ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее раскрытие относится к области магнитно-резонансной томографии (МРТ). Оно относится к способу МРТ части тела, размещенного в объеме для исследований МР-устройства. Настоящее изобретение также относится к МР-устройству и к компьютерной программе, подлежащей выполнению на МР-устройстве.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Способы формирования магнитно-резонансных изображений, которые используют взаимодействие между магнитными полями и ядерными спинами для формирования двумерных или трехмерных изображений широко используются в настоящее время, особенно в области медицинской диагностики, поскольку для визуализации мягких тканей они во многих отношениях являются лучшими, чем другие способы визуализации, не требуют ионизирующего излучения и обычно являются неинвазивными.
Согласно МР-способу, в общем, тело пациента, подлежащего обследованию, располагают в сильном, однородном магнитном поле В0, чье направление в то же время определяет ось (обычно ось z) системы координат, на которой основано измерение. Магнитное поле В0 создает разные энергетические уровни для отдельных ядерных спинов в зависимости от напряженности магнитного поля, которые могут быть возбуждены (спиновый резонанс) при приложении электромагнитного переменного поля (РЧ поля) определенной частоты (так называемой ларморовой частоты или МР частоты). С макроскопической точки зрения распределение отдельных ядерных спинов создает общий вектор намагниченности, который может быть отклонен от состояния равновесия при подаче электромагнитного импульса соответствующей частоты (РЧ-импульса), перпендикулярного оси z так, чтобы вектор намагниченности осуществлял прецессионное движение вокруг оси z. Прецессионное движение описывает поверхность конуса, чей угол апертуры называют углом отклонения вектора намагниченности. Величина угла отклонения вектора намагниченности зависит от напряженности и длительности поданного электромагнитного импульса. В случае так называемого 90°-импульса, спины отклоняются от оси z в поперечную плоскость (угол отклонения вектора намагниченности равен 90°).
После окончания РЧ-импульса, вектор намагниченности релаксирует обратно в исходное состояние равновесия, в котором вектор намагниченности в направлении z создается снова с первой постоянной Т1 времени (время спин-решеточной или продольной релаксации), и вектор намагниченности в направлении, перпендикулярном направлению z, релаксирует со второй постоянной Т2 времени (время спин-спиновой или поперечной релаксации). Изменение вектора намагниченности может быть обнаружено посредством приемных РЧ-катушек, которые расположены и ориентированы в пределах объема для исследований МР-устройства так, что изменение вектора намагниченности измеряется в направлении, перпендикулярном оси z. Уменьшение поперечного вектора намагниченности сопровождается, после подачи, например, 90°-импульса, переходом ядерных спинов (возбужденных локальными неоднородностями магнитного поля) из упорядоченного состояния с одинаковой фазой в состояние, в котором все фазы распределены однородно (дефазированы). Дефазировка может быть скомпенсирована посредством перефокусирующего импульса (например, 180°-импульса). Это создает эхо-сигнал в приемных катушках.
Для реализации пространственного разрешения в теле постоянные градиенты магнитного поля, простирающиеся вдоль трех главных осей, накладываются на однородное магнитное поле В0, что приводит к линейной пространственной зависимости частоты спинового резонанса. Сигнал, принимаемый в приемных катушках, в результате содержит компоненты разных частот, которые могут быть связаны с разными местоположениями в теле. Данные сигналов, получаемые посредством приемных катушек, соответствуют пространственно-частотной области и называются данными k-пространства. Данные k-пространства обычно включают в себя множественные линии, полученные с разным фазовым кодированием. Каждую линию k-пространства дискретизируют посредством сбора некоторого числа отсчетов. Набор данных k-пространства преобразуют в МР-изображение, например, посредством преобразования Фурье.
В МР визуализации часто требуется получить информацию об относительном вкладе воды и жира в общий сигнал, либо для подавления вклада одного из них, либо для отдельного или совместного анализа вклада их обоих. Эти вклады могут быть вычислены, если будет объединена информация от двух или более соответствующих эхо-сигналов, полученных в разные эхо-времена. Это может рассматриваться как кодирование химического сдвига, в котором дополнительное измерение, измерение химического сдвига, определяется и кодируется посредством получения двух или более МР-изображений в немного различные эхо-времена. Для разделения воды и жира, эти типы экспериментов часто называют измерениями по методу Диксона. Посредством МР визуализации по методу Диксона или МР визуализации воды/жира по методу Диксона, разделение воды и жира обеспечивают посредством вычисления вкладов воды и жира на основании двух или более соответствующих эх, полученных в разные эхо-времена. В общем, такое разделение возможно, поскольку существует известное различие частот прецессии водорода в жире и воде. В простейшей форме, изображения воды и жира генерируют посредством либо сложения, либо вычитания наборов данных «в фазе» и «не в фазе».
В последние годы было предложено несколько способов МР визуализации по методу Диксона. Кроме разных стратегий для разделения воды и жира, известные технологии, главным образом, характеризуются конкретным числом полученных эхо-сигналов (или «точек»), и ограничениями, налагаемыми на используемые эхо-времена. В общепринятых так называемых двух- и трехточечных способах требуются эхо-времена в фазе и в противофазе, в которых сигналы воды и жира являются параллельными и антипараллельными на комплексной плоскости, соответственно. Трехточечные способы были постепенно обобщены так, чтобы они допускали гибкие эхо-времена. Таким образом, они больше не ограничивают угол или фазу между сигналами воды и жира в эхо-времена определенными значениями. Таким образом, они обеспечивают большую свободу в проектировании визуализирующих последовательностей и позволяют обеспечить, в частности, компромиссное решение между приростами отношения сигнал-шум при сборе данных и потерями в отношении сигнал-шум при разделении. Выборка только двух вместо трех эхо-сигналов является желательной для уменьшения времени сканирования. Однако ограничения на эхо-времена могут фактически делать сборы данных двойного эхо-сигнала более медленными, чем сборы данных тройного эхо-сигнала. Eggers и др. (Magnetic Resonance in Medicine, 65, 96-107, 2011) предложили способ гибкой МР визуализации по методу Диксона с двойным эхо-сигналом, который позволяет устранить такие ограничения. При использовании таких способов МР визуализации по методу Диксона с более гибкими эхо-временами изображения в фазе и в противофазе больше не получаются в обязательном порядке, а синтезируются по выбору из изображений воды и жира.
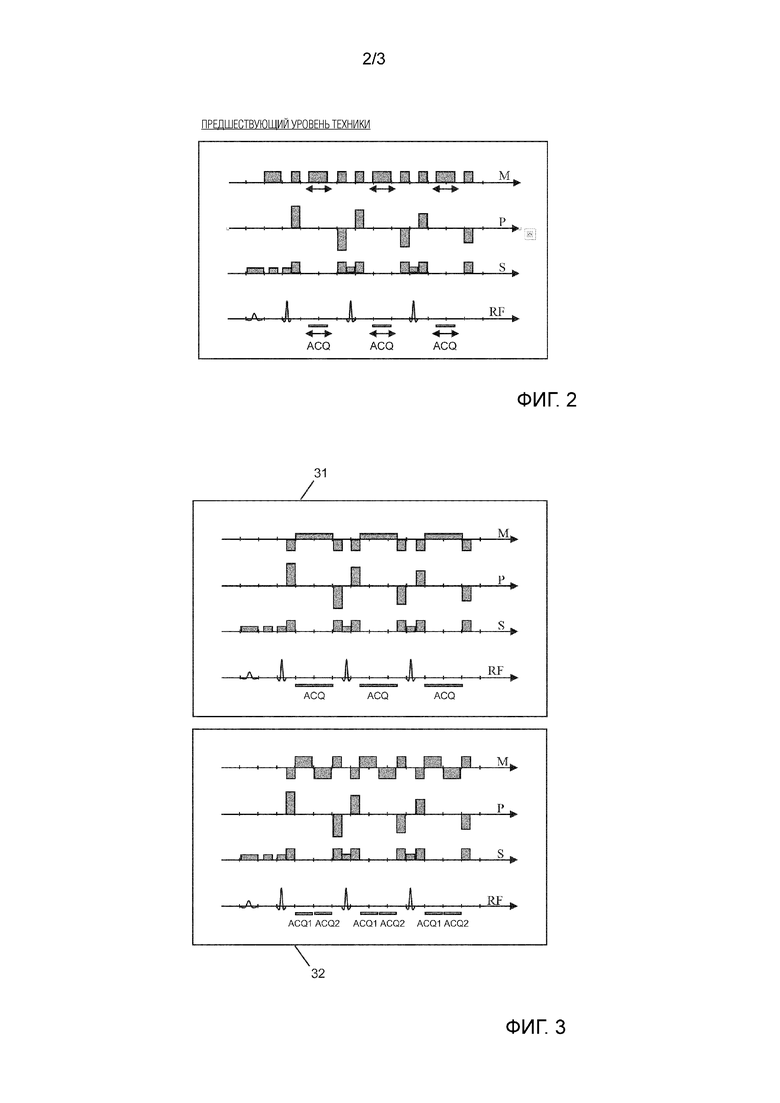
Способы МР визуализации по методу Диксона часто применяются в комбинации с быстрыми последовательностями (турбопоследовательностями) спиновых эхо с использованием подходов с множественными повторениями или множественными сборами данных. Обычно используют два или три чередующихся измерения со сдвинутыми градиентами магнитного поля считывания и окнами сбора данных. На фиг. 2 показана схематичная диаграмма последовательности импульсов общепринятой турбопоследовательности спиновых эхо-сигналов (TSE) по методу Диксона. Эта диаграмма показывает переключаемые градиенты магнитного поля в направлении (М) частотного кодирования, направлении (Р) фазового кодирования и направлении (S) выбора среза. Кроме того, эта диаграмма показывает импульсы РЧ-возбуждения и перефокусирования, а также интервалы времени, в течение которых получают эхо-сигналы, обозначенные как ACQ. Эта диаграмма охватывает сбор данных первых трех эхо-сигналов одного кадра визуализирующей последовательности. Двойные стрелки указывают на сдвиг градиентов магнитного поля считывания (сверху) и окон ACQ сбора данных (снизу) между множественными повторениями одного кадра с одинаковым фазовым кодированием. Согласно сдвигу градиентов магнитного поля считывания, получают, соответственно, разные сдвиги фаз вкладов сигналов от протонов воды и протонов жира, на которых основано разделение воды и жира по методу Диксона.
Недостаток общепринятого подхода состоит в том, что по сравнению со стандартными (не по методу Диксона) TSE-последовательностями для данного разнесения эхо-сигналов в TSE-последовательностях по методу Диксона требуется более высокий принимаемый диапазон частот. Это приводит к значительно меньшему отношению сигнал-шум. Этого можно избежать посредством использования большего разнесения эхо-сигналов. Однако в этом случае требуются более длинные последовательности эхо-сигналов или большее число последовательностей эхо-сигналов. Это приводит к меньшей рабочей зоне и меньшей четкости в реконструируемых МР-изображениях или к большим временам сканирования. Дополнительно, в случае общепринятого подхода проблему могут представлять FID-артефакты. Устранение FID-артефактов посредством усреднения двух сборов данных с противоположными фазами перефокусирующих РЧ-импульсов обычно является невозможным, поскольку это потребовало бы удвоения (еще раз) числа сборов данных, и, таким образом, потребовало бы еще большего увеличения времени сканирования.
Заявка на патент США № US2016/0033605 имеет отношение к сборам данных множественных спиновых эхо, в которых используются биполярные градиентные импульсы для образования пар эхо-сигналов между перефокусирующими РЧ-импульсами.
Из вышеупомянутого легко понять, что существует потребность в улучшенной технологии для МР визуализации по методу Диксона. Следовательно, задачей настоящего изобретения является обеспечение способа, который обеспечивает эффективное разделение воды и жира в комбинации с TSE-сбором данных.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению, раскрыт способ МР визуализации объекта, размещенного в объеме для исследований МР-устройства. Способ содержит следующие этапы:
- подвергание объекта воздействию первой визуализирующей последовательности, содержащей серию перефокусирующих РЧ-импульсов, причем в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами генерируют один эхо-сигнал,
- получение эхо-сигналов от объекта в первом принимаемом диапазоне частот с использованием униполярных градиентов магнитного поля считывания,
- подвергание объекта воздействию второй визуализирующей последовательности, которая содержит серию перефокусирующих РЧ-импульсов, причем в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами генерируют пару эхо-сигналов,
- получение упомянутой пары эхо-сигналов от объекта во втором принимаемом диапазоне частот с использованием биполярных градиентов магнитного поля считывания, причем второй принимаемый диапазон частот является более высоким, чем первый принимаемый диапазон частот, и
- реконструкция МР-изображения из полученных эхо-сигналов, при этом разделяют вклады сигналов от протонов воды и протонов жира.
Согласно настоящему изобретению две отдельные TSE-последовательности, первую и вторую визуализирующие последовательности используют для получения одиночных эхо-сигналов и пар эхо-сигналов, соответственно. Привязку по времени биполярных градиентов считывания во второй визуализирующей последовательности выбирают так, чтобы сдвинуть окна сбора данных эхо-сигналов таким образом, чтобы были обеспечены соответствующие сдвиги фаз вкладов сигналов от протонов воды и протонов жира, на которых основано разделение этих вкладов сигналов по методу Диксона на этапе реконструкции.
Биполярные градиенты магнитного поля считывания, применяемые во второй визуализирующей последовательности, предпочтительно являются более сильными, чем униполярные градиенты магнитного поля считывания первой визуализирующей последовательности, причем каждую пару эхо-сигналов получают с использованием соответствующей пары сопряженных во времени градиентов магнитного поля считывания, имеющих противоположные полярности. Таким образом, можно обеспечить, чтобы длительность каждого считывания двойного эхо-сигнала была практически такой же, как длительность считывания одиночного эхо-сигнала первого сбора данных.
Более конкретно, эхо-сигналы, генерируемые посредством первой визуализирующей последовательности, получают с использованием униполярных градиентов магнитного поля считывания, имеющих первую градиентную напряженность, и пары эхо-сигналов, генерируемых посредством второй визуализирующей последовательности, получают с использованием биполярного градиента магнитного поля считывания, имеющего вторую градиентную напряженность, которая является большей, чем первая градиентная напряженность. Одновременно, первые эхо-сигналы получают с использованием принимаемого диапазона частот сигналов, который является меньшим, чем принимаемый диапазон частот сигналов, используемый для сбора данных вторых эхо-сигналов. Весь сбор данных, таким образом, разделяется на два, обычно чередующихся, подсбора данных, выполняемые с использованием подпоследовательности низкого диапазона частот (первой визуализирующей последовательности) и подпоследовательности высокого диапазона частот (второй визуализирующей последовательности), соответственно. В подпоследовательности низкого диапазона частот высокая эффективность выборки сигналов обеспечивается выборкой первых эхо-сигналов во время большей части промежутков между перефокусирующими РЧ-импульсами. Этот низкий принимаемый диапазон частот и высокая эффективность выборки обеспечивают высокое отношение сигнал-шум. Первая визуализирующая последовательность со считыванием одиночного эхо-сигнала фактически является такой же, как стандартная TSE-последовательность и, таким образом, обеспечивает такую же эффективность выборки. Вторая визуализирующая последовательность обеспечивает меньшую эффективность выборки и обеспечивает меньшее отношение сигнал-шум для каждого эхо-сигнала, поскольку она должна покрыть такой же интеграл градиентов за, приблизительно, половину времени. Однако посредством выборки пары эхо-сигналов она обеспечивает подобную, высокую эффективность выборки и отношение сигнал-шум, что и первая визуализирующая последовательность.
МР-изображение, реконструируемое на основании эхо-сигналов, получаемых согласно настоящему изобретению, получает преимущество от более высокой эффективности выборки и более высокого отношения сигнал-шум обеих визуализирующих последовательностей. Это применимо к реконструируемому МР-изображению в фазе (включающему в себя вклады, как от сигнала воды, так и от сигнала жира, как в общепринятом изображении спинового эхо-сигнала), а также к МР-изображению воды (или МР-изображению с подавлением жира).
Другими словами, идея настоящего изобретения состоит в обеспечении эффективной TSE-визуализации по методу Диксона посредством объединения униполярного считывания одиночного эхо-сигнала в низком принимаемом диапазоне частот (первый сбор данных) с биполярным считыванием двойного эхо-сигнала в высоком принимаемом диапазоне частот (второй сбор данных) для максимизации отношения сигнал-шум.
В предпочтительном варианте осуществления настоящего изобретения каждую получаемую пару эхо-сигналов, генерируемых посредством второй визуализирующей последовательности, объединяют в виртуальный эхо-сигнал, причем вклады сигналов от протонов воды и протонов жира разделяют посредством двухточечной технологии по методу Диксона с использованием эхо-сигналов, генерируемых посредством первой визуализирующей последовательности, и виртуальных эхо-сигналов. Отношение сигнал-шум изображения одиночного эхо-сигнала, реконструированного из униполярного считывания одиночного эхо-сигнала согласно настоящему изобретению, является (идеально) в квадратный корень из двух раз большим, чем отношение сигнал-шум в двух изображениях одиночного эхо-сигнала, реконструируемых на основании биполярного считывания двойного эхо-сигнала. Поскольку сдвиги двух биполярных эхо-сигналов биполярного считывания двойного эхо-сигнала равны за исключением знака, соответствующие изображения одиночного эхо-сигнала могут быть, после соответствующей фазовой коррекции, усреднены для получения изображения одиночного эхо-сигнала с таким же отношением сигнал-шум, что и у изображения одиночного эхо-сигнала, реконструируемого на основании униполярного считывания одиночного эхо-сигнала. Однако это применимо, только если два частичных эхо-сигнала получаются при биполярном считывании двойного эхо-сигнала (например, для обеспечения предпочтительных сдвигов эхо-сигнала при конкретной напряженности поля, или для приспособления к ограничениям в отношении градиентной напряженности магнитного поля считывания и максимальной скорости изменения сигнала, налагаемым используемым МР-устройством). Это позволяет затем использовать общепринятые двухточечные способы по методу Диксона для разделения воды и жира.
Альтернативно, вклады сигналов от протонов воды и протонов жира могут быть разделены прямо посредством трехточечной технологии по методу Диксона с использованием трех соответствующих эхо-сигналов, генерируемых посредством первой и второй визуализирующей последовательностей.
Описанная выше идея виртуальных эхо-сигналов, объединяемых из биполярного считывания двойного эхо-сигнала, может быть предпочтительно применена также в комбинации с одноточечным способом по методу Диксона для разделения воды и жира. В этом случае можно обойтись без первой визуализирующей последовательности. В этом варианте осуществления, способ по настоящему изобретению содержит следующие этапы:
- подвергание объекта воздействию визуализирующей последовательности, которая содержит серию перефокусирующих РЧ-импульсов, причем в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами генерируют пару эхо-сигналов,
- получение упомянутой пары эхо-сигналов от объекта с использованием биполярных градиентов магнитного поля считывания, и
- реконструкция МР-изображения из полученных эхо-сигналов, причем каждую пару эхо-сигналов объединяют в виртуальный эхо-сигнал, причем вклады сигналов от протонов воды и протонов жира разделяют посредством одноточечной технологии по методу Диксона с использованием виртуальных эхо-сигналов. Этот вариант может быть применен в комбинации с любым другим признаком способа по настоящему изобретению, раскрытым здесь, в частности, в отношении идеи подавления FID-артефактов, описанной ниже. Одноточечный способ имеет, в основном, те же преимущества, которые были описаны выше (высокое отношение сигнал-шум, хорошая эффективность выборки). Однако он относится только к визуализации по методу Диксона с одиночным эхом, а не к визуализации по методу Диксона с двойным эхом.
Более конкретно, виртуальные эхо-сигналы могут быть вычислены в виде взвешенных средних значений векторов эхо-сигналов каждой пары эхо-сигналов. Значения вокселов в трех МР-изображениях S1 - S3 одиночного эхо-сигнала могут быть смоделированы следующим образом:
 ,
,
 ,
,
 ,
,
где W и F являются абсолютным значением сигнала воды и жира, с является комплексным весовым коэффициентом, описывающим изменение амплитуды и фазы сигнала чистого жира относительно сигнала чистой воды при (положительном) сдвиге эхо-сигнала, Р0 является векторным представлением (исходной) фазы спинового эхо-сигнала, Р является векторным представлением эффекта неоднородности главного поля, и P1 - P3 являются векторными представлениями эффекта вихревых токов. Эффектами релаксации для простоты можно пренебречь.
Если P1 - P3 известны из отдельных калибровочных измерений, то их можно исключить:
 ,
,
 ,
,
 .
.
Положив
 ,
,
 ,
,
получаем систему уравнений
 ,
,
 ,
,
 ,
,
которая может быть решена существующими комплексными трехточечными способами по методу Диксона.
Если P1 - P3 неизвестны, то вместо этого могут быть применены существующие основанные на абсолютном значении трехточечные способы по методу Диксона.
Альтернативно, предлагается сначала объединить S1 и S3 в виртуальное изображение S13 и затем применить двухточечный способ по методу Диксона на S2 и S13. Это обусловлено пониманием того, что S1 и S3 обеспечивают частично избыточную информацию, поскольку их амплитуды идеально равны.
Для простоты временно предположим, что градиентная напряженность считывания для измерений S1 и S3 вдвое больше градиентной напряженности считывания для измерения S2, и что градиентная полярность считывания для измерений S1 и S2 является одинаковой. Снова для простоты предположим, что
 ,
,
 ,
,
откуда получаем
 ,
,
,
 ,
,
и
 .
.
Из S1 и S3* можно получить P02. Поскольку можно ожидать, что эта величина будет пространственно сглаженной, ее можно отфильтровать для уменьшения шума. Затем получаем S13, например, следующим образом:
 ,
,
Необязательно, P2 может быть выявлено из S2, и S13 может быть умножено на P2*.
Без предполагаемых соотношений между P1 - P3, P02P1P3 вместо P02 может быть получено из S1 и S3*, и S13 тогда получаем, например, следующим образом:
 .
.
Альтернативно предлагается применить к S13 одноточечный способ по методу Диксона.
Компенсация потока может быть применена согласно способу по настоящему изобретения посредством обнуления моментов градиентов. В первой визуализирующей последовательности, как в общепринятой TSE-последовательности, нулевой момент градиента магнитного поля считывания обычно равен нулю как в эхо-время одиночного эхо-сигнала, так и во время последующего перефокусирующего РЧ-импульса, в то время как первый момент равен нулю только во время последующего перефокусирующего РЧ-импульса. Для градиента магнитного поля фазового кодирования, только нулевой момент равен нулю в соответствующем последующем перефокусирующем импульсе. Для градиента выбора среза, применяемые обычно градиенты магнитного поля для подавления, которые уменьшают FID-артефакты, предотвращают любую компенсацию потока.
Во второй визуализирующей последовательности только градиент магнитного поля считывания отличается от первой визуализирующей последовательности. Его нулевой момент обычно равен нулю как в эхо-времена пары эхо-сигналов, так и во время последующего перефокусирующего РЧ-импульса. Его первый момент является ненулевым в эхо-время первого из упомянутой пары эхо-сигналов, в то время как он равен нулю в эхо-времена второго из упомянутой пары эхо-сигналов. Таким образом, различия между двумя МР-изображениями одиночного эхо-сигнала, реконструированными из пары эхо-сигналов, могут быть использованы для улучшения компенсации потока. Например, амплитуда сигнала в данном положении воксела во втором МР-изображении одиночного эхо-сигнала, более высокая, чем в первом МР-изображении одиночного эхо-сигнала, может быть отнесена к связанной с потоком внутри-воксельной десфазировке и может быть скомпенсирована посредством рассмотрения только амплитуды сигнала во втором МР-изображении одиночного эхо-сигнала.
Устранение FID-артефактов может быть достигнуто согласно настоящему изобретению для биполярного считывания двойного эхо-сигнала (второй визуализирующей последовательности) посредством усреднения двух сборов данных с противоположными фазами перефокусирующих РЧ-импульсов без увеличения времени сканирования. Для этой цели, между двумя эхо-сигналами каждой пары эхо-сигналов, генерируемых посредством второй визуализирующей последовательности, переключают градиент магнитного поля фазового кодирования («меточный градиент»). Каждую пару эхо-сигналов получают дважды, каждый раз с использованием одного и того же фазового кодирования, но с противоположными фазами перефокусирующих РЧ-импульсов. Таким образом, две разные линии k-пространства получают в каждом интервале времени между двумя перефокусирующими РЧ-импульсами. Эти две линии k-пространства измеряют дважды в двух сборах данных с противоположными фазами перефокусирующих импульсов и затем отдельно усредняют для устранения FID-артефактов.
Способ по настоящему изобретению, описанный выше, может быть выполнен посредством МР-устройства, включающего в себя по меньшей мере одну главную магнитную катушку для генерации практически однородного, статического магнитного поля В0 в пределах объема для исследований, некоторое число градиентных катушек для генерации переключаемых градиентов магнитного поля в разных пространственных направлениях в пределах объема для исследований, по меньшей мере одну РЧ-катушку тела для генерации РЧ-импульсов в пределах объема для исследований и/или для приема МР-сигналов от тела пациента, расположенного в объеме для исследований, блок управления для управления временной последовательностью РЧ-импульсов и переключаемыми градиентами магнитного поля, и блок реконструкции для реконструкции МР-изображений из принимаемых МР-сигналов. Способ по настоящему изобретению может быть реализован посредством соответствующего программирования блока реконструкции и/или блока управления МР-устройства.
Способ по настоящему изобретению может быть предпочтительно выполнен на большинстве МР-устройств, применяемых в клиниках в настоящее время. Для этой цели необходимо просто использовать компьютерную программу, посредством которой МР-устройством можно управлять так, чтобы оно выполняло описанные выше этапы способа по настоящему изобретению. Компьютерная программа может находиться либо на носителе данных, либо в сети данных, и может быть загружена для инсталляции в блок управления МР-устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи раскрывают предпочтительные варианты осуществления настоящего изобретения. Однако, следует понимать, что чертежи разработаны в целях иллюстрации, а не определения пределов настоящего изобретения. На чертежах:
Фиг. 1 показывает МР-устройство для выполнения способа по настоящему изобретению;
Фиг. 2 показывает схематичную (упрощенную) диаграмму последовательности импульсов общепринятой визуализирующей TSE-последовательности по методу Диксона;
Фиг. 3 показывает схематичную (упрощенную) диаграмму последовательности первой и второй визуализирующей последовательностей согласно настоящему изобретению;
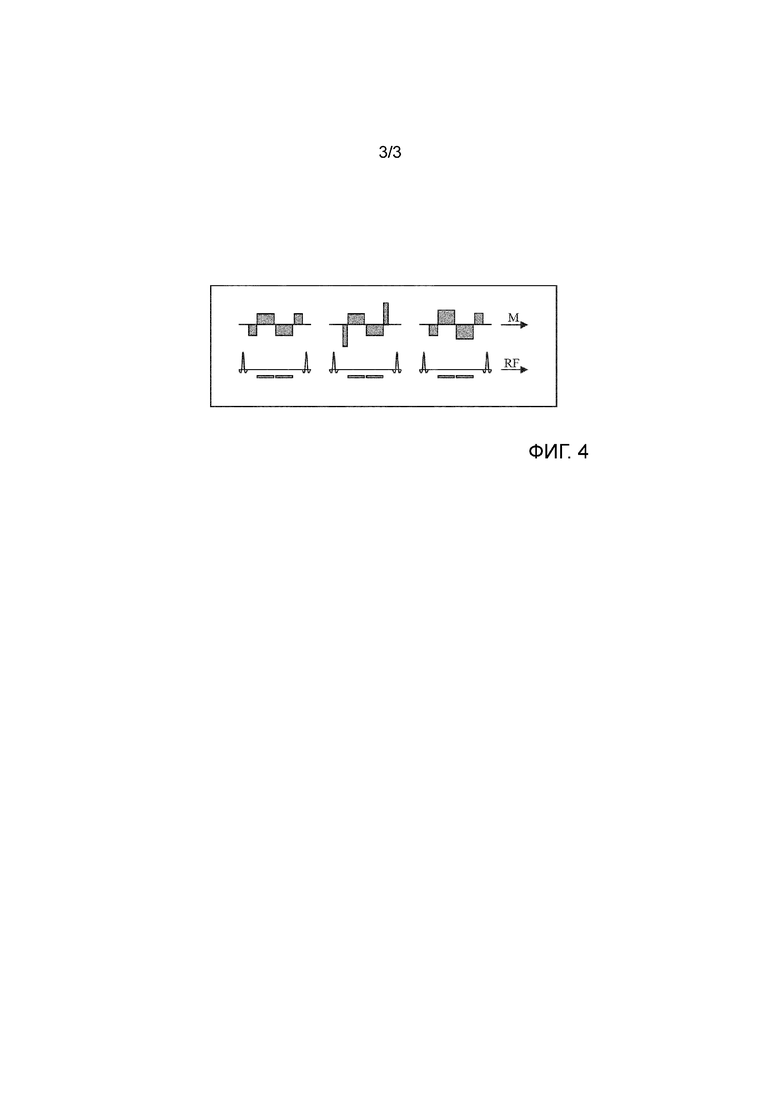
Фиг. 4 схематично показывает подробности биполярного градиента магнитного полясчитывания, применяемого во второй визуализирующей последовательности, показанной на фиг. 3.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
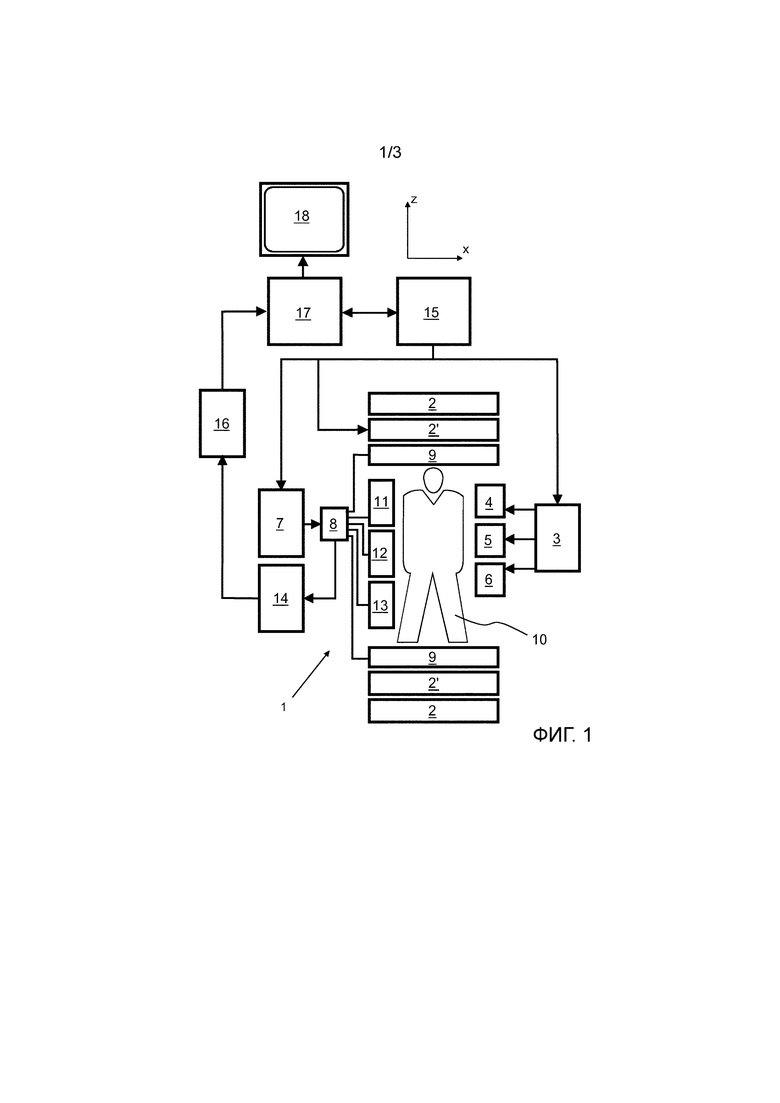
Со ссылкой на фиг. 1 в виде блок-схемы показано МР-устройство 1. Упомянутое устройство содержит сверхпроводящие или резистивные главные магнитные катушки 2, которые создают практически однородное, постоянное во времени главное магнитное поле В0 вдоль оси z через объем для исследований. Упомянутое устройство дополнительно содержит набор катушек 2' шиммирования (первого, второго и - где это применимо - третьего порядка), причем электрический ток через отдельные катушки шиммирования из набора 2' является управляемым в целях минимизации отклонений В0 в пределах объема для исследований.
Система управления и генерации магнитного резонанса применяет серию РЧ-импульсов и переключаемых градиентов магнитного поля для инвертирования или возбуждения ядерных магнитных спинов, возбуждения магнитного резонанса, перефокусирования магнитного резонанса, управления магнитным резонансом, пространственного и иного кодирования магнитного резонанса, насыщения спинов, и т.п. для выполнения МР визуализации.
Более конкретно, усилитель 3 градиентных импульсов подает импульсы тока на выбранные катушки из градиентных катушек 4, 5 и 6 для всего тела вдоль оси x, y и z объема для исследований. Цифровой радиочастотный передатчик 7 передает РЧ-импульсы или пакеты импульсов через переключатель 8 отправки/приема к РЧ-катушке 9 тела для передачи РЧ-импульсов в объем для исследований. Типичную последовательность МР визуализации формируют из пакета сегментов РЧ-импульсов с короткой длительностью, которые, вместе с любыми прикладываемыми градиентами магнитного поля, обеспечивают выбранное управление ядерным магнитным резонансом. РЧ-импульсы используют для насыщения резонанса, возбуждения резонанса, инвертирования вектора намагниченности, перефокусирования резонанса, или управления резонансом и выбора части тела 10, расположенного в объеме для исследований. МР-сигналы также принимаются РЧ-катушкой 9 тела.
Для генерации МР-изображений ограниченных областей тела 10 набор РЧ-катушек 11, 12, 13 локального массива размещают смежно с областью, выбранной для визуализации. Катушки 11, 12, 13 массива могут быть использованы для приема МР-сигналов, возбуждаемых РЧ-передачами катушки тела. Результирующие МР-сигналы принимаются РЧ-катушкой 9 тела и/или РЧ-катушками 11, 12, 13 массива и демодулируются приемником 14, предпочтительно включающим в себя предварительный усилитель (не показан). Приемник 14 соединен с РЧ-катушками 9, 11, 12 и 13 через переключатель 8 отправки/приема.
Хост-компьютер 15 управляет катушками 2' шиммирования, а также усилителем 3 градиентных импульсов и передатчиком 7 для генерации визуализирующих последовательностей по настоящему изобретению. Для выбранной последовательности приемник 14 принимает одну или множество линий МР-данных в быстрой последовательности, следующей за каждым РЧ-импульсом возбуждения. Система 16 сбора данных выполняет аналого-цифровое преобразование принимаемых сигналов и преобразует каждую линию МР-данных в цифровой формат, пригодный для дальнейшей обработки. В современных МР-устройствах система 16 сбора данных является отдельным компьютером, который специализируется на сборе необработанных данных изображения.
Наконец, цифровые необработанные данные изображения реконструируются в представление изображения процессором 17 реконструкции, который применяет преобразование Фурье или другие пригодные алгоритмы реконструкции, такие как SENSE. МР-изображение может представлять собой плоский срез через пациента, массив параллельных плоских срезов, трехмерный объем, и т.п. Изображение затем сохраняют в памяти изображений, где к нему может быть обеспечен доступ для преобразования срезов, проекций, или других частей представления изображения в пригодный формат для визуализации, например, через видеомонитор 18, который обеспечивает считываемое человеком отображение результирующего МР-изображения.
Согласно настоящему изобретению эффективная TSE-визуализация по методу Диксона обеспечивается посредством объединения униполярного считывания одиночного эхо-сигнала в низком принимаемом диапазоне частот с биполярным считыванием двойного эхо-сигнала в высоком диапазоне частот для максимизации отношения сигнал-шум.
Это показано на фиг. 3.
Фиг. 3 показывает диаграмму 31 последовательности импульсов TSE-последовательности, образующей первую визуализирующую последовательность согласно настоящему изобретению. Диаграмма 31 показывает переключаемые градиенты магнитного поля в направлении (М) частотного кодирования, направлении (Р) фазового кодирования и направлении (S) выбора среза. Кроме того, эта диаграмма показывает РЧ-импульсы возбуждения и перефокусирования, а также обозначенные ACQ интервалы времени, в течение которых получают эхо-сигналы. Одиночный эхо-сигнал получают в течение каждого интервала ACQ в первом (низком) принимаемом диапазоне частот для получения высокого отношения сигнал-шум. Для этой цели выбирают сравнительно слабые градиенты магнитного поля униполярного считывания (в М-направлении). Высокую эффективность выборки обеспечивают в первой визуализирующей последовательности посредством выборки МР-сигналов в течение большей части промежутков между перефокусирующими импульсами.
Фиг. 3 показывает дополнительную диаграмму 32 последовательности импульсов для второй визуализирующей последовательности согласно настоящему изобретению. Вторая визуализирующая последовательность также является TSE-последовательностью со сдвигом эхо-сигнала для получения пары эхо-сигналов в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами. Пары эхо-сигналов получают с использованием биполярных градиентов магнитного поля считывания. Каждую пару эхо-сигналов получают с использованием соответствующей пары градиентов магнитного поля считывания, имеющих противоположные полярности. Соответствующие периоды сбора сигналов обозначены ACQ1 и ACQ2. Первый эхо-сигнал каждой пары эхо-сигналов получают в течение интервала ACQ1, в то время как второй эхо-сигнал каждой пары эхо-сигналов получают в течение интервала ACQ2. В показанном примере промежуток между перефокусирующими РЧ-импульсами является практически одинаковым в первой и второй визуализирующих последовательностях, в то время как градиентная напряженность магнитного поля считывания, а также принимаемый диапазон частот сигналов удваиваются во второй визуализирующей последовательности относительно первой визуализирующей последовательности для обеспечения возможности сдвига эхо-сигнала.
Две отдельные TSE-последовательности согласно диаграммам 31 и 32 применяют в режиме чередования согласно настоящему изобретению. Первую и вторую визуализирующие последовательности используют для получения одиночных эхо-сигналов и пар эхо-сигналов, соответственно. Привязка по времени биполярных градиентов считывания во второй визуализирующей последовательности (диаграмма 32) выбирают так, чтобы обеспечить сдвиг окон ACQ1, ACQ2 сбора эхо-сигналов таким образом, чтобы были обеспечены разные сдвиги фаз вкладов сигналов от протонов воды и протонов жира, на которых основано разделение этих вкладов сигналов по методу Диксона на конечном этапе реконструкции МР-изображения.
Например, три МР-изображения одиночного эхо-сигнала могут быть реконструированы на основании эхо-сигналов, генерируемых посредством первой и второй визуализирующих последовательностей согласно настоящему изобретению. Трехточечный способ по методу Диксона может быть затем непосредственно применен к трем МР-изображениям одиночного эхо-сигнала для разделения вкладов от протонов воды и жира. Разделение воды и жира может быть смоделировано следующим образом:
где S1'-S3' являются значениями вокселов в трех МР-изображениях одиночного эхо-сигнала (после коррекции эффектов макроскопических неоднородностей магнитного поля), W и F являются комплексными вкладами воды и жира, и с является комплексным сдвигом eiα фазы F относительно W при (положительном) сдвиге эхо-сигнала (предполагая для простоты однопиковую спектральную модель протонов жира). На этой основе вклады сигналов воды и жира могут быть оценены для каждого воксела посредством подхода с подбором по методу наименьших квадратов (см. Reeder и др., Magnetic Resonance in Medicine, 51, 35-45, 2004). Однако в предпочтительном варианте осуществления различие в отношении сигнал-шум в изображениях одиночного эхо-сигнала вместо этого учитывается посредством использования соответствующим образом взвешенной линейной оценки по методу наименьших квадратов, что обеспечивает лучшее отношение сигнал-шум.
В отношении компенсации потока, если первый момент градиента магнитного поля считывания у соответствующего последующего перефокусирующего импульса считается более критическим, чем первый момент градиента магнитного поля считывания во время одного из эхо-сигналов, то первый из упомянутых может быть уменьшен посредством сокращения и усиления лепестков исходной дефазировки и конечной повторной фазировки градиентов магнитного поля считывания (при сохранении их площади). Это показано в средней диаграмме фиг. 4. Левая диаграмма показывает лепестки градиентов магнитного поля считывания из диаграммы 32 фиг. 3. Первый момент может быть даже установлен равным нулю посредством усиления двух средних лепестков градиента магнитного поля считывания (что может влечь за собой сбор частичных эхо-сигналов), как показано в правой диаграмме на фиг. 4. Однако первый момент градиента магнитного поля считывания тогда больше не будет равен нулю во время второго эхо-сигнала.
Что касается устранения FID-артефактов в биполярном считывании двойного эхо-сигнала, градиент магнитного поля фазового кодирования («меточный градиент») может быть введен между двумя интервалами ACQ1, ACQ2 сбора данных так, чтобы разные линии k-пространства получались в каждом интервале между двумя последовательными перефокусирующими РЧ-импульсами. Другими словами, применение меточного градиента магнитного поля приводит к тому, что одна половина линий k-пространства получается с отрицательным сдвигом эхо-сигналов, а другая половина линий k-пространства получается с положительным сдвигом эхо-сигналов. Эти два подмножества линий k-пространства могут быть просто согласованы посредством использования их сопряженной комплексной симметрии. Возможная фаза в МР-изображении известна из эхо-сигналов, генерируемых с использованием первой визуализирующей последовательности, и может быть соответствующим образом учтена в этом процессе.
Кроме того, информация о FID-артефактах, получаемая посредством биполярного считывания двойного эхо-сигнала, может быть использована также для подавления FID-артефактов при униполярном считывании одиночного эхо-сигнала без увеличения времени сканирования. Например, первое разделение воды и жира может быть выполнено без такого подавления. Если оно указывает на то, что некоторый воксел по существу содержит либо воду, либо жир, то вклад FID в этот воксел, известный из биполярного считывания двойного эхо-сигнала, может быть промодулирован так, чтобы он отражал эволюцию фазы, на основании соответствующего сдвига эхо-сигналов для спинового эхо-сигнала, с использованием информации в отношении неоднородности главного магнитного поля, обеспечиваемой первым разделением воды и жира, и затем может быть вычтен из соответствующего сигнала в этом вокселе, полученного на основании униполярного считывания одиночного эхо-сигнала. Это может быть ограничено теми вокселями, для которых вклад FID превышает некоторый порог, для ограничения потенциальных потерь отношения сигнал-шум. Затем может быть выполнено второе разделение воды и жира. Также можно предложить выполнять разделение воды и жира только в отношении вклада FID, для точного предсказания вклада FID в сигнал, получаемый на основании униполярного считывания одиночного эхо-сигнала, даже для вокселов, содержащих смесь воды и жира.
Использование: для магнитно-резонансной томографии. Сущность изобретения заключается в том, что подвергают объект воздействию первой визуализирующей последовательности, содержащей серию перефокусирующих РЧ-импульсов, причем в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами генерируют одиночный эхо-сигнал, получают эхо-сигналы от объекта в первом принимаемом диапазоне частот с использованием униполярных градиентов магнитного поля считывания, подвергают объект воздействию второй визуализирующей последовательности, которая содержит серию перефокусирующих РЧ-импульсов, причем в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами генерируют пару эхо-сигналов, получают упомянутую пару эхо-сигналов от объекта во втором принимаемом диапазоне частот с использованием биполярных градиентов магнитного поля считывания, причем второй принимаемый диапазон частот является более высоким, чем первый принимаемый диапазон частот, и выполняют реконструкцию МР-изображения из полученных эхо-сигналов, при этом разделяют вклады сигналов от протонов воды и протонов жира. Технический результат: обеспечение возможности эффективного разделения воды и жира в комбинации с TSE-сбором данных. 4 н. и 10 з.п. ф-лы, 4 ил.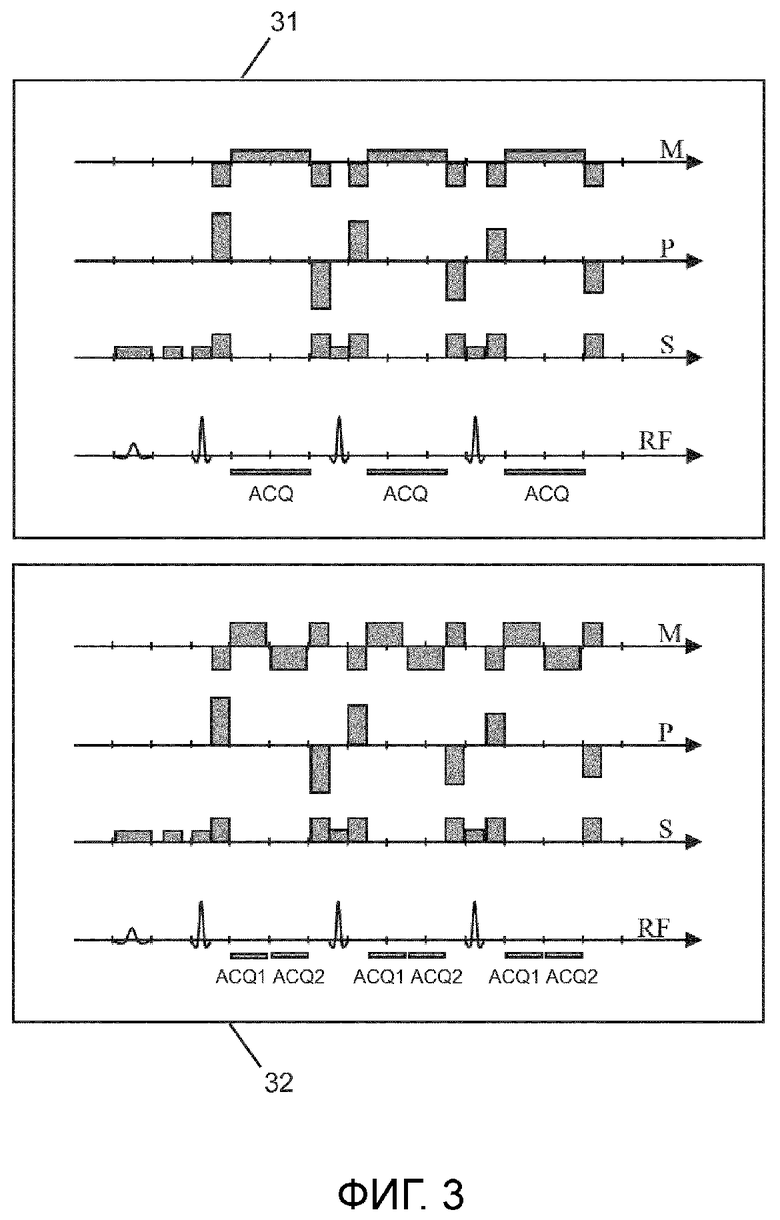
1. Способ магнитно-резонансной томографии (МРТ) объекта (10), размещенного в объеме для исследований МР-устройства (1), содержащий этапы:
- подвергания объекта (10) воздействию визуализирующей последовательности (32), которая содержит серию перефокусирующих РЧ-импульсов, причем в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами генерируют пару эхо-сигналов,
- получения упомянутой пары эхо-сигналов от объекта (10) с использованием биполярных градиентов магнитного поля считывания, и
- реконструкции МР-изображения из полученных эхо-сигналов, при этом разделяют вклады сигналов от протонов воды и протонов жира,
причем каждую пару эхо-сигналов объединяют в виртуальный эхо-сигнал, причем вклады сигналов от протонов воды и протонов жира разделяют посредством одноточечного метода Диксона с использованием виртуальных эхо-сигналов.
2. Способ по п. 1, причем каждый виртуальный эхо-сигнал вычисляют посредством коррекции фазы и усреднения эхо-сигналов каждой пары эхо-сигналов.
3. Способ по п. 1, причем между упомянутыми двумя эхо-сигналами каждой пары эхо-сигналов, генерируемых посредством визуализирующей последовательности, переключают градиент магнитного поля фазового кодирования.
4. Способ по п. 3, причем каждую пару эхо-сигналов получают дважды, причем каждый раз с использованием одного и того же фазового кодирования, но с противоположными фазами перефокусирующих РЧ-импульсов.
5. Способ магнитно-резонансной томографии (МРТ) объекта (10), размещенного в объеме для исследований МР-устройства (1), содержащий этапы:
- подвергания объекта (10) воздействию первой визуализирующей последовательности (31), содержащей серию перефокусирующих РЧ-импульсов, причем в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами генерируют один эхо-сигнал,
- получения эхо-сигналов от объекта (10) в первом принимаемом диапазоне частот с использованием униполярных градиентов магнитного поля считывания,
- подвергания объекта (10) воздействию второй визуализирующей последовательности (32), которая содержит серию перефокусирующих РЧ-импульсов, причем в каждом интервале времени между двумя последовательными перефокусирующими РЧ-импульсами генерируют пару эхо-сигналов,
- получения упомянутой пары эхо-сигналов от объекта (10) во втором принимаемом диапазоне частот с использованием биполярных градиентов магнитного поля считывания, причем второй принимаемый диапазон частот является более высоким, чем первый принимаемый диапазон частот, и
- реконструкции МР-изображения из полученных эхо-сигналов, при этом разделяют вклады сигналов от протонов воды и протонов жира.
6. Способ по п. 1, причем биполярные градиенты магнитного поля считывания являются более сильными, чем униполярные градиенты магнитного поля считывания.
7. Способ по п. 5 или 6, причем каждую пару эхо-сигналов объединяют в виртуальный эхо-сигнал, причем вклады сигналов от протонов воды и протонов жира разделяют посредством двухточечного метода Диксона с использованием эхо-сигналов, генерируемых посредством первой визуализирующей последовательности, и виртуальных эхо-сигналов.
8. Способ по п. 7, причем каждый виртуальный эхо-сигнал вычисляют посредством коррекции фазы и усреднения эхо-сигналов каждой пары эхо-сигналов.
9. Способ по любому из пп. 5 или 6, причем вклады сигналов от протонов воды и протонов жира разделяют посредством трехточечного метода Диксона с использованием эхо-сигналов, генерируемых посредством первой и второй визуализирующих последовательностей.
10. Способ по любому из пп. 5 или 6, причем между упомянутыми двумя эхо-сигналами каждой пары эхо-сигналов, генерируемых посредством второй визуализирующей последовательности, переключают градиент магнитного поля фазового кодирования.
11. Способ по п. 10, причем каждую пару эхо-сигналов получают дважды, причем каждый раз с использованием одного и того же фазового кодирования, но с противоположными фазами перефокусирующих РЧ-импульсов.
12. Способ по п. 7, причем посредством сравнения упомянутых пар эхо-сигналов, полученных с использованием одного и того же фазового кодирования, но с противоположными фазами перефокусирующих РЧ-импульсов, выявляют информацию о FID-артефактах, причем информацию о FID-артефактах применяют для коррекции FID-артефактов в полученных эхо-сигналах, генерируемых посредством первой визуализирующей последовательности.
13. МР-устройство, содержащее по меньшей мере одну главную магнитную катушку (2) для генерации однородного, статического магнитного поля В0 в пределах объема для исследований, некоторое число градиентных катушек (4, 5, 6) для генерации переключаемых градиентов магнитного поля в разных пространственных направлениях в пределах объема для исследований, по меньшей мере одну РЧ-катушку (9) для генерации РЧ-импульсов в пределах объема для исследований и/или для приема МР-сигналов от объекта (10), расположенного в объеме для исследований, блок (15) управления для управления временной последовательностью РЧ-импульсов и переключаемыми градиентами магнитного поля, и блок (17) реконструкции для реконструкции МР-изображений из принятых МР-сигналов, причем МР-устройство (1) выполнено с возможностью выполнения этапов способа по любому из пп. 1-12.
14. Машиночитаемый носитель, содержащий компьютерную программу, подлежащую выполнению на МР-устройстве, причем эта компьютерная программа содержит команды для исполнения способа по любому из пп. 1-12.
| US 2016033605 A1, 04.02.2016 | |||
| US 20110274331 A1, 10.11.2011 | |||
| US 20110267054 A1, 03.11.2011 | |||
| US 20080157767 A1, 03.07.2008 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ВЛАГИ В МУЧНОМ КОНДИТЕРСКОМ ИЗДЕЛИИ | 2004 |
|
RU2270995C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ЖИРА В МАРГАРИНЕ | 2006 |
|
RU2308709C1 |

