Область техники, к которой относится изобретение
В общем настоящее изобретение относится к способам и системам для исследования подземных пластов. Более конкретно, настоящее изобретение относится к способам и системам для обнаружения и определения местоположений микросейсмических событий путем непрерывной картографической миграции.
Уровень техники
Для повышения добычи углеводородов из нефтяных и газовых скважин можно осуществлять гидравлический разрыв подземных пластов, окружающих такие скважины. Гидравлический разрыв используют для создания небольших трещин в подземных пластах, чтобы обеспечивать возможность движения нефти или газа в направлении скважины. Гидравлический разрыв пластов осуществляют путем введения в пласты через стволы скважин специальных технических флюидов при высоком давлении и высоких скоростях потока. Гидравлические трещины обычно продолжаются на расстояние от 250 до 750 футов от ствола скважины в двух противоположных направлениях в соответствии с естественными напряжениями внутри пласта.
Предпочтительно, чтобы флюиды для гидравлического разрыва вводились вместе с расклинивающими агентами, которыми обычно являются частицы твердого материала, такого как песок. Расклинивающий агент накапливается внутри трещины, чтобы постоянно расклинивать новые трещины или поры в пласте. Расклинивающий агент формирует плоскость высокопроницаемого песка, через который добываемые флюиды могут втекать в ствол скважины. Предпочтительно, чтобы флюиды для гидравлического разрыва имели высокую вязкость и, следовательно, могли переносить эффективные объемы расклинивающего материала.
В последнее время делаются попытки контролировать гидравлический разрыв пласта и создавать карты, на которых отображаются места, где происходят разрывы, и протяженность трещин. Современный контроль гидравлического разрыва пласта включает в себя способы воспроизведения местоположений сейсмических событий картированием времен вступлений сейсмических волн и информации о поляризации в трехмерном пространстве путем использования полученных моделированием времен пробега и/или траекторий лучей. Для заданной скоростной модели путем моделирования могут быть образованы просмотровые таблицы времен пробега. Типичный способ картирования общеизвестен как нелинейный способ определения местоположений событий. Нелинейное определение местоположения события использовалось исторически для определения местоположений макросейсмических событий, таких как землетрясение, и описано, например, на сайте http://geoazur.unice.fr/PERSO/lomax/nlloc/. Эти и другие эквивалентные способы именуются в настоящей заявке нелинейными способами определения местоположения событий.
Нелинейные способы определения местоположений событий включают в себя отбор и временной пикинг дискретных сейсмических вступлений для каждого из нескольких сейсмических детекторов и картирование для определения местоположения источника сейсмической энергии. Однако чтобы успешно и точно определять местоположение сейсмического события, необходимо, чтобы дискретные пропикированные значения времени для каждого сейсмического детектора соответствовали одному и тому же вступлению Р- или S-волны, и должно быть измерено вступление, происходящее от одного и того же микросейсмического или сейсмического события. Во время операции гидравлического разрыва в течение короткого периода времени могут возникать многие сотни микросейсмических событий. Для современных способов, используемых в промышленности, требуется значительное вмешательство человека в контроль качества результатов пикинга значений времени. Для подготовки точных карт местоположений событий часто могут требоваться недели рабочего времени для регистрации и обнаружения микросейсмических событий. Даже в таком случае результат, для получения которого необходимо взаимодействие с человеком и интерпретация человеком, может приводить к многочисленным и невоспроизводимым решениям.
Поэтому современные способы контроля в реальном времени и моделирования роста трещин обычно основаны на данных о закачивании и давлении, которые дают очень ограниченную информацию, касающуюся геометрии роста трещин. Существует необходимость в обнаружении и определении местоположений микросейсмических событий, которые могут быть реализованы в реальном времени и могут обеспечивать оператору возможность регулирования параметров гидравлического разрыва во время работ по гидравлическому разрыву.
Сущность изобретения
Предложенная группа изобретений позволяет обеспечить такой технический результат, как возможность непрерывно обновлять карту микросейсмических событий в режиме реального времени с исключением аппаратной погрешности, обусловленной использования двух типов данных, зарегистрированных одними и теми же детекторами. Согласно настоящему изобретению предложены способы и системы для микросейсмического контроля в реальном времени гидравлического разрыва пласта. При этом способы настоящего изобретения могут включать в себя непрерывную картографическую миграцию регистрируемых микросейсмических сигналов. Способами и системами обеспечивается робастное автоматизированное одновременное обнаружение и определение местоположений микросейсмических событий.
Способы и системы настоящего изобретения могут быть применены при любой работе, связанной с микросейсмической активностью, относящейся к подземным пластам, включая работы по гидравлическому разрыву пласта, но без ограничения ими. Применение принципов настоящего изобретения позволяет получать способ контроля микросейсмичности. Контроль содержит прием сейсмических сигналов сейсмическими детекторами и образование эволюционирующей во времени исторической карты микросейсмической активности путем картирования, основанного на сейсмических сигналах.
Согласно некоторым аспектам способа прием дополнительно содержит измерение первого из одного или нескольких сейсмических сигналов с помощью одного датчика (детектора) с единственного места расположения датчика, а формирование дополнительно содержит интерпретацию первого сейсмического сигнала раздельно в виде характеристик Р-волны и S-волны и картирование слияния первого сейсмического сигнала, интерпретируемого в виде характеристики Р-волны и S-волны. Кроме того, прием может содержать измерение первого из одного или нескольких сейсмических сигналов с помощью двух или более датчиков (детекторов) с единственного места расположения датчика. Кроме того, формирование может дополнительно содержать проведение различия между Р-волновой и S-волновой компонентами первого сейсмического сигнала и картирование слияния Р-волновой и S-волновой компонент первого сейсмического сигнала.
Согласно другим аспектам прием дополнительно содержит измерение первого из одного или нескольких сейсмических сигналов с помощью по меньшей мере двух детекторов в различных местоположениях, а формирование дополнительно содержит картирование пространственного слияния первого сейсмического сигнала. Прием может дополнительно содержать измерение первого из одного или нескольких сейсмических сигналов с помощью по меньшей мере трех детекторов в различных местах расположения, а формирование может дополнительно содержать двумерное картирование пространственного слияния первого сейсмического сигнала.
Согласно другим аспектам изобретения прием дополнительно содержит измерение первого из одного или нескольких сейсмических сигналов с помощью по меньшей мере четырех детекторов в различных местоположениях, а формирование дополнительно содержит трехмерное картирование пространственного слияния первого сейсмического сигнала. Прием может дополнительно включать в себя измерение первого из одного или нескольких сейсмических сигналов с помощью по меньшей мере двух детекторов в различных местах расположения. Формирование может дополнительно содержать интерпретацию первого сейсмического сигнала раздельно в виде характеристик Р-волны и S-волны, картирование слияния первого сейсмического сигнала, интерпретируемого в виде характеристик Р-волны и S-волны, и картирование пространственного слияния первого сейсмического сигнала на основании первого сейсмического сигнала, принимаемого по меньшей мере двумя детекторами в различных местоположениях.
Способ может дополнительно содержать интерпретацию эволюционирующей исторической карты и идентификацию микросейсмических событий. Интерпретация может включать в себя интерпретацию эволюции исторической карты во множестве моментов времени в виде характеристики сейсмической энергии, представляющей интерес, в каждый из множества моментов времени в точках в пространстве. Способ может включать в себя оповещение в реальном времени оператора гидравлического разрыва пласта о микросейсмических событиях. Кроме того, способ может включать в себя идентификацию точек, представляющих интерес, в дискретные моменты времени по эволюции исторической карты на основании точек на карте, указывающих на источники значительной сейсмической энергии. Прием сейсмических сигналов и образование эволюционирующей во времени исторической карты могут быть автоматизированы. До образования эволюционирующей исторической карты могут быть использованы хеш-таблицы для сохранения заранее вычисленных значений. Картирование может представлять собой двумерное картирование как функцию расстояния от группы сейсмических датчиков и их положения.
Согласно еще одному объекту изобретения предложен способ контроля микросейсмических событий. Способ включает в себя выполнение операции гидравлического разрыва пласта в стволе скважины, картирование для образования исторической карты источника сейсмической энергии во время операции гидравлического разрыва пласта и обнаружение и определение местоположений микросейсмических событий по исторической карте. В реальном времени может быть осуществлено оповещение оператора об обнаруженных микросейсмических событиях и определенных местоположениях событий. Способ может дополнительно включать в себя непрерывную регистрацию микросейсмических данных, формируемых в течение операции гидравлического разрыва пласта. Способ может содержать осуществление непрерывного преобразования обнаружений вступлений по микросейсмическим данным. Непрерывное преобразование обнаружений вступлений может содержать непрерывное преобразование обнаружений вступлений для случая вступлений Р-волны и непрерывное обнаружение вступлений для случая вступлений S-волны. Способ может также включать в себя непрерывное вычисление поляризаций трехкомпонентных сейсмических сигналов по микросейсмическим данным. Кроме того, картирование может включать в себя сравнение полученного прямым моделированием вступления Р-волны с вычисленной трехкомпонентной поляризацией путем взвешивания вклада при сопоставлении полученного моделированием направления луча и трехкомпонентной поляризации и определение на основе взвешивания направления на место расположения микросейсмического события относительно группы сейсмических детекторов.
Согласно еще одному объекту изобретения предложен способ гидравлического разрыва пласта. Способ содержит: (а) закачивание жидкости в ствол скважины, (b) прием данных о сейсмических сигналах множеством сейсмических детекторов в стволе скважины, (с) миграцию данных о сейсмических сигналах для образования эволюционирующей исторической карты, (а) интерпретацию эволюционирующей исторической карты в виде характеристики сейсмической энергии в объеме пространства, (е) идентификацию сейсмических событий и (f) изменение параметров гидравлического разрыва на основе идентифицируемых сейсмических событий. Этапы (b)-(е) можно повторять, а оператора оповещать в реальном времени. Способ может дополнительно включать в себя идентификацию точек, представляющих интерес, в дискретные моменты времени по эволюционирующей исторической карте на основании точек на карте, указывающих на источники значительной сейсмической энергии. Прием данных о сейсмических сигналах и миграция данных на эволюционирующую историческую карту могут быть полностью автоматизированы. Способ может включать в себя использование хеш-таблиц для сохранения заранее вычисленных значений до образования эволюционирующей исторической карты.
Согласно одному варианту осуществления настоящего изобретения предложена система для контроля микросейсмических событий, связанных с подземным пластом, окружающим ствол скважины. Система содержит множество сейсмических детекторов, компьютер в связи со множеством сейсмических детекторов и набор исполняемых компьютером инструкций, при исполнении которых образуется эволюционирующая во времени историческая карта микросейсмической активности путем пространственного картирования на основе сейсмических сигналов, принимаемых сейсмическими детекторами. При исполнении набора инструкций могут осуществляться интерпретация эволюционирующей исторической карты и идентификация микросейсмических событий. Кроме того, при исполнении набора инструкций оператор гидравлического разрыва может оповещаться в реальном времени о микросейсмических событиях. Согласно некоторым вариантам осуществления система включает в себя устройство гидравлического разрыва.
Согласно еще одному объекту изобретения предложено считываемое компьютером устройство хранения данных, закодированное программой инструкций, в том числе инструкций для образования эволюционирующей во времени исторической карты микросейсмической активности путем пространственного картирования, основанного на сейсмических сигналах, принимаемых одним или несколькими сейсмическими детекторами. Инструкции могут дополнительно содержать инструкции для обнаружения и определения местоположений микросейсмических событий по исторической карте.
Дополнительные преимущества и новые признаки изобретения будут изложены в описании, которое следует ниже, или они могут быть изучены специалистами в данной области техники при чтении этих материалов или практическом применении изобретения. Преимущества изобретения могут быть достигнуты с помощью средств, перечисленных в прилагаемой формуле изобретения.
Краткое описание чертежей
Сопровождающими чертежами иллюстрируются предпочтительные варианты осуществления настоящего изобретения и раздел описания. Совместно с нижеследующим описанием чертежами демонстрируются и поясняются принципы настоящего изобретения. На чертежах:
фиг.1 - блок-схема последовательности операций способа или процесса микросейсмического контроля согласно одному аспекту настоящего изобретения;
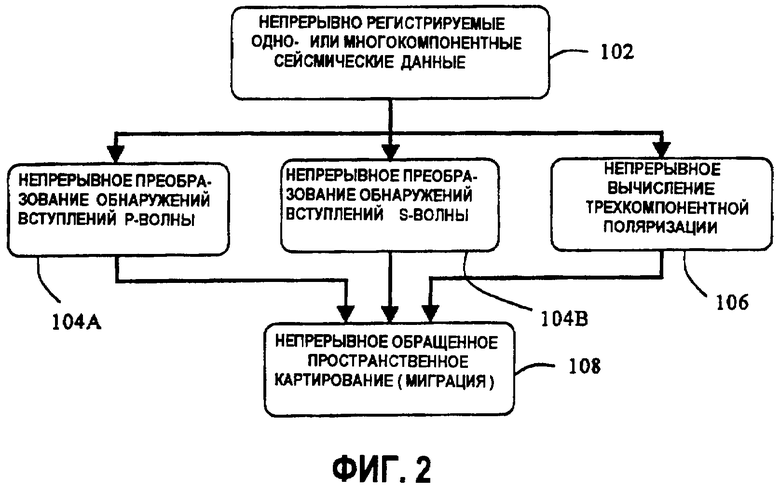
фиг.2 - часть блок-схемы последовательности операций из фиг.1, расширенной для показа непрерывного преобразования обнаружений вступлений согласно одному аспекту настоящего изобретения;
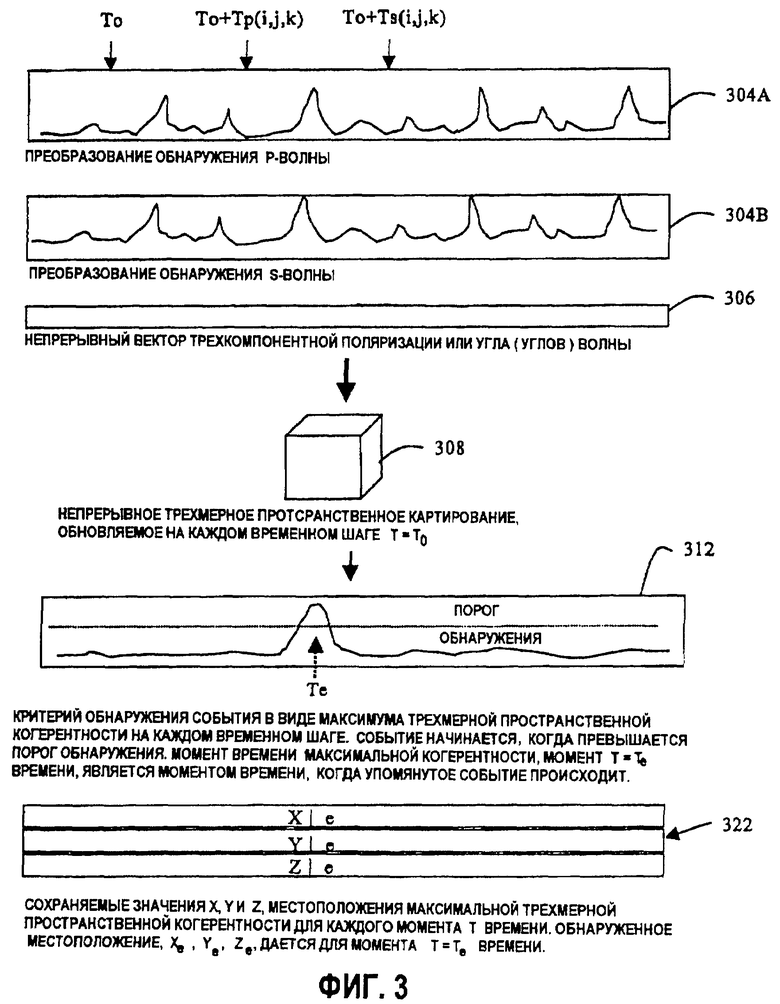
фиг.3 - иллюстрация образцов сигналов и применения функций контроля к сигналам согласно некоторым аспектам настоящего изобретения;
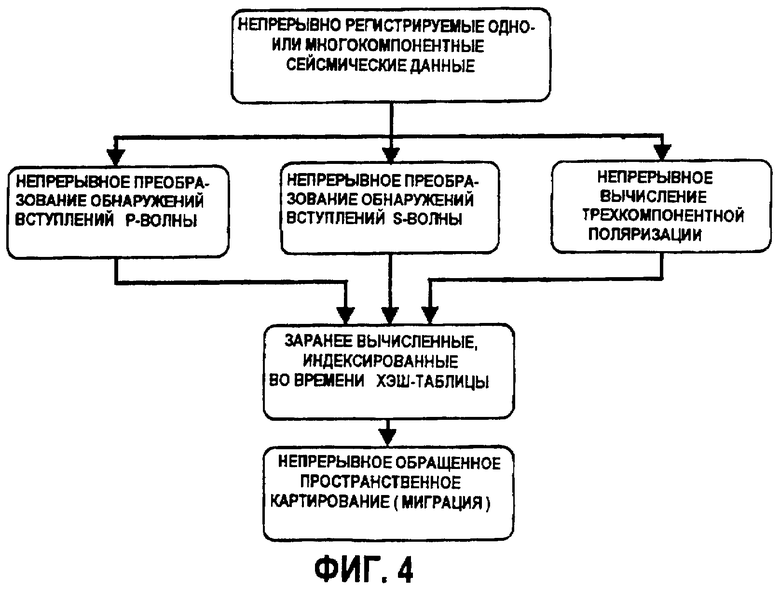
фиг.4 - блок-схема последовательности операций, расширенная по сравнению с показанной на фиг.2 для учета использования хеш-таблиц согласно одному варианту осуществления настоящего изобретения;
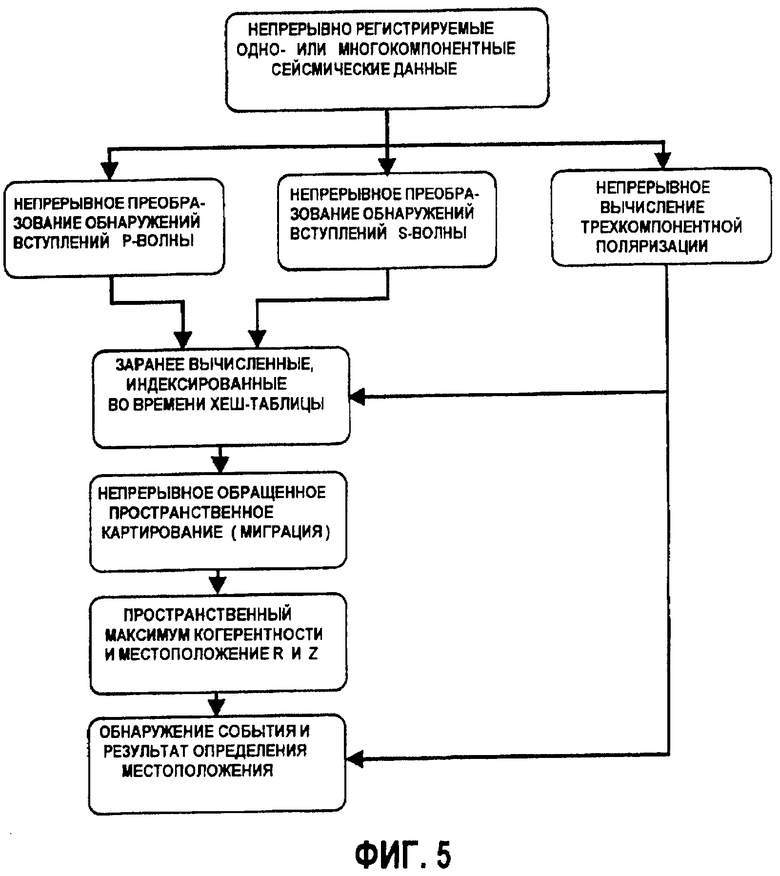
фиг.5 - блок-схема последовательности операций, расширенная по сравнению с показанными на фиг.1 и 4, для учета пространственной максимальной когерентности и функции местоположения согласно одному варианту осуществления настоящего изобретения;
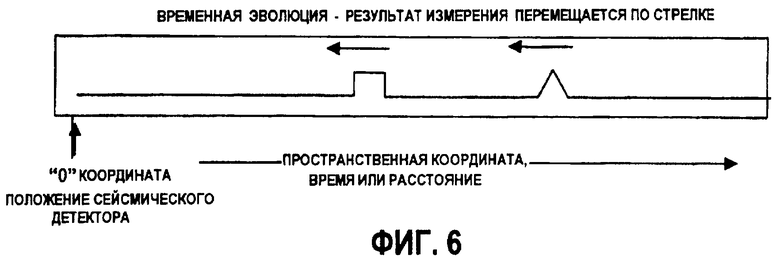
фиг.6 - вид тривиальной, эволюционирующей во времени карты сейсмического сигнала, принимаемого единственным сейсмическим детектором согласно одному аспекту настоящего изобретения;
фиг.7А - пример эволюционирующей во времени карты до максимального пространственного слияния, полученной с использованием единственного сейсмического детектора согласно одному аспекту настоящего изобретения;
фиг.7В - вид эволюционирующей во времени карты из фиг.7А при максимальном пространственном слиянии;
фиг.7С - вид эволюционирующей во времени карты из фиг.7А после максимального пространственного слияния;
фиг.8А - пример эволюционирующей во времени карты до максимального пространственного слияния, полученной с использованием нескольких сейсмических детекторов согласно одному аспекту настоящего изобретения;
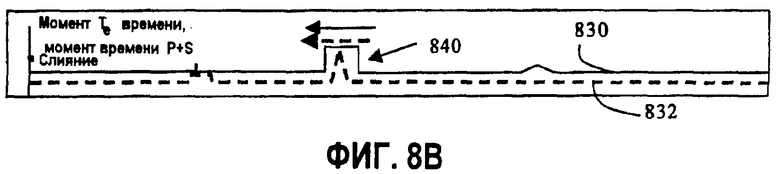
фиг.8В - вид эволюционирующей во времени карты из фиг.8А при максимальном пространственном слиянии;
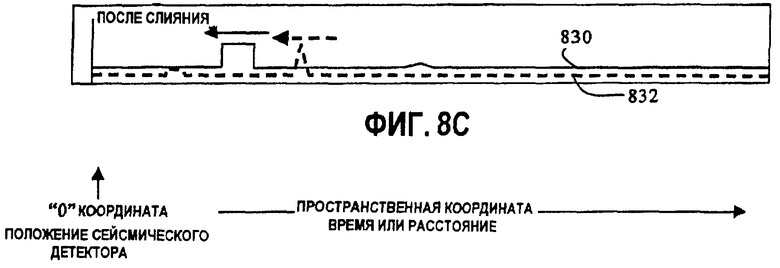
фиг.8С - вид эволюционирующей во времени карты из фиг.8А после максимального пространственного слияния;
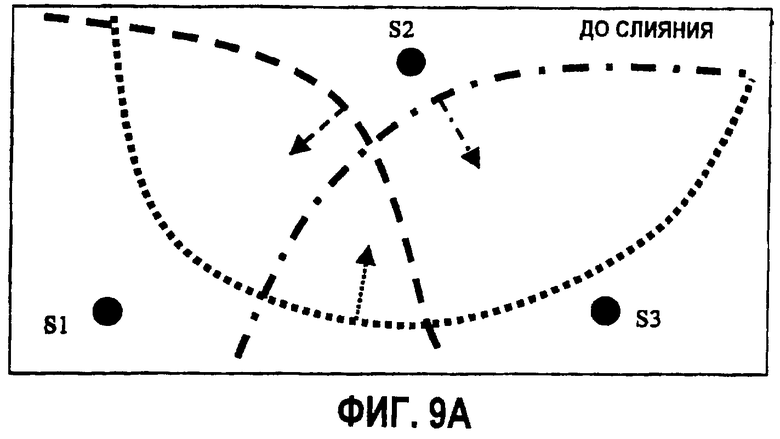
фиг.9А - моментальный снимок эволюционирующей во времени карты, отображающей сейсмический сигнал, измеряемый с помощью датчиков в трех местоположениях, до максимального слияния, согласно одному аспекту настоящего изобретения;
фиг.9В - моментальный снимок эволюционирующей во времени карты из фиг.9А при максимальном слиянии;
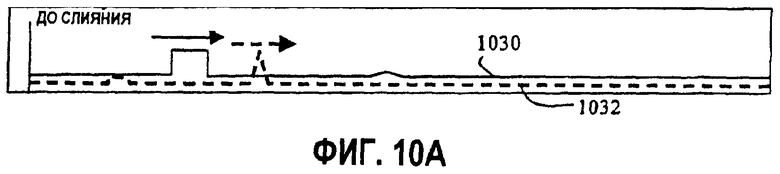
фиг.10А - пример эволюционирующей карты в обратном времени до максимального пространственного слияния, полученной при использовании нескольких сейсмических детекторов, согласно одному аспекту настоящего изобретения;
фиг.10В - вид эволюционирующей карты в обратном времени из фиг.10А при максимальном пространственном слиянии;
фиг.10С - вид эволюционирующей карты в обратном времени из фиг.10А после максимального пространственного слияния;
фиг.11 - пример моментального снимка разреза трехмерной пространственной карты, иллюстрирующего пространственное слияние непосредственно перед максимумом объединенного критерия обнаружения картированных событий и анализа поляризации волн для случая восьмиуровневой группы трехкомпонентных датчиков согласно одному варианту осуществления настоящего изобретения;
фиг.11В - моментальный снимок согласно фиг.11А при максимальном слиянии;
фиг.11С - моментальный снимок согласно фиг.11А после максимального слияния;
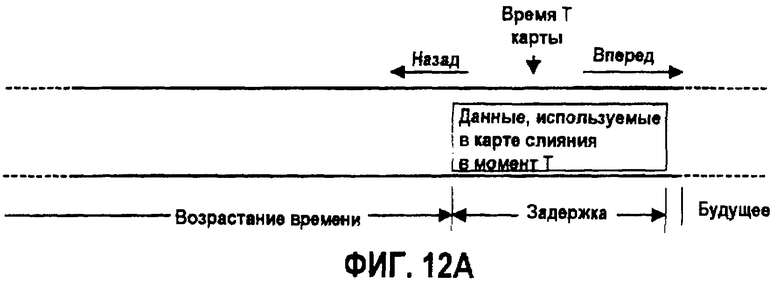
фиг.12А - иллюстрация процесса вычисления непрерывной карты слияния согласно одному аспекту настоящего изобретения;
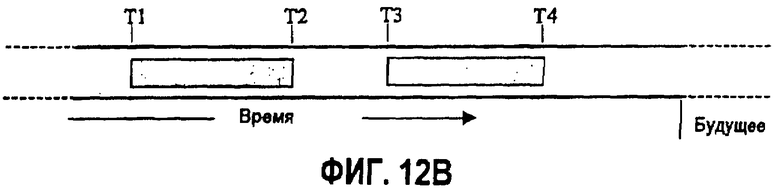
фиг.12В - иллюстрация процесса вычисления эволюционирующей карты слияния в пределах представляющих интерес временных окон, имеющих небольшую протяженность;
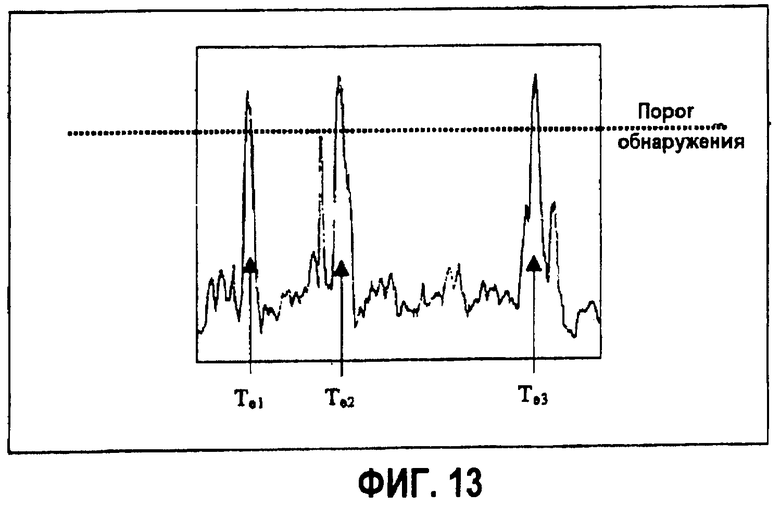
фиг.13 - пример диаграммы временной эволюции пространственного максимума когерентности согласно одному варианту осуществления настоящего изобретения; и
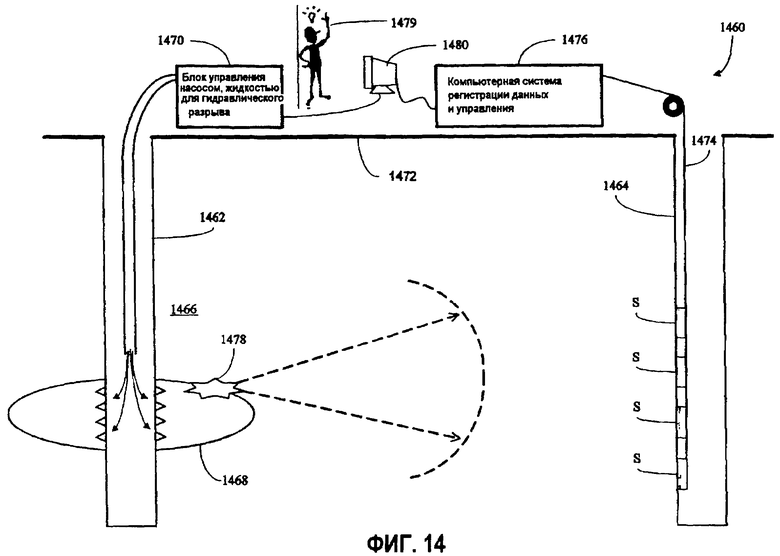
фиг.14 - вид системы сейсмического контроля и системы гидравлического разрыва пласта согласно одному варианту осуществления настоящего изобретения.
На всех чертежах идентичными позициями обозначены подобные, но необязательно идентичные элементы.
Подробное описание предпочтительных вариантов осуществления изобретения
Ниже описываются примеры вариантов осуществлений и аспекты изобретения. Конечно, должно быть понятно, что при разработке любого такого реального варианта осуществления с целью достижения конкретных целей разработчика, таких как удовлетворение системных и связанных с деловой активностью ограничений, должны приниматься многочисленные специфические для реализации решения, которые будут изменяться от одной реализации к другой. Кроме того, должно быть понятно, что такая работа может быть сложной и требующей больших затрат времени, но тем не менее должна быть обычной процедурой, выполняемой обычными специалистами в данной области техники, имеющими выгоду от этого раскрытия.
Используемые во всем описании и формуле изобретения термины «автоматический» или «автоматизированный» означают отсутствие вмешательства человека или интерпретации человеком. «Осуществлять слияние» или «слияние» означают сведение результатов различных измерений на карту, такую как пространственная карта. Слияние также означает оценивание эволюционирующих во времени вкладов от множества датчиков или компонентов, но не включает в себя нелинейных способов определения местоположений сейсмических событий. Термины «осуществлять слияние» или «слияние» могут быть дополнительно поняты при обращении к фигурам 7А-10С ниже. Термином «датчик» определяется единственное местоположение устройства, которое может иметь один или несколько «детекторов», с помощью которых можно получать результаты измерений в этом местоположении. Слова «включающий» и «имеющий», используемые в описании, в том числе в формуле изобретения, имеют то же самое значение, что и слово «содержащий».
В настоящем изобретении предполагаются контроль в реальном времени и моделирование роста трещин. Способы и системы, предложенные в настоящей заявке, облегчают преобразование микросейсмических сигналов, регистрируемых на одном или нескольких сейсмических детекторах, и преобразование сигнала с целью улучшения обнаружения вступлений. Соответственно посредством способов и систем осуществляют картирование или миграцию результата преобразования, используя набор времен пробега и просмотровые таблицы направлений лучей. Таким картированием или миграцией формируют непрерывно обновляемую двумерную или трехмерную историческую пространственную карту, такую, что моментальный снимок карты отображает степень правдоподобия наличия источника сейсмической энергии, имеющейся в то же время в каждой точке пространства.
Согласно аспектам настоящего изобретения осуществляют временную эволюцию карты, а путем оценивания максимальных значений карты, которые превышают порог обнаружения, определяют, является ли источник сейсмической энергии или событие появившимся в заданное время и в заданном местоположении. Путем выбора функции, которая обеспечивает слияние или корреляцию вкладов от каждого детектора, можно различать сейсмические источники, характеризуемые Р-волной, S-волной, или источники, формирующие как Р-, так и S-волны. Различать волны по типам можно, например, приняв во внимание, что Р- и S-волны имеют различные времена пробега и различные поляризации волн.
Согласно некоторым аспектам изобретения измерение времени и определение однозначного местоположения сейсмического события являются зависимыми от числа используемых сейсмических детекторов относительных положений детекторов и выбора функций, используемых для слияния или корреляции вкладов детекторов. На результирующей карте во время события отражается однозначность определяемого местоположения.
Картированием с целью формирования эволюционирующей исторической карты источников сейсмической энергии согласно принципам настоящего изобретения предоставляется большое количество преимуществ по сравнению с традиционными способами обнаружения и пикинга времен вступлений для отдельных сейсмических детекторов. Некоторые из этих преимуществ рассматриваются ниже. Например, способы и системы настоящего изобретения могут быть полностью автоматизированными и способными работать непрерывно во времени для мониторинга, обнаружения и определения местоположения микросейсмических событий. В способах настоящего изобретения используют вклады от одного или множества сейсмических детекторов. Путем слияния или корреляции вкладов от множества сейсмических детекторов могут быть обнаружены те события и определены их местоположения, которые не могут быть обнаружены, прослежены во времени и местоположения которых не могут быть определены традиционными способами, при которых анализируют сигналы исключительно от отдельных сейсмических приемников. Путем изменения функции слияния способы настоящего изобретения могут быть приспособлены для обнаружения событий, характеризующихся различными параметрами источников. Использованием принципов настоящего изобретения обеспечивается однозначность определения местоположения события, обусловленная результатами сейсмических измерений, геометрией сейсмических детекторов и выбором функции слияния. Поэтому способами настоящего изобретения упрощается решение для сложных геометрии, геологии и геофизических моделей, что позволяет получать и использовать моделированные путем решения прямой задачи времена пробега и траектории лучей, при этом их получают любым из подходящих и хорошо исследованных способов геофизического моделирования. При использовании принципов настоящего изобретения также исключается необходимость интерактивного и неавтоматизированного обнаружения дискретных вступлений и точного пикинга значений времени, характерных для способов, известных из уровня техники. Автоматизация процесса выбора и пикинга значений времен эквивалентных вступлений для нескольких сейсмических детекторов может быть трудной, и для ее осуществления часто необходима продолжительная интерактивная и интерпретирующая процедура.
Теперь обратимся к фигурам и, в частности к фиг.1, на которой показана блок-схема последовательности операций способа или процесса контроля микросейсмических событий согласно одному варианту осуществления настоящего изобретения. Согласно операциям, показанным на фиг.1, способ может быть осуществлен относительно непрерывных данных или на полунепрерывной основе путем использования временных окон данных небольшой протяженности, что отражено блоком 102. В способе предполагается последовательность преобразований, которые могут включать в себя непрерывные преобразования 104 обнаружений вступлений и/или непрерывное вычисление трехкомпонентной поляризации 106. После преобразований осуществляют картирование или миграцию 108. Результатом процесса картирования является непрерывное значение, характеризующее максимальное слияние на пространственной карте наряду с местоположением 110 максимального слияния. Время и местоположение максимального слияния, превышающие порог обнаружения, соответствуют измеренным времени и местоположению того события, которое представлено блоком 112 как происшедшее.
Согласно некоторым аспектам настоящего изобретения при непрерывном преобразовании 104 обнаружений вступлений учитывается сигнатура регистрируемого сейсмического сигнала и улучшается обнаружение вступлений. Поэтому преобразование может включать в себя взаимную корреляцию и деконволюцию (фильтрацию) для усиления или улучшения измерения сигнала с заданной формой волны. Преобразование может также включать в себя алгоритмы обнаружений вступлений или любой простой характеристики вступления, такой как энергия волны или беззначная амплитуда волны. Если требуется точное измерение только местоположения события, преобразование обнаружений может быть сделано для любой характеристики сигнала первого вступления при условии, что измерением обеспечивается аналогичная характеристика для каждого из сейсмических детекторов. Для получения точного времени события необходимо знать, каким образом преобразование обнаружения связано со временем первого вступления, но согласно этому способу в других случаях эта связь не является необходимой.
Одним примером преобразования, которое может быть использовано, является вариация критерия обнаружения в виде отношения кратковременного усреднения к долговременному усреднению с использованием огибающей Гильберта, описанная в патенте США №6748330, который посредством этой ссылки полностью включен в настоящую заявку. Способ отношения кратковременного усреднения к долговременному усреднению и варианты способа хорошо известны специалистам в данной области техники, имеющим выгоду от этого раскрытия, и обычно используются для повышения качества вступления в способах автоматического обнаружения вступления и пикинга значений времени. Однако также могут быть применены любые способы, включая способы, в которых используют многокомпонентную прямолинейность или в которых усиление или обнаружение вступлений осуществляют с учетом изменений спектров сигналов. См., например, Moriya H. et al., 1996.
Однако в отличие от известных способов согласно принципам настоящего изобретения критерий обнаружения не используют непосредственно для обнаружения и пикинга значений времени или идентификации какого-либо конкретного сигнала вступления. Точнее, результат непрерывно картируют в двумерном или трехмерном пространстве, используя полученные моделированием времена пробега. Затем осуществляют обнаружение по изменению двумерной или трехмерной карты, которое является результатом вкладов от одного или нескольких сейсмических детекторов, расположенных в одном или более датчиках.
Согласно некоторым вариантам осуществления в случае, когда имеется достаточное число соответствующим образом расположенных сейсмических детекторов, определение однозначного местоположения микросейсмической энергии может быть сделано вне зависимости от того, осуществлены или нет идентификация, моделирование и картирование источника как определенно сейсмического источника Р-волн, определенно сейсмического источника S-волн или многофазного сейсмического источника. Для однозначного определения местоположения в трехмерном пространстве путем использования времен вступлений единственной фазы (Р или S) необходимо измерить, как минимум, четыре времени вступлений. Это эквивалентно явлению, обнаруженному в глобальной системе позиционирования. Четырьмя результатами измерений определяются четыре неизвестных: время и три пространственные координаты. Необходимо, чтобы четыре датчика были соответствующим образом расположены в пространстве (то есть они не могут все находиться в одной плоскости). Однако сделав предположение относительно местоположения источника (например, установив, что источник возбуждался на двумерной плоскости) или зафиксировав момент времени излучения источника с помощью другого измерения (например, измерения времени события по электромагнитному сигналу), число сейсмических детекторов, необходимых для определения однозначного местоположения, можно уменьшить до трех.
В некоторых случаях известно, что сейсмический источник излучает сейсмические Р- и S-волны. Эта информация может быть использована для дополнительного наложения связей на картирование и определения местоположения источника. Поэтому меньшее число более просто размещенных сейсмических детекторов может быть достаточным для определения однозначного местоположения источника микросейсмической энергии и картирования гидравлического разрыва. С помощью единственного трехкомпонентного или четырехкомпонентного детектора, способного измерять поляризацию (направление на событие) Р-волны и времена (расстояние до события) вступлений Р- и S-волн, можно определить местоположение события. Используя один трехкомпонентный детектор, можно найти два возможных решения, не делая дополнительных предположений относительно общего направления на источник. Используя четырехкомпонентный детектор или добавив один или несколько сейсмических детекторов, можно определить единственное однозначное местоположение. Эти принципы должны быть хорошо понятными специалистам в области определения местоположения микросейсмических событий, имеющим выгоду от этого раскрытия.
Согласно одному примеру компоновки, показанной с помощью блок-схемы последовательности операций на фиг.2, непрерывное преобразование обнаружения по критерию отношения кратковременного усреднения к долговременному усреднению при движущемся окне применяют к измеряемому сейсмическому сигналу для каждой вертикальной группы из восьми трехкомпонентных сейсмических детекторов, так что преобразование является чувствительным к вступлению 104А Р-волны или к вступлению 104 В S-волны. Преобразование 104А/104 В делают чувствительным к вступлениям Р- или S-волн путем учета ожидаемой проекции Р-волны и ожидаемой проекции S-волны для каждого из трехкомпонентных сейсмических детекторов, предположив, что место расположения источника находится в данном общем направлении. Поэтому возможность обнаружения сейсмических событий повышается.
В соответствии с еще одним примером принципов реализации настоящего изобретения поляризация 106 трехкомпонентного обнаруживаемого сигнала может быть вычислена на непрерывной основе путем использования ковариационного анализа с движущимся окном и разложения собственного вектора. Поляризация 106 волны может быть использована для картирования в дополнение к критерию обнаружения вступления. Осуществляя сравнение полученного прямым моделированием вступления Р-волны и вычисленной трехкомпонентной поляризации сейсмической волны для каждого местоположения на трехмерной карте, можно снабдить весами вклад или слияние путем сопоставления полученного моделированием направления луча и трехкомпонентной поляризации волны. Например, весовой функцией, полученной путем сопоставления поляризации Р-волны и модели, определяется азимут местоположения события относительно вертикальной группы детекторов, рассмотренной выше. В случае вертикальной группы сейсмических датчиков S (каждый из которых имеет один или несколько детекторов), такой, как группа, показанная на фиг.14, однозначное местоположение события не определяется другим способом.
Как показано на фиг.1, на каждом временном шаге Т=Т0 трехмерное пространственное картирование или миграцию осуществляют по критерию обнаружения и необязательно по трехкомпонентной поляризации Р-волны. Предпочтительно, чтобы картирование осуществлялось с помощью набора полученных прямым моделированием времен пробега и просмотровых таблиц трассированных лучей. При осуществлении временной эволюции картирования можно использовать постоянную Тс времени и выполнять операции рекурсивно, чтобы получать вклады от нескольких датчиков для суммирования в пространстве и во времени.
В заданный момент Т0 времени вклад в пространственное местоположение Xi, Yj, Zk имеет вид суммы вкладов критерия обнаружения от каждого из нескольких многокомпонентных сейсмических детекторов. Согласно некоторым аспектам используют произведение критериев обнаружения Р- и S-волн, взвешенное путем сопоставления полученной моделированием и измеренной поляризации Р-волны. В таком случае временной шаг эволюции и вклада для одного сейсмического детектора имеет вид:
 ,
,
где P_SNR - отношение сигнал/помеха при обнаружении Р-волны в момент T0+Tp(i,j,k) времени;
S_SNR - отношение сигнал/помеха при обнаружении S-волны в момент T0+Ts(i,j,k) времени; и
Р_Match=1 - точечный элемент (полученный моделированием Р_вектор (i,j,k), вектор волны (T0+Tp(i,j,k))2.
В случае множества сейсмических детекторов осуществляют суммирование P_SNR*S_SNR*P_Match, тем самым суммируя пространственный вклад каждого приемника в каждом местоположении, на каждом временном шаге.
Рекурсивное уравнение (1) представляет собой численно эффективный способ более общего способа с использованием суммы взвешенных во временном окне вкладов с использованием функции временного окна, такого как окно Хеннинга. Как описано выше, цель применения функции временного окна или рекурсивной постоянной Тс заключается в том, чтобы вклады нескольких замеров от одного или нескольких датчиков не попадали друг на друга вследствие неточностей, полученных моделированием времен пробега, используемых при картировании.
Функция вклада, определяемая уравнением (1), используемая в случае группы многокомпонентных детекторов в качестве показателя слияния вступлений Р- и S-волн, не является единственной. Может быть использована любая функция, в которой учитывается вклад в виде суммы, произведения или показателя степени вклада от критерия обнаружения Р- или S-волн или как Р-, так и S-волн, а также при желании степени соответствия между полученной прямым моделированием и измеренной трехкомпонентной поляризацией.
Выбор функции вклада или корреляции зависит от требуемой чувствительности по отношению к сейсмическим источникам только Р-волны, только S-волны или только P+S-волн. Согласно одному примеру осуществления при использовании и обнаружении наиболее подходящих сейсмических источников, которые обеспечивают получение вступлений Р- и S-волн, местоположения, определяемые с помощью единственной вертикальной группы сейсмических детекторов, являются более локализованными.
Способ, описанный выше, отражен на фиг.3, где показаны примеры трансформанты 304А обнаружения Р-волны, трансформанты 304В обнаружения S-волны и непрерывного трехкомпонентного вектора поляризации или углов поляризации 306 волны. Затем следует непрерывное трехмерное пространственное картирование 308, и оно обновляется на каждом временном шаге Т=Т0. Критерием 312 обнаружения события является максимум трехмерного пространственного слияния на каждом временном шаге. Сейсмическое событие начинается, когда превышается порог обнаружения. Момент максимального слияния, момент Т=Те времени, является временем проявления события. Значения X, Y и Z для местоположений максимального трехмерного пространственного слияния сохраняют для каждого момента Т времени. Обнаруженные значения Xe, Ye, Ze для местоположения события, определенные для момента Т=Те времени, показаны в блоке 322.
Принципы настоящего изобретения не ограничены конкретными способами, описанными выше. Кроме того, могут быть реализованы варианты способов, описанных выше, например, с целью повышения эффективности вычислений. Одним примером такого варианта может быть показанное на фиг.4 использование хеш-таблиц для сохранения предварительно вычисленных значений до картирования. Путем использования хеш-таблиц можно свести трехмерное пространственное картирование или миграцию до простого суммирования вкладов от каждого из сейсмических детекторов. Использование хеш-таблиц для оптимизации вычислительных кодов и других применений хорошо известно специалистам в данной области техники, имеющим выгоду от этого раскрытия.
Еще один вариант, включающий способы настоящего изобретения, показан на фиг.5 с помощью блок-схемы последовательности операций. Если сейсмические детекторы в системе контроля микросейсмических событий имеются в виде единственной вертикальной группы датчиков, то, используя цилиндрические координаты, способ можно осуществлять с эффективным картированием и определением местоположения события, используя всего лишь двумерное картирование. Двумерное картирование осуществляют как функцию R, которое определяется как расстояние от группы и положения Z. Если обнаружение события происходит в момент Те времени, который является моментом максимального слияния двумерного отображения, по отображению также определяют расстояние R и положение Z события. В таком случае азимутальный угол события относительно группы может быть определен на основании поляризационного анализа вступающей Р-волны.
Как описывается ниже, способы, описанные выше, были реализованы для контроля микросейсмических событий. Анализировали сигналы, регистрируемые с помощью вертикальной группы из восьми трехкомпонентных сейсмических датчиков. Основываясь на геометрии, ориентации датчиков и ожидаемом направлении вступления микросейсмической энергии, трехкомпонентные сигналы проецировали относительно номинальной поляризации Р-волны и горизонтальной поляризации S-волны. Р-волна с номинальной поляризацией и S-волна с горизонтальной поляризацией были обнаружениями, преобразованными путем использования критерия обнаружения по отношению кратковременного усреднения к долговременному усреднению огибающей Гильберта. Путем использования полученных моделированием времен пробега трассированных лучей и просмотровых таблиц направлений сейсмических лучей, применяя способы, описанные выше, осуществляли миграцию зарегистрированных данных для обновления на непрерывной основе трехмерного объема (пространственной карты).
Общая форма карты может быть принята одномерной, двумерной или трехмерной. Двумерная карта может быть образована из нескольких одномерных карт, а трехмерная карта может быть образована из нескольких двумерных карт. Пространственными координатами карты могут быть положение, расстояние или местоположение в одном, двух или трех измерениях.
В случае однородной пространственной скоростной модели преобразование временной координаты в пространственную координату или координату расстояний является простой скалярной величиной (скоростью). Поэтому в таком случае "временную координату" считают эквивалентной "пространственной координате".
Поскольку карта является эволюционирующей во времени, трудно показать или отобразить результат картирования на статических чертежах. Исключением является одномерная карта. Одномерная карта может быть отображена графически как двумерное изображение временной эволюции. Чтобы отобразить двумерную карту, необходимо изобразить поверхность изменения, а для трехмерной карты необходимо изобразить объем изменения. Поэтому ниже описывается эволюционирующая карта в виде нескольких статических моментальных снимков. Одномерная карта, являющаяся результатом сигнала единственного сейсмического детектора, может быть тривиальной картой. Для полноты картины на фиг.6 показан моментальный снимок тривиальной одномерной карты для случая единственного сейсмического детектора. Одномерная карта представляет собой график эволюционирующей во времени характеристики сейсмического сигнала, при этом характеристика сигнала является отображением характеристики, представляющей интерес. Однако эта карта является тривиальной и малоинтересна.
Любые многократные измерения сигнала, представляющего интерес (с одного или нескольких сейсмических детекторов), могут быть отображены как карта слияния. Согласно настоящему изобретению карта слияния является исторической и эволюционирующей во времени. В случае простого одномерного образца сигнала, регистрируемого с помощью единственного сейсмического детектора, сигнал может быть интерпретирован в виде характеристик Р-волны и S-волны. После этого на основе этих характеристик образуют карту слияния.
Р-волны и S-волны распространяются с различными скоростями. Поэтому пространственной координатой является измеренное расстояние или измеренное время, относящее к скорости Р-волны или скорости S-волны. В соответствии с примером, показанным на фиг.7А-7С, сигнал картируют дважды, используя единственный детектор, один раз используя скорость 730 Р-волны и один раз используя скорость 732 S-волны. Сигнал может содержать Р-волны 734 и S-волны 736 на обеих скоростях. На фиг.7А-7С показаны во времени три моментальных снимка эволюционирующей карты. На фиг.7А показан моментальный снимок в момент времени до слияния. На фиг.7В показан момент слияния, при этом измеренные волны сливаются в точке 740. На фиг.7С показана карта после слияния. Поскольку этот процесс заключается в перемещении сигнала обратно в его пространственное исходное положение (во времени или по расстоянию), его можно описать как процесс миграции вместо термина «картографическая миграция», используемого в настоящей заявке. При временной эволюции карты из фиг.7А-7С выявляются Р-волна 730 и S-волна 732, распространяющиеся с различными скоростями. Конечный результат или карта слияния представляет собой эволюционирующий во времени результирующий вклад сигналов двух волн. Вклад Р-волны 730 и S-волны 732 может быть простой суммой или произведением двух сигналов, или некоторой функцией, образующей количественный показатель вклада двух сигналов.
Когда один или более сейсмических датчиков содержат трехкомпонентный или же многокомпонентный детектор, сейсмические сигналы 830 Р-волны и сигналы 832 S-волны, показанные на фиг.8А-8С, также имеют в себе показатель поляризации волны. Р-волны и S-волны имеют различные поляризации. Поэтому может быть образована функция слияния, в которой учитывается поляризация волны. Такая функция будет показывать слияние только тогда, когда Р- и S-волны совпадают с удовлетворительной степенью (как показано на фиг.8В), и не будет показывать его, когда совпадают две Р-волны или две S-волны. В точке 840 совпадения имеется случай присутствия энергии P+S-волн на правильном расстоянии и в точный момент времени. Поэтому может быть исключено случайное слияние двух Р-волн или двух S-волн, которые могут быть следствием, например, двух независимых сейсмических событий.
В дополнение или как вариант к слиянию Р-волны и S-волны в способах настоящего изобретения также предусматривается пространственное слияние сигналов множества сейсмических датчиков, находящихся в различных местоположениях. Для измерения однозначного местоположения в двумерном пространстве в случае одной фазы (сигнала Р-волны или сигнала S-волны) необходимо иметь, как минимум, три сейсмических датчика. Для однозначного определения местоположения в трехмерном пространстве могут потребоваться, как минимум, четыре датчика. Временная эволюция карты является показателем слияния, который является показателем, представляющим интерес.
Двумерная (или трехмерная) карта может быть образована путем интерпретации и картирования сигналов только Р-волны, только S-волны или P+S-волн. Карта может быть образована путем непосредственного картирования сигналов, или сигналы могут быть эффективно картированы путем использования одномерных, индексированных во времени карт, образованных для каждого из одно- или многокомпонентных датчиков. Индексированные во времени одномерные карты называются хеш-таблицами. По хеш-таблицам можно заранее вычислить показатель слияния P+S-волн для каждого детектора и тем самым упростить вычисление двумерной или трехмерной пространственной карты слияния. На фиг.9А-9В показано пространственное картирование слияния для случая трех местоположений датчиков, S1, S2 и S3. На фиг.9А показан моментальный снимок во времени пробега волновых сигналов до слияния, а на фиг.9В показана диаграмма для момента Те времени, момента слияния, при этом сигналы сведены вместе в точке 940.
Может быть образована двумерная или трехмерная карта, которую можно рассматривать как несколько одномерных карт. Кроме того, на двумерных и трехмерных картах можно просуммировать вклады от множества сейсмических детекторов и образовать двумерную или трехмерную карту слияния. В случае множества сейсмических детекторов, пространственно разнесенных и расположенных на различных местах нахождения датчиков, например в случае, показанном на фиг.9А-9 В, временная эволюция двумерной или трехмерной карты слияния любой характеристики сигнала может представлять интерес. Картирование функции слияния характеристик сейсмического сигнала, когда они относятся только к Р-волне, только к S-волне или к обеим Р- и S-волнам, приводит к образованию карты, отражающей слияние вкладов от множества детекторов. Временная эволюция карты слияния дает микросейсмические события, представляющие интерес.
Приведенное выше описание относительно картирования слияния, прямого картирования или «задержанного» прямого картирования слияния находится в связи с временной эволюцией карты в прямом направлении (при возрастании времени). «Задержка» относится к образованию карты реального времени (поскольку данные регистрируют) с временной задержкой, эквивалентной времени распространения с самого дальнего расстояния, охватываемого картой.
Однако также можно образовать обращенную карту слияния. В случае обращенной карты слияния время течет в обратном направлении. Результирующая карта может быть математически эквивалентной прямой карте (но воспроизводимой в обратном направлении) или может быть математически иной. Согласно примерам, приведенным выше, используют рекурсивную функцию, включающую в себя постоянную Тс времени. Рекурсивная функция означает, что следующий временной шаг зависит от ранее вычисленного результата. Поэтому получающиеся в результате прямая и обращенная карты могут не быть эквивалентными.
В случае образованной в обратном направлении карты подразумевается, что она недоступна в реальном времени (то есть она может быть образована только после того, как данные зарегистрированы). Тем не менее, реальное время возможно, если карту «воспроизводят назад» или вычисляют на протяжении небольшого временного окна данных, представляющих интерес, на основе непрерывного прямого времени. На фиг.10А-10С показана эволюция в обратном времени карты слияния Р- и S-волн 1030, 1032.
Раскрытые здесь непрерывные карты могут быть отображены операторам несколькими способами. В зависимости от числа измерений отображения карт могут различаться. Примеры одномерного, двумерного и трехмерного отображений карт описываются ниже.
Отображение в одномерном пространстве может быть эволюционирующей во времени картой, описанной выше. Кроме того, можно получить временную эволюцию карты в виде двумерного изображения. Например, горизонтальная ось может быть определена как одномерная пространственная координата, а вертикальная ось может быть определена как временная эволюция карты. Поэтому значение или показатель слияния можно представить в виде цвета, плотности или контура или в виде двумерной поверхности, имеющей высоту.
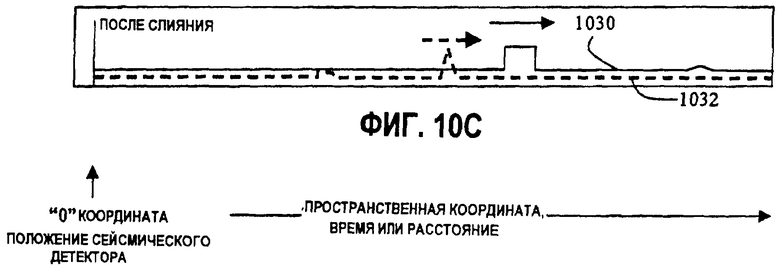
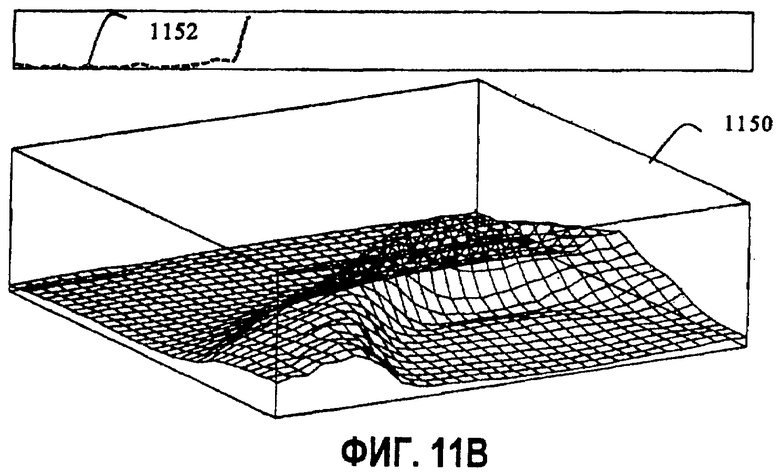
Двумерную карту или отображение поверхности можно исключительно легко воспроизвести как анимацию или как последовательность моментальных снимков. Две оси поверхности представляют пространственные координаты, при этом значение поверхности (показатель слияния) отображают, например, в виде цвета, плотности, контура или двумерной поверхности, имеющей высоту. Значение поверхности изменяется во времени. Временная эволюция максимальных значений слияния может быть получена и отображена простой диаграммой. На фиг.11А-11С показан один пример карты 1150 слияния, образованной картированием обработанных сигналов 1152, измеренных, например, с помощью группы из восьми трехкомпонентных сейсмических датчиков. На фиг.11А-11С показаны соответственно мгновенный снимок непосредственно перед слиянием, при слиянии и после слияния.
Один способ отображения трехмерной карты заключается во временной эволюции поверхности равных значений. Например, может быть показана поверхность равных значений, охватывающая объем, представляющий 10% максимального показателя слияния. Значение слияния может быть отображено цветом или затененностью. Временная эволюция трехмерной пространственной карты является видимым представлением трехмерного пространственного показателя слияния и может быть автоматически интерпретирована как трехмерный пространственный показатель микросейсмичности.
Микросейсмичность может определяться характеристикой сейсмического источника Р-волн, сейсмического источника S-волн или только характеристиками сейсмических источников Р- и S-волн. Когда показатель слияния может быть выражен численно, результирующая карта может быть использована количественно в качестве степени вероятности обнаружения источника сейсмической энергии при экспериментальном исследовании, измерении, картировании и интерпретации.
В настоящей заявке карты слияний отображаются слева направо по естественному направлению возрастающего прямого времени. На фиг.12А показан процесс вычисления непрерывной задержанной прямой карты слияния. Слева от фиг.12А находится начальная точка, обозначающая начало регистрации данных. Справа должна быть конечная точка, в которой время регистрации заканчивается. Следовательно, время «Т» возрастает слева направо. В качестве альтернативы эквивалентная карта слияния в обратном времени может быть вычислена после регистрации всех данных, представляющих интерес. Кроме того, согласно некоторым вариантам осуществления карта слияния, относящаяся к регистрируемым данным, может быть образована на протяжении небольших по протяженности временных окон, представляющих интерес. Например, как показано на фиг.12В, карты слияний могут быть образованы в первом окне, определенном между моментами Т1 и Т2 времени, и втором окне, определенном между моментами Т3 и Т4 времени. Эволюционирующая во времени карта слияния может быть вычислена вперед или назад на протяжении небольшого или значительного по протяженности окна.
Максимальное значение когерентности или слияния на каждом временном шаге и его местоположение регистрируют так, как рассмотрено выше относительно одномерной, двумерной или трехмерной карты слияния. Для карты слияния события идентифицируют так, как показано на фиг.13. На фиг.13 представлен пример диаграммы временной эволюции пространственной максимальной когерентности. На фиг.13 три микросейсмических события идентифицированы как Te1, Te2 и Те3. Моменты Tei времени соответствуют наиболее вероятным временам событий, определяемым на основании анализа (картирования) регистрируемых данных.
Специалистам в данной области техники, имеющим выгоду от этого раскрытия, должно быть понятно, что приведенные в настоящей заявке описания способа образования карты слияния из исходных регистрируемых сигналов являются примерными. Кроме того, до картирования могут быть применены многочисленные способы анализа сигналов, включающие в себя процессы преобразования обнаружения согласно принципам настоящего изобретения. Характеристики сигнала могут быть связаны с характеристиками энергии (амплитудой), прямолинейностью или изменениями частотного состава сигналов. Более того, они могут быть характеристиками сигналов Р- и S-волн в добавление к поляризации волн, включая анализ частотного состава.
Способы и системы, описанные выше, могут быть реализованы в реальном времени, как, например, система 1460 гидравлического разрыва пласта и контроля, показанная на фиг.14. Предпочтительно, чтобы система 1460 гидравлического разрыва пласта и контроля была расположена относительно стволов 1462 и 1464 первой и второй скважин. Ствол 1462 первой скважины пересекает пласт 1466 с зоной 1468, которая намечена для гидравлического разрыва. Система 1470 гидравлического разрыва, содержащая жидкость для гидравлического разрыва, насос и блок управления, соединена со стволом 1462 первой скважины. Ствол 1464 второй скважины содержит один или более временных или постоянных сейсмических датчиков S, но предпочтительно, чтобы он содержал множество датчиков. В качестве альтернативы датчики S могут быть размещены по поверхности 1472 или внутри ствола 1462 первой скважины. Посредством кабеля связи, такого, как телеметрический кабель 1474, обеспечивается связь между датчиками S и компьютерной системой 1476 регистрации данных и управления. С началом работ по гидравлическому разрыву пласта жидкость для гидравлического разрыва закачивают в ствол 1462 первой скважины, создавая микросейсмические события 1478, поскольку зона 1468 растрескивается и расширяется. Микросейсмические события 1478 создают сейсмические волны, которые принимаются детекторами датчиков S.
Сейсмические сигналы, принимаемые датчиками S, могут быть использованы для контроля и картирования микросейсмических событий, вызванных операцией гидравлического разрыва. Поэтому на основе принимаемых сейсмических сигналах в компьютерах, таких как компьютерная система 1476 регистрации данных и управления, могут выполняться программы, содержащие инструкции, при исполнении которых осуществляются способы согласно принципам, описанным в настоящей заявке. Кроме того, способы, описанные в настоящей заявке, могут быть полностью автоматизированы и могут выполняться непрерывно во времени с целью мониторинга, обнаружения и определения местоположений микросейсмических событий. Оператор 1479 может получать результаты способов, описанных выше, в реальном времени, поскольку они отображаются на мониторе 1480. В свою очередь, для оптимизации возбуждения скважины оператор 1479 на основании отображаемой информации, относящейся к обнаруженным сейсмическим событиям и к местоположениям их, может регулировать параметры гидравлического разрыва пласта, такие как давление накачки, давление жидкости для воздействия на пласт и концентрация расклинивающего агента.
Предпочтительные аспекты и варианты осуществления были выбраны и описаны с целью наилучшего пояснения принципов изобретения и практического применения его. Предшествующее описание предназначено для обеспечения возможности другим специалистам в данной области техники наилучшего использования изобретения в различных аспектах и вариантах осуществления и с различными модификациями, которые являются подходящими для конкретного предполагаемого использования. Описание может быть реализовано в любой системе измерений микросейсмических событий, в частности для контроля гидравлического разрыва пласта. Кроме того, способы могут быть запрограммированы и сохранены в виде набора инструкций, посредством которых при исполнении осуществляются способы, описанные в настоящей заявке. Предполагается, что объем изобретения определяется нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБРАБОТКИ МИКРОСЕЙСМИЧЕСКИХ ДАННЫХ | 2008 |
|
RU2457513C2 |
| Способ определения местоположения очага микросейсмического события | 2016 |
|
RU2620785C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СКВАЖИННАЯ СЕЙСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ НА ОСНОВЕ РЭЛЕЕВСКОГО ОБРАТНОГО РАССЕЯНИЯ | 2012 |
|
RU2561009C2 |
| СПОСОБ ДИАГНОСТИКИ ПРОЦЕССОВ ГИДРОРАЗРЫВА ПЛАСТА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАНИЯ ТРУБНЫХ ВОЛН И МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА | 2010 |
|
RU2455665C2 |
| РАСПРОСТРАНЯЮЩИЕСЯ ОБНОВЛЕНИЯ ПЛОСКОСТИ РАЗРЫВА | 2013 |
|
RU2594372C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ ПРОВЕРКИ ГЕОМЕТРИИ ТРЕЩИНЫ ДЛЯ МИКРОСЕЙСМИЧЕСКИХ СОБЫТИЙ | 2014 |
|
RU2637255C2 |
| ИДЕНТИФИКАЦИЯ ПЛОСКОСТЕЙ РАЗРЫВА ИЗ МИКРОСЕЙСМИЧЕСКИХ ДАННЫХ | 2013 |
|
RU2594369C1 |
| СПОСОБ МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИСТОЧНИКОВ ЭМИССИИ И РАССЕЯННОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278401C1 |







Предложенная группа изобретений относится к способам исследования подземных пластов для обнаружения и определения микросейсмических событий путем непрерывной картографической миграции. Данные изобретения направлены на достижение такого технического результата, как возможность непрерывно обновлять карту микросейсмических событий в режиме реального времени с исключением аппаратной погрешности, обусловленной использованием двух типов данных, зарегистрированных одними и теми же детекторами. Предложенный первый вариант способа контроля микросейсмичности содержит этапы, на которых: определяют полученные моделированием времена вступлений; принимают один или более сейсмических сигналов с помощью одного или более сейсмических детекторов; выполняют преобразование обнаружений принятых сигналов; картируют результаты преобразования обнаружений, включающие обнаружение разрыва с использованием полученных моделированием времен вступлений для формирования непрерывно обновляемой исторической пространственной карты таким образом, что карта отображает степень правдоподобия наличия источника сейсмической энергии, имеющейся в некоторое время, в пространстве, и оценивают значения карты для определения местоположений и времен микросейсмических событий. Второй вариант способа контроля микросейсмичности отличается от первого тем, что дополнительно выполняют преобразование принятых сигналов по отношению кратковременного усреднения к долговременному усреднению и картируют результаты с учетом указанного преобразования. 2 н.п. и 2 з.п. ф-лы, 14 ил.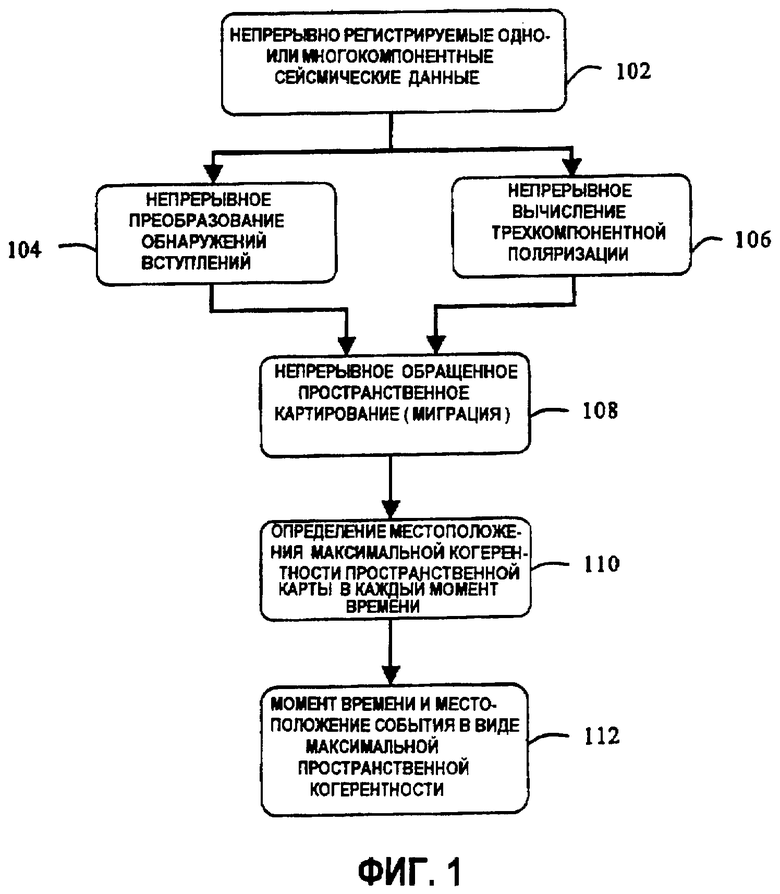
1. Способ контроля микросейсмичности, содержащий этапы, на которых:
определяют полученные моделированием времена вступлений;
принимают один или более сейсмических сигналов с помощью одного или более сейсмических детекторов;
выполняют преобразование обнаружений принятых сигналов;
картируют результаты преобразования обнаружений, включающие обнаружение разрыва с использованием полученных моделированием времен вступлений для формирования непрерывно обновляемой исторической пространственной карты таким образом, что карта отображает степень правдоподобия наличия источника сейсмической энергии, имеющейся в некоторое время, в пространстве; и
оценивают значения карты для определения местоположений и времен микросейсмических событий.
2. Способ по п.1, в котором картирование содержит использование следующего уравнения:

где Тс - постоянная времени;
P_SNR - отношение сигнал/помеха при обнаружении Р-волны в момент T0+Tp(i,j,k) времени;
S_SNR - отношение сигнал/помеха при обнаружении S-волны в момент T0+Ts(i,j,k) времени; и
P_Match=1-точечный элемент (полученный моделированием Р_вектор (i,j,k), вектор волны (T0+Tp(i,j,k))2.
3. Способ контроля микросейсмичности, содержащий этапы, на которых:
определяют полученные моделированием времена вступлений;
принимают один или более сейсмических сигналов с помощью одного или более сейсмических детекторов;
выполняют преобразование принятых сигналов по отношению кратковременного усреднения к долговременному усреднению (STA/LTA);
картируют результаты преобразования STA/LTA, включающие обнаружение разрыва с использованием полученных моделированием времен вступлений для формирования непрерывно обновляемой исторической пространственной карты таким образом, что карта отображает степень правдоподобия наличия источника сейсмической энергии, имеющейся в некоторое время, в пространстве;
оценивают значения карты для определения местоположений и времен микросейсмических событий.
4. Способ по п.3, в котором картирование содержит использование следующего уравнения:

где Тс - постоянная времени;
P_SNR - отношение сигнал/помеха при обнаружении Р-волны в момент T0+Tp(i,j,k) времени;
S_SNR - отношение сигнал/помеха при обнаружении S-волны в момент T0+Ts(i,j,k) времени; и
P_Match=1-точечный элемент (полученный моделированием Р_вектор (i,j,k), вектор волны (T0+Tp(i,j,k))2.
| US 5771170 А, 23.06.1998 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 5583825 А, 10.12.1996. | |||

