Область техники
Изобретение относится к транспортирующему устройству, захвату и способу оснащения и/или переоснащения транспортирующего устройства в соответствии с ограничительными частями независимых пунктов формулы изобретения.
Уровень техники
Подобные транспортирующие устройства, пригодные для транспортировки сыпучих материалов, например, риса или муки, в частности, по изогнутым трубам от впуска для сыпучего материала к выпуску для сыпучего материала, известны из уровня техники как трубчатые цепные транспортеры или тормозные дисковые транспортеры.
Патентный документ USA 4197938 описывает транспортирующее устройство для сыпучих материалов, содержащее дисковидные захваты. Захваты расположены на тросе, причем трос с захватами можно приводить в движение при помощи зубчатого колеса. Захваты предназначены, в частности, для транспортировки сыпучих материалов вдоль криволинейных участков трубы от впуска к выпуску.
Недостаток такого транспортирующего устройства для сыпучих материалов, известного из уровня техники, заключается в том, что, например, замена поврежденного во время работы захвата требует больших затрат, вследствие чего увеличиваются расходы на техническое обслуживание и уменьшается средняя пропускная способность сыпучего материала через транспортирующее устройство. Кроме того, при использовании в качестве тягового элемента троса с установленными на нем захватами коррекция длины, например, укорачивание или удлинение транспортирующего устройства, потребует больших затрат. Кроме того, известное из уровня техники транспортирующее устройство имеет недостаток, заключающийся в невозможности регулирования уровня наполнения транспортирующего устройства.
Патентный документ NL 1025855 описывает транспортирующее устройство с несколькими захватами, содержащими электропроводный и/или магнитный материал.
Раскрытие изобретения
Таким образом, задачей настоящего изобретения является устранение недостатков, присущих уровню техники, в частности, разработка транспортирующего устройства, захвата, подающего устройства и способа, которые позволят обеспечить эксплуатационную надежность транспортирующего устройства с низкими затратами на техническое обслуживание и с низкими затратами на эксплуатацию транспортирующего устройства. Еще одной задачей является разработка подающего устройства, обеспечивающего возможность регулирования уровня наполнения транспортирующего устройства. Дополнительной задачей настоящего изобретения является разработка способа оснащения и/или переоснащения уже установленных транспортирующих устройств, позволяющего упростить и удешевить техническое обслуживание этих устройств во время работы.
Эти задачи решены транспортирующим устройством, захватом, подающим устройством и способом с признаками, раскрываемыми в независимых пунктах формулы изобретения.
Описываемое изобретением транспортирующее устройство содержит канал транспортировки. В частности, канал транспортировки выполнен в виде транспортирующей трубы. В канале транспортировки расположен по меньшей мере один захват. В частности, в канале транспортировки расположено по меньшей мере два захвата. Транспортирующее устройство содержит по меньшей мере один привод, предназначенный для приведения в движение по меньшей мере одного захвата, предназначенного для транспортировки сыпучего материала вдоль оси канала транспортировки. По меньшей мере один захват по меньшей мере частично свободно расположен вдоль оси канала транспортировки.
Под «транспортирующим устройством» в смысле настоящей заявки понимают устройство для, в частности, непрерывной транспортировки сыпучих материалов. Под «непрерывной транспортировкой» сыпучего материала в смысле настоящей заявки понимают, в частности, такую транспортировку сыпучего материала, при которой поток сыпучего материала в канале транспортировки местами прерывается захватами.
Под «каналом транспортировки» в смысле настоящей заявки понимают канал, вдоль продольной оси которого можно транспортировать сыпучий материал. Например, канал транспортировки может быть выполнен в виде открытого лотка или пустотелого элемента круглого, треугольного, прямоугольного, квадратного или любого иного сечения. В частности, канал транспортировки выполнен в виде транспортирующей трубы круглого сечения (перпендикулярно продольной оси транспортирующей трубы). Кроме того, в частности, канал транспортировки выполнен в виде замкнутого контура.
Под «осью канала транспортировки» в смысле настоящей заявки понимают продольную ось канала транспортировки, вдоль которой транспортируют сыпучий материал при нормальных условиях эксплуатации.
Под «захватом» в смысле настоящей заявки понимают такой элемент, при помощи которого при нормальных условиях эксплуатации можно транспортировать сыпучий материал, по существу, параллельно продольной оси канала транспортировки за счет позиционирования захвата вдоль продольной оси. В частности, захват может быть расположен в пустотелом элементе, например, транспортирующей трубе, и может быть ориентирован вдоль оси пустотелого элемента с целью транспортировки сыпучего материала вдоль оси пустотелого элемента.
Под «сыпучим материалом» в смысле настоящей заявки понимают зерновой, порошкообразный или кусковой материал, присутствующий в свободно сыпучей, в частности, текучей форме. В частности, под сыпучим материалом понимают рис, муку, зерно, текучие порошкообразные вещества и любые их сочетания.
Под «свободным расположением захвата по меньшей мере частично вдоль оси канала транспортировки» в смысле настоящей заявки понимают захват, не имеющий непосредственного соединения с приводом на приводном участке; такой захват перемещается на приводном участке вдоль оси канала транспортировки только под действием расположенного по соседству с ним вдоль оси канала транспортировки захвата и/или перемещаемого им сыпучего материала; например, на приводном участке сила, действующая на захват, ориентирована, по существу, параллельно оси канала транспортировки, в результате чего захват и соприкасающийся с ним сыпучий материал расположены, по существу, параллельно оси канала транспортировки, причем захват и/или сыпучий материал перемещаются вне приводного участка транспортирующего устройства вдоль оси канала транспортировки.
Под обозначением «А и/или В» в смысле настоящей заявки понимают следующие возможные комбинации: А; В; А и В; А и не В; В и не А.
Конструкция транспортирующего устройства по меньшей мере с одним свободно расположенным в канале транспортировки захватом выгодна простотой замены, например, поврежденного захвата, так как захват свободно расположен в канале транспортировки. Таким образом, снижаются затраты на техническое обслуживание и, тем самым, повышается экономичность эксплуатации транспортирующего устройства. Кроме того, выгодна возможность адаптации к каналам транспортировки различной длины, выполняемая путем извлечения или добавления захвата.
В частности, канал транспортировки по меньшей мере в одной боковой проекции имеет S-образную форму. Преимущество этого варианта заключается в компактном расположении транспортирующего устройства, в частности, только на одном этаже; на уровне техники для этого обычно требуется два или три этажа, на которых размещают транспортирующее устройство.
Канал транспортировки, в частности, транспортирующая труба может содержать сталь или состоять из нее по меньшей мере на приводном участке.
Предпочтительно, канал транспортировки выполнен в виде устройства для направления захвата вдоль оси канала транспортировки.
Под «устройством для направления» в смысле настоящей заявки понимают устройство для ограничения движения захвата, по существу, перпендикулярное оси канала транспортировки.
Вариант исполнения канала транспортировки в виде устройства для направления захвата выгоден тем, что захват может выполнять лишь небольшое перемещение перпендикулярно оси канала транспортировки, в результате чего можно свести к минимуму повреждения захвата при эксплуатации.
Вариант исполнения канала транспортировки в виде устройства для направления можно реализовать, например, за счет того, что среднее поперечное сечение канала транспортировки вдоль оси канала транспортировки будет иметь форму, по существу, подобную среднему поперечному сечению захвата вдоль оси канала транспортировки, благодаря чему захват еще можно вставить в канал транспортировки с небольшим зазором в боковом направлении к оси канала транспортировки.
В особенно предпочтительном варианте привод выполнен таким образом, чтобы по меньшей мере местами привод мог передавать усилие непосредственно на захват, по существу, параллельно оси канала транспортировки. Для этого захват может содержать по меньшей мере одну приводную поверхность, на которую может воздействовать указанное усилие. Предпочтительно, приводная поверхность эластична и может состоять, например, из пластмассы или резины, или может быть покрыта пластмассой или резиной. Таким образом, контакт между приводом и захватом может происходить не только в некоторой точке, но и вдоль линии или даже в плоскости. Кроме того, приводная поверхность может содержать сталь или состоять из нее.
Под формулировкой «мог передавать усилие непосредственно» в смысле настоящей заявки понимают прямое приложение приводом усилия к соответствующему захвату, а не передаваемое посредством дополнительного захвата и/или сыпучего материала, расположенного между приводом и захватом.
Такая конструкция привода выгодна тем, что позволяет надежно передавать усилие на захват даже при свободном расположении захвата.
В наиболее предпочтительном варианте привод входит по меньшей мере в один приводной участок канала транспортировки с целью приложения усилия, ориентированного, по существу, параллельно оси канала транспортировки, к захвату, расположенному на приводном участке.
В этом варианте, выгодным образом, привод необходимо установить только в одной части устройства, что облегчает техническое обслуживание транспортирующего устройства и упрощает конструктивное исполнение транспортирующего устройства.
В частности, общая длина захватов, расположенных в канале транспортировки, меньше длины оси канала транспортировки. Предпочтительно, общая длина захватов превышает длину оси канала транспортировки за вычетом длины по меньшей мере одной приводной части.
Этот вариант выгоден надежной реализацией привода захвата в канале транспортировки.
Под «общей длиной» захватов понимают наибольшее эффективное растяжение захвата вдоль оси канала транспортировки, умноженное на количество захватов, расположенных в канале транспортировки. Если исполнение захватов различается, то под «общей длиной» захватов понимают сумму наибольших эффективных растяжений захвата вдоль оси канала транспортировки.
Предпочтительно, привод выполнен таким образом, чтобы усилие можно было передавать, по существу, на периферийную область захвата, обращенную к внутренней стенке канала транспортировки.
Под формулировкой «усилие можно было передавать, по существу, на периферийную область захвата, обращенную к внутренней стенке канала транспортировки» в смысле настоящей заявки понимают контакт привода с захватом посредством приводного устройства, причем приводное устройство непосредственно соприкасается с периферийной областью захвата.
В этом варианте, выгодным образом, привод для реализации приводного действия должен входить в канал транспортировки только в области внутренней стенки, что позволяет свести к минимуму столкновения привода с другими частями захвата, а также сжатие сыпучего материала.
В особенно предпочтительном варианте привод можно выбрать или привод выбран из списка, содержащего следующие типы приводов или их произвольные сочетания: цепной привод, ременный привод, кривошипный механизм, зубчатая передача, червячная передача, магнитная передача. Кривошипный механизм может быть выполнен, например, в виде шарнирного четырехзвенника, в частности, прямой передачи.
Подобные приводы известны специалистам в данной области техники. Выгодным образом, можно подобрать наиболее подходящий привод в соответствии с предъявляемыми требованиями, а также конструктивными особенностями.
В частности, применяют кривошипный механизм, который оказался наиболее удобным в эксплуатации.
В частности, при использовании магнитного привода необходимо соответствующим образом выбрать материал для захвата, чтобы переменное магнитное поле, создаваемое магнитным приводом, могло привести захват в движение.
В первом предпочтительном варианте исполнения привод содержит по меньшей мере один ведущий палец, с помощью которого по меньшей мере местами можно передавать усилие, по существу, параллельно оси канала транспортировки непосредственно на захват, в частности, на приводную поверхность захвата. Предпочтительно, ведущий палец по меньшей мере во время передачи усилия ориентирован в вертикальном направлении.
Выгодным образом, в этом первом варианте привод выполнен в виде цепного привода и содержит по меньшей мере одну пару приводных цепей, причем каждая из двух противоположных оконечностей ведущего пальца закреплена на соответствующей приводной цепи этой пары. В случае вертикально ориентированного ведущего пальца привод содержит по меньшей мере одну нижнюю приводную цепь и по меньшей мере одну верхнюю приводную цепь.
Привод может содержать одну или несколько пар приводных цепей с соответствующими ведущими пальцами. В некоторых вариантах исполнения первого варианта ведущие пальцы расположены сбоку от канала транспортировки. Предпочтительно, ведущие пальцы первой пары приводных цепей расположены на первой стороне канала транспортировки, а ведущие пальцы второй пары приводных цепей расположены на второй стороне канала транспортировки, противоположной первой стороне. Таким образом, можно предотвратить заклинивание захватов во время передачи на них усилия от ведущих пальцев.
Также предпочтителен вариант, в котором расстояние между двумя соседними ведущими пальцами, по существу, идентично растяжению захватов вдоль оси канала транспортировки. Это означает, что расстояние между двумя соседними ведущими пальцами по меньшей мере равно растяжению захватов вдоль оси канала транспортировки и может превышать это растяжение не более чем в 1,5 раза, предпочтительно, не более чем в 1,25 раза, еще предпочтительнее, не более чем в 1,1 раза. Тем самым можно гарантировать, что захваты при приведении в движение будут по меньшей мере почти соприкасаться друг с другом, а расстояние между ними будет минимально возможным. Предпочтительно, расстояние между двумя соседними ведущими пальцами превышает растяжение захватов вдоль оси канала транспортировки; в частности, отношение между этими величинами может составлять по меньшей мере 1,01. Таким образом, можно обеспечить определенный зазор, позволяющий компенсировать производственные допуски или допуски на износ.
Во втором предпочтительном варианте привод выполнен в виде цепного или ременного привода и содержит по меньшей мере одну приводную цепь, содержащую по меньшей мере один кулачок. При помощи этого кулачка можно, по меньшей мере, местами передавать усилие, по существу, параллельно оси канала транспортировки непосредственно на захват, в частности на приводную поверхность захвата.
Во втором варианте приводная цепь также может быть расположена сбоку от канала транспортировки. Может быть предусмотрена одна или несколько приводных цепей. Например, первая приводная цепь с кулачками может быть расположена на первой стороне канала транспортировки, а вторая приводная цепь с кулачками может быть расположены на второй стороне канала транспортировки, противоположной первой стороне. Такая конструкция также позволяет предотвратить заклинивание захватов во время передачи на них усилия от ведущих пальцев.
Также предпочтителен вариант, в котором расстояние между двумя соседними кулачками захватов, по существу, равно растяжению захвата вдоль оси канала транспортировки. Это означает, что расстояние между двумя соседними кулачками захватов по меньшей мере равно растяжению захватов вдоль оси канала транспортировки и может превышать это растяжение не более чем в 1,5 раза, предпочтительно, не более чем в 1,25 раза, еще предпочтительнее, не более чем в 1,1 раза. Тем самым можно гарантировать, что захваты при приведении в движение будут по меньшей мере почти соприкасаться друг с другом, а расстояние между ними будет минимально возможным. Предпочтительно, расстояние между двумя соседними кулачками захватов превышает растяжение захватов вдоль оси канала транспортировки; в частности, отношение между этими величинами может составлять по меньшей мере 1,01. Таким образом, можно обеспечить определенный зазор, позволяющий компенсировать производственные допуски или допуски на износ.
В третьем предпочтительном варианте исполнения привод выполнен в виде червячной передачи и содержит по меньшей мере один вращающийся приводной шнек, посредством вращения которого можно передавать усилие по меньшей мере местами, по существу, параллельно оси канала транспортировки непосредственно на захват, в частности, на приводную поверхность захвата. При этом особенно предпочтителен вариант, в котором ось вращения приводного шнека, по существу, параллельна оси канала транспортировки.
В этом третьем варианте может быть предусмотрен один или несколько вращающихся приводных шнеков. Например, первый приводной шнек может быть расположен на первой стороне канала транспортировки, а второй транспортирующий шнек может быть расположен на второй стороне канала транспортировки, противоположной первой стороне.
Также предпочтителен вариант, в котором растяжение захвата вдоль оси канала транспортировки, по существу, является целым кратным шага приводного шнека. Это означает, что отношение растяжения захвата вдоль оси канала транспортировки и шага приводного шнека не более чем на 0,4, предпочтительно не более чем на 0,2, и особенно предпочтительно не более чем на 0,1 меньше целого числа, причем это целое число может быть равно, например, 1, 2, 3, 4, 5 или 6. Например, это отношение может составлять от 3,6 до 4, предпочтительно от 3,8 до 4 и особенно предпочтительно от 3,9 до 4. Тем самым можно гарантировать, что захваты при приведении в движение будут по меньшей мере почти соприкасаться друг с другом, а расстояние между ними будет минимально возможным. Также предпочтителен вариант, в котором указанное отношение по меньшей мере на 0,01 меньше указанного целого числа; таким образом, можно обеспечить определенный зазор, позволяющий компенсировать производственные допуски или допуски на износ.
В случае наличия нескольких пар приводных цепей и/или приводных цепей и/или приводных шнеков они, предпочтительно, синхронизированы друг с другом. Это может быть реализовано, например, при помощи известного зубчатого механизма передачи, посредством которого можно передавать приводное усилие двигателя на несколько или на все приводные цепи и/или приводные шнеки. Такая синхронизация, в частности, позволяет гарантировать, что ведущие пальцы, описанные выше по меньшей мере во время передачи усилия на захват будут ориентированы в вертикальном направлении, и что несколько ведущих пальцев, кулачков захватов или приводных шнеков будут двигаться с одинаковой скоростью.
Предпочтительно, длина приводного участка в направлении оси канала транспортировки по меньшей мере в два раза, предпочтительно по меньшей мере в три раза превышает длину захвата. Благодаря этому, по меньшей мере один захват в любой момент времени будет полностью находиться на приводном участке.
На внутренней стенке канала транспортировки может быть предусмотрен по меньшей мере один направляющий элемент, а захват может содержать соответствующий ответный направляющий элемент, при помощи которого захват можно направлять вдоль направляющего элемента. Это позволяет предотвратить перекос или заклинивание захвата. Направляющий элемент может быть выполнен, например, в виде вертикальной направляющей пластины. Предпочтительно, на внутренней стенке канала транспортировки расположено по меньшей мере две, предпочтительно ровно две вертикальные направляющие пластины, расположенные напротив друг друга.
По желанию, центровку захватов можно осуществлять при помощи описанных выше ведущих пальцев. Приводная цепь, упомянутая выше, может проходить сбоку и, тем самым, поглощать боковые усилия.
В особенно предпочтительном варианте передача усилия между двумя захватами, расположенными по соседству в канале транспортировки параллельно оси канала транспортировки, может быть реализована путем непосредственного контакта между захватами и/или посредством сыпучего материала, находящегося в канале транспортировки между захватами.
В этом варианте, выгодным образом, достаточно расположить привод на приводном участке, что удешевляет транспортирующее устройство и упрощает техническое обслуживание.
Следующий аспект настоящего изобретения относится к захвату для транспортировки сыпучего материала в транспортирующем устройстве, описанном выше. Захват содержит поверхность и установочное устройство, предназначенное для по меньшей мере частичной ориентации средней нормали к поверхности захвата, по существу, параллельно оси канала транспортировки.
Под «поверхностью» захвата в смысле настоящей заявки понимают поверхность, способствующую, по существу, продвижению сыпучего материала в направлении транспортировки при надлежащем использовании захвата.
Под «установочным устройством» понимают устройство, при помощи которого поверхность захвата в канале транспортировки может быть ориентирована таким образом, чтобы захват при надлежащем использовании был пригоден для перемещения сыпучего материала. Например, это может быть реализовано при помощи исполнения в виде цилиндра соответствующего размера, буртика, проходящего по периметру захвата параллельно оси транспортировки или разнесенных дисков, соединенных с распоркой.
Под «средней нормалью к поверхности» захвата в смысле настоящей заявки понимают среднее значение нормали к рабочей поверхности захвата, которая в нормальных условиях эксплуатации может соприкасаться с сыпучим материалом.
Ориентация поверхности захвата при помощи установочного устройства, по существу, параллельно оси канала транспортировки выгодна тем, что поверхность захвата во время работы занимает нужное положение и, таким образом, обеспечивает эффективную и экономичную работу. Поскольку установочное устройство расположено на самом захвате, его легко заменить, например, в случае повреждения захвата, так как захват может быть свободно расположен в канале транспортировки, что упрощает техническое обслуживание.
Предпочтительно, при выравнивании средней нормали к поверхности захвата, по существу, параллельно оси канала транспортировки поверхность захвата перекрывает среднее поперечное сечение канала транспортировки менее чем на 100%. Предпочтительно, захват перекрывает среднее поперечное сечение канала транспортировки в диапазоне от 50 до 99,9%, особенно предпочтительно от 80 до 99,9%. В частности, перекрытие может составлять от 85 до 99,9%, возможно от 90 до 99,8%, возможно от 92 до 97%; в частности, степень перекрытия выбирают в зависимости от транспортируемого сыпучего материала.
Под «средним поперечным сечением канала транспортировки» в смысле настоящей заявки понимают среднее значение площади поперечного сечения, взятой перпендикулярной оси канала транспортировки, через которое при нормальных условиях эксплуатации транспортируют сыпучий материал. Это позволяет, выгодным образом, эффективно транспортировать сыпучие материалы вдоль канала транспортировки, повышая экономическую эффективность эксплуатации.
В особенно предпочтительном варианте установочное устройство содержит по меньшей мере один первый поверхностный элемент и второй поверхностный элемент, расположенные, по существу, на некотором расстоянии друг от друга параллельно оси канала транспортировки и кинематически соединенные друг с другом, причем средняя нормаль к поверхности этих элементов, по существу, параллельна оси канала транспортировки.
Это позволяет упростить конструктивное исполнение захвата. Кроме того, такое исполнение имеет преимущества, перечисленные выше в отношении установочного устройства.
Например, захват может содержать два круглых диска, расположенных на некотором расстоянии друг от друга параллельно оси канала транспортировки и соединенных друг с другом перемычкой, которая может быть ориентирована, по существу, параллельно оси канала транспортировки.
Приводная поверхность захвата может быть расположена на одном из двух поверхностных элементов. В частности, поверхность захвата может быть образована первой стороной одного из двух круглых дисков, а приводная поверхность может быть образована второй стороной этого диска, противоположной первой стороне.
В особенно предпочтительном варианте поверхности, ограниченные периметром первого поверхностного элемента и второго поверхностного элемента, выполнены, по существу, подобными, что реализовано путем проецирования параллельно средней нормали к поверхности.
Под словами «поверхности, ограниченные периметром» первого поверхностного элемента и второго поверхностного элемента в смысле настоящей заявки понимают положение, в котором внешние оболочки первого поверхностного элемента и второго поверхностного элемента при помещении в канал транспортировки могут быть отображены, по существу, подобно друг другу; например, расположенные параллельно друг другу поверхности двух расположенных параллельно друг другу цельных круглых дисков одинакового диаметра, по существу, подобны друг другу; кроме того, круглый цельный диск без отверстий, помещенный в транспортирующую трубу круглого сечения, по существу, подобен поверхностному элементу, содержащему радиально расположенные перемычки с полостями, сформированными между перемычками, если радиус перемычек совпадает с радиусом круглого цельного диска.
Вариант, в котором первый поверхностный элемент и второй поверхностный элемент, по существу, подобны друг другу, выгоден возможностью упростить конструкцию захвата, что, в свою очередь, приводит к упрощению технического обслуживания и снижению стоимости захвата.
Предпочтительно, первый поверхностный элемент захвата, обращенный в направлении транспортировки сыпучего материала, проницаем для сыпучего материала. В частности, второй поверхностный элемент содержит поверхность захвата. В частности, второй поверхностный элемент расположен на стороне захвата, противоположной направлению подачи.
Под «направлением подачи» в смысле настоящей заявки понимают направление, в котором сыпучий материал в среднем транспортируют вдоль канала транспортировки в транспортирующем устройстве, в частности на участке вдоль канала транспортировки.
Под термином «проницаемый» в отношении поверхностного элемента в смысле настоящей заявки понимают проницаемость для транспортируемого сыпучего материала; например, проницаемость может быть реализована путем выполнения в первом поверхностном элементе достаточно больших отверстий, предназначенных для сыпучего материала.
Проницаемость первого поверхностного элемента, расположенного на некотором расстоянии от второго поверхностного элемента, по существу, параллельно оси канала транспортировки, выгодна тем, что позволяет использовать пространство между поверхностными элементами для транспортировки сыпучих материалов, в результате чего увеличивается пропускная способность и повышается экономическая эффективность.
В особенно предпочтительном варианте на стороне захвата, обращенной в направлении транспортировки и/или в сторону, противоположную направлению транспортировки, предусмотрена распорка. В частности, распорка представляет собой, по существу, выступ, параллельный оси канала транспортировки. В частности, распорка имеет форму шара или купола на оконечности, обращенной в сторону от захвата.
Под «формой шара или купола» в смысле настоящей заявки понимают наличие шара или купола на оконечности распорки, удаленной от захвата. Под куполом понимают плоский срез шара.
Наличие по меньшей мере одной распорки на захвате выгодно тем, что позволяет конструктивно простыми средствами реализовать минимальное расстояние для эффективной транспортировки сыпучих материалов в канале транспортировки, в результате чего снижаются затраты на техническое обслуживание и повышается экономичность и эффективность эксплуатации. Шарообразная или куполообразная распорка, выгодным образом, будет надежно работать даже в изогнутых каналах транспортировки и позволит свести к минимуму возникновение больших точечных нагрузок, в результате чего будет снижен износ и, тем самым, уменьшен объем технического обслуживания.
В особенно предпочтительном варианте на стороне захвата, обращенной в направлении транспортировки и/или в сторону, противоположную направлению транспортировки, предусмотрена выемка, выполненная таким образом, чтобы распорка могла входить в выемку. В частности, выемка имеет форму воронки и, предпочтительно, по меньшей мере, частично сферическую форму или по меньшей мере частично параболическую форму.
Благодаря этому распорка сможет гарантированно входить в выемку даже на изогнутых участках канала транспортировки, в результате чего повышается надежность эксплуатации, снижается износ и сокращается объем технического обслуживания.
Следующий аспект настоящего изобретения относится к подающему устройству для транспортировки сыпучего материала на впуск транспортирующего устройства, содержащего канал транспортировки с внутренней стенкой. В частности, подающее устройство используют с описанным выше транспортирующим устройством и, дополнительно, с описанным выше захватом. Сыпучий материал можно подавать в направлении транспортировки, по существу, под действием силы тяжести. В частности, подающее устройство расположено на, по существу, горизонтальном участке транспортирующего устройства. Впуск перекрывает внутреннюю стенку в угловом диапазоне от >0° до <180° и/или от <0° до >-180° по отношению к вектору силы тяжести. Предпочтительно, угловой диапазон составляет от >20° до <160° и/или от <-20° до >-160°. В особенно предпочтительном варианте угловой диапазон составляет от >45° до <150° и/или от <-45° до >-150°.
Под «углом по отношению к вектору силы тяжести» в смысле настоящей заявки понимают положение, в котором вектор силы тяжести приравнен к 0°, положительный угол измеряют по часовой стрелке относительно вектора силы тяжести, а отрицательный угол - против часовой стрелки относительно вектора силы тяжести.
Под «на, по существу, горизонтальном участке» в смысле настоящей заявки понимают участок, ориентированный, по существу, перпендикулярно вектору силы тяжести.
Под «угловым диапазоном, перекрывающим внутреннюю стенку» в смысле настоящей заявки понимают перекрытие впуском транспортирующего устройства угла раскрытия, измеренного от оси канала транспортировки, то есть от центра канала транспортировки. Угловой диапазон следует считать средним угловым диапазоном.
Например, впуск будет расположен сбоку, если впуск находится, по существу, на горизонтальном участке транспортирующего устройства.
Расположение впуска в указанном угловом диапазоне выгодно тем, что оно позволяет регулировать уровень или степень заполнения канала транспортировки в соответствии с предъявляемыми требованиями. Выгодным образом, угловой диапазон можно выбирать в зависимости от используемого сыпучего материала.
Например, угловой диапазон может быть фиксированным; это выгодно тем, что угловой диапазон можно зафиксировать, например, на оптимальном значении для транспортируемого сыпучего материала, что повышает надежность работы транспортирующего устройства.
Предпочтительно, угловой диапазон можно регулировать, в частности, с помощью заслонки.
Например, заслонку можно выполнить в виде поворотной заслонки и/или поворотной втулки в канале транспортировки и/или на подающем устройстве.
Возможность регулировки углового диапазона выгодна тем, что, в зависимости от требований к транспортировке сыпучего материала и от транспортируемого сыпучего материала можно отрегулировать угловой диапазон с целью регулирования степени заполнения канала транспортировки.
В особенно предпочтительном варианте подающее устройство содержит отклоняющую область для транспортировки сыпучего материала к впуску.
Этот вариант выгоден тем, что сыпучий материал, находящийся, например, на более высоком уровне в резервуаре для хранения, можно передавать с помощью отклоняющей области в канал транспортировки, причем отклоняющая область позволяет настраивать скорость транспортировки или подачи сыпучего материала в канал транспортировки.
Под «отклоняющей областью» в смысле настоящей заявки понимают область, в которой происходит отклонение сыпучего материала от направления транспортировки, по существу, параллельного направлению силы тяжести.
В особенно предпочтительном варианте отклоняющая область выполнена в виде отклоняющей поверхности и расположена под углом от 30 до 70° к направлению силы тяжести. Предпочтительно угол отклонения составляет от 40 до 60°, более предпочтительно от 45 до 55°.
В альтернативном варианте угол отклонения может составлять от -30 до -70°, предпочтительно от -40 до -60°, более предпочтительно от -45 до -55°.
Расположение отклоняющей поверхности в заявленном угловом диапазоне выгодно тем, что, в зависимости от транспортируемого сыпучего материала и требуемой скорости потока, можно регулировать количество подаваемого сыпучего материала.
В частности, можно регулировать угол отклонения, что, выгодным образом, позволяет регулировать угол отклонения в зависимости от предъявляемых требований.
Еще один аспект настоящего изобретения относится к способу транспортировки сыпучего материала при помощи описанного выше транспортирующего устройства. Транспортирующее устройство дополнительно содержит описанный выше захват. Кроме того, устройство дополнительно содержит описанное выше подающее устройство. Способ содержит этап транспортировки сыпучего материала от впуска к выпуску.
Способ имеет описанные выше преимущества.
Еще один аспект предлагаемого изобретения относится к способу оснащения и/или переоснащения транспортирующего устройства, предназначенного для транспортировки сыпучего материала. Способ содержит этап монтажа по меньшей мере одного захвата с целью изготовления описанного выше транспортирующего устройства. В частности, захват устанавливают описанным выше образом. Кроме того, способ содержит дополнительный этап монтажа подающего устройства, описанного выше.
Этот вариант выгоден тем, что уже установленные транспортирующие устройства можно переоснастить и/или преобразовать в описываемое изобретением транспортирующее устройство. Эта операция экономична, так как не требует монтажа полностью нового транспортирующего устройства.
Краткое описание чертежей
Прочие признаки и преимущества изобретения детально рассматриваются ниже на основании вариантов исполнения, не имеющих ограничительного характера. На фигурах изображено:
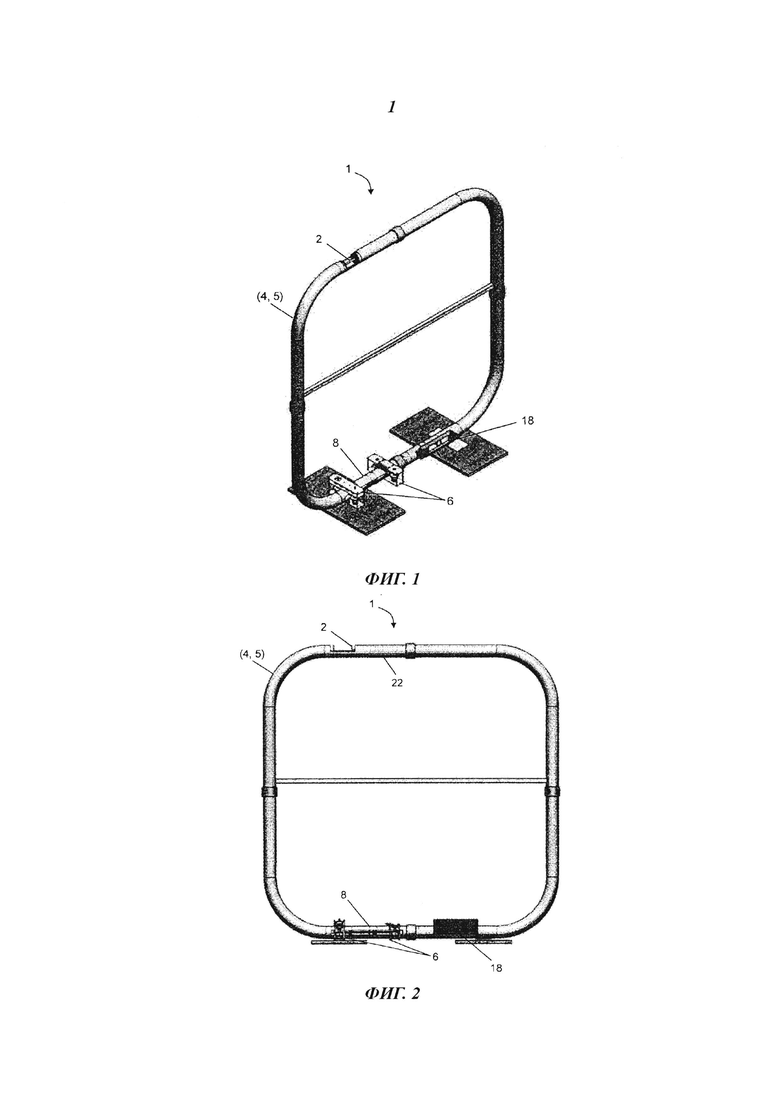
Фигура 1: вид описываемого изобретением транспортирующего устройства в аксонометрии.
Фигура 2: вид спереди на описываемое изобретением транспортирующее устройство согласно фигуре 1.
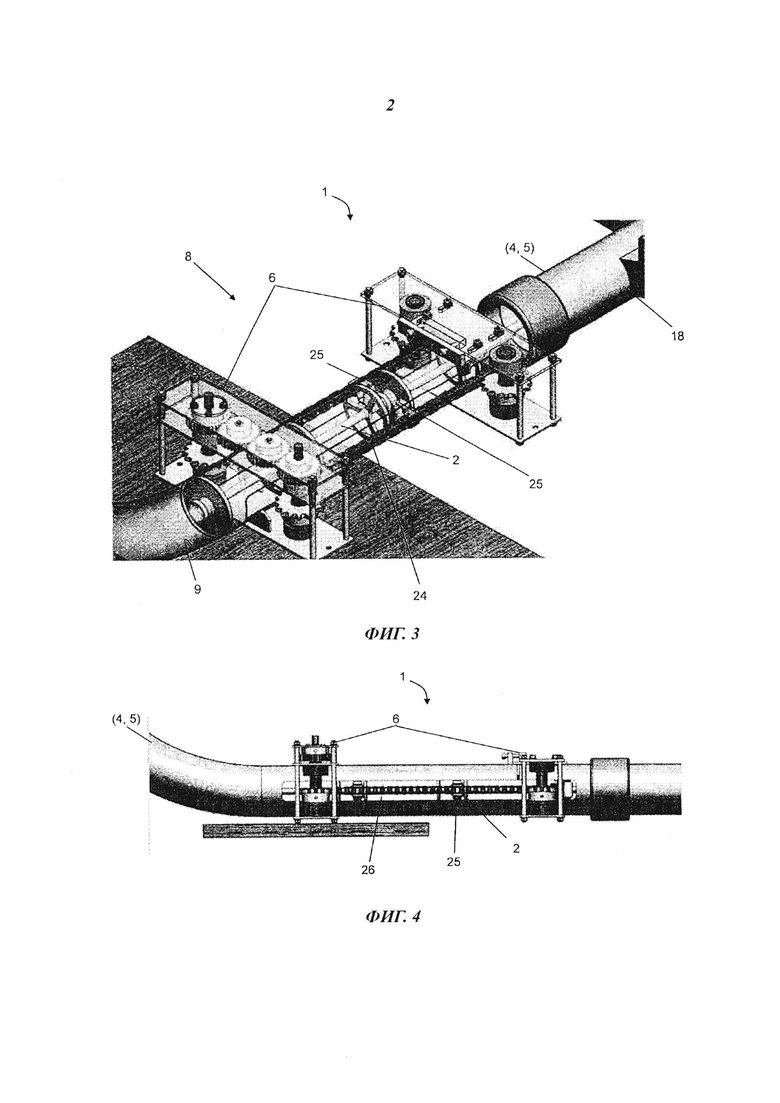
Фигура 3: увеличенный вид приводного участка описываемого изобретением транспортирующего устройства согласно фигуре 1.
Фигура 4: вид спереди фрагмента описываемого изобретением транспортирующего устройства согласно фигуре 1, содержащего приводной участок.
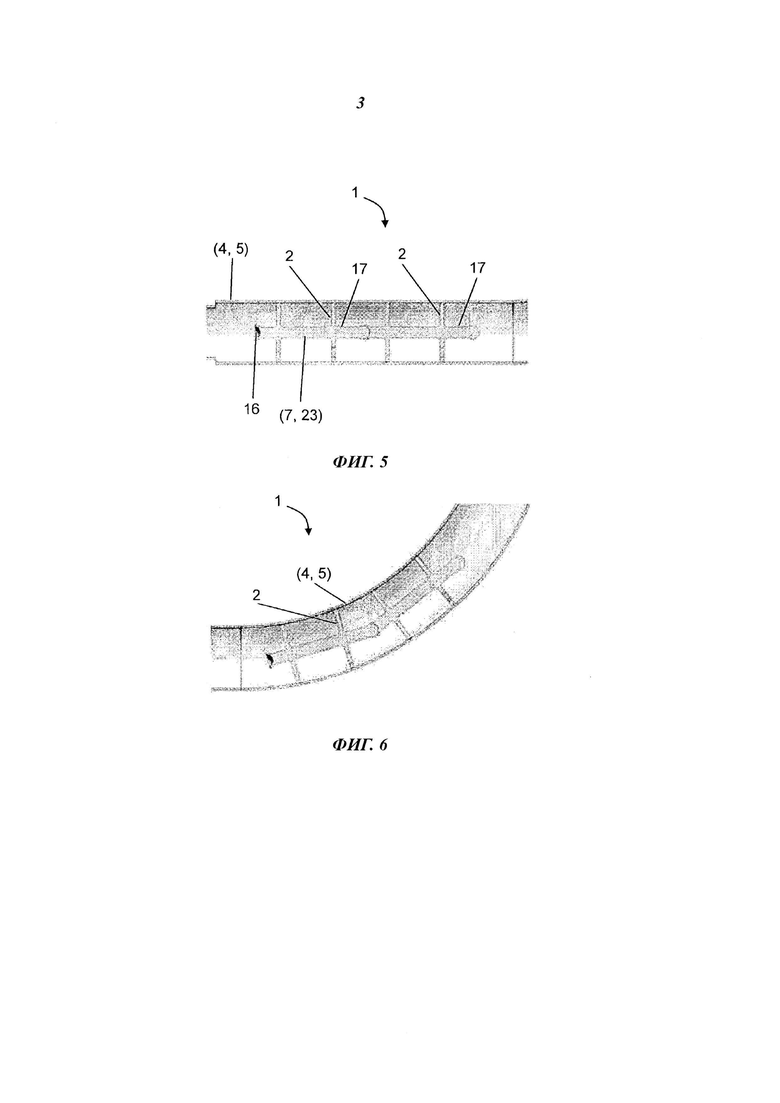
Фигура 5: фрагмент описываемого изобретением транспортирующего устройства с двумя захватами в прямой транспортирующей трубе.
Фигура 6: фрагмент описываемого изобретением транспортирующего устройства с двумя захватами в изогнутом канале транспортировки.
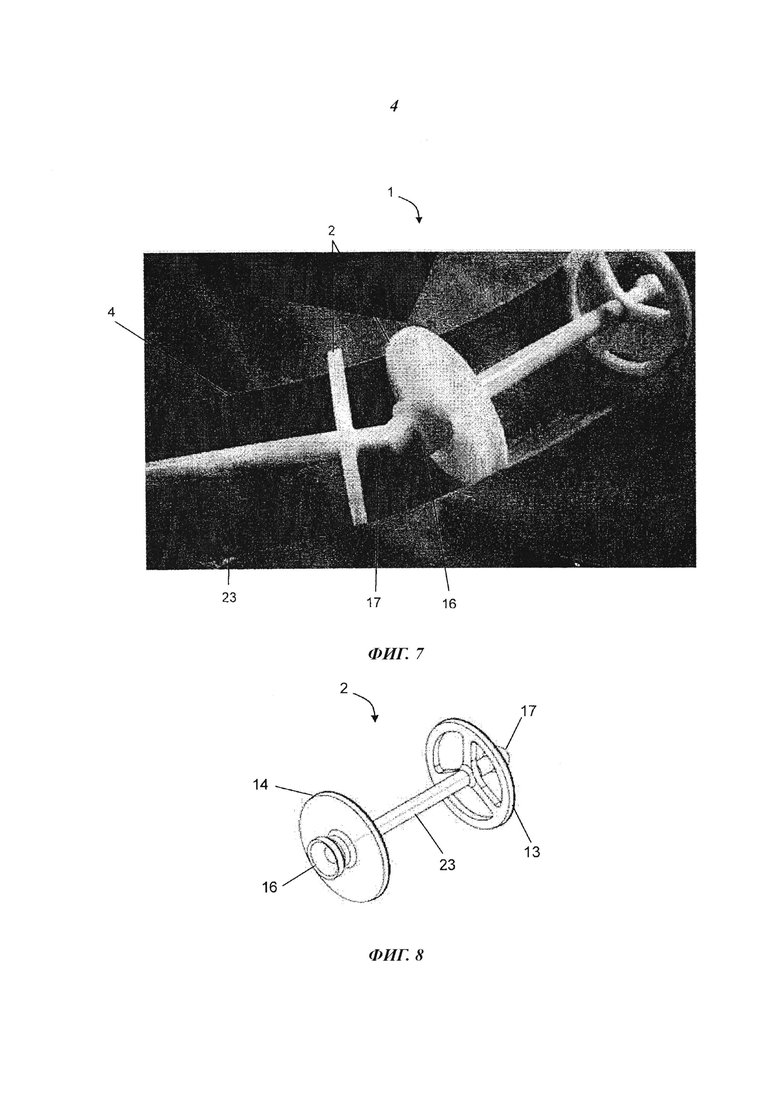
Фигура 7: фотография двух описываемых изобретением захватов, состоящих в кинематической связи, в транспортирующем лотке.
Фигура 8: вид описываемого изобретением захвата в аксонометрии.
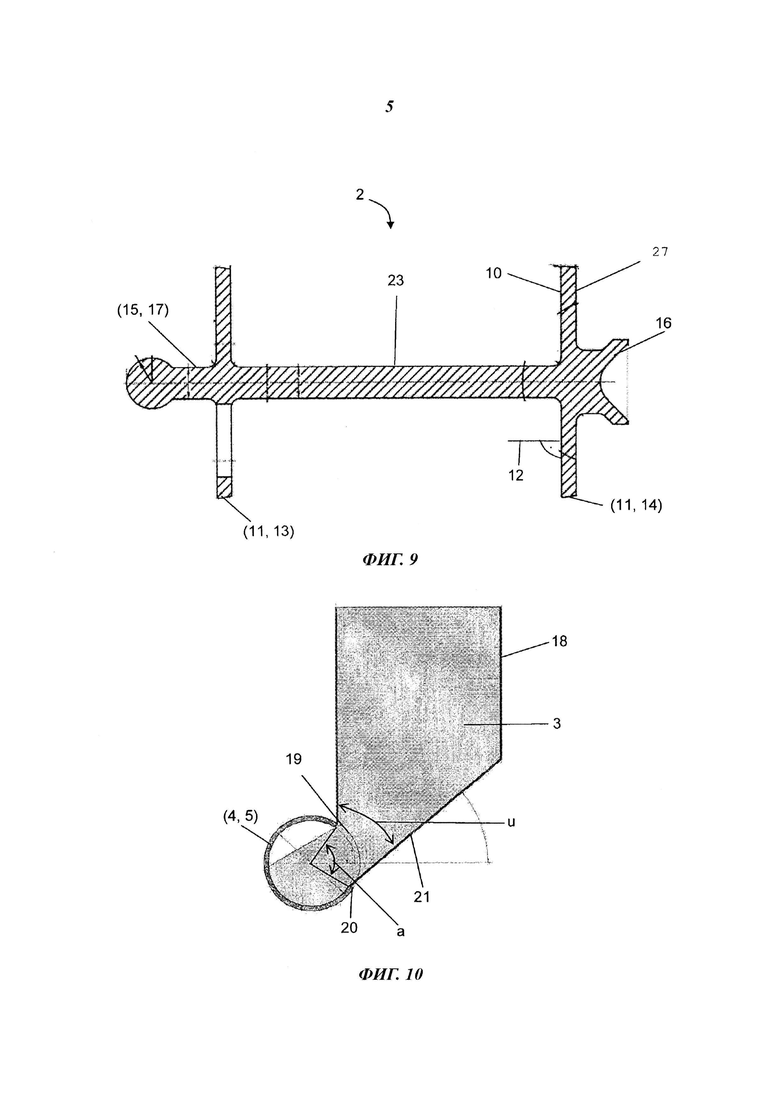
Фигура 9: вид сбоку захвата, показанного на фигуре 8.
Фигура 10: схематичное изображение описываемого изобретением подающего устройства с каналом транспортировки.
Фигура 11: вид в аксонометрии части описываемого изобретением транспортирующего устройства с захватами и сыпучим материалом в альтернативном варианте.
Фигура 12: схематичное изображение транспортирующего устройства с S-образной транспортирующей трубой.
Фигура 13а: вид в аксонометрии другого варианта исполнения описываемого изобретением транспортирующего устройства с ведущими пальцами, расположенными на паре приводных цепей.
Фигура 13b: вид сверху на транспортирующее устройство, показанное на фигуре 13а.
Фигура 14а: вид в аксонометрии другого варианта исполнения описываемого изобретением транспортирующего устройства с ведущими пальцами, расположенными на двух парах приводных цепей.
Фигура 14b: вид сверху на транспортирующее устройство, показанное на фигуре 14а.
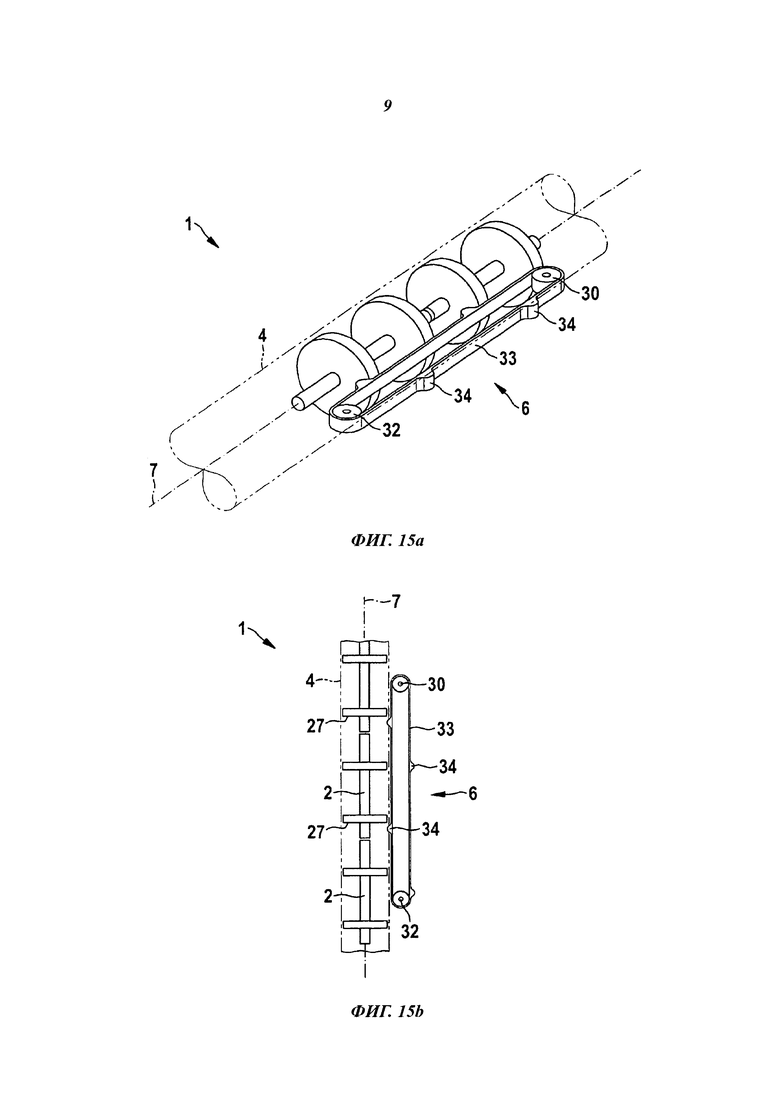
Фигура 15а: вид в аксонометрии другого варианта исполнения описываемого изобретением транспортирующего устройства с кулачками захватов, расположенными на приводной цепи.
Фигура 15b: вид сверху на транспортирующее устройство, показанное на фигуре 15а.
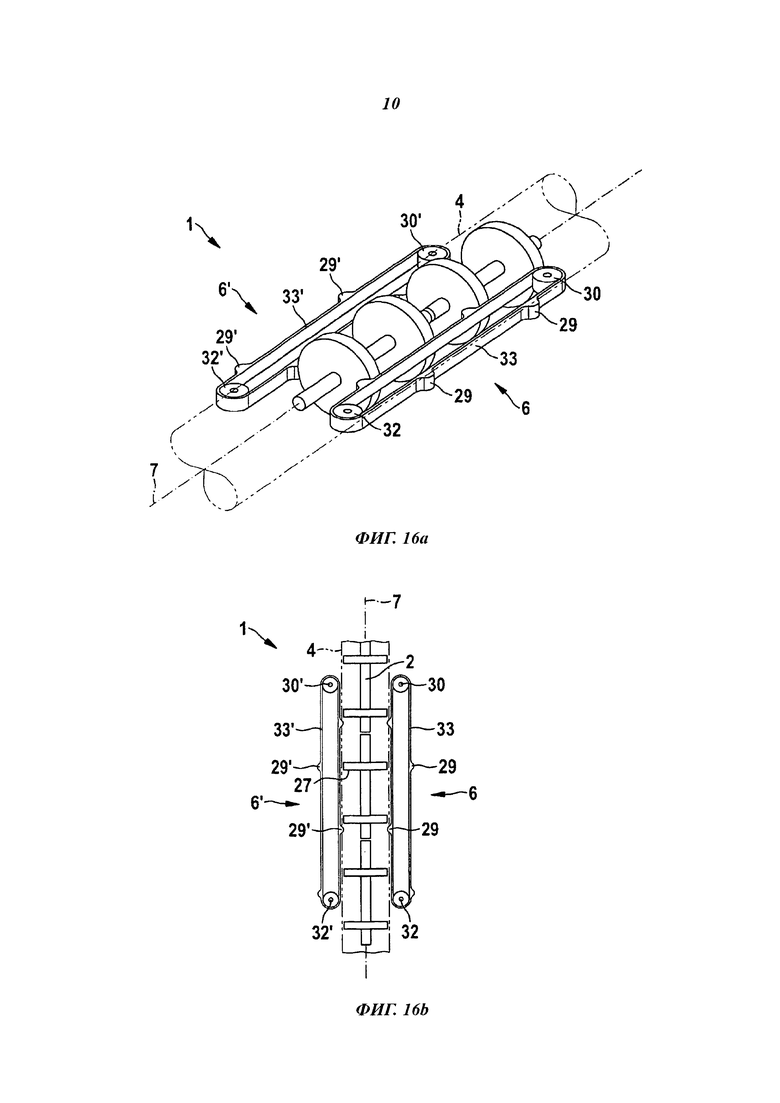
Фигура 16а: вид в аксонометрии другого варианта исполнения описываемого изобретением транспортирующего устройства с кулачками захватов, расположенными на двух приводных цепях.
Фигура 16b: вид сверху на транспортирующее устройство, показанное на фигуре 16а.
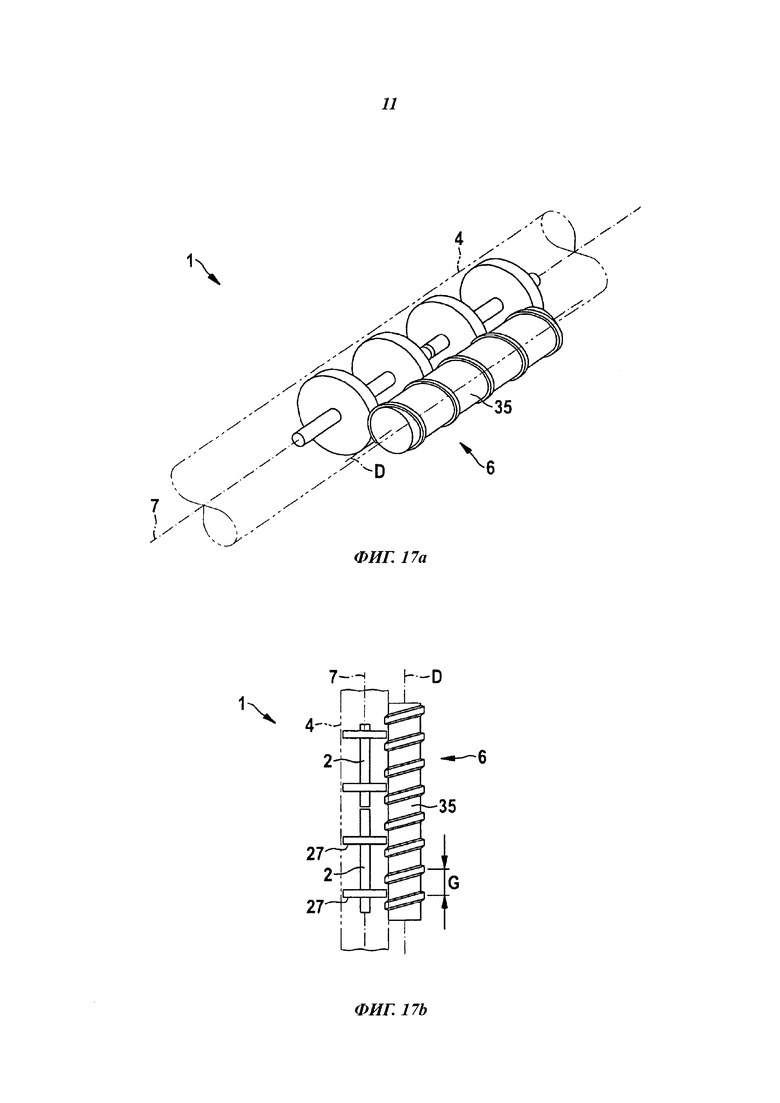
Фигура 17а: вид в аксонометрии другого варианта исполнения описываемого изобретением транспортирующего устройства с приводным шнеком.
Фигура 17b: вид сверху на транспортирующее устройство, показанное на фигуре 17а.
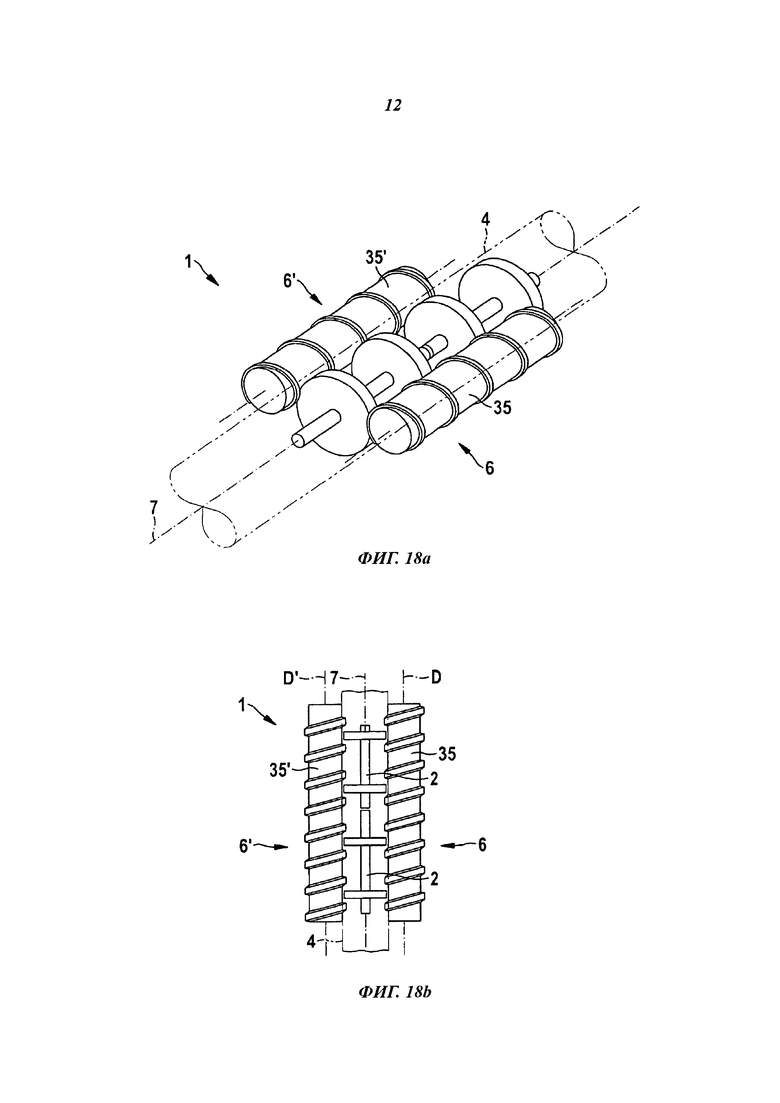
Фигура 18а: вид в аксонометрии другого варианта исполнения описываемого изобретением транспортирующего устройства с двумя приводными шнеками.
Фигура 18b: вид сверху на транспортирующее устройство, показанное на фигуре 18а.
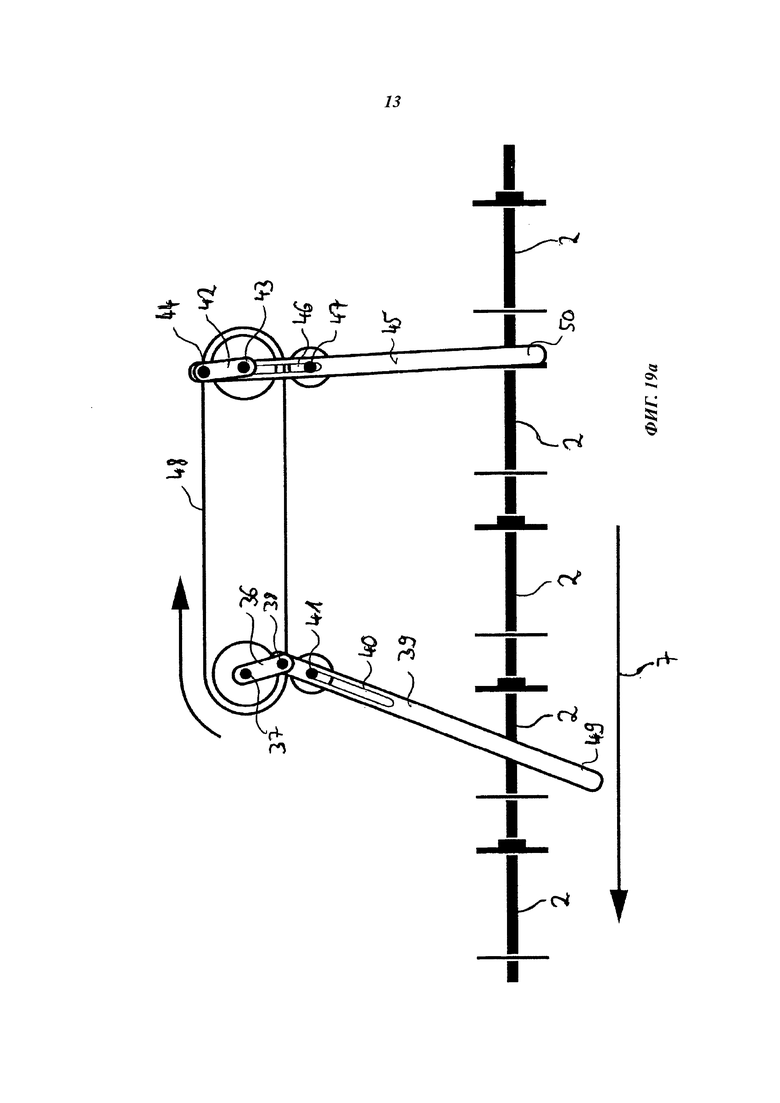
Фигура 19а: транспортирующее устройство с шарнирным четырехзвенником в первый момент времени.
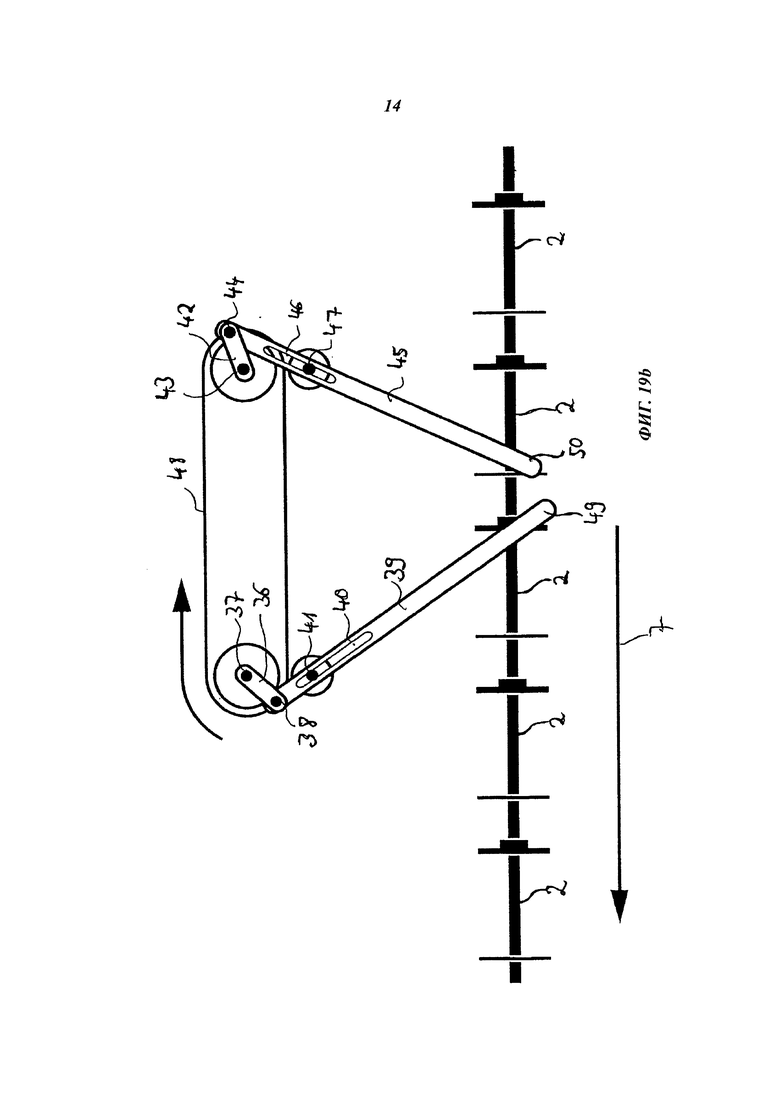
Фигура 19b: транспортирующее устройство, показанное на фигуре 19а, во второй момент времени.
Осуществление изобретения
На фигуре 1 в аксонометрии изображено описываемое изобретением транспортирующее устройство 1, предназначенное для транспортировки сыпучих материалов. Канал 4 транспортировки выполнен в виде транспортирующей трубы 5, которая может быть изготовлена, например, из стали или пластмассы. Канал 4 транспортировки замкнут в кольцо, поэтому расположенные в канале 4 транспортировки захваты 2 могут бесконечно циркулировать по этому каналу.
В транспортирующем устройстве 1 расположено несколько захватов 2, которые могут приводиться в движение посредством привода 6 на приводном участке 8. Захваты свободно расположены в канале 4 транспортировки вдоль оси канала транспортировки.
Сыпучий материал транспортируют в канал 4 транспортировки при помощи подающего устройства 18.
На фигуре 2 представлен вид спереди на транспортирующее устройство 1, изображенное на фигуре 1.
В дальнейшем одинаковые ссылочные позиции на фигурах будут относиться к одинаковым признакам и, следовательно, разъяснения к ним будут повторно приводиться только в случае необходимости.
На фигуре 2 показан выпуск 22. В процессе работы сыпучий материал транспортируют через подающее устройство 18 в канал 4 транспортировки. Сыпучий материал, находящийся в канале 4 транспортировки, перемещают с помощью ведомого захвата 2 к выпуску 22, на котором сыпучий материал падает с транспортирующего устройства 1, например, в приемный контейнер, не показанный на фигуре.
На фигуре 3 в аксонометрии изображен фрагмент, содержащий приводной участок 8 транспортирующего устройства 1, показанного на фигуре 1. Транспортирующая труба 5 имеет внутреннюю стенку 9, служащую для направления захвата 2 вдоль оси канала транспортировки.
На приводном участке 8 при помощи приводных рычагов 25 осуществляют передачу усилия на захваты 2, по существу, параллельно оси канала транспортировки. Приводные рычаги 25 перемещаются с помощью приводной цепи 24 на приводном участке 8, по существу, параллельно оси канала транспортировки. Усилие передается на захват 2, по существу, в периферийной области захвата 2, обращенной к внутренней стенке 9 канала транспортировки.
На фигуре 4 изображена спереди часть фрагмента транспортирующего устройства 1 согласно фигуре 3.
Приводные рычаги 25, приводящиеся от приводной цепи 24, входят в транспортирующую трубу 5 через отверстие 26. Поскольку сыпучий материал подают только в направлении вниз от приводного участка с приводом 6, уплотнение отверстия 26 будет необходимо не в любом случае.
На фигуре 5 схематично изображен фрагмент канала 4 транспортировки, выполненного в виде транспортирующей трубы 5 с двумя захватами 2. На стороне захватов 2, обращенной в направлении транспортировки, находятся выступы 17, служащие распорками. На стороне захватов 2, обращенной в противоположную направлению транспортировки сторону, имеются выемки 16, в которые, при необходимости, может входить выступ 17 соседнего захвата 2.
Захваты 2 содержат перемычки 23, которые в этом случае расположены, по существу, параллельно оси 7 канала транспортировки.
На фигуре 6 схематично изображен фрагмент транспортирующего устройства с изогнутым каналом транспортировки и двумя расположенными в нем захватами 2.
На фигуре 7 представлена фотография фрагмента транспортирующего устройства 1 с выполненным в виде транспортирующего лотка каналом 4 транспортировки, в котором показаны два захвата 2 с рычагом 17 и выемкой 16, находящиеся в изогнутом участке канала транспортировки.
На фигуре 8 в аксонометрии изображен захват 2, описываемый изобретением.
Захват 2, показанный на фигуре 8, содержит выступ 17, который при нормальных условиях эксплуатации расположен в канале транспортировки на стороне, обращенной в направлении транспортировки.
Захват 2 содержит первый поверхностный элемент 13, проницаемый для сыпучих материалов. Кроме того, захват 2 содержит второй поверхностный элемент 14, содержащий поверхность захвата, не показанную на фигуре. Первый поверхностный элемент 13 и второй поверхностный элемент 14 соединены между собой распоркой 23, осуществляющей кинематическую связь обоих поверхностных элементов и обеспечивающей нахождение этих элементов на некотором расстоянии друг от друга.
Кроме того, на стороне второго поверхностного элемента 14 захвата 2, обращенной в противоположную направлению транспортировки сторону, предусмотрена выемка 16, в которую может входить выступ 17 соседнего захвата 2.
На фигуре 9 изображен вид сбоку на описываемый изобретением захват 2, показанный на фигуре 8.
Захват 2 содержит распорку 15, выполненную в виде выступа 17. Выступ 17 выполнен в виде шара на оконечности, обращенной в сторону от захвата 2. На стороне захвата 2, противоположной направлению транспортировки, предусмотрена выемка 16, имеющая частично сферическую форму, то есть, шарообразная распорка 15 может входить в ответную выемку 16 следующего захвата.
Первый поверхностный элемент 13 и второй поверхностный элемент 14 кинематически соединены между собой перемычкой 23, причем первый поверхностный элемент 13 и второй поверхностный элемент 14 служат установочным устройством 11. Первый поверхностный элемент 13 проницаем для сыпучего материала.
На первой стороне второго поверхностного элемента 14 находится поверхность 10 захвата, предназначенная для транспортировки сыпучего материала вдоль канала транспортировки, а на второй стороне, противоположной первой стороне, - приводная поверхность 27. Приводная поверхность 27 может быть сделана эластичной, в частности, может быть изготовлена из пластмассы или резины. В альтернативном варианте приводная поверхность 27 может быть изготовлена из стали. Привод может передавать усилие на эту приводную поверхность 27 с целью приведения захвата 2 в движение.
Поверхности, ограниченные периметром первого поверхностного элемента 13 и второго поверхностного элемента 14, выполнены, по существу, подобными друг другу, что реализовано путем проецирования, по существу, параллельно средней нормали 12 к поверхности, что приводит к желаемой ориентации захвата 2 в канале транспортировки.
На фигуре 10 показан вид сбоку на описываемое изобретением подающее устройство 18, предназначенное для подачи сыпучего материала 3 в транспортирующую трубу 5 транспортирующего устройства.
Транспортирующая труба 5 содержит впуск 19, перекрывающий угловой диапазон а, равный примерно 90°. С помощью заслонки 20, выполненной в виде поворотной заслонки, можно отрегулировать угловой диапазон а в соответствии с предъявляемыми требованиями.
Подающее устройство 18 имеет отклоняющую область 21, расположенную под углом и отклонения, равным примерно 50° по отношению к направлению силы тяжести.
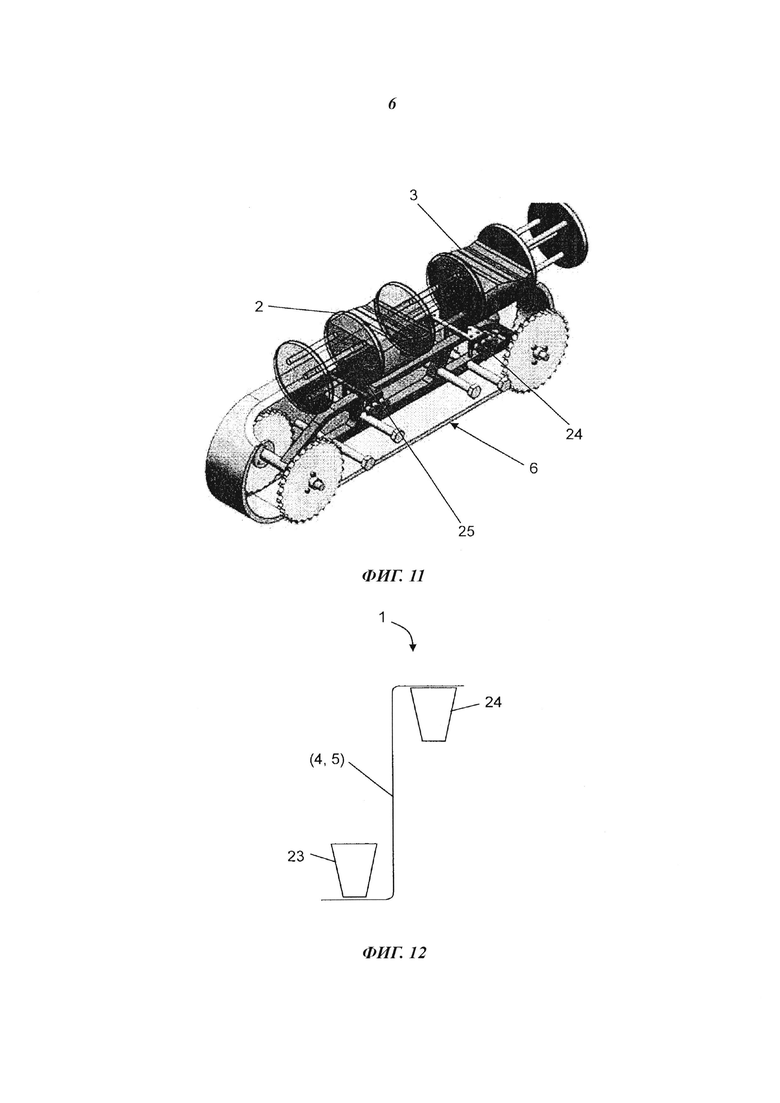
На фигуре 11 в аксонометрии изображен фрагмент альтернативного транспортирующего устройства, описываемого изобретением. Для улучшения обзора транспортирующая труба не показана.
В транспортирующей трубе расположено несколько захватов 2, причем на фигуре видно три захвата 2. С помощью приводной цепи 24 (показанной только местами) и расположенных на ней приводных рычагов 25 можно передавать усилие на захват 2, по существу, параллельно оси канала транспортировки. Захваты 2 не содержат распорок. Между захватами 2 находится сыпучий материал 3, что позволяет обеспечить требуемое расстояние между захватами 2.
На фигуре 12 схематично изображено транспортирующее устройство 1 с транспортирующей трубой 5, вид сбоку. Транспортирующая труба 5 имеет S-образную форму. В нижней части расположен входной резервуар 23, предназначенный для подачи сыпучего материала, транспортируемого в выпускной резервуар 24 при помощи не показанных на фигуре захватов. Впуск и выпуск не показаны на фигуре.
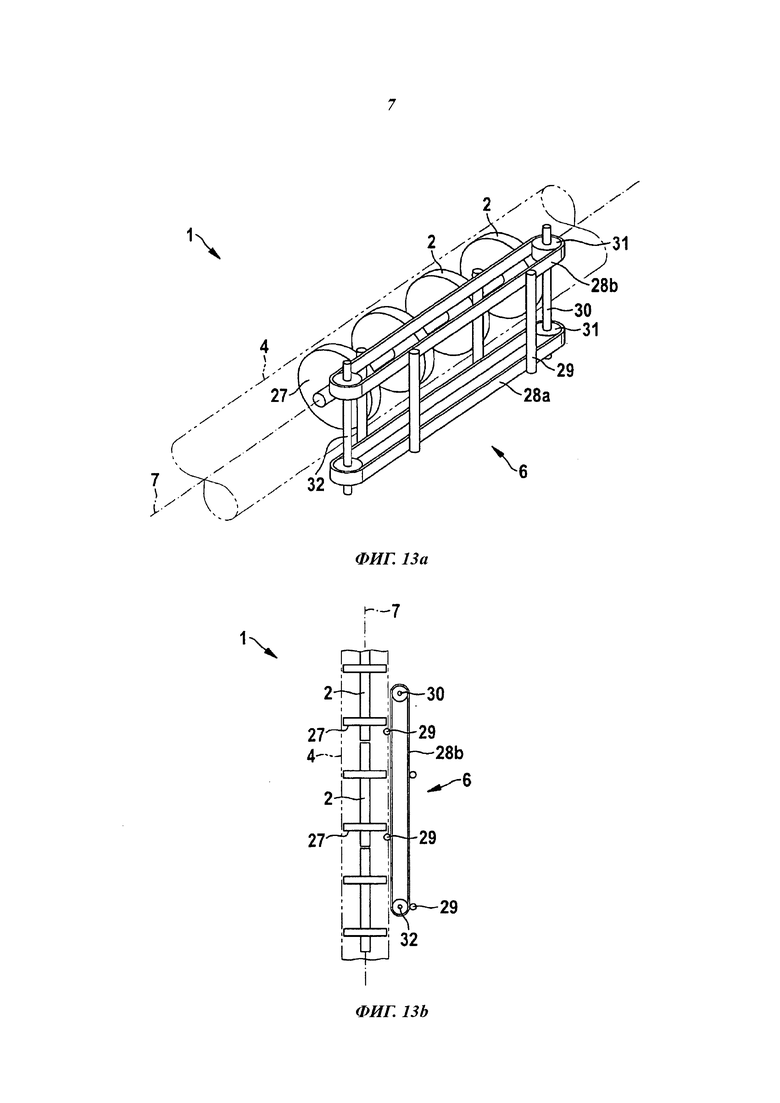
Транспортирующее устройство 1, показанное на фигурах 13а и 13b, содержит цепной привод 6 с парой приводных цепей, в состав которой входит нижняя приводная цепь 28а и верхняя приводная цепь 28b. На этих приводных цепях 28а, 28b закреплены четыре ведущих пальца 29, причем соответствующие нижние оконечности ведущих пальцев 29 закреплены на нижней приводной цепи 28а, а верхние оконечности ведущих пальцев 29 закреплены на верхней приводной цепи 28b. Таким образом, ведущие пальцы 29 ориентированы в вертикальном направлении. Две приводные цепи 28а, 28b приводятся в движение приводным валом 30 с двумя закрепленными на нем звездочками 31. На противоположной оконечности приводные цепи 28а, 28b отклоняются при помощи обводной оси 32. На приводных цепях 28а, 28b может быть закреплено больше или меньше четырех ведущих пальцев 29.
При вращении приводного вала 30 ведущие пальцы 29 движутся вдоль оси 7 канала транспортировки. В результате ведущие пальцы 29 вступают в контакт с приводными поверхностями 27 захватов 2 и, тем самым, приводят их в движение.
Расстояние между двумя соседними ведущими пальцами 29 составляет примерно 1,02 от растяжения захвата 2 вдоль оси 7 канала транспортировки и, следовательно, в смысле вышеприведенного определения, по существу, идентично этому растяжению. Тем самым можно гарантировать, что захваты 2 во время движения будут почти соприкасаться друг с другом. Тем не менее, соприкосновение не допускается, чтобы исключить случайные столкновения соседних захватов 2. Кроме того, длина приводного участка вдоль оси 7 канала транспортировки в два раза превышает длину захватов 2. Следовательно, в любой момент времени,по меньшей мере один захват 2 полностью находится на приводном участке.
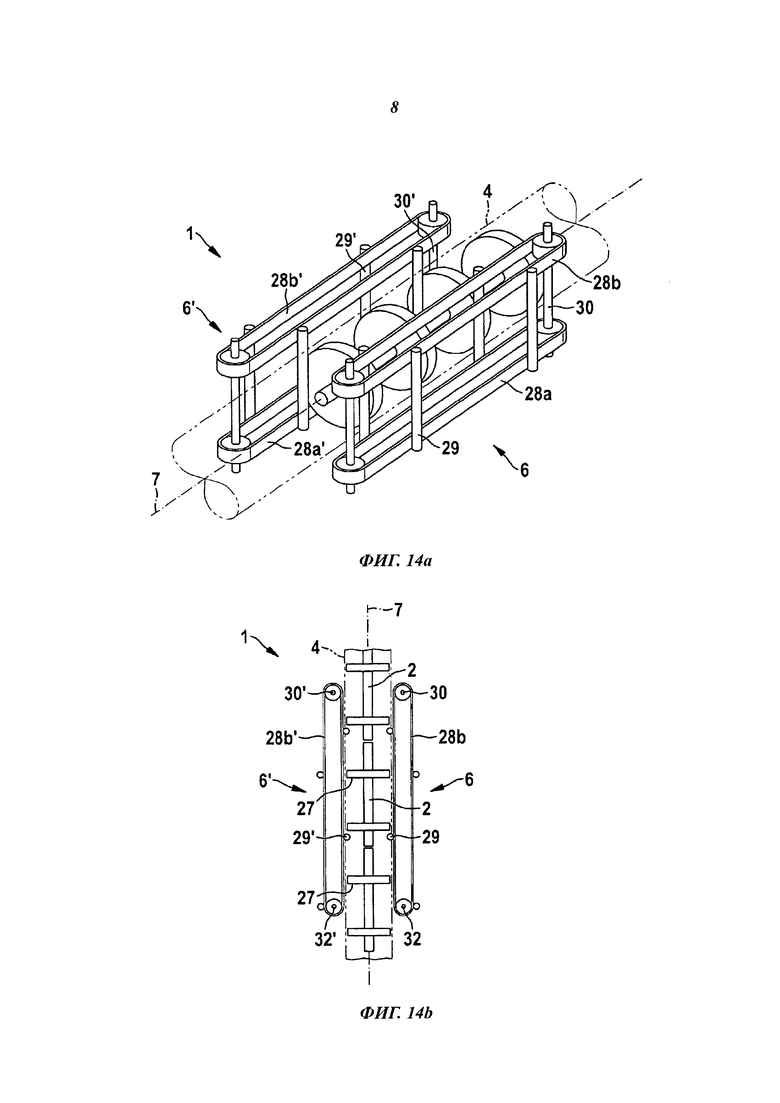
Вариант осуществления, показанный на фигурах 14а и 14b, предусматривает наличие двух цепных передач 6 и 6' с парами 28а, 28b и 28а', 28b' приводных цепей, содержащими, соответственно, четыре ведущих пальца 29 и 29'. Обе пары 28а, 28b и 28а', 28b' приводных цепей расположены на противоположных сторонах канала 4 транспортировки. Для обеспечения синхронного движения и вертикальной ориентации ведущих пальцев 29, 29' оба приводных вала 30, 30' можно приводить от общего двигателя при помощи зубчатой передачи, не показанной на фигуре.
Цепной привод 6 в варианте осуществления, показанном на фигурах 15а и 15b, содержит приводную цепь 33, которая приводится от приводного вала 30 и отклоняется отклоняющей осью 32. К приводной цепи 33 привинчено четыре кулачка 34, с помощью которых можно приводить в движение захваты 2. Приводная цепь 33 расположена сбоку от канала 4 транспортировки.
Расстояние между двумя соседними кулачками 34 составляет примерно 1,02 от растяжения захвата 2 вдоль оси 7 канала транспортировки и, следовательно, в смысле вышеприведенного определения, по существу, идентично этому растяжению. Тем самым можно гарантировать, что захваты 2 во время движения будут почти соприкасаться друг с другом. Кроме того, длина приводного участка вдоль оси 7 канала транспортировки в этом случае в два раза превышает длину захватов 2. Следовательно, в любой момент времени по меньшей мере один захват 2 полностью находится на приводном участке.
В отличие от фигур 15а и 15b, транспортирующее устройство 1, изображенное на фигурах 16а и 16b, содержит две противоположные приводные цепи 33, 33′ с соответствующими приводными валами 30 и 30′ и отклоняющими осями 32 и 32′, а также кулачки 34 и 34′. Кроме того, в этом варианте исполнения синхронизация двух приводных валов 30 и 30′ может быть достигнута при помощи зубчатой передачи, не показанной на фигурах.
В варианте осуществления, изображенном на фигурах 17а и 17b, привод выполнен в виде червячной передачи 6 с вращающимся приводным шнеком 35, ось D вращения которого проходит параллельно оси 7 канала транспортировки. В этом варианте исполнения захваты 2 приводятся в движение путем вращения приводного шнека 35 вокруг своей оси D вращения.
Растяжение захватов 2 вдоль оси 7 канала транспортировки примерно в 3,9 раза превышает шаг G приводного шнека 35. Тем самым можно гарантировать, что захваты 2 будут почти соприкасаться друг с другом во время движения.
Вариант осуществления, показанный на фигурах 18а и 18b, предусматривает наличие двух приводных шнеков 35, 35′ с соответствующими осями D, D′ вращения, проходящими параллельно оси 7 канала транспортировки. В этом случае синхронизация двух приводных шнеков 35 35′ также осуществляется посредством зубчатой передачи, не показанной на фигурах.
На фигурах 19а и 19b изображен привод 4, выполненный в виде шарнирного четырехзвенника. Первая оконечность первого рычага 36 закреплена на первом приводном валу 37, в то время как вторая оконечность первого рычага 36 соединена шарниром 38 с первой оконечностью второго рычага 39 с возможностью вращения. Второй рычаг 39 содержит паз 40, в который входит штифт 41, в результате чего становится возможным направление второго рычага 39. Кроме того, первая оконечность третьего рычага 42 закреплена на втором приводном валу 43, в то время как вторая оконечность третьего рычага 42 соединена шарниром 44 с первой оконечностью четвертого рычага 45 с возможностью вращения. Четвертый рычаг 45 содержит паз 46, в который входит штифт 47, в результате чего становится возможным направление четвертого рычага 45. Первый приводной вал 37 и второй приводной вал 43 приводятся в движение общим приводным ремнем 48, что позволяет синхронизировать вращение приводных валов 37, 43.
На фигурах 19а и 19b показан привод 6 в два различных момента времени. Привод 6 выполнен и расположен таким образом, чтобы при помощи второй оконечности 49 второго рычага 39 и второй оконечности 50 четвертого рычага 45 можно было передавать часть усилия на захваты 2 параллельно оси 7 канала транспортировки, когда привод 6 приводится в движение вследствие движения приводного ремня 48. Кроме того, привод 6 выполнен и расположен таким образом, чтобы вторая оконечность 49 второго рычага 39 передавала усилие на первый захват 2 до тех пор, пока вторая оконечность 50 четвертого рычага 45 не начнет оказывать усилие на второй захват 2, и наоборот. Длина приводного участка в этом варианте осуществления равна длине захвата 2.
В качестве альтернативы варианту осуществления, показанному на фигурах 19а и 19b, движением рычагов можно управлять при помощи по меньшей мере одной кулисы, предпочтительно по меньшей мере двух кулис, направляющих рычаги с вертикально ориентированными ведущими пальцами непосредственно над захватами или опосредованно расположенных в приводе.
Транспортирующее устройство (1) содержит канал (4) транспортировки в виде транспортирующей трубы (5), два захвата (2) и привод (6) для приведения в движение захвата (2) для транспортировки сыпучего материала (3) вдоль оси (7) канала транспортировки. Захват частично свободно расположен в канале (4) транспортировки вдоль оси (7) канала транспортировки. Усилия между двумя захватами (2), расположенными рядом друг с другом в канале (4) транспортировки параллельно оси (7) канала транспортировки, передается путем прямого контакта между ними и/или посредством сыпучего материала, находящегося в канале транспортировки между захватами (2). Привод (6) входит в канал (4) транспортировки на приводном участке (8) для передачи усилия на захват (2), расположенный на приводном участке (8) параллельно оси (7) канала транспортировки. Повышается надежность транспортирующего устройства. 4 н. и 12 з.п. ф-лы, 26 ил.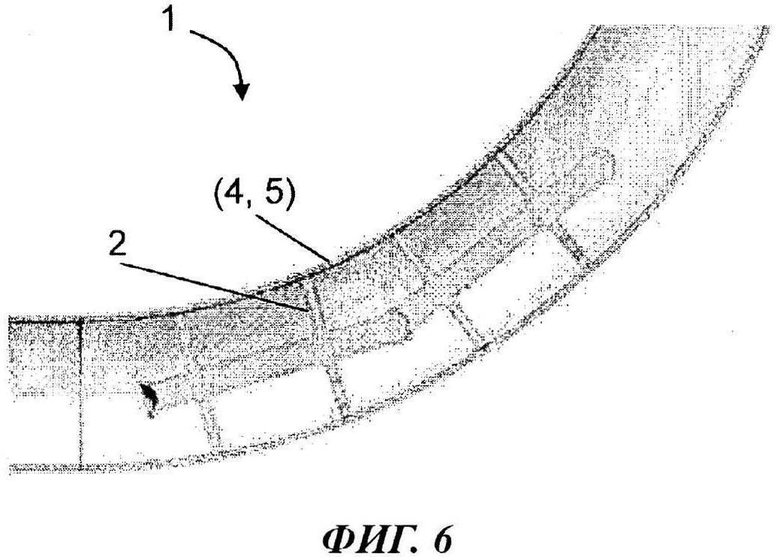
1. Транспортирующее устройство (1), содержащее канал (4) транспортировки, в частности транспортирующую трубу (5), по меньшей мере один захват (2), расположенный в канале (4) транспортировки, в частности по меньшей мере два захвата (2), и по меньшей мере один привод (6) для приведения в движение по меньшей мере одного захвата (2) для транспортировки сыпучего материала (3) вдоль оси (7) канала транспортировки, причем по меньшей мере один захват (2) по меньшей мере частично свободно расположен в канале (4) транспортировки вдоль оси (7) канала транспортировки, и обеспечена возможность передачи усилия между двумя захватами (2), расположенными рядом друг с другом в канале (4) транспортировки параллельно оси (7) канала транспортировки, путем прямого контакта между захватами (2) и/или посредством сыпучего материала, находящегося в канале транспортировки между захватами (2), отличающееся тем, что привод (6) входит в канал (4) транспортировки по меньшей мере на приводном участке (8) для передачи усилия на захват (2), расположенный на приводном участке (8), по существу, параллельно оси (7) канала транспортировки.
2. Транспортирующее устройство (1) по п. 1, отличающееся тем, что канал (4) транспортировки выполнен в виде устройства для направления захвата (2) вдоль оси (7) канала транспортировки.
3. Транспортирующее устройство (1) по п. 1, отличающееся тем, что привод (6) выполнен с возможностью передачи усилия непосредственно на захват (2), по существу, параллельно оси (7) канала транспортировки по меньшей мере на участках.
4. Транспортирующее устройство (1) по п. 1, отличающееся тем, что предусмотрена возможность выбора привода (6) или привод (6) выбран из списка, содержащего следующие типы приводов или их произвольные сочетания: цепной привод, ременный привод, кривошипный механизм, зубчатая передача, червячная передача, магнитная передача.
5. Транспортирующее устройство (1) по одному из пп. 3 или 4, отличающееся тем, что привод (6) содержит по меньшей мере один ведущий палец (29, 29′), посредством которого обеспечена передача усилия по меньшей мере на участках, непосредственно на захват (2), по существу, параллельно оси (7) канала транспортировки.
6. Транспортирующее устройство (1) по п. 5, отличающееся тем, что привод выполнен в виде цепного привода (6) и содержит по меньшей мере одну пару (28а, 28b; 28а′, 28b′) приводных цепей, причем каждая из двух противоположных оконечностей ведущего пальца (29, 29′) закреплена на соответствующей приводной цепи (28а, 28b; 28а′, 28b′) этой пары (28а, 28b; 28а′, 28b′).
7. Транспортирующее устройство (1) по одному из пп. 3, 4, 6, отличающееся тем, что привод выполнен в виде цепного привода (6) и содержит по меньшей мере одну приводную цепь (33, 33′), содержащую по меньшей мере один кулачок (34, 34′), посредством которого обеспечена передача усилия непосредственно на захват (2), по существу, параллельно оси (7) канала транспортировки по меньшей мере на участках.
8. Транспортирующее устройство (1) по одному из пп. 3, 4, 6, отличающееся тем, что привод выполнен в виде червячной передачи (6) и содержит по меньшей мере один вращающийся приводной шнек (35, 35′), посредством вращения которого обеспечена передача усилия непосредственно на захват (2), по существу, параллельно оси (7) канала транспортировки по меньшей мере на участках.
9. Захват (2) для транспортировки сыпучего материала (3) в транспортирующем устройстве (1) по одному из предыдущих пунктов, содержащий поверхность (10) захвата и установочное устройство (11) для по меньшей мере частичной ориентации средней нормали (12) к поверхности (10) захвата, по существу, параллельно оси (7) канала транспортировки, отличающийся тем, что установочное устройство (11) содержит по меньшей мере один первый поверхностный элемент (13) и второй поверхностный элемент (14), расположенные, по существу, на расстоянии друг от друга параллельно оси (7) канала транспортировки и кинематически соединенные друг с другом, причем средняя нормаль (12) к поверхности этих элементов, по существу, параллельна оси (7) канала транспортировки.
10. Захват (2) по п. 9, отличающийся тем, что при выравнивании средней нормали (12) к поверхности (10) захвата, по существу, параллельно оси (7) канала транспортировки поверхность (10) захвата перекрывает среднее поперечное сечение канала транспортировки менее чем на 100%, предпочтительно в диапазоне от 50 до 99,9%, особенно предпочтительно от 80 до 99,9%.
11. Захват (2) по одному из пп. 9 или 10, отличающийся тем, что первый поверхностный элемент (13) захвата, обращенный в направлении транспортировки сыпучего материала (3), проницаем для сыпучего материала (3), причем, в частности, второй поверхностный элемент (14) содержит поверхность (10) захвата.
12. Захват (2) по п. 11, отличающийся тем, что на стороне захвата (2), обращенной в направлении транспортировки, и/или в сторону, противоположную направлению транспортировки, предусмотрена распорка (15), в частности, по существу, выступ (17), параллельный оси (7) канала транспортировки и имеющий форму шара или купола на оконечности, обращенной в сторону от захвата (2).
13. Захват (2) по п. 12, отличающийся тем, что на стороне захвата (2), обращенной в направлении транспортировки, и/или в сторону, противоположную направлению транспортировки, предусмотрена выемка (16), выполненная таким образом, чтобы распорка (15) могла входить в выемку (16), причем, в частности, выемка (16) имеет форму воронки, и предпочтительно по меньшей мере частично имеет сферическую форму, и/или по меньшей мере частично параболическую форму.
14. Захват (2) по одному из пп. 9, 10, 12, 13, отличающийся тем, что захват (2) содержит по меньшей мере одну приводную поверхность (27), посредством которой привод (6) может передавать усилие непосредственно на захват (2), по существу, параллельно оси (7) канала транспортировки.
15. Способ транспортировки сыпучего материала (3) при помощи транспортирующего устройства (1) по одному из пп. 1-8, которое дополнительно содержит захват (2) по одному из пп. 9-14 и дополнительно содержит подающее устройство (18), содержащий этап транспортировки сыпучего материала (3) от впуска (19) к выпуску (22).
16. Способ оснащения и/или переоснащения транспортирующего устройства (1), предназначенного для транспортировки сыпучего материала (3), содержащий этап монтажа по меньшей мере одного захвата (2), в частности захвата (2) по одному из пп. 9-14 для получения транспортирующего устройства (1) по одному из пп. 1-8, и дополнительно содержащий этап монтажа подающего устройства (18).
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 5147029 A, 15.09.1992 | |||
| ТРУБЧАТЫЙ КОНВЕЙЕР | 1989 |
|
SU1737870A1 |
| Угломер с подвижным зеркалом | 1923 |
|
SU12565A1 |

