Область техники
Изобретение относится к технической области измерения уровня заполнения. В частности, настоящее изобретение относится к устройству измерения уровня заполнения на основе времени распространения сигнала, способу измерения уровня заполнения на основе времени распространения сигнала для выполнения способа отслеживания для группирования соответственно вызванных идентичными отражателями эхо-сигналов эхо-кривых, зарегистрированных в разное время, процессору для выполнения способа отслеживания, считываемому компьютером носителю и элементу программы.
Технические предпосылки
Устройства измерения уровня заполнения на основе времени распространения сигнала работают в соответствии с FMCW (частотно-модулированное непрерывное колебание) или импульсным способом на основе времени распространения сигнала. Эти устройства измерения посылают электромагнитные или акустические волны в направлении поверхности загруженного продукта. Эти волны затем отражаются полностью или частично от различных отражателей. Эти отражатели могут представлять собой, в частности, поверхность заполняющей среды (например, воды, масла (нефти), других флюидов или смесей флюидов или сыпучего материала), дно резервуара, в котором хранится заполняющая среда, примеси, разделительные слои между различными загруженными материалами (например, разделительный слой между водой и нефтью) или стационарные неоднородности в резервуаре, например, выступы или другие встроенные элементы резервуара.
Отраженный таким образом переданный сигнал (далее также называется принимаемым сигналом или эхо-кривой) теперь принимается устройством измерения уровня заполнения и регистрируется.
Устройства измерения уровня заполнения обычно работают в импульсном режиме, то есть передают в различные моменты времени передаваемый сигнал в форме импульса, и результирующий отраженный импульс переданного сигнала (принимаемый сигнал) затем, как описано выше, детектируется с помощью датчика устройства измерения уровня заполнения. Отсюда затем блок оценки устройства выводит положение или позицию поверхности заполняющей среды. Иными словами, из этого принятого импульса определяется уровень заполнения.
Другие устройства измерения уровня заполнения работают по принципу FMCW. При этом модулированные непрерывно по частоте колебания излучаются в направлении резервуара, и отраженные сигнальные составляющие обрабатываются в устройстве вместе с текущим излученным сигналом. Результатом этой обработки является частотный спектр, который может быть преобразован с помощью известных способов в эхо-кривую.
Полученные таким образом и, возможно, уже обработанные и оцененные данные могут быть предоставлены на внешнее устройство. Предоставление можно выполнить в аналоговой форме (4…20мА- интерфейс) или в цифровой форме (Feldbus).
Передача данных может также осуществляться беспроводным способом.
Полученная эхо-кривая, которая представляет собой переданный импульс (излученный в определенный момент времени ti), отраженный от одного или нескольких отражателей, обычно имеет один или несколько максимумов и/или минимумов, электрические расстояния которых относительно блока приема могут определяться из положения соответствующих максимумов или минимумов.
Эти электрические расстояния соответствуют временам распространения соответствующих сигнальных составляющих импульса. Учитывая скорость распространения сигнала, из них могут определяться физические, то есть фактические расстояния. Другими словами, электрические расстояния представляют собой значения абсцисс принимаемого сигнала, когда он представлен в системе координат (см. фиг.7). В этом случае не будут приняты во внимание никакие физические факторы окружающей среды, которые приводят к изменению скорости распространения электромагнитных волн. Электрическое расстояние, таким образом, может рассматриваться в качестве идеального условия модели. В связи с ним находятся физические расстояния. Под ними следует понимать такие значения расстояния, которые могут быть определены непосредственно датчиком физически (например, с метрической мерой). Система координат электрического расстояния может путем сдвига (компенсации смещения) и растяжения (компенсации времени распространения) быть переведена в систему координат, относящуюся к физическому расстоянию. Пояснение понятий еще раз четко приведено в ЕР 11167924.7.
В связи с неблагоприятными условиями в резервуаре, может случиться, что определенный эхо-сигнал эхо-кривой не может быть однозначно ассоциирован с треком, или что этот эхо-сигнал не распознается на эхо-кривой, так как он, например, теряется в шумах.
Кроме того, может оказаться, что физические условия в резервуаре изменяются, например, из-за изменения состава заполняющей среды.
Такие события могут привести к неточным измерениям или даже сделать определение уровня заполнения к определенному моменту времени даже невозможным.
Сущность изобретения
Задачей настоящего изобретения является улучшить определение уровней заполнения.
В соответствии с первым аспектом настоящего изобретения, предложено устройство измерения уровня заполнения на основе времени распространения сигнала, которое имеет передающий блок, приемный блок и блок оценки. Передающий блок служит для отправки передаваемого сигнала, который отражается на поверхности загруженного продукта заполняющей среды (которая например, находится в резервуаре) и по меньшей мере втором отражателе. Таким образом, устройство измерения уровня заполнения на основе времени распространения сигнала посылает передаваемый сигнал в направлении поверхности загружаемого продукта.
Приемный блок служит для регистрации отраженного переданного сигнала (также называемого принимаемым сигналом, принимаемым импульсом или эхо-кривой). Приемный блок может быть отдельным блоком. Но он также может определенные группы компонентов использовать совместно с передающим блоком. В случае радиолокатора уровня заполнения, общая группа компонентов может представлять собой, например, приемо-передающую антенну.
Отраженный переданный сигнал является эхо-кривой, которая в случае множества отражателей имеет множество эхо-сигналов. В общем случае эти эхо-сигналы не всегда могут быть четко распознаны в эхо-кривой, так как их амплитуда в некоторых случаях является слишком малой или потому, что они частично перекрывают друг друга.
Блок оценки служит для выполнения способа отслеживания для группировки соответственно относимых к идентичным отражателям эхо-сигналов и зарегистрированных в различные моменты времени эхо-кривых.
Способ отслеживания далее еще раз поясняется ниже со ссылкой на чертежи. В конечном счете, устройство измерения уровня заполнения на основе времени распространения сигнала записывает эхо-кривые в разные моменты времени, так что получается временная последовательность эхо-кривых, которые отражают временную эволюцию условий в резервуаре. Блок оценки теперь может анализировать каждую отдельную эхо-кривую и определять положение максимумов или минимумов.
Задача способа отслеживания состоит теперь в том, чтобы ассоциировать каждый максимум или минимум с отражателем в резервуаре или классифицировать как не ассоциируемый эхо-сигнал. Если это ассоциирование осуществляется корректным образом, то отсюда получается временная эволюция уровня заполнения и временная эволюция положений различных других отражателей в резервуаре. Временная эволюция положений может быть затем записана на диаграмме.
Если теперь исходить из постоянной скорости отбора или заполнения в резервуаре, то можно отдельные точки измерения (то есть вычисленные из следующих друг за другом эхо-кривых электрические расстояния или положения отражателей; сюда включается также расположение поверхности загружаемого продукта) приближенно отобразить сегментом прямой, как показано, например, на фиг.2. Формирование сегментов прямых является просто примером выполнения оптимизированного по памяти способа отслеживания. Любая другая соединительная линия, которая показывает проложенный след эхо-сигнала, исходящего от места отражения, также возможна в данном случае. Соединение эхо позиций, в которых эхо трека находилось в предыдущие моменты времени, таким образом, может быть осуществлено с помощью любой кривой. В простейшем случае это соответствует прямой линии. Однако могут также применяться полиномы более высокого порядка, или даже нелинейные функции, в зависимости от ситуации.
Если теперь скорость заполнения или скорость отбора заполняющего материала изменяется, то это приводит в способе отслеживания, который основан на формировании сегментов прямой, к перегибу в расчетной кривой. В этом случае речь идет о двух установленных рядом друг с другом сегментах прямой с различной крутизной.
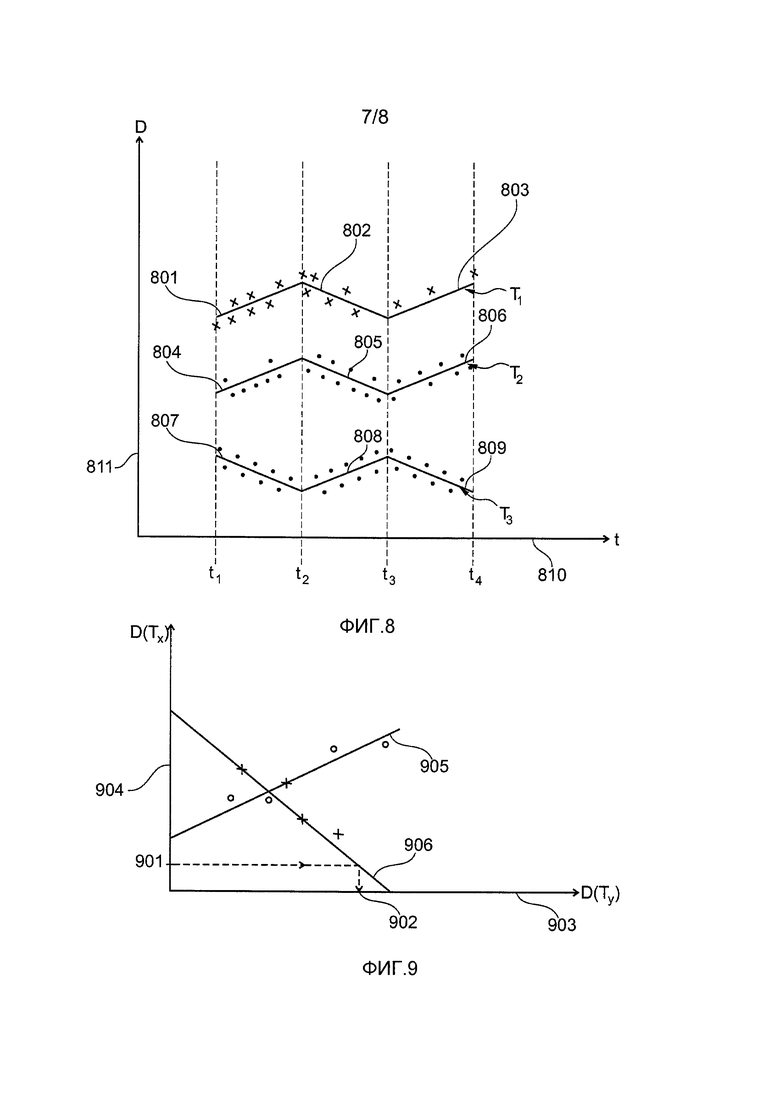
Так как для этого учитываются электрические расстояния, а не реальные физические расстояния, то, в зависимости от повышающегося или снижающегося уровня заполнения, также изменяется положение эхо-сигнала от дна или других стационарных отражателей, которые расположены ниже поверхности загруженного продукта. Это схематично показано на фиг.8.
В случае состыкованных сегментов прямой тогда говорят о треках. На фиг.8 показано три таких трека T1, Т2, Т3.
Один из таких треков в общем случае соответствует положению поверхности загруженного материала в различные моменты времени, другой трек - положению эхо-сигнала от дна, и третий трек - например, положению стационарного отражателя ниже поверхности загруженного продукта, положению границы раздела двух различных заполняющих сред или конца зонда в случае измерения уровня заполнения с направленными волнами.
Блок оценки устройства измерения уровня заполнения на основе времени распространения сигнала, таким образом, выполнен для определения первого трека первой группы эхо-сигналов, которые могут быть отнесены к первому отражателю (например, поверхности загруженного продукта, дну резервуара и т.д.), и второго трека второй группы эхо-сигналов, которые могут быть отнесены к второму отражателю (в данном случае, например, дну резервуара, поверхности загруженного продукта и т.д.), причем каждый трек описывает время распространения соответствующего переданного сигнала от передающего блока к ассоциированному с треком отражателю и обратно к приемному блоку в различные моменты времени (то есть, в различные моменты времени, в которые были отправлены различные передаваемые сигналы).
Кроме того, блок оценки выполнен с возможностью определения линейного отношения между первым треком и вторым треком.
Это линейное отношение является функциональной взаимосвязью между всеми позициями, которые прошел один трек, и всеми другими позициями, которые прошел второй трек. То, каким образом рассчитывается эта функциональная взаимосвязь, в частности, объясняется со ссылкой на фиг.1-4 ниже.
Поскольку теперь электрические положения стационарных отражателей ниже поверхности загруженного продукта изменяются соответствующим образом, как положение самой поверхности загруженного продукта, между двумя треками с математической точки зрения существует линейная взаимосвязь или линейное отношение, которое можно оценить, используя различные эхо-кривые.
После определения линейного отношения между первым треком и вторым треком, блок оценки затем может ассоциировать первый эхо-сигнал другой эхо-кривой с первым треком. Эта другая эхо-кривая записывается, например, в более позднее время, чем эхо-кривые, следующие друг за другом во времени, привлекаемые для определения линейного отношения между обоими треками. Таким образом, речь идет о новом измерении.
Блок оценки может затем определить одну или несколько неизвестных из линейного отношения между первым треком и вторым треком.
Неизвестными являются, например, ожидаемое положение второго эхо-сигнала другой эхо-кривой. С этой целью блок оценки привлекает, наряду с линейным отношением, еще положение первого эхо-сигнала в другой эхо-кривой, который связан с первым треком.
Из знания линейной взаимосвязи между обоими треками и дополнительной точки измерения (положение эхо-сигнала другой эхо-кривой), которая ассоциируется с первым треком, может затем вычисляться или оцениваться ожидаемое положение соответствующего другого эхо-сигнала (второго трека).
Таким образом, изобретение обеспечивает возможность, независимо от отношений амплитуд или скоростей заполнения, надежным образом отслеживать эхо-сигнал уровня заполнения даже при наличии помеховых эхо-сигналов, эхо-сигналов от дна или многократных эхо-сигналов.
Поскольку блок оценки может определить отношение между любыми двумя треками, этот способ может быть использован не только для эхо-сигнала уровня заполнения, но и для других эхо-сигналов эхо-кривой.
В соответствии с вариантом осуществления настоящего изобретения, первая группа эхо-сигнала представляет собой переданные сигналы, отраженные на поверхности загруженного материала.
В соответствии с другим вариантом осуществления настоящего изобретения, в случае неизвестной речь идет об ожидаемом положении эхо-сигнала, ассоциированного с вторым треком, другой эхо-кривой, причем другая эхо-кривая регистрировалась в более поздний момент времени, чем вышеописанные эхо-кривые.
В соответствии с другим вариантом осуществления настоящего изобретения, в случае неизвестной речь идет о диэлектрической постоянной заполняющей среды.
В соответствии с другим вариантом осуществления настоящего изобретения, устройство измерения уровня заполнения на основе времени распространения представляет собой TDR-устройство измерения уровня заполнения, причем неизвестная представляет собой длину зонда TDR-устройства измерения уровня заполнения.
В соответствии с другим вариантом осуществления настоящего изобретения, блок оценки выполнен таким образом, чтобы из определенной длины зонда путем сравнения с фактической длиной зонда, распознать, загрязнен ли зонд.
В соответствии с другим вариантом осуществления настоящего изобретения, блок оценки выполнен так, чтобы из определенной длины зонда посредством сравнения с фактической длиной зона вычислять качество (ранее определенной) диэлектрической постоянной. В этом случае исходят из того, что зонд не загрязнен.
В соответствии с другим вариантом осуществления настоящего изобретения, в случае неизвестной речь идет о высоте резервуара, в котором находится заполняющая среда, или о положении стационарного отражателя в резервуаре, который находится ниже поверхности загруженного продукта.
В соответствии с другим вариантом осуществления настоящего изобретения, определение треков и линейного отношения между соответствующими двумя треками осуществляется способом оценки.
Таким образом, отдельные (электрические) положения эхо-сигнала, ассоциированного с треком, различных эхо-кривых могут быть аппроксимированы посредством одного или более сегментов прямых.
В соответствии с другим аспектом настоящего изобретения, определение линейного отношения между первым треком и вторым треком осуществляется посредством рекурсивного способа.
В соответствии с другим аспектом настоящего изобретения, предложен способ измерения уровня заполнения на основе времени распространения для группирования соответственно связанных с идентичными отражателями эхо-сигналов зарегистрированных в разные моменты времени эхо-кривых. Способ включает в себя следующие этапы:
передача передаваемого сигнала, который отражается от поверхности загруженного продукта заполняющей среды и по меньшей мере одного второго отражателя;
регистрация отраженного переданного сигнала, который представляет собой эхо-кривую, которая содержит множество эхо-сигналов;
определение первого трека первой группы эхо-сигналов, которые вызваны первым отражателем, и второго трека второй группы эхо-сигналов, которые вызваны вторым отражателем, причем каждый трек описывает время распространения соответствующего переданного сигнала от передающего блока до ассоциированного с треком отражателя и обратно в приемный блок в различные моменты времени;
определение линейного отношения между отдельными положениями первого трека и положениями второго трека, и
определение одной или нескольких неизвестных из линейного отношения между первым треком и вторым треком.
Способ может также включать дополнительные этапы, описанные выше и далее.
В соответствии с другим аспектом настоящего изобретения, предложен процессор для выполнения способа отслеживания для группировки соответственно вызванных идентичными отражателями эхо-сигналов эхо-кривых, зарегистрированных в различные моменты времени. Способ отслеживания представляет собой способ, описанный выше и далее.
В соответствии с другим аспектом настоящего изобретения, предложен машиночитаемый носитель, на котором хранится программа, которая, при выполнении на процессоре устройства измерения уровня заполнения на основе времени распространения сигнала, инструктирует процессор выполнять этапы способа, описанные выше и далее.
В соответствии с другим аспектом настоящего изобретения, предложен элемент программы, который, при выполнении на процессоре устройства измерения уровня заполнения на основе времени распространения сигнала, инструктирует процессор выполнять этапы, описанные выше и далее.
В дальнейшем будут описаны примеры выполнения изобретения со ссылкой на чертежи.
Краткое описание чертежей
На фиг.1 показано представление на диаграмме взаимосвязи положений трека (электрических расстояний от отражателей), которые были получены из хронологически последовательных эхо-кривых, в соответствии с вариантом осуществления настоящего изобретения.
На фиг.2 показаны временные характеристики двух треков.
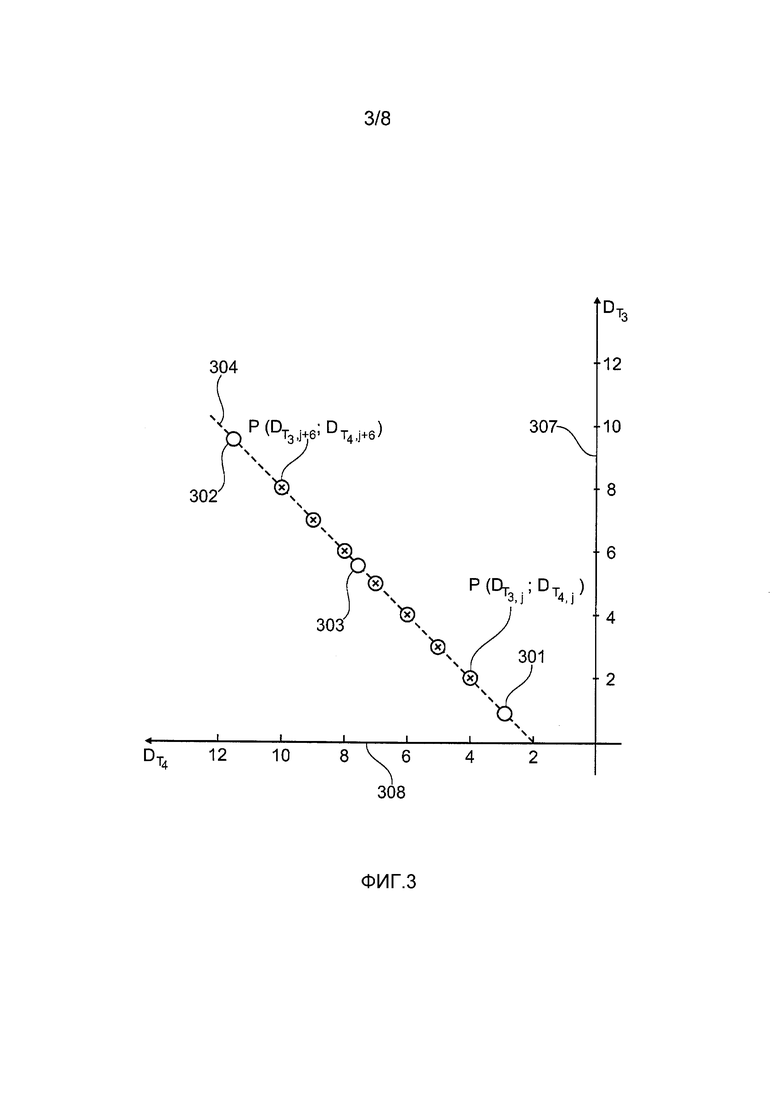
На фиг.3 показано представление на диаграмме линейного отношения положений треков для двух треков в соответствии с вариантом осуществления настоящего изобретения.
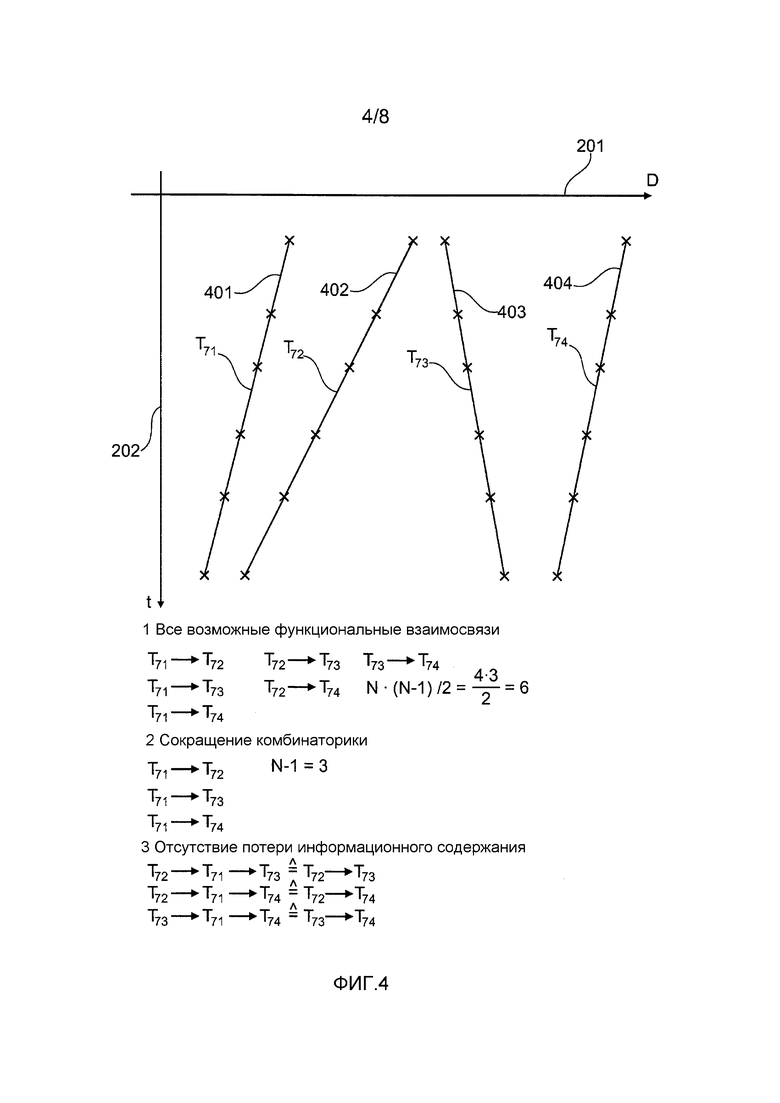
На фиг.4 показан способ для сокращения комбинаторики при определении уровня заполнения согласно варианту осуществления настоящего изобретения.
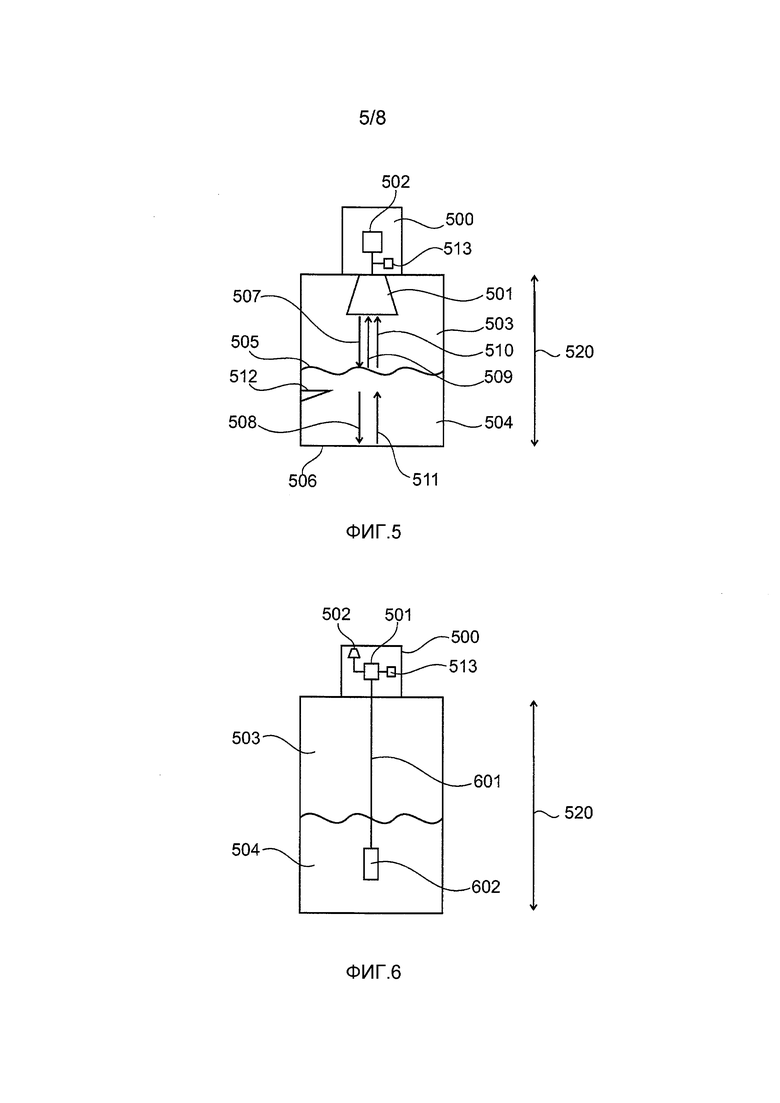
На фиг.5 показано устройство измерения уровня заполнения с резервуаром загружаемого продукта в соответствии с вариантом осуществления настоящего изобретения.
На фиг.6 показано еще одно устройство измерения уровня заполнения с резервуаром загружаемого продукта в соответствии с вариантом осуществления изобретения.
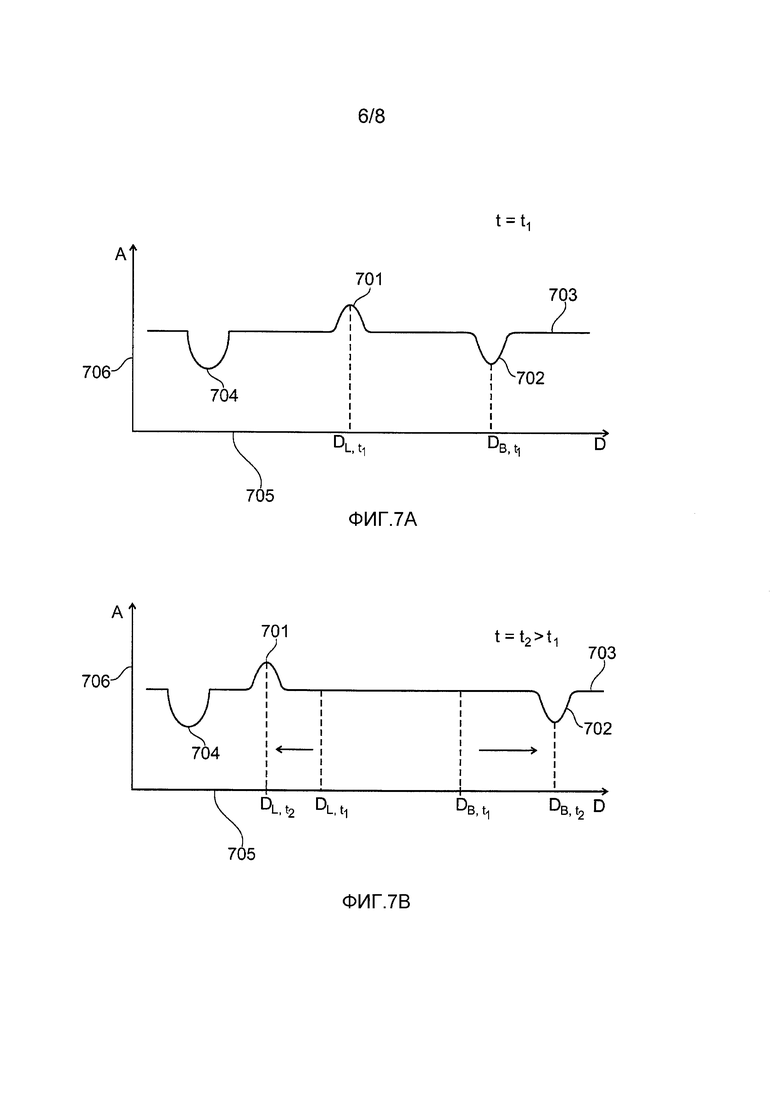
На фиг.7А показана эхо-кривая, полученная к первому моменту времени.
На фиг.7В показана эхо-кривая, полученная ко второму моменту времени.
На фиг.8 показана временная эволюция нескольких треков.
На фиг.9 показано линейное отношение между двумя треками.
На фиг.10 показана блок-схема последовательности операций способа согласно варианту осуществления изобретения.
Подробное описание вариантов осуществления
Представления на чертежах являются схематичными и приведены не в масштабе. Если одинаковые ссылочные позиции используются на различных фигурах, они относятся к одинаковым или подобным элементам. Однако те же или подобные элементы могут быть обозначены различными ссылочными позициями.
Ниже приведено возможное выполнение блока оценки устройства измерения уровня заполнения. Полученная эхо-кривая может быть сначала подвергнута обработке. За счет целенаправленной цифровой оценки сигнала, например, путем цифровой фильтрации, в способе извлечения эхо-сигналов легче определить существенные сигнальные составляющие из эхо-кривой.
Извлеченные эхо-сигналы могут быть сохранены для дальнейшей обработки, например в форме списка. Тем не менее, возможны и другие возможности для доступа к данным, кроме сохранения в форме списка. Функциональный блок отслеживания ассоциирует эхо-сигналы эхо-кривой к моменту времени ti с эхо-сигналами последующей эхо-кривой к моменту времени ti+1, причем эхо-сигналы прошли то же физическое место отражения и то же расстояние (то есть были получены путем отражения переданного сигнала на том же отражателе).
Способы отслеживания известны. Более подробную информацию можно найти, например, в WO 2009/037000 A2.
Основным аспектом изобретения является привести в соотношение друг с другом временную эволюцию двух треков, то есть временную эволюцию положений двух разных физических мест отражения или двух отражений, и отсюда определить параметры линейной взаимосвязи. Каждый трек состоит из последовательности значений положения, которые были определены из эхо-сигналов эхо-кривой. Поскольку в устройствах измерения уровня заполнения должно измеряться расстояние от датчика до загруженного продукта, наряду с термином «положение», также применяется термин «расстояние».
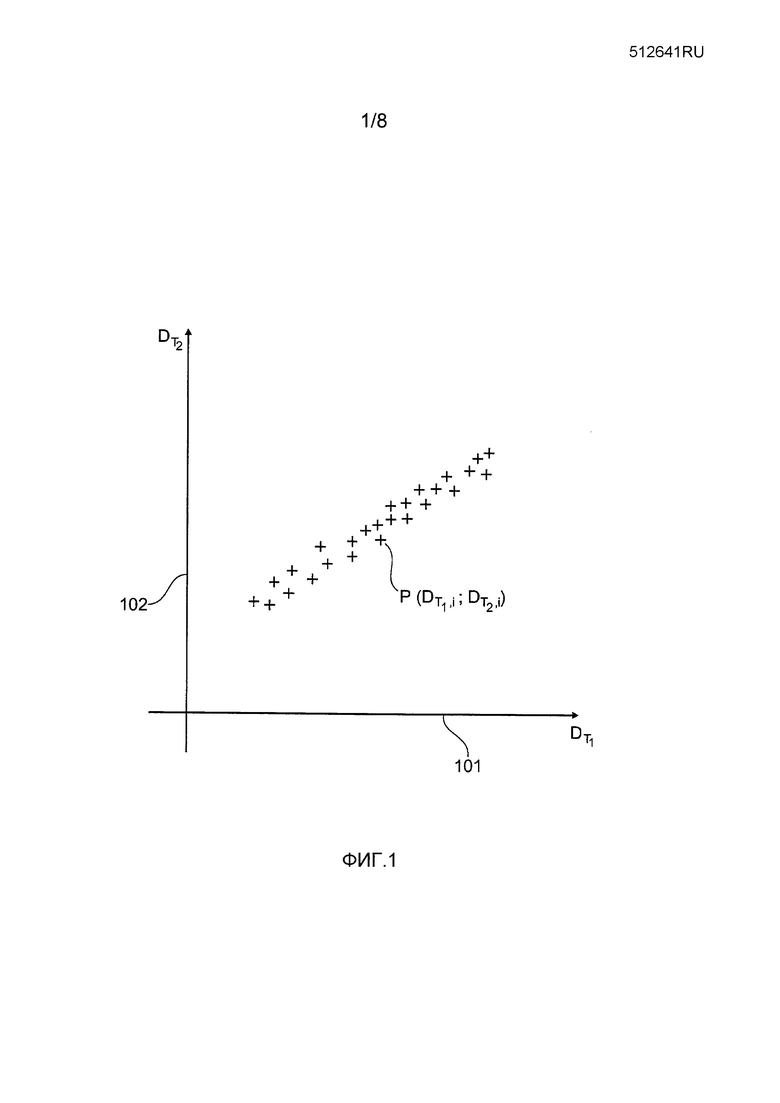
Фиг.1 предназначена для более подробного объяснения соотношения между двумя треками. Система координат показывает облако точек, которое формируется из пар расстояний отдельных значений положений двух треков. Например, треки обозначены как трек Т1 и трек T2. Тем не менее, могут быть использованы любые другие возможные комбинации из двух разных треков.
Каждая пара расстояний отмечена крестом. Ось абсцисс (ось х 101) включает расстояние D трека T1, ось ординат (ось y 102) включает расстояние D трека T2. Это расположение не является обязательно требуемым. Так ось абсцисс и ось ординат могли бы также быть взаимозаменяемыми.
Кроме того, единица измерения масштабирования оси не существенна для настоящего изобретения. Так электрическое расстояние D взято здесь лишь для примера. Также временное масштабирование положения в соответствии с эхо-кривой было бы возможным. Пара расстояний на фиг.1 отдельно обозначена для более точного объяснения. Пара расстояний 
Показанная на фиг.1 взаимосвязь положений обоих треков делает ясным, что положения трека Т1 и трека Т2 могут быть приведены в соотношение. Это означает, что трек Т1 и трек Т2 находятся в функциональной взаимосвязи. Уравнение прямой, которое описывает облако точек, служит для этого в качестве основы. Математически эта взаимосвязь описывается следующим образом:



а0 и а1 - параметры прямой, которые описывают линейную взаимосвязь между положением трека Т1 и трека Т2;
ek - ошибка взаимосвязи для измерения в момент времени k.
Параметр а1 функции является безразмерным, в то время как а0 имеет ту же единицу измерения, что и 


Формула (1.1) является просто выражением взаимосвязи. Конечно, она может быть применена к каждому треку и не требует обязательно трека Т1 и трека Т2 в качестве основы. Однако тогда значения параметров а1 и а0 являются отличными от взаимосвязи между треком Т1 и треком Т2.
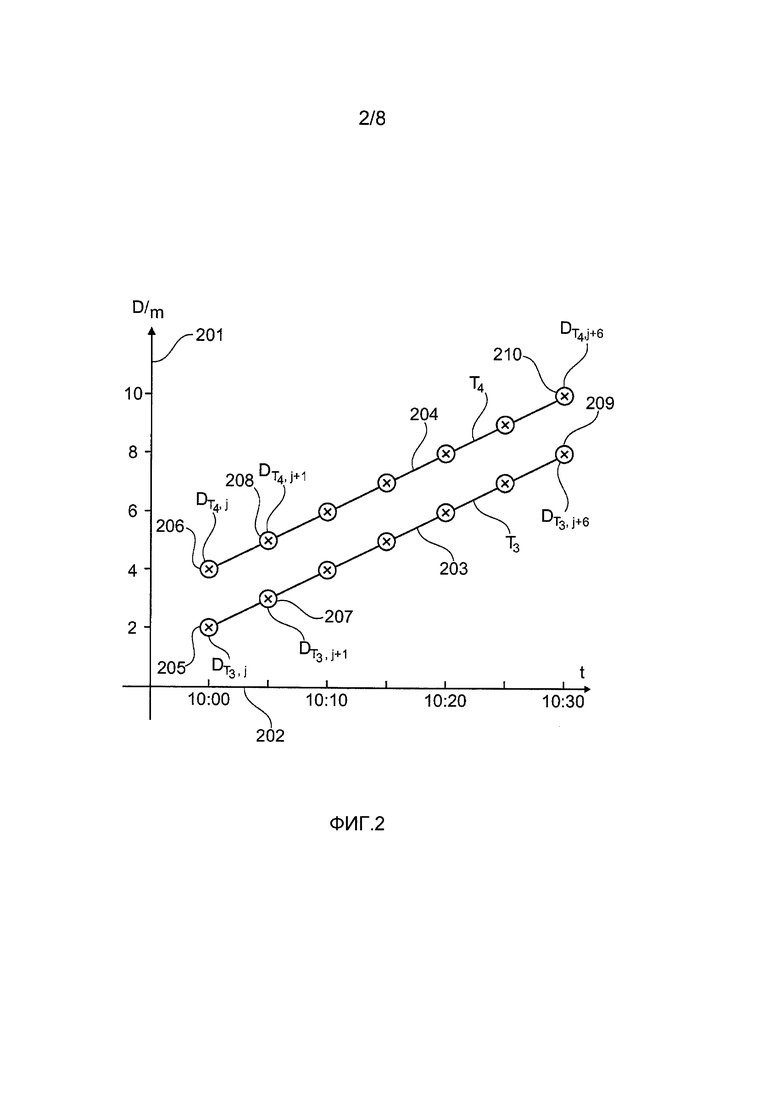
На фиг.2 показан пример прохождения двух треков (Т3 203 и Т4 204) во времени. Оси х 201 указывает расстояние в метрах, а ось у 202 обозначает время измерения t. Опорные точки 205, 207, 209,… и 206, 208, 210… треков 203, 204, которые получаются из положений эхо-сигналов эхо-кривых к соответствующему моменту j времени, отмечены посредством «х».
Если перенести опорные точки из фиг.2 на диаграмму, которая показывает, как фиг.1, соотношение между обоими треками, то получим диаграмму, показанную на фиг.3. Ось х 307 здесь включает положения трека Т3, ось у 308 здесь включает положения трека Т4. Кроме того, линейная взаимосвязь 304 между обоими треками показана в виде пунктирной линии. Здесь можно теперь видеть, что в дополнение к опорным точкам на фиг.3, также могут быть получены дальнейшие выводы о взаимосвязи между двумя треками. Как для положений 303, которые находятся между опорными точками, так и для положений 302 и 301, которые находятся рядом с опорными точками, может быть применена взаимосвязь. Это также означает, что, когда положение одного трека известно, положение другого трека может быть предсказано. Это предсказание является обратимым. В примере по фиг.3, это означает, что положение трека Т4 может быть предсказано из положения трека Т3, и наоборот. Кроме того, не только может быть сделано предсказание, но также оценка положения трека может быть представлена, если определение положения трека в связи с неблагоприятными условиями сигнала не было бы возможным.
Определение параметров а0 и а1:
Параметры а0 и а1 могут самостоятельно определяться датчиком с помощью подходящего способа оценки параметров, которые хорошо известны специалисту в данной области техники. В связи с ошибкой в базовой модели, выгодна так называемая оценка параметров, чтобы минимизировать ошибку определения параметров. Сама оценка может быть произведена различными способами. Возможно применение общих способов оценки параметров, таких как LS-оценщика. LS оценщики подробно описаны в литературе. Оценка может быть выполнена, например, следующим образом:




Для того чтобы пары положений не постоянно сохранять в памяти, эти способы могут быть реализованы рекурсивно. Оценка может быть изначально подверженной ошибкам, но улучшается с увеличением числа пар значений. Конечно, необходимо сначала определить параметры, прежде чем можно будет получить прогнозирование текущего положения трека из положения другого трека.
Описанное изобретение может быть расширено с выгодой. Эхо-кривая часто показывает большое количество эхо-сигналов, что влечет за собой множество треков. В описанном способе в общем случае все треки приводятся между собой в соотношение. Это означает, что из каждого отдельного трека непосредственно можно сделать вывод о месте каждого другого трека. Число А устанавливаемых функциональных взаимосвязей может быть вычислено в зависимости от числа N треков по формуле
A=N·(N-1)/2
При четырех отслеживаемых треках затем необходимо создать, вычислить, поддерживать и сохранять шесть взаимосвязей. Расширение изобретения обеспечивается за счет целевого снижения комбинаторики. Фиг.4 показывает полное перечисление при четырех различных треках. Функциональные взаимосвязи показаны стрелкой. Направление стрелки является лишь иллюстративным, так как взаимосвязь также является обратимой. Если, например, известна взаимосвязь Т71→T72, то также может быть вычислена взаимосвязь Т72→T71 путем формирования обратной функции. Кроме того, фиг.4 показывает возможность сокращения комбинаторики без снижения значимости изобретения. К примеру, сокращение выполнялось на основе трека T71. Взаимосвязи между Т72 и T73, Т72 и T74 или Т73 и T74 могут быть вычислены из взаимосвязей между Т71 и T72, Т71 и T73 или Т71 и T74. Тогда необходимо только сохранение и расширение
А=N-1
(на фиг.4 тогда трех) функциональных взаимосвязей. Сокращение предусматривает, что тогда нужно выбрать трек в качестве отправной точки сокращения. Этот трек можно было бы также обозначить как промежуточный трек. В примере по фиг.4 это трек Т71. Разумеется, мог бы также выбираться и другой трек в качестве промежуточного трека. То, что никакое информационное содержание не теряется, показывает цепочка вычислений по фиг.4. Например, можно взаимосвязь между Т72→T73 определить из обеих взаимосвязей Т71→T72 и Т71→T73. Для этого должна быть образована обратная функция Т71←T72 из Т71→T72. Затем может быть создана расширенная взаимосвязь Т72→T71→T73, и место трека Т73 определено из трека T72, не требуя перед этим оценивать параметры функционального выражения для взаимосвязи Т72→T73. Здесь проявляются преимущества в эффективности, так как оценка параметров требует большого объема вычислений. К тому же экономится объем памяти.
Ключевым аспектом расширения является, таким образом, то, что комбинаторика может быть сокращена, если при вычислении позиции трека ТА из позиции трека ТВ всегда производится вычисление через промежуточный трек ТС.
Ключевой аспект описанного способа заключается в оценке параметра целевой функции, которая затем описывает взаимосвязь положения между двумя треками. Если параметры целевой функции во время работы устройства измерения уровня заполнения были достаточно хорошо определены, то из положения одного трека можно сделать вывод о положении другого трека. Так как параметры зависят от места измерения (места встраивания, штуцера, фланца, дна резервуара, крышки резервуара, заполняемого продукта, элементов конструкции в резервуаре), параметризация не может осуществляться на заводе.
Фиг.5 показывает устройство 500 измерения уровня заполнения на основе времени распространения, которое установлено в резервуаре. Устройство 500 измерения уровня заполнения представляет собой, например, радиолокатор измерения уровня заполнения или ультразвуковое устройство. Это устройство 500 измерения уровня заполнения посылает свободно излучаемые волны, например, в форме импульсов, 507 в направлении поверхности 505 загруженного продукта. В случае радиолокатора измерения уровня заполнения для этого предусмотрена антенна 501, например, в форме рупорной антенны. Этот передаваемый сигнал или передаваемый импульс 507 генерируется с помощью генератора 513 сигналов и излучается посредством приемо-передающего блока 501. Излученный передаваемый сигнал 507 попадает на поверхность 505 загруженного продукта, который находится в резервуаре. Перед этим он проходит через среду, находящуюся над поверхностью 505 загруженного продукта, например, атмосферу резервуара.
Часть переданного сигнала 507 отражается от поверхности загруженного продукта и распространяется назад как эхо-сигнал 509 к приемно-передающему блоку 501. Другая часть переданного сигнала 507 проникает в заполняющую среду 504 и распространяется к дну 506 резервуара (см. сигнальную составляющую 508). Там она отражается и распространяется как так называемый эхо-сигнал 511 от дна назад в направлении приемо-передающего блока 501. Часть этого эхо-сигнала от дна вновь отражается назад (на поверхности 505 загруженного продукта). Другая часть эхо-сигнала 510 от дна, однако, проникает через поверхность 505 загруженного продукта и может приниматься приемо-передающим блоком 501 и направляться на блок 502 оценки.
Часть переданного сигнала 507 может отражаться также на других отражателях. Примером этого может быть выступ 512, выполненный на стенке резервуара, который находится ниже поверхности загруженного продукта.
Фиг.6 показывает другой пример встроенного в резервуар устройства 500 измерения уровня заполнения. Оно представляет собой TDR-устройство измерения уровня заполнения, которое работает по принципу направленных волн. Здесь речь может идти о микроволнах или других волнообразных передаваемых сигналах, которые вдоль провода 601 или например, внутри полого волновода направляются в направлении поверхности загруженного продукта и частично также в загруженный продукт. В конце провода 601 находится, например, груз 602 для выпрямления провода.
На фиг.7А показан пример эхо-кривой, записываемой в блоке оценки. Эхо-кривая 703 имеет два минимума 702, 704 и максимум 701.
Здесь следует отметить, что горизонтальная ось 705 представляет электрическое расстояние (которое соответствует времени распространения отдельных участков эхо-кривой 703), а вертикальная ось 706 - амплитуду отдельных участков эхо-кривой 703.
Максимум 701 может представлять собой, например, эхо-сигнал, отраженный от поверхности загруженного продукта, а минимум 702, например, - эхо-сигнал, отраженный от конца зонда 601, 602 на фиг.6, или эхо-сигнал, отраженный от дна 506 резервуара на фиг.5.
Эти эхо-кривые получены к моменту времени t1.
На фиг.7В показана соответствующая эхо-кривая, которая получена к более позднему моменту времени t2. Как можно видеть из этой кривой, как эхо-сигнал 701 от загруженного продукта, так и эхо-сигнал 702 от конца зонда или дна сдвинулись, в общем случае в противоположных направлениях. Это объясняется тем, что эхо-сигнал от конца зонда или от дна находится ниже поверхности загруженного продукта.
Если теперь блок оценки устанавливает, что эхо-сигнал 701 представляет собой эхо-сигналы, которые вызваны идентичным отражателем (в этом случае поверхностью загруженного продукта), и устанавливает, что эхо-сигналы 702 также обусловлены другим идентичным отражателем (дном резервуара или концом зонда), то может сгруппировать эхо-сигналы 701 в первую группу, а эхо-сигналы 702 - во вторую группу. Если теперь принимается много эхо-кривых в различные моменты времени, то могут быть представлены электрические расстояния отдельных эхо-сигналов посредством треков, например, в форме состыкованных сегментов прямых. Это показано на фиг.8. Поперечная ось 810 обозначает моменты времени ti, в которые измерялись отдельные эхо-кривые, а вертикальная ось 811 обозначает электрическое расстояние, которое пройдено различными эхо-сигналами отдельных эхо-кривых.
Первый трек Т1 состоит из трех сегментов 801, 802, 803 прямой, которые имеют различную крутизну, в зависимости от того, с какой скоростью резервуар наполняется или опустошается. Сегмент 801 прямой описывает заполнение резервуара между моментами времени t1 и t2, сегмент 802 - опустошение между моментами времени t2 и t3, и сегмент 803 - вновь заполнение между моментами времени t3 и t4.
Как должны символизировать крестики вокруг сегментов 801, 802, 803 прямых, выполнялись многочисленные измерения (регистрации эхо-кривых), так что сегменты с 801 по 803 прямых могут определяться с достаточной точностью.
Полученные эхо-кривые еще имеют две другие группы эхо-сигналов, электрические расстояния которых могут аппроксимироваться, соответственно, посредством сегментов 804, 805, 806 или 807, 808, 809 прямых.
Как можно видеть из фиг.8, перегибы трех треков от Т1 до T3 находятся, соответственно, на тех же моментах времени t2, t3 и t4.
Теперь можно соответствующие два трека сопоставлять, чтобы определить функциональную взаимосвязь между отдельными треками. Если взять соответственно две пары треков, то отсюда получаются две приближенные прямые 905, 906 (см. фиг.9). Здесь поперечная ось 903 обозначает электрическое расстояние эхо-сигналов первой эхо-группы (то есть первого трека Ty), а вертикальная ось 904 обозначает электрическое расстояние эхо-сигналов второй эхо-группы (то есть второго трека Тх). В этой связи специалисты часто также говорят об «отслеживаемой позиции». Под этим, как описано выше, следует понимать соответствующее электрическое расстояние, которое прошел определенный эхо-сигнал определенной эхо-кривой на своем пути до приемного блока.
Посредством определения функциональной взаимосвязи можно улучшить отслеживание эхо-сигналов.
Посредством определения функциональной связи между любыми треками является возможным определять положение одного трека из положения второго трека.
Функциональная взаимосвязь может определяться в форме линейной взаимосвязи (в контексте изобретения также называется «линейным отношением»):
Это уже было описано выше. Символ «крышки» над параметрами а0 и а1 должен символизировать, что эти параметры представляют собой оценки.
Классификация треков не требуется. Под классификацией здесь понимается то, что может быть сделан вывод, идет ли речь, например, о треке эхо-сигнала от уровня заполнения, от дна, препятствия или многократного эхо-сигнала.
При знании об уровне заполнения или относящемся к этому треку уровня заполнения, можно вычислить другие неизвестные параметры.
Определение диэлектрической постоянной
Для определения диэлектрической постоянной электромагнитной волны в измеряемой среде требуется:
1. Трек к уровню заполнения
2. Трек к постоянному месту отражения (эхо-сигнал) ниже уровня заполнения
а. дно резервуара/конец зонда при направленной микроволне
b. эхо-сигнал от препятствий (металлических распорок и т.д.).
В последующих формулах в качестве примера даются ссылки на эхо-сигнал от уровня заполнения и эхо-сигнал от дна. Вместо эхо-сигнала от дна может также приниматься и другой эхо-сигнал, который вызывается посредством отражателя, который находится ниже поверхности загруженного продукта. Эхо-сигнал от дна служит только в качестве примера:
Согласно здесь подробно не приводимому выводу получают для параметра 
Индекс L здесь в качестве примера относится к воздуху и описывает среду выше измеряемой среды (загруженного продукта).
Индекс В относится здесь к дну и описывает измеряемую среду.
Измеряемым параметром является 
Для


Достаточно точным приближением для
И поэтому:

Для μВ для релевантных сред справедливо μВ=1 и, тем самым, εВ может быть вычислено. εВ соответствует диэлектрической постоянной. Если нежелательно выполнять оценку ввиду надежности измерений, то требуемые значения могут, разумеется, параметризироваться, то есть заменяться истинными или по меньшей мере приближенными значениями.
Определение длины зонда/высоты резервуара/места стационарного отражателя
Для определения длины зонда требуется:
1. Трек к уровню заполнения
2. Трек к дну/дну резервуара
Согласно не приводимому здесь подробному выводу получают для параметра 
При приведенном выше приближении справедливо:
Как уже объяснялось, dBottom в общем случае соответствует положению дна, конца зонда или стационарного отражателя ниже поверхности загруженного продукта. dBottom представляет собой физическое расстояние до соответствующего стационарного отражателя.
Преимущество данного способа состоит в том, что резервуар не требуется опустошать, чтобы определить положение дна резервуара или конца зонда. Тем самым обеспечивается ввод в эксплуатацию без параметризации радиолокационного устройства измерения уровня заполнения, или параметризация облегчается (не требуется задавать высоту резервуара/длину зонда).
Распознавание загрязнения
При определенной длине зонда можно (при направленных микроволнах), если длина зонда предварительно параметризировалась на заводе или потребитель сам ее ввел вручную, распознать загрязнение зонда. Эта функция служит для диагностики. Загрязнение зонда, независимо от того, произошло ли это за счет локального прилипания, или произошло загрязнение/смачивание всего зонда, вызывает сокращение скорости распространения электромагнитных волн. Измеренный конец зонда отклоняется тогда от параметризированного конца зонда, что сигнализирует загрязнение. Затем может быть выдано оповещение о загрязнении, и/или может осуществляться автоматизированная коррекция измеренных значений.
Вычисление качества определенной диэлектрической постоянной
Вычисление параметров а0 и а1 осуществляется посредством оценщика синхронным образом. Оценщик представляет собой программу, которая может исполняться при каждом измерении. Тем самым можно для каждой вычисленной диэлектрической постоянной также определить длину зонда. При незагрязненном зонде или зонде, на котором не образовано никаких осаждений, можно также сделать вывод о качестве определенной диэлектрической постоянной. Если вычисленная длина зонда лежит в диапазоне вокруг параметризированной длины зонда, то можно исходить из хорошо определенной диэлектрической постоянной. Разумеется, можно качество также представить, например, в процентах 0% … 100%, в зависимости от того, насколько далеко расходятся вычисленная длина зонда и параметризированная длина зонда.
Распознавание накрытых помеховых эхо-сигналов
Накрытый помеховый эхо-сигнал представляет место отражения, которое находится под измеряемой средой или уже покрыто средой. Сигнальная составляющая, которая проникает в среду, может отражаться на уже покрытом месте отражения и вырисовываться как эхо-сигнал на эхо-кривой. Помеховый эхо-сигнал означает здесь, что он не относится к уровню заполнения и поэтому оказывает помеховое влияние на принимаемый сигнал.
Для определения накрытых эхо-сигналов требуются:
1. Трек к уровню заполнения
2. Любой трек ниже трека уровня заполнения.
Для каждого трека вычисляется «положение дна» dBottom. Если dBottom лежит в пределах длины зонда, то необходимым образом речь идет о накрытом помеховом эхо-сигнале, так как проекция положения на метрически измеряемую величину лежит в пределах длины зонда. Если вычисленное положение дна лежит за пределами длины зонда, то речь может идти только о многократном отражении.
Фиг.10 показывает блок-схему последовательности операций способа согласно примеру осуществления изобретения.
На этапе 1001 излучается передаваемый сигнал в форме электромагнитного или акустического импульса от передающего блока в направлении поверхности загруженного продукта. Этот импульс затем отражается от различных отражателей в резервуаре, и получаемая в результате этого эхо-кривая, которая имеет соответствующие различные эхо-сигналы, регистрируется приемным блоком (этап 1002).
Приемный блок выдает затем на этапе 1003 эхо-кривую на блок оценки, который на этапе 1004 выполняет способ отслеживания для группировки эхо-сигналов. На этапе 1005 формируется линейное отношение между двумя треками, и на этапе 1006 из этого отношения определяются одна или более неизвестных.
Дополнительно следует отметить, что термины «включает в себя» и «имеет» не исключают и других элементов и этапов, и указание единственного числа не исключает множественного числа. Кроме того, следует отметить, что признаки или этапы, которые описаны выше со ссылками на приведенные примеры выполнения, могут быть применены в комбинации с другими признаками или этапами других вышеописанных примеров выполнения. Ссылочные позиции в пунктах формулы изобретения не следует рассматривать в качестве ограничения.
Заявленная группа изобретений относится к средствам для измерения уровня заполнения на основе времени распространения сигнала. Предложенное устройство измерения уровня заполнения содержит передающий блок для отправки передаваемого сигнала, который отражается на поверхности загруженного продукта заполняющей среды и по меньшей мере одном втором отражателе; приемный блок для регистрации отраженного переданного сигнала, который является эхо-кривой, которая имеет множество эхо-сигналов; блок оценки для выполнения способа отслеживания для группировки соответственно вызванных идентичными отражателями эхо-сигналов эхо-кривых, зарегистрированных в различные моменты времени, причем блок оценки выполнен с возможностью выполнения следующих этапов: (а) определение первого трека первой группы эхо-сигналов, которые вызваны первым отражателем, и второго трека второй группы эхо-сигналов, которые вызваны вторым отражателем, причем каждый трек описывает время распространения соответствующего переданного сигнала от передающего блока до ассоциированного с треком отражателя и обратно в приемный блок в различные моменты времени; (b) определение линейного отношения между первым треком и вторым треком, задаваемое линейным уравнением; (c) определение одной или нескольких неизвестных из линейного отношения между первым треком и вторым треком. Указанное устройство реализует соответствующий способ измерения уровня заполнения, а также реализованы процессор и машиночитаемый носитель, которые соответственно выполняют и хранят данный способ. Заявленная группа изобретений направлена на улучшение точности определения уровня заполнения емкости. 4 н. и 10 з.п. ф-лы, 10 ил.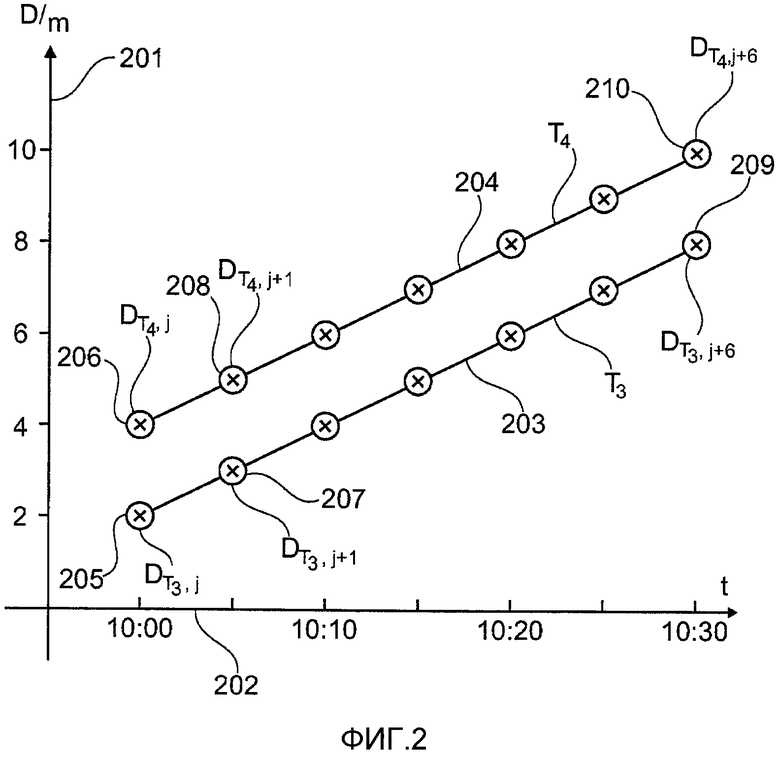
1. Устройство (500) измерения уровня заполнения на основе времени распространения сигнала, содержащее
передающий блок (501, 502) для отправки передаваемого сигнала (507), который отражается на поверхности (505) загруженного продукта заполняющей среды и по меньшей мере одном втором отражателе (506, 512);
приемный блок (501, 513) для регистрации отраженного переданного сигнала (509, 510), который является эхо-кривой (703), которая имеет множество эхо-сигналов (704, 701, 703);
блок (513) оценки для выполнения способа отслеживания для группировки соответственно вызванных идентичными отражателями эхо-сигналов эхо-кривых, зарегистрированных в различные моменты времени, причем блок оценки выполнен с возможностью выполнения следующих этапов:
(а) определение первого трека первой группы эхо-сигналов (701), которые вызваны первым отражателем, и второго трека второй группы эхо-сигналов (702), которые вызваны вторым отражателем, причем каждый трек описывает время распространения соответствующего переданного сигнала от передающего блока до ассоциированного с треком отражателя и обратно в приемный блок в различные моменты времени (t1, t2, t3, t4);
(b) определение линейного отношения между первым треком и вторым треком, задаваемое следующим уравнением:

где 
где 
где а0 и а1 - параметры прямой, которые описывают линейную взаимосвязь между положением трека Т1 и трека Т2,
где еk - ошибка взаимосвязи для измерения в момент времени k,
и
(c) определение одной или нескольких неизвестных из линейного отношения между первым треком и вторым треком.
2. Устройство измерения уровня заполнения на основе времени распространения сигнала по п. 1,
причем первая группа эхо-сигналов представляет собой переданные сигналы (509), отраженные на поверхности (505) загруженного продукта.
3. Устройство измерения уровня заполнения на основе времени распространения сигнала по п. 1,
причем в случае неизвестных речь идет об ожидаемом положении эхо-сигнала другой эхо-кривой, ассоциированного со вторым треком, причем эта другая эхо-кривая регистрируется в более поздний момент времени, чем другие эхо-кривые.
4. Устройство измерения уровня заполнения на основе времени распространения сигнала по п. 1,
причем в случае неизвестных речь идет о диэлектрической постоянной заполняющей среды (504).
5. Устройство измерения уровня заполнения на основе времени распространения сигнала по любому из пп. 1-4,
причем устройство (500) измерения уровня заполнения на основе времени распространения представляет собой TDR-устройство измерения уровня заполнения,
причем в случае неизвестной речь идет о длине зонда (601, 602) TDR-устройства измерения уровня заполнения.
6. Устройство измерения уровня заполнения на основе времени распространения сигнала по п. 5,
причем блок (513) оценки выполнен таким образом, чтобы из определенной длины зонда (601, 602) путем сравнения с фактической длиной зонда распознавать, загрязнен ли зонд.
7. Устройство измерения уровня заполнения на основе времени распространения сигнала по п. 5,
причем блок (513) оценки выполнен так, чтобы из определенной длины зонда (601, 602) посредством сравнения с фактической длиной зонда вычислять качество определенной диэлектрической постоянной.
8. Устройство измерения уровня заполнения на основе времени распространения сигнала по п. 1,
причем в случае неизвестной речь идет о высоте (520) резервуара, в котором находится заполняющая среда, или о позиции стационарного отражателя (512, 506) в резервуаре.
9. Устройство измерения уровня заполнения на основе времени распространения сигнала по любому из пп. 6-8,
причем блок (513) оценки выполнен с возможностью выполнения следующих этапов:
вычисление положения дна резервуара dBottom;
определение, лежит ли вычисленное положение дна резервуара выше нижнего конца зонда;
классификация вычисленного положения из положения отражателя, который не является дном резервуара, если вычисленное положение дна резервуара лежит выше нижнего конца зонда.
10. Устройство измерения уровня заполнения на основе времени распространения сигнала по любому из пп. 1-4, 6-8,
причем определение треков и линейного отношения между первым треком и вторым треком осуществляется способом оценки.
11. Устройство измерения уровня заполнения на основе времени распространения сигнала по любому из пп. 1-4, 6-8,
причем определение линейного отношения между первым треком и вторым треком осуществляется посредством рекурсивного способа.
12. Способ измерения уровня заполнения на основе времени распространения для выполнения способа отслеживания для группировки соответственно вызванных идентичными отражателями эхо-сигналов эхо-кривых, зарегистрированных в разные моменты времени, причем способ включает в себя следующие этапы:
передача передаваемого сигнала, который отражается от поверхности (505) загруженного продукта заполняющей среды (504) и по меньшей мере одного второго отражателя (512, 506);
регистрация отраженного переданного сигнала (509, 510), который представляет собой эхо-кривую (703), которая содержит множество эхо-сигналов (704, 701, 702);
определение первого трека первой группы эхо-сигналов (701), которые вызваны первым отражателем, и второго трека второй группы эхо-сигналов (702), которые вызваны вторым отражателем, причем каждый трек описывает время распространения соответствующего переданного сигнала от передающего блока до ассоциированного с треком отражателя и обратно в приемный блок в различные моменты времени (t1, t2, t3, t4);
определение линейного отношения между первым треком и вторым треком, задаваемое следующим уравнением:
где
где
где а0 и а1 - параметры прямой, которые описывают линейную взаимосвязь между положением трека Т1 и трека Т2,
где еk - ошибка взаимосвязи для измерения в момент времени k,
и
определение одной или нескольких неизвестных из линейного отношения между первым треком и вторым треком.
13. Процессор (513) для выполнения способа отслеживания для группировки соответственно вызванных идентичными отражателями эхо-сигналов эхо-кривых, зарегистрированных в различные моменты времени, причем процессор выполнен для осуществления следующих этапов:
определение первого трека первой группы эхо-сигналов (701), которые вызваны первым отражателем, и второго трека второй группы эхо-сигналов (702), которые вызваны вторым отражателем, причем каждый трек описывает время распространения соответствующего переданного сигнала от передающего блока до ассоциированного с треком отражателя и обратно в приемный блок в различные моменты времени (t1, t2, t3, t4);
определение линейного отношения между первым треком и вторым треком, задаваемое следующим уравнением:
где
где
где а0 и а1 - параметры прямой, которые описывают линейную взаимосвязь между положением трека Т1 и трека Т2,
где еk - ошибка взаимосвязи для измерения в момент времени k,
и
определение одной или нескольких неизвестных из линейного отношения между первым треком и вторым треком.
14. Машиночитаемый носитель, на котором хранится программа для выполнения способа отслеживания для группировки соответственно вызванных идентичными отражателями эхо-сигналов эхо-кривых, зарегистрированных в различные моменты времени, которая, при выполнении на процессоре устройства измерения уровня заполнения на основе времени распространения сигнала, инструктирует процессор выполнять следующие этапы:
определение первого трека первой группы эхо-сигналов (701), которые вызваны первым отражателем, и второго трека второй группы эхо-сигналов (702), которые вызваны вторым отражателем, причем каждый трек описывает время распространения соответствующего переданного сигнала от передающего блока до ассоциированного с треком отражателя и обратно в приемный блок в различные моменты времени (t1, t2, t3, t4);
определение линейного отношения между первым треком и вторым треком, задаваемое следующим уравнением:
где
где
где а0 и а1 - параметры прямой, которые описывают линейную взаимосвязь между положением трека Т1 и трека Т2,
где еk - ошибка взаимосвязи для измерения в момент времени k,
и
определение одной или нескольких неизвестных из линейного отношения между первым треком и вторым треком.
| EP 1906158 A1, 02.04.2008 | |||
| Дуговая сталеплавильная печь | 1982 |
|
SU1020735A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ДВЕРНОЙ ДЕМПФЕР (ВАРИАНТЫ) И СНАБЖЕННЫЙ ИМ ЭЛЕКТРОННЫЙ БЫТОВОЙ ПРИБОР | 2005 |
|
RU2309235C2 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА ЗАХОЛАЖИВАНИЯ ГАЗА | 1999 |
|
RU2148219C1 |

