ОБЛАСТЬ ИЗОБРЕТЕНИЯ
В одном из аспектов изобретение относится к системе, которая содержит множество модулей обнаружения объекта. Система может представлять собой, например, систему освещения, которая содержит соответствующие осветительные блоки, которые снабжены соответствующими модулями обнаружения объекта. Модули обнаружения объекта могут быть в форме, например, радиолокационных детекторов. Другие аспекты изобретения относятся к способу работы системы, который содержит множество модулей обнаружения объекта, и компьютерному программному продукту, который позволяет процессору осуществлять такой способ.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Детектор объекта может обнаруживать объект по излучению в конкретном диапазоне длин волн. Например, детектор объекта может создавать передаваемый сигнал в радиолокационном диапазоне длин волн. Передаваемый сигнал покрывает, как бы то ни было, область обнаружения вокруг детектора объекта. Объект, который присутствует в этой области обнаружения, будет причиной отражения передаваемого сигнала в радиолокационном диапазоне длин волн. Модуль обнаружения объекта затем может обнаруживать объект по этому отражению, которое исходит от объекта. В качестве другого примера, детектор объекта может обнаруживать относительно теплый объект, такой как, например, человек, по излучению, которое исходит от объекта в инфракрасном диапазоне длин волн.
Система освещения может содержать соответствующие осветительные блоки, которые снабжены соответствующими детекторами объекта. В случае обнаружения объекта детектором объекта осветительного блока, детектор объекта может управлять осветительным блоком, чтобы он был в активном режиме. Детектор объекта также может управлять соседним осветительным блоком, чтобы он был в активном режиме, например, если объект двигается в направлении этого соседнего осветительного блока. Наоборот, в случае, если детектор объекта конкретного осветительного блока не обнаруживает какой-либо объект, и соседние детекторы объекта соседних осветительных блоков также не обнаруживают какой-либо объект, конкретный осветительный блок может быть в режиме ожидания. Это экономит энергию и снижает так называемое световое загрязнение.
В системе освещения, как описано выше, соответствующие осветительные блоки дополнительно можно снабжать соответствующими коммуникационными модулями. Соответственно, осветительный блок может передавать сообщение другому осветительному блоку или системному контроллеру. Например, сообщение может содержать идентификационные данные, данные, касающиеся обнаружения объекта, или данные, касающиеся отказа в осветительном блоке. Соответствующие коммуникационные модули дополнительно позволяют системному контроллеру посылать данные, такие как команда, на конкретный осветительный блок или конкретную группу осветительных блоков.
В патентной заявке UK, опубликованной под номером GB 2444734, описана система уличного освещения, которая обеспечивает освещение для объектов, перемещающихся вдоль дороги. Присутствие объектов обнаруживают посредством одного или нескольких датчиков, которые могут быть в форме радиолокаторов обнаружения движения.
В патентной публикации GB 2470926 A описана система освещения для улицы или дороги. В группе ламп присутствует по меньшей мере одна лампа, которая содержит воспринимающее средство для восприятия присутствия мишени. При использовании, когда воспринимается присутствие мишени, воспринимающее средство выводит сигнал на коммуникационное средство, связанное с той же лампой. Затем коммуникационное средство передает сигнал, заставляющий лампы в группе освещать.
В патентной публикации US 2009/0033545 A1 описана система для мониторинга топологических изменений в определяемой области. Сетка датчиков расположена в некоторой области, с известными расстояниями между ними. Главный компьютер осуществляет индивидуальную адресацию каждого датчика, чтобы предписывать этому датчику находиться в режиме запросчика или режиме ответчика. Когда датчик находится в режиме запросчика, он измеряет расстояние до соседнего датчика, используя радиолокационные (непрерывная разность фаз волн) измерения. Когда датчик находится в режиме ответчика, он принимает, задерживает и возвращает сигнал, принимаемый от соседнего датчика.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Существует необходимость в решении, которое допускает относительно надежную автоматизированную установку и обслуживание системы, которая содержит множество модулей обнаружения объекта.
В соответствии с одним из аспектов изобретения, система содержит множество модулей обнаружения объекта. Модуль обнаружения объекта может работать в стандартном режиме, в котором модуль обнаружения объекта может обнаруживать объект по излучению в конкретном диапазоне длин волн и осуществлять управление в зависимости от обнаружения объекта. Система выполнена с возможностью управлять модулем обнаружения объекта, чтобы он работал в зондирующем основном режиме. В этом режиме модуль обнаружения объекта создает зондирующее излучение в конкретном диапазоне длин волн. Другим модулем обнаружения объекта управляют, чтобы он работал в зондирующем подчиненном режиме. В этом режиме другой модуль обнаружения объекта предоставляет подтверждение в ответ на прием зондирующего излучения.
Такая схема зондирования обеспечивает верификацию правильного функционирования соседнего модуля обнаружения объекта в дополнение к обнаружению или подтверждению того, что соседний модуль обнаружения объекта присутствует. То есть схема зондирования служит по меньшей мере двум различным целям. Например схему зондирования можно использовать для определения топологии системы освещения и для обнаружения отказа. Топология, которую определяют посредством применения этой схемы зондирования, отражает только те модули обнаружения объекта, которые способны обнаруживать объекты по принимаемому излучению. Какой-либо не функционирующий модуль обнаружения объекта, который не обладает этой способностью, автоматически будет пропущен в этой топологии.
Реализация изобретения предпочтительно содержит один или несколько из следующих дополнительных признаков, которые описаны в отдельных параграфах. Каждый из этих дополнительных признаков вносит вклад в достижение относительно надежной автоматизированной установки и обслуживания.
Модуль обнаружения объекта, который работает в зондирующем задающем режиме, предпочтительно выполнен с возможностью концентрировать зондирующее излучение по меньшей мере в одном из множества различных направлений. Система предпочтительно содержит управляющий объект, выполненный так, чтобы связывать направление, в котором сосредотачивают зондирующее излучение, с подтверждением от другого модуля обнаружения объекта, который работает в зондирующем подчиненном режиме. Эти дополнительные признаки делают возможным получение относительно подробной информации для установки и обслуживания системы.
Система предпочтительно работает для того, чтобы управлять модулем обнаружения объекта, который работает в зондирующем задающем режиме, и другим модулем обнаружения объекта, который работает в зондирующем подчиненном режиме для осуществления начальной фазы. В этой начальной фазе модуль обнаружения объекта, который работает в зондирующем подчиненном режиме, создает указывающее на присутствие излучение. Модуль обнаружения объекта, который работает в зондирующем задающем режиме, последовательно концентрирует чувствительность восприятия в соответствующих различных направлениях, чтобы обнаруживать направление, в котором указывающее на присутствие излучение приходит в этот модуль обнаружения объекта. Тогда модуль обнаружения объекта, который работает в зондирующем задающем режиме, предпочтительно выполнен так, чтобы концентрировать зондирующее излучение в этом направлении. Эти дополнительные признаки вносят вклад в автоматическое и надежное обнаружения модуля обнаружения объекта, вновь введенного в систему. Вдобавок, эти признаки делают возможными эффективные сеансы зондирования.
Модуль обнаружения объекта, который работает в зондирующем задающем режиме, предпочтительно выполнен с возможностью широковещательной передачи сигнала, который управляет другими модулями обнаружения объекта, которые принимают этот сигнал, чтобы работать в зондирующем подчиненном режиме. Эти дополнительные признаки дополнительно вносят вклад в автоматическое и надежное обнаружение модуля обнаружения объекта, вновь введенного в систему, и дополнительно вносят вклад в эффективные сеансы зондирования.
Система предпочтительно содержит управляющий объект, выполненный так, чтобы регистрировать модуль обнаружения объекта, который работает в зондирующем задающем режиме, и другой модуль обнаружения объекта, который работает в зондирующем подчиненном режиме, в качестве соседей друг друга, в случае предоставления подтверждения модулем обнаружения объекта, который работает в зондирующем подчиненном режиме. Эти дополнительные признаки вносят вклад в получение относительно подробной информации для установки и обслуживания системы.
Система предпочтительно содержит управляющий объект, выполненный так, чтобы регистрировать неисправность в случае, если модуль обнаружения объекта, который работает в зондирующем задающем режиме, и другой модуль обнаружения объекта, который работает в зондирующем подчиненном режиме, зарегистрированы в качестве соседей и модуль обнаружения объекта, который работает в зондирующем подчиненном режиме, не предоставил какого-либо подтверждения. Эти дополнительные признаки вносят вклад в автоматическое и надежное обнаружение неисправностей.
Система предпочтительно выполнена так, чтобы управлять модулем обнаружения объекта, чтобы он работал в зондирующем задающем режиме, и управлять другими модулями обнаружения объекта, чтобы они работали в зондирующем подчиненном режиме в течение регулярных интервалов времени. Эти дополнительные признаки вносят вклад в раннее обнаружение неисправностей.
Система выполнена так, чтобы управлять соответствующими из множества модулей обнаружения объекта, чтобы они работали в зондирующем задающем режиме в течение соответствующих интервалов времени, и управлять соответствующими другими из множества модулей обнаружения объекта, чтобы они работали в зондирующем подчиненном режиме. Эти дополнительные признаки вносят вклад в получение относительно подробной информации для установки и обслуживания системы.
Управляющий объект предпочтительно выполнен так, чтобы определять топологию множества модулей обнаружения объекта, основываясь на соответствующих подтверждениях, которые сообщены в течение соответствующих интервалов времени. Это вносит вклад в эффективную установку и обслуживание системы.
Соответствующие модули обнаружения объекта предпочтительно связаны с соответствующими коммуникационными модулями. Коммуникационный модуль, который связан с модулем обнаружения объекта, можно конфигурировать, чтобы передавать сообщение на соседний коммуникационный модуль, который связан с соседним модулем обнаружения объекта, пока соседний модуль обнаружения объекта не предоставит подтверждение в ответ на зондирующее излучение от модуля обнаружения объекта. Иначе, когда подтверждение не предоставлено, сообщение передают на другой соседний коммуникационный модуль, который связан с другим соседним модулем обнаружения объекта, который предоставляет подтверждение в ответ на зондирующее излучение модуля обнаружения объекта. Это вносит вклад в надежную связь внутри системы.
Соответствующие модули обнаружения объекта предпочтительно содержат соответствующие радиолокационные детекторы, за счет чего зондирующее излучение представлено в форме сигнала радара.
Соответствующие модули обнаружения объекта могут формировать часть соответствующих компоновок освещения.
С целью иллюстрации изобретения, а также дополнительных признаков, подробное описание конкретных вариантов осуществления предоставлено со ссылкой на чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 представлено схематичное изображение, которое иллюстрирует систему уличного освещения, содержащую множество воспринимающих и коммуникационных модулей.
На фиг. 2 представлена блок-схема, которая иллюстрирует воспринимающий и коммуникационный модуль.
На фиг. 3 представлена блок-схема последовательности операций, которая иллюстрирует сеанс зондирования в способе работы системы уличного освещения.
ПОДРОБНОЕ ОПИСАНИЕ
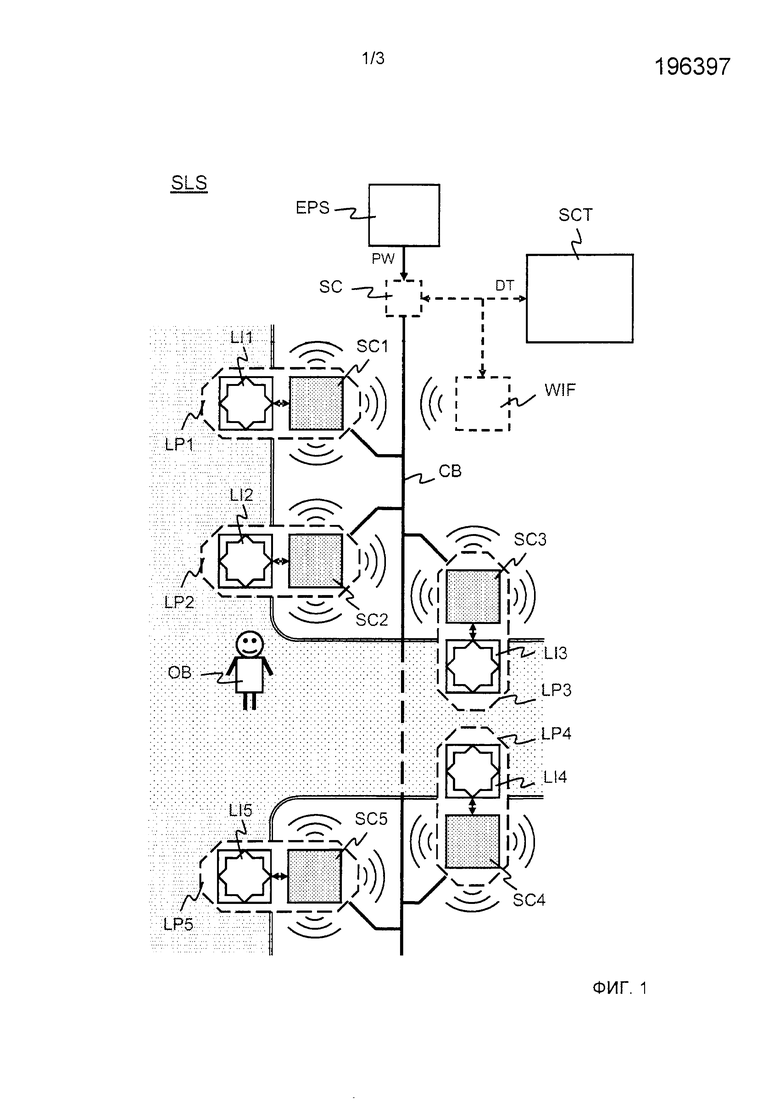
На фиг. 1 схематично проиллюстрирована система SLS уличного освещения. Система SLS уличного освещения содержит множество фонарных столбов LP1-LP5, которые расположены вдоль одной или нескольких улиц, по которым может перемещаться объект OB. Фонарный столб LP1 содержит осветительный блок LI1 и воспринимающий и коммуникационный блок SC1. Воспринимающий и коммуникационный блок SC1 предпочтительно интегрирован в осветительный блок LI1 фонарного столба LP1. Здесь восприятие и связь относительно защищены от агрессивных воздействий, в частности, вандализма. Это в равной мере применимо к другим фонарным столбам LP2-LP5, проиллюстрированным на фиг. 1, которые содержат соответствующие осветительные блоки LI2-LI5 и соответствующие воспринимающие и коммуникационные блоки SC2-SC5.
Система SLS уличного освещения дополнительно содержит источник EPS электрической энергии и системный контроллер SCT. Силовой распределительный кабель CB электрически связывает фонарные столбы LP1-LP5 с источником EPS электрической энергии. Интерфейс WIF беспроводной связи обеспечивает коммуникационное соединение фонарных столбов LP1-LP5 с системным контроллером SCT. В другом варианте системы SLS уличного освещения, силовой распределительный кабель CB обеспечивает коммуникационное соединение фонарных столбов LP1-LP5 с системным контроллером SCT посредством разделителя-сумматора SC, который проиллюстрирован посредством прерывистых линий.
Система SLS уличного освещения по существу работает следующим образом. Воспринимающий и коммуникационный блок, который может представлять собой какой-либо из воспринимающих и коммуникационных блоков SC1-SC5, проиллюстрированных на фиг. 1, может осуществлять связь с системным контроллером SCT и другими воспринимающими и коммуникационными блоками, или непосредственно или через системный контроллер SCT. Эту системную связь можно осуществлять проводным образом, например, через силовой распределительный кабель CB. В последнем случае, разделитель-сумматор SC может накладывать данные от системного контроллера SCT на сигнал PW электрической мощности, который предоставляет источник EPS электрической энергии. Наоборот, разделитель-сумматор SC может извлекать данные, которые воспринимающий и коммуникационный блок наложил на сигнал PW электрической мощности.
Системную связь можно осуществлять беспроводным образом, предпочтительно, скачками. Данные могут передаваться скачками от одного воспринимающего и коммуникационного блока на другой в цепи воспринимающих и коммуникационных блоков между посылающим объектом и принимающим объектом. Такая схема скачкообразной передачи является относительно энергоэффективной. Достаточно, чтобы воспринимающий и коммуникационный блок имел мощность передачи для беспроводной связи относительно малой дальности, которая достигает только соседних блоков.
Например допустим, что воспринимающий и коммуникационный блок SC4 фонарного столба LP4 должен послать сообщение на системный контроллер SCT. В этом случае воспринимающие и коммуникационные блоки SC4, SC3, SC2 и SC1 могут формировать цепь A, через которую сообщение можно передавать скачками. Воспринимающий и коммуникационный блок SC4 фонарного столба LP4 сначала посылает сообщение на воспринимающий и коммуникационный блок SC3 фонарного столба LP3. Затем воспринимающий и коммуникационный блок SC3 фонарного столба LP3 пропускает сообщение на воспринимающий и коммуникационный блок SC2 фонарного столба LP2. Воспринимающий и коммуникационный блок SC2 фонарного столба LP2 пропускает сообщение на воспринимающий и коммуникационный блок SC1 фонарного столба LP1. Наконец, воспринимающий и коммуникационный блок SC1 фонарного столба LP1 пропускает сообщение на интерфейс WIF беспроводной связи, который передает сообщение на системный контроллер SCT. Воспринимающие и коммуникационные блоки SC4, SC5, SC2 и SC1 могут формировать альтернативную цепь, которую можно использовать в случае отказа в воспринимающем и коммуникационном блоке SC3 фонарного столба LP3.
Воспринимающие и коммуникационные блоки SC1-SC5 фонарных столбов LP1-LP5 могут работать по отдельности в различных режимах: стандартный режим, зондирующий задающий режим и зондирующий подчиненный режим. Эти режимы индивидуально описаны более подробно далее в настоящем документе. В каждом из трех режимов воспринимающий и коммуникационный блок предпочтительно может осуществлять связь с системным контроллером SCT и воспринимающими и коммуникационными блоками других фонарных столбов, или непосредственно или через системный контроллер SCT.
В стандартном режиме воспринимающий и коммуникационный блок фонарного столба управляет осветительным блоком фонарного столба в зависимости от обнаружения объекта. Например, предположим, что воспринимающий и коммуникационный блок SC2 фонарного столба LP2 обнаруживает объект OB, который проиллюстрирован на фиг. 1. В этом случае воспринимающий и коммуникационный блок SC2 может управлять осветительным блоком LI2 фонарного столба LP2, чтобы он работал в активном режиме, чтобы фонарный столб LP2 создавал заданное количество света. Кроме того, предположим, что воспринимающий и коммуникационный блок SC2 фонарного столба LP2 обнаруживает, что объект двигается в направлении фонарного столба LP5. В этом случае, воспринимающий и коммуникационный блок SC2 может информировать воспринимающий и коммуникационный блок SC5 фонарного столба LP5 об этом факте. В ответ воспринимающий и коммуникационный блок SC5 фонарного столба LP5 может управлять осветительным блоком LI5 этого фонарного столба, чтобы он работал в активном режиме. В этом примере управление освещением осуществляют локально. Однако управление освещением также можно осуществлять централизованным образом через системный контроллер SCT.
В целом воспринимающий и коммуникационный блок, который может представлять собой какой-либо из воспринимающих и коммуникационных блоков SC1-SC5, проиллюстрированных на фиг. 1, обнаруживает объект по излучению в конкретном диапазоне длин волн. Например, воспринимающий и коммуникационный блок может создавать радиолокационное излучение, которое покрывает область обнаружения вокруг фонарного столба, часть которого формирует этот блок. Объект, который присутствует в этой области обнаружения, будет являться причиной отражения этого излучения радара. Воспринимающий и коммуникационный блок затем может обнаруживать объект по этому отражению, которое исходит от объекта в радиолокационном диапазоне длин волн. В качестве другого примера, воспринимающий и коммуникационный блок может обнаруживать относительно теплый объект по излучению в инфракрасном диапазоне длин волн, которое исходит от объекта.
В зондирующем задающем режиме воспринимающий и коммуникационный блок создает зондирующее излучение в конкретном диапазоне длин волн излучения, по которому обнаруживают объект. Воспринимающий и коммуникационный блок передает зондирующее излучение так, что воспринимающие и коммуникационные блоки относительно близких фонарных столбов могут принимать зондирующее излучение. То есть, воспринимающие и коммуникационные блоки относительно близкого фонарного столба обычно должны принимать зондирующее излучение. Термин «относительно близкий» относится к типичному диапазону расстояний между двумя соседними фонарными столбами. Этот типичный диапазон расстояний может варьировать от одного применения к другому, например, в зависимости от типичной интенсивности света, которую может обеспечивать фонарный столб, или типичной высоты фонарного столба, или и от того и от другого.
В зондирующем подчиненном режиме воспринимающий и коммуникационный блок, который принимает зондирующее излучение от другого воспринимающего и коммуникационного блока, который работает в зондирующем основном режиме, предоставляет подтверждение. Воспринимающий и коммуникационный блок, который принимает зондирующее излучение, может послать это подтверждение на воспринимающий и коммуникационный блок, который работает в зондирующем задающем режиме. Затем последний блок может посылать сообщение системному контроллеру SCT, которое сообщает об этом подтверждении. Альтернативно, воспринимающий и коммуникационный блок, который принимает зондирующее излучение, может посылать подтверждение непосредственно на системный контроллер SCT. В любом случае, подтверждение указывает на то, что воспринимающий и коммуникационный блок, который предоставляет подтверждение, а также фонарный столб, который содержит этот блок, присутствуют в системе SLS уличного освещения. Кроме того, подтверждение подтверждает, что воспринимающий и коммуникационный блок способен обнаруживать объект по излучению на конкретной рассматриваемой длине волны. Следовательно, подтверждение может служить по меньшей мере одной из множества различных целей, например, таких как обнаружение присутствия, подтверждение присутствия и обнаружение отказа.
Воспринимающий и коммуникационный блок предпочтительно работает в зондирующем задающем режиме в течение регулярных интервалов времени. Это вносит вклад в достижение надежного автоматизированного обнаружения отказа. Например, воспринимающий и коммуникационный блок может работать в зондирующем задающем режиме по меньшей мере один раз в сутки, когда присутствует дневной свет и освещение не требуется. Системный контроллер SCT может управлять воспринимающим и коммуникационным блоком для того, чтобы регулярно работать в зондирующем задающем режиме. Альтернативно, воспринимающий и коммуникационный блок может регулярно работать в зондирующем задающем режиме по своей собственной инициативе. В этом случае воспринимающий и коммуникационный блок предпочтительно скоординирован с другими воспринимающими и коммуникационными блоками, в частности, соседними блоками, до вхождения в зондирующий задающий режим. Воспринимающий и коммуникационный блок также можно координировать с системным контроллером SCT, если присутствует.
В случае если воспринимающий и коммуникационный блок фонарного столба работает в зондирующем задающем режиме, воспринимающие и коммуникационные блоки соседних фонарных столбов предпочтительно должны работать в зондирующем подчиненном режиме. Воспринимающий и коммуникационный блок фонарного столба, который вновь добавлен в систему, также предпочтительно должен работать в зондирующем подчиненном режиме. Например, воспринимающий и коммуникационный блок, который работает в зондирующем задающем режиме, может в начальной фазе этого режима широковещательно передавать сигнал, который управляет соседними воспринимающими и коммуникационными блоками, чтобы они работали в зондирующем подчиненном режиме. В качестве другого примера, системный контроллер SCT может управлять указанными выше воспринимающими и коммуникационными блоками, чтобы они работали в зондирующем подчиненном режиме.
Системный контроллер SCT может управлять соответствующими воспринимающими и коммуникационными блоками соответствующих фонарных столбов, чтобы последовательно работать в зондирующем задающем режиме. То есть соответствующие воспринимающие и коммуникационные блоки выполнены так, чтобы они работали в зондирующем задающем режиме друг за другом, в течение соответствующих интервалов времени. Этого также можно достичь без использования системного контроллера SCT. Соответствующие воспринимающие и коммуникационные блоки могут автономно управлять одним из них, чтобы он работал в зондирующем задающем режиме координированным образом. Оба подхода достигают того, что системе SLS уличного освещения соответствующие кластеры воспринимающих и коммуникационных блоков последовательно назначают работать в зондирующем режиме. В таком кластере один воспринимающий и коммуникационный блок работает в зондирующем задающем режиме, тогда как другие воспринимающие и коммуникационные блоки кластера работают в зондирующем подчиненном режиме.
На фиг. 2 схематически проиллюстрирован воспринимающий и коммуникационный блок SC, который можно рассматривать в качестве образца воспринимающих и коммуникационных блоков, проиллюстрированных на фиг. 1. Воспринимающий и коммуникационный блок SC, проиллюстрированный на фиг. 2, таким образом, может содержаться в каком-либо из фонарных столбов LP1-LP5. Воспринимающий и коммуникационный блок SC содержит антенное устройство AA, радиолокационный передатчик TX, радиолокационный приемник RX и контроллер CT. Указанные выше объекты совместно образуют часть модуля ODM обнаружения объекта. Радиолокационный передатчик TX и радиолокационный приемник RX совместно образуют радиолокационный детектор.
Воспринимающий и коммуникационный блок SC дополнительно содержит коммуникационный интерфейс CIF. Коммуникационный интерфейс CIF обеспечивает коммуникационное соединение контроллера CT с системным контроллером SCT, а также контроллеров других воспринимающих и коммуникационных блоков других фонарных столбов. Коммуникационный интерфейс CIF может содержать приемопередатчик для беспроводной связи. Коммуникационный интерфейс CIF может работать в соответствии с протоколом беспроводной связи малой дальности, например, таким как Bluetooth или Zigbee. Альтернативно, блок коммуникационного интерфейса CIF может содержать разделитель-сумматор для проводной связи через силовой распределительный кабель CB, проиллюстрированный на фиг. 1. Разделитель-сумматор может быть сходен с разделителем-сумматором SC, проиллюстрированным на фиг. 1.
Более подробно, контроллер CT может быть в форме процессора, который содержит исполняющее инструкции устройство и набор инструкций, которые управляют контроллером CT для осуществления различных операций, которые будут описаны далее в настоящем документе. Контроллер CT может содержать идентификационные данные ID, которые уникально идентифицируют модуль ODM обнаружения объекта, а также фонарный столб, с которым этот модуль ассоциирован. Контроллер CT коммуникационно связан с осветительным блоком LI, который образует часть того же фонарного столба, что и воспринимающий и коммуникационный блок SC. В связи с этим, воспринимающий и коммуникационный блок SC может содержать управляющий интерфейс, который для простоты не представлен на фиг. 2.
Антенное устройство AA предпочтительно относится к направленному типу. В этом случае, антенное устройство AA может содержать множество антенн, связанных с диаграммообразующей схемой, которая может быть дополнена схемой управления диаграммой. Диаграммообразующая схема типично содержит набор фазовращателей и/или набор линий задержки. Диаграммообразующая схема дополнительно может содержать набор усилителей, связанных с набором фазовращателей или с набором линий задержки, в зависимости от того, какой из двух присутствует в диаграммообразующей схеме. Диаграммообразующая схема может конфигурироваться для работы в режиме передачи, а также в режиме приема. В связи с этим диаграммообразующая схема может содержать усилители передачи и усилители приема.
Воспринимающий и коммуникационный блок SC в основном работает следующим образом. Радиолокационный передатчик TX генерирует радиолокационный передаваемый сигнал TS, который имеет заданную частоту в радиолокационном диапазоне длин волн. Контроллер CT может управлять этой частотой, которая далее упоминается как частота радиолокационной передачи. В связи с этим контроллер CT подает данные управления передачей TC на радиолокационный передатчик TX, который определяет частоту радиолокационной передачи. Контроллер CT может определять другие параметры передачи посредством данных управления передачей TC. Например, контроллер CT может определять конкретный тип модуляции радиолокационного передаваемого сигнала TS, например, такой как импульсная модуляция и пилообразная частотная модуляция. В качестве другого примера, контроллер CT может определять мощность передачи. В случае, если антенное устройство AA содержит усилители передачи, то данные управления передачей TC также подаются на антенное устройство AA.
Антенное устройство AA создает передаваемое радиолокационное излучение TR в ответ на радиолокационный передаваемый сигнал TS. В случае, если антенное устройство AA относится к направленному типу, антенное устройство AA может концентрировать передаваемое радиолокационное излучение TR в конкретном направлении. Контроллер CT может определять это конкретное направление посредством подачи данных DC управления направлением на антенное устройство AA. Данные DC управления направлением, которые предоставляет контроллер CT, таким образом, определяют конкретную направленную диаграмму антенны. Схема управления диаграммой может эффективно переводить данные DC управления направлением в набор управляющих сигналов для диаграммообразующей схемы исходя из того, что эти цепи присутствуют в антенных устройствах AA. Данные DC управления направлением также могут определять всенаправленную диаграмму антенны. Таким образом, контроллер CT может управлять передаваемым радиолокационным излучением TR, чтобы оно было всенаправленным.
Антенное устройство AA может принимать радиолокационное излучение RR, например, от объекта, который достаточно близок к модулю ODM обнаружения объекта. Тогда это принимаемое радиолокационное излучение RR исходит от объекта в качестве отражения передаваемого радиолокационного излучения TR. В любом случае, антенное устройство AA предоставляет сигнал RS приема, который содержит компонент, который характеризует принимаемое радиолокационное излучение RR радара, если оно имеется. Этот компонент далее упоминается как компонент принимаемого радиолокационного сигнала. Компонент принимаемого радиолокационного сигнала имеет частоту в радиолокационном диапазоне длин волн. Эта частота далее упоминается как принимаемая радиолокационная частота. В случае, если принимаемое радиолокационное излучение RR представляет собой отражение передаваемого радиолокационного излучения TR, принимаемая радиолокационная частота будет относительно близка к передаваемой радиолокационной частоте. Тогда принимаемая радиолокационная частота даже может быть идентична радиолокационной передаваемой частоте, если объект, который является причиной отражения, стационарен по отношению к модулю ODM обнаружения объекта.
Радиолокационный приемник RX обрабатывает сигнал RS приема, чтобы обнаруживать, содержит ли сигнал RS приема компонент принимаемого радиолокационного сигнала или нет. Вдобавок, радиолокационный приемник RX может определять один или несколько параметров компонента принимаемого радиолокационного сигнала, таких как, например, амплитуда и частота. Более конкретно, радиолокационный приемник RX может определять разность частот между принимаемой радиолокационной частотой и передаваемой радиолокационной частотой. Радиолокационный приемник RX предоставляет радиолокационные данные RD обнаружения контроллеру CT, который указывает, присутствует ли компонент радиолокационного сигнала или нет. Радиолокационные данные RD обнаружения опционально могут содержать указания, связанные с одним или несколькими параметрами компонента радиолокационного сигнала, если присутствуют.
Контроллер CT может определять один или несколько параметров приема. В связи с этим, контроллер CT может подавать данные RC управления приемом на радиолокационный приемник RX. Например, контроллер CT может определять полосу частот приема, которую можно охарактеризовать в отношении частоты приема и ширины полосы приема. Контроллер CT может определять дополнительные параметры приема посредством данных RC управления приемом. Например, контроллер CT может определять один или несколько порогов для обнаружения компонента радиолокационного сигнала. Радиолокационный приемник RX может применять соответствующие пороги к соответствующим диапазонам разности частот, которые могут существовать между принимаемой радиолокационной частотой и передаваемой радиолокационной частотой.
Модуль ODM обнаружения объекта может определять направление, с которого исходит принимаемое радиолокационное излучение RR. В связи с этим, антенное устройство AA может обеспечивать направленную диаграмму антенны в режиме приема, чтобы концентрировать чувствительность восприятия в конкретном направлении. Как отмечено ранее в настоящем документе, данные DC управления направлением, которые предоставляет контроллер CT, определяют направленную диаграмму антенны и, таким образом, определяют конкретное направление, в котором сосредотачивают чувствительность восприятия. Контроллер CT может управлять антенным устройством AA, чтобы последовательно концентрировать чувствительность восприятия в различных направлениях. Контроллер CT может проверять, для какого-либо заданного направления, указывают ли радиолокационные данные RD обнаружения на то, что компонент принимаемого радиолокационного сигнала присутствует, или нет. В случае если эта проверка является положительной, контроллер CT может определить, что принимаемое радиолокационное излучение RR исходит из рассматриваемого направления. Этот процесс далее упоминается как сканирование направления приема.
Контроллер CT определяет конкретный режим, в котором воспринимающий и коммуникационный блок SC должен работать. Это может представлять собой стандартный режим, зондирующий задающий режим или зондирующий подчиненный режим. Контроллер CT определяет конкретный режим работы, основываясь на сообщениях, которые контроллер CT принимает и/или передает через коммуникационный интерфейс CIF. Например, контроллер CT может принимать сообщение от системного контроллера SCT, который запрашивает работу в зондирующем задающем режиме. Альтернативно, контроллер CT может брать инициативу и обмениваться сообщениями с другими воспринимающими и коммуникационными блоками, чтобы верифицировать возможность работы в зондирующем задающем режиме. В качестве другого примера, контроллер CT может принимать сообщение, которое запрашивает работу в зондирующем подчиненном режиме. Такое сообщение может исходить от другого воспринимающего и коммуникационного блока SC, который работает в зондирующем задающем режиме. Альтернативно, сообщение может исходить от системного контроллера SCT.
В стандартном режиме контроллер CT применяет настройки и осуществляет операции, которые направлены на обнаружение объекта. Например, контроллер CT может задавать частоту радиолокационной передачи воспринимающего и коммуникационного блока SC, чтобы эта частота отличалась от другой частоты радиолокационной передачи других, соседних воспринимающих и коммуникационных блоков. Это позволяет избежать взаимных помех и вызванного этим ошибочного обнаружения объекта. Контроллер CT может задавать полосу частот приема радиолокационного приемника RX так, чтобы эта полоса только пропускала конкретный диапазон разностей частот между принимаемой радиолокационной частотой и передаваемой радиолокационной частотой. Это конкретный диапазон эффективно определяет конкретный диапазон скоростей для объектов, которые подлежат обнаружению.
В стандартном режиме контроллер CT осуществляет управление освещением, основываясь на радиолокационных данных RD обнаружения, которые предоставляет приемник данных. В случае, если радиолокационные данные RD обнаружения указывают на то, что компонент принимаемого радиолокационного сигнала присутствует, контроллер CT принимает решение, что объект представляет собой близкий фонарный столб, часть которого образована воспринимающим и коммуникационным блоком SC. Затем контроллер CT будет типично управлять осветительным блоком фонарного столба, чтобы он работал в активном режиме. В связи с этим, контроллер CT может подавать данные LC управления освещением на осветительный блок LI.
В стандартном режиме воспринимающий и коммуникационный блок SC может осуществлять направленное обнаружение объекта. В связи с этим, контроллер CT может управлять модулем ODM обнаружения объекта для осуществления сканирования направления приема, как описано в настоящем документе ранее. Вместо этого или вдобавок к этому, контроллер CT может управлять модулем ODM обнаружения объекта, чтобы последовательно концентрировать передаваемое радиолокационное излучение TR в различных направлениях. Как изложено выше, контроллер CT может выполнять это посредством данных DC управления направлением. Результатом этого могут быть соответствующие временные интервалы передачи, в которых передаваемое радиолокационное излучение TR концентрируется в соответствующих направлениях. Контроллер CT может проверять, для любого заданного направления, указывают ли радиолокационные данные RD обнаружения на то, что компонент принимаемого радиолокационного сигнала присутствует, или нет. В случае, если эта проверка является положительной, контроллер CT может определить, что объект присутствует в рассматриваемом направлении. Контроллер CT может посылать информацию о направлении, в котором расположен объект, на другой контроллер, который находится в другом фонарном столбе, который расположен в этом направлении. Другой контроллер может использовать эту информацию о направлении, которая предпочтительно сопровождается информацией о скорости объекта, для управления осветительным блоком в другом фонарном столбе.
В зондирующем задающем режиме контроллер CT применяет настройки и осуществляет операции, которые направлены на создание передаваемого радиолокационного излучения TR, чтобы соседние фонарные столбы могли принимать это излучение. То есть, в зондирующем задающем режиме передаваемое радиолокационное излучение TR составляет зондирующее излучение, которое соседние фонарные столбы обычно должны принимать и обнаруживать. В связи с этим, контроллер CT может настраивать радиолокационный передатчик TX и, если необходимо, антенное устройство AA, чтобы зондирующее излучение было достаточно мощным. Контроллер CT предпочтительно должен обеспечивать, чтобы частота зондирующего излучения попадала в полосу частот приема радиолокационного приемника в соседнем фонарном столбе. Этого можно достичь различными путями.
Например в системе SLS уличного освещения, частоту можно специально резервировать для зондирования. В этом случае контроллер CT управляет радиолокационным передатчиком TX, чтобы зондирующее излучение имело эту конкретную зондирующую частоту. Модуль ODM обнаружения объекта соседнего фонарного столба также настраивает его полосу частот приема на конкретную зондирующую частоту. В качестве другого примера, контроллер CT может сохранять радиолокационную передаваемую частоту, которая используется в стандартном режиме. В этом случае модуль ODM обнаружения объекта соседнего фонарного столба должен настраивать свою полосу частот приема на ту радиолокационную передаваемую частоту. В качестве еще одного другого примера модуль ODM обнаружения объекта соседнего фонарного столба может сохранять полосу частот приема, которую используют в стандартном режиме. В этом случае контроллер CT должен управлять радиолокационным передатчиком TX, чтобы частота зондирующего излучения попадала в эту полосу частот приема.
В последних двух примерах системный контроллер SCT может предоставлять информацию, касающуюся соответствующих частот, которые используют соответствующие модули обнаружения объекта, или эту информацию можно получать посредством обмена сообщениями между воспринимающими и коммуникационными блоками. В качестве еще одного другого примера, все модули обнаружения объекта в системе SLS уличного освещения можно синхронизировать, чтобы они работали на одинаковой частоте, независимо от их режимов работы. Однако такая реализация может испытывать взаимные помехи вследствие фазовых шумов.
Зондирование предпочтительно выполняют направленным образом, подобно направленному обнаружению объекта. В случае, если применяют направленное зондирование, контроллер CT управляет антенным устройством AA, чтобы последовательно концентрировать зондирующее излучение в различных направлениях. Контроллер CT может выполнять это посредством данных DC управления направлением. В результате будут иметься соответствующие временные интервалы зондирования, в которых зондирующее излучение концентрируется в соответствующих направлениях. То есть, в конкретном временном интервале зондирования зондирующее излучение концентрируется в конкретном направлении.
Контроллер CT может проверять прием подтверждений во время зондирования. Воспринимающий и коммуникационный блок, который работает в зондирующем подчиненном режиме, будет предоставлять подтверждение в ответ на прием зондирующего излучения. Например, контроллер CT может мгновенно принимать подтверждение через коммуникационный интерфейс CIF. Подтверждение предпочтительно содержит идентификационные данные воспринимающего и коммуникационного блока, который предоставляет подтверждение. В случае, если зондирование является направленным, контроллер CT может связывать подтверждение, а также идентификационные данные, включенные в него, с направлением, в котором концентрируется зондирующее излучение.
В конце зондирующего задающего режима контроллер CT имеет эффективно установленный список соседних воспринимающих и коммуникационных блоков, которые предоставили подтверждения. Этот список далее упоминается как список результатов зондирования. В случае, если зондирование было направленным, список результатов зондирования предпочтительно указывает направление, которое связано с подтверждением. Оно представляет собой направление, в котором расположен соседний воспринимающий и коммуникационный блок, который предоставил подтверждение. Контроллер CT может хранить список результатов зондирования. Контроллер CT также может посылать список результатов зондирования системному контроллеру SCT через коммуникационный интерфейс CIF. Контроллер CT может определять топологию системы SLS уличного освещения или локальной ее части, в случае, если соответствующие другие воспринимающие и коммуникационные блоки сообщили свой соответствующий результат зондирования.
В зондирующем подчиненном режиме контроллер CT применяет настройки и осуществляет операции, которые направлены на прием зондирующего излучения и предоставление подтверждения в ответ на этот прием. Контроллер CT деактивирует радиолокационный передатчик TX, в то время как соседний воспринимающий и коммуникационный блок, который работает в зондирующем задающем режиме, создает зондирующее излучение. Соответственно, тогда радиолокационное излучение RR, которое принимается, как проиллюстрировано на фиг. 2, обычно должно представлять собой зондирующее излучение. Контроллер CT настраивает радиолокационный приемник RX, чтобы настроить его полосу частот приема на частоту зондирующего излучения. Эта частота может представлять собой, например, конкретную частоту зондирования, как отмечено выше.
Контроллер CT может обеспечить относительно узкую полосу частот приема. Полоса частот приема может быть относительно узкой, если, например, имеет место определенная форма синхронизации частоты между соответствующими модулями обнаружения объекта в системе SLS уличного освещения. Поскольку фонарные столбы типично являются стационарными, не нужно учитывать доплеровский сдвиг частоты, в отличие от стандартного режима, где полоса частот приема предпочтительно должна учитывать такие сдвиги. Делая полосу частот приема относительно узкой в зондирующем подчиненном режиме, чувствительность восприятия увеличивается. Это допускает относительно большую дальность зондирования для заданной мощности зондирующего излучения или, наоборот, допускает относительно умеренную мощность зондирующего излучения для заданной дальности зондирования.
Контроллер CT может управлять антенным устройством AA для получения всенаправленной диаграммы антенны для приема зондирующего излучения. В этом случае чувствительность восприятия по существу равномерно распределена по всем направлениям. Контроллер CT также может управлять антенным устройством AA для сканирования направления приема, которое может вносить вклад в достижение относительно большой дальности зондирования. В этом случае, контроллер CT может управлять антенным устройством AA, чтобы последовательно концентрировать чувствительность восприятия в различных направлениях. Такое сканирование направления приема предпочтительно должно быть достаточно быстрым, если воспринимающий и коммуникационный блок, который работает в зондирующем задающем режиме, осуществляет зондирование направленным образом, как описано выше. В этом случае, сканирование направления приема предпочтительно следует осуществлять в пределах типичной длительности временного интервала зондирования, во время которого указанный выше блок концентрирует зондирующее излучение в конкретном направлении.
Контроллер CT также может управлять антенным устройством AA, чтобы иметь по существу фиксированную направленную диаграмму антенны. В этом случае чувствительность восприятия можно концентрировать в конкретном направлении, или нескольких конкретных направлениях, с которых ожидается приход зондирующего излучения. Контроллер CT может определять такое ожидаемое направление, основываясь, например, на результатах зондирования из предыдущих сеансов зондирования. Альтернативно, или вдобавок к этому, контроллер CT может использовать информацию, которую воспринимающий и коммуникационный блок, который работает в зондирующем задающем режиме, сообщил в начальной фазе. Такая информация может содержать идентификационные данные ID этого блока, а также информацию о направлении, которую этот блок установил перед созданием зондирующего излучения. Системный контроллер SCT также может обеспечивать такую информацию.
Как пояснено выше, радиолокационные данные RD обнаружения, которые предоставляет радиолокационный приемник RX, могут указывать на то, что компонент принимаемого радиолокационного сигнала присутствует. В зондирующем подчиненном режиме, это типично указывает на прием зондирующего излучения. Контроллер CT будет предоставлять подтверждение в ответ на такое указание. Контроллер CT предпочтительно содержит идентификационные данные ID в подтверждении. Контроллер CT может мгновенно посылать подтверждение на воспринимающий и коммуникационный блок SC, который работает в зондирующем задающем режиме через коммуникационный интерфейс CIF. Альтернативно, или вдобавок к этому, контроллер CT может посылать подтверждение системному контроллеру SCT через коммуникационный интерфейс CIF. Подтверждение можно предоставлять с некоторой задержкой, после зондирования.
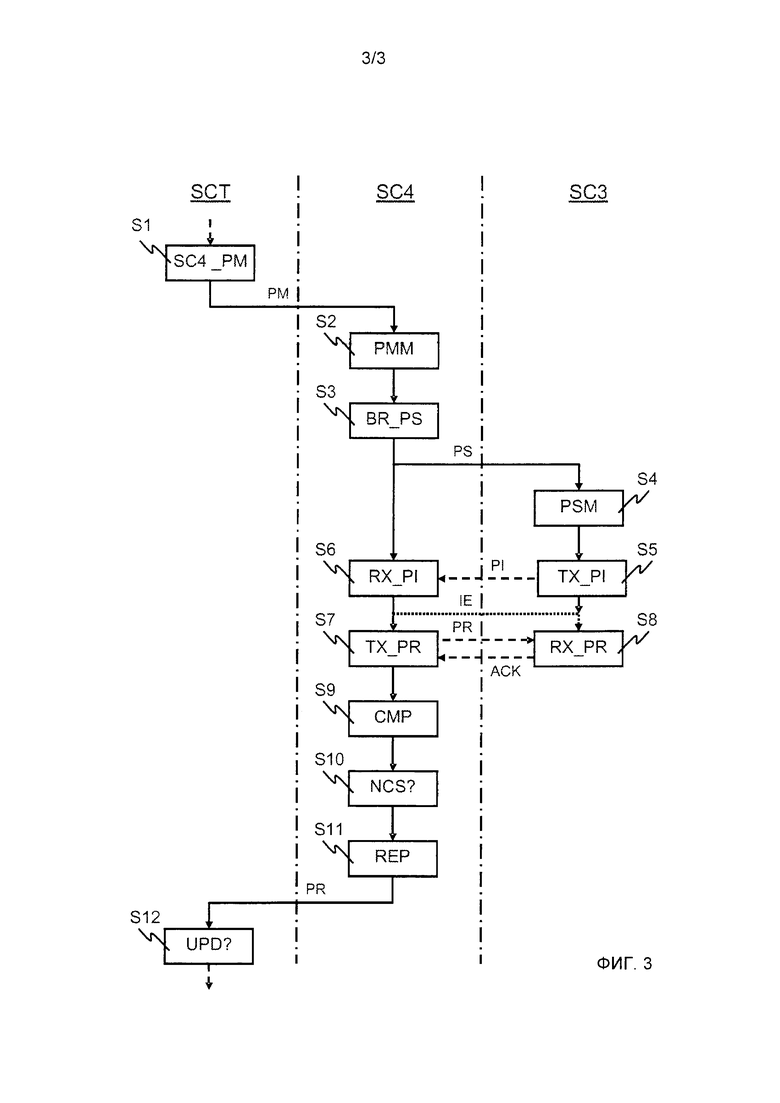
На фиг. 3 проиллюстрирован сеанс зондирования в способе работы системы SLS уличного освещения, проиллюстрированной на фиг. 1. Сеанс зондирования содержит ряд стадий S1-S12, в которых участвует системный контроллер SCT, воспринимающий и коммуникационный блок SC4 фонарного столба LP4 и воспринимающий и коммуникационный блок SC3 фонарного столба LP3. Фиг. 3 разделена на три вертикальные части. Левая часть иллюстрирует различные стадии, которые осуществляет системный контроллер SCT. Средняя часть иллюстрирует различные стадии, которые осуществляет воспринимающий и коммуникационный блок SC4 фонарного столба LP4. Правая часть иллюстрирует различные стадии, которые осуществляет воспринимающий и коммуникационный блок SC3 фонарного столба LP3.
Таким образом, левую часть фиг. 3 можно рассматривать в качестве графического представления набора инструкций, которые позволяют системному контроллеру SCT осуществлять различные операции, описанные далее со ссылкой на фиг. 3. Аналогичным образом, среднюю часть и правую часть фиг. 3 можно рассматривать в качестве графического представления наборов инструкций, которые позволяют воспринимающему и коммуникационному блоку SC4 фонарного столба LP4 и воспринимающему и коммуникационному блоку SC3 фонарного столба LP3, соответственно, осуществлять различные операции, описанные далее со ссылкой на фиг. 3. Предполагается, что указанные выше блоки работают в стандартном режиме, когда начинается сеанс зондирования, проиллюстрированный на фиг. 3. Кроме того, предполагается, что системный контроллер SCT уже определил топологию системы SLS уличного освещения, как указано выше.
На этапе S1 (SC4_PM) системный контроллер SCT посылает сообщение PM, устанавливающее зондирующий задающий режим, на воспринимающий и коммуникационный блок SC4 фонарного столба LP4. Сообщение PM, устанавливающее зондирующий задающий режим, дает этому блоку SC4 команду работать в зондирующем задающем режиме. Сообщение PM, устанавливающее зондирующий задающий режим, также может быть в форме запроса на такую работу. В этом случае, системный контроллер SCT типично будет ожидать ответное сообщение, подтверждающее работу в зондирующем задающем режиме.
На этапе S2 (PMM) воспринимающий и коммуникационный блок SC4 фонарного столба LP4 переключается с работы в стандартном режиме на работу в зондирующем задающем режиме PMM после приема сообщения PM, устанавливающего зондирующий задающий режим, от системного контроллера SCT. В зондирующем задающем режиме контроллер CT воспринимающего и коммуникационного блока SC4 применяет начальные настройки и осуществляет начальные операции, которые предшествуют настройке и операциям, описанным выше в настоящем документе со ссылкой на фиг. 2. То есть зондирующий задающий режим содержит начальную фазу, которая будет описана далее.
На этапе S3 (BR_PS) который образует часть начальной фазы зондирующего задающего режима, воспринимающий и коммуникационный блок SC4 широковещательно передает сообщение PS, устанавливающее подчиненное зондирование. Сообщение PS, устанавливающее подчиненное зондирование, дает другим воспринимающим и коммуникационным блокам, которые принимают это сообщение, команду работать в зондирующем подчиненном режиме. Сообщение PS, устанавливающее подчиненное зондирование, также может быть в форме запроса. Воспринимающий и коммуникационный блок SC4 предпочтительно широковещательно передает сообщение PS, устанавливающее подчиненное зондирование, посредством его коммуникационного интерфейса CIF. Согласно фиг. 1, предполагается, то воспринимающие и коммуникационные блоки SC3 и SC5 фонарных столбов LP3 и LP5, соответственно, принимают сообщение PS, устанавливающее подчиненное зондирование. В дальнейшем описаны этапы, которые осуществляет воспринимающий и коммуникационный блок SC3. Таким образом, воспринимающий и коммуникационный блок SC5 также может осуществлять эти этапы.
На этапе S4 (PSM) воспринимающий и коммуникационный блок SC3 фонарного столба LP3 переключается с работы в стандартном режиме на работу в зондирующем подчиненном режиме PSM после приема сообщения PS, устанавливающего подчиненное зондирование, от воспринимающего и коммуникационного блока SC3, который работает в зондирующем задающем режиме. В зондирующем подчиненном режиме, контроллер CT воспринимающего и коммуникационного блока SC3 применяет начальные настройки и осуществляет начальные операции, которые предшествуют настройкам и операциям, описанным выше со ссылкой на фиг. 2. То есть, зондирующий подчиненный режим также содержит начальную фазу, которая дополняет таковую зондирующего задающего режима.
На этапе S5 (TX_PI), который образует часть начальной фазы зондирующего подчиненного режима, воспринимающий и коммуникационный блок SC3 создает передаваемое радиолокационное излучение, которое предназначено для воспринимающего и коммуникационного блока SC4, который работает в зондирующем задающем режиме. Передаваемое радиолокационное излучение предоставляет указание на присутствие для последнего блока и, следовательно, в настоящем документе обозначено как указывающее на присутствие излучение PI. Указывающее на присутствие излучение PI может иметь частоту, которая аналогична частоте зондирующего излучения, которая описана выше. Указывающее на присутствие излучение PI может быть всенаправленным или, что предпочтительно, может быть сконцентрированным в направлении воспринимающего и коммуникационного блока SC4. Воспринимающий и коммуникационный блок SC3 может знать это направление из предыдущего сеанса зондирования. Также возможно для системного контроллера SCT или воспринимающего и коммуникационного блока SC4 предоставлять воспринимающему и коммуникационному блоку SC3 указание на это направление.
На этапе S6 (RX_PI), который образует часть начальной фазы зондирующего задающего режима, воспринимающий и коммуникационный блок SC4 фонарного столба LP4 осуществляет сканирование направления приема. Радиолокационный передатчик TX деактивируют во время сканирования направления приема. Радиолокационный приемник RX работает и настраивается на прием указывающего на присутствие излучения PI соседнего воспринимающего и коммуникационного блока. Воспринимающий и коммуникационный блок SC4 последовательно концентрирует чувствительность восприятия в различных направлениях. Со ссылкой на фиг. 2, радиолокационные данные RD обнаружения могут указывать на то, что для конкретного направления компонент принимаемого радиолокационного сигнала присутствует. Это указывает на то, что соседний воспринимающий и коммуникационный блок, который создает указывающее на присутствие излучение PI, присутствует в этом конкретном направлении. Таким образом, этапы S5 и S6 осуществляются параллельно.
После завершения сканирования направления приема, воспринимающий и коммуникационный блок SC4 эффективно имеет список соответствующих направлений, в которых расположены соответствующие соседние воспринимающие и коммуникационные блоки. Этим завершается начальная фаза зондирующего задающего режима. Затем воспринимающий и коммуникационный блок SC4 может посылать сообщение IE об окончании начальной фазы соответствующим воспринимающим и коммуникационным блокам, сигнализирующее о том, что начальная фаза зондирующего подчиненного режима также должна быть завершена. Альтернативно, воспринимающие и коммуникационные блоки, которые работают в зондирующем подчиненном режиме, могут автономно завершать начальную фазу в результате, например, истечения заданного временного интервала, который присвоен начальной фазе.
На этапе S7 (TX_PR) воспринимающий и коммуникационный блок SC4 фонарного столба LP4, который работает в зондирующем задающем режиме, создает зондирующее излучение PR, посредством чего это излучение последовательно концентрируется в соответствующих направлениях, которые определены на предшествующем этапе S6. Таким образом, зондирующее излучение PR последовательно направляется в направлении соответствующих соседних коммуникационных блоков, с которых указывающее на присутствие излучение PI принято в начальной фазе.
В остальном, воспринимающий и коммуникационный блок SC4 работает так же, как описано выше со ссылкой на фиг. 2 относительно зондирующего задающего режима. Воспринимающий и коммуникационный блок SC4, таким образом, ожидает подтверждения соседнего воспринимающего и коммуникационного блока, в направлении которого направлено зондирующее излучение PR. Таким образом, результатом этапа S7 является список результатов зондирования, как описано выше со ссылкой на фиг. 2. Список результатов зондирования идентифицирует соседние воспринимающие и коммуникационные блоки, а также соответствующие направления, в которых эти блоки расположены.
На этапе S8 (RX_PR) воспринимающий и коммуникационный блок SC3 фонарного столба LP3 работает в зондирующем подчиненном режиме, как описано со ссылкой на фиг. 2. Таким образом, воспринимающий и коммуникационный блок SC3 предоставляет подтверждение ACK после приема зондирующего излучения PR от воспринимающего и коммуникационного блока SC4 фонарного столба LP4. В случае, если воспринимающий и коммуникационный блок SC3 не смог принять или обнаружить зондирующее излучение PR, этот блок не предоставляет какое-либо подтверждение. Таким образом, стадии S7 и S8 осуществляют параллельно.
На этапе S9 (CMP) воспринимающий и коммуникационный блок SC4 фонарного столба LP4, который работает в зондирующем задающем режиме, сравнивает список результатов зондирования с предыдущим списком результатов зондирования из предыдущего сеанса зондирования, если имеется. Контроллер CT, проиллюстрированный на фиг. 2, может осуществлять это сравнение. Соответственно, контроллер CT может идентифицировать один или несколько новых воспринимающих и коммуникационных блоков, при наличии, и один или несколько недостающих воспринимающих и коммуникационных блоков, при наличии. Новый воспринимающий и коммуникационный блок типично указывает на новый фонарный столб, который был добавлен в систему SLS уличного освещения, или фонарный столб, который был починен. Недостающий воспринимающий и коммуникационный блок типично указывает на отказ или фонарный столб, который удален из системы SLS уличного освещения.
В системе SLS уличного освещения дополнительные данные могут быть доступны в отношении добавления и удаления фонарных столбов. В этом случае возможно делать определенные выводы по новым и недостающим фонарным столбам, которые идентифицируются посредством сравнения со списком результатов зондирования. Изначально, когда система SLS уличного освещения только установлена, список результатов зондирования из первого начального сеанса зондирования отражает все функциональные соседние воспринимающие и коммуникационные блоки.
На этапе S10 (NCS?) воспринимающий и коммуникационный блок SC4 фонарного столба LP4, который работал в зондирующем задающем режиме, оценивает, должна ли быть реализована новая коммуникационная схема или нет, основываясь на списке результатов зондирования. Контроллер CT, проиллюстрированный на фиг. 2, может осуществлять эту оценку и реализовать новую коммуникационную схему, если необходимо. Например, со ссылкой на фиг. 2, предположим, что контроллер CT конфигурировал коммуникационный интерфейс CIF для передачи сообщения, которое адресовано системному контроллеру SCT, на воспринимающий и коммуникационный блок SC3 фонарного столба LP3. Эта коммуникационная схема сохраняется до тех пор, пока последний из упомянутых воспринимающий и коммуникационный блок SC3 предоставляет подтверждение во время сеансов зондирования, где воспринимающий и коммуникационный блок SC4 работает в зондирующем задающем режиме.
Однако, в случае, если воспринимающий и коммуникационный блок SC3 фонарного столба LP3 не предоставляет какое-либо подтверждение, контроллер CT воспринимающего и коммуникационного блока SC4 фонарного столба LP4 будет реализовывать новую коммуникационную схему, в качестве меры предосторожности. Например, со ссылкой на фиг. 1, новая коммуникационная схема может обеспечивать то, что коммуникационный интерфейс CIF воспринимающего и коммуникационного блока SC4 фонарного столба LP4 должен передавать сообщение, которое адресовано системному контроллеру SCT, на воспринимающий и коммуникационный блок SC5 фонарного столба LP5. Это удовлетворяет условию о том, что последний блок SC5 предоставил подтверждение во время сеанса зондирования. Новая коммуникационная схема влечет за собой новый участок скачкообразной передачи для сообщений, которые исходят от воспринимающего и коммуникационного блока SC4, или которые проходят через этот блок.
На этапе S11 (REP) воспринимающий и коммуникационный блок SC4 фонарного столба LP4, который работает в зондирующем задающем режиме, посылает отчет PR о зондировании на системный контроллер SCT. Отчет PR о зондировании может содержать список результатов зондирования. Отчет PR о зондировании дополнительно может содержать другую информацию, связанную с сеансом зондирования, который имел место, например, такую как изменение в коммуникационной схеме. В случае, если список результатов зондирования идентичен списку результатов зондирования непосредственно предшествующего сеанса зондирования, отчет PR о зондировании может содержать указание об этом. Это указание эффективно составляет ссылку на предыдущий список результатов зондирования, который уже передан. В целом, после передачи начального списка результатов зондирования достаточно, чтобы отчет PR о зондировании идентифицировал какие-либо изменения для системного контроллера SCT.
На этапе S12 (UPD?) системный контроллер SCT оценивает, должна ли быть обновлена топология системы SLS уличного освещения или нет, основываясь на отчете PR о зондировании. В случае, если отчет PR о зондировании указывает на изменение, системный контроллер SCT адаптирует топологию, чтобы ввести это изменение.
Изначально, когда система SLS уличного освещения только что установлена, системный контроллер SCT определяет начальную топологию, основываясь на соответствующих начальных отчетах о зондировании от соответствующих воспринимающих и коммуникационных блоков. Тогда эти начальные отчеты о зондировании типично будут включать соответствующие списки результатов зондирования от соответствующих воспринимающих и коммуникационных блоков. Начальный отчет о зондировании, который исходит от воспринимающего и коммуникационного блока, который сначала работал в зондирующем задающем режиме, отражает соседние воспринимающие и коммуникационные блоки. Начальный отчет о зондировании дополнительно может указывать на соответствующие направления, в которых эти соседние блоки расположены, по отношению к воспринимающему и коммуникационному блоку, который предоставляет этот отчет. Последнее предполагает, что зондирование выполняется направленным образом, как описано выше в настоящем документе.
ЗАКЛЮЧИТЕЛЬНЫЕ ПРИМЕЧАНИЯ
Подробное описание выше в настоящем документе со ссылкой на чертежи представляет собой лишь иллюстрацию изобретения и дополнительных признаков, которые определены в формуле изобретения. Изобретение можно реализовать множеством различных путей. Для того чтобы проиллюстрировать это, некоторые альтернативы указаны в кратком изложении.
Изобретение можно применять с пользой во многих типах систем или способов с использованием множества модулей обнаружения объекта. Уличное освещение является лишь примером. В качестве другого примера, изобретение можно применять с пользой в системе освещения интерьера. В качестве еще одного другого примера, изобретение можно применять с пользой в системе тревоги, которая содержит множество модулей обнаружения объекта.
Существуют различные пути обнаружения объекта по излучению. Обнаружение объекта посредством передачи и приема излучения радара является лишь примером. В качестве другого примера обнаружение объекта может быть основано на передаче и приеме ультразвукового излучения. В качестве еще одного другого примера, обнаружение объекта может быть основано на приеме только инфракрасного излучения. Следовательно, термин «модуль обнаружения объекта» следует понимать в широком смысле. Термин охватывает любую сущность, способную обнаруживать объект по принимаемому излучению, которое исходит от объекта.
Зондирование необязательно осуществлять направленным образом, несмотря на то, что это благоприятно. Зондирующее излучение может быть всенаправленным и зондирующее излучение можно принимать с использованием всенаправленной чувствительности. В этом случае зондирование может обеспечивать только идентификацию соседей. Это может быть достаточным для определения базовой топологии и для обнаружения отказа. В такой всенаправленной реализации, соответствующим модулям обнаружения объекта, которые параллельно работают в зондирующем подчиненном режиме, можно присваивать соответствующие временные интервалы для предоставления подтверждения. Это позволяет избежать противоречий между подтверждениями.
Система в соответствии с изобретением не должна обязательно содержать системный контроллер. Модули обнаружения объекта могут совместно реализовывать действия по управлению системой, такие как, например, зондирование; координированным образом. Например, координационный протокол может предотвращать одновременную работу модулей обнаружения объекта, которые расположены относительно близко, в зондирующем задающем режиме. Кроме того, модули обнаружения объекта могут связываться друг с другом в соответствии с протоколом управления доступом к среде (MAC). Модуль обнаружения объекта может широковещательно передавать результат зондирования на другие модули обнаружения объекта, которые образуют часть той же системы. Тогда модуль обнаружения объекта может локально определять топологию системы, включая информацию об отказе.
Система в соответствии с изобретением необязательно содержит источник электрической энергии и силовой распределительный кабель. Например, каждый фонарный столб может питаться индивидуально посредством, например, солнечной батареи, которая может быть дополнена аккумулятором. В такой реализации, фонарные столбы типично будут связываться друг с другом беспроводным образом.
Система в соответствии с изобретением не обязательно содержит модули обнаружения объекта, которые предоставлены с коммуникационными модулями, несмотря на то, что это может быть благоприятным. Модуль обнаружения объекта может связываться с другим модулем обнаружения объекта с использованием зондирующего излучения или схожего излучения в качестве носителя для передачи данных. В этом отношении следует отметить, что подтверждение не нужно предоставлять немедленно, или во время сеанса зондирования. Подтверждение можно предоставлять после завершения сеанса зондирования.
В целом, существует множество различных путей реализации изобретения, посредством чего различные реализации могут иметь различные топологии. В какой-либо заданной топологии один модуль может осуществлять несколько функций или несколько модулей могут совместно осуществлять одну функцию. В этом отношении чертежи являются весьма схематичными. Например, со ссылкой на фиг. 2, контроллер CT и по меньшей мере часть коммуникационного интерфейса CIF могут формировать часть одного модуля интегральной схемы.
Имеет место множество функций, которые можно реализовать посредством аппаратного обеспечения или программного обеспечения, или их комбинации. Описание реализации, основанной на программном обеспечении, не исключает реализации, основанной на аппаратном обеспечении, и наоборот. Также возможны гибридные реализации, которые содержат одну или несколько специализированных схем, а также один или несколько соответствующим образом запрограммированных процессоров. Например, различные функции, описанные выше в настоящем документе со ссылкой на чертежи, можно реализовать посредством одной или нескольких специализированных схем, посредством которых конкретная топология схемы определяет конкретную функцию.
Примечания, сделанные ранее в настоящем документе, демонстрируют, что подробное описание со ссылкой на чертежи является иллюстрацией изобретения, а не ограничением. Изобретение можно реализовать множеством альтернативных путей, которые входят в общем приложенной формулы изобретения. Все изменения, которые входят в значение и диапазон равнозначности формулы изобретения, подлежат включению в их объем. Любую ссылочную позицию в пункте формулы изобретения не следует толковать в качестве ограничения пункта формулы изобретения. Слово «содержит» не исключает присутствия других элементов или стадий, кроме тех, что перечислены в пункте формулы изобретения. Элемент или этап в единственном числе не исключает присутствия множества таких элементов или этапов. Сам факт того, что соответствующие зависимые пункты формулы изобретения определяют соответствующие дополнительные признаки, не исключает комбинации дополнительных признаков, отличных от тех, что отражены в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ПРИВЕДЕНИЕ В ДЕЙСТВИЕ ОСВЕТИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2696003C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ОБЛЕГЧЕНИЯ СОЗДАНИЯ, ВЫБОРА И/ИЛИ НАСТРОЙКИ ЭФФЕКТОВ ОСВЕЩЕНИЯ ИЛИ СВЕТОВОГО ШОУ | 2008 |
|
RU2498540C2 |
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКАЯ СИСТЕМА МОНИТОРИНГА ОБСТАНОВКИ, ПРЕДУПРЕЖДЕНИЯ И ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2014 |
|
RU2558658C1 |
| Способ и устройство обнаружения радиоуправляемых взрывных устройств с применением беспилотного летательного аппарата | 2018 |
|
RU2745658C2 |
| Система беспроводной подачи энергии и устройство беспроводного приёма энергии | 2014 |
|
RU2632774C1 |
| СПОСОБЫ ДЛЯ АДАПТИВНОГО УПРАВЛЯЕМОГО ОСВЕЩЕНИЯ НА ОСНОВЕ ТРАНСПОРТНОГО ПОТОКА В НАРУЖНЫХ ОСВЕТИТЕЛЬНЫХ СЕТЯХ | 2013 |
|
RU2648271C2 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОСТА | 2015 |
|
RU2598803C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244322C1 |
| МОДУЛЬ ПЛАНИРОВАНИЯ | 2009 |
|
RU2415456C1 |
| СНИЖЕНИЕ НАГРУЗКИ В ВЫКЛЮЧЕННОМ СОСТОЯНИИ ТРАНСПОРТНОГО СРЕДСТВА С ПОМОЩЬЮ ВНЕШНЕГО ДАТЧИКА | 2016 |
|
RU2704772C2 |

Изобретение относится к системе обнаружения объектов. Технический результат состоит в повышении точности обнаружения объекта. Для этого система содержит множество модулей обнаружения объекта (SC3, SC4). Модуль обнаружения объекта обнаруживает объект по излучению в конкретном диапазоне длин волн. Система выполнена с возможностью управлять модулем обнаружения объекта (SC4), чтобы он работал в зондирующем основном режиме (PMM). В этом режиме модуль обнаружения объекта (SC3) создает зондирующее излучение (PR) в конкретном диапазоне длин волн. Другим модулем обнаружения объекта (SC3) управляют, чтобы он работал в зондирующем подчиненном режиме (PSM). В этом режиме другой модуль обнаружения объекта (SC3) предоставляет подтверждение (ACK) в ответ на прием зондирующего излучения (PR). 4 н. и 11 з.п. ф-лы, 3 ил.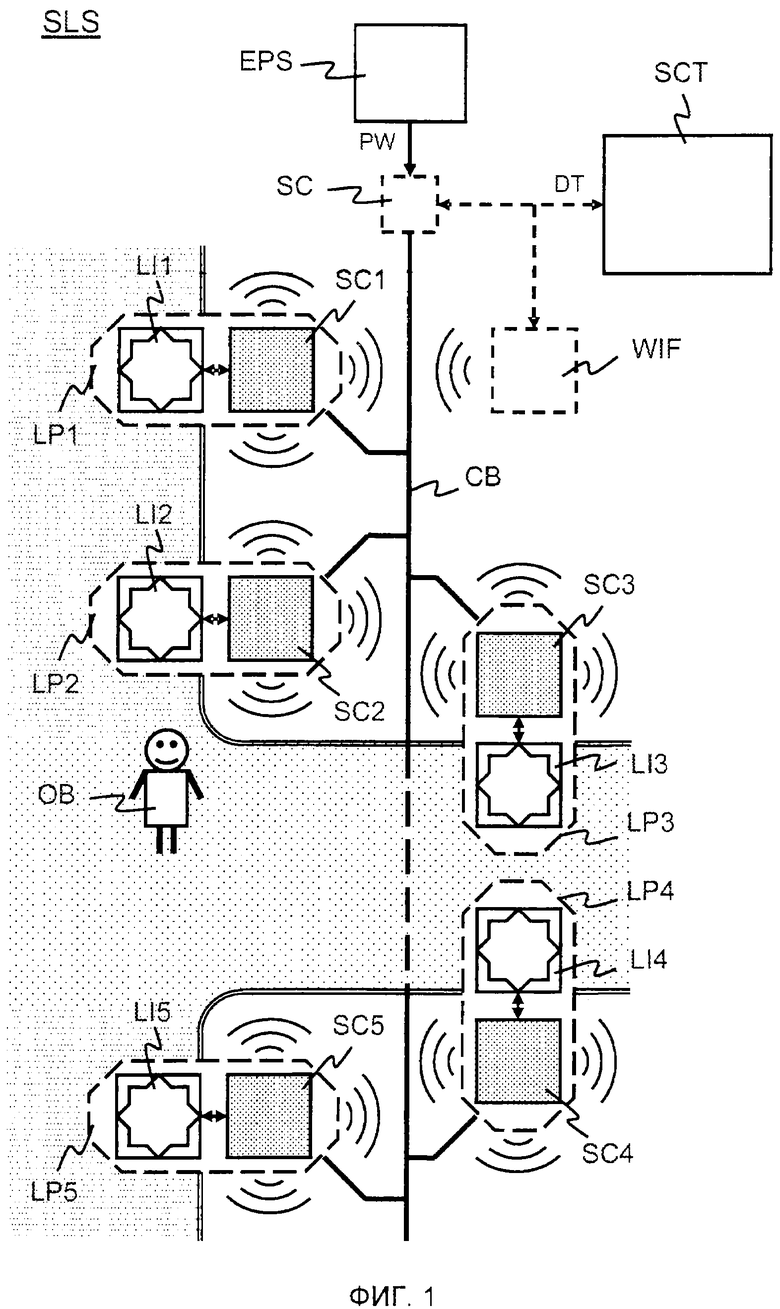
1. Система (SLS), содержащая множество модулей обнаружения объекта, причем модуль (ODM) обнаружения объекта выполнен с возможностью обнаруживать объект по излучению (RR) в конкретном диапазоне длин волн, система выполнена с возможностью управлять модулем обнаружения объекта, чтобы он работал в зондирующем основном режиме (РММ), в котором этот модуль обнаружения объекта создает зондирующее излучение (PR) в конкретном диапазоне длин волн, и управлять другим модулем обнаружения объекта, чтобы он работал в зондирующем подчиненном режиме (PSM), в котором этот другой модуль обнаружения объекта предоставляет подтверждение (ACK) в ответ на прием зондирующего излучения.
2. Система по п. 1, в которой модуль (ODM) обнаружения объекта, который работает в зондирующем задающем режиме (РММ), выполнен с возможностью сосредотачивать зондирующее излучение (PR) по меньшей мере в одном из множества различных направлений, причем система содержит управляющий объект (СТ), выполненный с возможностью связывать направление, в котором концентрируется зондирующее излучение, с подтверждением (ACK) от другого модуля обнаружения объекта, который работает в зондирующем подчиненном режиме (PSM).
3. Система по п. 1, причем система выполнена с возможностью управлять модулем (ODM) обнаружения объекта, который работает в зондирующем задающем режиме (РММ), и другим модулем обнаружения объекта, который работает в зондирующем подчиненном режиме (PSM), для осуществления начальной фазы (S3-S6), в которой модуль обнаружения объекта, который работает в зондирующем подчиненном режиме, создает указывающее на присутствие излучение (PI), и модуль обнаружения объекта, который работает в зондирующем задающем режиме (РММ), последовательно концентрирует чувствительность восприятия в соответствующих различных направлениях, чтобы обнаруживать направление, с которого приходит указывающее на присутствие излучение на этот модуль обнаружения объекта, модуль обнаружения объекта, который работает в зондирующем задающем режиме, выполнен с возможностью затем концентрировать зондирующее излучение (PR) в этом направлении.
4. Система по п. 1, в которой модуль обнаружения объекта, который работает в зондирующем задающем режиме (РММ), выполнен с возможностью широковещательно передавать сигнал (PS), который управляет другим модулем обнаружения объекта, который принимает этот сигнал, чтобы он работал в зондирующем подчиненном режиме (PSM).
5. Система по п. 1, причем система содержит управляющий объект (SCT), выполненный с возможностью регистрировать модуль (ODM) обнаружения объекта, который работает в зондирующем задающем режиме (РММ), и другой модуль обнаружения объекта, который работает в зондирующем подчиненном режиме (PSM), в качестве соседей друг друга, в случае, если модуль обнаружения объекта, который работает в зондирующем подчиненном режиме, предоставляет подтверждение (ACK).
6. Система по п. 1, причем система содержит управляющий объект (SCT), выполненный с возможностью регистрировать неисправность, если модуль (ODM) обнаружения объекта, который работает в зондирующем задающем режиме (РММ), и другой модуль обнаружения объекта, который работает в зондирующем подчиненном режиме (PSM), зарегистрированы в качестве соседей, и модуль обнаружения объекта, который работает в зондирующем подчиненном режиме, не предоставляет какое-либо подтверждение (ACK).
7. Система по п. 1, причем система выполнена с возможностью управлять модулем (ODM) обнаружения объекта, чтобы он работал в зондирующем задающем режиме (РММ), и управлять другими модулями обнаружения объекта, чтобы они работали в зондирующем подчиненном режиме (PSM), в течение регулярных интервалов времени.
8. Система по п. 1, причем система выполнена с возможностью управлять соответствующими модулями из множества модулей обнаружения объекта, чтобы они работали в зондирующем задающем режиме (РММ) в течение соответствующих интервалов времени, и управлять соответствующими другими модулями из множества модулей обнаружения объекта, чтобы они работали в зондирующем подчиненном режиме (PSM).
9. Система по п. 8, причем управляющий объект выполнен с возможностью определять топологию множества модулей обнаружения объекта, основываясь на соответствующих подтверждениях (ACK), которые сообщены в течение соответствующих интервалов времени.
10. Система по п. 1, в которой соответствующие модули (ODM) обнаружения объекта связаны с соответствующими коммуникационными модулями (CIF), коммуникационный модуль, который связан с модулем обнаружения объекта, сконфигурирован, чтобы передавать сообщение на соседний коммуникационный модуль, который связан с соседним модулем обнаружения объекта, до тех пор, пока соседний модуль обнаружения объекта предоставляет подтверждение (ACK) в ответ на зондирующее излучение (PR) от модуля обнаружения объекта, и иным образом передавать сообщение на другой соседний коммуникационный модуль, который связан с другим соседним модулем обнаружения объекта, который предоставил подтверждение в ответ на зондирующее излучение модуля обнаружения объекта.
11. Система по п. 1, в которой соответствующие модули обнаружения объекта содержат соответствующие радиолокационные детекторы, при этом зондирующее излучение (PR) представлено в форме радиолокационного сигнала.
12. Система по п. 1, в которой соответствующие модули обнаружения объекта формируют часть соответствующих компоновок освещения (LP1-LP5).
13. Модуль (ODM) обнаружения объекта для использования в системе (SLS) по п. 1, причем модуль обнаружения объекта выполнен с возможностью обнаруживать объект по излучению в конкретном диапазоне длин волн, модуль обнаружения объекта выполнен с возможностью работы в зондирующем основном режиме (РММ), в котором модуль обнаружения объекта создает зондирующее излучение (PR) в конкретном диапазоне длин волн, и работы в зондирующем подчиненном режиме (PSM), в котором модуль обнаружения объекта предоставляет подтверждение (ACK) в ответ на прием зондирующего излучения от другого модуля обнаружения объекта.
14. Способ работы системы, содержащей множество модулей обнаружения объекта, причем модуль (ODM) обнаружения объекта выполнен с возможностью обнаруживать объект по излучению в конкретном диапазоне длин волн, при этом способ включает:
фазу зондирования (S1-S12), в которой модулем обнаружения объекта управляют, чтобы он работал в зондирующем основном режиме (РММ), в котором этот модуль обнаружения объекта создает зондирующее излучение (PR) в конкретном диапазоне длин волн, и другим модулем обнаружения объекта управляют, чтобы он работал в зондирующем подчиненном режиме (PSM), в котором этот модуль обнаружения объекта предоставляет подтверждение (ACK) в ответ на прием зондирующего излучения.
15. Машиночитаемый носитель, содержащий набор инструкций, которые позволяют процессору, который способен исполнять набор инструкций, осуществлять способ по п. 14.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ крашения мехов | 1939 |
|
SU56653A1 |
| СОЕДИНЕНИЯ ФЕНИЛУКСУСНОЙ КИСЛОТЫ | 2008 |
|
RU2470926C2 |
| US 5400031 A, 21.03.1996 | |||
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |

