1. ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к устройству обработки изображения, способному определять проведение процесса управления частотой кадров, в частности, оно относится к обнаружению процесса управления частотой кадров.
2. УРОВЕНЬ ТЕХНИКИ
[0002] В Патентном Документе 1 (см. Фиг. 19) раскрывается процесс обнаружения области движущегося изображения, включающий обнаружение области движущегося изображения в части одного экрана.
[0003] В Патентном Документе 2 раскрывается процесс управления частотой кадров (ниже именуемый «процесс УЧК») как способ управления градацией отображения жидкокристаллического дисплея. Этот процесс УЧК включает псевдо-отображение промежуточно отрегулированной яркости, путем отображения различных градаций яркости в каждом кадре по очереди.
ДОКУМЕНТЫ, СООТВЕТСТВУЮЩИЕ ПРЕДШЕСТВУЮЩЕМУ УРОВНЮ ТЕХНИКИ ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0004] Патентный Документ 1: Патент Японии №4980486, Патентный Документ 2: Публикация патентной заявки Японии №2002-287709
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
[0005] В изображении, которое прошло вышеуказанный процесс УЧК, когда выполняется обнаружение области движущегося изображения, есть опасность, что области неподвижного изображения будут ошибочно распознаны как области движущегося изображения. Это объясняется тем, что, в соответствии с процессом УЧК, значения пикселей меняются в каждом кадре даже в тех частях, которые являются областями неподвижного изображения.
[0006] Эта проблема возникает не только тогда, когда путаются движущиеся неподвижные области изображения, но также в случаях, когда производится последующая обработка после процесса УЧК, как описывается ниже.
[0007] Например, в случае, когда область распознается как область текста и коррекция контуров или подобная операция производится на областях, отличных от текстовых, на экране необходимо определить текстовые области, которые не являются областями изображения. В этом случае при использовании вышеупомянутого процесса УЧК есть опасность, что текстовые области будут распознаны как области движущегося изображения, т.е. области изображения.
[0008] Кроме того, если после процесса УЧК выполняется процесс устранения шума, есть опасность, что изменение значений пикселей, вызванное процессом УЧК, будет распознано как шум и устранено.
[0009] Цель настоящего изобретения - решить описанные выше проблемы и создать устройство определения процесса УЧК, способное определить, выполняется ли процесс УЧК, и произвести последующую обработку изображения с использованием результатов этого определения. Кроме того, цель настоящего изобретения - создать устройство обработки изображения, которое выполняет обработку изображения с использованием результатов обнаружения выполненного процесса УЧК.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0010] (1) В соответствии с настоящим изобретением, предлагается устройство обработки изображения, включающее средство обнаружения области движения в предыдущем кадре, которое обнаруживает область движения в предыдущем кадре; средство обнаружения области движения в последующем кадре, которое обнаруживает область движения в последующем кадре, расположенном после предыдущего кадра; средство определения, которое, если сдвиг между областью движения предыдущего кадра и областью движения последующего кадра меньше порогового значения сдвига области или равен ему, определяет, что выполняется процесс управления частотой кадров, и выдает команду изменения параметра для изменения порогового значения параметра обработки изображения; и средство обработки изображения, которое, по получении команды изменения параметра, изменяет пороговое значение параметра обработки изображения. Это позволяет определить, выполняется ли процесс управления частотой кадров, с помощью сдвига областей движения, и выполнить соответствующую окончательную обработку изображения после процесса управления частотой кадров.
[0011] (2) В устройстве обработки изображения, соответствующем настоящему изобретению, средство определения обнаруживает, что выполняется процесс управления частотой кадров, когда определение сдвига производится повторно множество раз для последовательности кадров. Соответственно, точное определение можно осуществить, даже если присутствует шум.
[0012] (3) В устройстве обработки изображения, соответствующем настоящему изобретению, область движения каждого кадра образуется блоками, каждый из которых состоит из множества пикселей. Соответственно, в памяти кадров нет необходимости.
[0013] (4) В устройстве обработки изображения, соответствующем настоящему изобретению, средство обработки изображения представляет собой средство определения прямоугольной области движения, которое, по получении команды изменения параметра, производит изменение, увеличивая пороговое значение параметра обработки изображения, для определения области движения. Соответственно, даже когда выполняется процесс управления частотой кадров, можно эффективно проводить процесс обнаружения прямоугольной области движения.
[0014] (5) В устройстве обработки изображения, соответствующем настоящему изобретению, средство обработки изображения представляет собой средство обнаружения текстовой области, которое, по получении команды изменения параметра, производит изменение, уменьшая пороговое значение параметра обработки изображения, для определения текстовой области. Соответственно, даже когда выполняется процесс управления частотой кадров, можно эффективно проводить процесс обнаружения текстовой области.
[0015] (6) В устройстве обработки изображения, соответствующем настоящему изобретению, средство обработки изображения представляет собой средство устранения шума, которое, по получении команды изменения параметра, производит изменение, увеличивая пороговое значение параметра обработки изображения, для определения шума. Соответственно, даже когда выполняется процесс управления частотой кадров, можно эффективно проводить процесс устранения шума.
[0016] (7) В соответствии с настоящим изобретением, предлагается устройство для обнаружения прямоугольной области движения, включающее средство обнаружения прямоугольной области движения, которое обнаруживает прямоугольную область движения по получении данных изображения каждого из множества кадров, причем устройство для обнаружения прямоугольной области движения включает средство определения, которое обнаруживает предыдущую прямоугольную область движения в предыдущем кадре и последующую прямоугольную область движения в последующем кадре, который расположен после предыдущего кадра, и когда сдвиг между прямоугольной областью движения предыдущего кадра и прямоугольной областью движения последующего кадра меньше порогового значения сдвига областей или равен ему, определяет, что выполняется процесс управления частотой кадров и выдает команду изменения параметра для изменения порогового значения параметра обработки изображения; и средство предоставления данных, которое снабжает средство определения данными об изображении для части кадров из их множества. Обнаружение областей движения в кадре средством определения выполняется с большей точностью, чем определение прямоугольной области движения средством обнаружения прямоугольной области движения. Соответственно, можно обнаруживать процесс управления частотой кадров без увеличения вычислительной нагрузки процесса определения прямоугольной области при окончательной обработке.
[0017] (8) В соответствии с настоящим изобретением, предлагается устройство для обнаружения процесса управления частотой кадров, включающее средство обнаружения прямоугольной области движения в кадре, которое обнаруживает прямоугольную область движения в каждом из множества кадров по получении данных об изображении для множества кадров; и средство определения, которое, когда сдвиг между прямоугольной областью движения предыдущего кадра, обнаруженной средством обнаружения прямоугольной области движения кадра, и прямоугольной областью движения последующего кадра, который расположен после предыдущего кадра, меньше порогового значения сдвига областей или равен ему, определяет, что выполняется процесс управления частотой кадров, и выдает команду изменения параметра для изменения порогового значения параметра обработки изображения. Таким образом, можно определить, выполняется ли процесс управления частотой кадров, используя сдвиг областей движения.
[0018] В данном описании изобретения термины «предыдущий кадр» и «последующий кадр», очевидно, включают кадры, которые идут непрерывно, и могут также включать кадры, связанные друг с другом предшествованием либо следованием. Термин «процесс управления частотой кадров» включает, по крайней мере, все типы временных процессов управления частотой кадров.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
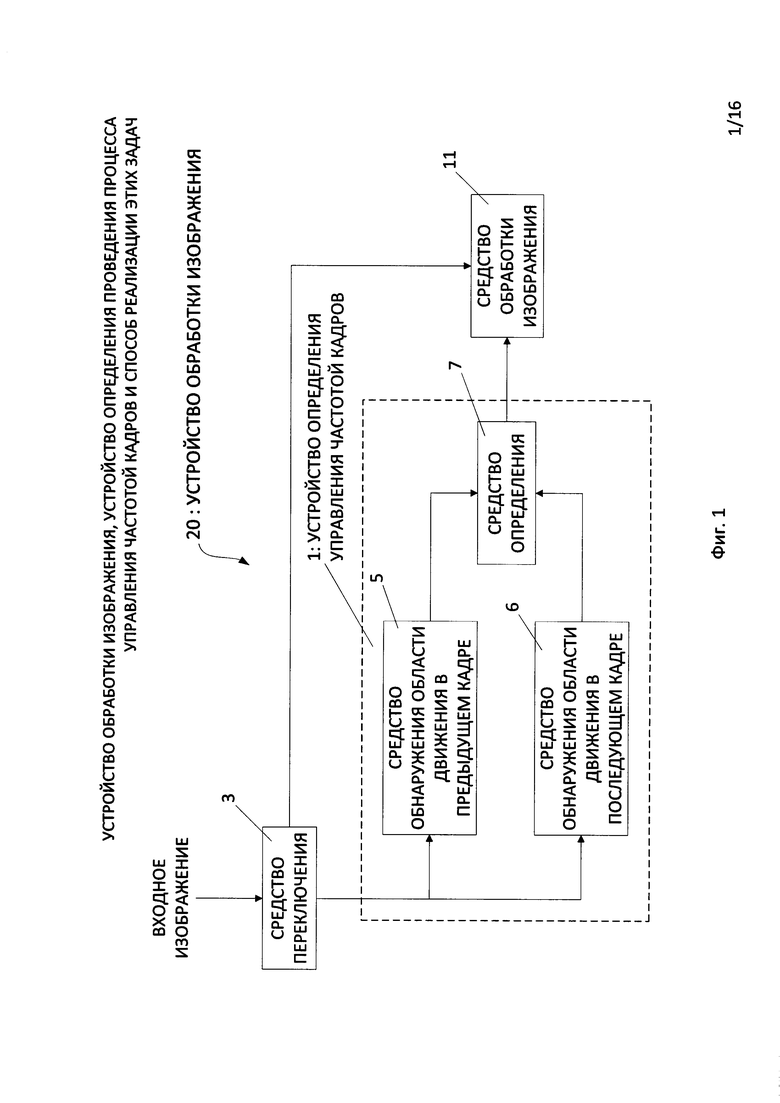
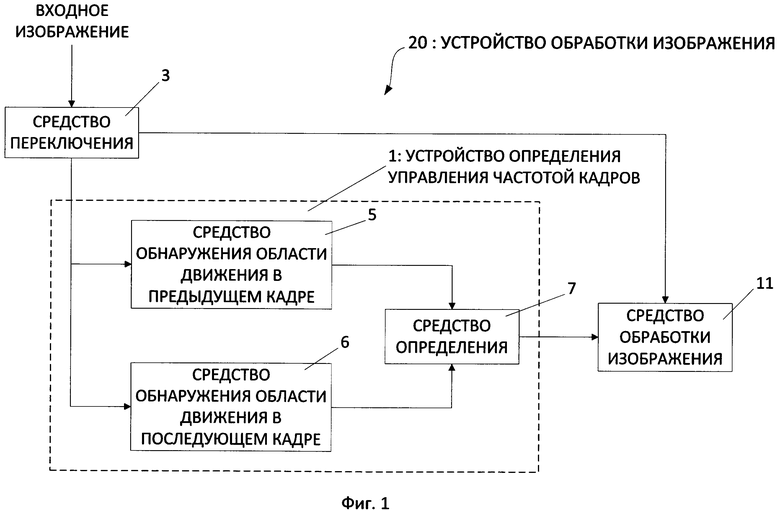
[0019] Фиг. 1 - функциональные блоки устройства обработки изображения 20.
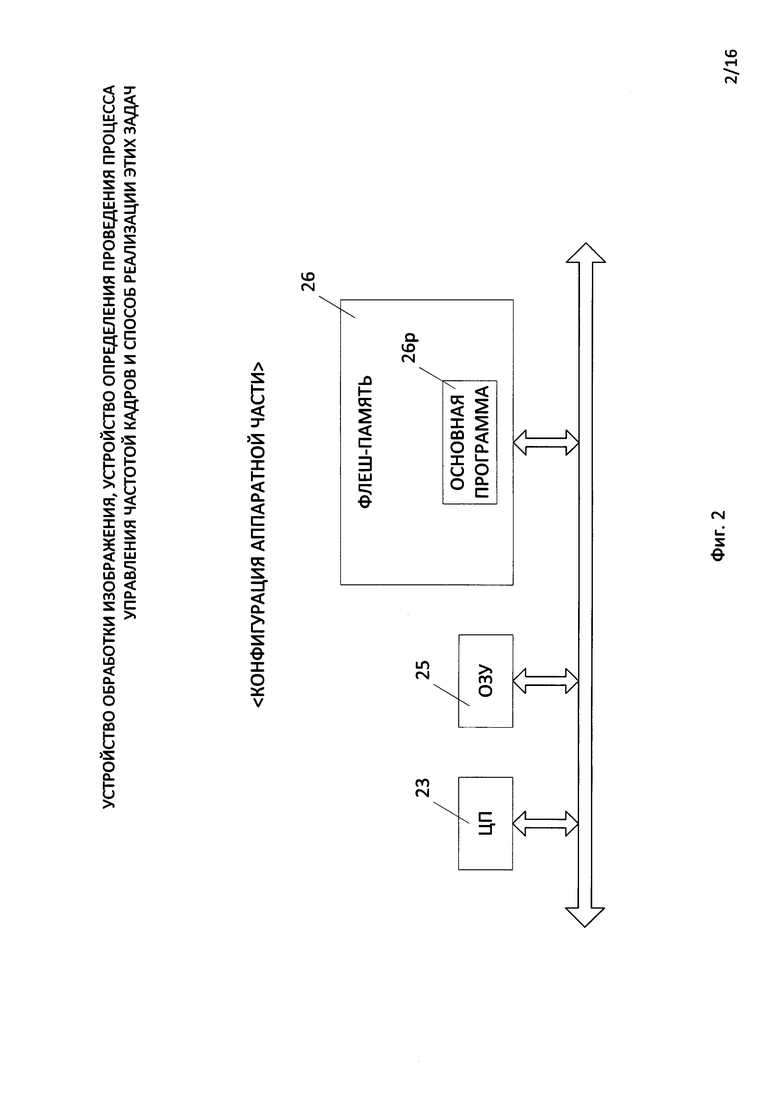
Фиг. 2 - пример конфигурации аппаратной части в случае, когда устройство обработки изображения 20 сформировано с использованием центрального процессора.
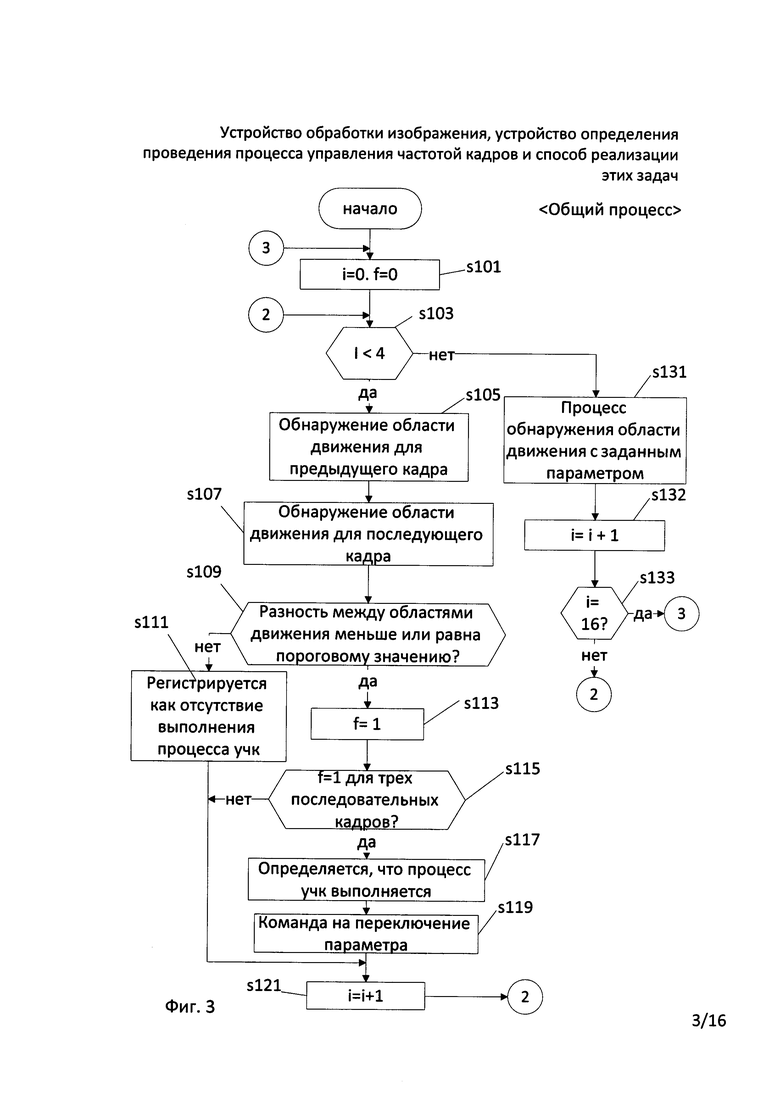
Фиг. 3 - общая блок-схема процесса.
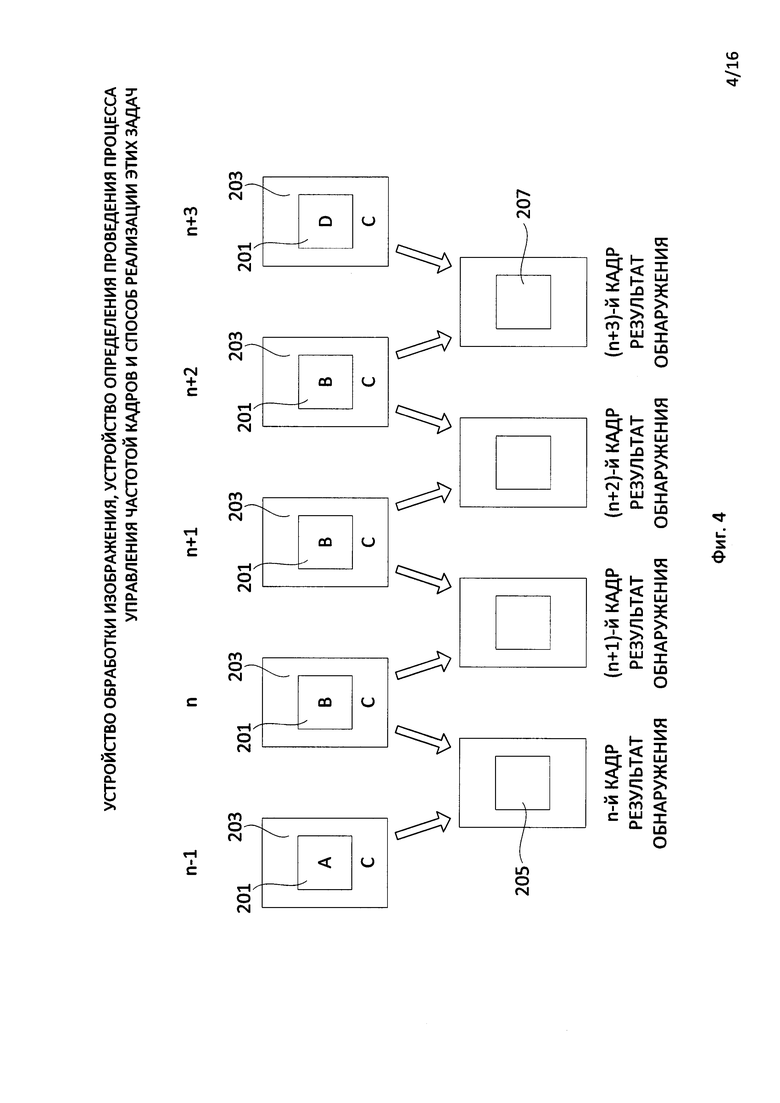
Фиг. 4 - результаты обнаружения в случае, когда процесс УЧК не выполняется.
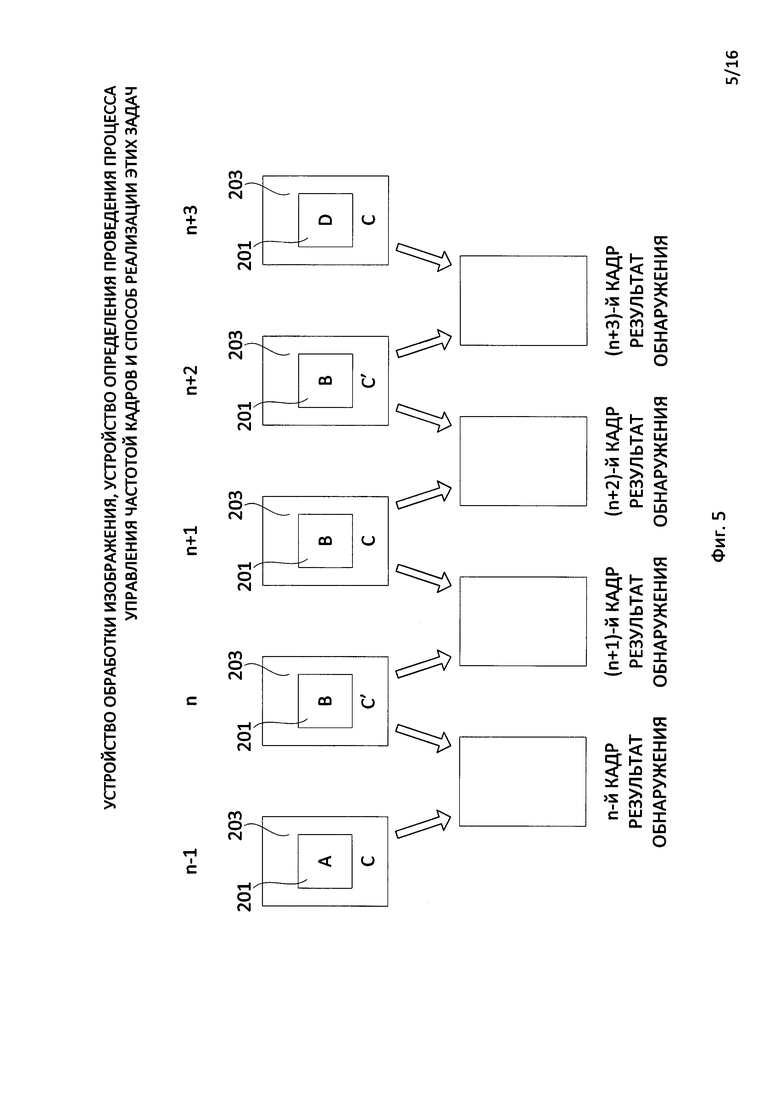
Фиг. 5 - результаты обнаружения в случае, когда процесс УЧК выполняется.
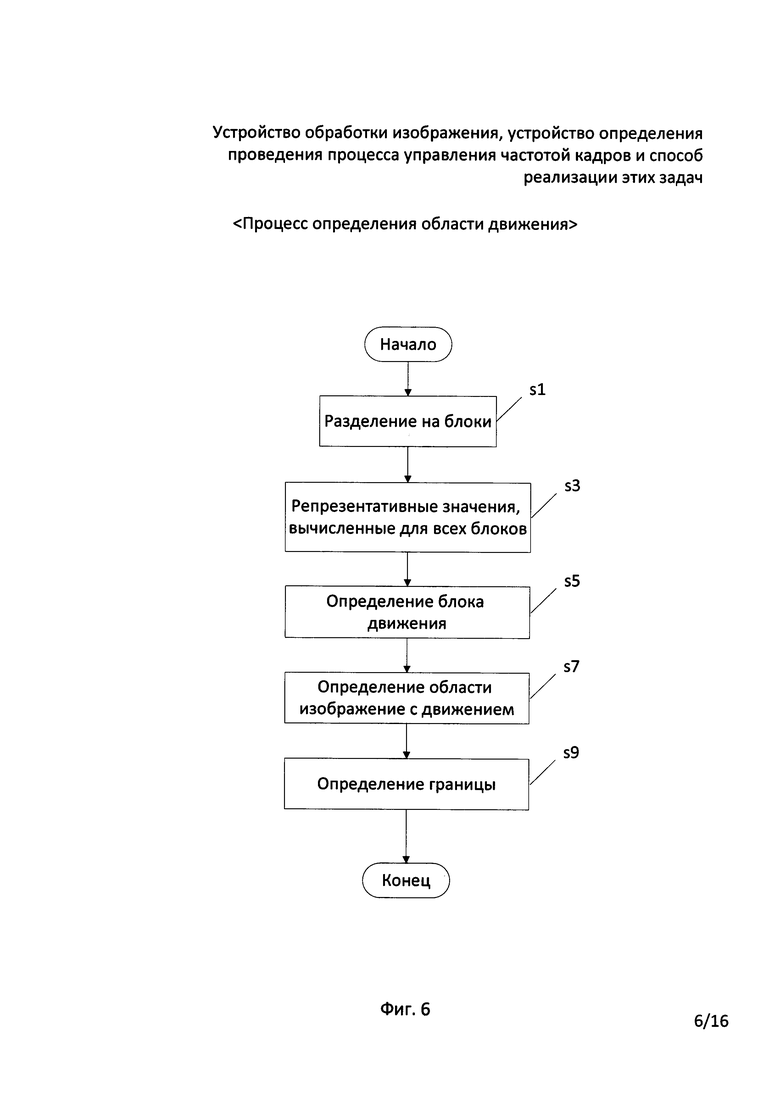
Фиг. 6 - подробная блок-схема процесса определения области изображения с движением, иллюстрирующая шаги S105 и S107 на Фиг. 3.
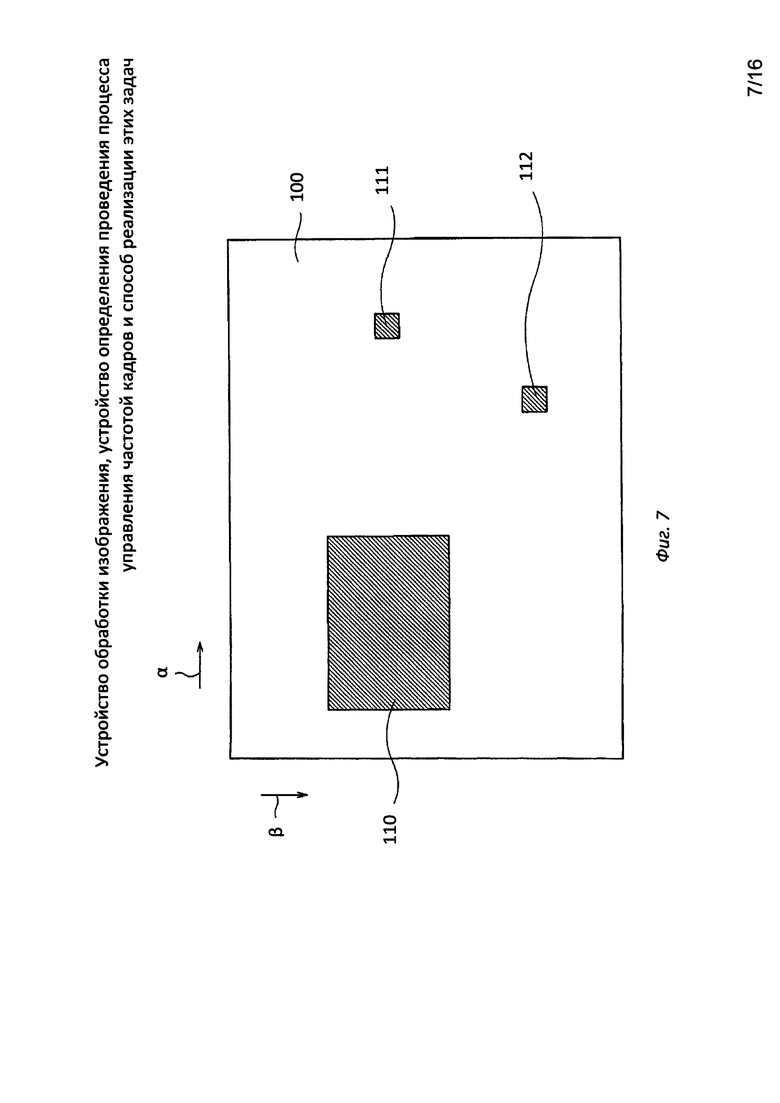
Фиг. 7 - область отображения 100, содержащая области движения изображения 110-112.
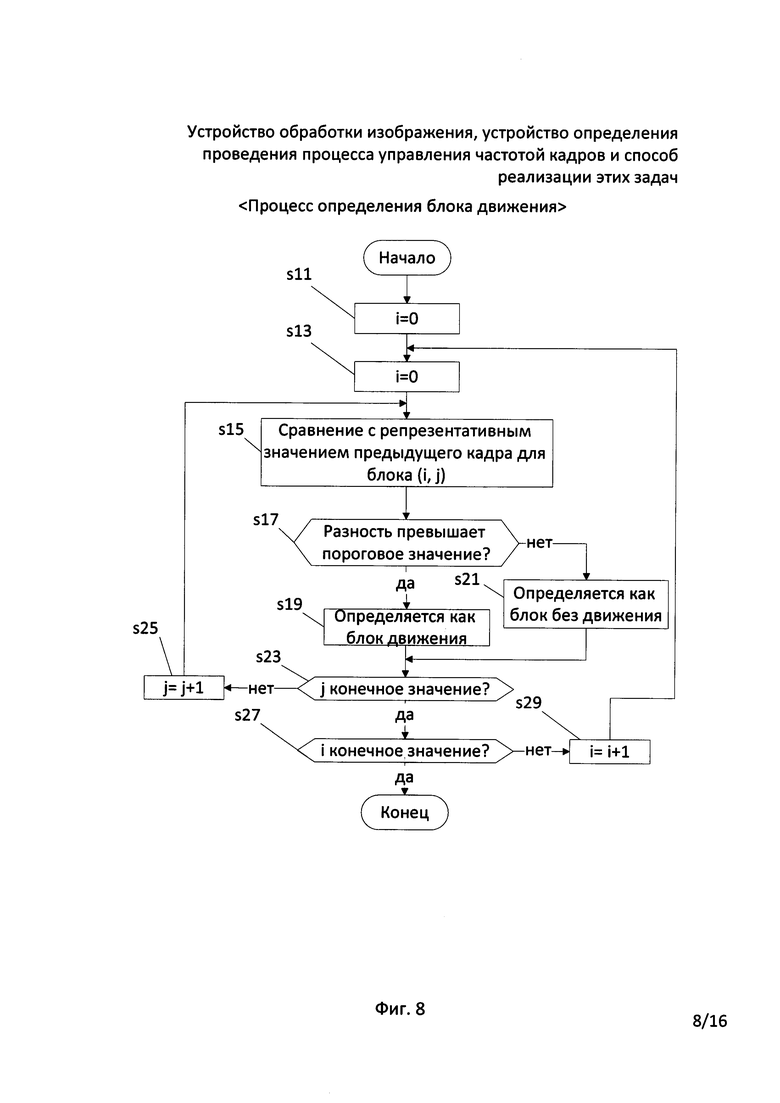
Фиг. 8 - блок-схема процесса определения блоков движения.
Фиг. 9 - результаты, полученные при обнаружении блоков движения.
Фиг. 10 - блок-схема процесса определения области движения изображения.
Фиг. 11 - блоки столбцов движения.
Фиг. 12 - продолжение блок-схемы процесса определения области движения изображения.
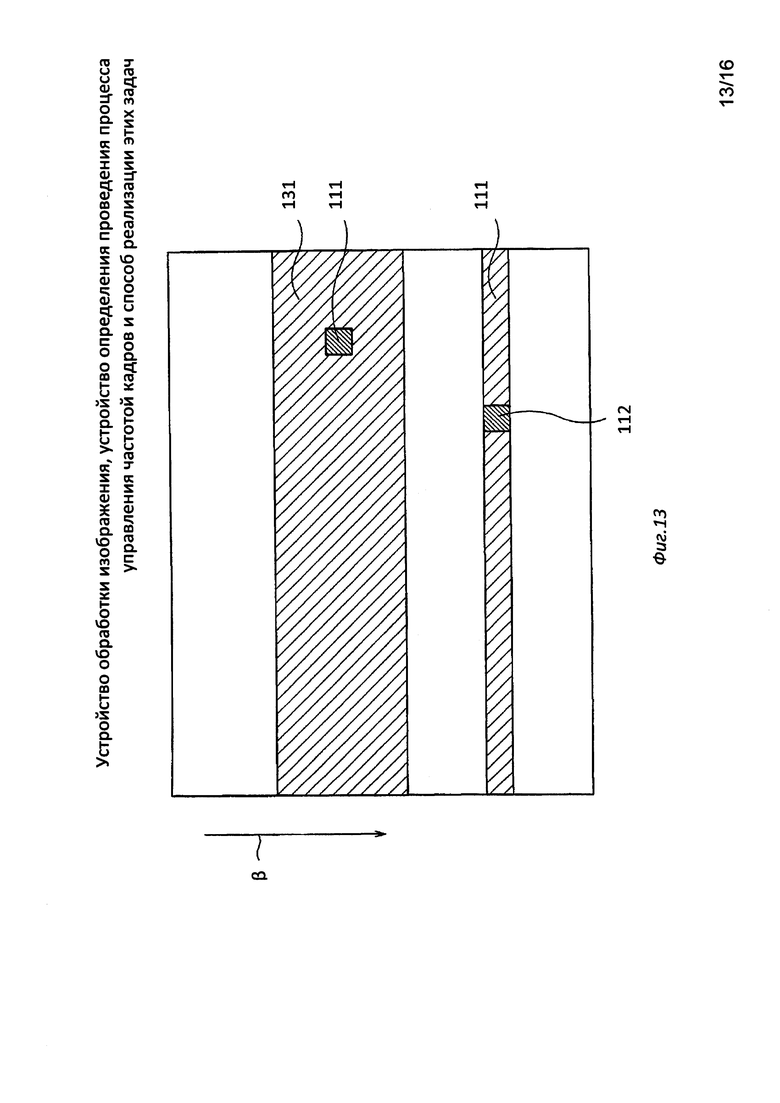
Фиг. 13 - блоки строк движения.
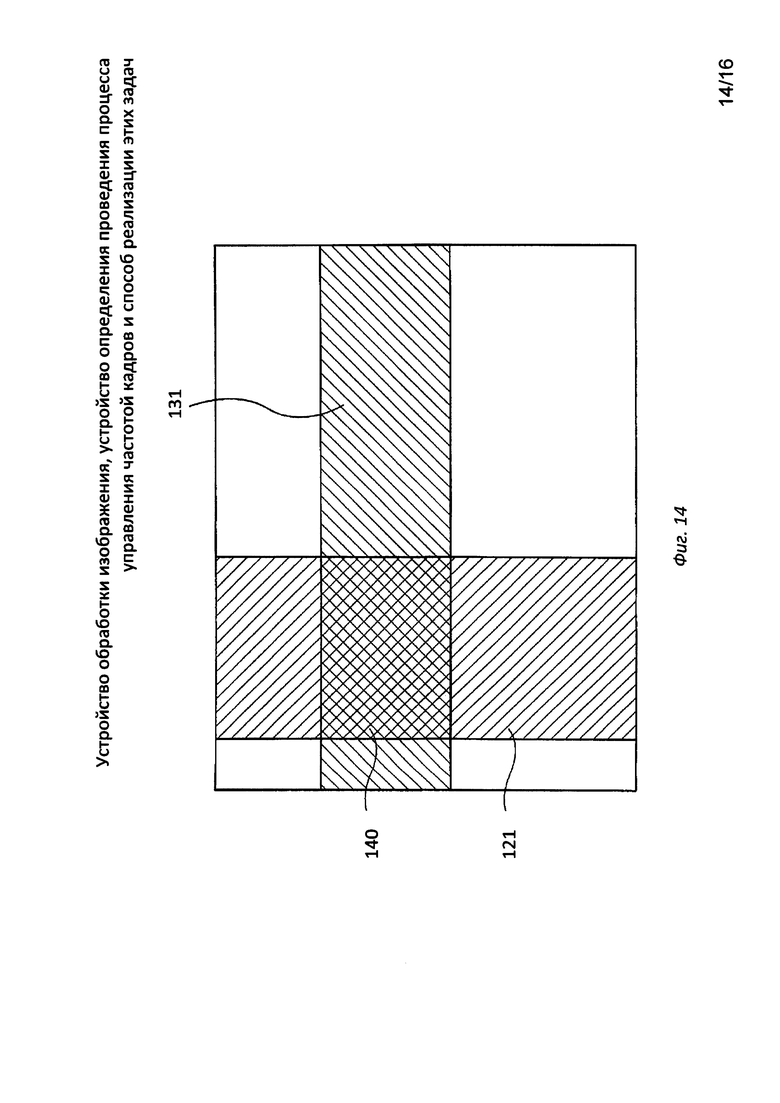
Фиг. 14 - область движения изображения 140.
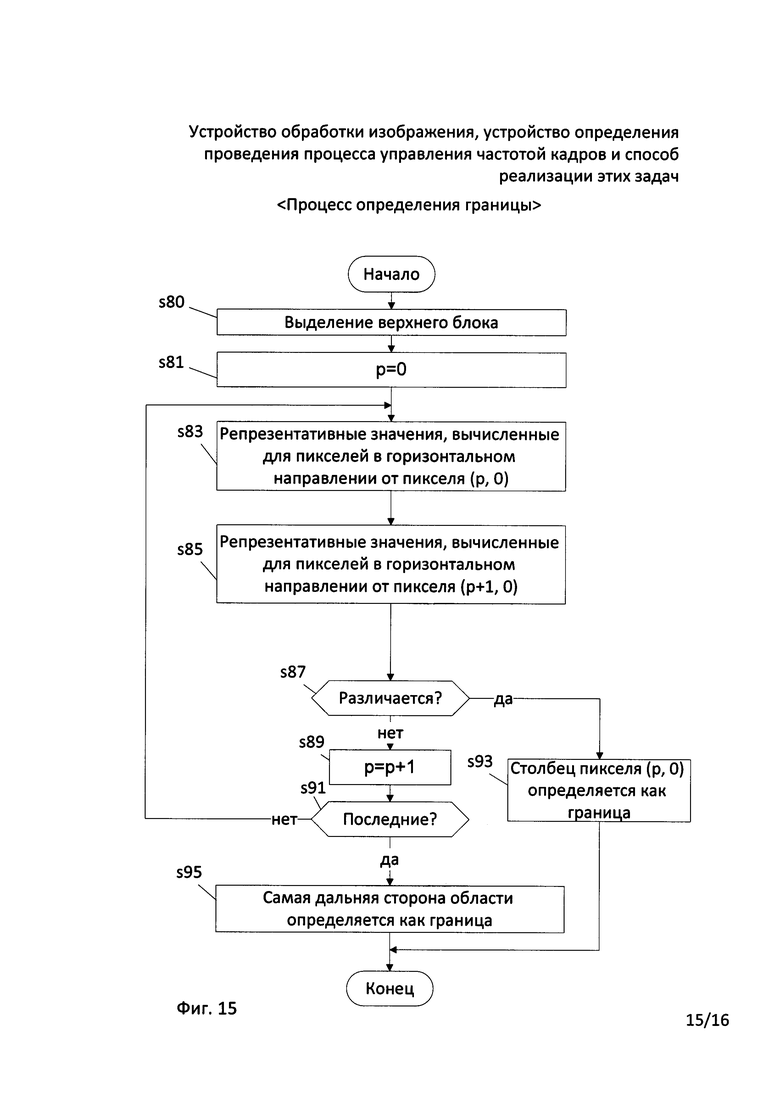
Фиг. 15 - блок-схема процесса определения границ.
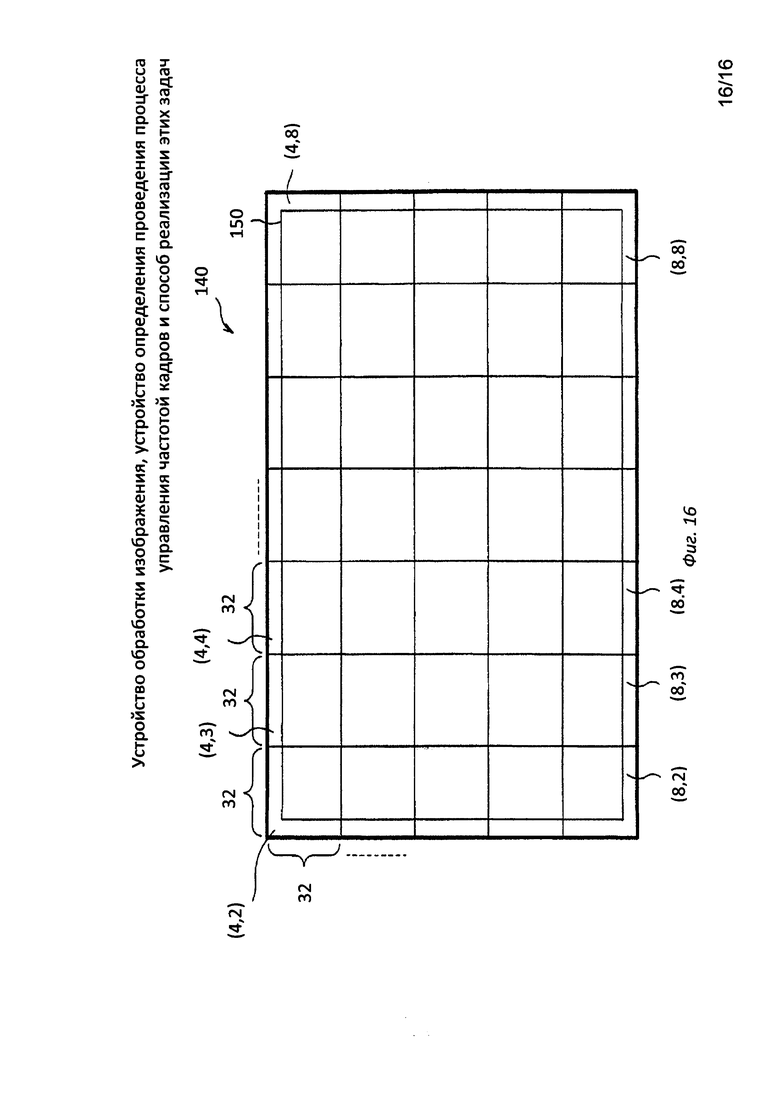
Фиг. 16 - расположение 32×32 бита в одном блоке.
ОПИСАНИЕ ПРИМЕРОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
[0020] Ниже описываются некоторые варианты воплощения изобретения со ссылками на чертежи.
[0021] (1.1 Функциональные блоки)
На Фиг. 1 показаны функциональные блоки устройства обработки изображения 20, включающие устройство определения процесса управления частотой кадров (здесь и далее именуемого «процессом УЧК») 1, соответствующее первому варианту осуществления настоящего изобретения. Устройство обработки изображения 20 включает устройство определения процесса УЧК 1, средство переключения 3 и средство обработки изображения 11.
[0022] Устройство определения процесса УЧК 1 включает средство обнаружения области движения предыдущего кадра 5, средство обнаружения области движения последующего кадра 6 и средство определения 7. Средство обнаружения области движения предыдущего кадра 5 обнаруживает область движения предыдущего кадра в предыдущем кадре. Средство обнаружения области движения последующего кадра 6 обнаруживает область движения последующего кадра в последующем кадре, который расположен после предыдущего кадра. Средство определения 7 определяет, что проводится процесс управления частотой кадров, если сдвиг между областью движения предыдущего кадра и областью движения последующего кадра меньше или равен пороговому значению сдвига областей, и выдает команду изменения параметра для изменения порогового значения параметра обработки изображения.
[0023] Средство переключения 3 предоставляет устройству определения процесса УЧК 1 часть кадров входного изображения, а также предоставляет средству обработки изображения 11 остальные кадры входного изображения. По получении команды изменения параметра средство обработки изображения изменяет пороговое значение параметра обработки изображения и производит обработку предоставленного ему входного изображения.
[0024] (1.2 Конфигурация аппаратной части)
На Фиг. 2 показана конфигурация аппаратуры устройства обработки изображения 20. Устройство обработки изображения 20 включает центральный процессор (ЦП) 23, оперативное запоминающее устройство (ОЗУ) 25 и флеш-память 26. Во флеш-памяти 26 хранится программа 26р. Программа 26р содержит программу, которая принимает определение процесса УЧК и результаты этого определения и выполняет обработку изображения, как описывается ниже. В ОЗУ 25 хранятся результаты вычислений и тому подобное.
[0025] ЦП 23 определяет, выполняется ли процесс УЧК на основе значений пикселей, образующих область отображения, хранящуюся в памяти, и сохраняет результаты в ОЗУ 25 в соответствии с программой 26р.
[0026] (1.3 Описание блок-схемы процесса) Ниже описывается случай, когда при выполнении процесса обработки изображения средством обработки изображения 11 (см. Фиг. 1) обнаруживается прямоугольная область движения.
[0027] Процесс, выполняемый в соответствии с программой 26р, показанной на Фиг. 2, описывается с помощью Фиг. 3. Как показано на Фиг. 4, ниже описывается случай, в котором фоновая часть 203 представляет собой неподвижное изображение С, в части одного кадра имеется прямоугольная область движущегося изображения 201, и чтобы отобразить данные движущегося изображения при частоте кадров 16 к/с на мониторе с частотой кадров 60 к/с, между кадрами с (n-1)-го по (n+3)-й вставляется изображение, аналогичное n-му кадру, в качестве (n+1)-го кадра и (n+2)-го кадра. Ниже описывается пример, когда при вышеуказанных условиях процесс УЧК не выполняется, и пример, когда при вышеуказанных условиях процесс УЧК выполняется.
[0028] (1.3.1 Случай, когда процесс УЧК не выполняется)
Случай, когда процесс УЧК не выполняется, показан на Фиг. 4.
[0029] ЦП 23 инициализирует номер кадра для обработки i и флаг кандидата на процесс УЧК f (шаг S101 на Фиг. 3). ЦП 23 определяет, удовлетворяет ли номер кадра для обработки i условию i<4 (шаг S103). В данном случае i=0, и поэтому область движения обнаруживается для предыдущего кадра (шаг S105). Обнаружение области движения в каждом кадре можно производить с помощью известного метода обнаружения. В данном варианте изобретения используется метод обнаружения прямоугольной области движения, описываемый ниже. Как показано на Фиг. 4, область движения 205 получают как результат обнаружения n-го кадра из (n-1)-го кадра и n-го кадра.
[0030] Затем ЦП 23 обнаруживает область движения последующего кадра (шаг S107 на Фиг. 3). Метод обнаружения такой же, как и в шаге S103. В данном случае n-й кадр и (n+1)-й кадр представляют собой одно и то же изображение, поэтому разность между ними нулевая. Соответственно, область движения не обнаруживается.
[0031] ЦП 23 определяет, является ли разность между областью движения предыдущего кадра и областью движения последующего кадра равной пороговому значению или меньшей его (шаг S109). Для этого определяется, является ли сдвиг между граничными линиями областей движения в результате обнаружения для n-го кадра и результате обнаружения для (n+1)-го кадра равным пороговому значению или меньшим его. Другими словами, это определение производится на основе сдвигов положения и размеров областей движения.
[0032] В этом случае результат обнаружения показывает отсутствие области движения в (n+1)-м кадре, и, следовательно, ЦП 23 определяет, что разность больше порогового значения. ЦП 23 сохраняет информацию, указывающую, что процесса УЧК нет (шаг S111), производит приращение номера обрабатываемого кадра i (шаг S121) и повторяет шаги, начиная с шага S103 и далее.
[0033] ЦП 23 определяет, удовлетворяет ли номер кадра для обработки i условию i<4 (шаг S103). В данном случае i=1, и поэтому область движения обнаруживается в предыдущем кадре (шаг S105). В этом случае, как показано на Фиг. 4, n-й кадр и (n+1)-й кадр представляют собой одно и то же изображение, и поэтому разность между ними нулевая. Соответственно, область движения не обнаруживается.
[0034] Затем ЦП 23 обнаруживает область движения в последующем кадре (шаг S107 на Фиг. 3). В этом случае (n+1)-й кадр (n+2)-й кадр представляют собой одно и то же изображение, и поэтому разность между ними нулевая. Соответственно, область движения не обнаруживается.
[0035] ЦП 23 определяет, является ли разность между областью движения предыдущего кадра и областью движения последующего кадра равной пороговому значению или меньшей его (шаг S109). В данном случае область движения отсутствует, и поэтому разность нулевая.
[0036] Соответственно, ЦП 23 устанавливает флаг кандидата на процесс УЧК f таким образом, что для данного результата обнаружения f=1 (шаг S113). ЦП 23 определяет, был ли флаг f кандидата на процесс УЧК равным f=1 непрерывно на протяжении трех кадров (шаг S115). В данном случае флаг кандидата на процесс УЧК f не был f=1 непрерывно на протяжении трех кадров. Соответственно, ЦП 23 производит приращение номера кадра для обработки i (шаг S121) и повторяет шаги с шага S103 и далее.
[0037] ЦП 23 определяет, удовлетворяет ли номер кадра для обработки i условию i<4 (шаг S103). В данном случае i=2, и, следовательно, ЦП 23 обнаруживает область движения в предыдущем кадре (шаг S105). В данном случае, как показано на Фиг. 4, (n+1)-й кадр и (n+2)-й представляют собой одинаковое изображение, и поэтому разность между ними нулевая. Соответственно, область движения не обнаруживается.
[0038] Затем ЦП 23 производит обнаружение области движения в последующем кадре (шаг S107). В данном случае, как показано на Фиг. 4, область движения 207 получается из (n+2)-го кадра и (n+3)-го кадра. Это объясняется тем, что фоновая часть представляет собой одно и то же неподвижное изображение С, но прямоугольная область движущегося изображения 201 в изображениях В и D различается.
[0039] ЦП 23 определяет, является ли разность между областью движения предыдущего кадра и областью движения последующего кадра равной пороговому значению или меньшей его (шаг S109). В данном случае в предыдущем кадре области движения нет, и поэтому разность между областями движения превышает пороговое значение. Соответственно, ЦП 23 сохраняет в памяти, что процесс УЧК не выполняется (шаг S111), производит приращение номера кадра для обработки i (шаг S121) и повторяет шаги с шага S103 и далее.
[0040] ЦП 23 определяет, удовлетворяет ли номер кадра для обработки i условию i<4 (шаг S103). В данном случае i=3, и поэтому шаги S105 - S121 выполняются аналогичным образом.
[0041] ЦП 23 определяет, удовлетворяет ли номер кадра для обработки i условию i<4 (шаг S103). В данном случае i=4, и поэтому ЦП 23 выполняет обработку изображения с заданным параметром (шаг S131). ЦП 23 производит приращение номера обрабатываемого кадра i (шаг S132) и определяет, соответствует ли номер обрабатываемого кадра i условию i=16 (шаг S133). В данном случае i=5, и поэтому процесс возвращается к шагу S103, и процессы шагов с S131 по S133 повторяются.
[0042] Обработка повторяется тем же образом до i=15 включительно, и тогда, если номер обрабатываемого кадра i удовлетворяет условию i=16, процесс с шага S133 возвращается к шагу S101.
[0043] Таким образом определяется случай, когда процесс УЧК не выполняется.
[0044] (1.3.2 Случай, когда процесс УЧК выполняется)
Ниже описывается случай, когда процесс УЧК выполняется, со ссылками на Фиг. 3 и 5. В данном описании процесс УЧК изменяет значения необходимых пикселей в n-м кадре и (n+2)-м кадре.
[0045] ЦП 23 инициализирует номер обрабатываемого кадра i и флаг кандидата на процесс УЧК f (шаг S101). ЦП 23 определяет, удовлетворяет ли номер обрабатываемого кадра i условию i<4 (шаг S103). В данном случае i=0, и поэтому область движения определяется для предыдущего кадра (шаг S105). В случае, когда процесс УЧК выполняется, (n-1)-й кадр и n-й кадр отличны друг от друга, независимо от фоновой части 203, которая представляет собой неподвижное изображение, как показано на Фиг. 5. В результате процесса УЧК область движения 201 в (n-1)-м кадре отличается от области движения в n-м кадре. Соответственно, в результате обнаружения для n-го кадра, полученном из (n-1)-го кадра и n-го кадра, весь экран обнаруживается как область движения.
[0046] Затем ЦП 23 обнаруживает область движения в последующем кадре (шаг S107). В этом случае n-й кадр и (n+1)-й представляют собой одинаковое изображение, но они различаются вследствие выполняемого процесса УЧК. Соответственно, в результате обнаружения для (n+1)-го кадра, полученном из n-го кадра и (n+1)-го кадра, весь экран обнаруживается как область движения.
[0047] ЦП 23 определяет, является ли разность между областями движения меньшей порогового значения или равной ему (шаг S109). В данном случае в обоих кадрах весь экран является областью движения. Соответственно, разность между областями движения нулевая, и поэтому ЦП 23 определяет, что разность меньше порогового значения и устанавливает флаг кандидата на процесс УЧК f, равным f=1 (шаг S113). ЦП 23 определяет, был ли флаг кандидата на процесс УЧК f равным f=1 непрерывно на протяжении трех кадров (шаг S115). В данном случае флаг кандидата на процесс УЧК f не был f=1 непрерывно на протяжении трех кадров, и поэтому ЦП 23 выполняет приращение номера обрабатываемого кадра i (шаг S121) и повторяет шаги с шага S103 и далее.
[0048] ЦП 23 определяет, удовлетворяет ли номер обрабатываемого кадра i условию i<4 (шаг S103). В данном случае i=1, и поэтому область движения определяется для предыдущего кадра (шаг S105). В этом случае, как показано на Фиг. 5, n-й кадр и (n+1)-й кадр представляют собой одинаковое изображение, но они различаются вследствие выполняемого процесса УЧК. Соответственно, в результате обнаружения для (n+1)-го кадра, полученном из n-го кадра и (n+1)-го кадра, весь экран обнаруживается как область движения.
[0049] Затем ЦП 23 обнаруживает область движения в последующем кадре (шаг S107). В этом случае, как показано на Фиг. 5, (n+1)-й кадр и (n+2)-й кадр представляют собой одинаковое изображение, но они различаются вследствие выполняемого процесса УЧК. Соответственно, в результате обнаружения для (n+2)-го кадра, полученном из (n+1)-го кадра и (n+2)-го кадра, весь экран обнаруживается как область движения.
[0050] ЦП 23 определяет, является ли разность между областями движения меньшей порогового значения или равной ему (шаг S109). В данном случае в обоих кадрах весь экран является областью движения. Соответственно, разность между областями движения нулевая, и поэтому ЦП 23 определяет, что разность меньше порогового значения.
[0051] ЦП 23 устанавливает флаг кандидата на процесс УЧК f для данного результата обнаружения равным f=1 (шаг S113). ЦП 23 определяет, был ли флаг кандидата на процесс УЧК f равным f=1 непрерывно на протяжении трех кадров (шаг S115). В данном случае флаг кандидата на процесс УЧК f был f=1 непрерывно только для двух кадров, следовательно, он не был f=1 непрерывно на протяжении трех кадров. Соответственно, ЦП 23 выполняет приращение номера обрабатываемого кадра i (шаг S121) и повторяет шаги с шага S103 и далее.
[0052] ЦП 23 определяет, удовлетворяет ли номер обрабатываемого кадра i условию i<4 (шаг S103). В данном случае i=2, и поэтому область движения определяется для предыдущего кадра (шаг S105). В этом случае, как показано на Фиг. 5, (n+1)-й кадр и (n+2)-й кадр представляют собой одинаковое изображение, но они различаются вследствие выполняемого процесса УЧК. Соответственно, в результате обнаружения для (n+2)-го кадра, полученном из (n+1)-го кадра и (n+2)-го кадра, весь экран обнаруживается как область движения.
[0053] Затем ЦП 23 обнаруживает область движения в последующем кадре (шаг S107). В данном случае, как показано на Фиг. 5, в (n+2)-м кадре и (n+3)-м кадре процесс УЧК выполняется на фоновой части 203, и области движения 201 различны. Соответственно, в результате обнаружения для (n+3)-го кадра, полученном из (n+2)-го кадра и (n+3)-го кадра, весь экран обнаруживается как область движения.
[0054] ЦП 23 определяет, является ли разность между областями движения меньшей порогового значения или равной ему (шаг S109). В данном случае в обоих кадрах весь экран является областью движения. Соответственно, разность между областями движения нулевая, и поэтому ЦП 23 определяет, что разность меньше порогового значения.
[0055] ЦП 23 устанавливает флаг кандидата на процесс УЧК f для данного результата обнаружения равным f=1 (шаг S113). ЦП 23 определяет, был ли флаг кандидата на процесс УЧК f равным f=1 непрерывно на протяжении трех кадров (шаг S115). В данном случае флаг кандидата на процесс УЧК был f=1 непрерывно на протяжении трех кадров, и поэтому ЦП 23 определяет, что процесс УЧК выполняется (step S117). После этого процесса обнаружения ЦП 23 переключает параметр выполняемой обработки изображения, а именно, переключает пороговое значение обнаружения области движения на более высокое (шаг S119).
[0056] ЦП 23 выполняет приращение номера обрабатываемого кадра i (шаг S121) и повторяет шаги с шага S103 и далее. ЦП 23 определяет, удовлетворяет ли номер обрабатываемого кадра i условию i<4 (шаг S103). В данном случае i=3, и поэтому процессы шагов S105-S121 выполняются так же, как описано выше.
[0057] ЦП 23 определяет, удовлетворяет ли номер обрабатываемого кадра i условию i<4 (шаг S103). В данном случае i=4, и поэтому ЦП 23 выполняет процесс обнаружения движения с параметром, увеличенным в шаге S119 (шаг S131). После этого обработка производится так же, как и в случае, когда процесс УЧК не выполняется.
[0058] Таким образом, всего четыре кадра из 16, т.е. с 0-го по 3-й кадр, используются для определения, выполняется ли процесс УЧК, в зависимости от того, имеется ли разность между областями движения в предыдущем кадре и последующем кадре, и в случае если процесс УЧК выполняется, параметр для остальных 12 кадров изменяется с увеличением значения порога обнаружения при обнаружении области движения. В результате можно точно обнаруживать область движения, даже если процесс УЧК выполняется.
[0059] (1.3.3 Процесс определения прямоугольной области движения)
Ниже описывается метод определения прямоугольной области движения (шаги S105 и S107 на Фиг. 3) при определении процесса УЧК, принятом в настоящем изобретении.
[0060] Ниже описывается пример, в котором область отображения 100, представляющая собой один кадр на мониторе, включает три прямоугольных области движения изображения 110-112, как показано на Фиг. 7.
[0061] Область отображения 100 содержит пиксели, расположенные в виде матрицы, имеющей направление рядов α и направление столбцов β.
[0062] ЦП 23 выполняет разделение на блоки (шаг S1 на Фиг. 6). В данном варианте осуществления изобретения один блок включает 32×32 пикселя, и область отображения 100, показанная на Фиг. 7, разделена в виде матричного образования, включающего множество таких блоков. В приводимом ниже описании область отображения 100 разделена на n+1 блоков в направлении α и m+1 блоков в направлении β.
[0063] ЦП 23 определяет репрезентативные значения для всех блоков (шаг S3 на Фиг. 6). Эти репрезентативные значения могут быть средним значением из значений пикселей в каждом блоке, значением ведущего пикселя в каждом блоке или хеш-значением, например, значением циклического избыточного кода для каждого блока, где не используется непосредственно среднее значение или значение ведущего пикселя. В 32×32×8-битовом изображении среднее значение можно выразить длиной 18 бит, но можно удалить суммарно 10 бит сверху и снизу, так что используются только средние 8 бит. Полученные таким образом средние значения блоков (n+1)×(m+1) сохраняются в ОЗУ 25. Предпочтительно принимаются репрезентативные значения, которые достаточно точны для обнаружения в процессе УЧК.
[0064] ЦП 23 определяет блоки движения среди (n+1)×(m+1) блоков (шаг S5). Процесс определения блоков движения описывается на примере Фиг. 8.
[0065] ЦП 23 инициализирует номера обрабатываемых блоков i, j (шаги S11 и S13 на Фиг. 8). Для блока (0,0) производится сравнение с репрезентативным значением предыдущего кадра (шаг S15). В данном варианте осуществления изобретения сравниваются друг с другом репрезентативные значения во время t и время t-1. ЦП 23 определяет, превышает ли разность между репрезентативными значениями пороговое значение thb (шаг S17), и определяет блок как блок движения, если разность между репрезентативными значениями превышает пороговое значение thb (шаг S19). С другой стороны, ЦП 23 определяет блок как блок без движения, если разность между репрезентативными значениями не превышает порогового значения thb (шаг S21).
[0066] ЦП 23 определяет, является ли номер обрабатываемого блока j конечным номером (шаг S23). В данном случае j=0, что не является конечным номером, и поэтому ЦП 23 выполняет приращение номера блока j (шаг S25) и повторяет процесс с шага S15 и далее. На шаге S23, если номер блока j является конечным номером, процесс переходит на шаг S27, и ЦП 23 определяет, является ли номер обрабатываемого блока i конечным значением. В данном случае номер блока i не является конечным значением, и поэтому ЦП 23 выполняет приращение номера блока i (шаг S29) и повторяет шаги с шага S13 и далее. На шаге S27, если номер обрабатываемого блока i является конечным значением, процесс заканчивается.
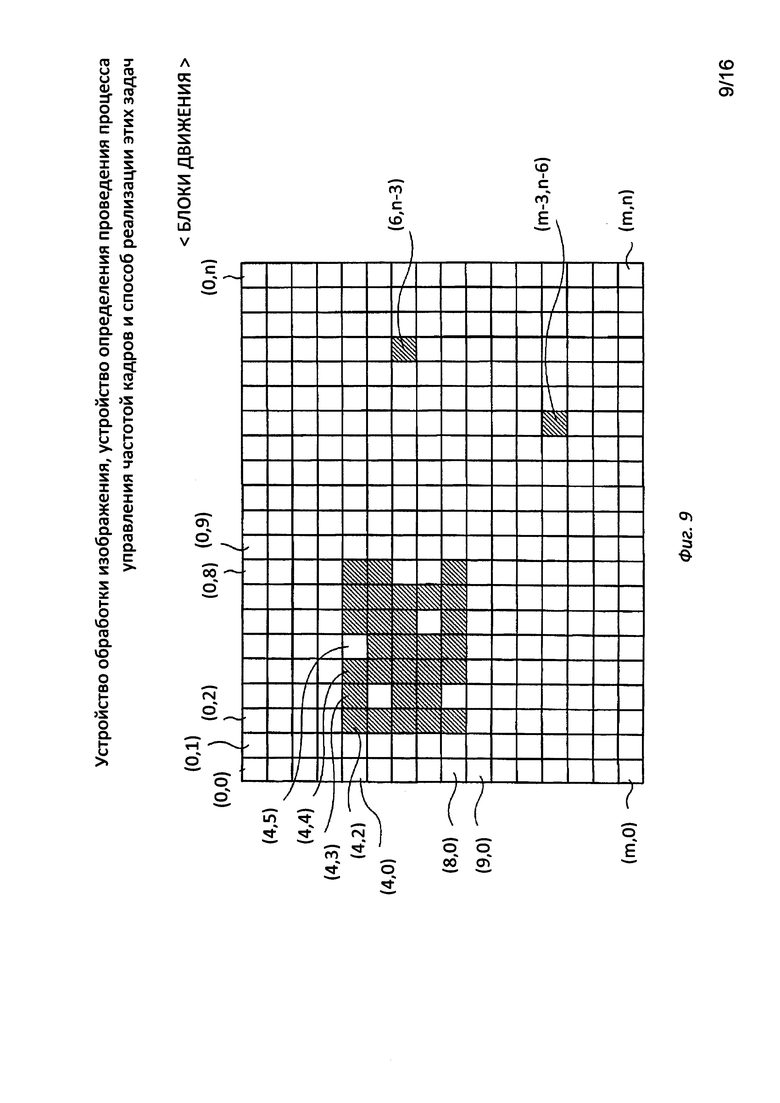
[0067] Таким образом, среди (n+1)×(m+1) блоков определяются блоки движения, как показано на Фиг. 9. В данном примере блоки (4, 2), (4, 3), (4,4) и т.д. определены как блоки движения.
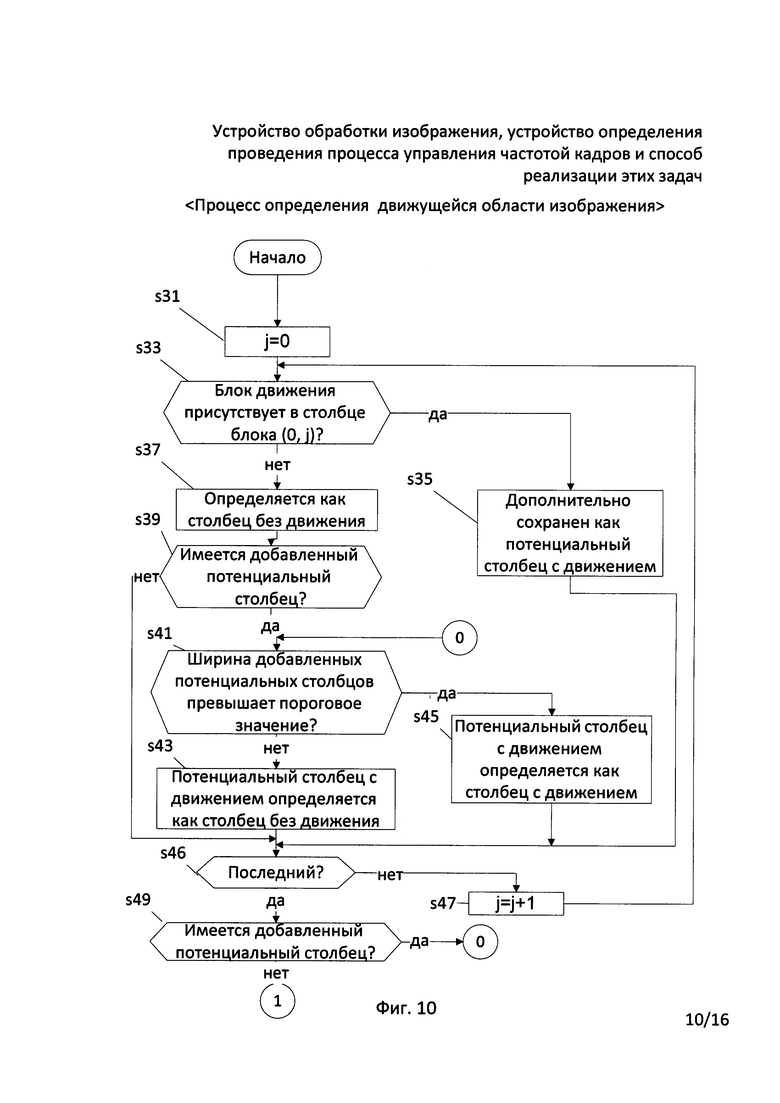
[0068] ЦП 23 выполняет процесс определения области движения изображения (шаг S7 на Фиг. 6). Ниже описываются подробности процесса определения области движения на примере Фиг. 10 и 12.
[0069] ЦП 23 инициализирует номер обрабатываемого блока j (шаг S31 на Фиг. 10). ЦП 23 определяет, имеется ли хотя бы один блок движения среди блоков в столбце, к которому относится блок (0,0) (шаг S33). В данном случае, как показано на Фиг. 9, среди блока (0, 0) и блоков (1, 0)-(m, 0) в вертикальном направлении от блока (0,0) нет блоков движения, и поэтому данный столбец определяется как столбец без движения (шаг S37 на Фиг. 10). ЦП 23 определяет, имеется ли потенциальный столбец с движением, который дополнительно сохранен в памяти (шаг S39). В данном случае такого потенциального столбца с движением нет, и поэтому процесс переходит к шагу S46, и ЦП 23 определяет, является ли номер обрабатываемого блока j конечным номером. В данном случае j=0, что не является конечным номером, и поэтому ЦП 23 производит приращение номера блока j (шаг S47) и повторяет шаги с шага S33 и далее.
[0070] Когда номер обрабатываемого блока j достигает j=2, то имеется блок с движением среди блоков в вертикальном направлении от блока (0, 2). Соответственно, ЦП 23 дополнительно сохраняет этот столбец как потенциальный столбец с движением (шаг S35).
[0071] ЦП 23 определяет, является ли номер обрабатываемого блока j конечным номером (шаг S46). В данном случае j=2, что не является конечным номером, и поэтому ЦП 23 производит приращение номера блока j (шаг S47) и повторяет шаги с шага 33 и далее.
[0072] Процесс шага 35 повторяется до номера обрабатываемого блока j=8 включительно. Для номера обрабатываемого блока j=9 блоки движения в столбце, содержащем блок (0,9), отсутствуют. Соответственно, ЦП 23 определяет, что этот столбец является столбцом без движения (шаг S37). ЦП 23 определяет, имеется ли потенциальный столбец с движением, который дополнительно сохранен в памяти (шаг S39), и если такой потенциальный столбец с движением имеется, то определяет, имеет ли общая группировка таких столбцов, примыкающих друг к другу, ширину, превышающую пороговое значение thw (шаг S41). В данном варианте изобретения пороговое значение thw установлено для двух блоков. В данном случае потенциальные столбцы с движением, которые были дополнительно сохранены, идут от блока (0, 2) до блока (0, 8), и их ширина превышает пороговое значение thw, поэтому эти потенциальные столбцы с движением определяются как столбцы с движением (шаг S45).
[0073] ЦП 23 определяет, является ли номер обрабатываемого блока j конечным номером (шаг S46).
[0074] Для номера обрабатываемого блока j=10 блоки движения в столбце, содержащем блок (0,10), отсутствуют. Соответственно, ЦП 23 определяет, что этот столбец является столбцом без движения (шаг S37). ЦП 23 определяет, обнаружен ли потенциальный столбец с движением (шаг S39), но такого столбца в данном случае нет, и поэтому ЦП 23 определяет, является ли номер обрабатываемого блока j конечным номером (шаг S46).
[0075] Следующие столбцы определяются как столбцы без движения до j=n-7 включительно. Для номера обрабатываемого блока j=n-6 блок движения имеется (m-3, n-6). Соответственно, ЦП 23 дополнительно сохраняет в памяти этот столбец как потенциальный столбец с движением (шаг S35).
[0076] Для номера обрабатываемого блока j=n-5 блоки движения в столбце, содержащем блок (0, n-5), отсутствуют. Соответственно, ЦП 23 определяет, что этот столбец является столбцом без движения (шаг S37). ЦП 23 определяет, обнаружен ли потенциальный столбец с движением (шаг S39,) и если такой потенциальный столбец с движением имеется, то определяет, имеет ли общая группировка таких столбцов, примыкающих друг к другу, ширину, превышающую пороговое значение thw (шаг S41). В данном варианте изобретения пороговое значение thw установлено для двух блоков, что означает, что ширина этого потенциального столбца с движением не превышает порогового значения thw, и поэтому этот потенциальный столбец с движением определяется как столбец без движения (шаг S43). Таким образом, можно предотвратить случай, когда такая область изображения, как значок мыши, будет ошибочно распознана как область изображения с движением.
[0077] Процесс продолжается аналогичным образом, при этом суждение о том, включает ли столбец блоки с движением, выносится последовательно, по одному столбцу за раз, в направлении рядов α.
[0078] Может встретиться случай, когда столбец последнего блока (0, n), который является последним столбцом, представляет собой столбец с потенциальным движением. В таком случае на шаге S49 ЦП 23 определяет, есть ли потенциальный столбец с движением, который был дополнительно сохранен в памяти, и если такой потенциальный столбец с движением имеется, выполняет процессы с шага S41 и далее.
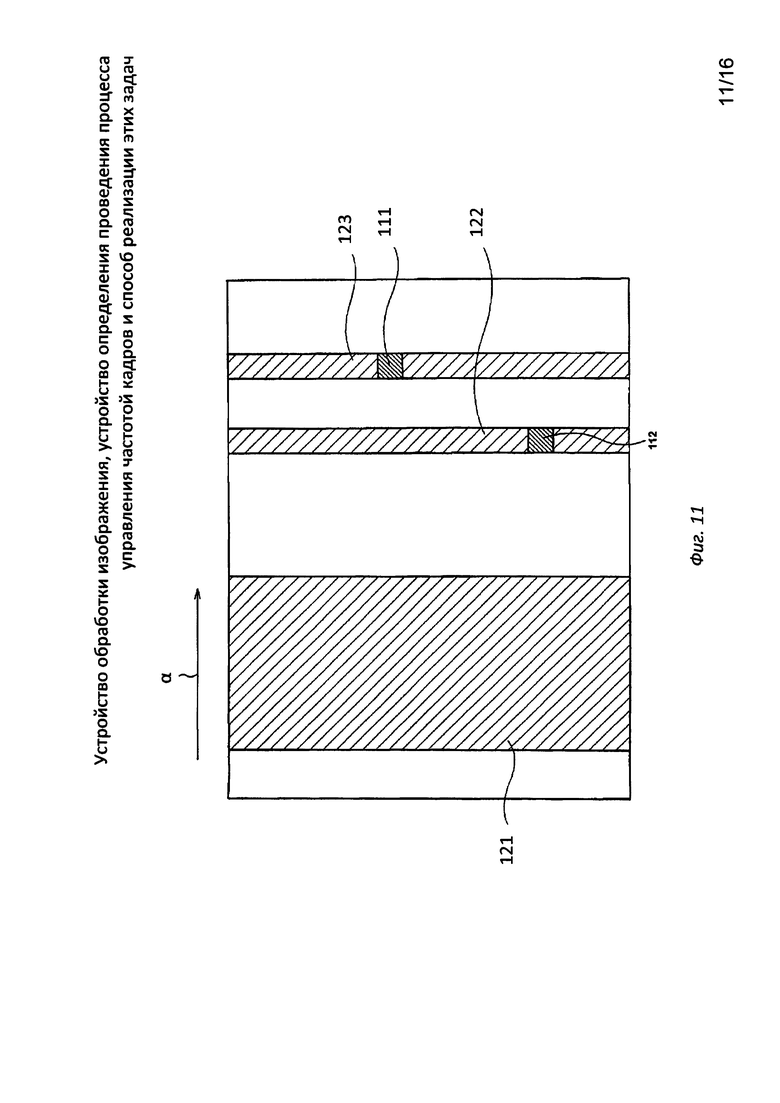
[0079] На Фиг. 11 показаны столбцы с движением после обнаружения. В данном случае область 121 определена как столбцы с движением. Напротив, области 122 и 123, где имеются блоки движения (6, n-3) и (m-3, n-6), не имеют такой ширины в направлении стрелки α, которая больше порогового значения thw или равна ему, и поэтому они не определяются как столбцы с движением.
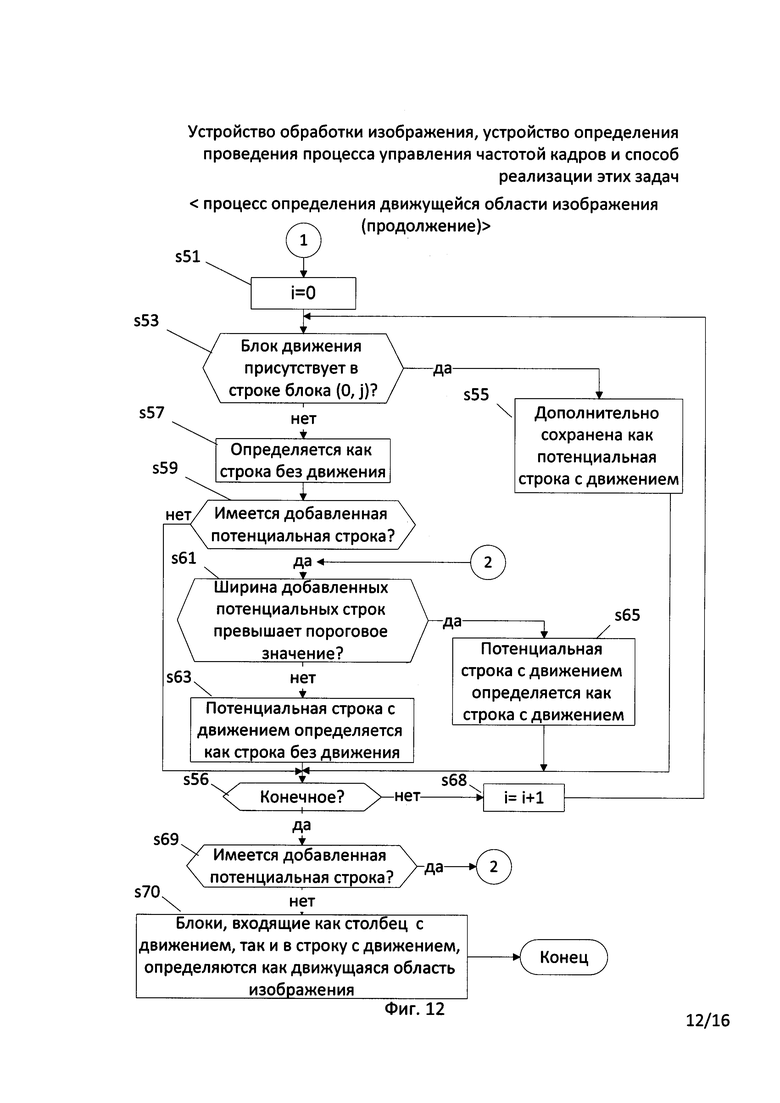
[0080] Затем ЦП 23 инициализирует номер обрабатываемого блока i (шаг S51 на Фиг. 12). ЦП 23 определяет, есть ли хотя бы один блок движения в строке блока (0,0) (шаг S53). В данном случае, как показано на Фиг. 9, блоки движения среди блока (0,0) и блоков (0,1)-(0, n) в горизонтальном направления от блока (0,0) отсутствуют, и поэтому эта строка определяется как строка без движения (шаг S57). ЦП 23 определяет, есть ли строка с движением, которая была дополнительно сохранена (шаг S59). В данном случае строк с движением обнаружено не было, и поэтому процесс переходит к шагу S66, и ЦП 23 определяет, является ли номер обрабатываемого блока i конечным значением. В данном случае i=0, что не является конечным номером, и поэтому ЦП 23 выполняет приращение номера обрабатываемого блока i (шаг S68) и повторяет шаги с шага S53 и далее.
[0081] Для номера обрабатываемого блока i=4 имеется блок движения в строке блока (4,0). Соответственно, ЦП 23 дополнительно запоминает эту строку как потенциальную строку с движением (шаг S55).
[0082] Суждение о строке с движением, в которой имеется блок движения в строке блока (i, 0) выносится таким же образом для следующих строк до i=8 включительно. Для i=9 в строке блока (i, 0) блоков движения нет, и поэтому эта строка определяется как строка без движения (шаг S57). ЦП 23 определяет, есть ли дополнительно сохраненная потенциальная строка с движением (шаг S59). В данном случае имеются дополнительно сохраненные потенциальные строки с движением, и поэтому ЦП 23 определяет, имеет ли группировка этих потенциальных строк с движением ширину, превышающую пороговое значение thw (шаг S61). В данном варианте осуществления изобретения пороговое значение thw установлено для двух блоков. В данном случае потенциальные строки с движением, которые были обнаружены, охватывают пространство от блока (4,0) до блока (8,0), а это ширина, превышающая пороговое значение thw, и поэтому эти потенциальные строки с движением распознаются как строки с движением (шаг S65).
[0083] Процесс продолжается тем же образом, так что суждение относительно того, включает ли строка блоки движения, выносится последовательно, по одной строке за один раз, в направлении столбцов β. Значение шага S69 такое же, как и шага S49, поэтому дальнейшее описание опускается.
[0084] На Фиг. 13 показаны строки с движением после обнаружения. В данном случае область 131 определена как строки с движением. Блок движения (6, n-3) относится к области 131. Напротив, область 132, где находится блок движения (m-3, n-6), не имеет ширины, превышающей пороговое значение thw или равной ему, в направлении стрелки β, и поэтому не определяется как строка с движением.
[0085] ЦП 23 определяет блоки, относящиеся как к столбцу с движением, так и к строке с движением, как области с движущимся изображением (шаг S70 на Фиг. 12). В данном случае блоки, относящиеся к области 140 (Фиг. 14), где накладываются друг на друга области 121 и 131, определяются как область с движущимся изображением. По сравнению с блоками движения на Фиг. 9, блоки движения (6, n-3) и (m-3, n-6) удалены, а блоки (4, 5) и подобные им определены как область с движущимся изображением. Таким образом, можно предотвратить исчезновение блоков вследствие связей с окружающими блоками.
[0086] ЦП 23 выполняет процесс определения границ (шаг S9 на Фиг. 6).
Для области 140, показанной на Фиг. 14, граница 150 получена для области с движущимся изображением из блоков, каждый из которых образован системой из 32×32 пикселей. В соответствии с процессом шага S9, можно получать область движущегося изображения в единицах в 1 пиксель, как показано на Фиг. 16. Подробнее шаг S9 описывается на примере Фиг. 15.
[0087] ЦП 23 выделяет верхние блоки (шаг S80 на Фиг. 15). В данном случае выделяется всего семь блоков, это блоки с (4, 2) по (4, 8), показанные на Фиг. 16. ЦП 23 инициализирует номер обрабатываемой строки Р (шаг S81), выделяет все пиксели в Р-том ряду выделенных блоков и вычисляет репрезентативные значения этих блоков (шаг S83). В данном случае выделяется всего of 7×32 пикселей, в том числе 32 пикселя в 0-й строке блока (4, 2), 32 пикселя в 0-й строке блока (4, 3) и т.д., и для этих блоков вычисляются репрезентативные значения. В данном варианте осуществления изобретения каждое репрезентативное значение вычисляется как среднее выделенных пикселей.
[0088] Затем ЦП 23 выделяет все пиксели (Р+1)-й строки из выделенных блоков и вычисляет репрезентативные значения этих блоков (шаг S85). В данном случае выделяется всего 7×32 пикселей, в том числе 32 пикселя в 1-й строке блока (4, 2), 32 пикселя в 1-й строке блока (4, 3) и т.д., и для этих блоков вычисляются репрезентативные значения.
[0089] ЦП 23 определяет, отличаются ли репрезентативные значения, вычисленные в шаге S83, от репрезентативных значений, вычисленных в шаге S85 (шаг S87). Если эти вычисленные значения на шаге S87 различаются, ЦП 23 определяет, что строка пикселей (Р, 0) является границей (шаг S93). Если репрезентативные значения на шаге S87 не различаются, ЦП 23 производит приращение номера обрабатываемой строки Р (шаг S89) и повторяет шаги с шага 83 и далее, пока не достигнет последнего пикселя выделенных блоков, который в данном случае является 32-м пикселем (шаг S91). Если репрезентативные значения на шаге S87 не различаются даже для последнего пикселя, ЦП 23 определяет, что границей является конец выделенного блока (шаг S95).
[0090] На Фиг. 15 показан пример, в котором граница в верхних блоках выделяется в единицах в 1 пиксель, но выделение производится таким же образом, как и в нижних блоках.
[0091] Таким образом, для периферийных блоков, путем выделения одной строки пикселей в горизонтальном направлении из верхних или нижних блоков можно получить границу в пределах блоков в единицах в 1 пиксель.
[0092] Что касается левой и правой границ, выделяется один столбец пикселей в вертикальном направлении, и репрезентативные значения этих блоков можно сравнить с репрезентативными значениями блоков соседнего столбца.
[0093] В данном устройстве область с движущимся изображением может обнаруживаться автоматически. Кроме того, можно производить определение на основе нескольких кадров. Соответственно, даже когда сама область движущегося изображения динамически изменяется на мониторе, эту область можно обнаруживать практически в реальном времени.
[0094] (1.4 Второй вариант осуществления изобретения)
В данном варианте осуществления изобретения обнаруживается сдвиг между областью движения предыдущего кадра и областью движения последующего кадра, чтобы определить, выполняется ли процесс УЧК. Однако данный вариант этим не ограничивается, и для любого из кадров можно вычислить целевой кадр, который описан ниже, и сравнить область движения этого целевого кадра с областью движения другого кадра. Вычисление целевого кадра производится, например, следующим образом. Вычисляется разность между пикселем на левом краю и соседним пикселем в горизонтальном направлении. В случае области отображения, имеющей черную полосу, после того как разность продолжает быть нулевой в течение некоторого периода времени, разность внезапно становится большой. Такое же явление происходит на правой стороне экрана. Можно определить целевую область путем вычисления разности на правой и левой сторонах в горизонтальном направлении экрана, и на верхней и нижней сторонах в вертикальном направлении экрана. Например, в горизонтальном направлении имеется нулевая разность, продолжающаяся в нескольких строках сверху, и когда обнаруживается нулевая разность, последующие разности также обнаруживаются как нулевые. Этот тип обнаружения может производиться для всех строк, или же может выделяться часть строк, на которой производится определение таким образом. Определяя целевую область выявления УЧК этим способом, при низком разрешении экрана можно удалять периферийные области, где процесс УЧК не выполняется.
[0095] (2. Другие варианты)
В вариантах осуществления изобретения, описанных выше, определение производится исходя из того, является ли сдвиг между областью движения предыдущего кадра и областью движения последующего кадра непрерывным для некоторого количества кадров и меньшим или равным пороговому значению. Таким способом можно удалять шум. Кроме того, можно обнаруживать стандартные движущиеся изображения. Это возможно потому, что в стандартном движущемся изображении, даже если область движущегося изображения обнаруживается один раз среди нескольких кадров, области движущегося изображения почти никогда не обнаруживаются много раз подряд.
[0096] Это не ограничивается случаем непрерывных обнаружений, и может быть определено, что процесс УЧК выполняется, если сдвиг меньше или равен пороговому значению даже один раз.
[0097] В данном изобретении определяется, что процесс УЧК выполняется, если сдвиг между областью движения предыдущего кадра и областью движения последующего кадра меньше порогового значения или равен ему, но данное изобретение этим не ограничивается, и может быть определено, что процесс УЧК выполняется, если обнаружение области движения и необнаружение области движения не повторяются.
[0098] В описанных выше вариантах изобретения обнаружение движения описывается как пример обработки изображения, выполняемой после процесса УЧК. Обнаружение устройством обнаружения УЧК можно настроить так, что оно будет иметь более высокую точность, чем нормальное обнаружение движения, поскольку оба они представляют собой обнаружение движения. Чтобы получить более высокую точность, можно принять значение, которое позволит выделять количества блоков, содержащие признаки, более точно. Например, обнаружение при обработке последующего изображения может включать выявление количества блоков с признаками, используя средние значения пикселей и, при вычислении обнаружения УЧК, используя циклический избыточный код или подобное, что позволяет более точно определять количество блоков с признаками для обнаружения движения.
[0099] Кроме того, вместо изменения характера количества признаков, можно использовать те же самые количества признаков и достигать точного определения, увеличив минимальное пороговое значение для количества признаков каждого блока.
[0100] В приведенном выше описании область отображения делится на блоки, но вместо этого можно создать память кадров и производить определение областей движения путем сравнения в единицах пикселей.
[0101] В описанном варианте осуществления изобретения обнаружение УЧК производится на первых 4 кадрах из 16, и пороговое значение для обработки изображения изменяется для последних 12 кадров на основе определения УЧК, но вместо этого процесс можно отложить на один период и изменять пороговое значение для следующего набора из 12 кадров. Кроме того, скорость кадров входного изображения и скорость отображения монитора произвольные.
[0102] В описанных выше вариантах изобретения весь экран воспринимается как область движения в случае, когда весь экран воспринимается как область движущегося изображения на основе предыдущего кадра и последующего кадра, но в этом случае может произойти определение, которое не обнаружит области движения.
[0103] В варианте изобретения, показанном на Фиг. 6-16, при выделении области движения определяются блоки, расположенные на периферии области движения, и блоки, содержащиеся внутри них, определяются как область движения, но способ не ограничивается определением прямоугольной области движения.
[0104] В описанных вариантах изобретения в качестве значений пикселей приняты значения яркости, но вместо них могут быть приняты значения «красный-зеленый-синий» или подобные.
[0105] В описанных выше вариантах изобретения устройство для определения области движения описано как пример устройства обработки изображения, но в других типах устройств обработки изображения, таких как устройство обнаружения текста или устройство устранения шума, можно производить аналогичную обработку изображения даже для изображений, которые были подвергнуты процессу УЧК, изменив пороговое значение конечной обработки изображения таким же образом, на основе результатов обнаружения процесса УЧК.
[0106] Данное устройство может быть настроено как монитор, который дополнительно включает секцию УЧК-обработки, или оно может быть настроено как видеоплата, которая дополнительно включает секцию УЧК-обработки. Кроме того, секция УЧК-обработки может быть установлена на видеоплате и настроена как монитор, включающий настоящее устройство.
[0107] Даже если частота кадров входного изображения составляет 60 к/с, если часть входного изображения представляет собой область неподвижного изображения, можно определить, выполняется ли процесс УЧК. Кроме того, при этой частоте кадров, когда весь экран представляет собой область движения, существует опасность, что будет невозможно определить, подверглось ли изображение процессу УЧК, но в таком случае периодический процесс УЧК не выполняется, и, следовательно, это не является большой проблемой.
[0108] В описанных выше вариантах изобретения для реализации функций, показанных на Фиг. 1, используется ЦП 23 и соответствующее программное обеспечение. Однако некоторые или все эти функции могут быть реализованы с помощью аппаратных устройств, таких как логические схемы. Некоторые из процессов программы может выполнять операционная система (ОС).
Список позиционных обозначений
[0109] 23: ЦП
25: ОЗУ
26: флеш-память.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЛАСТИ ДВИЖУЩЕГОСЯ ИЗОБРАЖЕНИЯ И СПОСОБ | 2012 |
|
RU2623890C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ТРУДНО РАЗЛИЧИМЫХ ПРЕПЯТСТВИЙ, СПОСОБНЫХ СОЗДАВАТЬ ПОМЕХИ НИЗКОЛЕТЯЩИМ ВЕРТОЛЕТАМ И САМОЛЕТАМ | 2009 |
|
RU2437158C2 |
| Способ формирования панорамных изображений из видеопотока кадров в режиме реального времени | 2016 |
|
RU2626551C1 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ КАДРОВ ПОТОКА МУЛЬТИМЕДИЙНЫХ ДАННЫХ НА ОСНОВЕ КОРРЕЛЯЦИОННОГО АНАЛИЗА ГИСТОГРАММ ИЗОБРАЖЕНИЙ КАДРОВ | 2015 |
|
RU2607415C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ОБЛАСТИ ИЗОБРАЖЕНИЯ | 2015 |
|
RU2642404C2 |
| Способ устранения швов при создании панорамных изображений из видеопотока кадров в режиме реального времени | 2016 |
|
RU2647645C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АНАЛИТА В ФИЗИОЛОГИЧЕСКОЙ ЖИДКОСТИ | 2013 |
|
RU2604166C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2702219C2 |
| УСТРОЙСТВО СЪЕМКИ ДВИЖУЩИХСЯ ИЗОБРАЖЕНИЙ, СИСТЕМА И УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2570195C2 |
Изобретение относится к области обработки изображений. Технический результат - обеспечение обработки изображений посредством использования результатов определения выполнения процесса управления частотой кадров. Устройство обработки изображения включает: средство обнаружения области движения в предыдущем кадре, которое обнаруживает область движения в предыдущем кадре среди множества кадров, относительно которых неизвестно, был ли выполнен для них процесс управления частотой кадров; средство обнаружения области движения в последующем кадре, которое обнаруживает область движения в последующем кадре, расположенном после предыдущего кадра; средство определения, которое определяет, был ли выполнен процесс управления частотой кадров, когда сдвиг между областью движения предыдущего кадра и областью движения последующего кадра меньше порогового значения сдвига областей или равен ему, и на основе определения того, что процесс управления частотой кадров был выполнен, выдает команду изменения параметра для изменения порогового значения параметра обработки изображения; и средство обработки изображения, которое изменяет пороговое значение параметра обработки изображения. 5 н. и 5 з.п. ф-лы, 16 ил.
1. Устройство обработки изображения, включающее:
средство обнаружения области движения в предыдущем кадре, которое обнаруживает область движения в предыдущем кадре среди множества кадров, относительно которых неизвестно, был ли выполнен для них процесс управления частотой кадров;
средство обнаружения области движения в последующем кадре, которое обнаруживает область движения в последующем кадре, расположенном после предыдущего кадра;
средство определения, которое на основе области движения предыдущего кадра и последующего кадра определяет, был ли выполнен процесс управления частотой кадров, причем средство определения определяет, что процесс управления частотой кадров был выполнен, когда сдвиг между областью движения предыдущего кадра и областью движения последующего кадра меньше порогового значения сдвига областей или равен ему, и на основе определения того, что процесс управления частотой кадров был выполнен, выдает команду изменения параметра для изменения порогового значения параметра обработки изображения; и
средство обработки изображения, которое, по получении команды изменения параметра, изменяет пороговое значение параметра обработки изображения.
2. Устройство обработки изображения по п. 1, в котором
средство определения определяет, что процесс управления частотой кадров выполнен, когда определение сдвига произведено повторно множество раз для непрерывно следующих кадров.
3. Устройство обработки изображения по п. 1 или 2, в котором
область движения в каждом кадре образована блоками, каждый из которых образован множеством пикселей.
4. Устройство обработки изображения по п. 1 или 2, в котором
средство обработки изображения представляет собой средство определения прямоугольной области движения, которое, по получении команды изменения параметра, производит изменение, увеличивая пороговое значение параметра обработки изображения для определения области движения.
5. Устройство обработки изображения по п. 1 или 2, в котором
средство обработки изображения представляет собой средство определения текстовой области, по получении команды изменения параметра, производит изменение, уменьшая пороговое значение параметра обработки изображения для определения текстовой области.
6. Устройство обработки изображения по п. 1 или 2, в котором
средство обработки изображения представляет собой средство устранения шума, которое, по получении команды изменения параметра, производит изменение, увеличивая пороговое значение параметра обработки изображения для определения шума.
7. Устройство для обнаружения прямоугольной области движения, включающее средство обнаружения прямоугольной области движения, которое обнаруживает прямоугольную область движения по получении данных об изображении для каждого из множества кадров, причем устройство для обнаружения прямоугольной области движения включает:
средство определения, которое обнаруживает предыдущую прямоугольную область движения в предыдущем кадре и последующую прямоугольную область движения в последующем кадре, который расположен после предыдущего кадра, и, когда сдвиг между прямоугольной областью движения предыдущего кадра и прямоугольной областью движения последующего кадра меньше порогового значения сдвига областей или равен ему, определяет, что выполняется процесс управления частотой кадров и выдает команду изменения параметра для изменения порогового значения параметра обработки изображения; и
средство предоставления данных, которое снабжает средство определения данными об изображении для части кадров из множества кадров, где
обнаружение областей движения в кадре средством определения выполняется с большей точностью, чем определение прямоугольной области движения средством обнаружения прямоугольной области движения.
8. Устройство обнаружения процесса управления частотой кадров, включающее:
средство обнаружения прямоугольной области движения в кадре, которое обнаруживает прямоугольную область движения в каждом из множества кадров, относительно которых неизвестно, выполнялся ли для них процесс управления частотой кадров, по получении данных об изображении для множества кадров; и
средство определения, которое на основе прямоугольных областей движения определяет, выполнен ли процесс управления частотой кадров, причем средство определения определяет, что процесс управления частотой кадров выполнен, когда сдвиг между прямоугольной областью движения предыдущего кадра, обнаруженной средством обнаружения прямоугольной области движения кадра, и прямоугольной областью движения последующего кадра, который расположен после предыдущего кадра, меньше порогового значения сдвига областей или равен ему, и на основе определения того, что процесс управления частотой кадров был выполнен, выдает команду изменения параметра для изменения порогового значения параметра обработки изображения.
9. Способ обработки изображения, включающий:
обнаружение области движения в предыдущем кадре среди множества кадров, относительно которых неизвестно, был ли выполнен для них процесс управления частотой кадров;
обнаружение области движения в последующем кадре, который расположен после предыдущего;
определение того, выполнялся ли процесс управления частотой кадров на основе области движения предыдущего кадра и области движения последующего кадра, причем указанное определение включает определение того, что процесс управления частотой кадров был выполнен, когда сдвиг между областью движения предыдущего кадра и областью движения последующего кадра меньше порогового значения сдвига областей или равен ему, и на основе определения того, что процесс управления частотой кадров был выполнен, выдачу команды изменения параметра для изменения порогового значения параметра обработки изображения; и
по получении команды изменения параметра, изменение порогового значения параметра обработки изображения.
10. Способ обнаружения процесса управления частотой кадров, включающий:
обнаружение прямоугольной области движения в предыдущем кадре по получении данных об изображении для множества кадров, относительно которых неизвестно, был ли выполнен для них процесс управления частотой кадров, связанных с предыдущим кадром;
обнаружение прямоугольной области движения в последующем кадре по получении данных об изображении для множества кадров, относительно которых неизвестно, был ли выполнен для них процесс управления частотой кадров, связанных с последующим кадром, который расположен после предыдущего кадра; и
определение того, выполнялся ли процесс управления частотой кадров на основе прямоугольных областей движения, причем такое определение определяет, что процесс управления частотой кадров выполнен, когда сдвиг между прямоугольной областью движения предыдущего кадра и прямоугольной областью движения последующего кадра меньше порогового значения сдвига областей или равен ему, и на основе определения того, что процесс управления частотой кадров был выполнен, выдачу команды изменения параметра для изменения порогового значения параметра обработки изображения.
| US 5903673 A, 11.05.1999 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ ВИДЕОИЗОБРАЖЕНИЯ | 2009 |
|
RU2452039C2 |

