋅m/n тактов в секунду, где f0 является частотой задающего осциллятора (например, генератора прецизионного тактового сигнала).
Схема содержит задающий осциллятор 520, выполненный с возможностью генерирования тактового сигнала. Схема умножения 501 выполнена с возможностью умножения частоты f0 на целое число m. Полученная частота, mf0, затем подается на вход схемы деления 502, которая выполнена с возможностью деления полученной частоты на целое число n для генерирования опорного сигнала с частотой f0⋅m/n.
Схема преобразования 503 выполнена с возможностью приема тактового сигнала от схемы деления 502 и преобразования его в сигнал синусоидальной формы с частотой f , причем f = f0⋅m/n. В другом варианте реализации изобретения схема преобразования 503 может быть опущена за счет использования фильтрации на выходе схемы деления 502. Сигнал синусоидальной формы от схемы преобразования 503 поступает на вход фильтра (например, фильтра нижних частот, полосового фильтра) 504, выполненного с возможностью подавления нежелательных частот, близких к опорной частоте. Усилитель 505 выполнен с возможностью усиления мощности до значения, необходимого для передачи сигнала к нагрузке 506 в зависимости от одного или более описанных выше вариантов реализации изобретения. Нагрузкой 506 может быть передатчик 150, заземленные контакты 250, 251, соединение обсадной колонны 350 и заземлитель 351 или соединение обсадной колонны 450 и заземлитель 427.
В другом варианте реализации изобретения опорный сигнал может генерироваться в цифровом виде. В случае цифровой реализации, при которой опорный сигнал генерируется в цифровом виде, опорный сигнал в цифровом виде преобразуется в аналоговый вид с помощью цифроаналогового преобразователя. Результирующий опорный сигнал отфильтровывается посредством полосовой фильтрации для устранения влияний дискретизации сигнала. Как правило, с аналоговыми реализациями умножителей и делителей частоты могут также использоваться полосовой фильтр или фильтр нижних частот, поскольку в этих схемах могут иметь место нелинейности.
На Фиг. 6 проиллюстрирована структурная схема варианта реализации устройства для реконструкции полученного опорного сигнала и обнаружения магнитного или электрического поля в соответствии с вариантами реализации изобретения на Фиг. 1-4. Устройство, проиллюстрированное на Фиг. 6, может размещаться в приборе для измерения дальности как часть бурильной колонны в опорной скважине. На Фиг. 6 проиллюстрирован вариант использования синхронизирующего усилителя с опорным и зондирующим сигналами с целью увеличения отношения сигнал/шум выше возможного при известном уровне техники фильтрации зондирующих сигналов, при котором не используется опорный сигнал.
Структурная схема, проиллюстрированная на Фиг. 6, приводится исключительно для наглядности, поскольку опорный сигнал может быть реконструирован с использованием других вариантов реализации изобретения (например, цифрового), а также проиллюстрированные магнитометры могут быть заменены градиометрами для обнаружения электрического поля. В зависимости от требуемой степени детализации для обнаружения опорного сигнала в других вариантах реализации изобретения может использоваться различное число магнитометров и/или градиометров.
Обнаруженные устройством магнитные или электрические поля обусловлены полями, которые наводятся в целевой скважине в результате излучения зондирующего сигнала вниз по целевой скважине. Таким образом, сигнал, полученный в виде обнаруженного магнитного или электрического полей, может рассматриваться как сигнал, содержащий зондирующий сигнал в сочетании с помехами. Данные помехи могут отфильтровываться с помощью реконструированного опорного сигнала с целью генерирования отфильтрованного опорного сигнала, как описано ниже.
Устройство, проиллюстрированное на Фиг. 6, для генерирования фильтрующего элемента 602 (например, резонансного контура) содержит соленоидальную или тороидальную антенну 600, параллельно которой подключен конденсатор 601. Резонансная частота данного контура выбирается как частота f1 (т. е. частота основной гармоники) опорного сигнала. В другом варианте реализации изобретения в качестве фильтрующего элемента 602 может использоваться полосовой фильтр. Фильтрующий элемент предназначен для предотвращения искажения опорного сигнала зондирующим сигналом. Фильтрующий элемент 602 также служит для улучшения обнаружения опорного сигнала путем фильтрации помех вблизи опорной частоты.
Усилитель 603 соединен с выходом фильтрующего элемента 602, который может содержать резонансный контур или фильтр. Усиленный полученный сигнал с частотой f1 с выхода усилителя 603 подается на схему умножителя частоты 605, причем на выходе схемы умножения частоты сигнал имеет частоту n*f1, причем n является целым числом, как было описано выше. Выходной сигнал схемы умножителя 605 является входным сигналом схемы делителя частоты 607, которая генерирует сигнал с частотой n*f1/m, где m представляет собой целое число, как было описано выше. Поскольку n*f1/m = f0, генерируется сигнал точно такой же частоты, как у сигнала, излученного к целевой скважине. Если пренебречь задержкой распространения сигнала, которая является малой по сравнению со временем обнаружения сигнала, данный сигнал будет отслеживать медленный уход опорной частоты f0.
Из данного сигнала с частотой f0 генерируются три сигнала. Два из этих сигналов 610, 611 находятся в квадратуре. Другими словами, один сигнал может быть представлен в виде амплитуды, умноженной на сигнал синусоидальной формы с частотой f0 с определенным фазовым сдвигом, в то время как другой сигнал может быть представлен в виде амплитуды, умноженной на сигнал косинусоидальной формы с частотой f0 с тем же фазовым сдвигом (или сигналом синусоидальной формы с дополнительным фазовым сдвигом 90° по сравнению с первым сигналом синусоидальной формы). Третий сигнал 612, представленный в виде сигнала прямоугольной формы, генерируется контуром генератора интервала интегрирования 609, генерирующий прямоугольный сигнал с периодом, который является целым кратным 1/f0. Выходной сигнал 612 используется для выбора времени, в течение которого работают две схемы интегратора 642, 643 в каждом из множества синхронизирующих усилителей 620-623.
Два квадратурных сигнала 610, 611 подаются в качестве опорных сигналов на множество синхронизирующих усилителей 620-623. Также на каждый из синхронизирующих усилителей 620-623 подается выходной сигнал прямоугольной формы от контура генератора интервала интегрирования 609. Выходы 3-осевого магнитометра 630-633 соединены с соответствующими синхронизирующими усилителями 620-623.
Магнитометры 630-633 используются для обнаружения магнитного поля. По меньшей мере один магнитометр используется для обнаружения опорного сигнала, при этом для обнаружения зондирующего сигнала используется по меньшей мере один магнитометр (или по меньшей мере одним магнитный градиометр). Магнитометры 630-633 могут быть индукционными магнитометрами, магниторезистивными магнитометрами, свободными от спин-обменного уширения (SERF), или аналогичными атомными магнитометрами (или любыми другими устройствами аналогичного предназначения), а также индукторами или тороидами, которые используются для приема значений изменяющегося во времени магнитного поля. Опорный и зондирующий сигналы могут получаться одним(и) и тем(и) же магнитометром(ами). Магнитометры могут быть векторными магнитометрами (т. е., магнитометрами, имеющими предпочтительные оси чувствительности) или скалярными магнитометрами (например, магнитометрами, измеряющими величину магнитного поля). В некоторых применениях для измерения расстояния могут использоваться магнитометры с несколькими осями. Магнитометры, главным образом, связанные с обнаружением зондирующего сигнала, как правило, являются магнитометрами векторного типа.
Выходные сигналы синхронизирующих усилителей 620-623 подаются на один или более сигнальных процессоров 650-653 для мониторинга обнаруженных сигналов в опорной скважине с целью определения сравнительного расположения опорной скважины по отношению к целевой скважине на основании зависимости между обнаруженными магнитными полями (например, отфильтрованного опорного сигнала) на основе измерений, выполненных для множества точек в опорной скважине. В еще одном варианте реализации изобретения может использоваться только один сигнальный процессор, содержащий множество входов для обработки сигналов. В другом варианте реализации изобретения решение может приниматься на основании измерения в опорной скважине только одного градиента магнитного поля. Опорный сигнал может использоваться в качестве опорной частоты для синхронизирующих усилителей.
При работе с использованием, например, магнитометра 1 630 выходной сигнал первого магнитометра 630 усиливается и, насколько возможно, фильтруется с помощью полосового фильтра, после чего подается на пару смесителей 640, 641. На каждый смеситель 640, 641 подаются два входных сигнала, причем смеситель выполнен с возможностью перемножения этих двух входных значений для получения выходного сигнала. Вторым входным сигналом одного из смесителей является сигнал синусоидальной формы 610 с частотой f0, а вторым входным сигналом второго смесителя является косинусоидальный сигнал 611 с частотой f0. Чтобы лучше проиллюстрировать работу смесителей 640, 641, а затем интеграторов 642, 643 необходимо пояснить терминологию сигналов и формулы.
В качестве выходного сигнала магнитометра определим Sm, который используется в качестве одного входного сигнала смесителя:
Sm = Ar⋅sin(2π⋅f0⋅t+θ)+Nr(t)+Ni(t),
где Ar является амплитудой опорного сигнала, полученного прибором для измерения дальности, и может содержать коэффициент усиления;
f0 является частотой зондирующего сигнала в Гц;
t является интервалом времени в секундах;
θ является фазовым коэффициентом, связанным с начальной точкой отсчета времени и задержкой распространения сигнала от обсадной колонны целевой скважины до прибора для измерения дальности;
Nr(t) является помехами, которые получаются магнитометром; и
Ni(t) является аппаратным шумом, который вносится во входной сигнал смесителя электронными компонентами магнитометра.
Синусоидальный сигнал на входе смесителя Rs имеет вид:
RS=B⋅sin(2π⋅f0⋅t+φ)+N(t),
где B является амплитудой выходного сигнала синусоидальной формы схемы, которая реконструирует сигнал с частотой f0 из полученного сигнала с частотой f1;
φ является фазовым коэффициентом, подобным θ. Заметим, что φ и θ будут медленно меняться со временем, поскольку прибор для измерения дальности перемещается в скважине; и
N(t) является электронным шумом схемы, с помощью которой реконструируется сигнал с частотой f0.
Исходя из приведенных выше формул для Sm и RS, выходной сигнал первого смесителя определяется по формуле:

QUOTE
Согласно простому тригонометрическому тождеству, произведение двух компонентов с частотой f0 является константой + компонент с частотой f0 + компонент с частотой 2*f0. Отдельные составляющие шума умножаются на синусную и косинусную составляющие с частотой f0 или перемножаются. Аналогичным образом вычисляется выходной сигнал второго смесителя 641.
Затем выходные сигналы двух смесителей 640, 641 поступают на интеграторы 642, 643 и интегрируются в течение N тактов с периодом 1/f0, то есть в течение N/f0 секунд. При интегрировании в течение целого числа тактов с частотой f0 слагаемые с частотами f0 и 2*f0 становятся равными 0. Если шумы фактически являются случайными шумами, при этом только компонент, являющийся когерентным частоте f0, вносит вклад в интеграл, и, таким образом, шумовая составляющая от этих слагаемых значительно снижается. Аналогичным образом, если предположить, что составляющие шума не коррелированы, первое слагаемое, являющееся произведением составляющих шума, после интегрирования будет значительно уменьшаться. В результате остается только слагаемое QUOTE  как результат вышеприведенной формулы и аналогичное слагаемое QUOTE
как результат вышеприведенной формулы и аналогичное слагаемое QUOTE  от интегратора 643.
от интегратора 643.
Выходные сигналы интеграторов 642, 643 обнаруживаются с помощью электронной схемы по завершению периода N/f0, при этом интеграторы 642, 643 обнуляются, и начинается еще один период интегрирования N/f0 секунд (есть способы обработки данных выходных сигналов как аналоговых сигналов; в некоторых вариантах реализации изобретения для выполнения этой задачи наряду с аппаратным и программным обеспечением для обработки сигналов будет использоваться аналого-цифровой преобразователь).
Результирующие потоки дискретных данных содержат случайный шум, уменьшенный в корень квадратный из N раз, соответственно шуму во входных сигналах интеграторов 642, 643. Среднеквадратическая сумма выходных сигналов двух интеграторов 642, 643 будет пропорциональна выходному сигналу магнитометра 1 630, при этом с существенно сниженным уровнем шума. Отношение амплитуд двух сигналов интеграторов 642, 643 отображает некоторую информацию о распространении сигналов через толщу земли, но, как правило, не представляет интереса для измерения расстояния. В некоторых вариантах реализации изобретения с помощью скачкообразного изменения данного соотношения (которое является тангенсом фазы зондирующего сигнала относительно фазы реконструированного сигнала с частотой f0, используемой в качестве опорной) отображается значительное изменение в целевой скважине или значительное изменение в соотношении между целевой скважиной и прибором для измерения дальности, поскольку фаза или соотношение фаз могут мониториться.
В некоторых вариантах реализации изобретения все или часть синхронизирующих усилителей 620-623 могут быть реализованы с помощью аналого-цифровых преобразователей, а также цифровой обработки сигналов. В данном случае дискретизация должна выполняться с какой-то высокой кратной эталонной частотой f0, которая может формироваться с помощью другого умножителя частоты.
Критерий для определения разноса по частоте зондирующего и опорного сигналов, а также для определения стабильности осциллятора может определяться, как описано ниже.
Избирательность синхронизирующего усилителя может быть проанализирована путем вычисления его выходного сигнала в случае, если реконструированная опорная частота отличается от частоты сигнала на другом входе синхронизирующих усилителей 620-623 (в приведенном примере это выходной сигнал одного из других магнитометров 631-633).
Выходной сигнал синхронизирующего усилителя для двух таких сигналов проиллюстрирован на Фиг. 7 для времени интегрирования 1/f0, 10/f0, 100/f0 и 1,000/f0. С целью облегчения понимания данных сравнений в случае, если нет никакой разницы между сигналами, каждый выходной сигнал делится на выходной сигнал синхронизирующего усилителя. Абсцисса на Фиг. 7 является частичной разностью частот между двумя сигналами. Например, при значении по оси абсцисс 0,1 входной сигнал от магнитометра для измерения расстояния составляет 1,1*f0, а значение по оси абсцисс -,1 соответствует сигналу от магнитометра для измерения расстояния 0,9*f0. Как видно на чертеже, по мере увеличения времени интегрирования избирательность синхронизирующего усилителя резко возрастает.
На Фиг. 8 проиллюстрированы такие же кривые, но с уменьшенным диапазоном частот, который охватывает только 0,01 (нормализованный к f0) тех, что проиллюстрированы на Фиг. 7. Даже при более значительном уменьшении диапазона на Фиг. 8 кривую, соответствующую интегрированию более 1000 тактов, может быть трудно интерпретировать. Локальный максимум 0,01 возникает вблизи сдвига частоты 0,001 (т.е. 1,001* f0). То есть сигнал с частотой 1,001*<f0 уменьшается до 0,01 амплитуды, полученной с тем же сигналом, но с частотой f0. Это является подавлением на 40 дБ. При сдвиге частоты 0,01 (т. е. 1,01*f0) уровень сигнала снижается на 60 дБ. Для большинства применений для измерения расстояния целесообразно использовать время интегрирования 1000 тактов зондирующего сигнала. Например, в случае использования зондирующего сигнала с частотой 5 Гц время интегрирования 1000 циклов составляет 3 минуты 20 секунд. Могут использоваться более короткие значения времени интегрирования.
В типовом варианте реализации изобретения частота упомянутого осциллятора является достаточно стабильной, благодаря чему изменение амплитуды зондирующего сигнала на выходе синхронизирующего усилителя не изменяется меньше, чем 0,99 оптимального значения. Это соответствует сдвигу частоты ±,0000391*f0. Типовой зондирующий сигнал имеет частоту около 5 Гц. 1000 тактов при частоте 5 Гц будут длиться 200 секунд. Таким образом, для того чтобы произошел такой сдвиг частоты, тактовая частота должна иметь уход не менее чем 1 часть на миллион/секунду. Тактовые генераторы данного или лучшего качества являются общедоступными.
В некоторых вариантах реализации изобретения также учитывается влияние опорного сигнала с пониженной частотой на зондирующий сигнал в магнитометре, настроенном для получения зондирующего сигнала. То есть опорный сигнал может получаться одним или несколькими магнитометрами для измерения расстояния и может быть мощнее зондирующего сигнала на данных магнитометрах. Хотя опорный сигнал с пониженной частотой не является составной субгармоникой зондирующего сигнала, это не должно создавать проблем, поскольку принимаются меры для того, чтобы должным образом отделить частоту зондирующего сигнала (и частоту любой из его гармоник) от f0. В варианте реализации изобретения полосовой фильтр может быть установлен между каждым магнитометром для измерения расстояния и входами смесителей синхронизирующего усилителя.
В некоторых вариантах реализации изобретения также рассматриваются компоненты зондирующего сигнала, полученного магнитометром, используемого для получения сигнала с пониженной частотой, препятствующие искажению реконструированного сигнала с частотой f0. Это является важным, поскольку в противном случае в реконструированный сигнал частотой f0 может вноситься погрешность. При этом рекомендуется, чтобы антенна для получения опорного сигнала с пониженной частотой входила в резонанс с конденсатором или чтобы выходной сигнал антенны отфильтровывался с помощью полосового фильтра. Даже в том случае, если в некоторых вариантах реализации изобретения сигнал с пониженной частотой может быть мощнее зондирующего сигнала, сигнал с пониженной частотой и зондирующий сигнал должны быть разнесены на входе в часть системы, в которой реконструируется опорный сигнал с частотой f0.
В дополнение или в качестве альтернативы к использованию резонансного контура или фильтра в случае, если сигнал с пониженной частотой излучается вниз по обсадной колонне скважины, содержащей прибор для измерения дальности, данный сигнал будет распространяться до бурильной трубы в скважине и может быть обнаружен с помощью тороидальной антенны или как напряжение на резистивном разряднике. Тороид или резистивный разрядник могут быть не чувствительными ко многим формам зондирующих сигналов. В частности, они могут быть не чувствительными к сигналу, сгенерированному путем излучения тока по обсадной колонне целевой скважины, в случае, если опорная и целевая скважины приблизительно параллельны.
Ограничения при распространении сигналов через геологическую породу или обсадные колонны могут повлиять на выбор соответствующей частоты опорного и зондирующего сигнала, которые используются в конкретной области применения. Поскольку f1 << f0, затухание опорного сигнала на частоте f1 будет меньше, чем на частоте f0. Степень различия будет зависеть от конкретного варианта реализации, профиля скважины, удельных электрических сопротивлений пород и частот. Для следующих примеров рассмотрим систему, отличающуюся тем, что опорный сигнал генерируется с частотой 0,5882 Гц, частота зондирующего сигнала в целевой скважине составляет 5 Гц и оба сигнала излучаются к целевой скважине, при этом сигнал с частотой f1 возвращается к удаленной точке заземления.
На Фиг. 9 проиллюстрировано отношение амплитуд сигналов в приборе для измерения дальности для геологической породы с удельным электрическим сопротивлением 1 и 0,2 Ом на метр как функции расстояния от прибора для измерения дальности до целевой скважины. На данном чертеже предполагается, что с помощью обоих сигналов в целевой скважине наводятся одинаковые токи. В данном случае при расстоянии около 90 метров для удельного сопротивления 0,2 Ом на метр уровень сигнала с частотой 0,5882 Гц в 1,8 раза выше, чем сигнала с частотой 5 Гц. Для породы с удельным сопротивлением 1 Ом на метр уровень сигнала примерно в 1,7 раза выше, чем у зондирующего сигнала на расстоянии 200 метров. По мере уменьшения расстояния отношение уровней сигнала уменьшается. При этом отношение уровней сигнала является возрастающей функцией отношения f0/f1. Следовательно, можно увеличивать частоту осциллятора при уменьшении расстояния и таким образом обеспечивать лучшее, чем было бы возможно, разрешение.
На Фиг. 10 проиллюстрирован эффект от увеличения частоты зондирующего сигнала до 25 Гц. В прошлом из-за затухания было нежелательно увеличивать частоту зондирующего сигнала, даже если при увеличении частоты повышалось разрешение. В проиллюстрированном варианте реализации на дальности 90 метров отношение амплитуд опорного и зондирующего сигнала равняется 5,5 или 14,8 дБ, которое при использовании в схеме описанных ранее других фильтров может быть достаточным для обеспечения улучшенной характеристики при использовании синхронизирующего усилителя.
Если сигнал излучается таким образом, как показано в вариантах реализации изобретения, проиллюстрированных на Фиг. 3 или 4, анализ аналогичен используемому для электромагнитного (ЭМ) нисходящего телеметрического канала связи, причем отношение сигнала, полученного в качестве низкочастотного опорного сигнала, к зондирующему сигналу может быть значительно увеличено в вариантах реализации изобретения, в которых оба сигнала излучаются только в целевую скважину. Сигналы ЭМ нисходящего канала связи, как правило, могут получаться на глубине 3048 м (10000 футов). Каналы связи, как правило, являются наиболее помехоустойчивыми в случае, если для восходящего канала связи используется обсадная колонна второй скважины, как проиллюстрировано в варианте реализации на Фиг. 4.
В других вариантах реализации изобретения скважинный прибор для измерения дальности может быть выполнен с возможностью получения команд с поверхности земли и выбора различных фильтров таким образом, чтобы сделать возможной работу на различных частотах. С целью реализации данного варианта реализации изобретения опорный сигнал может модулироваться и передаваться по отдельному гидроимпульсному или ЭМ нисходящему каналу связи.
Возможны ситуации, когда уровень опорного сигнала не превышает уровня зондирующего сигнала. В данном случае, а также в случаях, если может быть определено, что синхронизирующий усилитель фактически может вносить шум в систему, для обнаружения такого фактора могут быть добавлены встроенные вычислительные средства таким образом, чтобы сигнал проходил в обход синхронизирующих усилителей.
Излучение сигнала в обсадную колонну является операцией, известной специалистам в данной области техники. Например, целевая скважина может иметь обсадную колонну. Целевая скважина может быть законсервированной или добывающей нефтяной или газовой скважиной, существующей в полевых условиях, бурения которой нужно избежать при бурении более новых скважин, или может быть существующей фонтанирующей скважиной, которая должна пересекаться скважиной для снятия давления на выбранной глубине ниже поверхности земли. Кроме того, скважина может быть представлена какой-нибудь другой аномалией, находящейся в земле, например электропроводящей геологической породой, бурильной колонной в необсаженной скважине, или другим электропроводящим материалом, который может быть целью для перехвата или уклонения. В рамках данного описания изобретения данный материал будет рассматриваться как целевая скважина.
В то время как в вышеприведенных вариантах реализации изобретения рассматривается излучение зондирующего сигнала в обсадную колонну целевой скважины, другие варианты реализации изобретения не ограничиваются данным способом излучения зондирующего сигнала. Например, зондирующий сигнал может излучаться с помощью кабеля или с помощью электромагнита.
В большинстве случаев на самой нижней подсекции бурильной колонны находится буровое долото. Подсекция бурового долота может содержать отклоняющий переводник, который отклоняет буровое долото относительно продольной оси бурильной колонны, благодаря чему возможно изменение направления бурения, или прямую секцию для бурения в одном направлении. При использовании отклоняющего переводника можно управлять направлением бурения путем вращения бурильной колонны над устьем скважины, вращая, таким образом, отклоняющий переводник.
Как известно, буровое долото может приводиться в движение с помощью двигателя, который, в свою очередь, приводится в движение потоком бурового раствора, протекающего по каналу бурильной колонны. Буровой раствор вытекает из бурильной колонны в отклоняющий переводник и в пространство вокруг бурового долота, а затем протекает вверх и наружу из скважины через затрубное пространство бурильной колонны, при этом измельченная с помощью бурения порода выносится из скважины наверх и наружу через выходной патрубок.
В канале бурильной колонны может размещаться детектор переменного магнитного поля или магнитометр. Детектор может быть выполнен с возможностью обнаружения переменных магнитных полей, возникающих в земле вокруг цели, при протекании переменного тока, наведенного в электропроводящем материале (например, обсадной колонне) целевой скважины. Данный ток может наводиться с помощью электрода, расположенного на поверхности земли очень близко или имеющего электрический контакт с обсадной колонной. С помощью электрода вызывается протекание тока I в электропроводящей целевой обсадной колонне, при этом с помощью данного тока, протекающего вертикально, вокруг обсадной колонны создается магнитное поле. Силовые линии магнитного поля перпендикулярны к протекающему току I, и, таким образом, как правило, в случае, если скважина является вертикальной, являются горизонтальными. Поле выходит наружу из обсадной колонны целевой скважины на расстояние, зависящее от величины протекающего тока и свойств слоев, окружающих целевую скважину, а также рельефа скважины.
Электрод, который может быть электропроводящим стержнем, расположенным в земле вблизи устья скважины, или соединителем для подключения кабеля к металлической обсадной колонне, подключается к источнику переменного тока (AC) с помощью кабеля. Другая сторона источника переменного тока подключается к точке заземления в месте, расположенном вдали от целевой скважины на расстоянии, достаточном для того, чтобы гарантировать протекание тока преимущественно в обсадную колонну. Поскольку ток протекает вниз по обсадной колонне, он будет постепенно растекаться наружу в прилегающую толщу земли и возвратится к заземленному электроду, но поскольку ток, протекающий в обсадной колонне, является высококонцентрированным по сравнению с током, протекающим через толщу земли, будет преобладать магнитное поле, генерируемое током в обсадной колонне, и будет обнаруживаться с помощью магнитометра.
Магнитный градиометр, который может быть высокочувствительным детектором магнитного поля, содержит пару датчиков поля, причем каждый из них имеет два разнесенных параллельных сердечника магнитопровода. Сердечниками магнитопровода могут быть ферритовые стержни длиной в несколько дюймов с намотанными соответствующими соленоидальными обмотками. Магнитный градиометр может располагаться в подходящем корпусе в центральном отверстии бурильной колонны, но, как вариант, может устанавливаться на внешней поверхности бурильной колонны на уменьшенных площадках или выемках, выполненных на наружной поверхности бурильной колонны. В данной последней конфигурации два сердечника магнитопровода каждого датчика устанавливаются на диаметрально противоположных сторонах колонны так, что они отстоят друг от друга на расстоянии, приблизительно равном диаметру бурильной колонны. При любом расположении два сердечника магнитопровода каждого датчика имеют свои оси максимальной чувствительности, параллельные друг другу и перпендикулярные к оси бурильной колонны, при этом оси максимальной чувствительности двух датчиков расположены перпендикулярно друг к другу.
В случае если выполняется бурение скважины для снятия давления, скважину изначально направляют в сторону целевой скважины с помощью широко известных способов. Магнитометр может располагаться внутри бурильной колонны или на ее поверхности и функционирует во время бурения, хотя для наибольшей точности, как правило, операция бурения кратковременно останавливается для проведения измерений. Помимо других применений, описанных в данной заявке, информация, полученная от магнитометра, может использоваться для управления направленным бурением скважины для снятия давления (как опорной скважины).
На Фиг. 11 проиллюстрирован вариант реализации системы буровой установки 1164, который может включать вышеописанные варианты реализации изобретения. Таким образом, система 1164 может содержать части скважинного прибора 1124 в контексте процесса бурения скважины.
Бурение нефтяных и газовых скважин обычно осуществляется с использованием колонны бурильных труб, соединенных между собой, для образования бурильной колонны, которая опускается через роторный стол 1110 в ствол скважины или скважину 1112. Система 1164 может состоять из части буровой вышки 1102, расположенной на поверхности 1104 скважины 1106. Буровая вышка 1102 выполнена с возможностью обеспечения опоры для бурильной колонны 1108. Бурильная колонна 1108 в процессе работы может проходить через роторный стол 1110 с целью бурения скважины 1112 через подземные геологические породы 1114. Бурильная колонна 1108 может содержать ведущую трубу 1116, бурильную трубу 1118 и компоновку низа бурильной колонны 1120, расположенную в нижней части бурильной трубы 1118. В некоторых вариантах реализации изобретения устройство прибора для измерения дальности 103, 203, 303, 403, проиллюстрированное на Фиг. 1, 2, 3, 4 соответственно, может быть выполнено в виде части бурильной колонны 1108 или скважинного прибора 1124.
Компоновка низа бурильной колонны 1120 может содержать утяжеленные бурильные трубы 1122, скважинный прибор 1124, а также буровое долото 1126. Буровое долото 1126 выполнено с возможностью создания скважины 1112 путем прохождения через поверхность 1104 и подземные геологические породы 1114. Скважинный прибор 1124 может содержать любое количество инструментов различных типов, включая инструменты MWD (измерения в процессе бурения), инструменты LWD (каротажа в процессе бурения) и другие.
Во время операций бурения бурильная колонна 1108 (как правило, содержит ведущую трубу 1116, бурильную трубу 1118, а также компоновку низа бурильной колонны 1120) может вращаться с помощью роторного стола 1110. В дополнение или в качестве альтернативы, компоновка низа бурильной колонны 1120 также может приводиться во вращение с помощью двигателя (например, забойного двигателя), расположенного над забоем скважины. С целью увеличения веса на буровое долото 1126 могут использоваться утяжеленные бурильные трубы 1122. Утяжеленные бурильные трубы 1122 могут также служить для увеличения жесткости компоновки низа бурильной колонны 1120, благодаря чему с помощью компоновки низа бурильной колонны 1120 переносится дополнительный вес на долото 1126, а также, в свою очередь, облегчается прохождение бурового долота 1126 через поверхностные 1104 и подземные породы 1114.
Во время операций бурения буровой насос 1132 может перекачивать буровой раствор (иногда называемый специалистами в данной области техники “буровой грязью”) из грязевой ямы 1134 через шланг 1136 в бурильную трубу 1118 и вниз к бурильному долоту 1126. Буровой раствор может вытекать из бурового долота 1126 и возвращаться на поверхность 1104 через затрубное пространство 1140 между бурильной трубой 1118 и стенкой скважины 1112. Буровой раствор затем может возвращаться в грязевую яму 1134, в которой фильтруется данный раствор. В некоторых вариантах реализации изобретения буровой раствор может использоваться для охлаждения бурового долота 1126, а также для смазки бурового долота 1126 во время бурения. Кроме того, буровой раствор может использоваться для удаления осколков подземной породы 1114, образованных во время работы бурового долота 1126.
Сопроводительные чертежи, составляющие его часть, не ограничивающим образом изображают частные варианты реализации, посредством которых объект изобретения может быть реализован. Изображенные варианты реализации описаны достаточно подробно для того, чтобы специалисты в данной области техники могли использовать раскрытые в настоящем описании объекты. Могут использоваться другие варианты реализации изобретения, а также производные от них, причем структурные и логические изменения могут осуществляться без выхода за пределы объема данного изобретения. Следовательно, подробное описание не должно рассматриваться как имеющее ограничительный характер, а объём различных вариантов реализации определяется исключительно прилагаемой формулой изобретения, а также полным объемом эквивалентов, которые может включать данная формула изобретения.





Генерируются зондирующий и опорный сигналы. Опорный сигнал имеет более низкую частоту, чем зондирующий сигнал. Опорный сигнал передается через геологическую породу для приема прибором для измерения дальности в опорной скважине, причем зондирующий сигнал излучается вниз по целевой скважине. Опорный сигнал реконструируется в опорной скважине, а также сигнал, являющийся комбинацией зондирующего сигнала, излученного из целевой скважины, и помех, полученных в опорной скважине. Полученный сигнал может представлять собой значения магнитного или электрического поля или изменения в этих полях. Реконструированный опорный сигнал в сочетании с полученным сигналом используется для получения отфильтрованного зондирующего сигнала. Затем на основе отфильтрованного зондирующего сигнала может быть определено относительное положение целевой скважины относительно опорной скважины. Информация о местоположении может использоваться для операций направленного бурения. Технический результат, достигаемый изобретением, – повышение точности определения расстояния между опорной и целевой скважиной, расширение диапазона, в котором целевая скважина может быть точно обнаружена, для планирования пересечения или предотвращения пересечения стволов скважин.4 н. и 24 з.п. ф-лы, 11 ил.
1. Способ определения расстояния между целевой скважиной и опорной скважиной, включающий:
генерирование тактового сигнала;
генерирование зондирующего сигнала из тактового сигнала;
генерирование опорного сигнала из тактового сигнала;
излучение зондирующего сигнала из целевой скважины;
передачу опорного сигнала;
получение опорного сигнала первым приемником в опорной скважине;
реконструкцию тактового сигнала в качестве реконструированного тактового сигнала;
использование одного из первого приемника или второго приемника в опорной скважине, причем получаемый сигнал является комбинацией шума и зондирующего сигнала, излученного из целевой скважины;
фильтрацию зондирующего сигнала с использованием реконструированного тактового сигнала в комбинации с полученным сигналом и
определение положения целевой скважины относительно опорной скважины на основании отфильтрованного зондирующего сигнала.
2. Способ по п. 1, отличающийся тем, что реконструкция тактового сигнала включает:
прием распространяемого опорного сигнала;
генерирование пары квадратурных сигналов из полученного распространяемого опорного сигнала и
генерирование сигнала прямоугольной формы из полученного распространяемого опорного сигнала.
3. Способ по п. 2, дополнительно включающий интегрирование магнитного поля в течение периода времени, определяемого прямоугольным сигналом.
4. Способ по п. 3, отличающийся тем, что период времени содержит целое число, кратное обратной величине частоты основной гармоники тактового сигнала.
5. Способ по п. 1, дополнительно включающий управление направлением бурового долота во время бурения опорной скважины в зависимости от относительного положения.
6. Способ по п. 1, отличающийся тем, что генерирование опорного сигнала включает:
умножение частоты тактового сигнала на целое число m для получения результирующего значения и
деление результата вычисления на целое число n для получения опорного сигнала, причем m/n<1.
7. Способ по п. 1, дополнительно включающий мониторинг магнитного поля, сгенерированного в целевой скважине в ответ на зондирующий сигнал, с использованием одного из магнитометра или градиометра в опорной скважине.
8. Способ по п. 1, отличающийся тем, что передача опорного сигнала включает излучение опорного сигнала внутрь поверхности геологического массива, содержащей целевую скважину и опорную скважину.
9. Способ по п. 8, отличающийся тем, что излучение опорного сигнала внутрь поверхности включает излучение опорного сигнала при помощи рамочной антенны, сопряженной с поверхностью.
10. Способ по п. 8, отличающийся тем, что излучение опорного сигнала внутрь поверхности включает излучение опорного сигнала при помощи множества заземляющих контактов, сопряженных с поверхностью.
11. Способ по п. 1, дополнительно включающий:
излучение опорного сигнала в устье скважины обсадной колонны в опорной скважине;
генерирование сигнала, который содержит опорный сигнал и зондирующий сигнал, путем суммирования опорного сигнала и тактового сигнала и
излучение сигнала, содержащего опорный сигнал и зондирующий сигнал, в устье скважины обсадной колонны в целевой скважине.
12. Система определения расстояния между целевой скважиной и опорной скважиной, содержащая:
контур генератора сигналов, предназначенный для генерирования как зондирующего сигнала, так и опорного сигнала на основании тактового сигнала, при этом зондирующий сигнал имеет первую частоту, а опорный сигнал имеет вторую частоту, причем зондирующий сигнал излучается в направлении целевой скважины, и при этом вторая частота меньше первой частоты;
скважинный прибор;
по меньшей мере одно из: магнитометр или градиометр, зафиксированный на скважинном приборе, причем по меньшей мере один из магнитометра или градиометра выполнен с возможностью обнаружения сигналов в виде значений магнитного или электрического поля или изменений магнитного или электрического поля, которые в комбинации с реконструированным опорным сигналом вырабатывают отфильтрованный зондирующий сигнал в ответ на зондирующий сигнал, излученный в направлении целевой скважины; и
сигнальный процессор для мониторинга обнаруженных сигналов в опорной скважине для определения сравнительного положения опорной скважины по отношению к целевой скважине на основании отфильтрованного зондирующего сигнала.
13. Система по п. 12, отличающаяся тем, что генератор сигналов содержит осциллятор для генерирования тактового сигнала.
14. Система по п. 13, дополнительно содержащая контур масштабирования частоты, соединенный с осциллятором, для генерирования опорного сигнала посредством умножения тактового сигнала на целое число m и деления на целое число n для вырабатывания опорного сигнала, отличающегося тем, что m/n<1.
15. Система по п. 14, дополнительно содержащая передатчик опорного сигнала, соединенный с контуром масштабирования частоты.
16. Система по п. 15, отличающаяся тем, что передатчик опорного сигнала содержит по меньшей мере одно из: петлевая антенна, множество дипольных антенн, усилитель мощности, который может использоваться для сопряжения контура масштабирования частоты с обсадной колонной опорной скважины, или суммирующий усилитель, соединенный с контуром синхронизации, а также схему изменения частоты для генерирования сигнала, содержащего опорный сигнал и зондирующий сигнал, посредством суммирования опорного сигнала и тактового сигнала.
17. Устройство определения расстояния между целевой скважиной и опорной скважиной, содержащее:
схему реконструкции для получения сигнала и генерирования реконструированного опорного сигнала из полученного сигнала, причем реконструированный опорный сигнал основан на тактовом сигнале;
по меньшей мере одно из: магнитометр или градиометр для соединения со схемой реконструкции, причем по меньшей мере один из магнитометра или градиометра выполнен с возможностью обнаружения сигналов в виде значений магнитного или электрического поля или изменений магнитного или электрического поля, которые в комбинации с реконструированным опорным сигналом вырабатывают отфильтрованный зондирующий сигнал в ответ на зондирующий сигнал, излученный в направлении целевой скважины; и
сигнальный процессор, соединенный по меньшей мере с одним магнитометром или градиометром, для мониторинга обнаруженных сигналов в опорной скважине для определения положения опорной скважины относительно целевой скважины на основании отфильтрованного зондирующего сигнала.
18. Устройство по п. 17, отличающееся тем, что схема для приема сигнала и генерирования реконструированного опорного сигнала содержит один резонансный контур или полосовой фильтр для отфильтровывания шума из опорного сигнала.
19. Устройство по п. 17, отличающееся тем, что схема для приема сигнала и генерирования реконструированного опорного сигнала содержит резонансный контур, содержащий подключенный параллельно конденсатор, для отфильтровывания шума из опорного сигнала.
20. Устройство по п. 18, отличающееся тем, что схема для приема сигнала и генерирования реконструированного опорного сигнала содержит:
схему умножителя частоты, соединенную с одним резонансным контуром или полосовым фильтром, для умножения частоты полученного сигнала на целое число n для получения результирующего значения и
схему делителя частоты для деления результирующей частоты на целое число m, где m/n<1.
21. Устройство по п. 20, дополнительно содержащее генератор интервала интегрирования, соединенный со схемой делителя частоты, для генерирования интегрированного сигнала, при этом интегрированный сигнал является производным от реконструированного опорного сигнала в течение периода времени 1/ƒ0, где ƒ0 является частотой основной гармоники опорного сигнала.
22. Устройство по п. 21, дополнительно содержащее синхронизирующий усилитель, соединенный по меньшей мере с одним магнитометром или градиометром, а также схему реконструкции для генерирования отфильтрованного зондирующего сигнала на основании обнаруженных сигналов, представляющих значения магнитного или электрического поля или изменения магнитного или электрического поля, или сигналов градиометра, сгенерированных в ответ на зондирующий сигнал, излучаемый в направлении целевой скважины.
23. Устройство по п. 21, дополнительно содержащее:
по меньшей мере один аналого-цифровой преобразователь, соединенный по меньшей мере с одним магнитометром или градиометром, а также схемой реконструкции; и
цифровой сигнальный процессор, соединенный по меньшей мере с одним аналого-цифровым преобразователем, для генерирования отфильтрованного зондирующего сигнала на основании обнаруженных сигналов, представляющих собой значения магнитного или электрического поля или изменения магнитного или электрического полей.
24. Устройство по п. 17, дополнительно содержащее полосовой фильтр, соединенный с выходом по меньшей мере одного магнитометра или градиометра, для устранения влияний опорного сигнала из обнаруженных сигналов.
25. Устройство по п. 17, отличающееся тем, что устройство соединено с корпусом прибора, спускаемого в скважину на тросе.
26. Передающее устройство определения расстояния между целевой скважиной и опорной скважиной, содержащее:
схему осциллятора для генерирования тактового сигнала, имеющего тактовую частоту;
контур масштабирования частоты, соединенный со схемой осциллятора, которая генерирует опорный сигнал, имеющий более низкую частоту, чем тактовая частота;
схему генерирования зондирующего сигнала, соединенную со схемой осциллятора, для генерирования зондирующего сигнала, имеющего тактовую частоту, причем зондирующий сигнал излучается в направлении целевой скважины; и
схему передатчика, соединенную с контуром масштабирования частоты, выполненную с возможностью передачи опорного сигнала на поверхность геологического массива.
27. Передающее устройство по п. 26, отличающееся тем, что схема передатчика является рамочной антенной, сопряженной с поверхностью.
28. Передающее устройство по п. 26, отличающееся тем, что схема передатчика является множеством дипольных антенн, сопряженных с поверхностью.
| US 5343152 A, 30.08.1994RU 2468200 C2, 27.11.2012RU 2342527 C2, 27.12.2008RU 2541990 C1, 20.02.2015. |

