ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области магнитного резонанса (МР). Оно находит особое применение в сочетании с методами МР-томографии и МР-устройствами для диагностических целей и будет описано с конкретной ссылкой на них.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
МР-способы формирования изображений, которые используют взаимодействие между магнитными полями и ядерными спинами для того, чтобы формировать двухмерные или трехмерные изображения, широко используются в настоящее время, в частности в области медицинской диагностики, так как при визуализации мягких тканей они во многих отношениях превосходят другие способы визуализации, не требуют ионизирующего излучения и, как правило, не инвазивны.
В соответствии с МР-способом в целом, тело пациента, подлежащего исследованию, располагают в сильном однородном магнитном поле (поле B0), направление которого в то же время определяет ось (обычно ось z) координатной системы, на которой основано измерение. Магнитное поле создает различные энергетические уровни для отдельных ядерных спинов в зависимости от напряженности магнитного поля, которые могут быть возбуждены (спиновый резонанс) посредством прикладывания электромагнитного переменного поля (РЧ-поля, также называемого полем B1) определенной частоты (так называемой ларморовой частоты или МР-частоты). С макроскопической точки зрения распределение отдельных ядерных спинов производит общую намагниченность, которая может быть отклонена от состояния равновесия посредством прикладывания электромагнитного импульса соответствующей частоты (РЧ-импульса), в то время как магнитное поле проходит перпендикулярно оси z, так что намагниченность выполняет прецессионное движение вокруг оси z. Прецессионное движение описывает поверхность конуса, угол апертуры которого называют углом отклонения. Величина угла отклонения зависит от силы и продолжительности прикладываемого электромагнитного импульса. В случае так называемого 90° импульса спины отклоняются от оси z в поперечную плоскость (угол отклонения 90°).
После окончания РЧ-импульса намагниченность возвращается к первоначальному состоянию равновесия, в котором снова создана намагниченность в направлении z, с первой постоянной времени T1 (время спин-решеточной или продольной релаксации), и намагниченность в направлении, перпендикулярном направлению z, релаксирует со второй постоянной времени T2 (время спин-спиновой или поперечной релаксации). Изменение намагниченности можно детектировать посредством одной или нескольких принимающих РЧ-катушек, которые расположены и ориентированы в объеме исследования МР-устройства таким образом, что изменение намагниченности измеряется в направлении, перпендикулярном оси z. Спад поперечной намагниченности сопровождается, после прикладывания, например, 90° импульса, переходом ядерных спинов (индуцированным локальными неоднородностями магнитного поля) из упорядоченного состояния с одной и той же фазой в состояние, в котором все фазовые углы распределены равномерно (расфазировка). Расфазировку можно компенсировать посредством рефокусирующего импульса (например, 180° импульса). Это создает эхо-сигнал (спиновое эхо) в принимающих катушках.
Для того чтобы получить пространственное разрешение в теле, переключаемые линейны градиенты магнитного поля, проходящие вдоль трех главных осей, накладывают на однородное магнитное поле, что приводит к линейной пространственной зависимости частоты спинового резонанса. При этом сигнал, получаемый в принимающих катушках, содержит компоненты различных частот, которые могут быть связаны с различными местоположениями в теле. Данные МР-сигналов, получаемые посредством РЧ-катушек, соответствуют области пространственных частот и называются данными k-пространства. Данные k-пространства, как правило, включают в себя множество линий, получаемых при различном фазовом кодировании. Каждая строка оцифровывается посредством получения ряда выборок. Набор данных k-пространства преобразуется в МР-изображение посредством преобразования Фурье.
В различных применениях МРТ движение исследуемого объекта (пациента) может отрицательно влиять на качество изображений. Получение достаточных МР-сигналов для реконструкции изображения занимает конечный период времени. Движение объекта, подлежащего визуализации, во время данного конечного времени сбора данных, как правило, приводит к артефактам движения на реконструированном МР-изображении. В обычных подходах к МР-томографии, когда указано заданное разрешение МР-изображения, время сбора данных может быть уменьшено только в очень малой степени. В случае медицинской МР-томографии артефакты движения могут возникать, например, из-за сердечного и дыхательного циклического движения и других физиологических процессов, а также из-за движения пациента, что приводит к артефактам размытости, рассогласования, деформации и призрачных изображений.
Были разработаны методы коррекции ожидаемого движения, такие как так называемый метод навигаторов, для преодоления проблем в отношении движения посредством проспективной настройки параметров визуализации, которые определяют положение и ориентацию исследуемого объема в объеме визуализации. Посредством этого в методе навигаторов изображений получают ряд сигналов навигатора с низким разрешением от пространственно ограниченного объема, например луча навигатора, который пересекает диафрагму обследуемого пациента. Для регистрации сигналов навигатора можно применять так называемые 2D РЧ-импульсы или 90-градусные и 180-градусные пересекающие блок сигналы спинового эха. Они возбуждают пространственно ограниченный объем навигатора в форме подобного карандашу луча, который считывается с использованием градиентного эха. Другими способами детектирования вызываемого движением мгновенного положения исследуемого объема являются получение двумерных сагиттальных срезов, которые расположены в верхней части диафрагмы, или получение трехмерных массивов данных с низким разрешением. Соответствующий объем навигатора интерактивно помещают таким образом, что значение смещения, указывающее на мгновенное положение анатомического объекта, подлежащего визуализации, может быть извлечено из получаемых сигналов навигатора и использовано для коррекции движения исследуемого объема в реальном времени. Например, метод навигаторов используют для минимизации последствий дыхательного движения в исследованиях тела и сердца, в которых движение дыхания может серьезно ухудшать качество изображений. Для уменьшения данных артефактов предлагается временная селекция наряду с проспективной, а также ретроспективной компенсацией движения, основанной на сигналах навигатора. Кроме того, сигналы навигатора можно использовать для проспективного выравнивания нескольких изображений в исследовании. После получения сигналов навигатора последующие сигналы визуализации получают с компенсацией детектированного движения, переориентируя стек срезов изображения и собирая данные в интервалы времени, свободные от движения. В итоге из получаемых сигналов визуализации реконструируют МР-изображение.
В качестве примера, сигнал навигатора, используемый в современных применениях для коронарной или почечной МР-ангиографии, представляет собой, как правило вышеупомянутый сигнал от объема в форме подобного карандашу луча, ориентированного сквозь диафрагму. Поскольку респираторные движения диафрагмы и сердца, и почек коррелируют, метод диафрагмальных навигаторов можно применять для подавления артефактов респираторного движения при коронарной и почечной МР-ангиографии при свободном дыхании. Однако чувствительность и специфичность метода диафрагмальных навигаторов при детектировании стеноза коронарных и почечных артерий оказались разочаровывающими. Одним из основных факторов является сам диафрагмальный навигатор, который непосредственно не контролирует движение коронарных и почечных артерий. Это в свою очередь ограничивает эффективность подавления артефактов движения.
В последнее время методы навигаторов также используются для проспективного детектирования и коррекции движения головы, предстательной железы и суставов. В них получают корональные, сагиттальные и поперечные срезы локализации или 3D-блок локализации низкого разрешения для детектирования поступательного и вращательного движения. Поскольку вышеописанный метод навигаторов изображения увеличивает время сбора данных, детектирование движения и респираторных состояний (таких как задержка дыхания) может быть альтернативно достигнуто посредством внешних датчиков движения (таких как оптические и респираторные датчики) или навигаторов k-пространства (FNAV, ONAV, навигатор типа клеверный лист). В случае если обнаружено движение или достигнуто респираторное состояние, применяется навигатор изображения для проспективной адаптации стека изображений. Таким образом, в целом, навигатор можно применять в случае обнаружения движения (например, движения головы), достижения состояния движения (например, окончание задержки дыхания на выдохе) или, в общем случае, чередуя навигаторы со сбором данных (например, свободное дыхательное движение).
Документ 'Turboprop IDEAL: a motion resistant fat-water separation technique' в MRM 61(2009)188-195, D. Huo et al., раскрывает устойчивый к движению метод разделения воды и жира (TP-IDEAL). Данный известный метод направлен на избегание артефактов движения при разделении воды и жира. Это достигается путем усреднения сдвига и поворота, для того чтобы избежать рассогласования между k-пространственными лопастями при сборе данных Propeller.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Для улучшения управляемой навигаторами МР-ангиографии и других методов МР-томографии, в которых требуется визуализировать движущиеся части человеческого тела, необходимо получить прямые и точные измерения соответствующего движения.
Из вышеизложенного легко понять, что существует необходимость в улучшенном способе МР-томографии. Поэтому целью настоящего изобретения является обеспечить возможность МР-томографии с надежным детектированием движения и высоким качеством изображений.
В соответствии с настоящим изобретением раскрыт способ МР-томографии по меньшей мере части тела, помещенной в главное магнитное поле B0 в объеме исследования МР-устройства. Данный способ включает в себя следующие этапы:
- подвергание части тела воздействию визуализирующей последовательности, содержащей один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, для получения сигналов визуализации;
- подвергание части тела воздействию навигационной последовательности, прикладываемой по меньшей мере единожды до, во время или после визуализирующей последовательности, причем навигационная последовательность содержит один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, управляемых таким образом, что сигналы навигатора получают посредством одноточечного или многоточечного метода Диксона;
- извлечение данных о перемещении, и/или вращении, и/или сдвиге из сигналов навигатора, причем эти данные о перемещении, и/или вращении, и/или сдвиге отражают движение, происходящее внутри части тела;
- реконструирование МР-изображения из сигналов визуализации,
причем данные о перемещении и/или вращении используются для адаптирования визуализирующей последовательности и/или для коррекции движения во время реконструкции МР-изображения.
В соответствии с настоящим изобретением навигационная последовательность прикладывается по меньшей мере единожды в визуализирующей последовательности. Движение, происходящее внутри визуализируемой части тела, компенсируется в течение всего сканирования. Навигационная последовательность, как понимается в настоящем изобретении, обычно представляет собой сканирующую последовательность, которую можно использовать для определения и получения данных о перемещении, и/или вращении, и/или сдвиге. Посредством навигационной последовательности обычно получают данные низкого разрешения одно-, двух- или трехмерного объема для измерения вращения анатомического объекта вокруг по меньшей мере одной оси координат и/или перемещения соответствующего анатомического объекта вдоль по меньшей мере одной оси координат. Данные о перемещении, и/или вращении, и/или сдвиге используют в равной степени для адаптирования визуализирующей последовательности. Адаптирование визуализирующей последовательности означает, например, адаптирование положения, и/или ориентации, и/или сдвига среза изображения или любого другого двух- или трехмерного объема визуализации внутри тела пациента во время получения сигналов визуализации. Адаптирование визуализирующей последовательности включает в себя адаптации градиентов для компенсации аффинного движения. Кроме того, можно использовать более общую модель движения для ретроспективной коррекции получаемых сигналов визуализации, для того чтобы уменьшать вызванное движением размытие или искажение на реконструированном МР-изображении. В этой части способ настоящего изобретения совпадает с обычным методом навигаторов.
В соответствии с, по существу, известным методом Диксона спектральное различие между спинами жира и воды используют с целю разделения МР-сигналов, исходящих от ткани, содержащей воду, и МР-сигналов, исходящих от жировой ткани. При визуализации по Диксону, как правило, повторяют два сбора данных с различными временами эхо, причем намагниченность жира при втором сборе данных не в фазе относительно первого сбора данных при соответствующих временах эхо. Разделенные и различные карты воды и жира получают посредством простого сложения или вычитания сложных МР-сигналов. В общем, получают карту поля B0, изображение воды и изображение жира посредством многоточечной последовательности Диксона.
В соответствии с настоящим изобретением одно- или многоточечные последовательности применяют для получения сигналов навигатора. Как упомянуто выше, сигналы навигатора обычно считываются в обычных методах навигатора посредством использования одного градиентного эха. В соответствии с настоящим изобретением, когда используется многоточечная последовательность Диксона, получают по меньшей мере один дополнительный эхо-сигнал (или дополнительный частичный эхо-сигнал) для получения дополнительной информации.
При одноточечном методе Диксона получают один эхо-сигнал при определенном времени эха и из него реконструируют карту воды и жира. Однако в случае одноточечного метода Диксона не получают информацию о B0.
В случае многоточечного метода Диксона из сигналов навигатора можно реконструировать навигатор воды, навигатор жира и навигатор B0. Данные различные навигаторы можно затем использовать для (предпочтительно, автоматической) сегментации, для того чтобы получать прямое и точное измерение соответствующего движения. Например, навигатор жира можно применять для почечных артерий и визуализации почек или стенок желудочков в коронарной МР-ангиографии, для того чтобы непосредственно контролировать связанное с дыханием движение в исследуемой области. Благодаря этому движение крови не усложняет извлечение данных о перемещении и/или вращении из сигналов навигатора. Навигатор жира особенно полезен для непосредственного наблюдения за движением почечной и коронарной артерии или движением почек, поскольку жир обычно окружает почечную и коронарную артерии и почки и движется вместе с ними. Следовательно, навигатор жира может быть включен в процедуру определения движения в соответствии с настоящим изобретением, посредством чего улучшается точность и надежность описания движения в визуализируемой области для адаптирования визуализирующей последовательности и/или для ретроспективной коррекции движения.
Следует отметить, что отдельные сигналы воды и жира, содержащиеся в сигналах навигатора, обеспечивают дополняющую друг друга информацию о движении исследуемого анатомического объекта, так что в соответствии с настоящим изобретением можно использовать объединенные навигаторы воды и жира для улучшенной сегментации и описания движения. В соответствии с изобретением данные о перемещении и/или вращении можно, таким образом, извлекать из сигналов воды и сигналов жира взятых по отдельности или в комбинации.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения сигналы визуализации получают посредством одноточечного, а также многоточечного метода Диксона, причем изображение воды и изображение жира реконструируют из сигналов визуализации. Поскольку в способе навигаторов в соответствии с настоящим изобретением принимаются во внимание сигналы как воды, так и жира, достигается лучшая сегментация соответствующих структур и, следовательно, более точное определение движения.
Получение сигналов навигатора посредством метода Диксона, предпочтительно, объединяют с другими способами получения сигналов навигатора, такими как так называемый навигатор k-пространства или сигналы навигатора, которые генерируются внешними датчиками движения, например с помощью камеры, которая следит за (респираторным) движением пациента. Примечательно, что навигатор k-пространства основан на несогласованности данных k-пространства. Движение можно контролировать посредством навигаторов k-пространства или посредством внешних датчиков при относительно высокой скорости, и когда обнаруживается, что движение превышает предварительно установленный порог, то получают сигналы навигатора посредством метода Диксона. Таким образом, получение сигналов навигатора посредством метода Диксона чередуют с получением навигаторов k-пространства или навигаторов от внешних датчиков. Последние навигаторы требуют меньшего времени сбора данных, чем навигаторы Диксона, поэтому с помощью навигаторов k-пространства или внешних датчиков можно отслеживать движение с более высокой скоростью. Только когда обнаруживается, что движение превышает предварительно установленный порог, получают навигаторы Диксона. Таким образом сочетают отслеживание движения с высокой скоростью с преимуществами навигаторов Диксона, при этом достигая относительно малого времени получения сигналов навигатора. Сокращение времени получение сигнала альтернативно делает возможным трехмерный метод Диксона, например в том смысле, что получают несколько навигаторов в трех взаимно поперечных направлениях, которые представляют объемное движение для областей воды и жира по отдельности. Это делает возможной коррекцию объемного движения.
В соответствии с другим предпочтительным вариантом осуществления настоящего изобретения карту B0, указывающую пространственные (и временные) изменения главного магнитного поля, извлекают из сигналов навигатора. Извлечение карты B0 тем самым полезно настолько, насколько движение вызывает изменения пространственного изменения главного магнитного поля B0. Коррелирующие с движением изменения B0 можно обычно наблюдать при всех значениях напряженности главного магнитного поля, но они обладают особенно нежелательным воздействием на качество изображений при сильных полях B0 (3 тесла или более). Как упомянуто выше, карту поля B0 можно получать вместе с сигналами воды и сигналами жира посредством многоточечной последовательности Диксона, которую используют в качестве навигационной последовательности в соответствии с настоящим изобретением. Данный навигатор B0 может быть выгодно использован для адаптирования настроек шиммирования МР-устройства во время получения сигналов визуализации. Таким образом, могут быть компенсированы вызываемые движением изменения распределения поля B0. Даже если в указанном поле зрения движение не обнаруживается, движение, происходящее за пределами поля зрения, может вызывать изменения B0, которые могут быть обнаружены с помощью данного типа навигатора. Например, при сверхвысоких напряженностях поля (7 Т) вызываемые дыханием изменения B0 могут приводить к ухудшению изображения в области головы (где не происходит никакого движения). Чередующиеся навигаторы изображения в соответствии с настоящим изобретением могут изображать данные изменения B0 и делать возможными соответствующую компенсацию или коррекцию. Другие типы навигаторов (например навигаторы k-пространства) можно сочетать со способом настоящего изобретения, и они позволяют детектировать изменения B0 и переключать навигатор изображения. Кроме того, зависящую от времени карту B0 можно использовать для ретроспективной коррекции МР-изображения на этапы реконструкции изображения.
Поскольку карту воды, карту жира и карту B0 можно реконструировать из сигналов навигатора, получаемых в соответствии с настоящим изобретением, данные карты можно использовать для сегментации, для того чтобы извлекать область воды и область жира в объеме навигатора. Область воды и область жира представляют собой области в объеме навигатора, которые содержат главным образом воду и жировую ткань соответственно. Исходя из этого можно определять настройки шиммирования, которые максимизируют однородность B0 или в области воды, или в области жира. Также можно определять настройки шиммирования таким образом, чтобы находить компромисс, обеспечивающий подходящую однородность B0 как в области воды, так и в области жира.
В соответствии с еще одним вариантом осуществления настоящего изобретения МР-частоту (F0) можно автоматически извлекать из карты B0, и МР-устройством можно управлять соответствующим образом, например посредством установки генератора частоты МР-устройства на извлеченное значение частоты. Поскольку карту B0 получают из сигналов навигатора в соответствии с настоящим изобретением, корректную МР-частоту для получения диагностического МР-изображения конкретной области можно извлекать непосредственным образом. Следует отметить, что метод Диксона для получения сигналов навигатора также предоставляет информацию об однородности главного (B0) поля, а также о тех областях в теле пациента, которые содержат соответственно преимущественно воду или жир. То есть на основании навигаторов Диксона пользователь может выбирать области, которые (i) содержат преимущественно воду и (ii) имеют высокую степень однородности главного поля (B0). Из сигналов магнитного резонанса от данной выбранной области получают точное абсолютное значение резонансной частоты воды, которое можно использовать для точной настройки РЧ-системы магнитно-резонансной системы исследований. Кроме того, определение абсолютной резонансной частоты воды можно обновлять во время визуализации, поскольку навигаторы Диксона получают неоднократно. Выбор оптимального коробчатого объема для точного определения МР-частоты (т.е. резонансной частоты воды) как таковой упомянут в международной заявке WO 2012073159 A2.
Способ настоящего изобретения, описанный до данного места, может быть осуществлен посредством МР-устройства, включающего в себя по меньшей мере одну катушку главного магнита для создания главного магнитного поля в объеме исследования, ряд градиентных катушек для создания переключаемых градиентов магнитного поля в различных пространственных направлениях в объеме исследования, по меньшей мере одну РЧ-катушку для создания РЧ-импульсов в объеме исследования и/или для приема МР-сигналов из тела пациента, расположенного в объеме исследования, блок управления для управления временной последовательностью РЧ-импульсов и переключаемых градиентов магнитного поля и блок реконструкции для реконструирования МР-изображений из принимаемых МР-сигналов. Способ настоящего изобретения, предпочтительно, реализуется посредством соответствующего программирования блока реконструкции и/или блока управления МР-устройства.
Способ настоящего изобретения может быть успешно осуществлен на большинстве МР-устройств, применяемых в настоящее время в клинической практике. С этой целью необходимо только использовать компьютерную программу, посредством которой МР-устройство управляется так, что оно выполняет вышеописанные этапы способа настоящего изобретения. Компьютерная программа может или быть расположена на носителе данных, или быть расположена в сети передачи данных таким образом, чтобы ее загружали для инсталляции в блок управления МР-устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи раскрывают предпочтительные варианты осуществления настоящего изобретения. Следует понимать, однако, что данные чертежи выполнены исключительно с целью иллюстрации, а не как определение пределов настоящего изобретения. На чертежах:
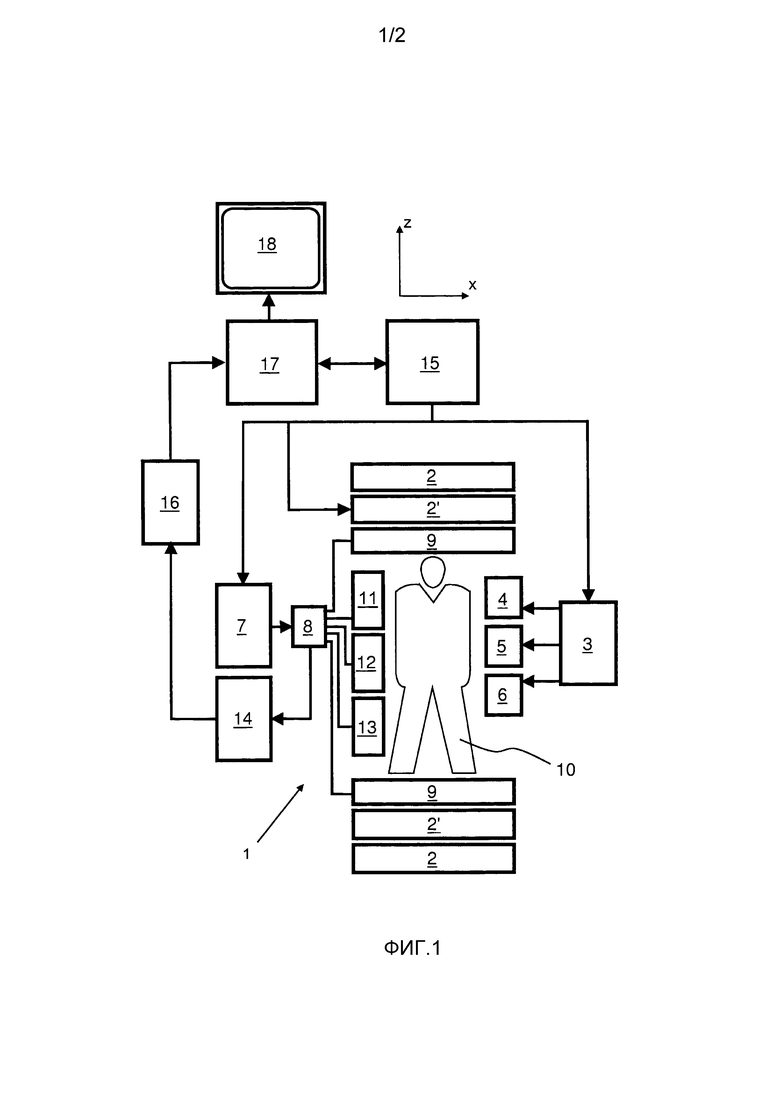
фиг. 1 показывает МР-устройство для осуществления способа настоящего изобретения;
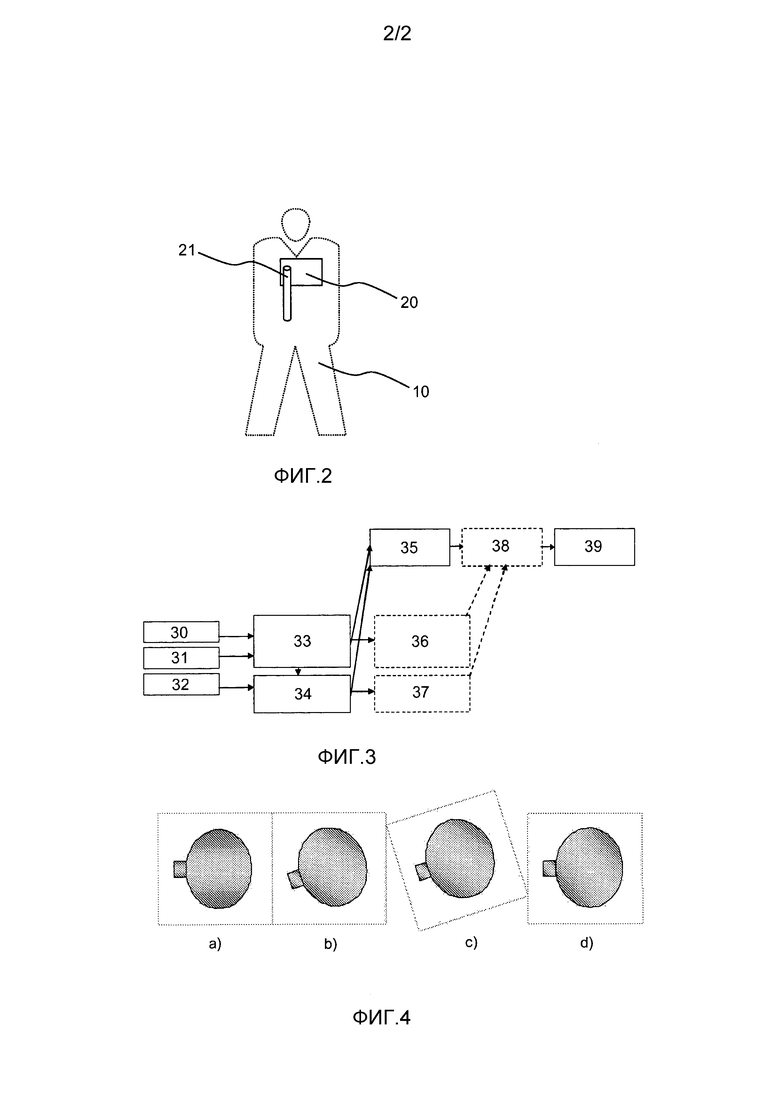
фиг. 2 схематически показывает положения исследуемого объема и объема навигатора внутри тела пациента;
фиг. 3 показывает блок-схему, схематически иллюстрирующую способ настоящего изобретения;
фиг. 4 показывает пример применения в отношении головы в соответствии с настоящим изобретением, который схематически иллюстрирует коррекции геометрии движения и поля B0.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг. 1 показано МР-устройство 1. Данное устройство содержит сверхпроводящие или резистивные катушки 2 главного магнита, такие что создается по существу однородное постоянное по времени главное магнитное поле B0 вдоль оси z во всем объеме исследования. Устройство дополнительно содержит комплект (1-го, 2-го и - если применимо - 3-го порядка) шиммирующих катушек 2′, причем протекание тока через отдельные шиммирующие катушки комплекта 2′ является управляемым с целью минимизации отклонений B0 в объеме исследования.
Система создания и управления магнитным резонансом прикладывает серии РЧ-импульсов и переключаемых градиентов магнитного поля, для того чтобы инвертировать или возбуждать ядерные магнитные спины, вызывать магнитный резонанс, рефокусировать магнитный резонанс, управлять магнитным резонансом, пространственно и как-то иначе кодировать магнитный резонанс, насыщать спины и тому подобное, для того чтобы осуществлять МР-томографию.
Более конкретно, градиентный импульсный усилитель 3 прикладывает импульсы тока к выбранным градиентным катушкам 4, 5 и 6 для всего тела вдоль осей x, y и z объема исследования. Цифровой РЧ-излучатель 7 передает РЧ-импульсы или импульсные пакеты через переключатель 8 приема/передачи на РЧ-катушку 9 для всего тела, для того чтобы передавать РЧ-импульсы в объем исследования. Типичная МР-томографическая последовательность состоит из пакета сегментов РЧ-импульсов малой продолжительности, которые вместе друг с другом и любыми прикладываемыми градиентами магнитного поля осуществляют выбранную операцию с ядерным магнитным резонансом. РЧ-импульсы используют для того, чтобы насыщать, возбуждать резонанс, инвертировать намагниченность, рефокусировать резонанс или управлять резонансом и выбирать часть тела 10, расположенную в объеме исследования. МР-сигналы также принимаются РЧ-катушкой 9 для всего тела.
Для создания МР-изображений ограниченных областей тела 10 посредством параллельной визуализации комплект локальных матричных РЧ-катушек 11, 12, 13 помещают рядом с областью, выбранной для визуализации. Матричные катушки 11, 12, 13 можно использовать для приема МР-сигналов, индуцированных РЧ-излучением катушки для всего тела.
Получаемые в результате МР-сигналы принимаются РЧ-катушкой 9 для всего тела и/или матричными РЧ-катушками 11, 12, 13 и демодулируются приемником 14, предпочтительно включающим в себя предусилитель (не показан). Приемник 14 соединен с РЧ-катушками 9, 11, 12 и 13 посредством переключателя 8 приема/передачи.
Главный компьютер 15 управляет протеканием тока через шиммирующие катушки 2′, а также градиентный импульсный усилитель 3 и излучатель 7 для создания любой из множества МР-томографических последовательностей, таких как эхо-планарная визуализация (EPI), эхо-объемная визуализация, визуализация с помощью градиентного и спинового эха, визуализация с помощью быстрого спинового эха и тому подобное. Для выбранной последовательности приемник 14 принимает одну или множество строк МР-данных в быстрой последовательности после каждого возбуждающего РЧ-импульса. Система 16 сбора данных осуществляет аналогово-цифровое преобразование принимаемых сигналов и преобразует каждую строку МР-данных в цифровой формат, пригодный для дальнейшей обработки. В современных МР-устройствах система 16 сбора данных представляет собой отдельный компьютер, который специализируется на сборе необработанных данных изображений.
В конечном итоге цифровые необработанные данные изображений реконструируют в представление в виде изображений с помощью процессора 17 реконструкции, который применяет преобразование Фурье или другие соответствующие алгоритмы реконструкции, такие как SENSE или SMASH. МР-изображение может представлять плоский срез пациента, массив параллельных плоских срезов, трехмерный объем или тому подобное. Затем изображение сохраняют в памяти для хранения изображений, где к нему можно получать доступ для преобразования срезов, проекций или других частей представления в виде изображений в подходящий формат для визуализации, например, посредством видеомонитора 18, который обеспечивает пригодное для восприятия человеком отображение итогового МР-изображения.
Фиг. 2 показывает положения пространственно ограниченного исследуемого объема 20 и объема 21 навигатора внутри тела 10 в соответствии с настоящим изобретением. По существу известный метод навигаторов позволяет возбуждать ядерную намагниченность и получать соответствующие сигналы навигатора в пространственно ограниченном объеме 21 навигатора в форме подобного карандашу луча. Фиг. 2 иллюстрирует применение, в котором сигналы визуализации получают из исследуемого объема 20, включающего в себя, например, сердце пациента. Большое различие в амплитуде МР-сигнала между легким и диафрагмой говорит об идеальном для детектирования состояния дыхания пациента размещении объема 21 навигатора над границей раздела диафрагма/легкое. В соответствии с настоящим изобретением сигналы навигатора получают от объема 21 навигатора посредством одно- или многоточечного метода Диксона. Соответствующую навигационную последовательность создают, чередуя ее с визуализирующей последовательностью, которую используют для получения сигналов визуализации от исследуемого объема 20. Из сигналов навигатора извлекают аффинные преобразования движения, включая данные о перемещении и/или вращении. Эти аффинные преобразования движения отражают дыхательное движение пациента и используются для адаптирования визуализирующей последовательности, например, посредством изменения положения и/или ориентации исследуемого объема 20 внутри тела 10 в соответствии с детектированным состоянием дыхания или посредством адаптирования величины используемого градиента. Кроме того, данные о преобразовании движения можно использовать для ретроспективной коррекции движения во время реконструкции МР-изображения, получаемого от исследуемого объема 20.
Блок-схема на фиг. 3 иллюстрирует способ настоящего изобретения более подробно. Поскольку сигналы навигатора получают посредством метода Диксона, фактически доступно три навигатора, а именно навигатор 30 воды, навигатор 31 жира и навигатор 32 B0. Навигаторы 30, 31 воды и жира фактически представляют собой соответственно карты воды и жира низкого разрешения, которые реконструируют из сигналов одно-, двух- или трехмерного навигатора низкого разрешения. Навигатор 30 воды и навигатор 31 жира в соответствии с настоящим изобретением используют для обеспечения высококачественной сегментации и определения соответствующего движения в исследуемом объеме 20. С этой целью навигатор 30 воды и навигатор 31 жира используют в комбинации для проспективного описания движения на этапе 33 способа. На данном этапе аффинные преобразования движения, такие как данные о перемещении и/или вращении, извлекают из навигаторов 30, 31. Навигатор 32 B0 используют на этапе 34 способа для адаптирования настроек шиммирования МР-устройства 1 соответствующим образом и для адаптирования МР-частоты МР-устройства 1. Данные о перемещении и/или вращении, извлеченные на этапе 33, применяют на этапе 34 способа, а также для того, чтобы адаптировать настройки шиммирования в соответствии с положением и ориентацией исследуемого объема 20, которые могли измениться вследствие детектированного движения. На этапе 35 часть тела 10 подвергают воздействию визуализирующей последовательности для получения сигналов визуализации от исследуемого объема 20. Параметры визуализирующей последовательности адаптируют в соответствии с аффинными преобразованиями движения, такими как перемещение и/или вращение, извлеченными на этапе 33. Кроме того, МР-частоту и настройки шиммирования, применяемые во время этапа 35 получения изображения, адаптируют на основании карты B0. Визуализирующую последовательность адаптируют, например, посредством изменения положения и ориентации исследуемого объема 20 в соответствии с детектированным состоянием дыхания и/или в соответствии с детектированным изменением состояния движения. Необязательно, извлеченные аффинные преобразования движения, включающие в себя данные о перемещении и/или вращении, используют на этапе 36 для сбора информации для ретроспективный коррекции движения. Аналогичным образом, карту B0 используют на этапе 37 для сбора информации для ретроспективной коррекции неоднородностей B0. Данную информацию используют на этапе 38, для того чтобы фактически скорректировать сигналы визуализации, получаемые на этапе 35, как часть процесса реконструкции изображения. Этап 38 может также содержать ретроспективную перенастройку получаемых сигналов визуализации в соответствии с детектированным движением и искажениями поля B0. Окончательное МР-изображение реконструируют на этапе 39.
Фиг. 4 иллюстрирует пример применения настоящего изобретения в отношении головы. Фиг. 4a) схематически показывает изображение головы, получаемое при исходном пространственном распределении поля B0. Распределение B0 указано на фиг. 4 штриховкой. На фиг. 4b) имело место движение головы, которое одновременно вызвало изменение распределения поля B0. Навигаторы воды и жира, получаемые в соответствии с настоящим изобретением, используют для определения перемещения и вращения головы и для адаптации поля зрения соответствующим образом. Это проиллюстрировано на фиг. 4c) и 4d). Однако, как можно видеть на фиг. 4d), изменения B0 не скорректированы посредством геометрического адаптирования поля зрения. Следовательно, далее может быть применен навигатор B0 настоящего изобретения для адаптирования настроек шиммирования соответствующим образом и - если требуется - для адаптирования МР-частоты. После последующего этапа визуализации будет снова получено МР-изображение, как оно показано на фиг. 4a), в котором вызванные движением геометрические изменения, а также изменения распределения B0 скомпенсированы.
Использование: для МР-томографии по меньшей мере части тела. Сущность изобретения заключается в том, что выполняют следующие этапы: подвергание части тела (10) воздействию визуализирующей последовательности, содержащей один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, для получения сигналов визуализации; подвергание части тела (10) воздействию навигационной последовательности, прикладываемой по меньшей мере единожды до, во время или после визуализирующей последовательности, причем навигационная последовательность содержит один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, управляемых таким образом, что сигналы навигатора получают посредством одноточечного или многоточечного метода Диксона; извлечение данных о перемещении, и/или вращении, и/или сдвиге из сигналов навигатора, причем данные о перемещении, и/или вращении, и/или сдвиге отражают движение, происходящее внутри тела (10) во время получения сигналов визуализации; реконструирование МР-изображения из сигналов визуализации, причем данные о перемещении, и/или вращении, и/или сдвиге используются для адаптирования визуализирующей последовательности и/или для коррекции движения во время реконструкции МР-изображения. Технический результат: обеспечение возможности МР-томографии с надежным детектированием движения и высоким качеством изображений. 3 н. и 7 з.п. ф-лы, 4 ил.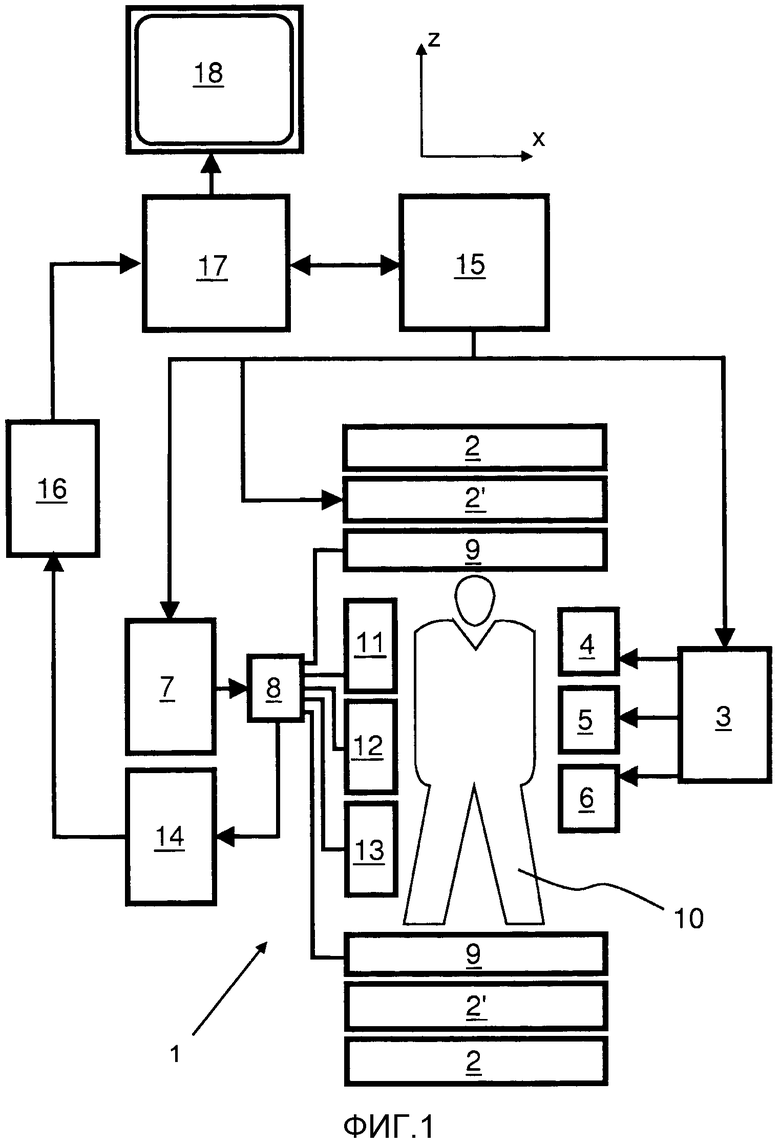
1. Способ MP-томографии по меньшей мере части тела (10), помещенного в главное магнитное поле В0 в объеме исследования МР-устройства (1), причем данный способ содержит следующие этапы:
- подвергание части тела (10) воздействию визуализирующей последовательности, содержащей один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, для получения сигналов визуализации;
- подвергание части тела (10) воздействию навигационной последовательности, прикладываемой по меньшей мере единожды до, во время или после визуализирующей последовательности, причем навигационная последовательность содержит один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, управляемых таким образом, что сигналы навигатора получают посредством одноточечного или многоточечного метода Диксона, и сигналы навигатора формируют в виде отдельных сигналов воды и жира;
- извлечение данных о перемещении, и/или вращении, и/или сдвиге из сигналов навигатора, причем данные о перемещении, и/или вращении, и/или сдвиге отражают движение, происходящее внутри тела (10);
- реконструирование MP-изображения из сигналов визуализации,
причем данные о перемещении, и/или вращении, и/или сдвиге используются для адаптирования визуализирующей последовательности и/или для коррекции движения во время реконструкции MP-изображения.
2. Способ по п. 1, в котором данные о перемещении, и/или вращении, и/или сдвиге извлекают из сигналов воды.
3. Способ по п. 1 или 2, в котором данные о перемещении, и/или вращении, и/или сдвиге извлекают из сигналов жира.
4. Способ по п. 1, в котором сигналы визуализации получают посредством одноточечного или многоточечного метода Диксона, причем изображение воды и изображение жира реконструируют из сигналов визуализации.
5. Способ по п. 1, в котором получение сигналов навигатора, получаемых посредством многоточечного метода Диксона, чередуют с получением сигналов навигатора k-пространства или сигналов движения от внешнего датчика и для коррекции движения во время реконструкции MP-изображения используют модель движения.
6. Способ по п. 1, в котором карту В0, указывающую пространственные и/или временные изменения главного магнитного поля, извлекают из сигналов навигатора, получаемых посредством многоточечного метода Диксона, и настройки шиммирования МР-устройства (1) адаптируют во время получения сигналов визуализации на основании карты В0.
7. Способ по п. 1, в котором карту В0, указывающую пространственные и/или временные изменения главного магнитного поля, и областей, содержащих преимущественно воду, извлекают из сигналов навигатора, получаемых посредством многоточечного метода Диксона, выбирают область высокой однородности В0, содержащую преимущественно воду, и определяют фактическую частоту резонанса MP воды из выбранной области.
8. Способ по п. 7, в котором карту В0 используют для коррекции пространственного изменения главного магнитного поля во время реконструкции MP-изображения.
9. MP-устройство, содержащее по меньшей мере одну катушку (2) главного магнита для создания главного магнитного поля В0 в объеме исследования, ряд градиентных катушек (4, 5, 6) для создания переключаемых градиентов магнитного поля в различных пространственных направлениях в объеме исследования, по меньшей мере одну РЧ-катушку (9) для создания РЧ-импульсов в объеме исследования и/или для приема MP-сигналов из тела (10) пациента, расположенного в объеме исследования, блок (15) управления для управления временной последовательностью РЧ-импульсов и переключаемых градиентов магнитного поля и блок (17) реконструкции для реконструирования MP-изображений из принимаемых MP-сигналов, причем MP-устройство (1) сконфигурировано с возможностью осуществлять следующие этапы:
- подвергание части тела (10) воздействию визуализирующей последовательности, содержащей один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, для получения сигналов визуализации;
- подвергание части тела (10) воздействию навигационной последовательности, прикладываемой по меньшей мере единожды до, во время или после визуализирующей последовательности, причем навигационная последовательность содержит один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, управляемых таким образом, что сигналы навигатора получают посредством одноточечного или многоточечного метода Диксона и сигналы навигатора формируют в виде отдельных сигналов воды и жира;
- извлечение данных о перемещении, и/или вращении, и/или сдвиге из сигналов навигатора, причем данные о перемещении, и/или вращении, и/или сдвиге отражают движение, происходящее внутри тела (10);
- реконструирование MP-изображения из сигналов визуализации,
причем данные о перемещении, и/или вращении, и/или сдвиге используются для адаптирования визуализирующей последовательности и/или для коррекции движения во время реконструкции MP-изображения.
10. Носитель данных, содержащий исполняемые компьютером команды для предписания MP-устройству (1) осуществлять способ MP-визуализации по меньшей мере части тела, содержащий:
- создание визуализирующей последовательности, содержащей один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля для получения сигналов визуализации;
- создание навигационной последовательности, прикладываемой по меньшей мере единожды до, во время или после визуализирующей последовательности, причем навигационная последовательность содержит один или несколько РЧ-импульсов и переключаемых градиентов магнитного поля, управляемых таким образом, что сигналы навигатора получают посредством одноточечного или многоточечного метода Диксона и сигналы навигатора формируют в виде отдельных сигналов воды и жира;
- извлечение данных о перемещении, и/или вращении, и/или сдвиге из сигналов навигатора, причем данные о перемещении, и/или вращении, и/или сдвиге отражают движение, происходящее внутри тела;
- реконструирование MP-изображения из сигналов визуализации,
причем данные о перемещении, и/или вращении, и/или сдвиге используются для адаптирования визуализирующей последовательности и/или для коррекции движения во время реконструкции MP-изображения.
| US 5636636A, 10.06.1997 | |||
| US 5502385A, 26.03.1996 | |||
| US 20110116683A1, 19.05.2011 | |||
| US 5977769A, 02.11.1999 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ МАГНИТНОГО РЕЗОНАНСА | 1999 |
|
RU2216751C2 |
| КАРДИОСИНХРОНИЗАТОР МАГНИТНО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ | 1996 |
|
RU2103916C1 |

