В данной заявке заявлен приоритет по предварительной заявке на патент США №61/734711, под названием "SYSTEM FOR DRILLING PARALLEL WELLS FOR SAGD APPLICATIONS", поданной 7 декабря 2012 года, в которой указан Артур Ф. Куке (Arthur F. Kuckes) как автор изобретения, содержание которой включено в данный документ в полном объеме посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение в целом относится к работам по бурению скважин и, в частности, к способам и системам сопровождения бурения нескольких скважин относительно друг друга. Более предпочтительно варианты реализации данного изобретения относятся к способам и системам определения относительного положения целевой скважины, в которой выполняют бурение, с применением магнитного градиентометра в скважине, в которой выполняют бурение, а также к оптимальному размещению электродов эмиттера и возвратных электродов для улучшения определение расстояния по магнитному полю.
УРОВЕНЬ ТЕХНИКИ
Поскольку легкодоступные и легкодобываемые ресурсы углеводородного сырья истощаются, существует повышенный спрос на более усовершенствованные методы добычи. Одним из таких методов является парогравитационный дренаж (ПГД), метод, при котором применяют пар в связи с двумя стволами скважины, расположенными на расстоянии друг от друга. В частности ПГД решает задачу подвижности тяжелой нефти в пласте путем закачки в пласт пара при высоком давлении и высокой температуре или пара высоких параметров. Этот пар высоких параметров снижает вязкость тяжелой нефти с целью повышения добычи. Закачку пара в пласт производят из первой скважины (нагнетательной скважины), которая пробурена выше и параллельно второй скважине (добывающей скважине). Когда вязкость тяжелой нефти в пласте вокруг первой скважины уменьшается, тяжелая нефть стекает в расположенную ниже вторую скважину, из которой данную нефть добывают. Предпочтительно обе скважины бурят на расстоянии всего лишь нескольких метров друг от друга. Размещать нагнетательную скважину необходимо с очень небольшим интервалом расстояния. Если нагнетательная скважина расположена слишком близко к добывающей скважине, добывающая скважина подвергалась бы воздействию очень высоких давления и температуры. Если нагнетательная скважина расположена слишком далеко от добывающей скважины, снижается эффективность метода ПГД. С целью оказания помощи в обеспечении того, чтобы вторую скважину пробурили и разместили на необходимом расстоянии относительно первой скважины, нередко проводят исследование обеих скважин в пласте. Эти методы исследований традиционно называют "определением расстояния".
Одно из решений, издавна задействованных при определении расстояния, состоит в применении дальномерных устройств для непосредственного определения и измерения расстояния между двумя скважинами, когда последняя скважина просверлена. Известные двухскважинные коммерческие методы, при которых применяют оборудование в обеих скважинах (нагнетательной и добывающей), основаны либо на методах вращающихся магнитов, либо на методах наведения по магнитному полю. Однако эти методы являются нежелательными, поскольку требуют двух отдельных и различных бригад для управления оборудованием в каждой скважине, а именно каротажной бригады на добывающей скважине и бригады каротажа в процессе бурения на нагнетательной скважине, что экономически не рентабельно. При одном методе известного уровня техники применяют оборудование только в одной скважине (нагнетательной скважине) для передачи тока в целевую скважину (добывающую скважину), после чего делают абсолютное измерение магнитного поля для расчета расстояния.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует буровую систему ПГД в соответствии с определенными иллюстративными вариантами реализации данного изобретения;
Фиг. 2А иллюстрирует схематичный вид переводника скважинного датчика в соответствии с иллюстративным вариантом реализации данного изобретения;
Фиг. 2В и 2С иллюстрируют вид в поперечном сечении переводника скважинного датчика вдоль линий В и С на Фиг. 2А соответственно;
Фиг. 2D иллюстрирует вид в поперечном сечении датчика по оси z;
Фиг. 3 иллюстрирует схематическое отображение соответствующих значений электромагнитного поля и определений символов в соответствии с определенными иллюстративными вариантами реализации данного изобретения;
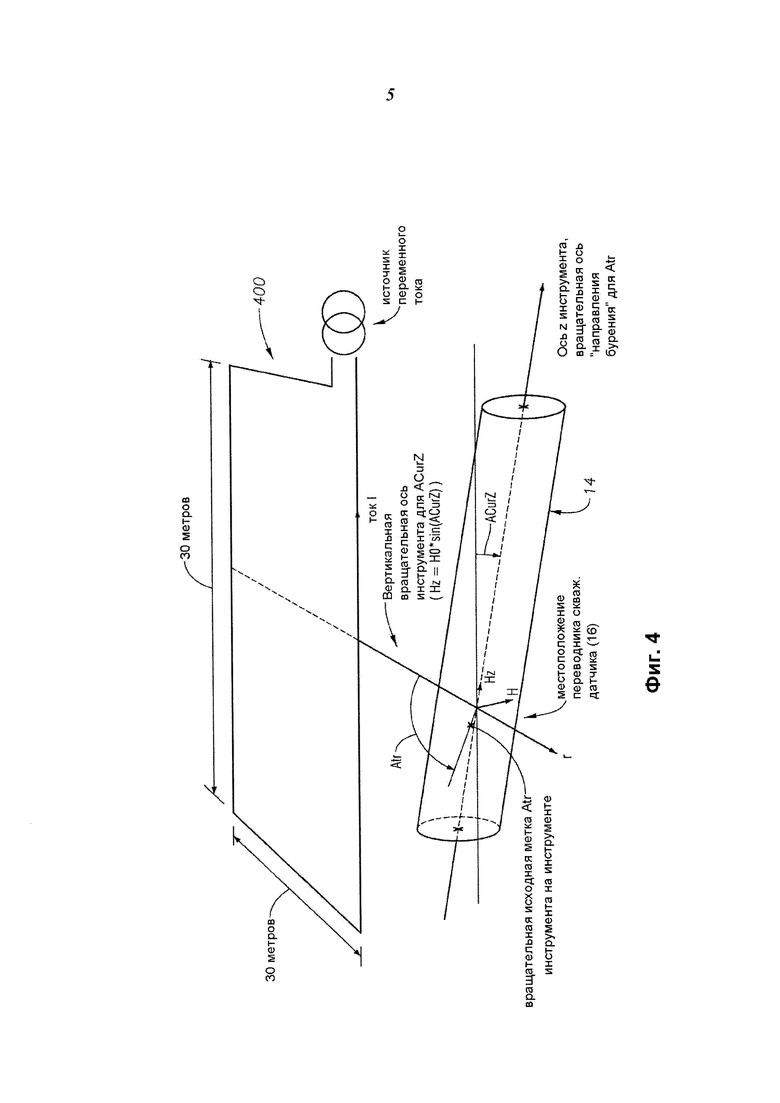
Фиг. 4 иллюстрирует компоновку низа бурильной колонны и устройство для калибровки инструмента градиента магнитного поля в переводнике скважинного датчика в соответствии с определенными иллюстративными вариантами реализации данного изобретения;
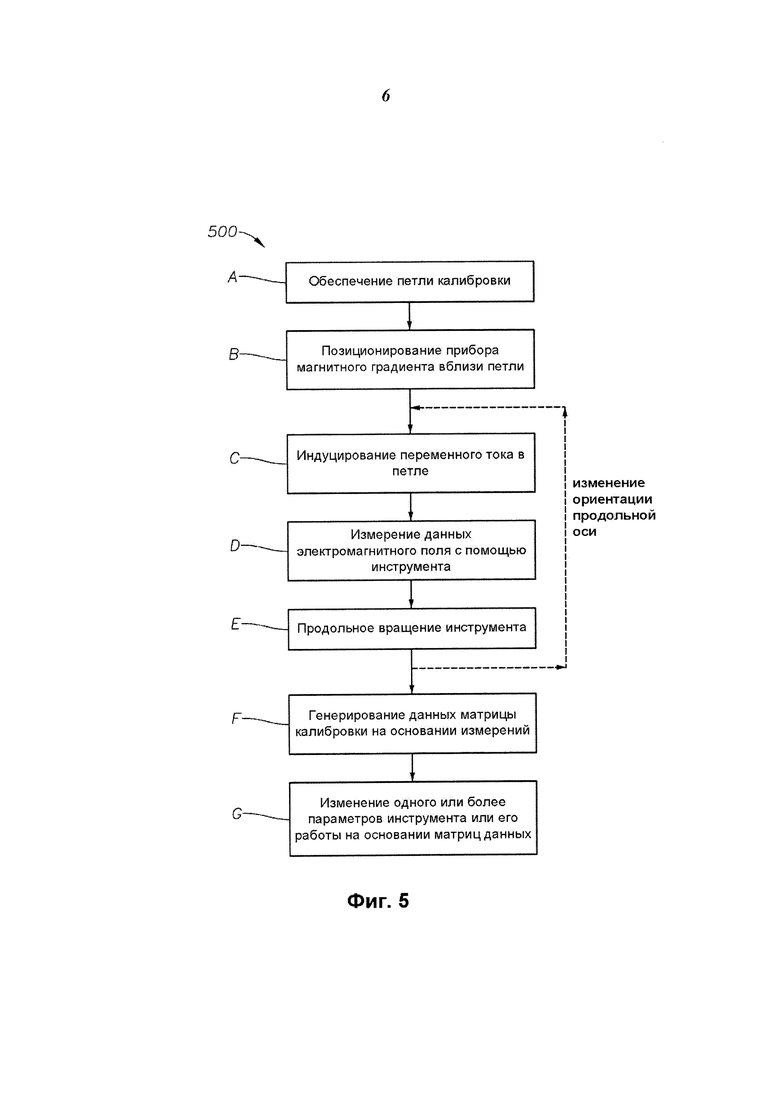
Фиг. 5 иллюстрирует блок-схему калибровочного способа, применяемого к инструменту градиента магнитного поля в соответствии с определенными иллюстративными способами данного изобретения; и
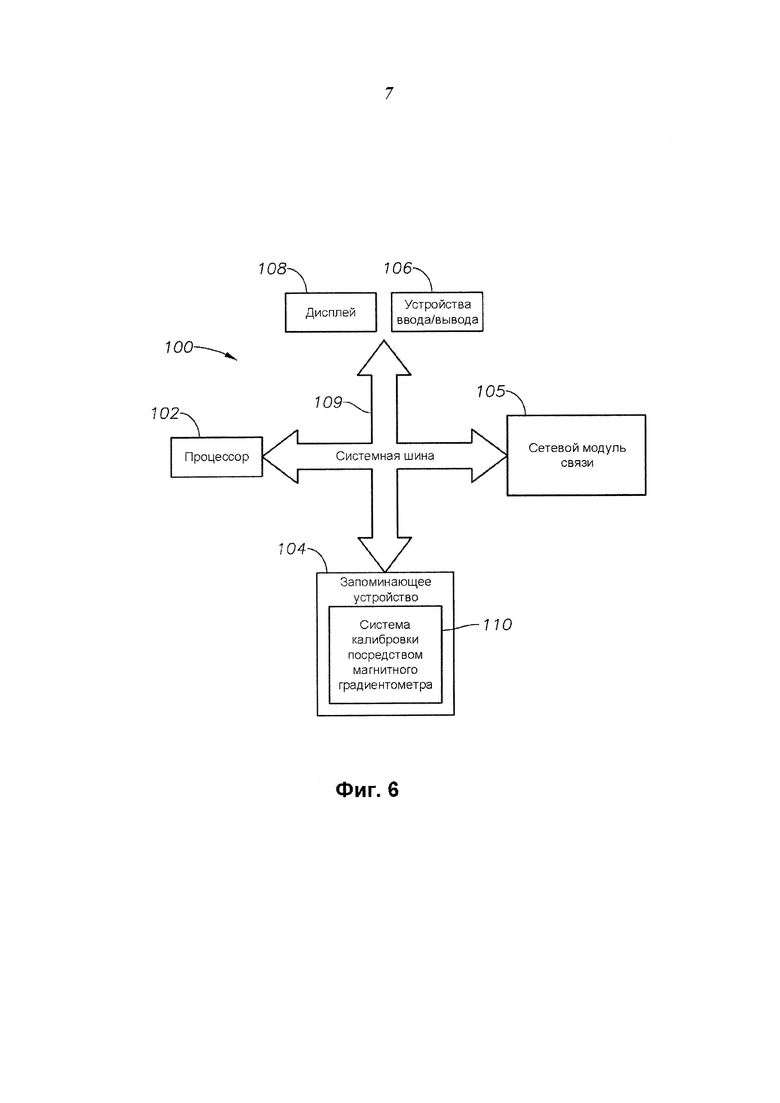
Фиг. 6 иллюстрирует блок-схему компьютерной системы для реализации системы калибровки посредством магнитного градиентометра в соответствии с определенными иллюстративными вариантами реализации данного изобретения.
ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Далее описаны иллюстративные варианты реализации изобретения и связанные с ними методики в соответствии с данным изобретением, так как они могут быть применены в системе определения расстояния и способе сопровождения бурения нескольких скважин относительно друг друга. В целях ясности в этом документе описаны не все особенности фактической реализации изобретения или методики. Следует, конечно же, иметь в виду, что при разработке любого такого фактического варианта реализации изобретения необходимо принять ряд специфичных для варианта реализации изобретения решений для достижения конкретных целей разработчиков, таких как соответствие связанным с системой или бизнесом ограничениям, которые будут отличаться в различных вариантах реализации изобретения. Кроме того, следует иметь в виду, что такая разработка может быть сложной и затратной по времени, но, тем не менее, не будет представлять сложности для специалистов в данной области техники, извлекающих пользу из ознакомления с данным описанием. Дальнейшие аспекты и преимущества различных вариантов реализации изобретения и связанных с ними методик по данному изобретению станут очевидными из рассмотрения нижеследующего описания и чертежей.
В вышеизложенном описании изобретения могут повторяться номера и/или буквы позиций различных примеров. Это повторение предусмотрено для простоты и ясности и само по себе не устанавливает взаимосвязь между различными описанными вариантами реализации изобретения и/или конфигурациями. К тому же пространственно относительные термины, такие как "под", "ниже", "нижний", "выше", "в верх скважины", "в глубь скважины", "перед (чем-то)", "на выходе (из чего-то)" и тому подобное, могут использоваться в данном документе для простоты описания для описания отношения одного элемента или функции к другому (другим) элементу (элементам) или функции (функциям), как проиллюстрировано на чертежах. Пространственно относительные термины предназначены для охвата различных ориентаций устройства в применении или эксплуатации в дополнение к ориентации, проиллюстрированной на чертежах. Например, если устройство на чертежах переворачивают, элементы, описанные как расположенные "ниже" или "под" другими элементами или функциями, будут ориентированы "над" этими другими элементами или функциями. Таким образом, типовой термин "ниже" может охватывать ориентацию как выше, так и ниже. Устройство может быть ориентировано иным образом (повернуто на 90 градусов или иметь другие ориентации), и пространственно относительные термины, используемые в данном документе, также могут быть интерпретированы соответствующим образом.
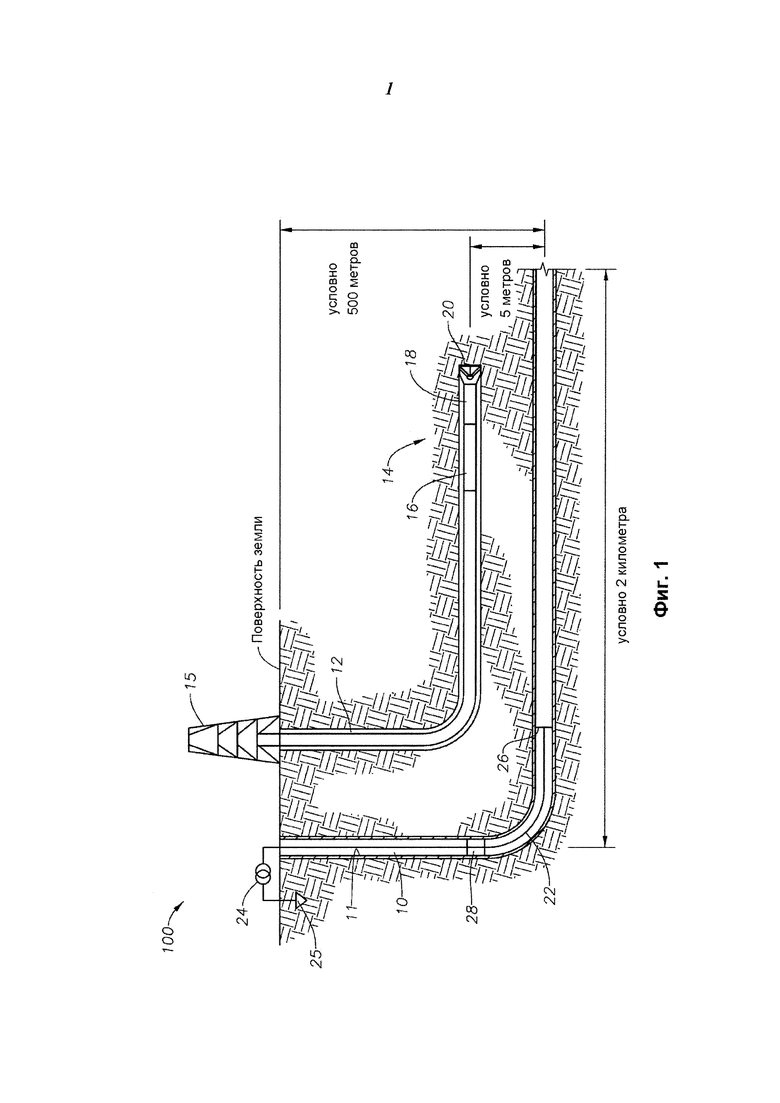
Фиг. 1 иллюстрирует буровую систему ПГД 100 в соответствии с иллюстративным вариантом реализации данного изобретения. В этом варианте реализации изобретения целевую скважину 10 бурят с применением любого подходящего метода бурения. Соответственно, целевую скважину 10 обсаживают обсадной колонной 11. Затем бурят нагнетательную скважину 12 с применением КНБК 14, который простирается от башенной вышки 15, как понимают в данной области техники. КНБК 14 может представлять собой, например, компоновку каротажа в процессе бурения ("КПБ"), компоновку измерений в процессе бурения ("ИПБ") или другую требуемую буровую компоновку. Соответственно, КНБК 14 дополнительно содержит буровой двигатель 18 и буровое долото 20. Хотя нагнетательную скважину 12 описывают как впоследствии пробуренную, в других вариантах реализации изобретения целевую скважину 10 и нагнетательную скважину 12 могут бурить одновременно. Кроме того, в еще одном альтернативном варианте реализации изобретения КНБК 14 может быть реализована как применение с каротажной проволокой (без буровой компоновки), выполняющее каротажные работы, что будет понятно тем же специалистам в данной области техники, указанным в данном документе. В этом типовом варианте реализации изобретения КНБК/буровая компоновка 14 содержит переводник скважинного датчика 16, содержащий один или более электромагнитных датчиков и компоновку схем для передачи данных на поверхность и с поверхности, как будет описано более подробно ниже.
В целом способ в соответствии с данным изобретением включает генерирование низкочастотного переменного тока на обсадной колонне 11 целевой скважины 10 путем прямого подключения целевой скважины 10 к источнику электрического тока (например, источнику питания переменного тока) во время периодических перерывов в бурении скважины, в которой выполняют бурение, т.е. нагнетательной скважины 12. Во время этих перерывов измерения проводят на нескольких выбранных интервалах глубины с помощью инструментов вблизи бурового долота 20 в нагнетательной скважине 12, при этом измерения включают величину, направление и радиального градиента магнитного поля, создаваемого протеканием тока по целевой скважине 10. В то же самое время выполняют измерения величины и направления магнитного поля Земли и направления силы притяжения в скважине, в которой выполняют бурение, например, с помощью инструмента ИПБ (измерение в процессе бурения) вдоль КНБК 14 для определения угла крена и наклона буровой скважины. Включая информацию, полученную благодаря стандартным измерениям ИПБ, расстояние и направление между нагнетательной скважиной 12 и целевой скважиной 10, а также направление бурения влево/вправо (если скважины находятся в приблизительно вертикальной плоскости по отношению друг к другу) можно определить, применяя описанные устройство и способ.
Более предпочтительно и в соответствии с определенными иллюстративными вариантами реализации данного изобретения, электрический ток вырабатывается в обсадной колонне 11 целевой скважины 10 путем подачи изменяющегося по времени тока посредством использования источника электрического тока (например, электрода (не проиллюстрирован)), размещенного в целевой скважине 10, или путем непосредственного соединения с расположением либо на поверхности, либо в глубине этой скважины, как проиллюстрировано на Фиг. 1. Ток, вернувшийся на земную поверхность, подают либо путем применения соединения 22 на поверхностный электрод 24 или в находящееся поблизости устье скважины. Соединение 22 может представлять собой, например, изолированный кабельный соединительный электрод 24 (или, например, какой-либо другой источник переменного тока) для электрического соединения 26, подключенного к обсадной колонне 11. Ток, подаваемый в целевую скважину 10, вытекает экспоненциально с некоторым расстоянием от места подачи. Если ток подают в устье скважины, он вытекает экспоненциально из этого места. Если ток подают в скважину 10 от скважинного электрода, ток вытекает в обоих направлениях от этого места, и результирующий ток, доступный для генерирования электромагнитного поля, могут вычислить с помощью известных принципов.
Для усиления тока, подаваемого в целевую скважину 10 вблизи глубины измерения, в эту скважину могут включить изолирующую секцию 28, как проиллюстрировано на Фиг. 1, либо с одной (как проиллюстрировано), либо с обеих сторон (не проиллюстрировано) целевой области исследования. Таким образом, в одном предпочтительном варианте реализации изобретения непроводящий элемент, изолятор, зазор или изолирующая секция обсадной колонны могут быть размещены в целевой скважине перед точкой подачи тока, таким образом выступая в качестве изолирующей секции 28.
Измерительный прибор электромагнитного поля, размещенный в переводнике скважинного датчика 16, чрезвычайно чувствителен к электромагнитным полям и, самое главное, к радиальному градиенту электромагнитного поля в скважине, в которой выполняют бурение (т.е. нагнетательной скважине 12). В одном интересующем применении, т.е. бурении скважин ПГД, радиальный градиент по нагнетательной скважине 12 по существу в около 50 раз меньше, чем само электромагнитное поле, т.е. соотношение 7-метрового желаемого диапазона и диаметрального размера измерительного прибора электромагнитного градиента. Таким образом, измерение расстояния с 5%-ной точностью предпочтительно использует электромагнитные датчики вдоль переводника 16, которые имеют присущую им разрешающую способность 1/1000, стабильность и сигнал для подавления помех. Такая точность не только желательна для требований относительно возможной добычи нефти, но и позволяет буровику бурить не имеющую резкого искривления скважину, т.е. прямой ствол скважины, в отличие от спиралеобразной или s-образной скважины, а также необходима для легкого размещения стальной обсадной колонны в нагнетательной скважине 12.
Применение прямой подачи тока в целевую скважину 10 имеет ряд преимуществ по сравнению со способом индуцирования тока по уровню техники в целевую скважину посредством удаленного электрода или пары электродов, размещенных в скважине, в которой выполняют бурение. Когда ток подают прямо в целевую скважину 10, преобладающее течение тока вблизи электромагнитных датчиков недалеко от бурового долота 20 происходит от тока, протекающего по самой целевой скважине 10. Тем не менее, по уровню техники, когда ток подают в целевую скважину удаленно через пласт геологической среды при помощи электрода или электродов в скважине, которую необходимо пробурить, имеет место обратное, поскольку обычно лишь несколько процентов тока, подаваемого в геологическую среду, передаются в целевую скважину в непосредственной близости от датчиков. Преобладающее течение тока в этом случае происходит в непосредственной близости от датчиков в геологической среде и в скважине, окружающей ствол скважины, в котором выполняют бурение. Из-за аксиальной симметрии вокруг скважины, в которой выполняют бурение, электромагнитное поле, генерируемое токами этой геологической среды, в идеализированной конфигурации равно нулю. Однако, учитывая, что 1 часть в спецификации 1000 измерений, неидеальные характеристики пласта и расположение скважинной буровой компоновки в скважине могут быть неудовлетворительными.
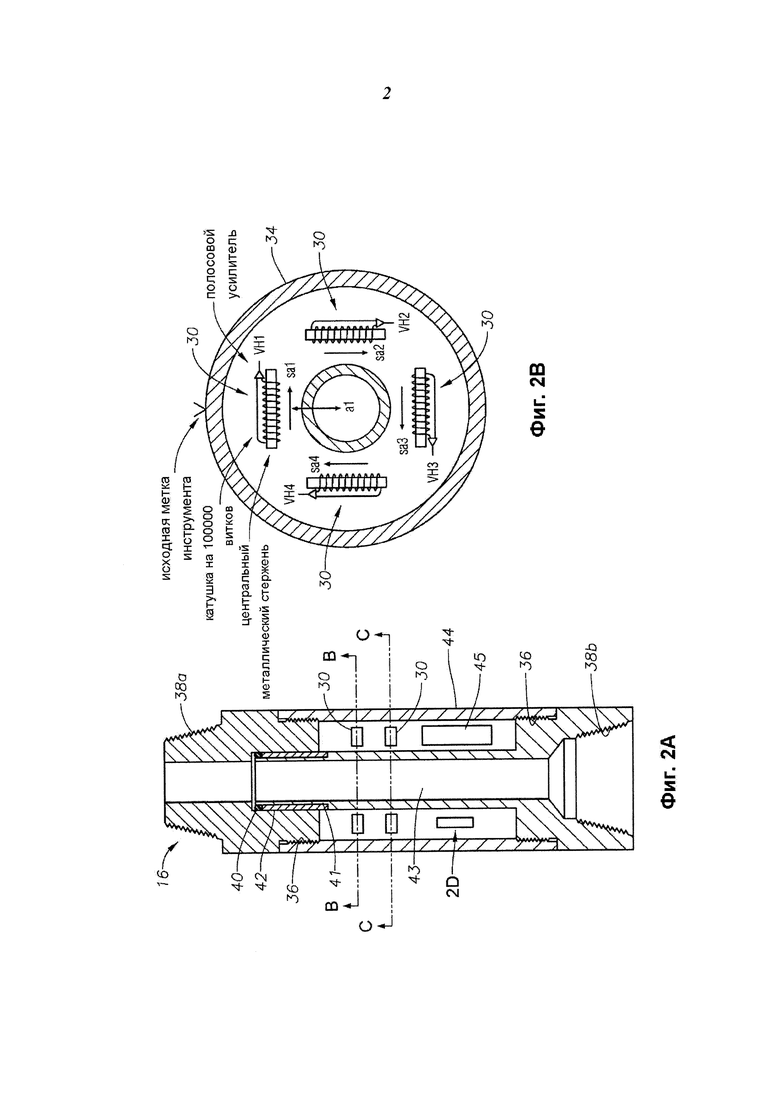
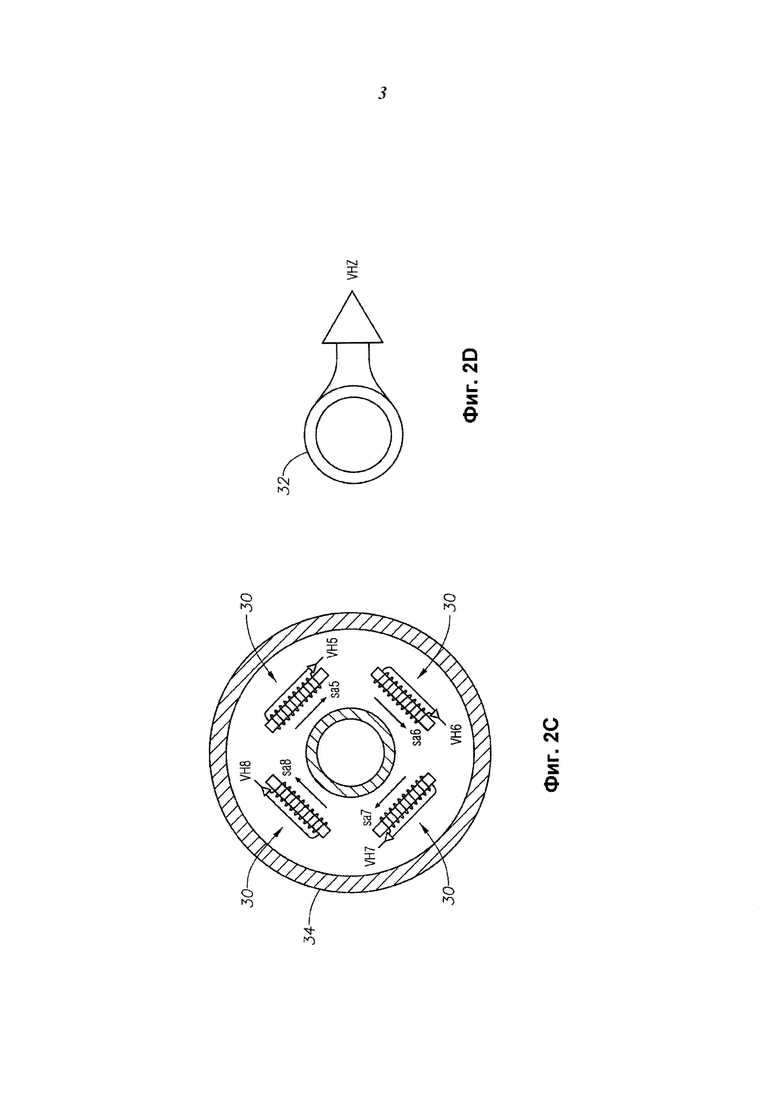
Фиг. 2А иллюстрирует схематичный вид переводника скважинного датчика 16 в соответствии с иллюстративным вариантом реализации данного изобретения. Фиг. 2В и 2С иллюстрируют вид в поперечном сечении переводника скважинного датчика 16 вдоль линий В и С соответственно. Фиг. 2D иллюстрирует вид в поперечном сечении датчика по оси z. Переводник скважинного датчика 16, который в данном документе также называется измерительным прибором электромагнитного поля или магнитным градиентометром, будучи описанным в данном документе, обладает желательными свойствами для выполнения качественного измерения радиального градиента электромагнитного поля. В определенных иллюстративных вариантах реализации изобретения такая система содержит по меньшей мере три электромагнитных датчика управляемого оборудования, отделенные друг от друга, с осями чувствительности, перпендикулярными продольной оси инструмента. Предпочтительно, чтобы система состояла из 8 первичных датчиков 30 компонентов электромагнитного поля, например, из 8 магнитных датчиков или 8 индукционных катушек, как проиллюстрировано на Фиг. 2В и С осями чувствительности, перпендикулярными оси бурения и на максимальном расстоянии в радиальном направлении от оси бурового инструмента, насколько позволит диаметр скважинной буровой компоновки. Эти датчики 30 расположены под 45 градусов относительно друг друга вокруг оси бурения. Такая конфигурация дает оптимизированный ответ на радиальный градиент электромагнитного поля. Кроме того, датчик 32 электромагнитного поля по оси "z" включен в рассмотрение с целью определения относительного направления бурения влево/вправо по отношению к направлению целевой скважины. Регистрация по оси "z" датчика 32 тоже полезна для компенсации влияний осевых составляющих электромагнитного поля, которые могут присутствовать. Датчик 32 оси z перпендикулярен датчикам 30 и параллелен первичной оси измеряющего переводника 16.
Как описано выше, двумя особенностями иллюстративных вариантов реализации данного изобретения являются способ и устройство генерации течения электрического тока в целевой скважине и магнитный градиентометр, размещенный в нагнетательной скважине. В отношении генерирования течения электрического тока в целевой скважине 10 предпочтительна низкая частота (например, около от 1 до 30 герц), при этом электрический ток от 5 до 30 ампер ср. квадр. обеспечивается источником тока 24, проиллюстрированным на Фиг. 1. Возвратный токовый провод (не проиллюстрирован) подключен к отдаленному возвратному электроду (не проиллюстрирован), а ходовой конец - к целевой скважине 10. В определенных вариантах реализации изобретения это может быть достигнуто с помощью прижима в самом устье скважины или заземляющего электрода как можно ближе к устью скважины.
Альтернативный вариант реализации изобретения, как проиллюстрировано на Фиг. 1, применяет изолированный провод 22 и электрод (на электрическом соединении 26), идущий настолько глубоко, насколько приемлемо, в скважину 10 для установления электрического контакта с обсадной колонной исходной или целевой скважины 10. В этом альтернативном варианте реализации изобретения, как указывали выше, дополнительная изолирующая секция 28 в обсадной колонне 11 может также быть включена, чтобы направлять больше тока в ближайшую к глубине измерения зону. В еще одном альтернативном варианте реализации изобретения ток подают в целевую скважину 10 с помощью заземлительного электрода 25 в непосредственной близости к позиции на поверхности целевой скважины 10. Например, на расстоянии 2 км в глубь ствола скважины можно ожидать 3% или более подаваемого тока. Испытания показали, что для скважин, отдаленных друг от друга на небольшом расстоянии, например, 7 метров, этого количества тока достаточно для функционирования устройства магнитного градиентометра по данному изобретению.
Хотя определенные варианты реализации данного изобретения не ограничены конкретным градиентометром электромагнитного поля, один предпочтительный вариант реализации градиентометра электромагнитного поля (т.е. переводник скважинного датчика 16) проиллюстрирован схематически на Фиг. 2A-2D, используя две платы 34, содержащие 8 датчиков 30. Может быть проиллюстрировано, что применение одной платы 34 с 4 симметрично расположенными датчиками 30 (как например, расположенная до входа плата, проиллюстрированная на Фиг. 2В, с 4 датчиками) с равным интервалом около центральной оси приведет к тому, что данные поля магнитного градиента будут иметь "белые пятна" через каждые 90°. Таким образом, в варианте реализации изобретения, проиллюстрированном на Фиг. 2A-2D, 9 датчиков 20, 32 индукционной катушки или феррозонда или их эквивалент расположены на переводнике скважинного датчика 16 с 8 датчиками электромагнитного поля 30 и одного датчика 32 по оси z. Эта иллюстративная конфигурация оптимизирует соотношение сигнал/шум, а также отсеивает нежелательные "мнимые" сигналы, например, те, которые связаны с незначительным течением электрического тока в центральный стержень инструмента.
Датчики индукционной катушки и микропроцессор в блоке ИПБ КНБК 14 генерируют выходные демодулированные напряжения постоянного тока V1…V8 (8 датчиков 30) и VZ (датчик 32), которые представляют собой амплитудные напряжения переменного тока VH1…VHZ, генерируемые электромагнитным полем и усилителями. Датчики 30, или по меньшей мере пары датчиков предпочтительно идентичны. В некоторых вариантах реализации изобретения каждая катушка предпочтительно имеет длину около 0,1 метра и около 100000 витков провода. Каждая катушка предпочтительно соединена с компоновкой схем (не проиллюстрирована), которая содержит низкошумовой, полосовой усилитель с высоким коэффициентом усиления. Напряжения усилителя запитаны индивидуально в скважинный микропроцессор для анализа. Первым этапом в данном анализе является применение синхронного детектирования для генерирования выходных напряжений постоянного тока V1…V8 и VZ для каждого из напряжений переменного тока, при этом эти напряжения пропорциональны амплитуде проекции электромагнитного поля на ось датчика с каждой стороны датчика. Датчики и их усилители вырабатывают напряжения переменного тока VH1…VH8 и VHz, проиллюстрированные на Фиг. 2A-2D, при этом выходные данные числа датчика "х" равны:

Hlocx представляет собой вектор электромагнитного поля, присутствующий в месте х, в котором расположен датчик х, sax представляет собой единичный вектор, указывающий в направлении чувствительности датчика х, а функция dot(y, z) представляет собой векторное скалярное произведение векторов у и z. Gainx представляет собой отношение выходного напряжения усилителя "х" и проекции электромагнитного поля в направлении sax, которое измеряют.
В определенных иллюстративных вариантах реализации изобретения датчики 30 расположены симметрично на плате 34 или платах 34. В проиллюстрированном варианте реализации изобретения VH1…VH4 прикреплены симметрично на первой плате 34 с расположениями под 90 градусов друг к другу и осями единичных векторов чувствительности sal…са4, каждая из которых находится на расстоянии "ах" от центра переводника бурения 16, как указано. Аналогичным образом, датчики VH5…VH8 крепят симметрично на второй плате 34 с расположениями под 90 градусов друг к другу. Эту вторую плату 34 крепят чуть ниже первой платы 34 таким образом, что, например, датчики 30 второй платы расположены под углом 45 градусов по отношению к датчикам 30 первой платы. Датчик VHz крепят под платами VH1…VH8. Также схематически проиллюстрированы стандартные датчики ИПБ и соответствующие электронные устройства для всей системы. Следует также отметить, что каждая пара датчиков 30 может находиться в одной плоскости, как проиллюстрировано, или в разных плоскостях.
Механическая конструкция этого переводника, как проиллюстрировано на Фиг. 2А, имеет резьбовые соединения 36 для монтажа и демонтажа и стержень 38а и резьбы блока 38b для присоединения к колонне бурильных труб. Соединение центральной оси в переводнике бурения 16 герметизируют уплотнительными кольцами 40, а также оно содержит электрически изолирующую втулку 42 для погашения потока электрического тока по центральной оси переводника 16. Малые электрические токи на наружной оболочке переводника 16, в первом приближении, не производят никакого электромагнитного поля внутри, где расположены датчики 30. Хотя иллюстративная конфигурация датчика и описываемый способ анализа не реагируют на протекание тока по центральному стержню 43, в общем даже незначительный ток на центральном стержне 43 переводника 16 может влиять на режим работы. Поэтому подавление такого течения тока изолирующей втулкой 42 и уплотнительным кольцом 40 является полезным. Следует иметь в виду, что изолирующая втулка 42 образует изоляционный зазор 41 между сердечником 43 и датчиками 30. Кроме того, важно разместить этот датчик в сборе в осесимметричном корпусе 44 с равномерной толщиной стенки. Небольшое течение электрического тока на внешней стенке такого корпуса не генерирует никакого поля внутри, где расположены датчики 30. Переводник также содержит модуль 45, который содержит, в данном примере, датчики (например, датчики управляемого оборудования ИПБ силы притяжения земли), линию передачи данных и интегрированные электронные устройства для всего инструмента.
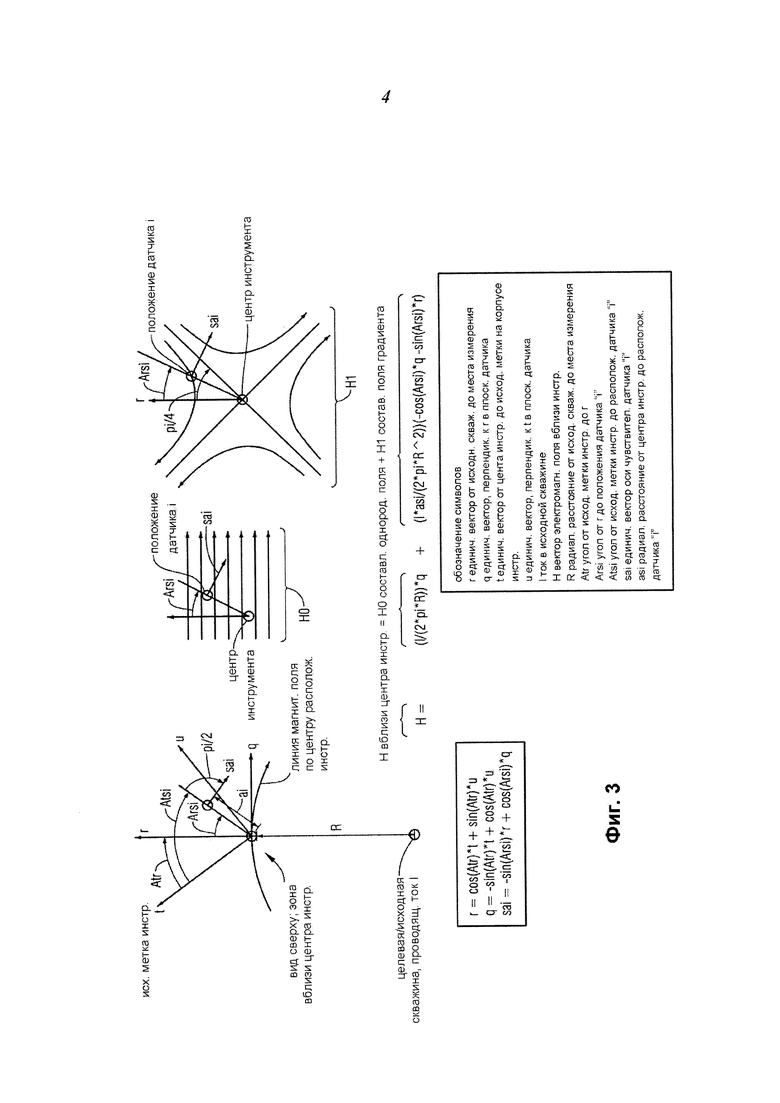
Фиг. 3 иллюстрирует соответствующие величины электромагнитного поля и определения символов, в соответствии с определенными иллюстративными вариантами реализации данного изобретения. Течение тока, вырабатываемое на целевую скважину 10, генерирует электромагнитное поле в непосредственной близости к электромагнитным датчикам 30. В хорошем приближении это электромагнитное поле циркулирует около целевой скважины 10 в соответствии с известным правилом правой руки. Кроме того, первичное Н0 однородное поле внутри инструмента выражено 1/(2*pi*R), где I представляет собой ток в амперах в целевой скважине напротив датчиков, pi=3,14156, a R представляет собой радиальное расстояние от центра целевой скважины 10 до центра пробуренной скважины 12 (например, нагнетательной скважины) на глубине измерения.
Генерируемое детализированное магнитное поле проиллюстрировано на Фиг. 3. В весьма непосредственной близости к оси измерительного инструмента (т.е. переводника скважинного датчика 16) "циклическое" электромагнитное поле приемлемо представлено разложением поля в "нормальном режиме" в виде суммы двух составляющих. Первая составляющая представляет собой составляющую однородного поля Н0, находящуюся в направлении единичного вектора q, т.е.

Вторая составляющая описывает "коррекцию" поля в связи с фактами о том, что силовые линии поля искривляются и что поле спадает как 1/R. На радиальном расстоянии "а" от центра измерительного инструмента под углом Ars, т.е. углом из радиального вектора блока от целевой скважины 10 до местоположения электромагнитного датчика, корректирующую составляющую поля Н1 определяют по формуле

Выходное напряжение V1 датчика в этом месте определяют по формуле

где dot(H,sa) представляет собой проекцию Н на ось чувствительности sa датчика. Gain представляет собой коэффициент электронного усиления усилителя в сочетании с ответом напряжения катушки и dot(H,sa).
Для представления базовых физических принципов иллюстративного способа реализации изобретения следует рассмотреть схематизированные представления датчиков, проиллюстрированных на Фиг. 2A-2D, и представления электромагнитного поля на Фиг. 3. Фактор "Gain", указанный в Уравнении 4, принимается равным 1 для этого обсуждения. С применением отношений для единичных векторов r, u, sa для идеализированных положений датчиков, как проиллюстрировано на Фиг. 2 и 3, и тригонометрических тождеств могут быть вычислены следующие отношения различных линейных комбинаций синхронно демодулированных напряжений V1…V8, VZ, чтобы в результате получить следующее:
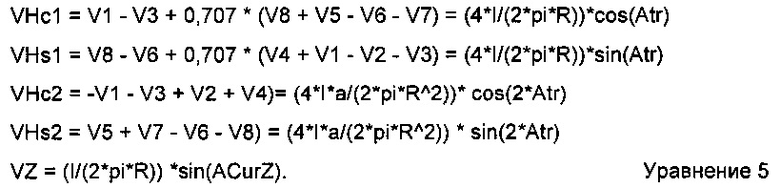

Угол ACurZ определен на Фиг. 4. В этом случае имеется ввиду угол между Hz и Н, как проиллюстрировано на Фиг. 4. Он также является составляющей угла между направлением "бурения" и исходной/целевой скважиной. Вышеприведенные соотношения дают порядок вычисления угла крена Atr между исходной меткой инструмента и r, угла между Hz и Н (угол ACurZ) и расстояния R между инструментом и целевой скважиной, как проиллюстрировано на Фиг. 2A-2D. Направление исходной метки инструмента и направление t, проиллюстрированное на Фиг. 3 в геологической среде, и расположение самого инструмента ИПБ без труда вычисляют с помощью стандартного анализа силы притяжения ИПБ и измерений датчиков магнитного поля геологической среды (которые могут быть получены с помощью модуля 45 на Фиг. 2А). С применением известных принципов векторного сложения эти определения ИПБ могут сочетаться с указанными выше определениями R и углов Atr и ACurZ для определения направления и расположения в пространстве определенной точки источника электромагнитного поля в целевой скважине.
Важно также отметить, что в хорошем приближении малая составляющая z электромагнитного поля или малая "азимутальная" составляющая равномерного поля, циркулирующая в центральном стержне, не оказывает влияния на 5 комбинаций напряжений VHc1, VHs1, VHs2, и VZ, определенных с помощью Уравнения 5.
Со ссылкой на другие важные аспекты описания изобретения, дефекты производства инструментов могут влиять на ответные напряжения V1…V8 VZ. Поскольку точные ответные напряжения V1…V8 VZ необходимы для анализа, определенного Уравнением 5 и Уравнением 6, дефекты инструмента должны быть компенсированы. Обычно этого достигают с помощью способов механической и электрической "калибровки" в инструменте. Однако в определенных иллюстративных вариантах реализации данного изобретения описан более эффективный способ вычисления. Вместо компенсации и калибровки каждого датчика индивидуально, как практикуют по уровню техники, будут описаны общая система и способ относительно измерений ряда напряжений датчика, измеренных в заданном размещении инструмента непосредственно по требуемым величинам, т.е. расстоянию до целевой скважины, направлению к целевой скважине и относительному направлению бурения "влево/вправо", а также осевому направлению целевой скважины. В одном варианте реализации изобретения это будет сделано при помощи матрицы с данными на инструмент ("TIMat"), которая характеризует общее поведение инструмента.
Чтобы проиллюстрировать это иллюстративным способом в соответствии с данным описанием изобретения, будут рассматривать применение способа для инструмента с 9 датчиками. Этот способ по описанию изобретения не ограничен конкретным количеством датчиков и легко адаптируется под инструменты, содержащие иные количества датчиков, такие как, например, 4 или 6 датчиков. Это также применимо, если нет датчика z в составе инструмента. Важным моментом является то, что данный способ базируется только на характеристиках общего поведения инструмента в отношении электромагнитных полей поблизости к нему. Особенности его конструкции, безусловно, влияют на уровень производительности, однако эти особенности конструкции не входят в способ, описываемый для определения интересующих параметров на основании значений ответа напряжения инструмента.
Есть несколько важных моментов, которые следует отметить вначале. Во-первых, датчик вырабатывает напряжение, пропорциональное проекции электромагнитного поля на местоположение датчика на оси чувствительности датчика. Это приводит к тому, что, когда инструмент вращается вокруг своей продольной оси z, в едином электромагнитном поле Н, перпендикулярном оси вращения, вырабатываемое напряжение пропорционально напряженности поля Η и cos(Atr-смещение). Этот угол смещения связан с ориентацией датчика относительно инструмента и его положением в инструменте. Таким образом, напряжение V датчика в таком однородном поле, перпендикулярном оси инструмента, может быть выражено следующим образом:

А, В и С являются коэффициентами пропорциональности, связанными с коэффициентом усиления датчика и расположением, а также ориентацией в инструменте. Важно отметить, что вращение инструмента в однородном поле, перпендикулярном к оси вращения, всегда может быть выражено в виде линейной комбинации терминов, пропорциональных cos(Atr) и sin(Atr).
Аналогичным образом, вращение датчика в градиентной составляющей поля, которая имеет характерную "гиперболическую" форму линий поля, проиллюстрированную на Фиг. 3, приводит к напряжению, пропорциональному линейной комбинации терминов, пропорциональных cos(2*Atr) и sin(2*Atr). Чтобы увидеть, как это происходит, можно взять для примера датчик V, проиллюстрированный на Фиг. 3 во вращении, т.е. угол Atsi варьирует в диапазоне 360 градусов. Когда Atsi равен углу смещения, составляющему около 40 градусов, который на Фиг. 3 указывает на проиллюстрированный датчик "i", Arsi=0. Когда Atr=40 градусов, ось чувствительности sai будет встречно-параллельна силовой линии поля Н1 и будет генерировать напряжение -Vi. Изменение Atsi на 45 градусов, т.е. установка Atr = смещение + 45 градусов, располагает sai перпендикулярно к силовой линии поля, и Vi=0. Когда At r =смещение + 90 градусов, выходной сигнал датчика будет составлять + Vi вольт, потому что и sai, и силовая линия поля сориентированы в одном направлении. Таким образом, когда вращение Atr проходит через 360 градусов, выходное напряжение будет проходить через 720 градусов. Соответственно, напряжение V, выработанное из этой составляющей поля, выраженной "G"=dH/dR, выражено в конечном итоге следующим образом:

В этом случае D и Е представляют собой коэффициенты пропорциональности, относящиеся к элементам конструкции инструмента. Аналогичным образом, если ось чувствительности датчика не перпендикулярна оси z инструмента и присутствует составляющая Hz примененного поля, датчик будет генерировать напряжение, которое не зависит от угла вращения Atr, то есть

На первом этапе данного способа, в соответствии с вышеизложенным, можно записать выходное напряжение датчика V1 в матричной форме в следующем виде:
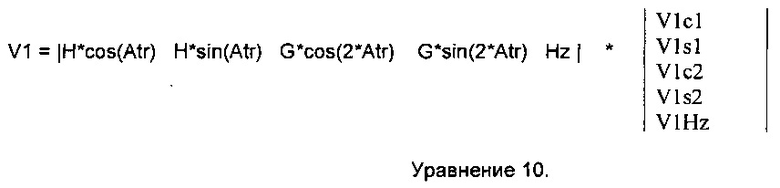
В этом отношении величины V1c1, V1s1, V1c2, V1s2, V1Hz представляют собой константы инструмента, т.е., в сущности, константы В, С, D, Е и F, рассмотренные выше, применяются к датчику 1. Вектор-строка HcsHz содержит физические величины, характеризующие величины электромагнитного поля (Н и G) и соответствующие углы вращения инструмента (Atr) и ACurZ, т.е. величины, которые в конечном счете определяются по ряду измерений напряжения датчика состояния инструмента, одно из которых представляет собой V1.
Приведенную выше линейную зависимость без труда расширяют с целью включения всех выходных напряжений V1…V8 VZ датчиков, добавляя столбцы следующим образом:
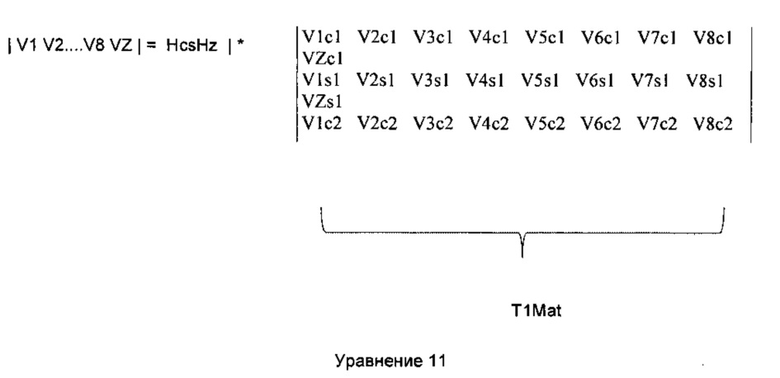
Важно отметить, что данная формулировка не требует конструкции инструмента для точного соответствия идеализированной конфигурации инструмента, как обсуждали в отношении Уравнения 5 и Уравнения 6. Требование заключается в том, чтобы матрица с данными на инструмент (T1Mat) описывала набор математически независимых уравнений.
Если матрица с данными на инструмент ("TIMat"), определенная выше, известна, интересующая вектор-строка, называемая "HcsHz", может быть восстановлена. Указанная выше матрица с данными на инструмент (TIMat) представляет собой таблицу чисел, описывающую ответы напряжения датчика электромагнитного поля на заданное однородное поле + градиентное поле + поле Hz. Числа в первой колонке TIMat выражают напряжение V1 в качестве алгебраически линейной суммы величин H*cos(Atr), H*sin(Atr), G*cos(2*Atr), G*sin(2*Atr) и Hz, как выражено в Уравнении 10. Вторая колонка чисел в TIMat представляет собой коэффициенты для напряжения датчика 2, т.е. V2, и так далее. 1×5 матрица-строка HcsHz прикладных физических величин может быть извлечена из набора измерений |V1 V2…V8 VZ| с применением варианта метода наименьших квадратов. Вектор-строку HcsHz можно вывести путем применения матрицы восстановления (RecMat) к вектору-строке из набора измерения напряжения датчиков, с помощью выражения:

где

Строку 5 по столбцовой матрице 9 RecMat ("матрица восстановления") можно сохранить в процессоре ИПБ, и 5 величин в HcsHz, вычисленные процессором ИПБ для передачи данных на поверхность геологической среды с применением коммуникационной системы данных по стволу скважины ИПБ. Эта форма иллюстративного уравнения, как и другие в этом описании изобретения, использует тип языка программирования MATLAB. Таким образом, “’” означает транспонирование матрицы, а функция inv(A) представляет собой обратную матрицу квадратной матрицы А. Технический вычислительный язык MATLAB и вычислительная среда, в которую он встроен, используют манипуляции матрицы для решения численной задачи, как это поймут специалисты в данной области техники, извлекающие пользу из ознакомления с данным описанием.
Из 1×5 матрицы строки HcsHz желаемые величины могут быть выведены следующим образом:

Эти результаты легко сочетаются с углом крена инструмента, наклоном и азимутальной ориентацией в пространственных определениях с применением стандартных измерений ИПБ и способов анализа с целью дать направление в пространстве и относительную продольную ориентацию целевой скважины от нагнетательной скважины. Вместо отправки HcsHz вверх по скважине через коммуникационную систему ИПБ, она может полезна для вычисления некоторых или всех результатов, показанных в Уравнении 15, в глубине скважины, и отправки результатов Уравнения 14 на поверхность земли.
Фиг. 4 иллюстрирует упрощенный вид компоновки низа бурильной колонны и петли горизонтальной калибровки 400 для калибровки магнитного градиентометрического инструмента (т.е. переводника скважинного датчика 16). Фиг. 5 иллюстрирует блок-схему способа калибровки 500 для инструмента градиента магнитного поля. Со ссылкой на Фиг. 4 и 5, матрица с данными на инструмент TIMat может быть выведена с помощью устройства калибровки (т.е. петли 400), проиллюстрированного на Фиг. 4. Таким образом, в блоке А (Фиг. 5) представлена проводящая петля калибровки. В определенных иллюстративных вариантах реализации петли калибровки 400 квадратная планарная петля из ответвлений проволоки около 30 метров в длину, с известными угловыми расположениями проводит ток одной и такой же частоты и величины, что ожидается в процессе бурения. В блоке В инструмент размещен смежно с петлей с центром чувствительности в известном положении в плоскости петли. Значения магнитного поля Н, радиального градиента G и z-составляющей Н, т.е. Hz этого поля относительно смежного направления тока, и продольной оси инструмента в этом месте, легко вычисляют, применяя закон Био Савара.
Данное устройство содержит механизм для управляемого вращения угла крена инструмента вокруг своей продольной оси, а также для вращения продольной оси о вокруг перпендикулярной оси, которая находится в плоскости петли и перпендикулярна Н0, при этом электромагнитное поле находится в центре инструмента. Это устройство и, в частности, электромагнитное поле, которое генерируется в близости от инструмента, который калибруют, тесно связаны с этими функциями, присутствующими в процессе бурения. В применении ПГД, в котором буровая скважина и целевая скважина находятся друг над другом, плоскость скважины является вертикальной, а не горизонтальной, как в устройстве калибровки. Матрицу с данными на инструмент TIMat определяют с помощью этого калибровочного устройства, отметив ответ инструмента на систему ориентаций инструмента, которые моделируют характеристики, ожидаемые при буровых работах. Матрица с данными на инструмент TIMat может быть вычислена на основании наборов измерений, которые представляют собой систему. В блоке С переменный ток вынужден течь в петле калибровки, а в блоке D регистрируют измерения, относящиеся к току. Набор измерений "i", то есть V1i, V2i,……V8i, VZi, происходит из известного набора параметров Н, G, Atri и ACurZi. Следуя общей формуле, результаты V1i, V2i……V8i, VZi для данного элемента системы выводят следующим образом (следует отметить, что Hzi=H0*sin(ACuri)):

Вся система калибровочных измерений может быть введена в матрицы, проиллюстрированные ниже, т.е.
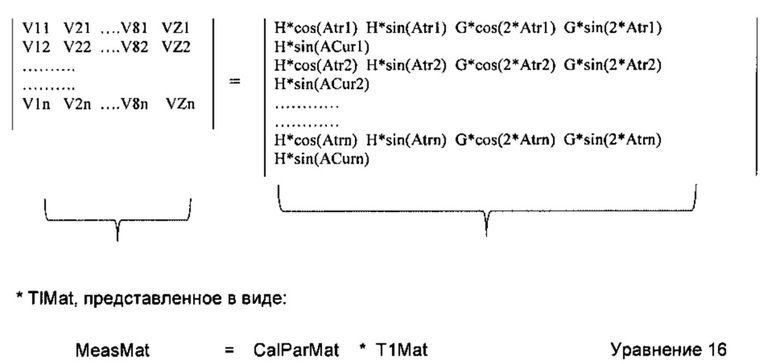
Матрицу с данными на инструмент TIMat можно вывести, применяя метод наименьших квадратов, в соответствии с Уравнением 16 в следующем виде:

Выбор приемлемой системы для параметров в CalParMat заключается в осуществлении 36 измерений величин V1……V8, VZ. Ток в петле калибровки 400 подают в фиксированном значении, чтобы электромагнитное поле на измерительных инструментах было сопоставимо или немногим больше, чем ожидалось во время буровых работ. Таким образом, значения H и G являются фиксированными. Во время первых 12 измерений, т.е. для i=1…12, ACurZ остается фиксированной, к примеру, под -5 градусов, а угол инструмента Atr продольно варьирует с шагом приращения 30 градусов, т.е. 0, 30, 60……330 градусов, как проиллюстрировано в блоке Е. Во время следующих 12 измерений, т.е. i=13…24, угол оси инструмента ACurZ в осевом направлении вращают и устанавливают на 0 градусов, a Atr снова варьируют посредством последовательностей 0, 30……330. Для последних 12 измерений, т.е. для i=25…………36, ACurZ устанавливают на+5 градусов, и Atr снова варьируют посредством последовательности градусов 0, 30……330. Таким образом, отмечая ответы инструмента V1…V8,VZ на каждую из указанных выше продольных и осевых ориентаций вращения инструмента, выводят необходимые числа, которые составляют матрицу калибровочного параметра (CalParMat) и матрицу измерения (MeasMat), указанные выше.
Применяя результаты вышеуказанных процедур, в блоке G, параметры градиента электромагнитного поля определяют оптимальным образом. Этот способ, с применением Уравнения 14, определяет матрицу восстановления (RecMat) от TIMat, которая дает простой и прямой способ определения необходимого параметра радиального расстояния R и угла крена Atr, т.е. угла между исходным направлением инструмента и вектором на целевую скважину. Угол крена Atr удобно сочетают со стандартным измерением ИПБ крена инструмента, наклона и азимутальных углов в пространстве с применением принципов векторного сложения, чтобы получить направление в пространстве на целевую скважину от нагнетательной скважины.
Фиг. 6 иллюстрирует блок-схему типовой компьютерной системы 100, выполненной с возможностью реализации системы калибровки посредством магнитного градиентометра, как описано в данном документе. В одном варианте реализации изобретения компьютерная система 100 содержит по меньшей мере один процессор 102, энергонезависимое машиночитаемое запоминающее устройство 104, дополнительный сетевой модуль связи 105, дополнительные устройства ввода/вывода 106, дополнительный дисплей 108, при это все они соединены между собой системной шиной 109. В той мере, в какой в систему входит сетевой модуль связи 105, сетевой модуль связи 105 выполнен с возможностью коммуникативно соединять компьютерную систему 100 с другими устройствами посредством сети. В одном варианте реализации изобретения сетевой модуль связи 105 представляет собой сетевую интерфейсную плату (NIC) и обменивается данными с помощью протокола Ethernet. В других вариантах реализации изобретения сетевой модуль связи 105 может представлять собой другой тип интерфейса связи, такой как волоконно-оптический интерфейс, и может обмениваться данными с помощью различных протоколов связи.
Стоит понимать, что компьютерная система 100 может быть подключена к одной или более общественных (например, Интернет) и/или частных сетей (не проиллюстрированы) через сетевой модуль связи 105. Такие сети могут включать, например, серверы, на которых хранятся фактические или смоделированные данные определения расстояний относительно скважин, отличные от данных, необходимых для калибровки, как описано в данном документе. Программные инструкции, выполняемые процессором 102 для реализации системы калибровки посредством магнитного градиентометра 110 в соответствии с вариантами реализации изобретения, описанными в данном документе, могут быть сохранены в запоминающем устройстве 104. Следует также понимать, что программные инструкции, относящиеся к системе калибровки посредством магнитного градиентометра 110, могут быть загружены в запоминающее устройство 104 с CD-ROM или другого соответствующего носителя.
В определенных иллюстративных вариантах реализации изобретения компьютерную систему 100 применяют для реализации по меньшей мере части способов, описанных в данном документе. Например, компьютерную систему 100 предпочтительно применяют для создания калибровочных матриц, выполнения операций по методу наименьших квадратов и определения матрицы с данными на инструмент, как описано выше.
Следует отметить еще раз, что данное изобретение может быть применено в различных применениях, в том числе применениях ПГД. Другие иллюстративные применения включают, например, применения для точного и надежного позиционирования в скважине, в которой выполняют бурение, "рельефной/пересекающейся" скважине (т.е. второй скважины), по отношению к соседней первой целевой скважине, обычно обходной скважине, так, что вторая скважина пересекает или уклоняется от целевой скважины по необходимости. Целевая скважина должна иметь более высокую проводимость, чем окружающий пласт, что может быть реализовано за счет применения удлиненного проводящего тела вдоль целевой скважины, таких как, например, обсадная колонна, которая уже присутствует в большинстве скважин для сохранения целостности скважины.
Способы и системы по данному изобретению также, в частности, желательны для работ бурения в рельефных скважинах и/или для уклонения скважин. В применении уклонения скважины скважину бурят с применением системы, описанной в данном документе, что связано с активным поиском других скважин (или других электропроводящих удлиненных структур) по траектории бурения. Если такие скважины или структуры обнаружены, система позиционирования изменяет траекторию бурения соответственно. Эти и другие применения и/или адаптации поймут специалисты в данной области техники, извлекающие пользу из ознакомления с данным описанием.
Таким образом, описана система для определения расстояния и направления до целевой скважины от второй скважины, в которой выполняют бурение. Варианты реализации системы могут обычно включать проводящее тело, размещенное по меньшей мере в части целевой скважины; бурильную колонну в скважине, подлежащей бурению, буровой колонны бурильных труб, имеющих несколько секций, соединение встык и проведение измерений в процессе бурения системы; электрический ток питания, предназначенный возбудить ток в целевой скважине путем прямой электрической связи с целевой скважиной; и электромагнитное поле чувствительного прибора во второй скважины, подлежащей бурению, электромагнитное поле чувствительного прибора чутко реагируя на электромагнитные поля и радиального градиентов электромагнитного поля, создаваемого электрическим током в целевой скважине.
Кроме того, описаны варианты реализации систем определения расстояния. Варианты реализации системы могут в основном включать первую скважину, содержащую устье скважины на поверхности пласта с удлиненным стволом, отходящим от устья скважины, при этом скважина имеет проксимальный конец, смежный с устьем скважины, и дистальный конец, при этом скважина содержит удлиненное проводящее тело, размещенное в ней; источник переменного тока на поверхности, при этом источник включает эмиттер и возвратные электроды; вторую скважину, имеющую удлиненный ствол скважины, отходящий от поверхности; колонну, размещенную во второй скважине; и магнитный измерительный прибор, помещенный в колонну труб.
Другие варианты локационной системы, как правило, могут включать первую скважину, имеющую устье на поверхности пласта с удлиненным стволом скважины, отходящим от устья скважины, при этом скважина имеет проксимальный конец, смежный с устьем скважины, и дистальный конец, при этом скважина содержит удлиненное проводящее тело, размещенное в ней; вторая скважина содержит удлиненный ствол, отходящий от поверхности; колонну труб, размещенных во второй скважине; источник переменного тока, при этом источник включает эмиттер и возвратный электрод, при этом эмиттер и возвратные электроды расположены во второй скважине вдоль колонны труб; и магнитный градиентометр, размещенный на колонне труб, при этом источник тока вырабатывает электрический ток, который передается из эмиттера, и при этом магнитный градиентометр выполнен с возможностью отвечать на градиент магнитного поля индуцированного тока, протекающего в проводящем теле в первой скважине.
Кроме того, описаны варианты реализации изобретения для расположения целевой скважины, содержащей проводящее тело из второй скважины. Скважинный инструмент может, как правило, содержать электрический источник тока, содержащий эмиттер и возвратный электрод; и магнитный градиентометр, при этом источник тока вырабатывает электрический ток, который передается из эмиттера, и при этом магнитный градиентометр реагирует на градиент магнитного поля, индуцированного током, протекающим вдоль проводящего тела в целевой скважине. Более того, любой из следующих элементов, в одиночку или в сочетании друг с другом, может быть объединен с любым из вышеуказанных вариантов реализации изобретения:
Источник электрического тока содержит изменяющийся по времени ток.
Измерительный прибор электромагнитного поля содержит множество электромагнитных датчиков, при этом каждый электромагнитный датчика расположен внутри второй скважины на месте и реагирует на электромагнитное поле в месте его нахождения.
Проводящее тело представляет собой обсадную колонну, размещенную в целевой скважине.
Электромагнитные датчики расположены во второй скважине так, что электромагнитное поле измерительного прибора реагирует на градиенты в радиальном направлении изменяющегося по времени магнитного поля.
Прямое электрическое соединение включает провод, отходящий от второй скважины к целевой скважине.
Прямое электрическое соединение включает электрод на поверхности земли.
Изменяющийся по времени ток включает низкочастотный переменный ток.
Измерительный прибор электромагнитного поля содержит первую плату и вторую плату на расстоянии друг от друга вдоль основной оси измерительного прибора, при этом каждая плата содержит множество датчиков на расстоянии друг от друга симметрично относительно центральной оси платы.
Каждая плата измерительного прибора электромагнитного поля содержит четыре датчика, расположенные под углом 90° друг к другу вокруг оси платы.
Измерительный прибор электромагнитного поля содержит первую плату и вторую плату на расстоянии друг от друга вдоль основной оси измерительного прибора и дополнительного датчика на расстоянии от плат.
Дополнительный датчик перпендикулярен датчикам плат измерительного прибора и параллелен первичной оси измерительного прибора.
Вторая плата измерительного прибора вращается так, что датчики второй платы находятся под углом 45° относительно датчиков первой платы.
Измерительный прибор электромагнитного поля находится в переводнике скважинного датчика, при этом переводник скважинного датчика имеет внешний корпус из равномерной толщиной стенки.
Измерительный прибор электромагнитного поля находится в переводнике скважинного датчика и при этом переводник скважинного датчика имеет центральный стержень, который имеет электроизоляционный зазор.
Таким образом, описана система для определения расстояния и направления до целевой скважины от второй скважины, в которой выполняют бурение. Целевой ствол, отходящий от поверхности пласта и содержащий проводящее тело, расположенное в нем. Варианты реализации способа могут включать в основном получение течения переменного тока к целевой скважине путем прямого электрического соединения проводящего тела с источником питания переменного тока; и выполнение множественных измерений данных магнитного поля на выбранных интервалах глубины с применением измерительного прибора градиента электромагнитного поля, размещенного во второй скважине. Кроме того, описаны варианты реализации способа выполнения парогравитационного дренажа с целью добычи углеводородов из пласта. Варианты реализации этого способа, как правило, могут включать получение переменного тока в первой целевой скважине путем прямого подключения токопроводящего тела в целевой скважине к источнику питания переменного тока; выполнение множественных измерений данных магнитного поля на выбранных интервалах глубины с применением измерительного прибора градиента электромагнитного поля, размещенного в целевой скважине; подачу пар во вторую скважину для обеспечения перемещения углеводородов в пласте в первую скважину; и добычу углеводородов из первой скважины. Более того, один из следующих элементов, в одиночку или в сочетании друг с другом, может быть объединен с любым из вышеуказанных вариантов реализации изобретения:
Ответ измерительного прибора применяют для определения расстояния от скважины, в которой выполняют бурение.
Измерительный прибор электромагнитного поля определяет относительное азимутальное направление целевой скважины к скважине, в которой выполняют бурение.
Измерительный прибор определяет относительный угол между направлением скважины, в которой выполняют бурение, и целевой скважиной.
Ответ измерительного прибора применяют для определения расстояния от скважины, в которой выполняют бурение, и при этом расстояние определяют с помощью матрицы чисел, которые характеризуют ответ измерительного прибора электромагнитного поля на электромагнитное поле и его радиальный градиент вблизи измерительного прибора.
Измерения включают величину, направление и радиальный градиент магнитного поля, создаваемый течением тока в целевой скважине.
Измерение в скважине, в которой выполняют бурение, величины и направления поля геологической среды и направления силы притяжения.
Переменный ток имеет низкую частоту.
Частота переменного тока составляет около 1-30 герц.
Инициирование бурения второй скважины и прерывание бурения при проведении измерений.
Позиционирование электрода в целевой скважине.
Подсоединение электрода к целевой скважине на поверхности.
Подсоединение электрода к проводящему телу в глубь скважины от поверхности.
Размещение изолирующей секции в проводящем теле вверх от местоположения направляющего электрического соединения проводящего тела.
Обнаружение в стволе скважины, в которой выполняют бурение, радиального градиента магнитного поля.
Ток составляет около 5-30 ампер ср. квадр.
Вычисление угла между углом крена прибора и целевой скважиной и вычисление расстояния между скважиной, в которой выполняют бурение, и целевой скважиной.
Бурение второй скважины; измерение градиента электромагнитного поля; и продолжение бурения второй скважины на основании измеренного градиента электромагнитного поля.
Таким образом, описан способ калибровки прибора электромагнитного поля градиента. Прибор электромагнитного поля градиента характеризуется удлиненной продольной осью. Примеры реализации способа, в целом, могут включать обеспечение петли электропроводящей калибровки с выбором формы, расположенной в плоскости; позиционирование прибора электромагнитного поля градиента вблизи калибровочной петли так, что продольная ось имеет первую ориентацию относительно калибровочной петли и расположена в плоскости петли калибровки; индуцирование переменного тока в петле калибровки; применение прибора электромагнитного поля градиента для измерения электромагнитного поля, создаваемого током в калибровочной петле, пока прибор находится в первой ориентации; в продольном направлении вращающегося прибора электромагнитного поля градиента относительно точки, на удлиненный продольной оси в плоскости петли до второй ориентации; применение прибора электромагнитного поля градиента для измерения электромагнитного поля, создаваемого током в калибровочной петле, пока прибор находится во второй ориентации; и повторение продольного вращения и измерения для множества ориентаций для генерирования данных измерений. Более того, один из следующих элементов, в одиночку или в сочетании друг с другом, может быть объединен с любым из вышеуказанных вариантов реализации изобретения:
Калибровочная петля является квадратной, плоской петлей.
Квадратная планарная петля состоит из ответвлений около 30 метров в длину.
Оценка частоты и величины ожидаемого при бурении скважины; применение расчетной частоты и тока на этап индукции.
Удерживание переменного тока на фиксированной величине.
Прибор в продольном направлении повернут на около 30° в течение каждого добавочного измерения.
Прибор последовательно вращают в продольном направлении на 360°.
Следующее повторение продольного вращения и измерения, при этом способ дополнительно включает аксиальное вращение прибора вокруг удлиненной продольной оси и повторение этапов продольного вращения и измерения.
Применение данных измерений для генерации матрицы напряжения; генерирование матрицы калибровочного параметра с применением данных ориентации и вектора магнитного поля; применение метода наименьших квадратов для полученной матрицы с целью определения матрицы с данными на инструмент.
Регулировка одного или более параметров прибора градиента электромагнитного поля на основании матрицы с данными на инструмент.
Более того, способы, описанные в данном документе, могут быть реализованы в системе, содержащей компоновку схем для реализации любого из способов, или в компьютерно-программном продукте, включающем инструкции, которые, когда выполняются по меньшей мере одним процессором, заставляют процессор выполнять любой из способов, описанных в данном документе.
Хотя различные варианты и способы были проиллюстрированы и описаны, раскрытие не ограничивается только такими вариантами и методами и будет включать все модификации и вариации, что будет очевидно для специалиста в данной области техники. Поэтому следует понимать, что раскрытие не предназначено, чтобы быть ограниченным описанными конкретными формами. Скорее, есть намерение охватить все модификации, эквиваленты и альтернативы, подпадающие под сущность и объем изобретения, как определено прилагаемой формулой изобретения.
Изобретение относится к направленному бурению скважин. Техническим результатом является повышение точности определения расстояния и направления до целевой скважины за счет усиления электромагнитного поля в целевой области исследования. В частности предложена система для определения расстояния и направления до целевой скважины от второй скважины, в которой выполняют бурение, содержащая: обсадную колонну, размещенную по меньшей мере в части целевой скважины; буровую колонну в скважине, в которой выполняют бурение, при этом буровая колона выполняет измерения в процессе бурения; источник электрического тока, предназначенный для возбуждения подачи тока к целевой скважине путем прямого электрического соединения с целевой скважиной; и измерительный прибор электромагнитного поля во второй скважине. Причем система содержит изолированный провод и электрод, размещенные настолько глубоко, насколько приемлемо, в скважине для установления электрического контакта с обсадной колонной целевой скважины, и дополнительную изолирующую секцию в обсадной колонне для обеспечения направления больше тока в ближайшую зону измерения. При этом измерительный прибор электромагнитного поля реагирует на электромагнитное поле и на радиальные градиенты электромагнитного поля, создаваемые электрическим током в целевой скважине. 4 н. и 27 з.п. ф-лы, 9 ил.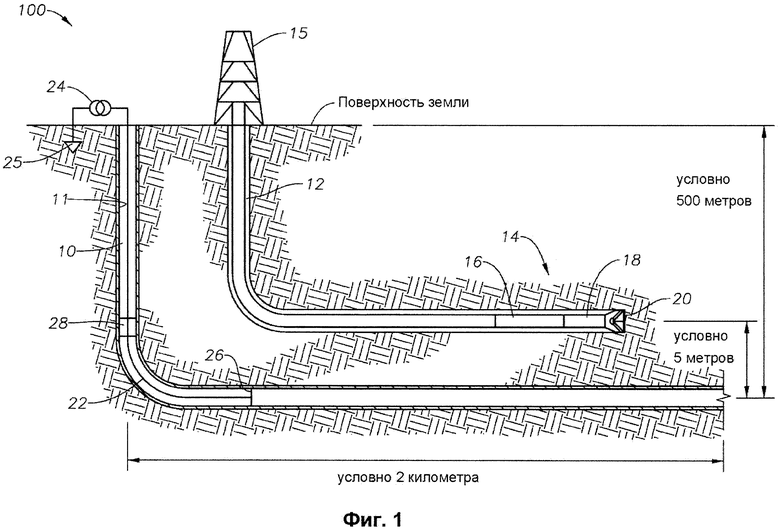
1. Система для определения расстояния и направления до целевой скважины от второй скважины, в которой выполняют бурение, содержащая:
обсадную колонну, размещенную по меньшей мере в части целевой скважины;
буровую колонну в скважине, в которой выполняют бурение, при этом буровая колона выполняет измерения в процессе бурения;
источник электрического тока, предназначенный для возбуждения подачи тока к целевой скважине путем прямого электрического соединения с целевой скважиной, причем система содержит изолированный провод и электрод, размещенные настолько глубоко, насколько приемлемо, в скважине для установления электрического контакта с обсадной колонной целевой скважины и дополнительную изолирующую секцию в обсадной колонне для обеспечения направления больше тока в ближайшую зону измерения; и
измерительный прибор электромагнитного поля во второй скважине, в которой выполняют бурение, при этом измерительный прибор электромагнитного поля реагирует на электромагнитное поле и на радиальные градиенты электромагнитного поля, создаваемые электрическим током в целевой скважине.
2. Система по п. 1, отличающаяся тем, что источник электрического тока содержит изменяющийся по времени ток.
3. Система по п. 2, отличающаяся тем, что измерительный прибор электромагнитного поля содержит множество электромагнитных датчиков, при этом каждый электромагнитный датчик расположен в том или ином месте внутри второй скважины и реагирует на электромагнитное поле в месте его расположения.
4. Система по п. 3, отличающаяся тем, что электромагнитные датчики расположены во второй скважине так, что измерительный прибор электромагнитного поля реагирует на градиенты в радиальном направлении изменяющегося по времени магнитного поля.
5. Система по п. 2, отличающаяся тем, что изменяющийся по времени ток включает низкочастотный переменный ток.
6. Система по п. 1, отличающаяся тем, что измерительный прибор электромагнитного поля содержит первую плату и вторую плату, расположенные на некотором расстоянии друг от друга вдоль первичной оси измерительного прибора, при этом каждая плата содержит множество датчиков на некотором расстоянии друг от друга симметрично вокруг центральной оси платы.
7. Система по п. 6, отличающаяся тем, что каждая плата содержит четыре датчика, расположенные под 90° друг к другу вокруг оси платы.
8. Система по п. 7, дополнительно содержащая дополнительный датчик, расположенный на некотором расстоянии от плат.
9. Система по п. 8, отличающаяся тем, что дополнительный датчик перпендикулярен датчикам плат и параллелен первичной оси измерительного прибора.
10. Система по п. 7, отличающаяся тем, что вторая плата вращается таким образом, что датчики второй платы находятся под углом 45° относительно датчиков первой платы.
11. Система по п. 1, отличающаяся тем, что измерительный прибор электромагнитного поля размещен в переводнике скважинного датчика, при этом переводник скважинного датчика имеет внешний корпус с равномерной толщиной стенки, и при этом переводник скважинного датчика содержит центральный стержень, который имеет электроизоляционный зазор.
12. Способ определения расстояния и направления до первой целевой скважины от второй скважины, в которой выполняют бурение, при этом целевая скважина простирается от поверхности пласта и содержит обсадную колонну, размещенную в ней, при этом способ включает:
получение переменного тока на целевой скважине путем прямого электрического соединения обсадной колонны с источником питания переменного тока, причем применяют изолированный провод и электрод, размещенные настолько глубоко, насколько приемлемо, в скважине для установления электрического контакта с обсадной колонной целевой скважины и используют дополнительную изолирующую секцию в обсадной колонне, для обеспечения направления больше тока в ближайшую зону измерения; и
выполнение множественных измерений данных магнитного поля на выбранных интервалах глубины с применением измерительного прибора электромагнитного градиента, размещенного во второй скважине.
13. Способ по п. 12, отличающийся тем, что измерения включают величину, направление и радиальный градиент магнитного поля, создаваемого течением тока в целевой скважине.
14. Способ по п. 12, дополнительно включающий измерение в стволе скважины, в которой выполняют бурение, величины и направления поля геологической среды и направления силы притяжения.
15. Способ по п. 12, отличающийся тем, что переменный ток имеет низкую частоту.
16. Способ по п. 15, отличающийся тем, что частота составляет около 1-30 герц.
17. Способ по п. 12, дополнительно включающий инициирование бурения второй скважины и прерывание бурения при проведении измерений.
18. Способ по п. 12, отличающийся тем, что снятие измерений включает обнаружение в стволе скважине, в которой выполняют бурение, радиального градиента магнитного поля.
19. Способ по п. 12, отличающийся тем, что ток составляет около 5-30 ампер ср. квадр.
20. Способ по п. 12, дополнительно включающий этап вычисления угла между углом крена прибора и целевой скважиной и вычисление расстояния между скважиной, в которой выполняют бурение, и целевой скважиной.
21. Способ по п. 12, дополнительно включающий проведение работ ПГД с применением множественных измерений данных магнитного поля.
22. Система для определения расстояния и направления до целевой скважины, содержащая:
источник тока, расположенный в местоположении на поверхности;
проводящее тело, размещенное по меньшей мере в части целевой скважины, в местоположении на глубине скважины, причем данное проводящее тело содержит изолирующую секцию, расположенную между указанным местоположением на поверхности и дистальным концом целевой скважины;
электрический проводник, который электрически связан с источником тока, расположенным в местоположении на поверхности, и электрически связан с проводящим телом в местоположении между изолирующей секцией проводящего тела и дистальным концом скважины;
и измерительный прибор электромагнитного поля, размещенный на удалении от целевой скважины и выполненный с возможностью реагирования на электромагнитное поле и на радиальные градиенты электромагнитного поля, создаваемые электрическим током в целевой скважине.
23. Система по п. 22, дополнительно содержащая скважинный электрод, связанный с проводящим телом в точке подачи тока, расположенной между изолирующей секцией проводящего тела и дистальным концом целевой скважины, причем данный скважинный электрод установлен с возможностью подачи электрического тока в целевую скважину.
24. Система по п. 23, в которой проводящее тело представляет собой обсадную колонну, а указанный скважинный электрод имеет электрический контакт с этой обсадной колонной в указанной точке подачи тока.
25. Система по п. 22, в которой электрический проводник представляет собой изолированный провод, проходящий через изолирующую секцию проводящего тела.
26. Система по п. 22, в которой измерительный прибор электромагнитного поля установлен в скважине, пробуриваемой на удалении от целевой скважины.
27. Система по п. 22, дополнительно содержащая заземлительный электрод, который электрически связан с источником тока и размещен в указанном местоположении на поверхности.
28. Способ определения расстояния и направления до целевой скважины, содержащий:
получение электрического тока от источника тока, расположенного в местоположении на поверхности;
передача электрического тока в целевую скважину по электрическому проводнику, электрически связанному с источником тока, расположенным в местоположении на поверхности;
подача электрического тока через направленное электрическое соединение, предусмотренное между электрическим проводником и проводящим телом, размещенным по меньшей мере в части целевой скважины, причем данное проводящее тело содержит изолирующую секцию, расположенную вверх по скважине от местоположения указанного направленного электрического соединения;
и выполнение измерений данных магнитного поля, создаваемого электрическим током в целевой скважине.
29. Способ по п. 28, дополнительно содержащий присоединение к проводящему телу скважинного электрода в местоположении вглубь скважины от изолирующей секции проводящего тела.
30. Способ по п. 29, дополнительно содержащий размещение в целевой скважине обсадной колонны, содержащей изолирующую секцию колонны, причем этап присоединения скважинного электрода включает в себя присоединение скважинного электрода к обсадной колонне в местоположении в глубь скважины от изолирующей секции колонны.
31. Способ по п. 28, дополнительно содержащий бурение скважины на удалении от целевой скважины и измерение электромагнитного поля, создаваемого электрическим током в целевой скважине, посредством измерительного прибора электромагнитного поля, установленного в указанной скважине, расположенной на удалении от целевой скважины.
| US 20100155139 A1, 24.06.2010 | |||
| WO 2007145859 А2, 21.12.2007 | |||
| US 20040128073 A1, 01.07.2004 | |||
| СПОСОБ И СИСТЕМА СОЗДАНИЯ СТВОЛА СКВАЖИНЫ В ПОЧВЕННОЙ ФОРМАЦИИ | 1995 |
|
RU2131975C1 |
| ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ МАГНИТНЫМИ СРЕДСТВАМИ ПРИ БУРЕНИИ ПАРАЛЛЕЛЬНЫХ СКВАЖИН | 2007 |
|
RU2436924C2 |
| US 20050247484 A1, 10.11.2005 | |||
| US 20060113112 A1, 01.06.2006. | |||

