Изобретение касается способа получения изображений посредством магнитного резонанса (MР) объекта, размещенного в статическом магнитном поле, который содержит следующие этапы
формирование радиоимпульса возбуждения в части тела,
измерение множества семейств сигналов МР, используя множество катушек индуктивности приемного устройства вдоль траектории в k-пространстве, содержащем первое множество линий, путем применения градиента считывания и других градиентов.
формирование заключительного изображения из комбинации множества семейств измеряемых сигналов МР и зависящих от расстояния чувствительностей множества катушек индуктивности приемного устройства. Изобретение дополнительно касается устройства МР для реализации указанного способа. В данной заявке пиксели означают элементы изображения в цифровом изображении, вокселы означают элементы объема трехмерного цифрового объекта.
Подобный способ известен из статьи: Д.К. Содиксон (D.K. Sodickson) и др. Одновременное получение пространственной гармоники (ОППГ): Быстрое формирование изображений с помощью цепочки высокочастотных катушек индуктивности // Магнитный резонанс в медицине, 1997, т. 38, с. 591-603. Известный способ используют, например, в видеомониторном кардиотоническом наблюдении людей. Для снижения времени сбора данных МР в известном способе используют схему сбора субкодированных данных, в которой одновременно измеряют множество семейств сигналов МР, применяя множество катушек индуктивности приемного устройства вдоль траектории в k-пространстве, содержащем первое множество линий, используя градиент считывания и другие градиенты. Количество линий соответствует уменьшенному количеству этапов фазового кодирования по сравнению с количеством этапов фазового кодирования при обычном формировании изображений МР Фурье.
Катушки индуктивности приемного устройства можно расположить в виде цепочки поверхностных катушек индуктивности. Заключительный набор данных МР определяется из конкретной зависимости чувствительности от расстояния, набора катушек индуктивности приемного устройства и семейств измеряемых сигналов МР. Заключительный набор данных МР содержит информацию ряда линий обычного формирования изображений МР Фурье. Затем заключительное изображение перестраивается путем преобразования заключительного набора данных МР. Количество семейств сигналов МР может быть равно количеству катушек индуктивности приемного устройства в цепочке. Кроме того, конкретная зависимость чувствительности от расстояния для набора катушек индуктивности приемного устройства должна иметь синусоидальную форму.
Благодаря одновременному измерению данных МР время сбора данных уменьшается. Коэффициент преобразования определяется количеством линий в k-пространстве, соответствующем заключительному изображению, и количеством линий, которое используется при сборе субкодированных данных. Сокращение времени сбора данных может, например, обеспечить возможность использования в реальном времени кардиотонического формирования изображений или функционального формирования изображений. Недостаток известного способа заключается в том, что он может быть ограничен только несколькими местоположениями поля обзора и ограничен количеством ориентаций среза подлежащего отображению объекта из-за особой функции чувствительности набора катушек индуктивности. Поле обзора определяется расстоянием в направлении фазового кодирования, перекрываемым траекторией в k-пространстве.
Задачей настоящего изобретения является создание способа формирования изображения МР с улучшенной степенью свободы при выборе поля обзора и улучшенной ориентацией подлежащего изображению среза. Способ, согласно изобретению характеризуется тем, что для формирования заключительного изображения осуществляют восстановление изображений катушек индуктивности приемного устройства от каждого семейства измеряемых сигналов МР соответственно, а заключительное изображение восстанавливают из комбинации изображений катушек индуктивности приемного устройства и зависящих от расстояния чувствительностей катушек индуктивности приемного устройства.
Таким образом, восстановление заключительного изображения не зависит от особой функции чувствительности наборов катушек индуктивности приемного устройства, и ее можно применять для произвольного набора катушек индуктивности приемного устройства, а ограничения размера поля обзора и ориентации подлежащего изображению среза менее строгие. Кроме того, можно выбирать нецелочисленные коэффициенты преобразования. Этот выбор дает возможность перемещать артефакты смешивания к менее важным частям изображения. Одновременное или частично одновременное измерение наборов данных МР приводят к сокращению времени сбора данных и возможности быстрого формирования изображения МР по сравнению с обычным формированием изображения МР.
Конкретный вариант способа согласно изобретению содержит этап определения вектора изображения заключительного изображения из комбинации обобщенного обращения матрицы чувствительности и вектора изображения катушек индуктивности приемного устройства, в котором компонент вектора изображения представляет значение функции контраста ткани в местоположении элемента объема, выбранного из первого множества равноудаленных элементов объема в первом множестве смежных полей обзора.
Элемент S(i, j) матрицы чувствительности представляет чувствительность в местоположении выбранного элемента объема относительно катушки индуктивности приемного устройства, выбранной из первого множества катушек индуктивности приемного устройства, а компонент вектора изображения катушек индуктивности приемного устройства представляет значение пикселя изображения катушек индуктивности приемного устройства, соответствующего выбранной катушке индуктивности приемного устройства, где местоположение пикселя в изображении катушек индуктивности приемного устройства соответствует местоположению выбранного элемента объема в выбранном поле обзора.
Обобщенное обращение матрицы S определяется как матричное произведение (SHS)-1SH, где SH представляет комплексно сопряженную транспонированную матрицу S. Обобщенное обращение или псевдоинверсия известна в прикладной математике в следующем виде
||(S(S-a)-a|| = minx||Sx-a||.
То есть, дано векторное уравнение Sx=a, которое не имеет точного решения для х по определению, псевдоинверсия дает вектор, который лучше соответствует этому уравнению в вышеупомянутом смысле. В способе формирования согласно изобретению используется это свойство минимизации. Способ формирования изображения с помощью пикселя обеспечивает возможность включить фактическую степень смешивания в способе для снижения различных типов смешивания. В результате способ согласно изобретению обеспечивает по существу смешивание свободных заключительных изображений как в случае нецелочисленных, так и целочисленных коэффициентов преобразования.
Еще один вариант способа согласно изобретению характеризуется тем, что коэффициент преобразования получения семейств сигналов МР составляет вещественное значение, меньшее или равное количеству катушек индуктивности приемного устройства. Коэффициент преобразования определяется как коэффициент, с помощью которого расстояние между линиями траектории в k-пространстве увеличивается по сравнению с расстоянием между соседними линиями в k-пространстве при обычном формировании изображений МР Фурье. В результате время получения семейств сигналов МР пропорционально снижается. При кардиотоническом формировании изображений, например, области легочной ткани человека часто можно исключать из построения изображения, благодаря незначительному вкладу сигнала, получающегося от выбора оптимального коэффициента преобразования. Оптимальный выбор коэффициента преобразования можно осуществлять так, чтобы, например, перегибание большой интенсивности задней стенки грудной клетки человека направлялось от сердца к легочным зонам. Оптимальный выбор коэффициента преобразования может привести к различному типу смешивания в заключительном изображении.
Еще один вариант способа согласно изобретению характеризуется тем, что способ содержит этап определения величины вектора изображения из ряда первого множества равноудаленных элементов объема в заключительном поле обзора заключительного изображения, где расстояние между последующими элементами объема равно полю обзора. Таким образом, в процессе формирования заключительного изображения можно определять и учитывать фактическую степень смешивания. В результате перегиба артефакты в заключительном изображении уменьшены. В случае нецелочисленного коэффициента преобразования степень смешивания изменяется в различных пикселях заключительного изображения, поскольку изменяется фактическое количество элементов объема или вокселов, вносимое в элемент изображения отдельных изображений катушек индуктивности приемного устройства.
В общем, значение пикселя отдельного изображения катушки индуктивности приемного устройства содержит вклады от бесконечного ряда равноудаленных вокселов в соседних полях обзора. Ограничение этого ряда снижает смешивание в заключительном изображении. Например, когда коэффициент преобразования равен 2,5, первая группа пикселей отдельного изображения катушки индуктивности приемного устройства показывает двойное перекрытие, а вторая группа пикселей в отдельном изображении катушки индуктивности приемного устройства показывает тройное перекрытие.
Вклады первой группы пикселей в заключительном поле обзора определяются двумя вокселами, разделенными первым расстоянием, а вклады второй группы в заключительном поле обзора определяются тремя равноудаленными вокселами, разделенными вторым расстоянием, где второе расстояние между вокселами равно длине поля обзора отдельного изображения катушки индуктивности. В известном способе можно учитывать либо вклады только двух пикселей, либо вклады только трех пикселей и, в результате этого, в заключительном изображении присутствуют артефакты трехкратного перегиба или артефакт двукратного перегиба соответственно. Дополнительное преимущество заключается в том, что дополнительно уменьшено время перестроения заключительного изображения.
Еще один вариант способа согласно изобретению характеризуется тем, что способ содержит этап исключения элементов объема в заключительном поле обзора за пределами заранее определенной области, не содержащей объект из формирования заключительного изображения. Таким образом, локальное отношение сигнал-шум заключительного изображения может быть улучшено. Исключение элемента объема пространства измерения из процесса перестроения возможно, если заранее известно, что упомянутый элемент объема находится за пределами объекта. В этом случае от этого элемента объема не вносится сигнал, который требуется отделять от этих вкладов элементов объема объекта в перегибе элементов изображения в отдельных изображениях катушек индуктивности приемного устройства. Знание о том, содержит ли элемент объема в месте измерения структуру объекта, можно получить из первого опорного изображения, полученного от объекта на ранней стадии с помощью обычного процесса формирования изображения МР, например, способом эхо-планарного формирования изображения.
Еще один вариант способа согласно изобретению характеризуется тем, что способ содержит этап определения матрицы чувствительности из отображения чувствительности, содержащего комбинацию заранее определенных опорных изображений катушек индуктивности приемного устройства и заранее определенного опорного изображения. Таким образом, для использования в способе формирования можно получить матрицы чувствительности, которые не зависят от контраста ткани. Полученные матрицы чувствительности отражают только чувствительность катушки индуктивности и обеспечивают сглаживание. Упомянутое полученное вначале опорное изображение можно использовать в качестве заранее определенного опорного изображения.
Еще один вариант способа согласно изобретению характеризуется тем, что способ содержит этап фильтрации отображения чувствительности для получения отображений чувствительности, охватывающих зону в заключительном поле обзора, превышающую представляющую интерес зону. Примером такого отображения чувствительности является отображение чувствительности с фильтрацией нижних частот. Затем способ формирования изображения можно применять, когда изменится конфигурация ткани, поскольку чувствительность катушек индуктивности приемного устройства в первом приближении не зависит от изменений конфигурации относительно поля обзора.
Это способствует последовательному формированию изображения МР слегка перемещающегося объекта с единственным начальным опорным измерением изображения, что выгодно, например, для оперативного кардиотонического формирования изображения МР. Кроме того, полученные матрицы чувствительности не вносят шум в заключительное изображение, так что дополнительно снижается отношение сигнал-шум заключительного изображения. Этап низкочастотной фильтрации представляет собой пример такого этапа фильтрации. Другой вид фильтрации содержит этап полиномиального приближения.
Еще один вариант способа согласно изобретению характеризуется тем, что способ содержит этап получения заранее определенного опорного изображения катушек индуктивности приемного устройства способом МР, включающим последующие этапы генерирования радиоимпульса возбуждения в объекте, одновременного измерения эталонных наборов катушек индуктивности приемного устройства сигналов MP, используя первое множество катушек индуктивности приемного устройства вдоль заранее определенной траектории, содержащей второе множество линий в k-пространстве, путем применения градиента считывания и других градиентов и формирования опорных изображений катушек индуктивности приемного устройства из эталонных наборов катушек индуктивности приемного устройства измеряемых сигналов МР, где второе множество линий меньше, чем первое множество линий.
Таким образом, можно получить сведения о чувствительностях катушек индуктивности. Например, опорное измерение объекта производят с заключительным расположением катушек индуктивности приемного устройства и объекта. Опорное изображение также можно получить из комбинации опорных изображений катушек индуктивности приемного устройства.
Еще один вариант способа согласно изобретению характеризуется тем, что способ содержит этап получения заранее определенного опорного изображения способом МР, содержащим последующие подэтапы генерирования радиоимпульса возбуждения в объекте измерения эталонного семейства сигналов МР вдоль заранее определенной траектории, содержащей третье множество линий в k-пространстве, путем применения градиента считывания и других градиентов и формирования опорного изображения из измеряемых сигналов МР. Это дает заранее определенное опорное изображение объекта, которое можно использовать как опорное изображение при определении матриц чувствительности. Количество линий третьего множества может быть равно количеству линий в k-пространстве, соответствующем заключительному изображению. Преимущество применения полученного таким образом заранее определенного опорного изображения заключается в том, что сформированное изображение является откорректированной интенсивностью и содержит правильную фазовую информацию.
Изобретение дополнительно касается устройства МР для получения МР, содержащего входные клеммы для расположения катушек индуктивности приемного устройства, катушку индуктивности тела, средство для измерения множества семейств сигналов МР путем расположения катушек индуктивности приемного устройства, средство для формирования заключительного изображения из зависящей от расстояния чувствительности катушек индуктивности приемного устройства и множества семейств измеряемых сигналов МР.
Дополнительной задачей изобретения является создание устройства МР, имеющего улучшенную степень свободы в части выбора поля обзора и ориентации подлежащего изображению среза. Устройство МР согласно изобретению характеризуется тем, что содержит средство для формирования множества изображений катушек индуктивности приемного устройства и множества измеряемых семейств сигналов МР соответственно и средство для формирования заключительного изображения из комбинации множества изображений катушек индуктивности приемного устройства и зависящих от расстояния чувствительностей катушек индуктивности приемного устройства.
Эти и другие аспекты изобретения поясняются ниже со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 изображает блок-схему устройства для выполнения способа согласно изобретению;
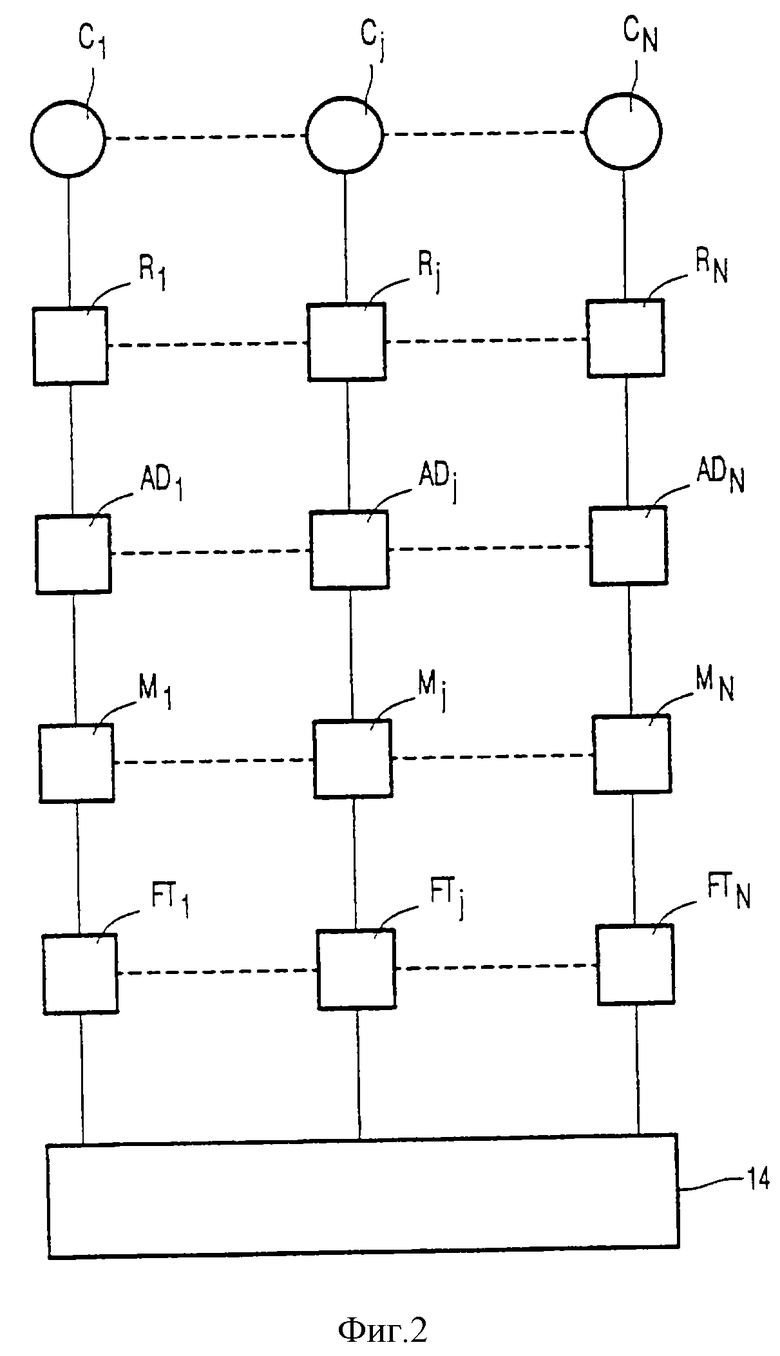
фиг.2 изображает блок-схему детализации такого устройства;
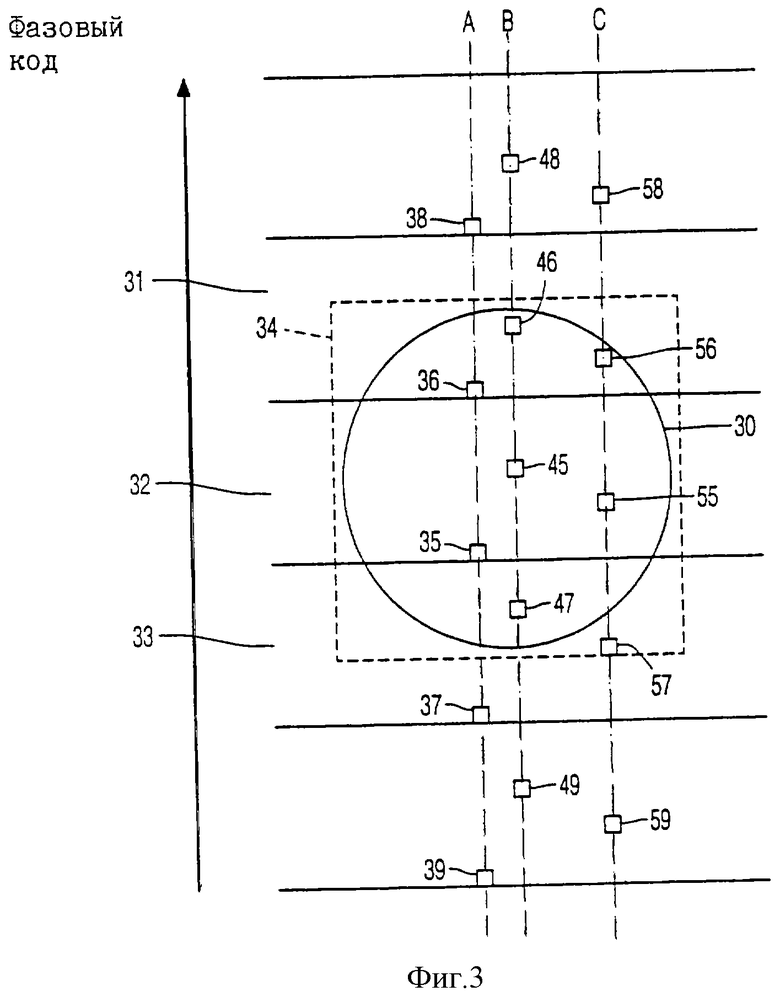
фиг.3 изображает пример заключительного поля обзора объекта;
фиг. 4 изображает пример смешивания в одном изображении катушки индуктивности приемного устройства.
Изображение или распределение может быть в двухмерном (х, у) или в трехмерном (х, у, z) представлении. Цифровое изображение состоит из элементов изображения, которые обычно называются пикселями или, в трехмерном случае, вокселами.
Как принято обычно в технике формирования изображений магнитного резонанса, сигналы считываются и преобразуются в цифровую форму, и дальнейшая обработка изображения проводится в цифровой форме. Это все подразумевается в данном описании.
В тех случаях, когда в описании делается ссылка на ядерный магнитный резонанс, подразумевается ядерный спиновый резонанс, который в определенной ситуации является протонным спиновым резонансом, а также подразумевается электронный спиновый резонанс.
Объект, который подлежит отображению, представляет собой пациента или в общем случае человека, который будет обследоваться.
Устройство 1 (фиг.1) магнитного резонанса содержит набор основных магнитных катушек индуктивности 2 для образования постоянного однородного основного магнитного поля и несколько наборов градиентных катушек индуктивности 3, 4 и 5 для наложения на основное магнитное поле дополнительных магнитных полей с управляемой напряженностью и имеющих градиент в выбранном направлении. Традиционно направление основного магнитного поля показано направлением z, два направления, перпендикулярные ему, представляют направления х и у. Градиентные катушки индуктивности возбуждаются посредством источника питания 11. Устройство дополнительно содержит средство 6 возбуждения в форме так называемой катушки индуктивности тела для испускания радиочастотных импульсов (радиоимпульсов) в объект или тело 7. Средство 6 возбуждения подсоединено к модулирующему средству 8 для генерирования и модуляции радиоимпульсов.
Кроме того, обеспечены средства для приема сигналов МР, эти средства могут быть идентичны средству 6 возбуждения или быть отдельным средством, как в настоящем изобретении, в форме цепочки катушек индуктивности 16 приемного устройства. Катушка индуктивности тела является катушкой индуктивности, окружающей тело (часть тела), и имеет в общем очень однородное распределение чувствительности, в то время как катушка индуктивности приемного устройства является катушкой индуктивности, используемой близко к одной стороне тела (части тела). Катушка индуктивности приемного устройства имеет обычно ограниченное поле обзора, высокую чувствительность, но неоднородное пространственное распределение чувствительности.
Переключатель 9 передачи-приема устроен так, чтобы отделять принимаемые сигналы от импульсов возбуждения. Принимаемые сигналы магнитного резонанса подаются в средство 10 приема и демодуляции. Средство 6 возбуждения, модулирующее средство 8 и источник питания 11, для градиентных катушек индуктивности 3, 4 и 5 управляются системой 12 управления для генерирования заранее определенной последовательности радиоимпульсов и импульсов градиентного поля. Средство демодуляции подсоединено к средству 14 обработки данных, например к компьютеру, для преобразования принятых сигналов в изображение, которое можно сделать видимым, например, на блоке 15 визуального отображения.
Если устройство 1 магнитного резонанса приведено в действие с объектом или телом 7, помещенным в магнитное поле, небольшой избыток магнитных дипольных моментов (ядерных или электронных спинов) в теле будет выравниваться в направлении магнитного поля. В равновесном состоянии это вызовет результирующую намагниченность  в материале тела 7, направленную параллельно магнитному полю. В устройстве 1 макроскопическая намагниченность
в материале тела 7, направленную параллельно магнитному полю. В устройстве 1 макроскопическая намагниченность  манипулируется излучением в направлении к телу радиоимпульсов, имеющих частоту, равную частоте ларморовской прецессии дипольных моментов, вследствие этого приводя дипольные моменты в возбужденное состояние и переориентируя намагниченность
манипулируется излучением в направлении к телу радиоимпульсов, имеющих частоту, равную частоте ларморовской прецессии дипольных моментов, вследствие этого приводя дипольные моменты в возбужденное состояние и переориентируя намагниченность  Применяя надлежащие радиоимпульсы, получают поворот макроскопической намагниченности, где угол поворота называется углом опрокидывания.
Применяя надлежащие радиоимпульсы, получают поворот макроскопической намагниченности, где угол поворота называется углом опрокидывания.
Введение изменений в магнитном поле путем применения градиентных магнитных полей оказывает локальное влияние на свойство намагниченности. После применения радиоимпульсов, измененная намагниченность в процессе испускания излучения будет иметь тенденцию возвращения в состояние теплового равновесия в магнитном поле. Хорошо выбранная последовательность радиоимпульсов и импульсов градиентного поля вызывает испускание этого излучения в виде (затухающих) сигналов магнитного резонанса, которые обеспечивают пространственную информацию относительно плотности и (или) времени релаксации некоторого типа ядер, например, ядер водорода, и вещества, в котором они находятся.
Анализируя испускаемые сигналы, захватываемые катушкой индуктивности 6 или цепочкой 16 катушек индуктивности приемного устройства, и представляя их в форме изображений, можно получить информацию относительно внутренней структуры объекта или тела 7. Затухающий сигнал магнитного резонанса непосредственно после возбуждения называется СЗИ (свободное затухание индукции). При надлежащем применении градиентов и (или) применении дополнительных импульсов возбуждения (радиоимпульсов) также можно получать эхо СЗИ и использовать для извлечения видеоинформации.
В отношении более подробного описания формирования изображений магнитного резонанса (ФИМР) и устройств ФИМР следует обратиться к обширной литературе по этому предмету, например, к книге: М.Т. Влаардингерброк (М.Т. Vlaardingerbroek). Формирование изображений магнитного резонанса, Spinger Verlag, 1996.
На фиг.2 показано средство приема и демодуляции для цепочки катушек индуктивности приемного устройства. Катушки индуктивности C1, ..., Cj, ..., Сn приемного устройства, расположенные в цепочке катушек индуктивности 16 приемного устройства, подсоединены к схемам R1, ..., Rj, ..., Rn приемных устройств аналого-цифровых преобразователей AD1, ..., ADj, ..., ADn, запоминающим устройствам M1, ..., Mj, ..., Mn и средствам FT1, ..., FTj, ..., FTn преобразования Фурье. С помощью средств преобразования Фурье предпочтительно одновременно определяются известным способом N изображений катушек индуктивности приемного устройства из сигналов МР, детектируемых N катушками индуктивности приемного устройства. N изображений катушек индуктивности приемного устройства обрабатываются в средстве 14 обработки для получения заключительного изображения.
При обычном формировании изображений МР Фурье сигналы МР измеряют вдоль траектории в k-пространстве, содержащем первое количество NF параллельных линий путем применения соответствующих градиентов считывания и других градиентов. На практике это количество NF составляет, например, 256. Для снижения времени получения заключительного изображения, расстояние между соседними линиями, вдоль которых сканируется k-пространство, увеличивается, а количество этапов фазового кодирования пропорционально уменьшается. Коэффициент преобразования RN можно выбрать в виде действительного числа или целого числа, меньшего или равного количеству катушек индуктивности N приемного устройства. В этом примере количество этапов NF фазового кодирования заключительного изображения составляет, например, 128, а количество катушек индуктивности N приемного устройства равно, например, пяти.
Средство преобразования Фурье перестраивает отдельные изображения катушек индуктивности приемного устройства из семейств сигналов МР соответственно. Каждое семейство сигналов МР принимается одной из катушек индуктивности приемного устройства. Каждое отдельное изображение катушки индуктивности приемного устройства связано с полем обзора объекта, которое уменьшено по сравнению с заключительным полем обзора объекта, относящимся к заключительному изображению, пропорционально коэффициенту преобразования. Кроме того, в этом примере поле обзора и заключительное поле обзора связаны с направлением налагаемых градиентов фазового кодирования.
Артефакты смешивания в пикселях изображения отдельной катушки индуктивности приемного устройства вызваны наложением вкладов N равноудаленных вокселов в заключительном поле обзора, где расстояние между последующими равноудаленными вокселами определяется полем обзора. Перегиб в различных пикселях a(i) вектора а изображения катушки индуктивности приемного устройства, имеющий идентичные местоположения в N последующих изображениях катушек индуктивности приемного устройства, описывается выражением
a=Sb, (1)
где векторный компонент a(i) представляет значение пикселя изображения SCI(i) катушки индуктивности приемного устройства, выбранного из N изображений катушек индуктивности приемного устройства; элемент матрицы чувствительности S(i, j) представляет комплексную чувствительность в местоположении пикселя OP(j), выбранном из N пикселей катушки индуктивности SC(i) приемного устройства, выбранных из N катушек индуктивности приемного устройства; вектор b(j) представляет значение функции контраста ткани в местоположении элемента объема в поле обзора FOV(j), выбранном из N равноудаленных элементов объема в N смежных полей обзора.
Поле обзора определяется траекторией в k-пространстве, для которого измеряются N семейств сигналов МР связанного изображения катушки индуктивности приемного устройства. Затем определяется вектор b в соответствии с выражением
|Sb-a| = min ⇒ b = S+a (2),
где S+ представляет обобщенное обращение матрицы S.
Обобщенное обращение матрицы S определяется как матричное произведение (SHS)-1SH, где SH представляет комплексно сопряженную транспонированную матрицу S. Обобщенное обращение или псевдоинверсия известна в прикладной математике следующим свойством
||S(S-a)-a|| = minx||Sx-a||.
То есть, дано векторное уравнение Sx=a, которое по определению не имеет точного решения для х. Псевдоинверсия дает вектор, который соответствует наилучшему приближению уравнения в вышеупомянутом смысле. В этом способе используется свойство минимизации. Таким образом, из уравнения (2) рассчитывают вектор b путем матричного исчисления. Этот вектор b рассчитывают для всех местоположений в поле обзора. В результате этих этапов можно получить заключительное изображение в стандартном разрешении с уменьшенными артефактами смешивания.
В некоторых случаях артефакты смешивания в заключительном изображении можно уменьшить дополнительно, выбирая такой коэффициент преобразования, что артефакты смешивания находятся за пределами интересующей области. Например, при кардиотоническом формировании изображения зону легочной ткани часто можно исключать из изображения из-за незначительного вклада сигнала. Оптимальный выбор коэффициента преобразования предпочтительно в этом случае производят так, что перегиб высокой интенсивности задней стенки грудной клетки человека направляется от сердца к легочным зонам. В том случае оптимальный выбор для коэффициента преобразования может представлять собой нецелое число, меньшее чем количество N катушек индуктивности приемного устройства в цепочке 16 катушек индуктивности приемного устройства.
Однако, когда коэффициент преобразования составляет нецелое число, в заключительном изображении встречаются различные типы артефактов смешивания. Например, когда коэффициент преобразования RN имеет значение 2,5, в заключительном изображении будет встречаться двойное перекрытие, а также тройное перекрытие.
Для уменьшения различных типов артефактов смешивания в заключительном изображении, можно определять и принимать во внимание степень смешивания, определяя размер вектора b изображения. Определение фактической степени смешивания и размера вектора b изображения для цепочки 16 катушек индуктивности приемного устройства, содержащей, например, три катушки индуктивности приемного устройства, поясняется со ссылкой на фиг.3 и фиг.4.
На фиг. 3 изображено заключительное поле обзора объекта. Фиг.3 содержит круг 30, представляющий подлежащий отображению объект, например сердце пациента или человека. Кроме того, на фиг.3 изображены три смежных поля обзора, центральное поле 32 обзора, верхнее поле 31 обзора и нижнее поле 33 обзора. Эти смежные поля обзора подогнаны в заключительном поле 34 обзора. Если количество этапов фазового кодирования заключительного изображения задано величиной NF, а количество этапов фазового кодирования отдельных изображений катушек индуктивности приемного устройства задано величиной NR, то коэффициент преобразования RN определяется выражением RN=NF/NR. Коэффициент преобразования RN предпочтительно выбирают так, что в поле 31, 32, 33 обзора отдельных изображений катушек индуктивности приемного устройства входит целое число вокселов. В этом примере число RN равняется 2,5.
Затем суммируются вклады от вокселов смежных полей 31, 33 обзора и воксела центрального поля 32 обзора, чтобы получить значение пикселя отдельного изображения катушки индуктивности приемного устройства. На фиг.3 материал объекта 30 содержит только три смежных поля обзора.
Фиг.4 представляет отдельное изображение 60 катушки индуктивности приемного устройства, содержащее наложение смежных полей 31, 32, 33 обзора. Для снижения артефактов смешивания в пикселе в изображении катушки индуктивности приемного устройства фиг. 4 разделены вносящие вклад вокселы заключительного поля 34 обзора фиг.3. Это наложение смежных полей обзора объясняется посредством примера. На фиг.3 показаны три центральных воксела 35, 45, 55 в центральной зоне 32 обзора на фиг.3 и вносящие вклад вокселы 36-39, 46-49, 56-59 в смежных полях 31, 33 обзора. Фиг.4 изображает первый, второй и третий пиксели 61, 62, 63 в отдельном изображении 60 катушки индуктивности приемного устройства, причем величины пикселей содержат бесконечный ряд потенциально вносящих вклад вокселов. На фиг.3, для простоты, показаны только вокселы 36-39, 46-49, 56-59.
Разделение в величине отдельного пикселя заключительного изображения наложения величин пикселей изображений катушек индуктивности приемного устройства выполнено при помощи уравнения (2). Для снижения времени обработки заключительного изображения размер вектора b изображения предпочтительно определяется количеством смежных вокселов в последующих полях 31, 32, 33 обзора, которые расположены в заключительном поле 34 обзора, и расстоянием между последующими равноудаленными вокселами, являющимся равным полю обзора. Следовательно, для первого центрального воксела 35, близкого к краю центрального поля обзора, в заключительном поле 34 обзора на фиг.3 присутствуют только два воксела 35, 36, в то время как для второго центрального воксела 45 в середине центрального поля 32 обзора в заключительном поле 34 обзора присутствуют три воксела 45, 46, 47, а для третьего центрального воксела 55 в заключительном поле 34 обзора присутствуют три воксела 55, 56, 57.
Для улучшения локального отношения сигнал-шум заключительного изображения способ включает дополнительный этап исключения элементов объема в заключительном поле обзора с внешней стороны заранее определенной зоны, не содержащей объект, из формирования заключительного изображения. Отношение сигнал-шум заключительного изображения можно аппроксимировать следующим образом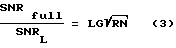
где LG≥1 представляет локальный геометрический множитель, отражающий степень линейной зависимости чувствительностей катушек индуктивности приемного устройства в наложенных местоположениях. Множитель LG рассчитывают только из матрицы S, таким образом предоставляя возможность априорно оценивать величину SRN и оптимально выбирать коэффициент RN. Для уменьшения геометрического множителя LG те вокселы, которые находятся за пределами объекта, определяемого опорным изображением, исключаются и в заключительном изображении устанавливаются на нуль.
Например, на фиг.4 можно видеть, что три воксела 55, 56, 57 в заключительном поле 34 обзора вносят вклад в пиксель 63 в отдельном изображении 60 катушки индуктивности приемного устройства. Однако из опорного изображения можно вывести, что воксел 57 не представляет какую-либо структуру объекта для внесения вклада в сигнал МР. Так, в этом примере размер вектора b изображения, содержащий пиксели заключительного изображения, определяется только двумя вносящими вклад вокселами 55, 56. Значение исключенного воксела 57 в заключительном изображении устанавливается на нуль.
Из отображений чувствительности N катушек индуктивности приемного устройства можно определять соответственно различные матрицы чувствительности S. Для получения отображений чувствительности катушек индуктивности приемного устройства, семейство опорных изображений катушек индуктивности приемного устройства низкого разрешения произвольного контраста делится с помощью пикселя на опорное изображение. Семейство опорных изображений катушек индуктивности приемного устройства низкого разрешения перестраивается из семейства предпочтительно одновременно получаемых сигналов МР, с помощью отдельных последовательностей формирований изображения МР. Семейство одновременно получаемых сигналов МР можно измерять, например, с помощью известной последовательности эхопланарного формирования изображения (ЭПФИ).
Например, как описано в цитируемом справочнике: М.Т. Влаардингерброк. Формирование изображений магнитного резонанса, Spinger Verlag, 1996, последовательность формирования изображения ЭПФИ содержит возбуждение радиоимпульса и, предпочтительно, одновременное измерение эталонных семейств сигналов МР пяти катушек индуктивности приемного устройства вдоль первого ряда параллельных линий в k-пространстве путем применения градиента считывания и других градиентов в статическом магнитном поле. Первый ряд параллельных линий соответствует уменьшенному количеству этапов фазового кодирования по сравнению с количеством NF, например, 64 этапам фазового кодирования. Первые ряды параллельных линий предпочтительно расположены вокруг центральной части k-пространства так, что получаются опорные изображения катушек индуктивности приемного устройства низкого разрешения.
Опорное изображение можно получить, например, определяя квадратный корень из суммы квадратов перестроенных опорных изображений катушек индуктивности приемного устройства. Другая возможность получения опорного изображения заключается в формировании изображения катушки индуктивности тела из опорных сигналов МР, измеряемых, например, с помощью отдельной последовательности формирования изображения, используя катушку индуктивности тела 6. Последовательности импульсов, предпочтительно используемые для измерения опорных сигналов МР, имеют тот же самый тип, что и последовательности импульсов, используемые для измерения изображений катушек индуктивности приемного устройства.
Отдельное получение сигнала МР для формирования опорного изображения включает образование радиоимпульса возбуждения и измерение опорных сигналов МР вдоль второго ряда параллельных линий в k-пространстве путем применения градиента считывания и других градиентов, типа градиента фазового кодирования. Второе количество меньше, чем количество этапов NF фазового кодирования, соответствующих заключительному изображению, например второе количество равняется 64. Вторые ряды параллельных линий предпочтительно расположены вокруг центральной части k-пространства так, что получается изображение катушек индуктивности тела низкого разрешения. Кроме того, объем опорного изображения может быть больше, чем представляющая интерес зона заключительного поля обзора.
Для обеспечения быстрого формирования изображения слегка перемещающейся части анатомического органа пациента, типа сердца пациента, с одним начальным опорным изображением, способ содержит этап фильтрации необработанных отображений чувствительности для получения отображений чувствительности, охватывающих зону, превышающую подлежащее отображению сердце. Это выгодно для оперативного кардиотонического формирования изображения. Например, упомянутый этап фильтрации содержит низкочастотный фильтр. В общем, отображения чувствительности могут ухудшаться шумом, в частности, в зонах с низким или нулевым вкладом в сигналы МР, упомянутый фильтр также снижает шум.
Однако, чтобы предотвратить ошибки на краях объекта, при отображениях чувствительности предпочтительно применяют двумерный способ подбора многочлена вместо упомянутой низкочастотной фильтрации. В соответствии с двумерным способом подбора для каждого пикселя улучшенного отображения чувствительности для отображения чувствительности локально подбирают двумерный многочлен. Улучшенное значение чувствительности пикселя получают путем оценки подобранного многочлена в местоположении соответственного пикселя в отображении чувствительности. Подбор основан на данных отображений чувствительности.
Ценные данные можно получать путем определения порога отображения чувствительности в соответствии с уровнем сигнала в изображении катушки индуктивности тела и последующего исключения изолированных пикселей, например фильтрацией минимальной окрестности. Остающиеся пиксели, плюс заранее определенная окрестность, определяемая ростом зоны, содержащей остающиеся пиксели, образуют набор, для которого посредством подборки рассчитывают улучшенные значения чувствительности. Подборка содержит вычисление подобранного многочлена L-го порядка для местоположения x0, y0 отображения чувствительности катушки индуктивности приемного устройства, по следующей формуле
Комплексные коэффициенты cij определяются так, что параметр
имеет минимальное значение, где k представляет количество учитываемых пикселей; sk обозначает величину чувствительности учитываемого пикселя xk; yk; wk - весовой коэффициент, определяемый произведением гауссова ядра с центром в точке х0, y0, и "достоверностью" sk, получаемой из уровня сигнала в изображении катушки индуктивности тела, принимаемого для определения порога. Ширина гауссова ядра соответствует требуемой степени сглаживания. Условие (5) минимальности дает линейные уравнения (L+1)2:
где

Решение уравнения (6) относительно с00 дает требуемое улучшенное значение чувствительности в местоположении х0, у0. Для снижения требуемого времени вычисления полиномиального приближения учитываются только значительные члены сумм в выражениях (7), (8), а подбор высокого порядка ограничивается граничными зонами объектов.
Кроме того, для снижения времени сканирования поле обзора заключительного изображения можно выбирать прямоугольным. Например, в двумерном функциональном формировании изображения головного мозга при равном разрешении в обоих направлениях, изображение 200•256 может оказаться достаточным для измерения сигналов МР с последовательностью формирования изображения ЭПФИ, содержащей 100 этапов фазового кодирования, когда используются две катушки индуктивности приемного устройства. Для квадратного изображения 256•256 необходимо больше этапов фазового кодирования при таком же количестве катушек индуктивности приемного устройства. Помимо возможных применений способа по изобретению в кардиотоническом формировании изображения, описанный способ также можно применять, например, в функциональном формировании изображения головного мозга человека или тела животного.

Использование: для получения изображений посредством магнитного резонанса (МР) объекта, помещенного в статическое магнитное поле. Технический результат заключается в уменьшении артефакта смешивания в заключительном изображении и возможности применения нецелочисленных коэффициентов преобразования. Способ включает одновременное измерение ряда семейств сигналов МР путем применения градиентов и цепочки катушек индуктивности приемного устройства, формирования ряда изображений катушек индуктивности приемного устройства из семейств измеряемых сигналов МР и формирования заключительного изображения из зависящей от расстояния чувствительности катушек индуктивности приемного устройства и первого множества изображений катушек индуктивности приемного устройства. Количество этапов фазового кодирования, соответствующих градиенту фазового кодирования, уменьшено с помощью коэффициента преобразования по сравнению со стандартным формированием изображения Фурье при сохранении такого же поля обзора, как при стандартном формировании изображения Фурье. Вычисление сложной матричной инверсии можно упростить посредством определения вектора заключительного изображения из комбинации обобщения матрицы чувствительности и вектора изображения катушек индуктивности приемного устройства. 2 с. и 8 з.п. ф-лы, 4 ил.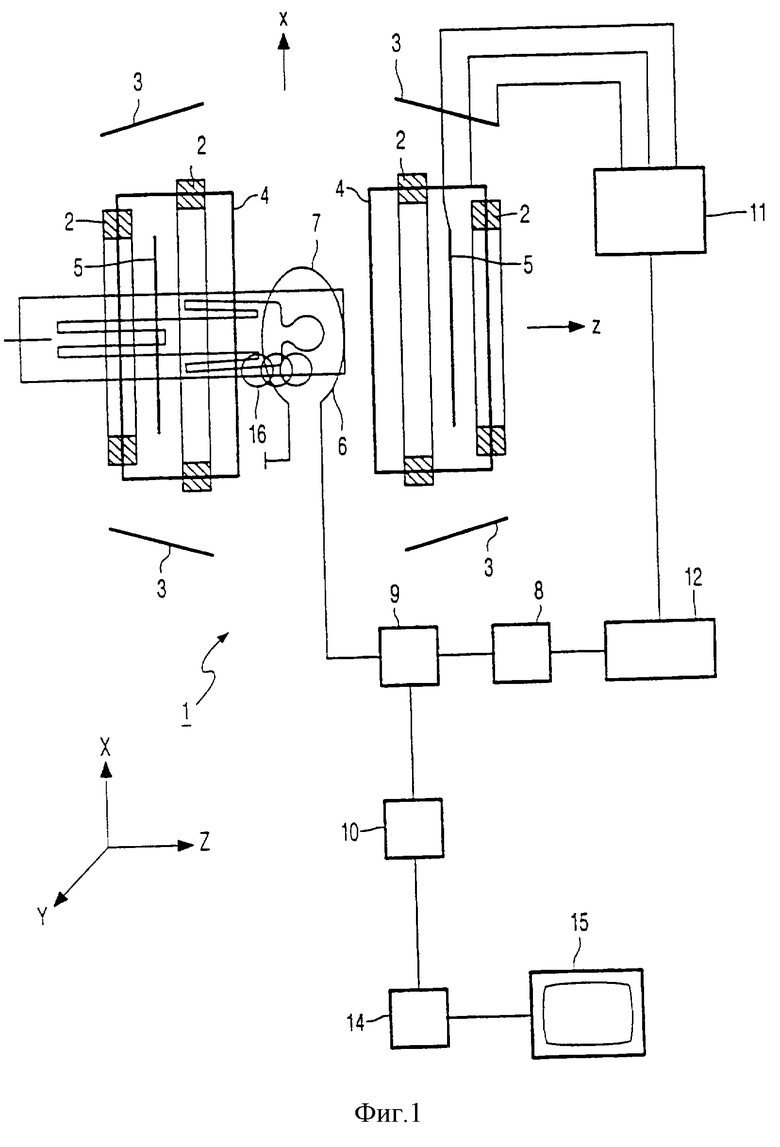
| СОДИКСОН Д.К | |||
| Одновременное получение пространственной гармоники (ОППГ) | |||
| Быстрое формирование изображений с помощью цепочки высокочастотных катушек индуктивности | |||
| Магнитный резонанс в медицине, т.38, 1997, с.591-603 | |||
| RU 2063702 С1, 20.07.1996 | |||
| УСТРОЙСТВО МАГНИТОРЕЗОНАНСНОГО ТОМОГРАФА | 1992 |
|
RU2047871C1 |
| СПОСОБ КОМПЕНСАЦИИ ВНЕШНИХ МАГНИТНЫХ ПОЛЕЙ ПОМЕХ ПРИ СОЗДАНИИ МАГНИТО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074401C1 |
| Дросельная заслонка | 1974 |
|
SU514978A1 |
| US 5541514, 30.07.1996 | |||
| JP 4075638, 10.03.1992. | |||
