Настоящее изобретение относится к области радиолокации, в частности к радиолокационным системам (РЛС) ближней радиолокации, в которых нелинейные радиолокаторы (HPЛ), осуществляют поиск объектов, содержащих активные радиоэлементы. Причем отражение от такого объекта поиска происходит на высших гармониках зондирующего сигнала, возникающих при нелинейном преобразовании в активных элементах объекта поиска.
Актуальность разработки новых радиолокационных способов и устройств обусловлена возрастанием во всем мире угрозы «взрывного» терроризма, а также непрекращающимися военными конфликтами, в ходе которых радиоуправляемые взрывные устройства (РВУ) получают все большее распространение. При этом дальность действия радиолокации обусловливает удаление оператора поиска (персонала) от обнаруживаемых РВУ, достаточное для безопасности жизнедеятельности, в отличие от широко применяемых близкодействующих средств обнаружения взрывных устройств - специальных щупов или активных индукционных металлообнаружителей.
Известно, что для обнаружения скрытых в маскирующей среде РВУ применяются радиолокационные устройства, работающие в определенных режимах локации [1]. Принцип их действия основан на облучении обследуемых объектов короткими радиочастотными импульсами и приеме сигналов откликов (переизлученных сигналов) на частотах второй и третьей гармоник зондирующего излучения.
Сигналы отклики на частотах второй и третьей гармоник зондирующего излучения появляются в результате спектрального преобразования зондирующего сигнала на элементах с нелинейной вольтамперной характеристикой. Такой характеристикой обладают полупроводниковые элементы, входящие в состав радиоэлектронных устройств.
При облучении радиоэлектронных устройств в спектре переизлученного сигнала, как правило, преобладают четные гармонические составляющие зондирующего излучения (2-я гармоника), напротив, при облучении контактов металлических предметов, как правило, в спектре переизлученного сигнала преобладают нечетные гармоники (3-я гармоника).
Регистрируя с помощью приемника сигналы на частотах, соответствующих второй и третьей гармоникам, по соотношению их уровней оператор отличает объекты, содержащие электронные схемы с полупроводниковыми элементами от объектов, содержащих металлические контакты.
Известен способ нелинейной локации [2], заключающийся в генерации 2-х гармонических сигналов S1 и S2 с частотами ƒ1 и ƒ2 соответственно, излучении в направлении РВУ 2-х зондирующих сигналов (ЗС), приеме отраженного сигнала, синхронном детектировании принимаемого сигнала с помощью опорного колебания S0 частоты f0 и принятии решения об обнаружении нелинейно-рассеивающего объекта путем сравнения в пороговой схеме мощности выходного сигнала синхронного детектора с порогом.
Данный способ реализуется в известном нелинейном радиолокаторе - переносном детекторе нелинейных переходов «NR-900EK», принятом за прототип [2]. Моногармонический зондирующий сигнал, формируемый передатчиком, подается на направленную передающую антенну и излучается в направлении объекта обследования. На нелинейных (полупроводниковых) элементах объекта обследования зондирующий сигнал преобразуется в полигармонический («обогащается» гармониками) и переизлучается.
Переизлученный сигнал принимается приемной антенной и поступает на входы приемников, которые выделяют сигналы 2-й и 3-й гармоник частоты зондирования. С приемников выделенные сигналы поступают для дальнейшей обработки в блок обработки. После обработки принятых сигналов в блоке обработки их уровни отображаются на светодиодных индикаторах пульта управления и индикации (СДИ ПУИ). Решение о виде объекта принимается по соотношению уровней сигналов откликов на частотах 2-й и 3-й гармоник частоты зондирования.
Недостатком прототипа является ограниченная дистанция обнаружения РВУ и как следствие невозможность использования этого НРЛ в комплексе с беспилотным летательным аппаратом.
Техническим результатом предлагаемого изобретения является увеличение дальности обнаружения РВУ.
Сущность предлагаемого способа заключается в следующем:
В известный прототип введена опция «Саунд» (или «Sound» - звук, англ.), которая для нового НРЛ предназначена для увеличения дальности обнаружения РВУ за счет психофизиологического явления, связанного со способностью оператора-человека обнаруживать малейшие (в 10 и менее раз) изменения «структуры» или сигнатуры прослушиваемого шума. Временная структура импульсного зондирующего сигнала передатчика (ПРД) формируется так, что при детектировании полезного сигнала-отклика оператор слышит характерный клиппированный акустический сигнал.
В структурной схеме приемной части НРЛ обеспечивается сдвиг между частотой принимаемого сигнала и частотой гетеродина порядка 1…3 кГц. Выигрыш в чувствительности НРЛ обусловлен следующими положениями:
-130 dBm: уровень тепловых (собственных) шумов приемника (ПРМ) используемого НРЛ или уровень чувствительности ПРМ;
-120 dBm: порог +10 dBm по отношению к собственному шуму ПРМ, - уровень загорания первого светодиода СДИ ПУИ НРЛ;
-110 dBm: порог +20 dBm по отношению к собственному шуму ПРМ, уровень «загорания» 4-го светодиода СДИ ПУИ НРЛ - типовой порог обнаружения РВУ;
-135 dBm - уровень ниже собственного шума, где оператор на слух уже обнаруживает клиппированный тональный сигнал на фоне «стационарного» шума.
Таким образом, введение опции «Sound» позволяет увеличить «виртуальную» чувствительность НРЛ приблизительно на 25 dBm. Это по предварительной оценке должно приводить к увеличению дальности обнаружения РВУ не менее, чем на 50%.
НРЛ имеет два режима работы - «Поиск» и «Прослушивание».
Особенностью работы НРЛ в режиме «Поиск» является регистрация сигнала-отклика на частотах 2-й и 3-й гармоники ЗС на слух. Данный способ позволяет использовать особенность человеческого слуха по различению сигнала, уровень которого значительно ниже уровня шума. Оператор, при обнаружении объекта поиска, слышит тональные посылки длительностью 50 мс с периодом 250 мс, амплитуда которых (громкость звука в головных телефонах) пропорциональна уровню полезного сигнала на входе приемника. Изменение частоты тональных посылок возникающее при перемещении НРЛ относительно объекта поиска (эффект Доплера) воспринимается оператором как сигнал тревоги и не приводит к пропуску цели.
Режим «Прослушивание» применяется главным образом при дослеживании. При перемещении объекта поиска, работе его движущихся частей, и функционирующих электронных цепей сигнал-отклик от него приобретает амплитудно-фазовую модуляцию. Демодуляция такого сигнала-отклика с помощью линейного синхронного детектора позволяет сохранить характерные признаки модулирующего сигнала. Обученный оператор по этим признакам может идентифицировать обнаруженный объект, например, часовой механизм, сотовый телефон, др. В режиме «Прослушивание» НЛР излучает немодулированный ЗС.
Заявленный способ реализуется в устройстве подвижного комплекса на базе беспилотного летательного аппарата (БЛА) и состоит из навесного оборудования в составе: НРЛ, видеокамеры, GPS модуля, канала передачи данных и автономного пульта управления и отображения информации.
Структурная схема НРЛ для БЛА представлена на фиг. 1:


Приемник (ПРМ) НЛР состоит из следующих основных функциональных узлов: приемная антенная система 1; дуплексный фильтр 2; тракт второй гармоники 3, 4, 5, 6, 7; тракт третьей гармоники 0, 11, 12, 13, 14; опорный генератор 8; коммутатор 9; демодулятор 15, 16, 17, 18, 19, 20.
Дуплексный фильтр обеспечивает подавление ЗС и разделение сигнала-отклика на частоты его второй и третьей гармоник. Тракты 2-й и 3-й гармоник практически идентичны и особенностей не имеют.
На выходе трактов формируются сигналы ПЧ S2пч(t) и S3пч(t), соответствующие второй и третьей гармоникам, которые поступают на коммутатор 9. При обнаружении РВУ, как правило, регистрируется 2 гармоника ЗС, поэтому, по умолчанию, при включении питания, к демодулятору подключается выход тракта 2-й гармоники. При необходимости оператор с помощью радиопульта управления может изменить подключение.
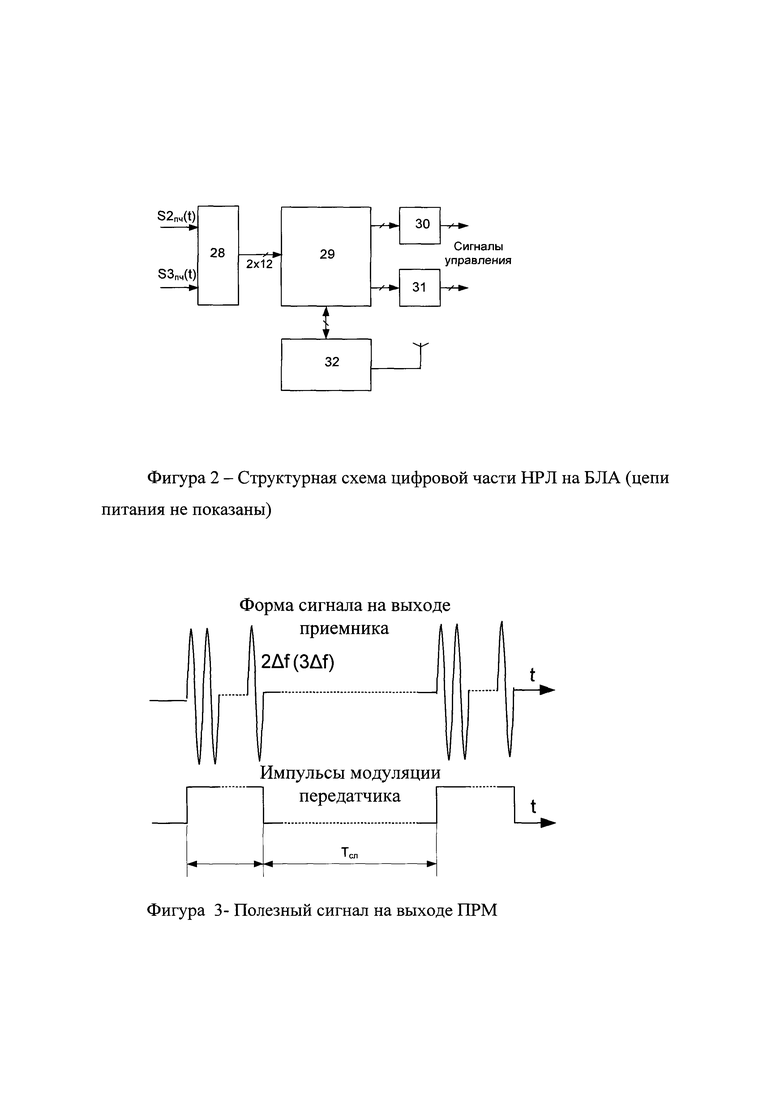
Структурная схема цифровой части НРЛ на БЛА (цепи питания не показаны), показана на фиг. 2, где:
28 - двухканальный аналого-цифровой преобразователь (АЦП); 29 - процессор; 30 - контроллер приемников; 31 - контроллер передатчика; 32 - радиопульт управления.
Также сигналы промежуточной частоты S2пч(t) и S3пч(t) поступают на вход двухканального АЦП 28 цифровой части НРЛ для БЛА. В процессоре 29 осуществляется их демодуляция и отображение значений амплитуд сигналов на светосигнальном индикаторе в логарифмическом масштабе. Амплитуда S2пч(t) соответствует амплитуде 2-й гармоники ЗС, S3пч(t) - 3-й гармоники ЗС. Демодуляция сигнала ПЧ осуществляется в квадратурном синхронном детекторе (КСД) 17.
Для пояснения процесса демодуляции рассмотрим частотный план приемника НРЛ для БЛА. В режиме «Поиск» в формирователе ЗС (26) из сигнала опорного генератора 8 синтезируется импульсно модулированный ЗС частотой Fзс:

где F_1=848 МГц.
Значение частоты ΔF выбирается в диапазоне единиц кГц. Частоты сигнала отклика для 2-й и 3-й гармоник ЗС:

После первого преобразования частоты на выходе преобразователей 5 и 12 формируются сигналы ПЧ частотой F_пч2=2⋅ΔF (тракт 2-й гармоники) и F_пч3=3⋅ΔF (тракт 3-й гармоники).
Процесс демодуляция показан на фиг. 3. Для выбранного сигнала (2-я или 3-я гармоника ЗС) гетеродин синхронного детектора 16, представляющий собой генератор прямого цифрового синтеза (DDS), генерирует опорные сигналы:
при демодуляции 2-й гармоник ЗС:

при демодуляции 3-й гармоники ЗС:

Таким образом, полезный сигнал на выходе КСД 17 представляет собой синусоиду частотой: 2Δf при приеме 2 гармоники ЗС, 3Δf при приеме 3 гармоники ЗС, модулированную по закону изменения ЗС. Типовое значение⋅Δf выбрано равным 500 Гц.
В режиме «Прослушивание» частота ЗС та же, что и в режиме «Поиск». Имеются следующие отличия:
- ЗС не модулирован (режим НГ);
- значение⋅Δf=0.
В этом случае выполняются тождества  . На выходе синхронного детектора формируется сигнал, обусловленный модуляцией сигнала отклика от цели. Квадратурные составляющие I и Q с выхода КСД поступают на сумматор 18, выходной сигнал, которого фильтруется и усиливается в устройстве 19 и поступает на вход ПРД радиоканала звука 20.
. На выходе синхронного детектора формируется сигнал, обусловленный модуляцией сигнала отклика от цели. Квадратурные составляющие I и Q с выхода КСД поступают на сумматор 18, выходной сигнал, которого фильтруется и усиливается в устройстве 19 и поступает на вход ПРД радиоканала звука 20.
Передатчик НЛР для БЛА состоит из следующих основных узлов: формирователь ЗС (26); управляемый аттенюатор передатчика (25); предварительный и выходной усилитель мощности (24), (23); ФНЧ (22); передающая антенна (21). Формирователь ЗС состоит из синтезатора сигнала частотой F_1=848 МГц, генератора прямого цифрового синтеза (DDS) сигнала частотой ΔF и квадратурного модулятора, который формирует ЗС частотой F_зс=F_1+ΔF. Управляемый аттенюатор (25) обеспечивает возможность регулировать мощность зондирующего сигнала. Предусмотрено 3 значения - максимальная, средняя и минимальная выходная мощность (шаг изменения составляет 6 дБ).
Усилители (24) и (23) обеспечивают заданную выходную мощность передатчика. Модуляция ЗС в режиме «Поиск» осуществляется путем коммутации цепей питания усилителей. Для питания выходного усилителя мощности используется повышающий преобразователь напряжения (27). ФНЧ (22) обеспечивает спектральную «чистоту» ЗС.
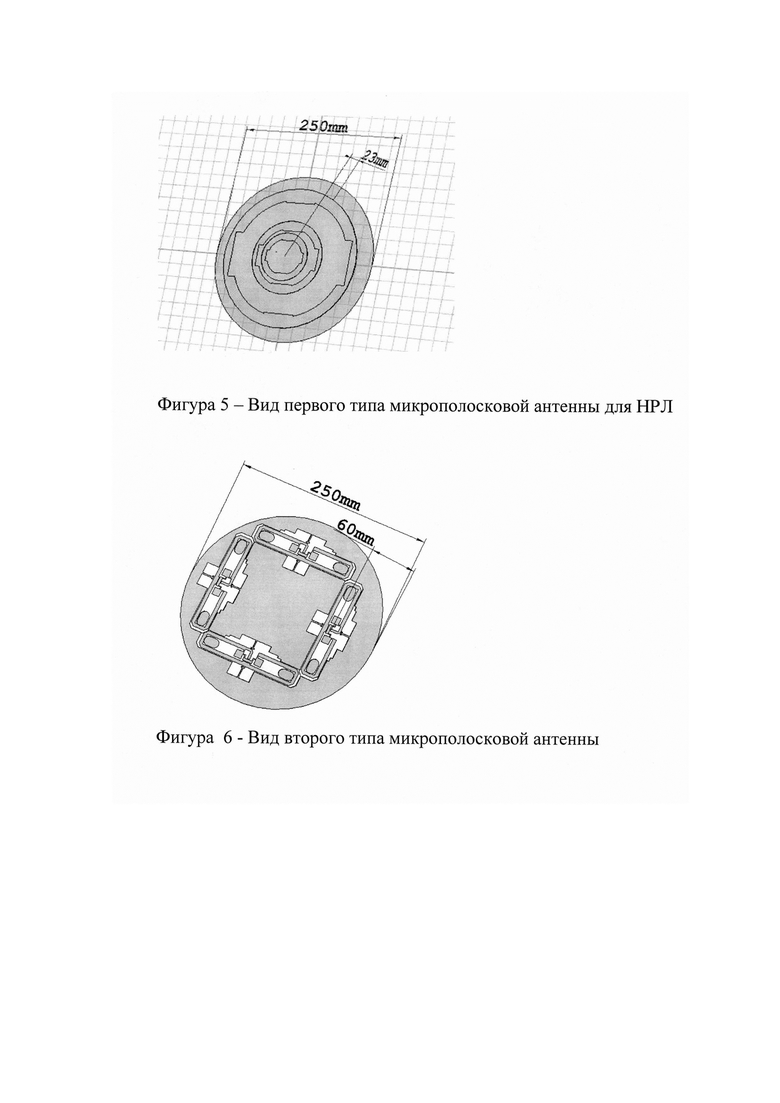
Особенностью предлагаемого мобильного комплекса является разработанная антенная система круговой поляризации двух типов.
Первый тип. Три микрополосковые антенны (на каждый рабочий диапазон частот), расположенные соосно. Снизу расположен излучатель нижней частоты, над ним излучатели второй и третей гармоник соответственно. Модель данного типа антенны с габаритными размерами приведена на фиг. 4.
На фиг. 5 показаны диаграмма направленности (ДН) коэффициента усиления антенны НРЛ (в дБ) в азимутальной плоскости для 3-х диапазонов частот (F1, F2, F3), изображен главный луч диаграммы направленности коэффициента усиления в азимутальной плоскости для 3-х диапазонов частот макетного образца антенны. Из него следует, что усиление микрополосковой антенны ниже, чем усиление решетки из 2-х линейных свернутых диполей на 1 дБ по передаче и на 1…2 дБ по приему.
В рамках натурного эксперимента к одному приемо-передающему устройству НРЛ поочередно подключались различные антенны в безэховой камере с использованием пробников 2-й и 3-й гармоник. Были получены результаты, приведенные в таблице. В рамках решаемой задачи разница получается не менее 3 дБ, что проиллюстрировано в таблице.

Преимущество данного типа антенны перед линейной дипольной состоит в том, что изделие не нужно вращать при работе, поскольку излучаются и принимаются волны с любой поляризацией. Другим преимуществом является применение 2-х раздельных фильтров перед ПРМ, а не диплексора, как в случае с линейным типом антенны. Конструктивно сборка данного типа антенн проще, чем у линейной дипольной антенны, а высота почти в три раза ниже.
Второй тип. В процессе разработки НРЛ нового типа был предложен вариант (тип) антенны с круговой поляризацией, но с большим усилением передающей антенны. Конструкция данной антенны представляет собой две взаимно ортогональные пары свернутых диполей. Вид данной антенны приведен на фиг. 6.
Такое взаимное расположение обеспечивает наличие ортогональных мод и при квадратурном сложении сигналов от этих антенн можно получить антенну с круговой поляризацией и с усилением не менее чем у линейного типа излучателя. Диаграмма направленности (коэффициент усиления) этой антенны приведена на фиг. 7.
Добавление 2-х расположенных ортогонально свернутых диполей не добавляет усиления линейному типу излучателя, однако удается получить круговую поляризацию с коэффициентом эллиптичности, как у микрополосковой антенны.
Приведенные конструктивные характеристики предлагаемого изобретения увеличивают обзорность, и дальность обнаружения РВУ, что позволяет эффективно вести поиск РВУ на достаточном безопасном расстоянии с применением БЛА.
Литература:
1. Дикарев В.И. Методы и средства обнаружения объектов в укрывающих средах / В.И. Дикарев, В.А. Заренков, Д.В. Заренков. - СПб.: Наука и Техника, 2004. - 280 с.
2. Переносной детектор нелинейных переходов «NR-900EK» / Руководство по эксплуатации. ЮТДН 268 165 003 РЭ. - М.: ЗАО «Группа защиты - ЮТТА».
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР С ЦЕЛЕУКАЗАТЕЛЕМ | 2011 |
|
RU2474840C2 |
| НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР С ЛАЗЕРНЫМ ЦЕЛЕУКАЗАТЕЛЕМ И ЧАСТОТНЫМ ДАЛЬНОМЕРОМ | 2014 |
|
RU2572812C2 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| ИМПУЛЬСНЫЙ НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2499277C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ С НЕЛИНЕЙНЫМИ МАРКЕРАМИ | 2015 |
|
RU2595775C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ НЕПОДВИЖНЫХ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ | 2018 |
|
RU2696006C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОИСКА, СОДЕРЖАЩИХ МЕТАЛЛИЧЕСКИЕ КОНТАКТЫ, В НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2614038C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ ВЫСОТЫ ОБЪЕКТА ПОИСКА В ОБЗОРНЫХ НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ | 2013 |
|
RU2530542C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2012 |
|
RU2501035C1 |



Настоящее изобретение относится к области радиолокации, в частности к радиолокационным системам (РЛС) ближней радиолокации, в которых нелинейные радиолокаторы (HPЛ) осуществляют поиск объектов, содержащих активные радиоэлементы. Техническим результатом изобретения является увеличение дальности обнаружения радиолокационных взрывных устройств (РВУ). Способ обнаружения РВУ с применением беспилотного летательного аппарата (БЛА) заключается в генерации и излучении в направлении РВУ 2-х гармонических сигналов S1 и S2 с частотами f1 и f2 соответственно, приеме отраженного сигнала, синхронном детектировании принимаемого сигнала с помощью опорного колебания S0 частоты f0 и принятии решения об обнаружении нелинейно-рассеивающего объекта путем сравнения выходного сигнала синхронного детектора с порогом. Обнаружение РВУ осуществляется в двух режимах: «поиска» и «прослушивания». В режиме «поиска» объект поиска облучается НРЛ, а сигнал-отклик регистрируется оператором с помощью головных телефонов на слух. В режиме «прослушивания» НЛР излучает в сторону объекта поиска модулированный сигнал, временная структура которого в передатчике формируется так, что при детектировании полезного сигнала-отклика оператор слышит характерный клиппированный акустический сигнал. При этом в приемной части НРЛ обеспечивается сдвиг между частотой принимаемого сигнала и частотой гетеродина порядка 1…3 кГц, и сигнал-отклик приобретает амплитудно-фазовую модуляцию. Посредством линейного синхронного детектора осуществляется демодуляция сигнала-отклика, с сохранением характерных признаков модулированного сигнала-отклика и отображением значений амплитуд сигналов на светосигнальном индикаторе в логарифмическом масштабе, по которым оператор идентифицирует объект поиска. Устройство для реализации способа состоит из навесного оборудования БЛА, состоящего из НРЛ, видеокамеры, GPS модуля, канала передачи данных и автономного пульта управления и отображения информации. НЛР состоит из передатчика, антенной системы, дуплексного фильтра, приемника в составе тракта второй гармоники, тракта третьей гармоники, опорного генератора, коммутатора, демодулятора; цифрового модуля в составе двухканального АЦП, процессора, контроллера приемника, контроллера передатчика, радиопульта управления. В НРЛ используется антенная система круговой поляризации, содержащая три микрополосковые антенны на каждый рабочий диапазон частот. 2 н. и 1 з.п. ф-лы, 7 ил., 1 табл.
1. Способ обнаружения радиоуправляемых взрывных устройств (РВУ) с применением беспилотного летательного аппарата, заключающийся в генерации 2-х гармонических сигналов S1 и S2 с частотами f1 и f2 соответственно, излучении в направлении РВУ 2-х зондирующих сигналов, приеме отраженного сигнала, синхронном детектировании принимаемого сигнала с помощью опорного колебания S0 частоты f0 и принятии решения об обнаружении нелинейно-рассеивающего объекта путем сравнения в пороговой схеме мощности выходного сигнала синхронного детектора с порогом, отличающийся тем, что обнаружение РВУ осуществляется в двух режимах «поиска» и «прослушивания», в режиме «поиска» объект исследования облучается нелинейным радиолокатором (НРЛ) зондирующим сигналом, а сигнал-отклик регистрируется оператором с помощью головных телефонов на слух, при этом используется особенность человеческого слуха по различению сигнала, уровень которого значительно ниже уровня шума, и который воспринимается оператором как тональный посыл, амплитуда которого пропорциональна уровню полезного сигнала на входе приемника, а частота тональных посылов находится в зависимости от перемещения НРЛ относительно объекта поиска; в режиме «прослушивания» НЛР излучает в сторону объекта поиска модулированный сигнал, временная структура которого в передатчике (ПРД) формируется так, что при детектировании полезного сигнала-отклика оператор слышит характерный клиппированный акустический сигнал, при этом в приемной части НРЛ обеспечивается сдвиг между частотой принимаемого сигнала и частотой гетеродина порядка 1…3 кГц, и сигнал-отклик приобретает амплитудно-фазовую модуляцию, обусловленную модуляцией сигнала от объекта поиска, с помощью линейного синхронного детектора осуществляется демодуляция такого сигнала-отклика, с сохранением характерных признаков модулированного сигнала-отклика и отображением значений амплитуд сигналов на светосигнальном индикаторе в логарифмическом масштабе, по которым оператор идентифицирует объект поиска.
2. Устройство для реализации способа по п. 1, состоящее из навесного оборудования, установленного на беспилотном летательном аппарате (БЛА), состоящего из НРЛ, видеокамеры, GPS модуля, канала передачи данных и автономного пульта управления и отображения информации; НЛР состоит из передатчика, антенной системы, дуплексного фильтра, приемника в составе тракта второй гармоники, тракта третьей гармоники, опорного генератора, коммутатора, демодулятора; цифрового модуля в составе двухканального АЦП, процессора, контроллера приемника, контроллера передатчика, радиопульта управления, отличающееся тем, что в НРЛ используется антенная система круговой поляризации, содержащая три микрополосковые антенны на каждый рабочий диапазон частот, расположенные соосно - снизу расположен излучатель нижней частоты, над ним излучатели второй и третей гармоник соответственно.
3. Устройство по п. 2, отличающееся тем, что антенная система с круговой поляризацией представляет собой две взаимно ортогональные пары свернутых диполей.
| Способ получения мебельного лака | 1960 |
|
SU139761A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОСКОЛОЧНЫХ ВЗРЫВНЫХ УСТРОЙСТВ | 2013 |
|
RU2601667C2 |
| ИМПУЛЬСНЫЙ НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2499277C1 |
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ С ПОЛУПРОВОДНИКОВЫМИ ЭЛЕМЕНТАМИ | 2010 |
|
RU2432583C1 |
| РАДИОКОМПЛЕКС РОЗЫСКА МАРКЕРОВ | 1994 |
|
RU2108596C1 |
| УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2017 |
|
RU2660391C1 |
| НЕЛИНЕЙНЫЙ ЛОКАТОР УСТРОЙСТВ НЕСАНКЦИОНИРОВАННОГО СЪЕМА РЕЧЕВОЙ И ВИЗУАЛЬНОЙ ИНФОРМАЦИИ | 2015 |
|
RU2571532C1 |
| ТКАЧ В.Н., ПАРФЕНЦЕВ И.В., ЗВЕЖИНСКИЙ С.С | |||
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |

