Изобретение относится к устройству для разделения штучных товаров, предназначенных для хранения в автоматизированном складском помещении, содержащему транспортировочное устройство для транспортировки штучных товаров из запаса товаров до несущей поверхности приемного устройства, устройство управления для управления транспортировочным устройством, датчик, соединенный с устройством управления и обнаруживающий удар штучных товаров о несущую поверхность, причем устройство управления прерывает транспортировку дополнительных штучных товаров на несущей поверхности, как только был обнаружен удар штучного товара или нескольких штучных товаров, устройство обнаружения, соединенное с устройством управления и предназначенное для обнаружения положения и ориентации штучных товаров, находящихся на несущей поверхности, при этом устройство обнаружения содержит устройство записи изображений, которое записывает по меньшей мере изображения обратной стороны приемного устройства, и устройство управления получает информацию о положении и ориентации штучных товаров, находящихся на приемном устройстве, из указанных изображений, и разгрузочное устройство, соединенное с устройством управления и предназначенное для снятия штучного товара с несущей поверхности для дальнейшей транспортировки в складское помещение, при этом устройство управления целенаправленно управляет разгрузочным устройством в соответствии с информацией о положении и ориентации, так что оно задерживает отдельный штучный товар.
Устройство разделения указанного выше типа известно, например, из документа Offenlegungsschrift DE 102004012133 A1. Известное устройство разделения применяют, в частности, для предоставления по отдельности большого количества прямоугольных штучных товаров, размеры которых сильно отличаются, особенно фармацевтических упаковок, которые изначально находятся в приемном контейнере, таким образом, что такие штучные товары можно хранить в автоматизированном складском помещении после определения их размеров и после их идентификации. В известном устройстве, например, ступенчатый конвейер или конвейерная лента с поперечными перегородками последовательно транспортирует пакеты из контейнера в проходящем под углом верх направлении, так что упаковки проходят над верхним краем ступенчатого конвейера или конвейерной ленты и затем падают на несущую поверхность. Несущей поверхностью является верхняя сторона пластины, состоящей из прозрачного или просвечивающегося материала, например стекла. Цифровой фотоаппарат, расположенный под пластиной, выполняет запись изображения, причем фотоаппарат сфокусирован таким образом, что выполняет запись поверхности, покрытой прямоугольными штучными товарами снизу. Идентифицирующую информацию об упаковках, находящихся на несущей поверхности, а также их ориентацию и положение определяют из записанных таким образом изображений. Определенные таким образом данные применяют для управления захватным устройством, которое хватает пакеты сверху и может снимать и отправлять отдельные пакеты в автоматизированное складское помещение.
Недостатки известного устройства разделения проявляются, с одной стороны, в относительно сложной обработке изображений и, с другой стороны, в ошибках при определении ориентации и положения, которые могут возникать за счет смещения луча, вызываемого преломлением света на граничных поверхностях стеклянной пластины.
В патенте на полезную модель DE 202004015264 U1 предложено сокращение ошибок при определении ориентации и положения посредством применения тонкой подложки (фольги или ткани), которая частично прозрачна для света и на которой проходящий свет, по меньшей мере частично, диффузионно рассеивается, в отличие от стеклянной пластины. Предложено, например, применять подложку в форме туго натянутой ткани. Также предложено выполнить и разместить один или несколько источников света над подложкой, так чтобы свет от источника света или источников света падал на всю верхнюю сторону подложки дифузионно во всех направлениях, за исключением областей поверхности, покрытых штучными товарами, находящимися на ней. Свет соответственно отражается или рассеивается серией поверхностей отражателей или рассеивателей, так что в каждой секции изображения подложки присутствует минимальная освещенность, за исключением областей поверхности, покрытых нижними поверхностями штучных товаров практически во всех возможных расположениях штучных товаров на подложке, т.е. таким образом, что идеальные тени практически не возникают.
Недостаток предлагаемого этой полезной моделью решения заключается в относительно сложной и ненадежной структуре подложки и источников света. Также было определено, что относительно сложно расположить соответствующим образом источники света и поверхности рассеивателей и отражателей таким образом, чтобы предотвратить ошибочные определения положения и ориентации нескольких штучных товаров, находящихся на подложке.
Исходя из уровня техники, целью изобретения является создание устройства разделения с относительно простой конструкцией, в котором снижена вероятность неправильного определения и различения расположенных рядом штучных товаров, находящихся на подложке.
В соответствии с изобретением такая цель достигается посредством устройства разделения с признаками, указанными в пункте 1 формулы изобретения.
В основе изобретения лежит устройство описанного выше типа. Прежде всего, это устройство для разделения штучных товаров, предназначенных для хранения в автоматизированном складском помещении, содержит транспортировочное устройство для транспортировки штучных товаров из запаса товаров на несущую поверхность приемного устройства. Такое транспортировочное устройство может состоять, например, из конвейерной ленты или - предпочтительно - ступенчатого конвейера. Запас товаров хранится, например, в ящике. Более того, устройство разделения содержит устройство управления для управления транспортировочным устройством, при этом это устройство управления предпочтительно содержит компьютер. Датчик для обнаружения предстоящего или фактического удара штучных товаров о несущую поверхность соединен с устройством управления. В данном контексте термин "предстоящий" удар штучного товара о несущую поверхность также включает, например, обнаружение штучного товара, падающего или сбрасываемого с верхнего края транспортировочного устройства в направлении несущей поверхности приемного устройства. Устройство управления прерывает транспортирование дополнительных штучных товаров на несущей поверхности, как только был обнаружен (предстоящий или фактический) удар штучного товара или нескольких штучных товаров о несущую поверхность. Применяемый датчик может состоять, например, из светового барьера или бесконтактного датчика. Удар нескольких штучных товаров обнаруживается, например, когда эти штучные товары транспортируются одновременно или практически одновременно на несущей поверхности посредством транспортировочного устройства. Более того, устройство разделения содержит устройство обнаружения, соединенное с устройством управления и предназначенное для определения положения и ориентации штучных товаров, находящихся на несущей поверхности, при этом устройство обнаружения содержит устройство записи изображений, такое как, например, фотоаппарат, осуществляющий запись по меньшей мере одного изображения обратной стороны несущей поверхности, приемное устройство, и устройство управления получает информацию о положении и ориентации штучных товаров, находящихся на несущей поверхности, из этого изображения. В данном контексте термин "положение и ориентация" включает местоположение штучного товара, находящегося на несущей поверхности, а также его ориентацию и его перпендикулярно проецированный профиль на несущей поверхности. Разгрузочное устройство для снятия штучного товара с несущей поверхности для дальнейшей транспортировки в складское помещение соединено с устройством управления, при этом устройство управления целенаправленно управляет разгрузочным устройством в соответствии с информацией о положении и ориентации, так что оно надежно хватает отдельный штучный товар. Такое разгрузочное устройство содержит, например, пару зажимов захватного устройства или предпочтительно вакуумное захватное устройство. В данном контексте термин "надежный" захват относится к штучному товару, защищенному от перемещений в разгрузочном устройстве или от выпадения из захватного устройства.
В соответствии с изобретением устройство указанного выше типа характеризуется тем, что устройство обнаружения содержит источник света, которое расположено над несущей поверхностью и генерирует по меньшей мере один световой луч, падающий на несущую поверхность исключительно перпендикулярно, при этом по меньшей мере один световой луч или покрывает всю несущую определяемую поверхность, или двигается таким образом, что последовательно проходит по всей определяемой несущей поверхности, и при этом приемное устройство выполнено таким образом, что пропускает свет от источника света, проходящий через несущую поверхность, и одновременно рассеивает или отклоняет этот свет от источника света в каждой точке несущей поверхности, так что по меньшей мере часть пропущенного света направлена на устройство записи изображений. Например, приемное устройство содержит материал, пропускающий и одновременно диффузионно рассеивающий свет от источника света под несущей поверхностью. В данном контексте "перпендикулярно" падающий световой луч также относится к падению, в ходе которого направление падения отклоняется от перпендикуляра к несущей поверхности на небольшой допустимый угол, например в несколько градусов, что имеет место, в частности, в краевых областях светового луча с очень низкой расходимостью.
Основная идея изобретения заключается в сканировании несущей поверхности посредством одного или нескольких световых лучей, падающих перпендикулярно на область поверхности несущей поверхности и исходящий из источника света, протяженность которого от несущей поверхности больше наибольшей предполагаемой высоты штучного товара, находящегося на несущей поверхности, так что может быть выполнена проекция профиля соответствующего штучного товара. Такая конструкция источника света надежно предотвращает затенение небольших зазоров между расположенными рядом штучными товарами, находящимися на несущей поверхности, и обеспечивает не только определение профиля прямоугольных штучных товаров, но также профиля цилиндрических штучных товаров таких как, например, жестяные банки или бутылки, находящихся на несущей поверхности своей изогнутой областью поверхности.
Согласно предпочтительному варианту осуществления устройства в соответствии с настоящим изобретением приемное устройство содержит плоскую пластину, верхняя сторона которой образует несущую поверхность. В этом случае предполагается, что пластина изначально (в нормальном положении) расположена не горизонтально, а под углом, т.е. наклонена вниз от транспортировочного устройства, так что штучные товары, ударяющиеся о несущую поверхность, изначально скользят или скатываются вниз по наклонной плоскости. Исполнительный механизм, соединенный с устройством управления, выполнен таким образом, что он может быстро перемещать пластину в горизонтальное положение. Как только датчик обнаруживает удар штучного товара о несущую поверхность и подает сигнал об этом ударе на устройство управления, при этом устройство управления инициирует движение исполнительного механизма, так что несущая поверхность перемещается в горизонтальное положение, и движение скольжения штучного товара замедляется. Несущая поверхность снова возвращается в наклоненное нормальное положение после снятия штучного товара с несущей поверхности.
Источник света, расположенный над несущей поверхностью, предпочтительно генерирует несколько световых лучей, падающих на несущую поверхность исключительно перпендикулярно, при этом расположенные рядом световые лучи расположены на расстоянии друг от друга более чем на максимальное расстояние, которое соответствует требуемому разрешению. Таким образом ускоряется сканирование (или растровое сканирование) несущей поверхности.
Согласно предпочтительному усовершенствованию этого варианта осуществления устройства в соответствии с изобретением предложен подвижный источник света, причем световые лучи экспонируют полосу, которая проходит над несущей поверхностью в первом направлении, и при этом устройство управления управляет подвижным источником света таким образом, что экспонируемая полоса движется над несущей поверхностью во втором направлении, проходящем перпендикулярно первому направлению. В данном контексте "перпендикулярный" включает допустимое угловое смещение в несколько градусов от прямого угла. Предпочтительное устройство обеспечивает относительно простую линейную конструкцию источника света, где близко расположенные световые лучи экспонируют полосу на несущей поверхности. Затем источник света перемещают над несущей поверхностью в продольном направлении, аналогично сканеру. В данном контексте движение источника света включает движение самих светоизлучающих компонентов, а также движение механизма отклонения луча (например, отражателя). Световые лучи, формирующие полосу, предпочтительно падают одновременно на несущую поверхность параллельным образом; однако также предусмотрено, что световые лучи движутся вдоль полосы на большой скорости, при этом скорость сканирования значительно выше скорости, с которой движется экспонируемая полоса во втором направлении.
В контексте настоящего изобретения любые упоминания пластины, на которой находится несущая поверхность, пропускающая и одновременно диффузионно рассеивающая свет от источника света, относятся по меньшей мере к значительной доле светового излучения, пропускаемого через пластину, и значительная доля этого пропущенного излучения - диффузионно рассеянное. В отношении работы устройства в соответствии с изобретением, не имеет значения, является ли часть света от источника света отраженной несущей поверхностью или поглощенной пластиной. Также второстепенное значение имеет то, было ли диффузионное рассеивание выполнено полностью, или основная доля света рассеяна в меньшей степени.
Согласно предпочтительному варианту осуществления устройства в соответствии с изобретением предлагается, что устройство записи изображений осуществляет запись во время движения экспонируемой полосы ряда изображений обратной стороны несущей поверхности, на основе которых получают отображение несущей поверхности, при этом информацию о положении и ориентации штучных товаров, требуемую для активации разгрузочного устройства, получают из указанного отображения, и при этом временной интервал между изображениями соответствует периоду времени, за который экспонируемая полоса перемещается на расстояние, которое приблизительно соответствует ширине полосы. Таким образом, изображение несущей поверхности записывается в каждом положении экспонируемой полосы, в котором полоса соответственно смещается на ее ширину. Эти изображения монтируют в общее изображение посредством соответствующего алгоритма. Часть обработки можно уже осуществлять в устройстве записи изображений. Такой монтаж ряда изображений также можно осуществлять, если источник света генерирует не экспонируемую полосу, а отдельные точки. В таком случае необходимо монтировать соответственно большее количество изображений.
Также альтернативно предусмотрено, что устройство записи изображений записывает во время движения экспонируемой полосы серию от 20 до нескольких сотен практически одномерных линейно сканированных изображений, которые соответственно проходят в первом направлении, при этом отображение несущей поверхности получают из указанного линейно сканированного изображения, и информацию о положении и ориентации штучных товаров, требуемую для активации разгрузочного устройства, получают из указанного отображения. Согласно одному такому альтернативному варианту осуществления, например, 20-50 линейно сканированных изображений записывают во время движения экспонируемой полосы во втором направлении. Устройство управления монтирует эти линейно сканированные изображения в отображение несущей поверхности, на основании которого можно программно-управляемым способом получить информацию о положении и ориентации соответствующих штучных товаров, находящихся на несущей поверхности. Хотя посредством такого подхода сокращаются данные об изображении, которые необходимо обработать, одновременно поддерживая требуемую точность при определении информации, характеризующей положение и ориентацию, он предусматривает согласование управления движением источника света с процессом монтирования изображений полосы и, следовательно, измерение положения экспонируемой полосы, а также усиленное управление.
Предпочтительный вариант осуществления устройства разделения в соответствии с изобретением характеризуется тем, что источник света является источником инфракрасного излучения, и пластина содержит пластик, который пропускает и одновременно диффузионно рассеивает инфракрасное излучение.
Источник инфракрасного излучения предпочтительно содержит несколько инфракрасных светодиодов, которые расположены рядом на подложке вдоль первого направления и находятся на равном расстоянии друг от друга, причем каждый инфракрасный светодиод испускает световой луч с углом апертуры менее чем 5°. Предпочтительно применять инфракрасные светодиоды с углом апертуры от 1 до 2°. Подложка состоит, например, из печатной платы, на которой установлены светодиоды. Расстояния между светодиодами соответствуют максимальному расстоянию между световыми лучами, определяемому разрешением. Это максимальное расстояние составляет, например, от 3 до 6 мм.
Согласно предпочтительному варианту осуществления устройства в соответствии с настоящим изобретением инфракрасные светодиоды испускают световые лучи вертикально вниз, и подложка является подвижной во втором направлении. Согласно этому варианту осуществления сами источники светового излучения подвижны во втором направлении. Согласно альтернативному варианту осуществления, например, инфракрасные светодиоды испускают световые лучи горизонтально, а зеркало, расположенное параллельно неподвижной подложке светодиодов, отклоняет горизонтальные световые лучи вертикально вниз и выполнено таким образом, что может перемещаться во втором направлении.
Согласно предпочтительному варианту осуществления устройства в соответствии с настоящим изобретением первое направление проходит поперечно к направлению транспортировки транспортировочного устройства, с которого штучные товары попадают на несущую поверхность. Предпочтительно изначально располагать полосу, образованную вертикальными световыми лучами, непосредственно рядом с концом транспортировочного устройства. После того как штучный товар или штучные товары были транспортированы на несущую поверхность, экспонируемую полосу перемещают над штучными товарами во втором направлении.
Согласно усовершенствованному варианту устройства в соответствии с изобретением устройство управления управляет подвижным источником света таким образом, что экспонируемая полоса непрерывно двигается по всей несущей поверхности за один проход. Устройство записи изображений выполняет запись серии изображений в течение одинаковых временных интервалов в ходе этого непрерывного движения полосы. Записанные изображения последовательно монтируют для отображения несущей поверхности.
Предпочтительный вариант осуществления устройства разделения в соответствии с изобретением характеризуется тем, что разгрузочное устройство установлено и направляется по линейной направляющей, которая установлена над несущей поверхностью и проходит во втором направлении, и при этом источник света установлен и направляется по той же линейной направляющей. Таким образом, упрощается конструктивное исполнение устройства разделения, поскольку для направления разгрузочного устройства, равно как и источника света, можно применять одну линейную направляющую. Преимущество такого варианта осуществления заключается в том, что источник света, обычно, изначально направляют по несущей поверхности для определения положения и ориентации штучных товаров, находящихся на ней, а затем возвращают в его исходное положение на краю несущей поверхности, так что линейную направляющую по существу можно использовать для транспортировки разгрузочного устройства по всей ее длине. Также представляется возможным применять общий привод для разгрузочного устройства и источника света, причем разгрузочное устройство и источник света могут быть даже соединены друг с другом. Таким образом сокращают затраты на управление.
Преимущественные и/или предпочтительные усовершенствованные варианты изобретения описаны в зависимых пунктах формулы изобретения.
Далее изобретение описано более подробно со ссылкой на предпочтительный приведенный в качестве примера вариант осуществления, который проиллюстрирован на графических материалах. На графических материалах:
на фиг.1 схематически показана конструкция устройства разделения в соответствии с изобретением; и
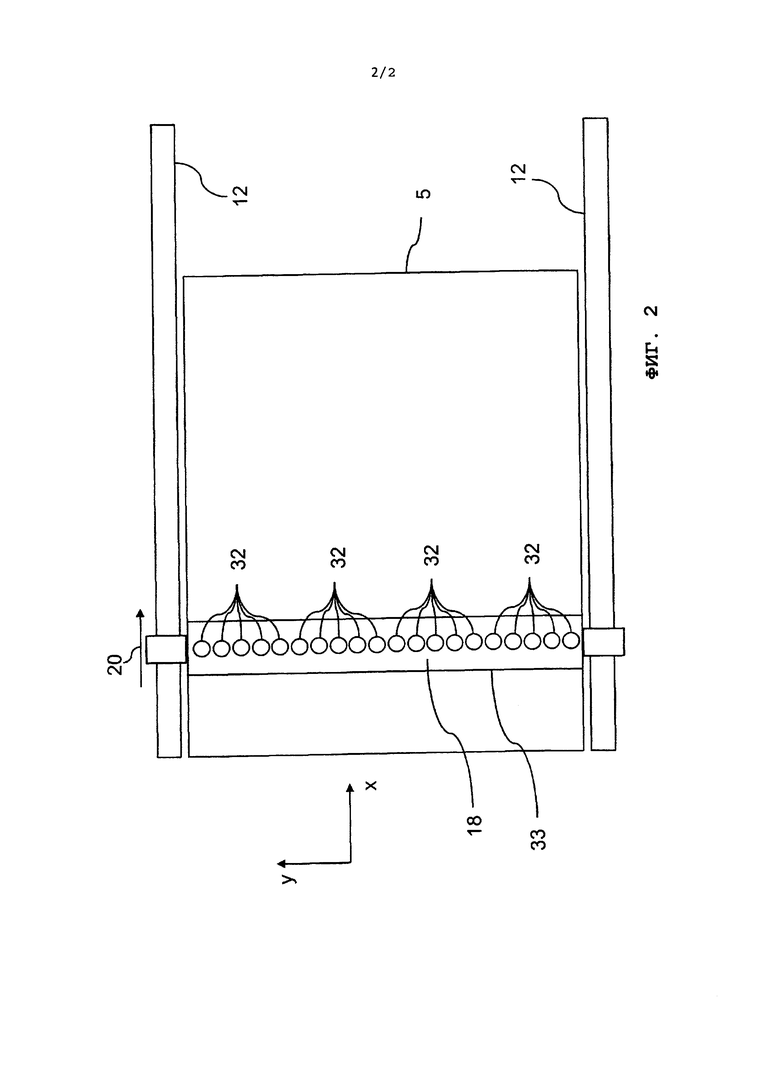
на фиг.2 схематически показан вид сверху источника света, направляемого по линейным направляющим, и несущей поверхности, расположенной под источником света.
На фиг.1 схематически показано устройство 1 разделения в соответствии с изобретением. Устройство 1 разделения состоит из четырех основных компонентов, а именно транспортировочного устройства 3 для транспортировки штучных товаров 2 из запаса 4 товаров на несущую поверхность 5, управляющего компьютера 6, устройства обнаружения, соединенного с управляющим компьютером 6 и предназначенного для определения положения и ориентации (в том числе проецированного профиля) штучных товаров 2, находящихся на несущей поверхности 5, и разгрузочного устройства, соединенного с управляющим компьютером 6 и предназначенного для снятия штучного товара с несущей поверхности 5 для дальнейшей транспортировки в складское помещение. Устройство обнаружения для определения положения и ориентации штучных товаров 2, находящихся на несущей поверхности 5, содержит устройство 23 записи изображений, расположенное под несущей поверхностью 5, и источник 18 инфракрасного излучения, расположенный над несущей поверхностью 5, причем источник 18 инфракрасного излучения предназначен для экспонирования несущей поверхности 5, и устройство 23 записи изображений предназначено для записи изображений, полученных в ходе экспонирования. Эти компоненты и их функции описаны более подробно ниже.
Большое количество штучных товаров с различными формами и размерами, в частности фармацевтические упаковки 2, изначально являются частью запаса 4 товаров, который может храниться, например, в открытом контейнере или ящике. Фармацевтические упаковки 2 транспортируют в проходящем под углом вверх направлении из этого запаса 4 товаров посредством ступенчатого конвейера 3. Ступенчатый конвейер 3 содержит опорную пластину 29 с верхним краем 30. Над опорной пластиной 29 ступень с транспортирующим краем перемещается снизу вверх параллельно опорной пластине 29, причем это движение ступенчатого конвейера 3 управляется управляющим компьютером 6. На фиг.1 показана соединительная линия 28 между управляющим компьютером 6 и управляющим приводом ступенчатого конвейера 3, который приводит в действие ступень, которую необходимо переместить вверх. Движение ступени указано тонкой стрелкой. Транспортирующий край ступени толкает вверх фармацевтическую упаковку 2, находящуюся на опорной пластине 29, как показано стрелкой 31. Толкание фармацевтической упаковки 2 длится до тех пор, пока она не пройдет над верхним краем 30, затем она сбрасывается или падает на несущую поверхность 5. Этот удар фармацевтической упаковки 2 о несущую поверхность 5 обнаруживается датчиком 7, который может состоять, например, из светового барьера, расположенного параллельно верхнему краю 30 ступенчатого конвейера 3. Однако также предусмотрено применение других конфигураций датчиков, например тактильных датчиков. В таком случае ширину ступенчатого конвейера 3 необходимо выбирать таким образом, чтобы она была несколько меньше ширины несущей поверхности 5. Более того, ширину подстраивают под предполагаемый размерный диапазон фармацевтических упаковок 2. В ходе каждого смещения вверх ступени от запаса товаров в направлении верхнего края 30 транспортирующий край ступени толкает одну или несколько фармацевтических упаковок над верхним краем 30 опорной пластины 29.
Несущая поверхность 5 предпочтительно образована верхней стороной плоской пластины 27. В нормальном положении (которое не показано на фиг.1) пластина 27 изначально расположена под углом, т.е. наклонена вниз от транспортировочного устройства 3, так что штучные товары 2, ударяющиеся о несущую поверхность 5, изначально скользят или скатываются вниз по наклонной плоскости. Исполнительный механизм, соединенный с устройством 6 управления, выполнен таким образом, что он может быстро перемещать пластину 27 в горизонтальное положение. Как только датчик 7 обнаруживает (предстоящий) удар штучного товара 2 о несущую поверхность 5 и подает сигнал об этом ударе на устройство 6 управления, устройство 6 управления инициирует движение исполнительного механизма, так что несущая поверхность 5 перемещается в горизонтальное положение (показанное на фиг.1), и движение скольжения штучного товара 2 замедляется. Несущая поверхность 5 снова возвращается в наклоненное нормальное положение после снятия штучного товара 2 с несущей поверхности.
После того как датчик 7 обнаружил появление фармацевтической упаковки 2 или одновременное появление нескольких фармацевтических упаковок 2 на несущей поверхности 5 пластины 27, управляющий компьютер 6 подтверждает, что ступенчатый конвейер 3 не транспортирует какие-либо дополнительные фармацевтические упаковки 2, т.е. транспортирующая ступень убрана вниз. Кроме того, управляющий компьютер 6 активирует устройство обнаружения для определения положения и ориентации фармацевтических упаковок 2, находящихся на несущей поверхности 5. С этой целью управляющий компьютером 6 активирует привод 19 источника 18 инфракрасного излучения через линию 21, причем указанный привод обеспечивает движение источника 18 инфракрасного излучения в направлении стрелки 20, т.е. в направлении х. Движение источника 18 инфракрасного излучения предпочтительно начинается на краю несущей поверхности 5, расположенной рядом со ступенчатым конвейером 3, а затем становится непрерывным по всей несущей поверхности 5 до тех пор, пока он не остановится на противоположном крае. Источник 18 инфракрасного излучения со своим приводом 19 установлен и направлен по линейной направляющей 12.
Источник 18 инфракрасного излучения испускает несколько световых лучей 22, расположенных друг за другом в направлении у на несущей поверхности 5, так что эти световые лучи 22 экспонируют узкую полосу 26, проходящую в направлении у. Например, источник 18 инфракрасного излучения, содержащий ряд инфракрасных светодиодов 32 показанного на фиг.2 типа, применяют для генерирования нескольких световых лучей 22. На фиг.2 схематически показан вид сверху устройств обнаружения устройства 1 разделения в соответствии с изобретением. На фиг.2 показана несущая поверхность 5, над которой расположены две линейные направляющие 12, причем источник 18 инфракрасного излучения закреплен и направляется по указанным линейным направляющим. В показанном на фиг.2 примере источник 18 инфракрасного излучения содержит двадцать инфракрасных светодиодов 32, расположенных в ряд вдоль направления у. Управляющий компьютер 6 активирует привод 19 источника 18 инфракрасного излучения таким образом, что источник 18 инфракрасного излучения движется по несущей поверхности 15 в направлении х приблизительно с постоянной скоростью, причем управляющий компьютер 6 также подтверждает по соединительным линиям 24, что устройство записи изображений 23 выполняет запись заданного количества изображений приблизительно в течение одинаковых временных интервалов. Например, во время движения источника инфракрасного излучения выполняют запись от 20 до 400 изображений, предпочтительно от 40 до 80 изображений. Изображения обратной стороны несущей поверхности, записанные во время движения экспонируемой полосы, монтируют в отображение несущей поверхности, на основании которого получают информацию о положении и ориентации штучных товаров, требуемую для активации разгрузочного устройства, причем временной интервал между изображениями соответствует периоду времени, за который экспонируемая полоса проходит расстояние, которое соответствует требуемому разрешению изображения. Полное изображение несущей поверхности получают в каждом положении экспонируемой полосы, в котором полоса соответственно смещается на требуемое разрешение. Эти изображения монтируют в общее изображение посредством соответствующего алгоритма. Часть обработки можно уже осуществлять в устройстве 23 записи изображений.
Несущая поверхность 5 состоит из верхней стороны пластины 27 из пластика, которая является прозрачной для испускаемого инфракрасного излучения и диффузионно рассеивает это инфракрасное излучение, когда оно проходит через пластину из пластика. Благодаря такому диффузионному рассеиванию инфракрасное излучение достигает фотоаппарата 23, независимо от текущего положения экспонируемой полосы 26 на несущей поверхности 5. Если часть несущей поверхности 5 покрыта фармацевтической упаковкой 2, находящейся на ней, в момент, когда экспонируемая полоса движется по несущей поверхности, изображения, записываемые фотоаппаратом 23 при движении экспонируемой полосы над фармацевтической упаковкой 2, содержат неэкспонируемые области в областях по y-координате, покрытые фармацевтической упаковкой 2. Управляющий компьютер 6 вычисляет координаты положения фармацевтических упаковок 2, находящихся на несущей поверхности, на основании серии изображений, выполненных фотоаппаратом 23, на которых неэкспонируемые области соответственно записаны в момент движения полосы над фармацевтической упаковкой 2.
После того как управляющий компьютер 6 вычислит положение и ориентацию фармацевтических упаковок 2, находящихся на несущей поверхности 5, на основании сигналов изображений, поступающих от фотоаппарата 23, он может использовать эти координаты для активации разгрузочного устройства, которое соответственно подбирает одну отдельную упаковку 3 с несущей поверхности 5 и помещает эту упаковку на конвейерную ленту 16, причем конвейерная лента 16 доставляет фармацевтическую упаковку 2 в диапазон захвата транспортно-складского блока автоматизированного высотного складского помещения (не показанного на фиг.1). С этой целью управляющий компьютер 6 соединен с разгрузочным устройством 8-11 через линию 14. Более того, он соединен с приводом 15 конвейерной ленты 16 через линию 17.
Разгрузочное устройство закреплено и направляется посредством линейной направляющей 12 и содержит привод 10, способный перемещать разгрузочное устройство в направлении стрелки 13. В приведенном в качестве примера варианте осуществления, показанном на фиг.1, разгрузочное устройство содержит всасывающую головку 9, всасывающее действие которой обеспечивает присоединение верхней стороны фармацевтической упаковки 2, находящейся на несущей поверхности 5, к разгрузочному устройству, так что фармацевтическая упаковка 2 может быть поднята над несущей поверхностью 5. Всасывающей головкой 9 управляет привод, расположенный в корпусе 8. Разгрузочное устройство содержит второй привод 11, направляемый по вертикальной рейке, для приведения в движение всасывающей головки 9 в вертикальном направлении. Кроме того, предоставлен дополнительный привод для приведения в движение всасывающей головки 9 в направлении у. Следовательно, всасывающая головка 9 может быть перемещена во всех трех направлениях в пространстве. На основании заданных координат положения управляющий компьютер 6 подтверждает, что всасывающая головка 9 присоединяется к заданному местоположению на верхней стороне фармацевтической упаковки 2, в котором фармацевтическая упаковка 2 может быть надежно захвачена. Фармацевтическую упаковку 2, присоединенную посредством силы всасывания, затем поднимают над несущей поверхностью 5 и помещают на конвейерную ленту 16.
Другое преимущество варианта осуществления устройства 1 разделения в соответствии с изобретением, показанного на фиг.1, заключается в том, что линейная направляющая 12 перемещает подвижный источник 18 инфракрасного излучения посредством привода 19, а также разгрузочное устройство. В начале цикла разделения источник 18 инфракрасного излучения расположен в положении на краю, показанном слева на фиг.1, тогда как разгрузочное устройство расположено снаружи несущей поверхности 5 на правом краю линейной направляющей 12, например над конвейерной лентой 16. Согласно традиционной последовательности операций несущую поверхность 5 изначально сканируют посредством источника 18 инфракрасного излучения, причем источник 18 инфракрасного излучения можно перемещать по линейной направляющей 12, не сталкиваясь с разгрузочным устройством. После процесса сканирования источник 18 инфракрасного излучения снова помещают на левый край линейной направляющей 12, так что вся линейная направляющая 12 доступна для передвижения разгрузочного устройства.

Устройство (1) разделения штучных товаров (2) содержит транспортировочное устройство (3) для транспортировки товаров на несущую поверхность (5) приемного устройства (27), устройство (6) управления транспортировочным устройством, датчик (7) обнаружения удара о несущую поверхность товаров, устройство обнаружения, соединенное с устройством управления, для определения положения и ориентации товаров и разгрузочное устройство (8-11) для снятия товара с несущей поверхности. Устройство обнаружения содержит источник (18, 19) света, расположенный над несущей поверхностью. Источник света создает один или несколько световых пучков (22), которые падают на несущую поверхность исключительно перпендикулярно. Световые пучки перемещаются таким образом, что световые пучки последовательно проходят по всей определяемой несущей поверхности. Приемное устройство пропускает свет от источника света, проходящего через несущую поверхность, и рассеивает свет в каждом местоположении несущей поверхности таким образом, что часть света направляется в устройство записи изображений. Улучшается определение штучных товаров. 12 з.п. ф-лы, 2 ил.
1. Устройство (1) для разделения штучных товаров (2), предназначенных для хранения в автоматизированном складском помещении, содержащее
транспортировочное устройство (3) для транспортировки штучных товаров (2) из запаса (4) товаров на несущую поверхность (5) приемного устройства (27),
устройство (6) управления для управления транспортировочным устройством (3),
датчик (7), соединенный с устройством (6) управления и определяющий предстоящий или фактический удар штучных товаров (2) о несущую поверхность (5), причем устройство (6) управления прерывает транспортирование дополнительных штучных товаров (2) на несущей поверхности (5), как только удар штучного товара или нескольких штучных товаров (2) был обнаружен,
устройство обнаружения, соединенное с устройством (6) управления и предназначенное для определения положения и ориентации штучных товаров (2), находящихся на несущей поверхности (5), причем устройство обнаружения содержит устройство (23) записи изображений, которое выполняет запись изображений обработанной стороны несущей поверхности (5) приемного устройства (27), и устройство (6) управления получает информацию о положении и ориентации штучных товаров (2), находящихся на несущей поверхности на основании указанного изображения, и
разгрузочное устройство (8-11), соединенное с устройством (6) управления и предназначенное для снятия штучного товара (2) с несущей поверхности (5) для дальнейшей транспортировки в складское помещение, причем устройство (6) управления целенаправленно управляет разгрузочным устройством (8-11) в соответствии с информацией о положении и ориентации, так что оно захватывает отдельный штучный товар (2),
где устройство обнаружения содержит источник (18, 19) света, расположенный над несущей поверхностью (5) и генерирующий по меньшей мере один световой луч (22), падающий на несущую поверхность (5) исключительно перпендикулярно, причем по меньшей мере один световой луч (22) перемещают таким образом, что он проходит по всей определяемой несущей поверхности (5), и
где приемное устройство (27) выполнено таким образом, что пропускает свет от источника (18, 19) света, проходящего через несущую поверхность (5), и одновременно рассеивает или отклоняет этот свет от источника света в каждой точке несущей поверхности (5), так что по меньшей мере часть пропущенного света направлена на устройство (23) записи изображений.
2. Устройство (1) разделения по п. 1, отличающееся тем, что материал приемного устройства (27) под несущей поверхностью (5) пропускает и одновременно диффузионно рассеивает свет от источника (18, 19) света.
3. Устройство (1) разделения по п. 1, отличающееся тем, что приемное устройство содержит плоскую пластину (27), верхняя сторона которой образует несущую поверхность (5).
4. Устройство (1) разделения по п. 1, отличающееся тем, что источник (18, 19) света, расположенный над несущей поверхностью (5), генерирует несколько световых лучей (22), падающих на несущую поверхность (5) исключительно перпендикулярно, причем расположенные рядом световые лучи (22) расположены на расстоянии друг от друга не более чем максимальное расстояние, которое соответствует требуемому разрешению.
5. Устройство (1) разделения по п. 4, отличающееся тем, что источник (18, 19) света является подвижным, причем световые лучи (22) экспонируют полосу (26), которая проходит по несущей поверхности (5) в первом направлении (у), и при этом устройство (6) управления управляет подвижным источником (18, 19) света таким образом, что экспонируемая полоса (26) движется по несущей поверхности (5) во втором направлении (х), проходящем перпендикулярно первому направлению (у).
6. Устройство (1) разделения по п. 5, отличающееся тем, что устройство (23) записи изображений во время движения экспонируемой полосы (26) выполняет запись серии изображений обратной стороны несущей поверхности (5), на основании которых получают отображение несущей поверхности (5), причем информацию о положении и ориентации штучных товаров (2), требуемую для активации разгрузочного устройства (9-11), получают из указанного отображения, и при этом временной интервал между изображениями соответствует периоду времени, за который экспонируемая полоса (26) перемещается на расстояние, которое приблизительно соответствует ширине полосы.
7. Устройство (1) разделения по п. 5, отличающееся тем, что источник (18, 19) света является источником инфракрасного излучения и пластина (27) содержит пластик, который пропускает и одновременно диффузионно рассеивает инфракрасное излучение.
8. Устройство (1) разделения по п. 4, отличающееся тем, что источник (18, 19) света содержит несколько светодиодов (32), которые расположены рядом на подложке (33) вдоль первого направления (у) и находятся на равном расстоянии друг от друга, причем каждый светодиод (32) испускает световой луч с углом апертуры менее чем 5°.
9. Устройство (1) разделения по п. 8, отличающееся тем, что светодиоды (32) испускают световые лучи вертикально вниз и подложка (33) является подвижной во втором направлении (х).
10. Устройство (1) разделения по п. 8, отличающееся тем, что светодиоды испускают горизонтально световые лучи, а зеркало, расположенное параллельно неподвижной подложке светодиодов, отклоняет горизонтальные световые лучи вертикально вниз и расположено таким образом, что может перемещаться во втором направлении (х).
11. Устройство (1) разделения по п. 5, отличающееся тем, что первое направление (у) проходит поперечно к направлению транспортировки транспортировочного устройства (3), с которого штучные товары (2) попадают на несущую поверхность (5).
12. Устройство (1) разделения по п. 5, отличающееся тем, что устройство (6) управления управляет подвижным источником (18, 19) света таким образом, что экспонируемая полоса (26) непрерывно перемещается по всей несущей поверхности (5) за один проход.
13. Устройство (1) разделения по п. 5, отличающееся тем, что разгрузочное устройство (9-11) установлено и направляется по линейной направляющей (12), которая установлена над несущей поверхностью (5) и проходит во втором направлении (х), и при этом источник (18, 19) света установлен и направляется по той же линейной направляющей (12).
| DE 102004012133 A1, 04.05.2005 | |||
| US 6471044 B1, 29.10.2002 | |||
| US 2008046199 A1, 21.02.2008 | |||
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ПЕРЕДВИЖЕНИЯ ПРЕДМЕТОВ С СИММЕТРИЕЙ ВРАЩЕНИЯ, ПРИМЕНЯЕМОЕ ДЛЯ ВИЗУАЛЬНОГО ОСМОТРА И ПРОВЕРКИ | 2001 |
|
RU2285652C2 |

