ССЫЛКИ НА СВЯЗАННЫЕ ЗАЯВКИ
Для целей патентной защиты в Соединенных Штатах Америки настоящая заявка представляет собой заявку на патент на изобретение и на основании 35 U.S.C. § 119(e) является заявлением о притязаниях на приоритет в отношении предварительной патентной заявки номер 61/801,965, поданной 15 марта 2013 г., и настоящая заявка представляет собой продолжающуюся патентную заявку и на основании 35 U.S.C. §120 является заявлением о притязаниях на приоритет в отношении патентной заявки в США номер 13/894,395, поданной 14 марта 2013 г., каковая заявка ('395) является заявкой на постоянный патент за изобретение и на основании 35 U.S.C. § 119(e) является заявлением о притязаниях на приоритет в отношении предварительной патентной заявки в США номер 61/801,965, поданной 15 марта 2013 г. Каждая из указанных патентных заявок в США, а также любые их публикации, прямо и в полном объеме включены по ссылке в настоящий документ.
Кроме того, весь патент США №7,239,731, выданный г-ну Семенову и иным лицам 3 июля 2007 г. и озаглавленный "СИСТЕМА И СПОСОБСПОСОБ НЕРАЗРУШАЮЩЕГО ФУНКЦИОНАЛЬНОГО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ И ОТОБРАЖЕНИЯ ЭЛЕКТРИЧЕСКИХ ВОЗМУЩЕНИЙ В БИОЛОГИЧЕСКИХ ТКАНЯХ С ПОМОЩЬЮ ТОМОГРАФИИ И СПЕКТРОСКОПИИ НА ОСНОВЕ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ", включается в настоящий документ по ссылке. Содержание указанного выше патента может быть использовано в качестве исторической и технической информации в отношении систем и вариантов использования изобретений, описанных в настоящем документе.
Кроме того, вся Публикация Патентной заявки в США №2012/0010493 A1, которая была опубликована 12 января 2012 г. на основании Патентной заявки в США №13/173,078 от имени г-на Семенова, поданной 30 июня 2011 г. и озаглавленной "СИСТЕМЫ И СПОСОБЫ ЧЕТЫРЕХМЕРНОГО ЭЛЕКТРОМАГНИТНОГО ТОМОГРАФИЧЕСКОГО (ЭМТ) ДИФФЕРЕНЦИАЛЬНОГО (ДИНАМИЧЕСКОГО) СМЕШАННОГО ПОСТРОЕНИЯ ИЗОБРАЖЕНИЙ", включается в настоящий документ по ссылке. Содержание указанной выше публикации может быть использовано в качестве разъяснений относительно использования четырехмерной технологии в системах ЭМТ, в том числе в части изобретений, описанных в настоящем документе.
ЗАЯВЛЕНИЕ ОБ АВТОРСКИХ ПРАВАХ
Все материалы в настоящей патентной заявке охраняются законодательством об авторских и смежных правах Соединенных Штатов Америки и других стран. Владелец авторских прав не возражает против факсимильного воспроизведения патентной заявки любым лицом или раскрытия патентной информации для отражения в государственных регистрационных документах, но в противном случае все прочие авторские и смежные права сохраняются за владельцем.
ИСТОРИЯ ИЗОБРЕТЕНИЯ
Область, к которой относится изобретение
Настоящее изобретение в целом имеет отношение к электромагнитной томографии и, в частности, но не исключительно, к получению электромагнитных томографических изображений с использованием переносных устройств, включая способы, устройства и системы.
Предшествующий уровень техники
Электромагнитная томография (ЭМТ) является относительно новым средством получения изображений и обладает большим потенциалом использования для биолого-медицинских целей, в том числе для неинвазивной оценки функционального и патологического состояния биологических тканей. Способ ЭМТ позволяет дифференцировать биологические ткани и, соответственно, создавать их изображения на основании различий в диэлектрических свойствах тканей. Известно, что диэлектрические свойства тканей зависят от их различных функциональных и патологических состояний, таких как наполненность кровью и кислородом, наличие ишемических и инфарктных повреждений.
Системы двухмерной (2D), трехмерной (3D) и даже «четырехмерной» (4D) ЭМТ и способы способ создания изображений разрабатывались в течение последних десяти или более лет. Возможность применения этой технологии для различных биолого-медицинских целей уже доказана, например, в виде построения изображений сердца и конечностей.
Как и в случае любого иного создания биомедицинских изображений классический алгоритм ЭМТ состоит из циклов измерений комбинированных сигналов, которые были рассеяны или «изменились в результате интерференции» со стороны исследуемого биологического объекта; такие сигналы поступают от множества передатчиков, расположенных в различных точках вокруг объекта, и измеряются множеством приемных устройств, расположенных в различных точках вокруг объекта. Это показано на ФИГ. 1. В иных разделах настоящего документа приводится информация о том, что замеренные типологические свойства рассеянных электромагнитных сигналов могут быть использованы для различных способов создания изображений посредством реконструкции двухмерного или трехмерного распределения диэлектрических свойств объекта, т.е. для создания двухмерного или трехмерного изображения объекта. Далее, при реконструкции трехмерных изображений в различные моменты времени могут создаваться четырехмерные изображения.
В целом, для создания изображений очень важно предельно точно описать распределение электромагнитного поля в области сканирования 21. Распределение электромагнитного поля в камере для сканирования представляет собой очень сложное явление, даже если внутри нет исследуемого объекта.
ФИГ. 2 представляет собой схематическое изображение одного возможного варианта реализации разработанной ранее электромагнитной полевой томографической спектроскопической системы 10. Такая система 10 также может создавать функциональные изображения биологических тканей, а также использоваться для неразрушающего картографирования электрического возбуждения биологических тканей 19 с использованием чувствительного (контрастного) материала (раствора или наночастиц), введенного в биологическую ткань 19 или в систему циркуляции; такие ткани характеризуются наличием диэлектрических свойств, проявляющихся в зависимости от электрического поля, порождаемого биологической тканью 19 в возбужденном состоянии. Как показано на ФИГ. 2, система 10 включает рабочую камеру или камеру для сканирования 12, ряд кластеров "источников - детекторов электромагнитного поля" 26, равное количество кластеров детекторов промежуточной частоты (“IF”) 28 и систему контроля (не показана на ФИГ. 2). Кроме того, хотя показано только два кластера источников-детекторов электромагнитного поля 26 и два кластера детекторов IF 28, фактически используется значительно большее количество кластеров каждого вида.
Камера для сканирования 12 представляла собой закрытую емкость, такую как водонепроницаемую емкость, достаточного размера для того, чтобы внутрь можно было поместить человеческое тело или одну или несколько частей человеческого тела. Например, камера для сканирования 12 может иметь (i) форму шлема для сканирования мозговых нарушений (например, острых или хронических инсультов), (ii) цилиндрическую или иную форму для сканирования конечностей, или (iii) особую форму для диагностики рака груди. Соответственно, камера для сканирования может быть различной формы и размера.
Камера для сканирования 12 и ее кластеры электромагнитного поля 26, а также кластеры детекторов IF 28, могут быть установлены на тележки, чтобы соответствующие компоненты можно было перемещать по мере необходимости, а тележки могут фиксироваться на месте для обеспечения стабильности.
В предельно упрощенном виде система 10 функционирует следующим образом. Исследуемый объект (например, биологическая ткань), помещается в область сканирования 21. Передающее оборудование генерирует электромагнитное (ЭМ) излучение и направляет его на одну из антенн. Указанная антенна передает электромагнитные волны в область сканирования 21, а все остальные антенны принимают электромагнитные волны, прошедшие через какую-то часть области сканирования 21. Приемное оборудование улавливает результирующий сигнал (или сигналы), и затем тот же самый цикл повторяется в отношении следующей антенны, затем - еще одной антенны, и так до тех пор, пока все антенны не «поработают» в качестве передатчиков. Как описывается, например, в указанном выше Патенте США №7,239,731, технология кодового разделения может быть использована таким образом, что передающее оборудование будет генерировать ЭМ излучение и направлять его на ряд одновременно ведущих передачу антенн, которым были присвоены уникальные «коды антенн», при котором результирующее ЭМ излучение, принятое на конкретной антенне, может быть «опознано» на основании присвоенного кода. Итоговым результатом являются блок общих данных, который передается на один или несколько компьютеров, задействованных в системе контроля, которые обрабатывают данные, необходимые для создания изображения объекта 19 в области сканирования 21. В рамках данного процесса используется так называемый «обратный» алгоритм.
ФИГ. 4 является схематичной иллюстраций настройки системы из ФИГ. 2 для работы в режиме создания трехмерных изображений.
К сожалению, традиционные технологии ЭТМ, хотя и дают очень полезные результаты, предусматривают использование не только громоздкого, но и сложного в управлении оборудования. Это касается усилий как технических специалистов, так и врачей-диагностов и любых иных лиц, равно как и проходящих исследования людей и животных. По последнему пункту следует отметить, что дискомфорт от помещения в камеру для сканирования может быть значительным. Размеры и вес оборудования также предполагают его использование по месту установки, разборка и перевозка на новое место проблематичны. И наконец, использование антенных решеток и иного оборудования повышает сложность и издержки. Таким образом, существует потребность в технологии, позволяющей получить сходные результаты, но являющейся более дешевой, более удобной и более комфортной с точки зрения эргономики использования.
Кроме того, существует спрос на решения по созданию изображений и диагностированию в рамках технологий ЭМТ, но не в условиях стационарного медицинского учреждения. В частности, существует необходимость в обеспечении доступности технологий ЭМТ в обычной жизни, которые бы обеспечивали надежное, предоставляемое по первому требованию, осуществляемое в режиме «онлайн» (в реальном времени) сканирование и диагностику.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
В целом, настоящее изобретение по одному из аспектов представляет собой носимую/переносную систему для проведения электромагнитной томографии, включающую: носимый/переносной корпус сканера, рассчитанный на помещение в него биологического объекта; систему определения положения; оборудование для передачи и приема электромагнитного излучения, которое все вместе создает электромагнитное поле, проходящее через корпус сканера, и измеряет электромагнитное поле после того, как оно было рассеяно/изменено в результате интерференции со стороны биологического объекта внутри корпуса сканера; и центральный процессор, осуществляющий построение электромагнитных томографических изображений на основании созданного и измеренного электромагнитного поля и с использованием данных от системы определения положения.
Характеристикой данного аспекта является то, что носимый/переносной корпус сканера представляет собой полую конструкцию, в стенках которой встроено определенное количество «окошек» для электромагнитного излучения, через которые будет входить и выходить электромагнитное поле.
Дополнительной характеристикой данного аспекта является то, что стенки полой конструкции формируют границу области сканирования и по меньшей мере частично выполнены из материала, непроницаемого для электромагнитного поля, создаваемого оборудованием, передающим и принимающим электромагнитное излучение, и при этом «окошки» для электромагнитного излучения распределены по стенкам таким образом, чтобы полностью окружить область сканирования.
Еще одной дополнительной характеристикой данного аспекта является то, что пространственное местоположение всех «окошек» для электромагнитного излучения является известным. Дополнительные характеристики также включают в себя следующее: каждое «окошко» для электромагнитного излучения может открываться и закрываться независимо от других, что позволяет контролировать вход и/или выход электромагнитного поля из «окошка»; каждое «окошко» для электромагнитного излучения может быть открыто и закрыто независимо от других с помощью соответствующего микрошлюза; управление микрошлюзами осуществляется таким образом, что электромагнитное поле в каждый отдельно взятый момент времени попадает внутрь корпуса сканера только через одно «окошко»; управление микрошлюзами осуществляется таким образом, что электромагнитное поле попадает внутрь корпуса сканера через несколько «окошек" одновременно; управление микрошлюзами осуществляется таким образом, что электромагнитное поле покидает корпус сканера только через одно «окошко» в каждый отдельно взятый момент времени; управление микрошлюзами осуществляется таким образом, что электромагнитное поле покидает корпус сканера через несколько «окошек» одновременно; у каждого микрошлюза есть свой индивидуальный код; и/или в момент входа электромагнитного поля внутрь корпуса сканера через открытое «окошко» код микрошлюза открытого «окошка» присваивается электромагнитному полю. Информация о пространственном расположении «окошек» для электромагнитного излучения может быть получена с помощью системы определения положения; и/или информация о пространственном расположении «окошек» для электромагнитного излучения может быть установлена без использования системы определения положения.
Еще одной дополнительной характеристикой данного аспекта является то, что система определения положения получает информацию о положении корпуса сканера, а центральный процессор создает магнитно-томографическое изображение на основании измеренного электромагнитного поля и с учетом информации о положении корпуса сканера, полученной от системы определения положения.
Еще одной дополнительной характеристикой данного аспекта является то, что система определения положения получает информацию о положении «окошек» для электромагнитного излучения, а центральный процессор создает магнитно-томографическое изображение на основании измеренного электромагнитного поля и с учетом информации о положении «окошек», полученной от системы определения положения.
Еще одной дополнительной характеристикой данного аспекта является то, что система определения положения включает в себя первую систему определения положения, которая получает информацию о положении корпуса сканера, и вторую систему, которая определяет положение "окошек" для электромагнитного излучения, а центральный процессор создает магнитно-томографическое изображение на основании измеренного электромагнитного поля и с учетом информации о положении корпуса сканера и «окошек», полученной от системы определения положения.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму шапки, которую можно надеть.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму рубашки, которую можно надеть.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму жилета, который можно надеть.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму рукава, который можно надеть.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму нательного белья, которое можно надеть. В качестве другого аспекта, нижнее белье, которое можно надеть, представляет собой бюстгальтер, который можно надеть.
Дополнительной характеристикой является то, что оборудование для передачи/приема электромагнитного излучения является переносным.
Дополнительной характеристикой является то, что оборудование для передачи/приема электромагнитного излучения представляет собой компактную сотовую базовую станцию.
Дополнительной характеристикой является то, что оборудование для передачи/приема электромагнитного излучения включает переносное передающее оборудование.
Дополнительной характеристикой является то, что оборудование для передачи/приема электромагнитного излучения включает переносное приемное оборудование.
Дополнительной характеристикой является то, что оборудование для передачи/приема электромагнитного излучения является отдельным от корпуса сканера элементом.
В целом, настоящее изобретение по другому аспекту представляет собой носимый корпус сканера, используемый для проведения электромагнитной томографии и включающий в себя: полую конструкцию, стенки которой формируют границу области сканирования и по меньшей мере частично сделаны из материала, непроницаемого для электромагнитного поля, создаваемого оборудованием, передающим и принимающим электромагнитное излучение; определенное количество «окошек» для электромагнитного излучения, распределенных по стенкам таким образом, чтобы полностью окружить область сканирования; и определенное количество микрошлюзов, открывающих и закрывающих «окошки», позволяющее регулировать моменты входа и/или выхода электромагнитного поля через «окошки».
Дополнительной характеристикой является то, что носимый корпус сканера адаптирован так, чтобы помещать внутрь него биологические объекты для проведения электромагнитной томографии с помощью «окошек» для электромагнитного излучения и микрошлюзов.
Еще одной характеристикой данного аспекта является то, что пространственное местоположение всех «окошек» для электромагнитного излучения является известным. Дополнительные характеристики также включают в себя следующее: каждое «окошко» для электромагнитного излучения может открываться и закрываться независимо от других, что позволяет контролировать вход и/или выход излучения через «окошко»; каждое «окошко» для электромагнитного излучения может быть открыто и закрыто независимо от других с помощью соответствующего микрошлюза; управление микрошлюзами может осуществляться таким образом, что электромагнитное поле в каждый отдельно взятый момент времени будет попадать в корпус сканера только через одно «окошко»; управление микрошлюзами может осуществляться таким образом, что электромагнитное поле будет попадать в корпус сканера через несколько «окошек" одновременно; управление микрошлюзами может осуществляться таким образом, что электромагнитное поле будет покидать корпус сканера только через одно «окошко» в каждый отдельно взятый момент времени; управление микрошлюзами может осуществляться таким образом, что электромагнитное поле будет покидать корпус сканера через несколько «окошек» одновременно; у каждого микрошлюза есть свой индивидуальный код; и/или в момент входа электромагнитного поля в корпус сканера через открытое «окошко» код микрошлюза открытого «окошка» присваивается электромагнитному полю.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму шапки, которую можно надеть.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму рубашки, которую можно надеть.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму жилета, который можно надеть.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму рукава, который можно надеть.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму нательного белья, которое можно надеть. В качестве другого аспекта, нижнее белье, которое можно надеть, представляет собой бюстгальтер, который можно надеть.
В широком смысле слова, данное изобретение по другому аспекту является способом электромагнитной томографии частей тела живого человека с использованием носимого корпуса сканера, и такой способ включает в себя следующие компоненты: установка носимого и переносного корпуса сканера таким образом, чтобы он облегал часть тела живого человека во время перемещения человека из одного места в другое; определение положения носимого корпуса сканера; создание электромагнитного поля, проходящего в носимый корпус сканера и выходящего из него; измерение электромагнитного поля после того, как оно было рассеяно/изменилось в результате интерференции со стороны части тела живого человека; и создание электромагнитного томографического изображения на основании созданного и измеренного электромагнитного поля с использованием информации об установленном положении.
Одной из характеристик данного аспекта является то, что этап установки носимого и переносного корпуса сканера включает установку носимого и переносного корпуса сканера, представляющего собой полую конструкцию, в стенках которой оборудован ряд «окошек», через которые проходит электромагнитное поле на этапе его генерации.
Дополнительной характеристикой данного аспекта является то, что стенки полой конструкции формируют границу области сканирования и по меньшей мере частично сделаны из материала, непроницаемого для электромагнитного поля, создаваемого оборудованием, передающим и принимающим электромагнитное излучение, и при этом «окошки» для электромагнитного излучения распределены по стенкам таким образом, чтобы полностью окружить область сканирования.
Еще одной дополнительной характеристикой данного аспекта является то, что способ также включает в себя этап использования информации о пространственном положении каждого из «окошек» для электромагнитного излучения. В качестве дополнительных характеристик, в состав способа также входит следующее: этап независимого открытия и закрытия «окошек» для электромагнитного излучения, что позволяет контролировать прохождение через «окошко» электромагнитного поля; этап независимого открытия и закрытия «окошек» осуществляется с помощью соответствующего микрошлюза, которым оборудовано каждое «окошко»; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле в каждый отдельно взятый момент времени попадает в корпус сканера только через одно «окошко»; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле попадает в корпус сканера через несколько «окошек» одновременно; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле покидает корпус сканера только через одно «окошко» в каждый отдельно взятый момент времени; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле покидает корпус сканера через несколько «окошек» одновременно; у каждого микрошлюза есть свой индивидуальный код; способ также включает этап, когда в момент входа электромагнитного поля в корпус сканера через открытое «окошко» код микрошлюза открытого «окошка» присваивается электромагнитному полю; способ также включает этап определения с помощью системы определения положения записанной информации о пространственном положении каждого из «окошек» для электромагнитного излучения; и/или способ также включает этап определения записанной информации о пространственном положении каждого из «окошек» для электромагнитного излучения без использования системы определения положения.
Еще одной характеристикой данного аспекта является то, что в состав способа также входит следующее: этап, на котором система определения положения получает информацию о положении корпуса сканера, а центральный процессор создает магнитно-томографическое изображение на основании измеренного электромагнитного поля и с учетом информации о положении корпуса сканера, полученной от системы определения положения.
Еще одной характеристикой данного аспекта является то, что в состав способа также входит следующее: этап, на котором система определения положения получает информацию о положении «окошек» для электромагнитного излучения, а центральный процессор создает магнитно-томографическое изображение на основании измеренного электромагнитного поля и с учетом информации о положении «окошек», полученной от системы определения положения.
Еще одной дополнительной характеристикой данного аспекта является следующее: этап определения положения носимого корпуса сканера включает определение, с помощью первой системы определения положения, положения корпуса сканера; этап определения положения носимого корпуса сканера также включает определение, с помощью второй системы определения положения, положений «окошек» для электромагнитного излучения; и этап создания магнитно-томографического изображения реализуется посредством центрального процессора на основании измеренного электромагнитного поля и с учетом информации о положении корпуса сканера и «окошек», полученной от системы определения положения.
Еще одной дополнительной характеристикой данного аспекта является то, что корпус сканера имеет форму шапки, которую можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение «шапки» живым человеком на голове.
Еще одной дополнительной характеристикой данного аспекта является то, что корпус сканера имеет форму рубашки, которую можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение «рубашки» живым человеком на теле.
Еще одной дополнительной характеристикой данного аспекта является то, что корпус сканера имеет форму жилета, который можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение «жилета» живым человеком на теле.
Еще одной дополнительной характеристикой данного аспекта является то, что корпус сканера имеет форму рукава, который можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение «рукава» живым человеком на руке.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму нательного белья, которое можно надеть. В качестве другого аспекта, нижнее белье, которое можно надеть, представляет собой бюстгальтер, который можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение бюстгальтера живым человеком на груди.
Дополнительной характеристикой данного аспекта является то, что этапы генерирования и измерения электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, и при этом такое оборудование, передающее и принимающее электромагнитное излучение, является переносным.
Дополнительной характеристикой данного аспекта является то, что этапы генерирования и измерения электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, и при этом такое оборудование, передающее и принимающее электромагнитное излучение, представляет собой компактную сотовую базовую станцию.
Дополнительной характеристикой данного аспекта является то, что этапы генерирования и измерения электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, и при этом такое оборудование, передающее и принимающее электромагнитное излучение, включает переносное передающее оборудование.
Дополнительной характеристикой данного аспекта является то, что этапы генерирования и измерения электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, и при этом такое оборудование, передающее и принимающее электромагнитное излучение, включает переносное приемное оборудование.
Дополнительной характеристикой данного аспекта является то, что этапы генерирования и измерения электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, и при этом такое оборудование, передающее и принимающее электромагнитное излучение, является отдельным от корпуса сканера элементом.
Дополнительной характеристикой данного аспекта является то, что этап создания магнитно-томографического изображения осуществляется центральным процессором.
В широком смысле слова, данное изобретение по другому аспекту является способом электромагнитной томографии биологического объекта с использованием корпуса сканера, и такой способ включает в себя следующие компоненты: применение корпуса сканера, представляющего собой полую конструкцию, стенки которой формируют границу области сканирования и по меньшей мере частично сделаны из материала, непроницаемого для электромагнитного поля, создаваемого оборудованием, передающим и принимающим электромагнитное излучение, и при этом у такой конструкции по стенкам оборудованы «окошки» для электромагнитного излучения таким образом, чтобы полностью окружить область сканирования; открытие одного или нескольких «окошек» образом, позволяющим контролировать вход и/или выход через них электромагнитного поля; создание электромагнитного поля, направляемого в носимый корпус сканера через открытые «окошки»; измерение электромагнитного поля после того, как оно было рассеяно/изменено в результате интерференции со стороны биологического объекта; и построение электромагнитных томографических изображений на основании созданного и измеренного электромагнитного поля.
Одной из характеристик данного аспекта является то, что носимый корпус сканера адаптирован так, чтобы помещать внутрь него биологические объекты для проведения электромагнитной томографии.
Еще одной характеристикой данного аспекта является то, что способ также включает в себя этап использования информации о пространственном положении каждого из «окошек» для электромагнитного излучения. В качестве дополнительных характеристик, в состав способа также входит следующее: этап независимого открытия и закрытия «окошек» для электромагнитного излучения, что позволяет контролировать прохождение через «окошко» электромагнитного поля; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле в каждый отдельно взятый момент времени попадает в корпус сканера только через одно «окошко»; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле в каждый отдельно взятый момент времени попадает в корпус сканера только через одно «окошко»; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле попадает в корпус сканера через несколько «окошек» одновременно; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле покидает корпус сканера только через одно «окошко» в каждый отдельно взятый момент времени; этап независимого открытия или закрытия «окошек» включает управление микрошлюзами таким образом, что электромагнитное поле покидает корпус сканера через несколько «окошек» одновременно; у каждого микрошлюза есть свой индивидуальный код; и/или способ также включает этап, когда в момент входа электромагнитного поля в корпус сканера через открытое «окошко» код микрошлюза открытого «окошка» присваивается электромагнитному полю.
Еще одной дополнительной характеристикой данного аспекта является то, что корпус сканера имеет форму шапки, которую можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение «шапки» живым человеком на голове.
Еще одной дополнительной характеристикой данного аспекта является то, что корпус сканера имеет форму рубашки, которую можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение «рубашки» живым человеком на теле.
Еще одной дополнительной характеристикой данного аспекта является то, что корпус сканера имеет форму жилета, который можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение «жилета» живым человеком на теле.
Еще одной дополнительной характеристикой данного аспекта является то, что корпус сканера имеет форму рукава, который можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение «рукава» живым человеком на руке.
Еще одной дополнительной характеристикой настоящего аспекта является то, что корпус сканера имеет форму нательного белья, которое можно надеть. В качестве другого аспекта, нижнее белье, которое можно надеть, представляет собой бюстгальтер, который можно надеть, и то, что этап установки носимого и переносного корпуса сканера включает ношение бюстгальтера живым человеком на груди.
В широком смысле слова, данное изобретение по другому аспекту представляет собой носимую/переносную систему для создания электромагнитных томографических изображений, включающую в свой состав носимый/переносной корпус сканера, рассчитанный на помещение в него биологического объекта; систему определения положения; оборудование для передачи и приема электромагнитного излучения, и центральный процессор. Оборудование для передачи и приема электромагнитного излучения все вместе создает электромагнитное поле, проходящее в корпус сканера, и измеряет электромагнитное поле после того, как оно было рассеяно/изменено в результате интерференции со стороны биологического объекта в корпусе сканера. Центральный процессор осуществляет построение электромагнитных томографических изображений на основании измеренного электромагнитного поля.
Характеристиками данного аспекта являются следующие: носимый/переносной корпус сканера представляет собой полую конструкцию, в стенках которой встроено определенное количество «окошек» для электромагнитного излучения, через которые будет входить и выходить электромагнитное поле; пространственное местоположение всех «окошек» для электромагнитного излучения является известным; и/или каждое «окошко» для электромагнитного излучения может открываться и закрываться независимо от других с помощью соответствующего микрошлюза.
Другими характеристиками данного аспекта являются следующие: управление микрошлюзами таким образом, что электромагнитное поле в каждый отдельно взятый момент времени попадает в корпус сканера только через одно «окошко»; у каждого микрошлюза есть свой индивидуальный код; корпус сканера имеет форму шапки, которую можно надеть; корпус сканера имеет форму рубашки, которую можно надеть; корпус сканера имеет форму жилета, который можно надеть; корпус сканера имеет форму рукава, который можно надеть; и/или корпус сканера имеет форму бюстгальтера, который можно надеть.
Другими дополнительными характеристиками данного аспекта являются то, что оборудование, передающее и принимающее электромагнитное излучение, является переносным; и/или то, что оборудование, передающее и принимающее электромагнитное излучение, представляет собой компактную сотовую базовую станцию.
В целом, настоящее изобретение по другому аспекту представляет собой носимую/переносную установку электромагнитной томографии в соответствии с ее изображениями и описанием.
В целом, настоящее изобретение по еще одному аспекту представляет собой носимый корпус сканера для использования при создании электромагнитных томографических изображения, в соответствии с его изображениями и описанием.
В целом, настоящее изобретение по еще одному аспекту включает в себя способ работы носимого/переносного корпуса сканера для электромагнитной томографии в соответствии с его изображениями и описанием.
Прочие области возможного применения данного изобретения станут очевидными после ознакомления с подробным описанием, приведенным ниже. Мы подчеркиваем, что подробное описание и конкретные примеры дают понимание наиболее предпочтительных областей использования изобретения, но приводятся исключительно в качестве иллюстрации и не призваны ограничивать объем изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прочие аспекты, возможности применения и преимущества данного изобретения станут очевидными из следующего подробного описания со ссылкой на следующие чертежи, на которых:
ФИГ. 1 представляет графическую иллюстрацию принципа электромагнитной томографии (ЭМТ);
ФИГ. 2 представляет схематическое изображение одного возможного варианта реализации разработанной ранее электромагнитной полевой томографической спектроскопической системы;
ФИГ. 3 представляет схематическое изображение работы системы из ФИГ. 1 при построении двухмерного изображения;
ФИГ. 4 представляет схематичное изображение настройки системы из ФИГ. 2 для работы в режиме создания трехмерных изображений;
ФИГ. 5 представляет принципиальную схему носимой/переносной установки электромагнитной томографии в приоритетном техническом исполнении настоящего изобретения;
ФИГ. 6 представляет схематическое изображение работы системы из ФИГ. 5 при построении двухмерного изображения;
ФИГ. 7 представляет вид сбоку носимого корпуса сканера в форме шапки в соответствии с одним или несколькими приоритетными техническими исполнениями настоящего изобретения;
ФИГ. 8A и 8B представляют графические иллюстрации примерных кодов шлюзов в корпусе сканера из ФИГ. 6;
ФИГ. 9A представляет принципиальную схему, иллюстрирующую использования концепции кодирования EMWindows;
ФИГ. 9B представляет принципиальную схему, иллюстрирующую кодирование со сдвигом частот EMWindows;
ФИГ. 10 представляет принципиальную схему, иллюстрирующую кодирование EMWindows вместе с преобразованием частоты;
ФИГ. 11 представляет блок-схему, иллюстрирующую работу центрального процессора из ФИГ. 5;
ФИГ. 12A представляет блок-схему примера способа решения прямой задачи при опциональном использовании в процессе создания изображения;
ФИГ. 12B представляет блок-схему примера способа решения обратной задачи при опциональном использовании в процессе создания изображения;
ФИГ. 12С представляет блок-схему примера способа расчета градиента при опциональном использовании в процессе создания изображения;
ФИГ. 13 представляет наглядную иллюстрацию затрат времени при использовании системы ЭМТ, включая «шапку» из ФИГ. 7, при сканировании головы человека при наличии у пациента симптомов инсульта; и
ФИГ. 14 представляет схематичное изображение, иллюстрирующее использование системы и способов из ФИГ. 5-12C в работе примерной системы создания четырехмерных дифференциальных (динамических) ЭМТ изображений.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Мы хотим начать со слов о том, что любой человек, имеющий общее представление о предмете вопроса ("Лицо, разбирающееся в предмете вопроса"), легко поймет то, что данное изобретение имеет большой спектр применения и потенциал. Кроме того, любое рассмотренное практическое воплощение, которые было признано "приоритетным", считается частью наиболее оптимального способа использования, предусмотренного как инструмент для применения настоящего изобретения. Также в качестве дополнительных иллюстраций могут рассматриваться и другие практические воплощения, что позволит предоставить полную и полезную с практической точки зрения характеристику изобретения. Следует понимать, что при той или иной реализации может быть использован как один, так и несколько описанных выше аспектов изобретения, а также могут задействоваться как одна, так и несколько из описанных выше характеристик. Кроме того, многие воплощения, такие как адаптации, вариации, модификации и аналогичные им изменения, будут косвенно раскрыты в составе рассмотренных в настоящем документе практических воплощений, и они также входят в рамки настоящего изобретения.
Соответственно, хотя настоящее изобретение подробно описывается в данном документе в виде одного или нескольких воплощений, понимается, что данная информация является иллюстративной, представляет собой примеры использования изобретения и приводится только для того, чтобы предоставить полное и полезное с практической точки зрения описание изобретения. Подробная раскрытая в настоящем документе информация в отношении одного или нескольких практических воплощений не призвана и не может толковаться как ограничивающая объем патентной защиты данного изобретения, и объем такой защиты должен определяться патентными формулами и их эквивалентами. Мы не рассчитываем на то, что объем патентной защиты данного изобретения будет определяться с ограничением какой-либо формулы положениями настоящего документа, которые не вошли непосредственно в саму патентную формулу.
Таким образом, например, любая очередность и/или временная последовательность действий в составе различных процессов или способов, которые описаны в настоящем документе, является иллюстративной и не носит характер ограничения. Соответственно, следует исходить из того, что хотя действия в рамках различных процессов или способов могут быть показаны и описаны в качестве некоей последовательности или временного порядка, действия в рамках такого процесса или способов не ограничиваются совершением их в какой-либо конкретной последовательности или порядке, если не указано иное. На самом деле, действия в составе таких процессов или способов могут в целом осуществляться в различной очередности или последовательности, но все равно являться частью настоящего изобретения. Соответственно предполагается, что объем патентной защиты данного изобретения определяется по прилагаемым патентным формулам, а не по описанию, приведенному в настоящем документе.
Кроме того, важно отметить, что каждый термин, используемый в настоящем документе, ссылается на то, что будет понято Лицом, разбирающемся в предмете вопроса, как значение такого термина в контексте его использования. Если значение какого-либо термина, используемого в настоящем документе (и понятого Лицом, разбирающемся в предмете вопроса, с учетом его контекста), отличается каким-либо образом от конкретного словарного определения такого термина, то мы исходим из того, что приоритетный характер должно иметь значение, в котором этот термин поняло Лицо, разбирающееся в предмете вопроса.
Что касается применимости 35 U.S.C. §112, ¶6, никакие компоненты патентной заявки не предполагают их толкование в соответствии с настоящим положением законодательства, если в отношении такого компонента заявки не указано непосредственно, что он “означает для целей» или «предусматривает применение», и в таком случае указанное положение законодательства должно применяться при толковании данного компонента заявки.
Кроме того, важно отметить, что при использовании в настоящем документе термины "какой-либо" и "какая-либо" в целом означают "по меньшей мере один/одна", и не исключают наличия множества таких объектов, если контекстом не продиктовано иное. Соответственно, ссылка на "корзину для пикника с яблоком внутри" является описанием "корзины для пикника с по меньшей мере одним яблоком внутри", а также "корзины для пикника с яблоками внутри". И наоборот, ссылка на "корзину для пикника с одним яблоком внутри" является описанием "корзины для пикника с только одним яблоком внутри".
При использовании в настоящем документе в качестве союзного слова для объединения перечисляемых позиций "или" означает "по меньшей мере один из предметов", но не исключает допустимости наличия нескольких предметов из списка. Таким образом, ссылка на "корзину для пикника с сыром или крекерами внутри" является описанием "корзины для пикника с сыром, но без крекеров внутри", "корзины для пикника с крекерами, но без сыра внутри", и "корзины для пикника и с сыром, и с крекерами внутри". И наконец, при использования для объединения перечисляемых позиций "и" означает "все предметы из списка". Таким образом, ссылка на "корзину для пикника с сыром и крекерами внутри" является описанием "корзины для пикника с сыром внутри, а также корзины для пикника, внутри которой есть еще и крекеры", и описанием "корзины для пикника с крекерами внутри, а также корзины для пикника, внутри которой есть еще и сыр".
Ниже мы рассматриваем схемы, в которых одинаковыми номерами обозначены одни и те же компоненты на различных изображениях, и описываем приоритетные практические воплощения данного изобретения. Приводимое далее описание одного или нескольких приоритетных воплощений является только примером по своему характеру и ни при каких обстоятельствах не должно ограничивать характер данного изобретения, его применение или формы использования.
ФИГ. 5 представляет принципиальную схему 110 носимой/переносной установки электромагнитной томографии в приоритетном техническом исполнении настоящего изобретения. Система 110 содержит корпус сканера 112, систему определения положения 180, передающее и приемное оборудование 126, в состав которого входят передатчик и приемник, и центральный процессор 128. Все эти компоненты более подробно описываются ниже.
ФИГ. 6 представляет схематическое изображение работы корпуса сканера 112 и передающего и приемного оборудования 126 из ФИГ. 5 при построении двухмерного изображения. В отличие от разработанных ранее инновационных систем, передающее и приемное оборудование 126 является отдельным компонентном по отношению к корпусу сканера 21. По меньшей мере в некоторых вариантах реализации передающее и приемное оборудование 126 является переносным. При использовании в настоящем документе термин «переносной» означает то, что соответствующий компонент может поднимать и носить один человек. В некоторых вариантах реализации передающее и приемное оборудование 126 может иметь форму компактной сотовой базовой станции или «малой соты», например, фемтосоты. В некоторых вариантах реализации передатчик и приемник являются отдельными устройствами, тогда как в других вариантах они объединены в одно устройство.
Корпус сканера 112 представляет собой переносную полую конструкцию, стенки которой выполнены из материала или материалов, которые являются непрозрачными (непроницаемыми) для электромагнитных волн и тем самым определяют границы области сканирования 21 в системе 110. Корпус сканера 112 сам по себе может иметь различные виды или формы. По меньшей мере в некоторых вариантах реализации корпус сканера 112 имеет форму одежды или иного предмета, который человек может надеть на себя. Например, корпус сканера 112 может иметь форму специальной рубашки, жилета, рукава, бюстгальтера или иного элемента нижнего белья, головного убора и пр. В этой связи ФИГ. 7 представляет собой вид сбоку носимого корпуса сканера в форме шапки 112 в соответствии с одним или несколькими приоритетными техническими воплощениями настоящего изобретения;
Безотносительно к его форме, стенки корпуса сканера 112 оборудованы N числом точек или «окошек», прозрачных для электромагнитного излучения 148 (т.е. точками входа и выхода электромагнитного излучения) и распределенных так, чтобы окружить область сканирования 21. В некоторых вариантах реализации схема размещения точек или «окошек» 148 может быть повторяющейся. В других вариантах реализации схема размещения точек или «окошек» 148 может не повторяться. Состояние («открыто» или «закрыто») каждой точки или «окошка» для входа/выхода излучения 148 может контролироваться устройством с микрочипом 132. По меньшей мере в некоторых вариантах реализации состояние каждой точки или «окошка» для входа/выхода излучения («открыто» или «закрыто») 148 кодируется индивидуально. Комбинация точек или "окошек" для входа/выхода электромагнитного излучения 148 и соответствующих им микрочипов 132 периодически в настоящем документе именуется «EMWindows» 150. Во время работы корпус сканера 112 размещается вокруг исследуемого объекта 19, или же объект 19 помещается внутрь корпуса сканера 112, и запускается система 110. Во время работы системы 10 передатчик в составе передающего и приемного оборудования 126 используется для создания электромагнитного поля, проходящего через одну или несколько точек входа 148 внутрь области сканирования 21. После взаимодействия с исследуемым объектом 19 каждое измененное в результате интерференции или рассеянное электромагнитное поле (E sct) проходит через одну или несколько точек выхода, где оно затем измеряется передающим/приемным оборудованием 126. Измерение компонента излучения, соответствующего прохождению от каждой точки входа (hole_i, где 0<i≤N) до каждой точки выхода (hole_j, где 0<j≤N) и учет информации о каждой соответствующей точке входа и выхода 148, как описывается ниже, позволяют установить и создать точное изображение объекта 19 в области сканирования 21.
Для упрощения использования информации об изменившемся в результате интерференции или рассеянном электромагнитном поле (E sct) для корректного установления того, как в двухмерном или трехмерном измерениях объекта 19 распределились его диэлектрические свойства и, соответственно, для создания двухмерного или трехмерного изображения объекта 19, могут использования устройства на базе микрочипов 132, которые могут контролировать нюансы работы EMWindows 150. По меньшей мере в некоторых вариантах реализации у каждого EMWindow 150 есть «умный» шлюз, иногда именуемый «микровыключателем» или «микрошлюзом», который может использоваться устройством с микрочипом 132 для открытия или закрытия точек входа/выхода излучения. В составе шлюзов могут использоваться регулируемые резистивные диоды. Использование таких шлюзов позволяет изменять количество точек/«окошек» входа и выхода 148, которые открыты или закрыты в определенный момент времени. В частности, конкретные точки или «окошки» входа и выхода 148, которые открыты или закрыты в любой отдельно взятый момент времени, могут контролироваться или определяться с использованием технологии управления, описанной в общих чертах ниже, и такая информация может координироваться с соответствующими измерениями E sct.
По меньшей мере в некоторых из таких вариантов реализации определение параметров излучения по каждой уникальной паре точек входа/выхода (i,j) может быть обеспечено за счет кодирования соответствующих шлюзов и затем применения кодировки к электромагнитному (ЭМ) излучению/волнам/полям. Это может быть обеспечено за счет, например, использования технологии кодового разделения. Такая технология описывается, например, в указанном выше Патенте США № 7,239,731. ФИГ. 8A и 8B находятся представляют собой графические иллюстрации примерных кодов шлюзов I и J в корпусе сканера из ФИГ. 6, а ФИГ. 9A представляет собой принципиальную схему, иллюстрирующую использование концепции кодирования EMWindows. Как показано на ФИГ. 9A, передатчик в составе передающего и приемного оборудования 126 генерирует электромагнитное (ЭМ) излучение/волны/поля, которые представлены комбинированным сигналом E. Когда ЭМ волны проходят внутрь области сканирования 21 через одно из N количества EMWindows (EMWindow_i) 150, сигнал E кодируется как E(Ci). Кодированный сигнал E(Ci) проходит через область сканирования 21, взаимодействует с тканями во множестве точек в пространстве (x,y,z) и, таким образом, получает информацию о пространственном распределении диэлектрических свойств тканей ε(x,y,z) для получения в результате E(Ci, ε(x,y,z)). ЭМ волны затем покидают область сканирования 21 через какое-либо EMWindow (EMWindow_j) 150 (им может быть то же самое «окошко» EMWindow_j, через которое волна вошла в область сканирования, хотя эта информация будет иметь несущественную ценность), где сигнал будет снова кодироваться с получением в результате E(Ci, ε(x,y,z), Cj). Когда в итоге ЭМ излучение будет измеряться на приемном оборудовании, оно будет нести в себе сигнатуры конкретной пары точек входа и выхода. Декодирование сигнатур позволяет получить кластер сводных первичных данных по конкретной паре точек входа и выхода (i,j). Эти данные затем объединяются с информацией о пространственном расположении точек i и j (данная информация устанавливается, например, с помощью блока определения положения EMWindow 310 из ФИГ. 11, о котором говорится ниже). В совокупности, этот набор данных (т.е. кластер сводных первичных данных и сведения о пространственном расположении «виртуальных передатчиков» или «передающих окошек» (EMWindow_i в данном примере) и «виртуальных приемников» или «приемных окошек» (EMWindow_j в данном примере)) аналогичен набору данных, которые генерируются и обрабатываются разработанными ранее системами ЭМТ (например, кластер сводных первичных данных, объединяемый с данными о пространственном положении фактических передатчиков и «окошек»). Набор данных передается на один или несколько компьютеров в составе центрального процессора 128, которые будут обрабатывать данные для формирования изображения объекта 19, находящегося в области сканирования 21. Как и в разработанных ранее инновационных системах, в рамках данного процесса используется так называемый «обратный" алгоритм.
В дополнение или вместо кодирования шлюзов как «открытых или закрытых», по меньшей мере в некоторых вариантах реализации определение параметров излучения для каждой уникальной пары точек входа/выхода (i,j) может быть обеспечено за счет использования частотного сдвига при кодировании со сдвигом частот (FSK) или использовании сходного принципа. ФИГ. 9B представляет собой принципиальную схему, иллюстрирующую кодирование со сдвигом частот EMWindows; Как показано на этом рисунке, частотный сдвиг осуществляется при каждом открытии «окошка» на вход ЭМ излучения (EMWindow_i), и частота сдвигается на определенную величину ΔFreq_i, и при каждом открытии «окошка» на выход ЭМ излучения (EMWindow_j), при котором частота сдвигается на определенную величину ΔFreq_j.
В некоторых вариантах реализации точки или «окошки» входа и выходы ЭМ излучения 148 открываются по одному, так что в любой отдельно взятый момент проведения измерений на вход излучения открыта только одна точка или «окошко» 148, и на выход открыта тоже только одна точка или «окошко» 148. В других вариантах реализации при проведении по меньшей мере части измерений будет открыта на вход более чем одна точка или «окошко» 148, более чем одна точка или «окошко» на выход 148, или будут открыты более чем по одной точке или «окошку» на вход и выход одновременно. В некоторых таких вариантах реализации все точки или «окошки» 148 открыты по меньшей мере во время проведения части или всех измерений.
Если конкретные EMWindows 150, которые открыты в момент каждого из измерений E sct, известны, и положение открытых точек или «окошек» 148 на момент проведения таких измерений тоже известно, то результаты измерений могут быть использованы для получения точного изображения объекта 19 в области сканирования 21. Что касается положений открытых точек или «окошек» 148, то местоположение точек или «окошек» 148 должно быть либо известно заранее, либо должно устанавливаться в ходе проведения измерений. В некоторых вариантах реализации корпус сканера 112 в целом имеет жесткую конструкцию, и места точек или «окошек» 148 являются фиксированными по отношению друг к другу благодаря жесткой конструкции корпуса сканера 112. В других вариантах реализации корпус сканера 112 имеет нежесткую конструкцию, места точек или «окошек» 148 не являются фиксированными и, соответственно, должны быть определены. В любом случае, поскольку в приоритетном варианте корпус сканера 112 должен быть переносным, а во многих вариантах реализации он может часто перемещаться с места на место, функция определения положения корпуса сканера 112 и положения точек или "окошек" 148 от отношению к корпусу сканера 112 представляется полезной. Определение положения корпуса сканера 112 и/или положений точек или «окошек» 148 более подробно описывается ниже.
Вопросы, связанные с силой сигнала
Необходимо учитывать требования по силе сигнала, предъявляемые к передающему и приемному оборудованию 126. В примерном варианте реализации передатчик будет генерировать излучение в направлении биологического объекта через EMWindows 150, сопоставимое с излучением обычного мобильного телефона. При использовании существующих технологий максимальная мощность будет в диапазоне от +33 дБм (2Вт) до +36 дБм (4Вт), что соответствует одобренным предельным уровням мощности мобильного телефона в стандарте GSM850/900 (+33 дБм) и в стандарте UMTS/3G (мобильный телефон Класса 1 по мощности).
Если исходить из того, затухание сигнала на EMWindows варьируется от 0 до 20дБ, то затухание сигнала в биологическом объекте (им может быть целый организм, но, с большей вероятностью, это будет часть организма, такая как рука или нога человека) должно быть от -60 дБ до -100 дБ. Соответственно, мощность сигнала после прохождения через биологический объект составит от -24 дБм до -87 дБм. Кроме того, если предположить, что сигнал затухает примерно на 20-30 дБм при прохождении от объекта к приемнику, то оцениваемый уровень сигнала на Rx (приемнике) (без усиления со стороны корпуса сканера 112) составляет от -44дБм до -117 дБм.
Для сравнения, обычная мощность сигналов, принимаемых по беспроводной связи в различных сетях 802.11 с использованием доступных рядовому пользователю устройств, составляет от -60 дБм до -80 дБм. Мощность обычного принятого сигнала от спутника GPS составляет -127 дБм, а нижний порог тепловых помех в полосе 1 Гц при комнатной температуре составляет -174 дБм.
Поскольку предположительный минимальный уровень сигнала составляет порядка -117 дБм и предположительный динамический диапазон при статическом положении объекта составляет порядка 53 дБ, уровень сигнала и динамический диапазон считаются укладывающимися в пределы параметров работы современных телекоммуникационных технологий и могут не требовать усиления сигналов в корпусе сканера 112. Однако, если усиление сигнала является желательным или предпочтительным, это может быть реализовано в составе или на базе устройства с микрочипом 132. Например, компактные малошумные усилители (МШУ) находятся в свободной продаже. Линейка усилителей, подходящих для использования в приоритетных вариантах реализации настоящего изобретения - малошумные усилители MAX2686/MAX2688, разработанные для использования в системе GPS L1, в Galileo и в приложениях ГЛОНАСС. Габариты таких усилителей - 0,86 мм × 0,86 мм × 0,65 мм, производитель - Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086.
Вопросы частоты сигналов
Между различными EMWindows 150, как внутри корпуса сканера 112, так и за его пределами, могут происходить интерференция сигналов или паразитное перекрестное взаимодействие.
Внутри корпуса сканера 112 между EMWindows 150 могут иметь место прямое влияние, взаимное влияние или интерференция. В частности, сигнал E или E(Ci), входящий в область сканирования 21, может по меньшей мере в некоторых ситуациях огибать, но не проходить сквозь исследуемый объект 19, и тем самым вступать в интерференцию с интересующим сигналом, т.е. сигналом E(ε(x,y,z)) или E(Ci,ε(x,y,z)), который проходит через исследуемый объект 19. По меньшей мере в некоторых вариантах реализации данная проблема может решаться с помощью специальной среды, в которой сигналы будут «согласовываться или разделяться» (не показано). Такая среда может устранять прямую или взаимную интерференцию, вызванную сигналами E или E(Ci), огибающими исследуемый объект 19. Одним из примеров такой среды является гель с высоким содержанием соли.
Что касается пространства на пределами корпуса сканера 112, то сигнал E, передаваемый передающим оборудованием, может по меньшей мере в нескольких ситуациях быть мощным и выступать паразитным по отношению к сигналу E(ε(x,y,z)) или E(Ci,ε(x,y,z)), проходящему через область сканирования 21, и тем самым он будет создавать помехи такому сигналу, принимаемому приемным оборудованием. Таким образом, по меньшей мере в некоторых вариантах реализации на каждом EMWindows 150 для входа излучения может использоваться частотный конвертер, который будет разделять частоту передатчика и частоту приемника, тем самым исключая интерференцию со стороны сигнала передатчика. Например, сигнал передатчика на частоте 0,5ГГц может пропускаться через удвоитель частоты, чтобы исследование объекта проводилось на частоте 1,0ГГц. Таким образом, ЭМ излучение будет проходить через область сканирования 21 на частоте исследования объекта и, аналогичным образом, через одно или несколько EMWindows 150 до момента приемки данного изучения на той же частоте.
Преобразование частоты может использоваться совместно с кодированием на шлюзе, описанном выше. ФИГ. 10 представляет собой принципиальную схему, иллюстрирующую кодирование EMWindows вместе с преобразованием частоты. Как и в случае кодирования EMWindows, показанного на ФИГ. 9A, передатчик в составе передающего и приемного оборудования 126 генерирует электромагнитное (ЭМ) излучение/волны/поля, которые представлены комбинированным сигналом E. Частота передачи обозначается Freq_Tx. Когда ЭМ волны проходят внутрь области сканирования 21 через одно из EMWindows (EMWindow_i) 150, сигнал E кодируется как E(Ci), а частота сдвигается на определенную величину ΔFreq_i. Кодированный сигнал E(Ci) проходит через область сканирования 21, взаимодействует с тканями во множестве точек в пространстве (x,y,z) и, таким образом, получает информацию о пространственном распределении диэлектрических свойств тканей ε(x,y,z) для получения в результате E(Ci, ε(x,y,z)) на частоте Freq_Tx + ΔFreq_i. ЭМ волны затем покидают область сканирования 21 через какое-либо EMWindow (EMWindow_j) 150, где сигнал будет снова кодироваться с получением в результате E(Ci, ε(x,y,z), Cj). Когда ЭМ излучение в итоге принимается на приемном оборудовании, все еще на частоте Freq_Tx + ΔFreq_i, оно все еще несет в себе уникальные сигнатуры конкретной пары точек входа и выхода, но также и имеет сдвиг по частоте на величину ΔFreq_i.
В одном из примеров частота передачи (Freq_Tx) составляет 0,5ГГц, и сдвиг частоты производится по каждой точке входа ЭМ излучения (EMWindow_i), в результате чего частота сигнала для создания изображения (Freq_imaging) повышается до 1ГГц. В этой связи предполагается, что частота может сдвигаться и далее, по меньшей мере до 2,5ГГц.
Также предполагается, что в соответствии с принципом взаимности:

Таким образом, уникальность кодирования каждой пары EMWindows (Ci,Cj) не зависит от того, как ЭМ волна попадает в область сканирования 21, если считать «абсолютно» совпадающими электромагнитные и геометрические параметры «окошек» и то, что ЭМ волна в направлении объекта имеет форму плоской волны.
Частотный конвертер может быть как активным, так и пассивным. Примером пассивного и имеющегося в свободной продаже удвоителя частоты, который может использоваться для целей настоящего изобретения, является миниатюрный Hittite HMC156AC8. Также могут существовать и другие электронные компоненты, и предполагается, что в качестве частотного конвертера может выступать любой подходящий умножитель частоты, повышающий конвертер, понижающий конвертер или сходное оборудование.
Могут возникать и иные вопросы, связанные с интерференцией вне корпуса сканера 112. В некоторых вариантах реализации передающее оборудование может иметь возможность работы на передачу на нескольких частотах одновременно. По меньшей мере в некоторых из таких вариантов реализации пользователь может выбирать или настраивать частоту передачи так, чтобы избежать интерференции с другими сигналами, которые могут существовать в тот момент. Аналогично этому, в некоторых вариантах реализации может быть предусмотрено несколько частотных конвертеров или частотных конвертеров, которые могут изменять частоту на различные величины, и по меньшей мере в некоторых из таких вариантов реализации пользователь может выбирать или настраивать величину сдвига так, чтобы избегать интерференции.
Корпус сканера
Для того чтобы получить корректные данные и корректно построить изображение, важно знать или иметь возможность определить точное положение корпуса сканера 112 и в итоге знать или иметь возможность определить точное положение точек или «окошек» входа и выхода 148. По меньшей мере в некоторых вариантах реализации положение корпуса сканера 112 в границах заданного рабочего пространства, такого как кабинет, может быть определено, а положение точек или "окошек" 148 входа и выхода излучения на корпусе сканера или в составе корпуса сканера будет определяться по отношению к корпусу сканера 112 для того, чтобы в итоге можно было получить данные о положении точек или «окошек» 148 входа и выхода в границах рабочего пространства. В качестве дополнительного или альтернативного варианта положение корпуса сканера 112 по отношению к передающему и приемному оборудованию 126 может быть установлено, а положение точек или "окошек" 148 входа и выхода излучения на корпусе сканера или в составе корпуса сканера 112 будет определяться по отношению к корпусу сканера 112 для того, чтобы в итоге можно было получить данные о положении точек или «окошек» 148 входа и выхода по отношению к передающему и приемному оборудованию 126.
Система определения положения 180 может быть использована для определения точного положения сканера 112. В этой связи в составе системы определения положения 180 могут задействоваться процессы и технологии, сходные с используемыми в системах GPS, но масштабированные для работы в локальном режиме, когда данные по позиционированию будут доступны напрямую, либо в режиме «онлайн», либо иным образом. Точность определения положения в пространстве, необходимая для получения осмысленных результатов, может существенно отличаться, и при этом наблюдается важная зависимость между точностью определения положения и точностью результирующих данных и изображения. Таблица 1 иллюстрирует требуемую точность определения положения корпуса сканера 112 для нескольких различных взятых в качестве примера передающих частот.
[мм]
Аналогичным образом, точность данных и изображения также зависят от точности информации о форме и размерах точек или "окошек" для ЭМ излучения 148. Таблица 2 иллюстрирует точность данных о форме и расположении точек или "окошек" для ЭМ излучения 148 по отношению к корпусу сканера 112 для нескольких различных взятых в качестве примера передающих частот.
[см]
Сложность обеспечения точности информации о положении точек или «окошек» 148 для входа и выхода ЭМ излучения зависит, по меньшей мере частично, от типа используемого корпуса сканера 112. Например, корпус сканера 112 может иметь нежесткую или жесткую конструкцию. Примеры жесткой конструкции - шлем, рукав, бюстгальтер, жилет или что-то аналогичное. Примечательно, что сканеры с жесткой конструкцией не обязательно должны быть негибкими, но в целом должны быть неэластичными. Одним из преимуществ корпуса сканера 112 с жесткой конструкцией является то, что точное положение в трех измерениях всех точек или «окошек» для ЭМ излучения 148 по отношению к корпусу сканера 112 в целом известно заранее. Однако, в случае корпуса сканера 112 с жесткой конструкцией может потребоваться нанесение более широкого или толстого слоя вещества для «согласования/разделения» сигналов.
Примеры корпуса сканера с нежесткой конструкцией - шапка, «эластичный» рукав, «эластичный» бюстгальтер, «эластичный» жилет или что-то аналогичное. В отличие от сканеров с жесткой конструкцией, преимуществом сканеров с нежесткой конструкцией 112 является необходимость использовать меньший объем или слой вещества для «разделения» сигналов. (Примечательно, что по меньшей мере в некоторых вариантах реализации слой вещества для разделения сигналов используется даже тогда, когда корпус сканера 112 плотно прилегает к исследуемому объекту, поскольку, как указывалось ранее, важной функцией вещества для «разделения» является разделение прямой (происходящей вокруг объекта 19) взаимной интерференции между сигналами EMWindows 150 внутри корпуса сканера 112.) Другим преимуществом является то, что корпус сканера 112 с нежесткой конструкцией удобнее носить, т.е. в нем человеку проще работать, бегать, спать и вообще совершать какие-либо движения. С другой стороны, серьезным недостатком корпуса сканера 112 с нежесткой конструкцией является то, что точное положение в трех измерениях всех точек или «окошек» 148 для ЭМ излучения по отношению к корпусу сканера 112 в целом не будет известно и должно быть установлено/определено каждый раз при проведении измерений.
Одним из подходов, который может оказаться особенно полезным в случае корпусов сканера с нежесткой конструкцией (и который может применяться и в случае корпусов сканера с жесткой конструкцией), является осуществление процедуры определения вводной пространственной информации об ЭМ сигналах в два этапа. На первом этапе точное положение в трех измерениях всех точек или «окошек» 148 для ЭМ излучения в корпусе сканера 112 определяется для теоретической ситуации, когда корпус сканера 112 находится на объекте 19 «стандартного» размера или облегает его. Эти данные заносятся в память системы 110. Когда корпус сканера 112 находится на реальном объекте 19, фактическое расположение точек или «окошек» 148 для ЭМ излучения будет немного отличаться от теоретических, «стандартных» координат, однако данные о теоретическом местоположении могут использоваться в качестве отправной точки для последующего уточнения пространственных координат. При этом процесс работы значительно улучшится и ускорится. Уточнение пространственных координат в приоритетном варианте должно осуществляться по трем измерениям с точностью, не меньшей, чем габариты точки или «окошка» 148 для ЭМ излучения. Система определения положения 180 может использовать систему локального (например, в пределах кабинета) определения положения по типу GPS, алгоритм «пчелиных сот», когда после того, как было определено положение одной ячейки, определяется и положение соседних ячеек, или же иную подходящую систему или подход.
Для оперативного определения положения в трех измерениях (x,y,z), а также для осуществления корректировки с учетом фазового сдвига пути EMWindow_i - приемник и корректировки амплитуды и фазы у входящего сигнала на EMWindows 150 при изменении частоты, может использоваться программное обеспечение. По меньшей мере в некоторых вариантах реализации предполагается, что амплитуда будет одинаковой для всех EMWindow_i's (i=1..N).
Обработка данных
Центральный процессор 128 (также именуемый «процессор») представляет собой центр обработки, где производится предварительная обработка полученных данных, создаются изображения и выполняется их последующая обработка. По меньшей мере в некоторых вариантах реализации все программное обеспечение для обработки данных и создания изображений расположено в центральном процессоре 128, и его работа контролируется единым центром в коммерческих, исследовательских и других целях.
Данные могут передаваться с передающего/приемного оборудования 126 в центральный процессор 128 несколькими способами. В различных вариантах реализации данные могут передаваться с использованием одной или нескольких традиционных технологий, включая технологию мобильной телефонной связи, другие технологии беспроводной связи (например, Wi-Fi) и/или через высокоскоростное проводное соединение.
По меньшей мере в одном из вариантов реализации данные обрабатываются непосредственно в передающем/приемном оборудовании 126 или устройстве, напрямую подсоединенном к нему. Если у передающего/приемного оборудования 126 или другого устройства имеется дисплей, то это дает возможность подготовить и вывести изображение непосредственно на экран устройства без использования центрального процессора. Однако ресурсы таких устройств по обработке данных могут быть недостаточными для быстрого или достаточно точного создания изображения, позволяющего использовать его необходимым образом. Кроме того, поскольку централизованный контроль не осуществляется при таком варианте, такой вариант работы быть нецелесообразен с коммерческой точки зрения и/или по другим причинам. Таким образом, если для вывода на экран изображения пользователю или пациенту используется передающее/приемное оборудование 126 или другое устройство, может быть предпочтительно направлять данные в центральный процессор 128, как описано ниже, а затем направлять изображение обратно, если необходимо. Процессор 128 обеспечивает желаемую эффективность, точность и контроль, позволяющие преодолеть указанные выше недостатки.
Создание изображений в центральном процессоре
На ФИГ. 11 представлена блок-схема работы центрального процессора 128 из ФИГ. 5, соответствующая одному или нескольким приоритетным вариантам реализации настоящего изобретения. Как показано на этом рисунке, вводные параметры, включая частоту и диэлектрическую проницаемость (ε) среды соединения, вводятся в модель электромагнитных свойств EMWindow, которая создается на блоке 305. В модель EMWindow также заносятся данные о положении каждого из открываемых EMWindow (n=1..N) (EMW n (x,y,z)) в корпусе сканера 112, который на ФИГ. 11 указан как «границы области сканирования» («ГОС»). Эта информация генерируется на блоке 310. Для корпуса сканера с жесткой конструкцией изначальные положения EMWindow (EMW_init n (i,x,y,z)), показанные на блоке 315, могут быть достаточными, но для корпуса сканера с мягкой конструкцией может потребоваться уточнение положения, показанное на блоке 320, как описано выше. Модель EMWindow также включает в себя информацию о положении самого корпуса сканера 112 (ГОС(x,y,z)) в пределах общей области, получаемую на блоке 325.
Информация о положении EMWindow, модель электромагнитных свойств EMWindow, а также другие вводные параметры используются в процессе на блоке 330 при расчете «пустого» поля E_empty(i,j) (т.е. поля при пустой области сканирования 21) для каждой конкретной пары (i,j) «окошек» EMWindow (где i и j выбираются из общего количества «окошек» N). При этом осуществляются корректировки при трансформации электромагнитного поля на блоке 335, включая трансформацию как для участка от передатчика до корпуса сканера (ГОС), так и для участка от корпуса сканера до приемника, с использованием информации об относительном положении EMWindow и информации об абсолютном положении ГОС, полученной на блоках 310 и 325.
Поток необработанных комбинированных электромагнитных данных в блок обработки показан на блоке 340, с кодированием для каждой пары окон EMWindow на блоке 345. Расчет рассеянных в ходе исследования полей в области сканирования 21 по каждой паре окон EMWindow i,j (E_sct_exp(i,j)) выполняется на блоке 350 с использованием расчетных данных по «пустому» полю (E_empty(i,j)) с блока 330 и уточняющих данных с блока 335. Расчетные данные передаются на итерационный решатель обратных задач, показанный на блоке 355. Решатель обратных задач работает совместно с решателем прямых задач, показанным на блоке 360, который, в свою очередь, использует информацию по положению EMWindow с блока 310 для расчета результирующего 
Частично, работа системы центрального процессора 128 может основываться на процессе или процессах, описанных в Патенте США № 7,239,731 для решения обратной задачи томографии на основе электромагнитного поля. Решатель может представлять собой или включать, например, решатель трехмерных векторных задач (“3D”) в неупрощенной постановке с использованием уравнений Максвелла, или же решатель 3D скалярных задач в упрощенной поставке, или же решатель 2D скалярных задач в еще более упрощенной постановке. На ФИГ. 12A, 12B и 10C представлены блок-схемы этих опциональных процессов. Здесь используется итерационная процедура, основанная либо на градиентных, либо на ньютоновских уравнениях, или же используется упрощенный вариант на основе приближения Борна-Рытова. Если используется способ, не предполагающий приближений, то он должен по возможности иметь в том числе одну или несколько из следующих характеристик: (i) способ должен основываться на минимизации разницы между типовыми полями рассеяния и измеренными полями рассеяния; (ii) способ должен быть основан на способе регуляризации, таком как способ регуляризации Тихонова, один из его вариантов или аналогичный способ; (iii) должен использоваться один из типов расчетных сеток; (iv) одним шагом итеративной процедуры должно быть решение двух комплектов прямых задач того же порядка: моделирование т.т. «прямой волны» и моделирование "обратной волны"; (v) как прямая, так и обратная волны должны рассчитываться применительно к неотражающим или металлическим границам корпуса сканера; (vi) как прямая, так и обратная волны должны рассчитываться по единой прямоугольной сетке; (vii) для решения прямой задачи может использоваться способ сопряженных градиентов (“CGM”); (viii) на одном этапе CGM должно использоваться синус-преобразование Фурье; (ix) уравнение волны для неоднородных сред должно использоваться для решения прямой задачи.
С математической точки зрения способология, используемая для томографии на основе электромагнитного поля, представляет собой решение обратной задачи. Ее можно описать на основе комбинированных диэлектрических свойств ε и/или магнитных свойств μ и электрических и магнитных полей - E, H. Основой является набор максвелловских уравнений, как показано в уравнении (1) Патента США № 7,239,731, где E и H означают соответственно электрические и магнитные поля, а все остальные обозначения являются стандартными.
С практической точки зрения представляется разумным переписать эти уравнения в форму уравнений для неоднородной волны, как показано в уравнении 2 в Патенте США № 7,239,731, где
k 2 =(2π/λ) 2 εμ
а λ - длина волны в вакууме. Система томографического сканирования на основе электромагнитного поля может быть схематично представлена как камера с набором точек входа ЭМ излучения на ее поверхности. Как описывалось ранее, точки или «окошки» для ЭМ излучения 148 иногда функционируют как точки входа ЭМ поля, а иногда как точки выходы ЭМ поля. Представляется полезным разделить электрическое поле E на поле падающего излучения E 0 и рассеянное поле E s, как показано в уравнении (3) в Патенте США № 7,239,731, где j - номер конкретной точки входа или выхода ЭМ сигнала. Уравнение (2) может быть переписано в форме уравнения (4) в Патенте США № 7,239,731, где k 0 2 - номер волны для гомогенного вещества, а E 0j - поле, созданное EMWindow номер j.
Объект 19 может быть описан как распределение диэлектрической проницаемости в области сканирования 21.
Приемник фиксирует сигнал, который отражает как поля падающего излучения, так рассеянные поля.
Для того, чтобы решить уравнение 4, нам требуются данные о границах для того, чтобы ограничить масштабы вычислений. Для этой цели можно использовать как данные о неотражающих, так и отражающих (металлических) границах корпуса сканера. EMWindows в данном изобретении играют роль, аналогичную передающим или приемным антеннам в классических вариантах ЭМ томографии. По этой причине: i) должно быть известно пространственное расположение EMWindows (см. ФИГ. 11) и ii) должна быть создана математическая модель EMWindow как антенны. Для симуляции функционирования EMWindows как в режиме передачи, так и в режиме приема, может использоваться модель с источником в виде простой точки или электрического или магнитного диполя, модель с уравнением источника типа Кирхгофа или модель конечных элементов.
Решатель прямых задач
Существуют различные подходы к решению прямой задачи. В некоторых вариантах реализации может быть использован способ сопряженных градиентов с предварительной обработкой. Для этого уравнение (4) может быть переписано в форме, приведенной в уравнении (8) в Патенте США № 7,239,731, где k av - это среднее значение k. Оператор предобусловливания может быть построен как первый шаг итеративного процесса, показанного в уравнении (9) в Патенте США № 7,239,731. Учитывая тот факт, что левая часть уравнения (8) представляет собой выражение с постоянным коэффициентом, уравнение (9) может быть решено на этапе 1575 с использованием синусоидального преобразования Фурье для случая с нулевыми граничными условиями по границе области расчетов. Затем применяется способ Р.А. Джеймса (изначально изобретенный для статических задач, но впоследствии развитый для электромагнитных задач) для того, чтобы граничные условия не отражались. Этот прием создает очень надежный и эффективный способ. Вычислительные эксперименты показывают, что итеративный процесс работает при любых разумных контрастах и обеспечивает учет неотражающих условий с очень высокой степенью точности. Использование синусоидального преобразования Фурье на этапе 1575 может ускорить расчеты в 8 раз по сравнению со стандартным подходом Фурье.
На ФИГ. 12A представлена блок-схема примера способа решения прямой задачи 1535 при опциональном использовании в процессе создания изображения; Однако следует понимать, что могут использоваться другие подходы. Кроме того, по меньшей мере в некоторых вариантах реализации, решатель прямых задач 1535 используется только для решения обратных задач. Вводными данными в данном случае является распределение диэлектрических свойств в форме двухмерного или трехмерного массива, который получатся на этапе 1560. На первом этапе итерации такие вводные данные могут быть получены извне, в некоторых вариантах реализации в таком качестве может быть взято равномерное распределение диэлектрических свойств фоновой среды (или среды согласования), при этом в других вариантах реализации это может быть первоначальное распределение «наугад». При последующих итерациях вводные данные получаются из предыдущей итерации. Далее, на этапе 1565 осуществляется подготовка параметров и массивов, которые не меняются в процессе решения прямых задач: количество волн, расчетные сетки, а также функция Грина для равномерного пространства. После этого проводится итерационная процедура сопряженных градиентов на этапах 1570 и 1580. Во-первых, исходный член уравнения (4) рассчитывается на этапе 1570. Затем, каждый этап способа сопряженных градиентов требует быстрых преобразований Фурье исходных функций, как показано на этапе 1575. Для того, чтобы прекратить итерации, конвергентность процесса проверяется на этапе 1580. Как только итерационная процедура завершена, неотражающие или отражающие граничные условия должны быть применены на этапе 1585. И наконец, результат вычисления в ходе процесса 1535 создается на этапе 1590. Результат включает в себя массивы, содержащие электрические поля внутри вычислительной области, и сигналы на приемниках для всех позиций передатчиков.
Решатель обратных задач
По меньшей мере в некоторых вариантах реализации для решения обратной задачи в электромагнитной томографии может использоваться способ градиента. В случае трехмерного вектора в цилиндрической геометрии этот способ нуждается в значительных модификациях по сравнению с двухмерными и скалярными вычислениями. В целом, обратная задача в электромагнитной томографии может быть сформулирована как задача минимизации, показанная в уравнении (10) в Патенте США № 7,239,731, где S ij theor - это теоретические значения сигнала, S ij exper - это экспериментальные значения сигнала, и последний компонент - это функционал регуляризации Тихонова.
Важным моментом любой процедуры минимизации является способ расчета самого градиента. Было доказано, что градиент функционала в нашем случае рассчитывается уравнением (11) в Патенте США № 7,239,731, где E j и G ij - это решения уравнений (12) и (13) в Патенте США № 7,239,731. Функции F j и P ij описывают диаграммы поля для EMWindows 150, которые используются как точки или «окошки» входа 148 и точки или «окошки» выхода 148, соответственно.
Прямое вычисление с использованием уравнения (11) занимает очень много времени даже для двухмерного случая и не может эффективно применяться в трехмерном случае. Причина этого заключается в том, что на каждом этапе требуется решение N × M прямых задач, где N - это количество передатчиков, а M - количество приемников. По меньшей мере в некоторых вариантах реализации функция, показанная в уравнении (14) в Патенте США № 7,239,731, может быть решением уравнения (15) в Патенте США № 7,239,731. В результате на каждом этапе итерации необходимо решить только две прямые задачи.
Расчет суммы в правой части уравнения (15) остается сложной задачей, поскольку он требует суммирования по всем приемникам по всем ячейками сетки вычислений. Для преодоления этого препятствия может быть применена двухэтапная процедура. Во-первых, уравнение (16) в Патенте США № 7,239,731 может быть рассчитано по поверхности области вычисления. Это требует значительно меньших вычислительных затрат по сравнению с вычислениями в правой части уравнения (15). Во-вторых, уравнение (17) в Патенте США № 7,239,731 может быть решено с указанными граничными условиями. Уравнение (17) представляет собой уравнение с постоянными коэффициентами и может быть легко решено с использованием синусоидального быстрого преобразования Фурье.
И, наконец, один шаг способа градиента требует решения двух прямых задач (уравнения (12) и (15)) плюс одно уравнение (уравнение (17)) с постоянными коэффициентами.
Один шаг итерационной процедуры может быть выполнен, как показано в уравнении (18) в Патенте США № 7,239,731, где итерационный шаг выбирается способом проб. Ограничения на верхнюю и нижнюю границы значений диэлектрических свойств и значения диэлектрических свойств по границе объекта применяются на этом этапе.
На ФИГ. 12B представлена блок-схема примера способа решения обратной задачи 1500 при опциональном использовании в процессе создания изображения. На этапе 1505 получаются вводные данные. Вводные данные для решателя обратных задач 1500 включают в себя физические и геометрические параметры вычислительного процесса: размеры области вычислений, рабочая частота, максимальное число итераций и сигналов с точек или «окошек» для ЭМ излучения 148. Далее, на этапе 1510, осуществляется подготовка параметров и массивов, которые не меняются в процессе итерации при решении обратных задач: количество волн, расчетные сетки, а также функция Грина для равномерного пространства. После этого проводится сама итерационная процедура вычисления градиента остаточной функции (уравнение (11)) на этапах 1515, 1520, включая сам процесс расчета градиента на этапе 1515. Для того, чтобы прекратить итерации, конвергентность процесса проверяется на этапе 1520. Это включает в себя сравнение значения остаточной погрешности с расчетной экспериментальной погрешностью. Как только итерационная процедура завершена, граничные условия должны быть применены на этапе 1525. И наконец, результат вычисления в ходе процесса 1500 создается на этапе 1530. Результат включает в себя распределение диэлектрических свойств в форме двухмерного и трехмерного массива.
На ФИГ. 12С представлена блок-схема примера способа расчета градиента 1515 при опциональном использовании в процессе создания изображения. Прямая волна рассчитывается на этапе 1535 по уравнению (12), после чего на этапе 1540 осуществляется расчет по уравнению (16) источника волны обратного распространения по границам вычислительной области. Затем на этапе 1545 источник волны обратного распространения рассчитывается в объеме области вычислений уравнением (17), и волна обратного распространения рассчитывается путем решения уравнения (13) на этапе 1550. И наконец, градиент рассчитывается уравнением (11) на этапе 1555.
Алгоритм создания изображения, который является предметом данного изобретения, имеет ряд преимуществ. Например, за счет использования неотражающих граничных условий плюс синусоидальное быстрое преобразование Фурье решатель прямых задач по данному изобретению является самым эффективным. Кроме того, предлагаемый способ расчета так называемой обратной волны (уравнения (15), (16), (17)) позволяет работать в реальной трехмерной многоточечной среде. Кроме того, способ расчета сигнала (уравнение (7)) отличается от любых других и позволяет симулировать работу каждого EMWindow с высокой степенью точности, и сам математический алгоритм по сути является параллельным, что имеет особенные преимущества для параллельных вычислений.
Пример применения: диагностика инсульта
По меньшей мере некоторые варианты реализации систем ЭМТ, представленные в настоящей заявке, включая, помимо прочего, портативные варианты, представленные на ФИГ. 12A, 12B и 13, могут успешно использоваться не в условиях лечебных учреждений. ФИГ. 13 представляет наглядная иллюстрация затрат времени при использовании системы ЭМТ, включая «шапку» 112 из ФИГ. 7, при сканировании головы человека при наличии у пациента симптомов инсульта. Как показано на указанном рисунке, в 8:00 вечера, когда пациент находится дома, у него возникают симптомы инсульта, такие как потеря ориентации и ослабление тонуса мышц лица/рук. Реагируя на такие симптомы, он или член его семьи или друг обращается в медицинское учреждение и вызывает «скорую помощь». Одновременно они связываются с врачом или другим медиком, которые ставятся в известность о возникшей ситуации. Носимый корпус сканера 112, а именно в форме «шапки», изображенной на ФИГ. 7, помещается на голову пациента, и начинается сканирование, как показано, около 8:25 вечера. Полученные данные могут быть предоставлены врачу, врачам «скорой помощи», специалистам по созданию изображений или другому персоналу. Некоторые данные могут использоваться непосредственно для диагностики, лечения или аналогичных действий, а сложные связанные с изображениями данные могут обрабатываться с использованием систем и способов данного изобретения для создания изображений, на основе которых может проводиться дальнейшая диагностика, лечение или аналогичные мероприятия. По меньшей мере в некоторых вариантах реализации, при такой обработке может генерироваться автоматическое уведомление о том, что данные указывают на вероятность инсульта. Следует отметить, что по меньшей мере в некоторых вариантах реализации, такая обработка выполняется сторонним провайдером услуг, который специализируется на создании изображений с использованием систем и способов данного изобретения. Во время транспортировки, примерно с 8:45 до 9:00 вечера, «шапка» 112 продолжает передавать данные о состоянии пациента, и персонал местной больницы получает дополнительные данные и организует и готовится к лечению пациента. Как только пациент прибывает в больницу или медицинский центр, изображения и данные могут использоваться в качестве источника оперативной и точной информации о статусе повреждений, вызванных инсультом, а также позволяют назначить необходимое лечение и помощь. Такая система может быть использована для предоставления желаемого лечения «в пределах 3 часов», что может серьезно повлиять на окончательный исход инсульта и его последствия для пациента.
Замена или другие виды использования в известных системах ЭМТ
Предполагается, что различные элементы данного изобретения могут также использоваться в различных системах, которые до этого использовали традиционную технологию ЭМТ. Например, на ФИГ. 14 приведено схематичное изображение, иллюстрирующее использование системы 110 и способов из ФИГ. 5-12C в работе системы создания четырехмерных дифференциальных (динамических) ЭМТ изображений 200. По меньшей мере частично, работа такой системы 200 может осуществляться с использованием компонентов, а также процесса или процессов, ранее описанных в Публикации Патентной заявки в США № 2012/0010493 A1. В настоящей заявке ε* означает сложное число, если не указано иначе. Система включает в себя «блок для работы с ноу-хау» 202, «модуль оценки задачи «затухание и границы» 204, «модуль настройки и тестирования системы ЭМТ» 206, «модуль воссоздания изображений» 208, «модуль воссоздания дифференциальных изображений» 210, «модуль коррекции движений» 212 и «модуль формирования совмещенных изображений» 214.
Как показано в нижнем правом углу, два важных вводных фактора способа и системы - это тип исследования построения изображений и продолжительность исследования (T_study). Тип исследования, при котором осуществляется построение изображений, может быть, например: i) динамическим исследованием нормальной физиологической активности в мягких тканях конечности или ткани миокарда или мозговой ткани, ii) исследованием контролируемого стресса для оценки функциональной жизнеспособности тканей (например, миокарда или мышечной ткани) в ходе физического стресса (тренировки) или стресса, вызванного фармакологически (например, с использованием добутамина в ходе уже одобренной клинической процедуры), iii) введением электромагнитного контрастного вещества (веществ) (например, синтезированного из составных функциональных наночастиц), или аналогичного вещества, или же представлять собой сочетание указанных выше типов. Продолжительность исследования (T_study) может быть вводным фактором, например, в секундах или в количестве циклов физиологической активности (например, сердечных циклов).
Исходя из вводного фактора система рассчитывает, как представлено блоком для работы с ноу-хау 202, различные желаемые параметры системы. В число таких параметров, предпочтительно, входят необходимое временное разрешение (временные интервалы между каждым циклом (кадром) получения данных ЭМТ), количество кадров, которые должны быть получены системой, необходимая точность измерений по амплитуде, необходимая точность измерений по фазе, а также необходимая точность измерений по поляризации (если необходимо).
Используя эту информацию, «модуль оценки задач «затухание и границы» 204 может рассчитать i) оптимальные диэлектрические свойства (ε* 0 =ε' 0 +j ε" 0 ) среды согласования (заливается вокруг объекта 19 в корпус сканера 112), в основном путем оптимизации компонента затухания сигнала (ε" 0), и ii) ширину полосы пропускания по промежуточной частоте системы на основе требуемого временного разрешения и количества каналов системы, которые необходимо получить. Затем готовится среда согласования/разделения путем смешивания воды, спирта, соли, глицерина и/или других компонентов в необходимой концентрации, соответствующей желаемым диэлектрическим свойствам (ε* 0 =ε' 0 +j ε" 0). Корпус сканера 112 затем может быть полностью или частично заполнен (для выполнения «пустых» измерений или для выполнения фактических измерений в режиме «использования», соответственно) такой средой, которая, по меньшей мере в некоторых вариантах реализации, имеет гелеобразную форму. В частности, как показывает «модуль настройки и тестирования системы ЭМТ» 206, система 200, в том числе система EMT 110, настраивается и приводится в исходное положение, и когда корпус сканера 112, полностью заполнен средой согласования, тестируется «пустой» корпус сканера, т.е. корпус сканера 112, заполненный средой согласования/разделения, но без объекта 19 внутри. Это позволяет убедиться в том, что система имеет желаемые параметры. Затем, когда система 200 готова, исследуемый объект 19 помещается внутрь корпуса сканера 112 вместе со средой согласования/разделения. По меньшей мере в некоторых вариантах реализации среда согласования распределяется по внутренним поверхностям сканера 112 до помещения объекта 19 в сканер 112.
При наличии объекта и среды согласования/разделения, происходит получение полного комплекта данных ЭМТ (кадров), как описано выше, в каждый момент времени T0, T1… T_study. Первичные данные ЭМТ на каждый момент времени подаются в модуль воссоздания изображений 208 для расчета абсолютного анатомического изображения в каждый интервал времени T0, T1… T_study. Абсолютное анатомическое изображение, которое определяется на момент T0 и далее иногда именуется "Исходное изображение", используется для расчета дифференциального изображения и совмещенных изображений во все дальнейшие моменты времени T1…T_study. Для кадра T0 начальным моментом (изначальное распределение диэлектрических свойств в области сканирования) для процедуры итерационного создания изображения может быть равномерное распределение среды согласования ε* 0 =ε' 0 +j ε" 0 в пределах области сканирования. Для всех других кадров (T1…T_study) начальным моментом может быть равномерное распределение среды согласования ε* 0 =ε' 0 +j ε" 0 в пределах области сканирования (Исходное изображение (ε* frame T0)), или же, в качестве альтернативы, начальным моментом может быть реконструированное изображение из предыдущего кадра. Другими словами, Исходное изображение (ε* frame T0), которое представляет собой реконструированное распределение диэлектрических свойств на момент T0, может быть использовано в качестве начальной точки для создания изображения в другие моменты времени (кадры) T1…T_study, или же, в качестве альтернативы, изображение, реконструированное на момент Tt (ε* frame Tt), может быть использовано в качестве начальной точки для создания изображения в кадрах t+1, t+2 и т.д. Это значительно ускоряет процедуру воссоздания изображения за счет сокращения необходимого количества итераций.
«Модуль воссоздания дифференциальных изображений» 210 рассчитывает дифференциальные изображения между изначальным кадром T0 и текущим кадром Tt следующим образом:
ε* diff =(ε* frame Tt - ε* frame T0 )/ε* frame T0 ×100 [%]
Крайне желательно, чтобы реконструированные изображения на моменты T0 и Tt были неподвижными. Несмотря на очень короткое время получения (предпочтительно, порядка десятка миллисекунд или меньше), может потребоваться корректировка на движение. Это может быть осуществлено в «модуле коррекции движений» 212.
Совмещенное изображение на каждый момент времени Tt может быть получено через «модуль формирования совмещенных изображений» 214. В качестве одного из примеров воплощения фоновое изображение, представляющее собой абсолютное анатомическое изображение биологического объекта 19, создается с использованием серой гаммы, а дифференциальное по времени изображение, созданное с использованием цветной гаммы, накладывается на фоновое изображение. На этом примере костные участки, имеющие низкие диэлектрические свойства, могут быть переданы на абсолютном анатомическом изображении с использованием более темных оттенков серого, а мягкие ткани могут быть переданы с использованием более светлых оттенков серого. Также в этом примере степень изменений может быть передана на дифференциальном по времени изображении, которое отражает физиологическую активность или вмешательства в ходе исследования, исходя из цветового спектра, где каждый конкретный цвет представляет процентиль изменений. Простые примеры таких совмещенных изображений, полученных в ходе предварительных экспериментов с использованием указанных выше систем и способов, описанных выше, приведены в указанной выше Публикации Патентной заявки в США № 2012/0010493 A1.
Исходя из изложенной выше информации, лицам, которые являются профессионалами в данной области, будет без труда понятно, что данное изобретение может широко применяться. Многочисленные практические воплощения и адаптации данного изобретения, помимо тех, которые описаны в настоящей заявке, а также многочисленные вариации, модификации и эквивалентные действия, будут очевидны или разумно понятны на основе данного изобретения и приведенных выше его описаний, без отклонения от существа и объема данного изобретения.
Соответственно, несмотря на то, что данное изобретение было детально описано в настоящей заявке применительно к одному или нескольким приоритетным вариантам реализации, следует понимать, что предоставленная информация носит исключительно иллюстративный характер, призвана дать представление о данном изобретении и приведена исключительно с целью предоставления полной и полезной с практической точки зрения информации об изобретении. Приведенная выше информация не должна толковаться как ограничивающая данное изобретение или иным образом исключающая любые другие воплощения, адаптации, вариации, модификации или эквивалентные действия; данное изобретение ограничивается только патентными формулами, описанными в приложении к настоящей заявке, и их эквивалентами.
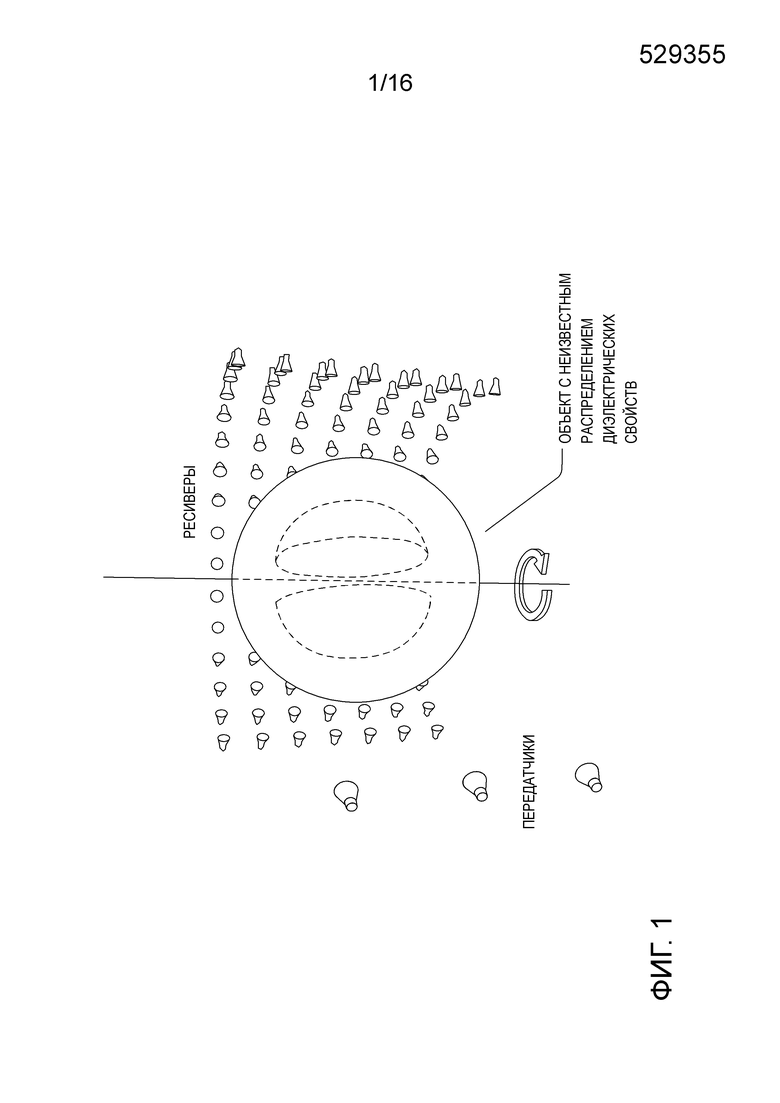
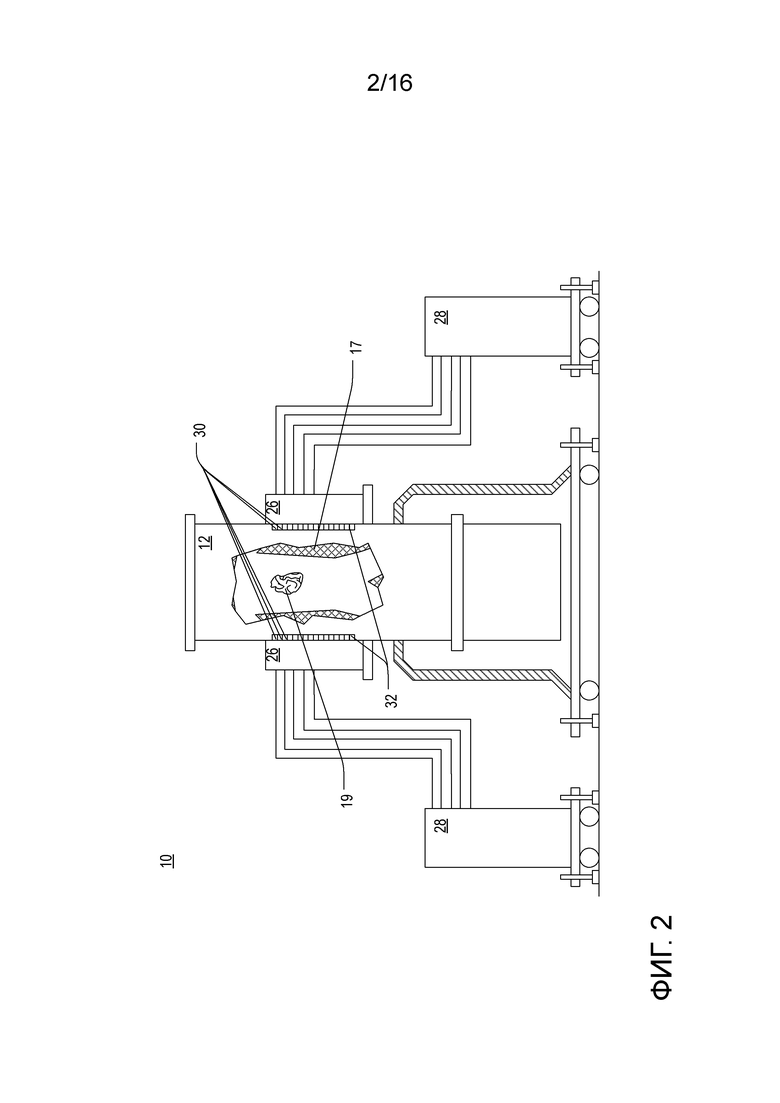
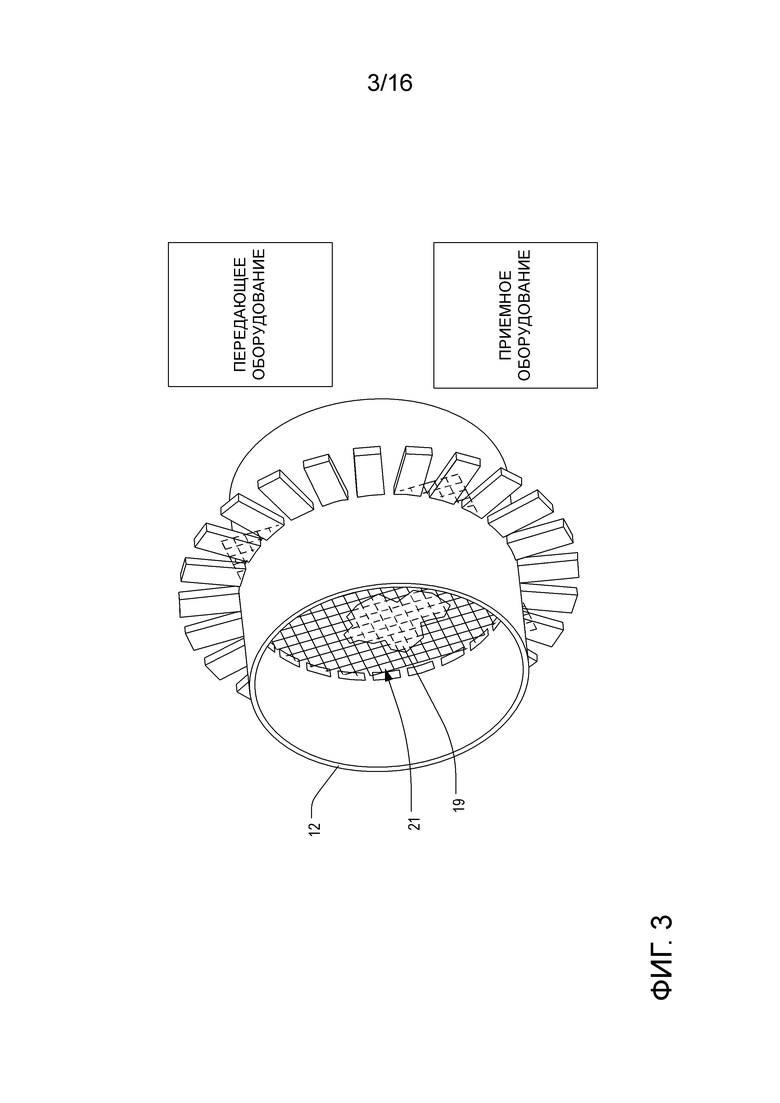
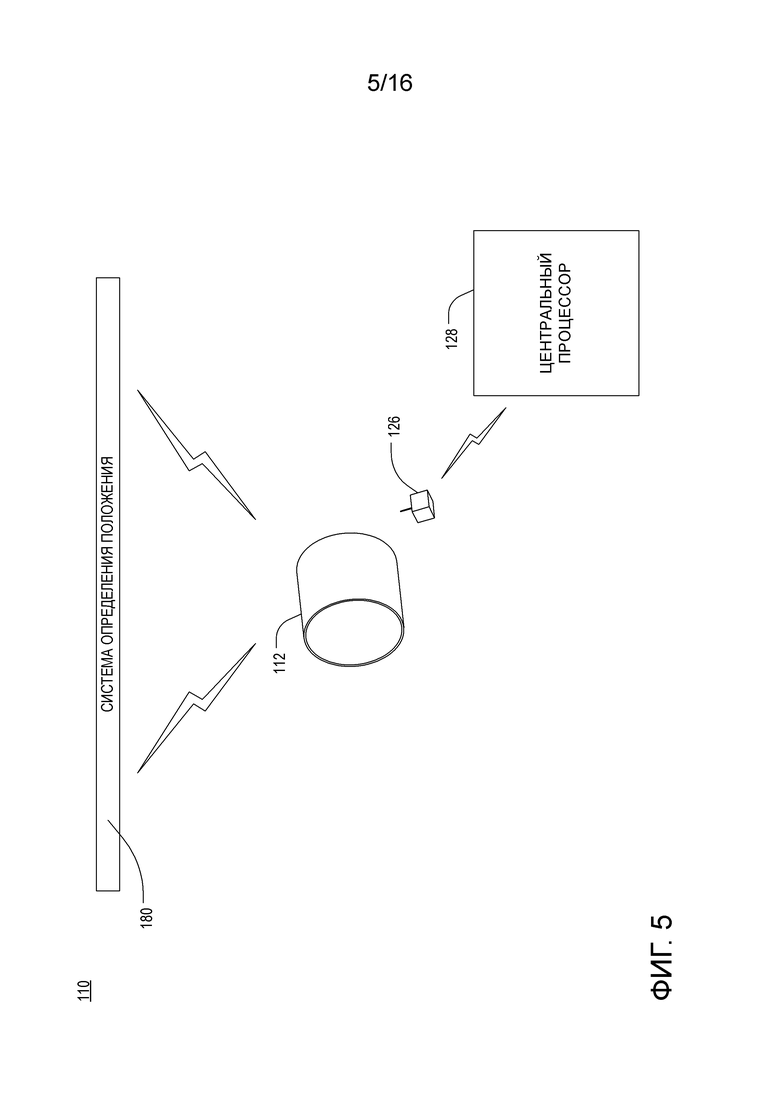
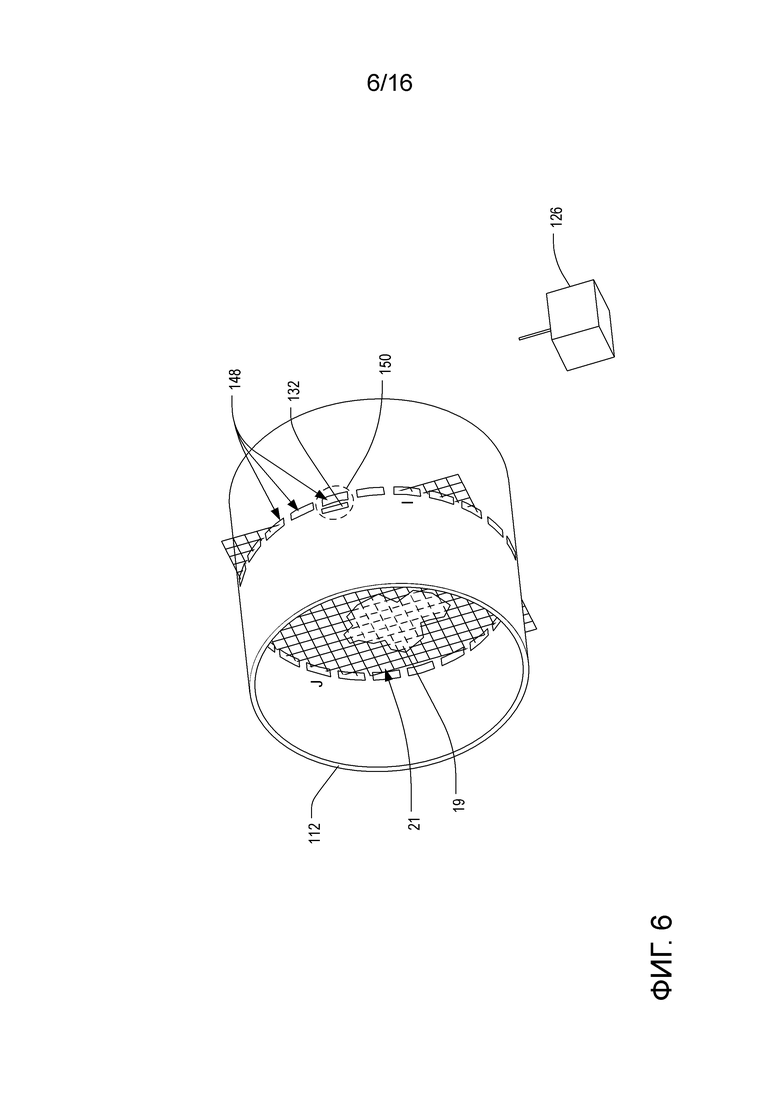
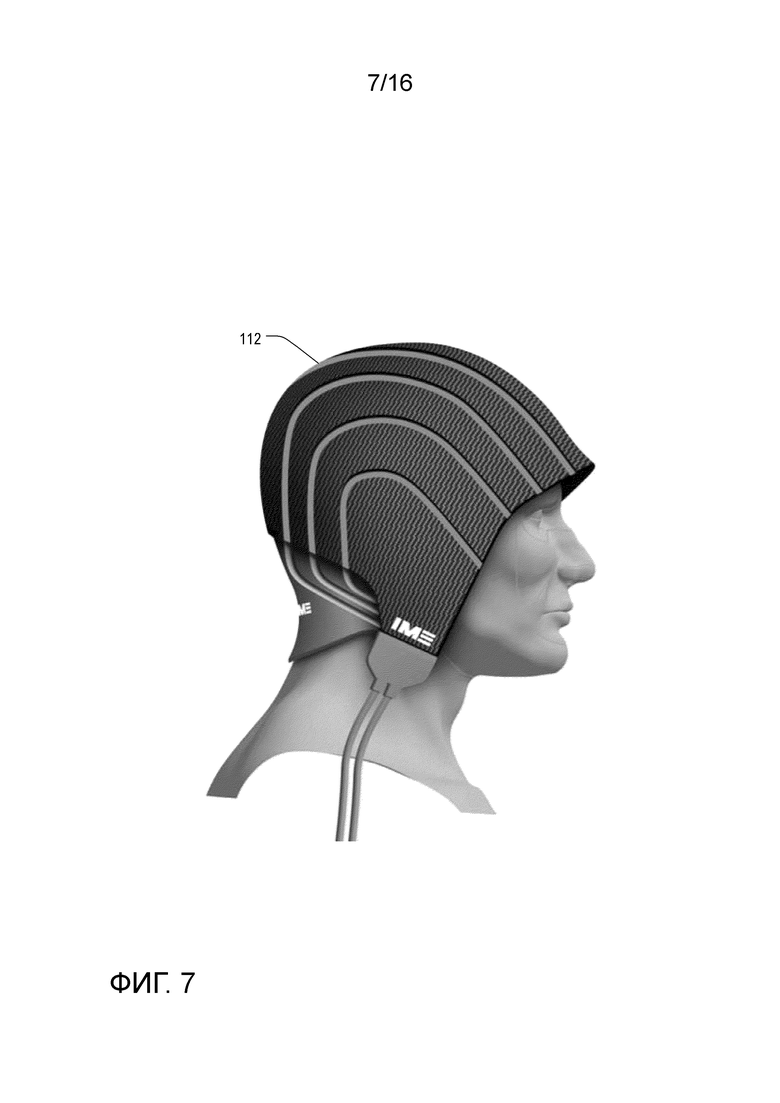
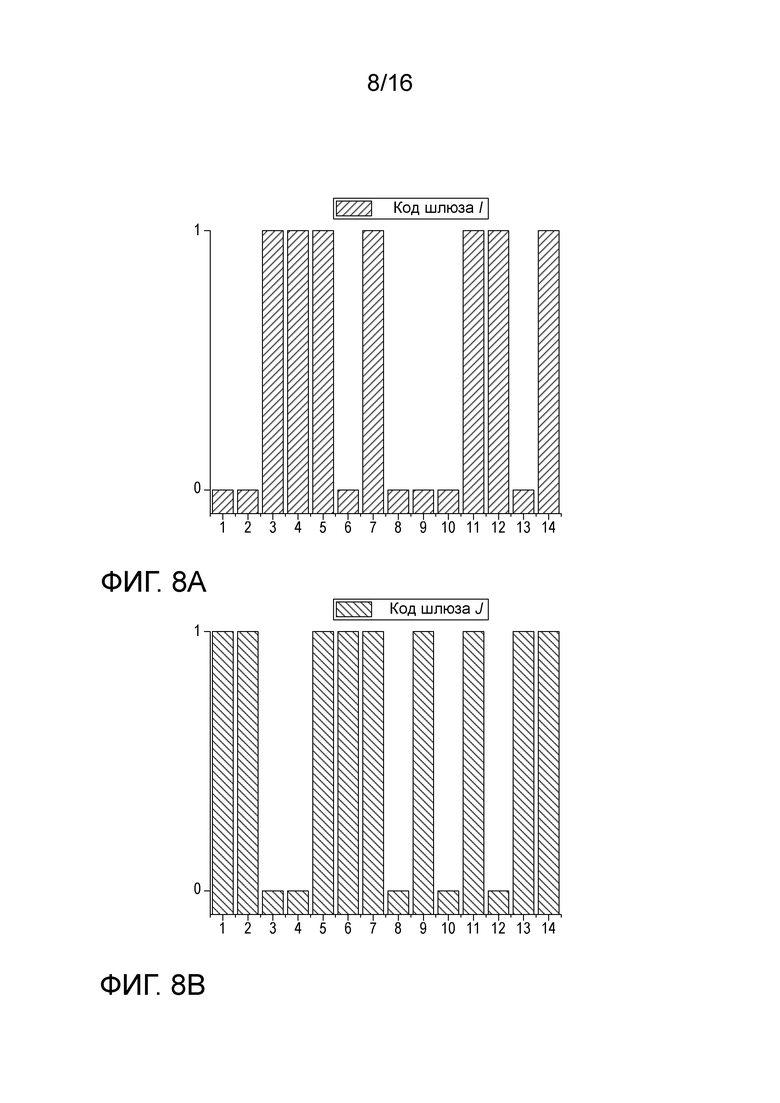
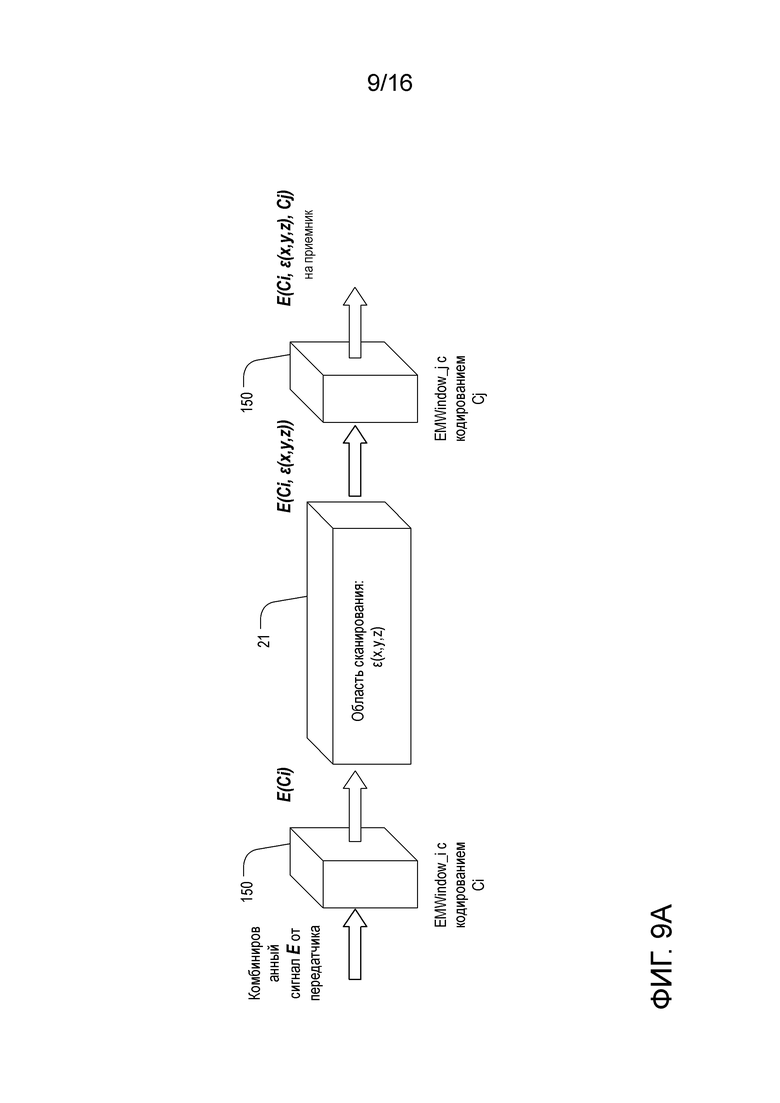
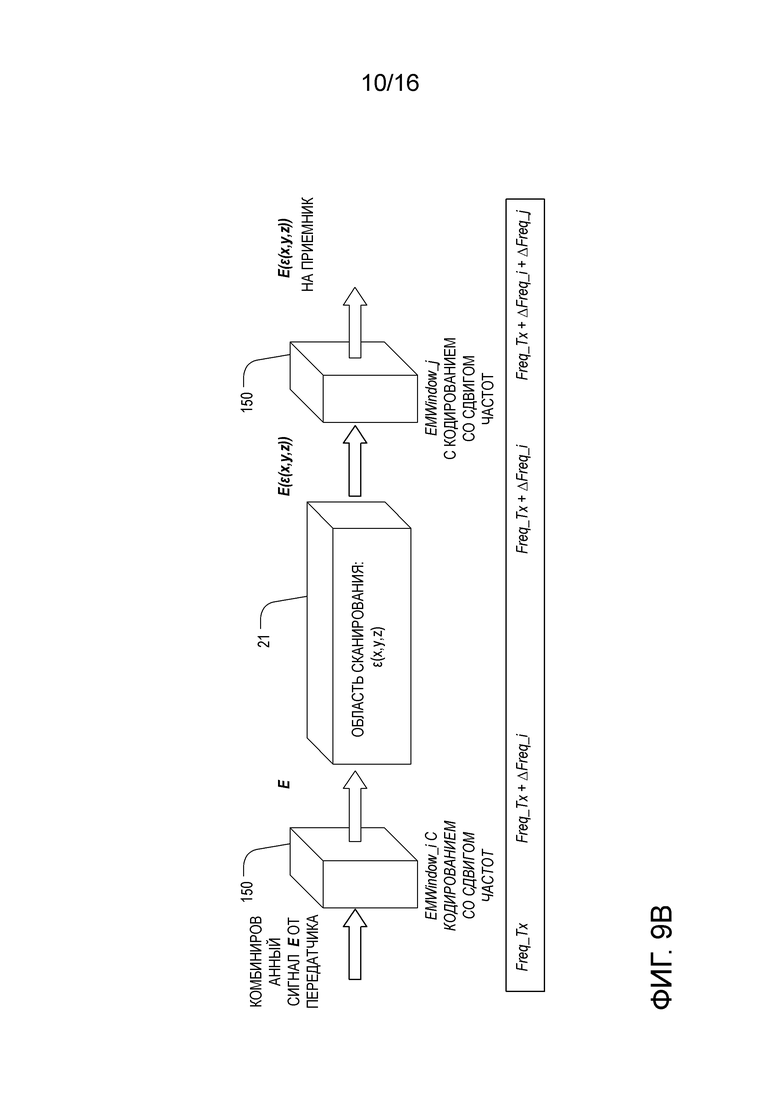
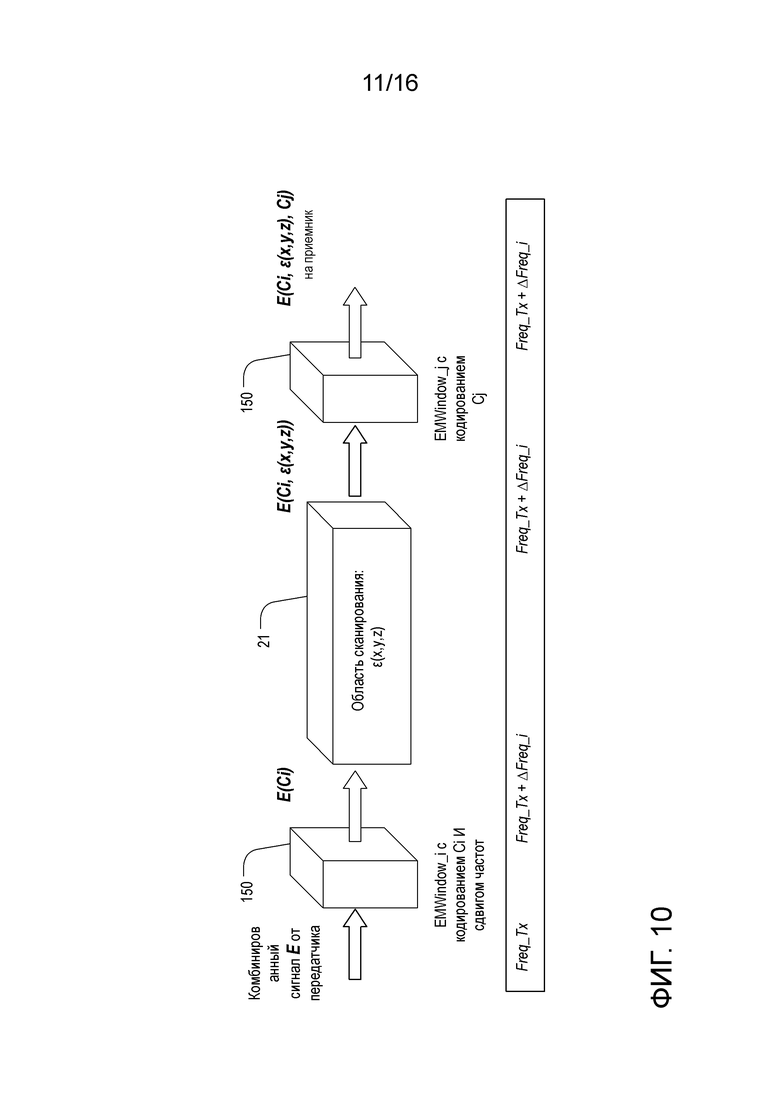

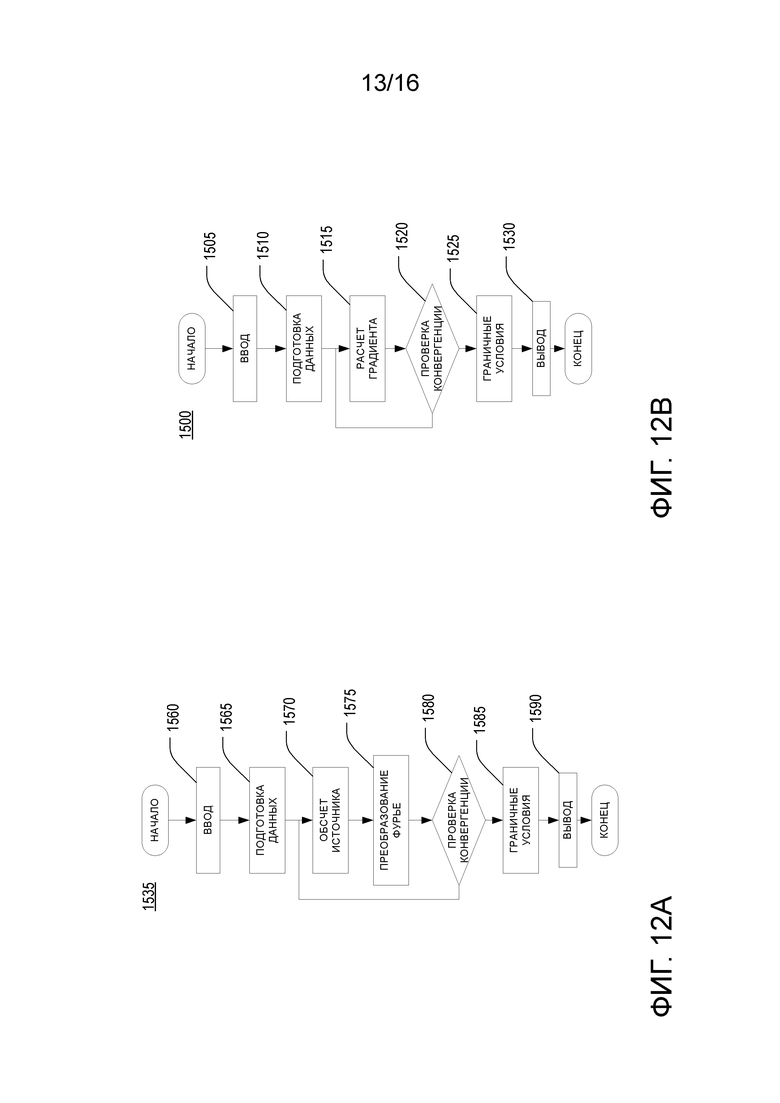
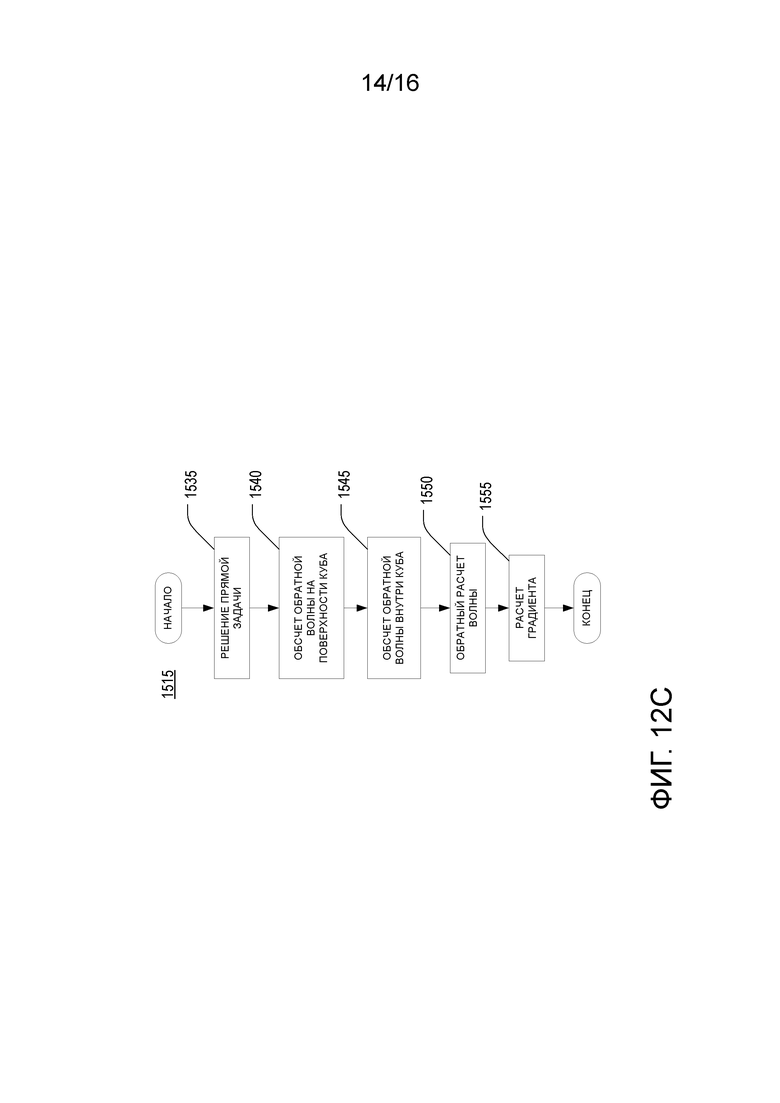
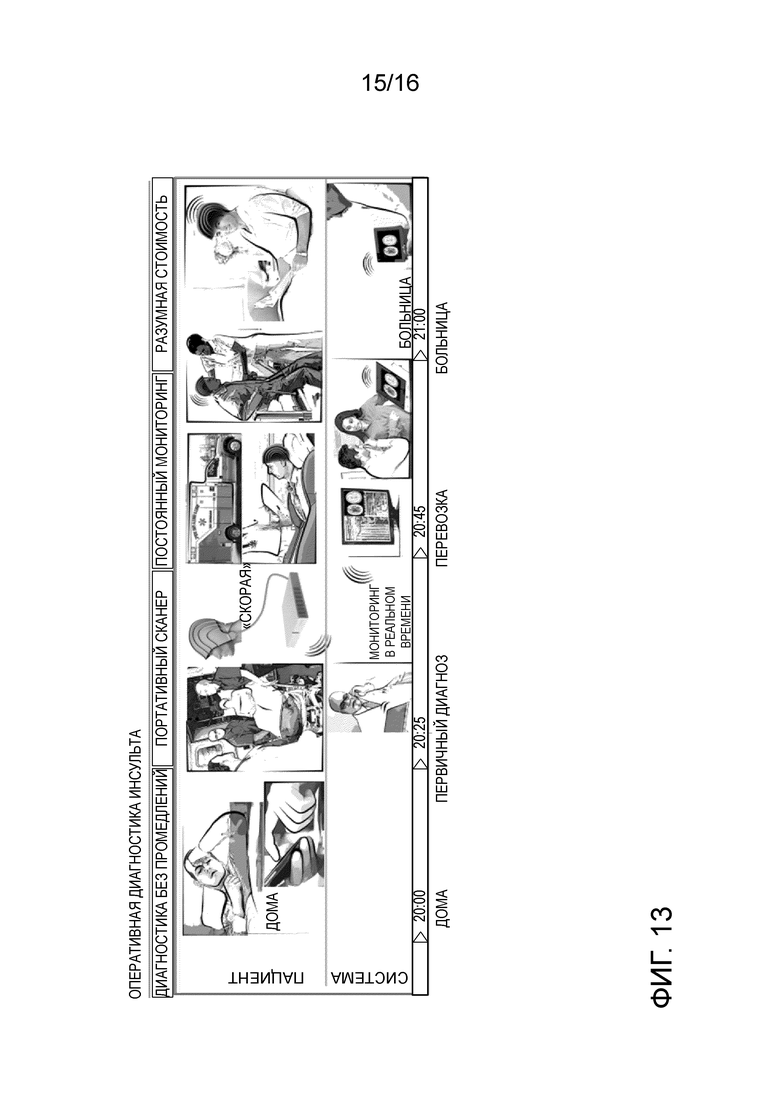
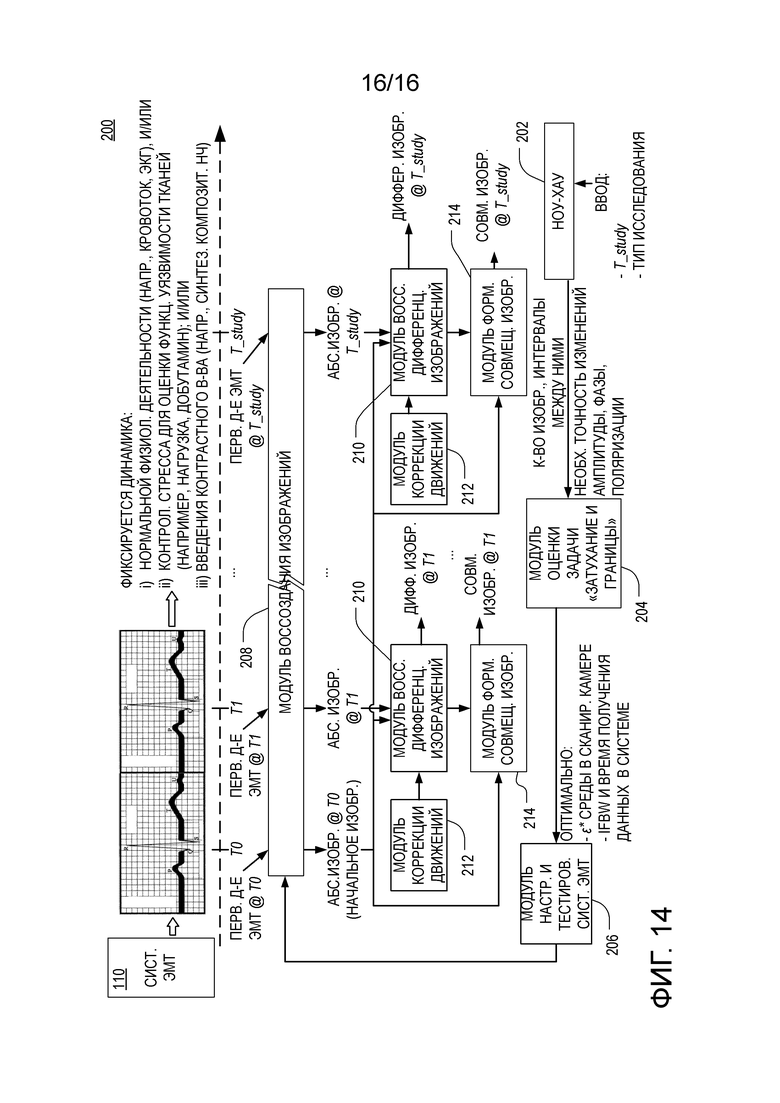
Группа изобретений относится к медицинской технике, а именно к средствам электромагнитной томографии. Способ электромагнитной томографии частей тела живого человека с использованием носимого сканера в корпусе содержит установку носимого и переносного сканера таким образом, чтобы сканер облегал часть тела живого человека во время перемещения человека из одного места в другое, причем носимый и переносной сканер имеет полую конструкцию, стенки которой содержат множество «окошек» для электромагнитного излучения, определение информации о положении носимого корпуса сканера по отношению к внешней системе координат, создание электромагнитного поля, внешнего по отношению к носимому сканеру, которое проходит в носимый корпус сканера и выходит из него через окошки для электромагнитного излучения, независимо открывание или закрывание окошек для электромагнитного излучения для контроля, проходит ли через них электромагнитное излучение, при этом этап независимого открытия или закрытия «окошек» для электромагнитного излучения осуществляется с помощью соответствующего микрошлюза, которым оборудовано каждое «окошко», измерение электромагнитного поля после того, как оно было рассеяно/изменилось в результате влияния части тела живого человека, и создание электромагнитного томографического изображения на основании созданного и измеренного электромагнитного поля с использованием информации об установленном положении и включении информации о положении каждого из множества окошек для электромагнитного излучения. Второй вариант способа электромагнитной томографии содержит установку на живом челевеке носимого сканера, стенки которого содержат множество «окошек» для электромагнитного излучения, определение информации о положении носимого корпуса сканера по отношению к внешней раме, независимо открывание или закрывание окошек для электромагнитного излучения с помощью соответствующего микрошлюза, которым оборудовано каждое «окошко», для контроля, проходит ли через них электромагнитное излучение, создание электромагнитного поля, внешнего по отношению к носимому сканеру, которое проходит в носимый корпус сканера и выходит из него через одно или более окошек для электромагнитного излучения, измерение электромагнитного поля после того, как оно было рассеяно/изменилось в результате влияния части тела живого человека, и создание электромагнитного томографического изображения на основании созданного и измеренного электромагнитного поля с использованием информации об установленном положении и включении информации о положении каждого из множества окошек для электромагнитного излучения. Использование изобретений позволяет расширить ассортимент средств для электромагнитной томографии. 2 н. и 28 з.п. ф-лы, 14 ил.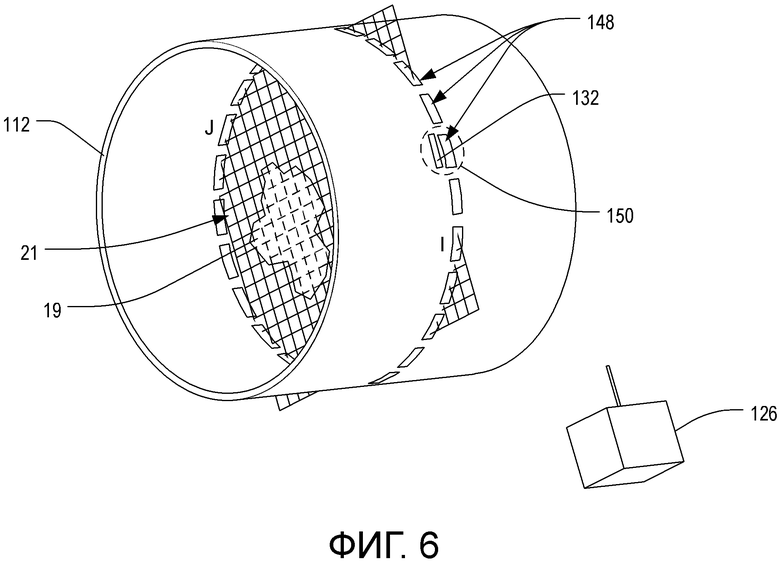
1. Способ электромагнитной томографии частей тела живого человека с использованием носимого сканера в корпусе, содержащий:
установку носимого и переносного сканера таким образом, чтобы сканер облегал часть тела живого человека во время перемещения человека из одного места в другое, причем носимый и переносной сканер имеет полую конструкцию, стенки которой содержат множество «окошек» для электромагнитного излучения;
определение информации о положении носимого корпуса сканера по отношению к внешней системе координат;
создание электромагнитного поля, внешнего по отношению к носимому сканеру, которое проходит в носимый корпус сканера и выходит из него через окошки для электромагнитного излучения;
независимо открывание или закрывание окошек для электромагнитного излучения для контроля, проходит ли через них электромагнитное излучение, при этом этап независимого открытия или закрытия «окошек» для электромагнитного излучения осуществляется с помощью соответствующего микрошлюза, которым оборудовано каждое «окошко»,
измерение электромагнитного поля после того, как оно было рассеяно/изменилось в результате влияния части тела живого человека; и
создание электромагнитного томографического изображения на основании созданного и измеренного электромагнитного поля с использованием информации об установленном положении и включении информации о положении каждого из множества окошек для электромагнитного излучения.
2. Способ по п. 1, в котором стенки полой конструкции определяют границу области сканирования и по меньшей мере частично выполнены из материала, непроницаемого для генерируемого электромагнитного поля, и при этом множество «окошек» для электромагнитного излучения распределены по стенкам таким образом, чтобы полностью окружить область сканирования.
3. Способ по п. 1, в котором этап независимого открытия или закрытия «окошек» для электромагнитного излучения включает управление микрошлюзами таким образом, что электромагнитное поле в каждый отдельно взятый момент времени попадает в корпус сканера только через одно «окошко».
4. Способ по п. 1, в котором этап независимого открытия или закрытия «окошек» для электромагнитного излучения включает управление микрошлюзами таким образом, что электромагнитное поле попадает в корпус сканера через множество «окошек» одновременно.
5. Способ по п. 1, в котором этап независимого открытия или закрытия «окошек» для электромагнитного излучения включает управление микрошлюзами таким образом, что электромагнитное поле покидает корпус сканера только через одно «окошко» в каждый отдельно взятый момент времени.
6. Способ по п. 1, в котором этап независимого открытия или закрытия «окошек» для электромагнитного излучения включает управление микрошлюзами таким образом, что электромагнитное поле покидает корпус сканера через множество «окошек» одновременно.
7. Способ по п. 1, в котором у каждого микрошлюза есть свой индивидуальный код.
8. Способ по п. 7, который дополнительно содержит этап, когда в момент входа электромагнитного поля в корпус сканера через открытое «окошко» для электромагнитного излучения код микрошлюза открытого «окошка» присваивается электромагнитному полю.
9. Способ по п. 1, в котором шаг определения информации о положении, касающейся положения носимого сканера, осуществляют с использованием системы определения положения, при этом способ дополнительно содержит этап определения с помощью системы определения положения информации о пространственном положении каждого из множества «окошек» для электромагнитного излучения.
10. Способ по п. 1, в котором шаг определения информации о положении, касающейся положения носимого сканера, осуществляют с использованием системы определения положения, при этом способ дополнительно содержит этап определения, независимо от положения системы определения, информации о пространственном положении каждого из множества «окошек» для электромагнитного излучения.
11. Способ по п. 1, который дополнительно содержит этап определения, с помощью системы определения положения, информации о положении корпуса сканера, при этом центральный процессор создает магнитно-томографическое изображение на основании принятого электромагнитного поля и с учетом информации о положении корпуса сканера, полученной от системы определения положения.
12. Способ по п. 1, который дополнительно содержит этап определения, с помощью системы определения положения, информации о положении «окошек» для электромагнитного излучения, при этом центральный процессор создает магнитно-томографическое изображение на основании принятого электромагнитного поля и с учетом информации о положении «окошек», полученной от системы определения положения.
13. Способ по п. 1, в котором этап определения положения носимого корпуса сканера включает определение информации, с помощью первой системы определения положения, о положении корпуса сканера; при этом этап определения положения носимого корпуса сканера дополнительно включает определение информации, с помощью второй системы определения положения, о положении «окошек» для электромагнитного излучения; причем этап создания магнитно-томографического изображения реализуется посредством центрального процессора на основании измеренного электромагнитного поля и с учетом информации о положении корпуса сканера и «окошек», полученной от системы определения положения.
14. Способ по п. 1, в котором корпус сканера имеет форму шапки, при этом этап установки носимого и переносного корпуса сканера включает ношение «шапки» живым человеком на голове.
15. Способ по п. 1, в котором корпус сканера имеет форму рубашки, при этом этап установки носимого и переносного корпуса сканера включает ношение «рубашки» живым человеком на теле.
16. Способ по п. 1, в котором корпус сканера имеет форму жилета, при этом этап установки носимого и переносного корпуса сканера включает ношение «жилета» живым человеком на теле.
17. Способ по п. 1, в котором корпус сканера имеет форму рукава, при этом этап установки носимого и переносного корпуса сканера включает ношение «рукава» живым человеком на руке.
18. Способ по п. 1, в котором корпус сканера имеет форму нижнего белья.
19. Способ по п. 18, в котором нижнее белье представляет собой бюстгальтер, при этом этап установки носимого и переносного корпуса сканера включает ношение бюстгальтера живым человеком на груди.
20. Способ по п. 1, в котором этапы генерирования и приема электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, причем указанное оборудование, передающее и принимающее электромагнитное излучение, является переносным.
21. Способ по п. 1, в котором этапы генерирования и приема электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, причем указанное оборудование, передающее и принимающее электромагнитное излучение, представляет собой компактную сотовую базовую станцию.
22. Способ по п. 1, в котором этапы генерирования и приема электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, причем указанное оборудование, передающее и принимающее электромагнитное излучение, включает переносное передающее оборудование.
23. Способ по п. 1, в котором этапы генерирования и приема электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, причем указанное оборудование, передающее и принимающее электромагнитное излучение, включает переносное приемное оборудование.
24. Способ по п. 1, в котором этапы генерирования и приема электромагнитного поля осуществляются оборудованием, передающим и принимающим электромагнитное излучение, причем указанное оборудование, передающее и принимающее электромагнитное излучение, является отдельным от корпуса сканера элементом.
25. Способ по п. 1, в котором этап создания магнитно-томографических изображений осуществляется центральным процессором.
26. Способ электромагнитной томографии частей тела живого человека с использованием носимого сканера в корпусе, содержащий:
установку на живом челевеке носимого сканера, стенки которого содержат множество «окошек» для электромагнитного излучения;
определение информации о положении носимого корпуса сканера по отношению к внешней раме;
независимо открывание или закрывание окошек для электромагнитного излучения с помощью соответствующего микрошлюза, которым оборудовано каждое «окошко», для контроля, проходит ли через них электромагнитное излучение,
создание электромагнитного поля, внешнего по отношению к носимому сканеру, которое проходит в носимый корпус сканера и выходит из него через одно или более окошек для электромагнитного излучения;
измерение электромагнитного поля после того, как оно было рассеяно/изменилось в результате влияния части тела живого человека; и
создание электромагнитного томографического изображения на основании созданного и измеренного электромагнитного поля с использованием информации об установленном положении и включении информации о положении каждого из множества окошек для электромагнитного излучения.
27. Способ по п. 26, в котором используют предварительно известную информацию о пространственном положении каждого открытого окошка для электромагнитного излучения.
28. Способ по п. 26, который дополнительно содержит шаг определения пространственного положения каждого открытого окошка для электромагнитного излучения.
29. Способ по п. 26, в котором информация о пространственном положении каждого открытого окошка для электромагнитного излучения связана с положением окошка относительно носимого сканера.
30. Способ по п. 26, в котором информация о пространственном положении каждого открытого окошка для электромагнитного излучения связана положением окошка относительно внешней системы координат.
| US 2010067770 A1, 18.03.2010;US 8376948 B2, 19.02.2013;WO 2011156810 A2, 15.12.2011;RU 2449729 С2, 10.05.2012 | |||
| Ziv Yaniv et al | |||
| Electromagnetic tracking in the clinical environment | |||
| Med | |||
| Phys | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |

